
modelId
stringlengths 4
81
| tags
list | pipeline_tag
stringclasses 17
values | config
dict | downloads
int64 0
59.7M
| first_commit
timestamp[ns, tz=UTC] | card
stringlengths 51
438k
|
|---|---|---|---|---|---|---|
Coyotl/DialoGPT-test2-arthurmorgan
|
[
"pytorch",
"gpt2",
"text-generation",
"transformers",
"conversational"
] |
conversational
|
{
"architectures": [
"GPT2LMHeadModel"
],
"model_type": "gpt2",
"task_specific_params": {
"conversational": {
"max_length": 1000
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 7 | null |
---
library_name: stable-baselines3
tags:
- AntBulletEnv-v0
- deep-reinforcement-learning
- reinforcement-learning
- stable-baselines3
model-index:
- name: A2C
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: AntBulletEnv-v0
type: AntBulletEnv-v0
metrics:
- type: mean_reward
value: 1982.05 +/- 31.75
name: mean_reward
verified: false
---
# **A2C** Agent playing **AntBulletEnv-v0**
This is a trained model of a **A2C** agent playing **AntBulletEnv-v0**
using the [stable-baselines3 library](https://github.com/DLR-RM/stable-baselines3).
## Usage (with Stable-baselines3)
TODO: Add your code
```python
from stable_baselines3 import ...
from huggingface_sb3 import load_from_hub
...
```
|
Coyotl/DialoGPT-test3-arthurmorgan
|
[
"conversational"
] |
conversational
|
{
"architectures": null,
"model_type": null,
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 0 | null |
---
tags:
- LunarLander-v2
- ppo
- deep-reinforcement-learning
- reinforcement-learning
- custom-implementation
- deep-rl-course
model-index:
- name: PPO
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: LunarLander-v2
type: LunarLander-v2
metrics:
- type: mean_reward
value: -123.99 +/- 86.48
name: mean_reward
verified: false
---
# PPO Agent Playing LunarLander-v2
This is a trained model of a PPO agent playing LunarLander-v2.
# Hyperparameters
```python
{'exp_name': 'ppo'
'seed': 1
'torch_deterministic': True
'cuda': True
'track': False
'wandb_project_name': 'cleanRL'
'wandb_entity': None
'capture_video': False
'env_id': 'LunarLander-v2'
'total_timesteps': 50000
'learning_rate': 0.00025
'num_envs': 4
'num_steps': 128
'anneal_lr': True
'gae': True
'gamma': 0.99
'gae_lambda': 0.95
'num_minibatches': 4
'update_epochs': 4
'norm_adv': True
'clip_coef': 0.2
'clip_vloss': True
'ent_coef': 0.01
'vf_coef': 0.5
'max_grad_norm': 0.5
'target_kl': None
'repo_id': 'css919/ppo-LunarLander-v2'
'batch_size': 512
'minibatch_size': 128}
```
|
Craak/GJ0001
|
[] | null |
{
"architectures": null,
"model_type": null,
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 0 | null |
---
license: mit
tags:
- generated_from_trainer
datasets:
- imagefolder
model-index:
- name: Donut3
results: []
---
<!-- This model card has been generated automatically according to the information the Trainer had access to. You
should probably proofread and complete it, then remove this comment. -->
# Donut3
This model is a fine-tuned version of [humayoun/Donut2](https://huggingface.co/humayoun/Donut2) on the imagefolder dataset.
## Model description
More information needed
## Intended uses & limitations
More information needed
## Training and evaluation data
More information needed
## Training procedure
### Training hyperparameters
The following hyperparameters were used during training:
- learning_rate: 2e-05
- train_batch_size: 2
- eval_batch_size: 8
- seed: 42
- optimizer: Adam with betas=(0.9,0.999) and epsilon=1e-08
- lr_scheduler_type: linear
- num_epochs: 10
- mixed_precision_training: Native AMP
### Training results
### Framework versions
- Transformers 4.27.0.dev0
- Pytorch 1.13.1+cu116
- Datasets 2.10.0
- Tokenizers 0.13.2
|
CracklesCreeper/Piglin-Talks-Harry-Potter
|
[
"pytorch",
"gpt2",
"text-generation",
"transformers",
"conversational"
] |
conversational
|
{
"architectures": [
"GPT2LMHeadModel"
],
"model_type": "gpt2",
"task_specific_params": {
"conversational": {
"max_length": 1000
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 10 | 2023-02-27T18:12:29Z |
---
tags:
- unity-ml-agents
- ml-agents
- deep-reinforcement-learning
- reinforcement-learning
- ML-Agents-Huggy
library_name: ml-agents
---
# **ppo** Agent playing **Huggy**
This is a trained model of a **ppo** agent playing **Huggy** using the [Unity ML-Agents Library](https://github.com/Unity-Technologies/ml-agents).
