
upload
Browse files- last.pth +3 -0
- preview_1step_scope_1/action_val.json +0 -0
- preview_1step_scope_1/l1.py +49 -0
- preview_1step_scope_1/plot.py +42 -0
- preview_1step_scope_1/val.jpg +0 -0
last.pth
ADDED
|
@@ -0,0 +1,3 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
version https://git-lfs.github.com/spec/v1
|
| 2 |
+
oid sha256:bc835f5b152b8038e7446f8db9cd7c491339bdb9fc2c5def098436c708d6cd82
|
| 3 |
+
size 8444266
|
preview_1step_scope_1/action_val.json
ADDED
|
The diff for this file is too large to render.
See raw diff
|
|
|
preview_1step_scope_1/l1.py
ADDED
|
@@ -0,0 +1,49 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
import json
|
| 2 |
+
import numpy as np
|
| 3 |
+
|
| 4 |
+
def denormalize_func(normalized_tensor, min_val=0, max_val=200):
|
| 5 |
+
tensor = (normalized_tensor + 1) / 2
|
| 6 |
+
tensor = tensor * (max_val - min_val) + min_val
|
| 7 |
+
# tensor = t.round(tensor).long()
|
| 8 |
+
return tensor
|
| 9 |
+
|
| 10 |
+
|
| 11 |
+
# 读取JSON文件
|
| 12 |
+
with open('action_val.json', 'r') as file:
|
| 13 |
+
data = json.load(file)
|
| 14 |
+
|
| 15 |
+
# 初始化误差列表
|
| 16 |
+
steering_errors = []
|
| 17 |
+
speed_errors = []
|
| 18 |
+
|
| 19 |
+
# 遍历每个场景,计算L1误差
|
| 20 |
+
for scene_data in data:
|
| 21 |
+
action_pred = scene_data["action_pred"]
|
| 22 |
+
action_gt = scene_data["action_gt"]
|
| 23 |
+
|
| 24 |
+
# 确保 action_pred 和 action_gt 的长度一致
|
| 25 |
+
min_length = min(len(action_pred), len(action_gt))
|
| 26 |
+
|
| 27 |
+
# 计算每个时间步的转向角和速度误差
|
| 28 |
+
for i in range(min_length):
|
| 29 |
+
pred_steering, pred_speed = action_pred[i]
|
| 30 |
+
gt_steering, gt_speed = action_gt[i]
|
| 31 |
+
|
| 32 |
+
# pred_steering = denormalize_func(pred_steering, -500, 500)
|
| 33 |
+
# gt_steering = denormalize_func(gt_steering, -500, 500)
|
| 34 |
+
# pred_speed = denormalize_func(pred_speed, 0, 70)
|
| 35 |
+
# gt_speed = denormalize_func(gt_speed, 0, 70)
|
| 36 |
+
|
| 37 |
+
# 计算转向角和速度的绝对误差
|
| 38 |
+
steering_error = abs(pred_steering - gt_steering)
|
| 39 |
+
speed_error = abs(pred_speed - gt_speed)
