---
license: mit
---
# Foundation Tactile (FoTa) - a multi-sensor multi-task large dataset for tactile sensing
This repository stores the FoTa dataset and the pretrained checkpoints of Transferable Tactile Transformers (T3).
PaperCodeColab
[[Project Website]](https://t3.alanz.info/)
[Jialiang (Alan) Zhao](https://alanz.info/),
[Yuxiang Ma](https://yuxiang-ma.github.io/),
[Lirui Wang](https://liruiw.github.io/), and
[Edward H. Adelson](https://persci.mit.edu/people/adelson/)
MIT CSAIL
## Overview
FoTa was released with Transferable Tactile Transformers (T3) as a large dataset for tactile representation learning.
It aggregates some of the largest open-source tactile datasets, and it is released in a unified [WebDataset](https://webdataset.github.io/webdataset/) format.
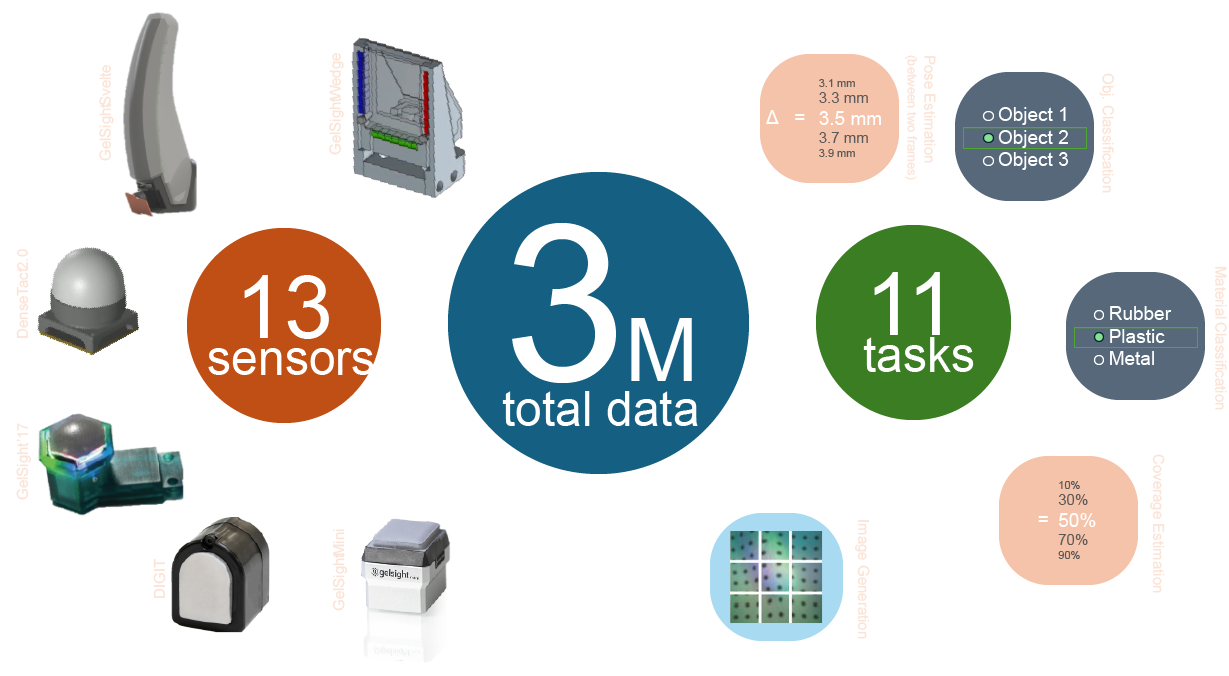
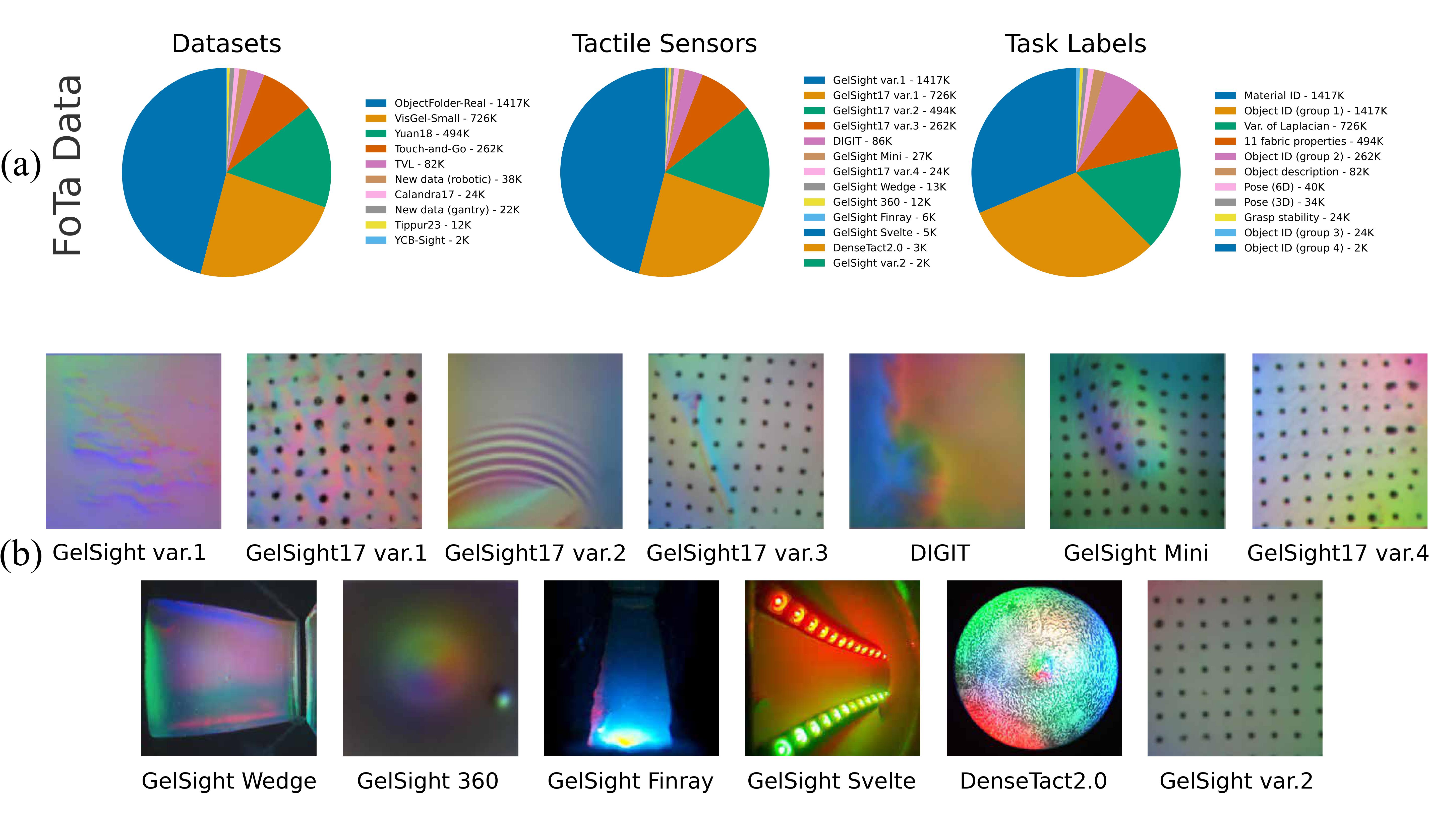
Fota contains over 3 million tactile images collected from 13 camera-based tactile sensors and 11 tasks.
## File structure
After downloading and unzipping, the file structure of FoTa looks like:
```
dataset_1
|---- train
|---- count.txt
|---- data_000000.tar
|---- data_000001.tar
|---- ...
|---- val
|---- count.txt
|---- data_000000.tar
|---- ...
dataset_2
:
dataset_n
```
Each `.tar` file is one sharded dataset. At runtime, wds (WebDataset) api automatically loads, shuffles, and unpacks all shards on demand.
The nicest part of having a `.tar` file, instead of saving all raw data into matrices (e.g. `.npz` for zarr), is that `.tar` is easy to visualize without the need of any code.
Simply double click on any `.tar` file to check its content.