## Usage (with ML-Agents)
The Documentation: https://github.com/huggingface/ml-agents#get-started
We wrote a complete tutorial to learn to train your first agent using ML-Agents and publish it to the Hub:
### Resume the training
```
mlagents-learn <your_configuration_file_path.yaml> --run-id=<run_id> --resume
```
### Watch your Agent play
You can watch your agent **playing directly in your browser:**.
1. Go to https://huggingface.co/spaces/unity/ML-Agents-Huggy
2. Step 1: Write your model_id: mcondor/ppo-Huggy
3. Step 2: Select your *.nn /*.onnx file
4. Click on Watch the agent play 👀
|
Crives/distilbert-base-uncased-finetuned-emotion
|
[
"pytorch",
"tensorboard",
"distilbert",
"text-classification",
"dataset:emotion",
"transformers",
"generated_from_trainer",
"license:apache-2.0",
"model-index"
] |
text-classification
|
{
"architectures": [
"DistilBertForSequenceClassification"
],
"model_type": "distilbert",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 31 | null |
---
library_name: stable-baselines3
tags:
- EnduroNoFrameskip-v4
- deep-reinforcement-learning
- reinforcement-learning
- stable-baselines3
model-index:
- name: PPO
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: EnduroNoFrameskip-v4
type: EnduroNoFrameskip-v4
metrics:
- type: mean_reward
value: 1028.00 +/- 144.74
name: mean_reward
verified: false
---
# **PPO** Agent playing **EnduroNoFrameskip-v4**
This is a trained model of a **PPO** agent playing **EnduroNoFrameskip-v4**
using the [stable-baselines3 library](https://github.com/DLR-RM/stable-baselines3)
and the [RL Zoo](https://github.com/DLR-RM/rl-baselines3-zoo).
The RL Zoo is a training framework for Stable Baselines3
reinforcement learning agents,
with hyperparameter optimization and pre-trained agents included.
## Usage (with SB3 RL Zoo)
RL Zoo: https://github.com/DLR-RM/rl-baselines3-zoo<br/>
SB3: https://github.com/DLR-RM/stable-baselines3<br/>
SB3 Contrib: https://github.com/Stable-Baselines-Team/stable-baselines3-contrib
Install the RL Zoo (with SB3 and SB3-Contrib):
```bash
pip install rl_zoo3
```
```
# Download model and save it into the logs/ folder
python -m rl_zoo3.load_from_hub --algo ppo --env EnduroNoFrameskip-v4 -orga qgallouedec -f logs/
python -m rl_zoo3.enjoy --algo ppo --env EnduroNoFrameskip-v4 -f logs/
```
If you installed the RL Zoo3 via pip (`pip install rl_zoo3`), from anywhere you can do:
```
python -m rl_zoo3.load_from_hub --algo ppo --env EnduroNoFrameskip-v4 -orga qgallouedec -f logs/
python -m rl_zoo3.enjoy --algo ppo --env EnduroNoFrameskip-v4 -f logs/
```
## Training (with the RL Zoo)
```
python -m rl_zoo3.train --algo ppo --env EnduroNoFrameskip-v4 -f logs/
# Upload the model and generate video (when possible)
python -m rl_zoo3.push_to_hub --algo ppo --env EnduroNoFrameskip-v4 -f logs/ -orga qgallouedec
```
## Hyperparameters
```python
OrderedDict([('batch_size', 256),
('clip_range', 'lin_0.1'),
('ent_coef', 0.01),
('env_wrapper',
['stable_baselines3.common.atari_wrappers.AtariWrapper']),
('frame_stack', 4),
('learning_rate', 'lin_2.5e-4'),
('n_envs', 8),
('n_epochs', 4),
('n_steps', 128),
('n_timesteps', 10000000.0),
('policy', 'CnnPolicy'),
('vf_coef', 0.5),
('normalize', False)])
```
|
Cryptikdw/DialoGPT-small-rick
|
[
"pytorch",
"gpt2",
"text-generation",
"transformers",
"conversational"
] |
conversational
|
{
"architectures": [
"GPT2LMHeadModel"
],
"model_type": "gpt2",
"task_specific_params": {
"conversational": {
"max_length": 1000
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 7 | null |
---
tags:
- unity-ml-agents
- ml-agents
- deep-reinforcement-learning
- reinforcement-learning
- ML-Agents-SnowballTarget
library_name: ml-agents
---
# **ppo** Agent playing **SnowballTarget**
This is a trained model of a **ppo** agent playing **SnowballTarget** using the [Unity ML-Agents Library](https://github.com/Unity-Technologies/ml-agents).