|
| 40 |
+
|
| 41 |
+
steering_errors.append(steering_error)
|
| 42 |
+
speed_errors.append(speed_error)
|
| 43 |
+
|
| 44 |
+
# 计算转向角和速度的平均L1误差
|
| 45 |
+
mean_steering_error = np.mean(steering_errors)
|
| 46 |
+
mean_speed_error = np.mean(speed_errors)
|
| 47 |
+
|
| 48 |
+
print("平均转向角L1误差:", mean_steering_error)
|
| 49 |
+
print("平均速度L1误差:", mean_speed_error)
|
preview_1step_scope_1/plot.py
ADDED
|
@@ -0,0 +1,42 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
import json
|
| 2 |
+
import matplotlib.pyplot as plt
|
| 3 |
+
|
| 4 |
+
# 读取JSON文件
|
| 5 |
+
with open('action_val.json', 'r') as file:
|
| 6 |
+
data = json.load(file)
|
| 7 |
+
|
| 8 |
+
# 提取数据
|
| 9 |
+
scene_data = data[1]
|
| 10 |
+
action_pred = scene_data["action_pred"]
|
| 11 |
+
action_gt = scene_data["action_gt"]
|
| 12 |
+
|
| 13 |
+
# 提取转向角和速度
|
| 14 |
+
pred_steering_angles = [a[0] for a in action_pred]
|
| 15 |
+
pred_speeds = [a[1] for a in action_pred]
|
| 16 |
+
|
| 17 |
+
gt_steering_angles = [a[0] for a in action_gt]
|
| 18 |
+
gt_speeds = [a[1] for a in action_gt]
|
| 19 |
+
|
| 20 |
+
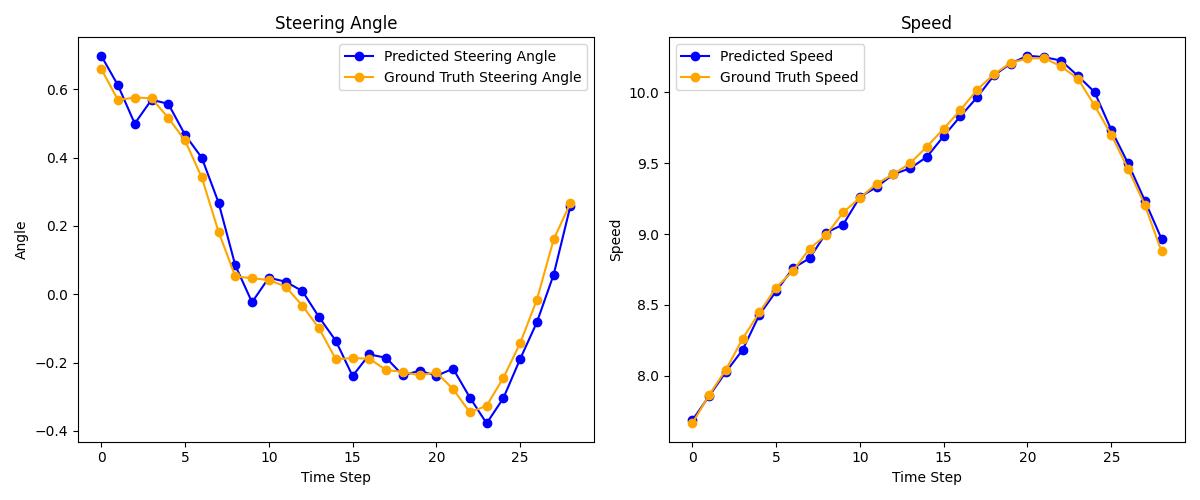
# 绘图
|
| 21 |
+
plt.figure(figsize=(12, 5))
|
| 22 |
+
|
| 23 |
+
# 转向角的 plot
|
| 24 |
+
plt.subplot(1, 2, 1)
|
| 25 |
+
plt.plot(pred_steering_angles, label='Predicted Steering Angle', color='blue', marker='o')
|
| 26 |
+
plt.plot(gt_steering_angles, label='Ground Truth Steering Angle', color='orange', marker='o')
|
| 27 |
+
plt.title("Steering Angle")
|
| 28 |
+
plt.xlabel("Time Step")
|
| 29 |
+
plt.ylabel("Angle")
|
| 30 |
+
plt.legend()
|
| 31 |
+
|
| 32 |
+
# 速度的 plot
|
| 33 |
+
plt.subplot(1, 2, 2)
|
| 34 |
+
plt.plot(pred_speeds, label='Predicted Speed', color='blue', marker='o')
|
| 35 |
+
plt.plot(gt_speeds, label='Ground Truth Speed', color='orange', marker='o')
|
| 36 |
+
plt.title("Speed")
|
| 37 |
+
plt.xlabel("Time Step")
|
| 38 |
+
plt.ylabel("Speed")
|
| 39 |
+
plt.legend()
|
| 40 |
+
|
| 41 |
+
plt.tight_layout()
|
| 42 |
+
plt.savefig('val.jpg')
|
preview_1step_scope_1/val.jpg
ADDED
|