Although you will never need to unpack a `.tar` manually (wds does that automatically), it helps to understand the logic and file structure.
```
data_000000.tar
|---- file_name_1.jpg
|---- file_name_1.json
:
|---- file_name_n.jpg
|---- file_name_n.json
```
The `.jpg` files are tactile images, and the `.json` files store task-specific labels.
For more details on operations of the paper, checkout our GitHub repository and Colab tutorial.
## Getting started
Checkout our [Colab](https://colab.research.google.com/drive/1MmO9w1y59Gy6ds0iKlW04olszGko56Vf?usp=sharing) for a step-by-step tutorial!
## Download and unpack
Download either with the web interface or using the python interface:
```sh
pip install huggingface_hub
```
then inside a python script or in ipython, run the following:
```python
from huggingface_hub import snapshot_download
snapshot_download(repo_id="alanz-mit/FoundationTactile", repo_type="dataset", local_dir=".", local_dir_use_symlinks=False)
```
To unpack the dataset which has been split into many `.zip` files:
```sh
cd dataset
zip -s 0 FoTa_dataset.zip --out unsplit_FoTa_dataset.zip
unzip unsplit_FoTa_dataset.zip
```
## Citation
```
@article{zhao2024transferable,
title={Transferable Tactile Transformers for Representation Learning Across Diverse Sensors and Tasks},
author={Jialiang Zhao and Yuxiang Ma and Lirui Wang and Edward H. Adelson},
year={2024},
eprint={2406.13640},
archivePrefix={arXiv},
}
```
MIT License.
 ## Overview
FoTa was released with Transferable Tactile Transformers (T3) as a large dataset for tactile representation learning.