## Usage (with ML-Agents)
The Documentation: https://github.com/huggingface/ml-agents#get-started
We wrote a complete tutorial to learn to train your first agent using ML-Agents and publish it to the Hub:
### Resume the training
```
mlagents-learn <your_configuration_file_path.yaml> --run-id=<run_id> --resume
```
### Watch your Agent play
You can watch your agent **playing directly in your browser:**.
1. Go to https://huggingface.co/spaces/unity/ML-Agents-SnowballTarget
2. Step 1: Write your model_id: dor88/ppo-SnowballTarget
3. Step 2: Select your *.nn /*.onnx file
4. Click on Watch the agent play 👀
|
Crystal/distilbert-base-uncased-finetuned-squad
|
[] | null |
{
"architectures": null,
"model_type": null,
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 0 | null |
---
license: apache-2.0
tags:
- generated_from_trainer
model-index:
- name: fin_sentiment
results: []
---
<!-- This model card has been generated automatically according to the information the Trainer had access to. You
should probably proofread and complete it, then remove this comment. -->
# fin_sentiment
This model is a fine-tuned version of [distilbert-base-uncased](https://huggingface.co/distilbert-base-uncased) on the None dataset.
## Model description
More information needed
## Intended uses & limitations
More information needed
## Training and evaluation data
More information needed
## Training procedure
### Training hyperparameters
The following hyperparameters were used during training:
- learning_rate: 5e-05
- train_batch_size: 8
- eval_batch_size: 8
- seed: 42
- optimizer: Adam with betas=(0.9,0.999) and epsilon=1e-08
- lr_scheduler_type: linear
- num_epochs: 1
### Training results
| Training Loss | Epoch | Step | Validation Loss | Accuracy |
|:-------------:|:-----:|:----:|:---------------:|:--------:|
| No log | 1.0 | 125 | 0.5234 | 0.7840 |
### Framework versions
- Transformers 4.26.1
- Pytorch 1.13.1+cu116
- Datasets 2.10.0
- Tokenizers 0.13.2
|
DCU-NLP/bert-base-irish-cased-v1
|
[
"pytorch",
"tf",
"bert",
"fill-mask",
"transformers",
"generated_from_keras_callback",
"autotrain_compatible"
] |
fill-mask
|
{
"architectures": [
"BertForMaskedLM"
],
"model_type": "bert",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 1,244 | 2023-02-27T18:45:53Z |
---
library_name: stable-baselines3
tags:
- QbertNoFrameskip-v4
- deep-reinforcement-learning
- reinforcement-learning
- stable-baselines3
model-index:
- name: PPO
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: QbertNoFrameskip-v4
type: QbertNoFrameskip-v4
metrics:
- type: mean_reward
value: 12212.50 +/- 2540.92
name: mean_reward
verified: false
---
# **PPO** Agent playing **QbertNoFrameskip-v4**
This is a trained model of a **PPO** agent playing **QbertNoFrameskip-v4**
using the [stable-baselines3 library](https://github.com/DLR-RM/stable-baselines3)
and the [RL Zoo](https://github.com/DLR-RM/rl-baselines3-zoo).
The RL Zoo is a training framework for Stable Baselines3
reinforcement learning agents,
with hyperparameter optimization and pre-trained agents included.
## Usage (with SB3 RL Zoo)
RL Zoo: https://github.com/DLR-RM/rl-baselines3-zoo<br/>
SB3: https://github.com/DLR-RM/stable-baselines3<br/>
SB3 Contrib: https://github.com/Stable-Baselines-Team/stable-baselines3-contrib
Install the RL Zoo (with SB3 and SB3-Contrib):
```bash
pip install rl_zoo3
```
```
# Download model and save it into the logs/ folder
python -m rl_zoo3.load_from_hub --algo ppo --env QbertNoFrameskip-v4 -orga qgallouedec -f logs/
python -m rl_zoo3.enjoy --algo ppo --env QbertNoFrameskip-v4 -f logs/
```
If you installed the RL Zoo3 via pip (`pip install rl_zoo3`), from anywhere you can do:
```
python -m rl_zoo3.load_from_hub --algo ppo --env QbertNoFrameskip-v4 -orga qgallouedec -f logs/
python -m rl_zoo3.enjoy --algo ppo --env QbertNoFrameskip-v4 -f logs/
```
## Training (with the RL Zoo)
```
python -m rl_zoo3.train --algo ppo --env QbertNoFrameskip-v4 -f logs/
# Upload the model and generate video (when possible)
python -m rl_zoo3.push_to_hub --algo ppo --env QbertNoFrameskip-v4 -f logs/ -orga qgallouedec
```
## Hyperparameters
```python
OrderedDict([('batch_size', 256),
('clip_range', 'lin_0.1'),
('ent_coef', 0.01),
('env_wrapper',
['stable_baselines3.common.atari_wrappers.AtariWrapper']),
('frame_stack', 4),
('learning_rate', 'lin_2.5e-4'),
('n_envs', 8),
('n_epochs', 4),
('n_steps', 128),
('n_timesteps', 10000000.0),
('policy', 'CnnPolicy'),
('vf_coef', 0.5),
('normalize', False)])
```
|
DCU-NLP/electra-base-irish-cased-discriminator-v1
|
[
"pytorch",
"electra",
"pretraining",
"ga",
"transformers",
"irish",
"license:apache-2.0"
] | null |
{
"architectures": [
"ElectraForPreTraining"
],
"model_type": "electra",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 4 | 2023-02-27T18:46:42Z |
---
library_name: stable-baselines3
tags:
- QbertNoFrameskip-v4
- deep-reinforcement-learning
- reinforcement-learning
- stable-baselines3
model-index:
- name: PPO
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: QbertNoFrameskip-v4
type: QbertNoFrameskip-v4
metrics:
- type: mean_reward
value: 14842.50 +/- 2475.08
name: mean_reward
verified: false
---
# **PPO** Agent playing **QbertNoFrameskip-v4**
This is a trained model of a **PPO** agent playing **QbertNoFrameskip-v4**
using the [stable-baselines3 library](https://github.com/DLR-RM/stable-baselines3)
and the [RL Zoo](https://github.com/DLR-RM/rl-baselines3-zoo).
The RL Zoo is a training framework for Stable Baselines3
reinforcement learning agents,
with hyperparameter optimization and pre-trained agents included.