It aggregates some of the largest open-source tactile datasets, and it is released in a unified [WebDataset](https://webdataset.github.io/webdataset/) format.
Fota contains over 3 million tactile images collected from 13 camera-based tactile sensors and 11 tasks.
## File structure
After downloading and unzipping, the file structure of FoTa looks like:
```
dataset_1
|---- train
|---- count.txt
|---- data_000000.tar
|---- data_000001.tar
|---- ...
|---- val
|---- count.txt
|---- data_000000.tar
|---- ...
dataset_2
:
dataset_n
```
Each `.tar` file is one sharded dataset. At runtime, wds (WebDataset) api automatically loads, shuffles, and unpacks all shards on demand.
The nicest part of having a `.tar` file, instead of saving all raw data into matrices (e.g. `.npz` for zarr), is that `.tar` is easy to visualize without the need of any code.
Simply double click on any `.tar` file to check its content.
Although you will never need to unpack a `.tar` manually (wds does that automatically), it helps to understand the logic and file structure.
```
data_000000.tar
|---- file_name_1.jpg
|---- file_name_1.json
:
|---- file_name_n.jpg
|---- file_name_n.json
```
The `.jpg` files are tactile images, and the `.json` files store task-specific labels.
For more details on operations of the paper, checkout our GitHub repository and Colab tutorial.
## Overview
FoTa was released with Transferable Tactile Transformers (T3) as a large dataset for tactile representation learning.
It aggregates some of the largest open-source tactile datasets, and it is released in a unified [WebDataset](https://webdataset.github.io/webdataset/) format.
Fota contains over 3 million tactile images collected from 13 camera-based tactile sensors and 11 tasks.
## File structure
After downloading and unzipping, the file structure of FoTa looks like:
```
dataset_1
|---- train
|---- count.txt
|---- data_000000.tar
|---- data_000001.tar
|---- ...
|---- val
|---- count.txt
|---- data_000000.tar
|---- ...
dataset_2
:
dataset_n
```
Each `.tar` file is one sharded dataset. At runtime, wds (WebDataset) api automatically loads, shuffles, and unpacks all shards on demand.
The nicest part of having a `.tar` file, instead of saving all raw data into matrices (e.g. `.npz` for zarr), is that `.tar` is easy to visualize without the need of any code.
Simply double click on any `.tar` file to check its content.
Although you will never need to unpack a `.tar` manually (wds does that automatically), it helps to understand the logic and file structure.
```
data_000000.tar
|---- file_name_1.jpg
|---- file_name_1.json
:
|---- file_name_n.jpg
|---- file_name_n.json
```
The `.jpg` files are tactile images, and the `.json` files store task-specific labels.
For more details on operations of the paper, checkout our GitHub repository and Colab tutorial.
 ## Getting started
Checkout our [Colab](https://colab.research.google.com/drive/1MmO9w1y59Gy6ds0iKlW04olszGko56Vf?usp=sharing) for a step-by-step tutorial!
## Download and unpack
Download either with the web interface or using the python interface:
```sh
pip install huggingface_hub
```
then inside a python script or in ipython, run the following:
```python
from huggingface_hub import snapshot_download
snapshot_download(repo_id="alanz-mit/FoundationTactile", repo_type="dataset", local_dir=".", local_dir_use_symlinks=False)
```
To unpack the dataset which has been split into many `.zip` files:
```sh
cd dataset
zip -s 0 FoTa_dataset.zip --out unsplit_FoTa_dataset.zip
unzip unsplit_FoTa_dataset.zip
```
## Citation
```
@article{zhao2024transferable,
title={Transferable Tactile Transformers for Representation Learning Across Diverse Sensors and Tasks},
author={Jialiang Zhao and Yuxiang Ma and Lirui Wang and Edward H. Adelson},
year={2024},
eprint={2406.13640},
archivePrefix={arXiv},
}
```
MIT License.
## Getting started
Checkout our [Colab](https://colab.research.google.com/drive/1MmO9w1y59Gy6ds0iKlW04olszGko56Vf?usp=sharing) for a step-by-step tutorial!
## Download and unpack
Download either with the web interface or using the python interface:
```sh
pip install huggingface_hub
```
then inside a python script or in ipython, run the following:
```python
from huggingface_hub import snapshot_download
snapshot_download(repo_id="alanz-mit/FoundationTactile", repo_type="dataset", local_dir=".", local_dir_use_symlinks=False)
```
To unpack the dataset which has been split into many `.zip` files:
```sh
cd dataset
zip -s 0 FoTa_dataset.zip --out unsplit_FoTa_dataset.zip
unzip unsplit_FoTa_dataset.zip
```
## Citation
```
@article{zhao2024transferable,
title={Transferable Tactile Transformers for Representation Learning Across Diverse Sensors and Tasks},
author={Jialiang Zhao and Yuxiang Ma and Lirui Wang and Edward H. Adelson},
year={2024},
eprint={2406.13640},
archivePrefix={arXiv},
}
```
MIT License.