## Usage (with SB3 RL Zoo)
RL Zoo: https://github.com/DLR-RM/rl-baselines3-zoo<br/>
SB3: https://github.com/DLR-RM/stable-baselines3<br/>
SB3 Contrib: https://github.com/Stable-Baselines-Team/stable-baselines3-contrib
Install the RL Zoo (with SB3 and SB3-Contrib):
```bash
pip install rl_zoo3
```
```
# Download model and save it into the logs/ folder
python -m rl_zoo3.load_from_hub --algo ppo --env QbertNoFrameskip-v4 -orga qgallouedec -f logs/
python -m rl_zoo3.enjoy --algo ppo --env QbertNoFrameskip-v4 -f logs/
```
If you installed the RL Zoo3 via pip (`pip install rl_zoo3`), from anywhere you can do:
```
python -m rl_zoo3.load_from_hub --algo ppo --env QbertNoFrameskip-v4 -orga qgallouedec -f logs/
python -m rl_zoo3.enjoy --algo ppo --env QbertNoFrameskip-v4 -f logs/
```
## Training (with the RL Zoo)
```
python -m rl_zoo3.train --algo ppo --env QbertNoFrameskip-v4 -f logs/
# Upload the model and generate video (when possible)
python -m rl_zoo3.push_to_hub --algo ppo --env QbertNoFrameskip-v4 -f logs/ -orga qgallouedec
```
## Hyperparameters
```python
OrderedDict([('batch_size', 256),
('clip_range', 'lin_0.1'),
('ent_coef', 0.01),
('env_wrapper',
['stable_baselines3.common.atari_wrappers.AtariWrapper']),
('frame_stack', 4),
('learning_rate', 'lin_2.5e-4'),
('n_envs', 8),
('n_epochs', 4),
('n_steps', 128),
('n_timesteps', 10000000.0),
('policy', 'CnnPolicy'),
('vf_coef', 0.5),
('normalize', False)])
```
|
DCU-NLP/electra-base-irish-cased-generator-v1
|
[
"pytorch",
"electra",
"fill-mask",
"ga",
"transformers",
"irish",
"license:apache-2.0",
"autotrain_compatible"
] |
fill-mask
|
{
"architectures": [
"ElectraForMaskedLM"
],
"model_type": "electra",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 7 | null |
---
license: apache-2.0
tags:
- generated_from_trainer
model-index:
- name: my_awesome_asr_mind_model
results: []
---
<!-- This model card has been generated automatically according to the information the Trainer had access to. You
should probably proofread and complete it, then remove this comment. -->
# my_awesome_asr_mind_model
This model is a fine-tuned version of [facebook/wav2vec2-base](https://huggingface.co/facebook/wav2vec2-base) on the None dataset.
## Model description
More information needed
## Intended uses & limitations
More information needed
## Training and evaluation data
More information needed
## Training procedure
### Training hyperparameters
The following hyperparameters were used during training:
- learning_rate: 1e-05
- train_batch_size: 4
- eval_batch_size: 4
- seed: 42
- gradient_accumulation_steps: 2
- total_train_batch_size: 8
- optimizer: Adam with betas=(0.9,0.999) and epsilon=1e-08
- lr_scheduler_type: linear
- lr_scheduler_warmup_steps: 500
- training_steps: 500
### Framework versions
- Transformers 4.26.1
- Pytorch 1.13.1+cu116
- Datasets 2.10.1
- Tokenizers 0.13.2
|
DHBaek/gpt2-stackoverflow-question-contents-generator
|
[
"pytorch",
"gpt2",
"text-generation",
"transformers"
] |
text-generation
|
{
"architectures": [
"GPT2LMHeadModel"
],
"model_type": "gpt2",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": true,
"max_length": 50
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 14 | null |
---
library_name: stable-baselines3
tags:
- SpaceInvadersNoFrameskip-v4
- deep-reinforcement-learning
- reinforcement-learning
- stable-baselines3
model-index:
- name: PPO
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: SpaceInvadersNoFrameskip-v4
type: SpaceInvadersNoFrameskip-v4
metrics:
- type: mean_reward
value: 1018.50 +/- 575.85
name: mean_reward
verified: false
---
# **PPO** Agent playing **SpaceInvadersNoFrameskip-v4**
This is a trained model of a **PPO** agent playing **SpaceInvadersNoFrameskip-v4**
using the [stable-baselines3 library](https://github.com/DLR-RM/stable-baselines3)
and the [RL Zoo](https://github.com/DLR-RM/rl-baselines3-zoo).
The RL Zoo is a training framework for Stable Baselines3
reinforcement learning agents,
with hyperparameter optimization and pre-trained agents included.
## Usage (with SB3 RL Zoo)
RL Zoo: https://github.com/DLR-RM/rl-baselines3-zoo<br/>
SB3: https://github.com/DLR-RM/stable-baselines3<br/>
SB3 Contrib: https://github.com/Stable-Baselines-Team/stable-baselines3-contrib
Install the RL Zoo (with SB3 and SB3-Contrib):
```bash
pip install rl_zoo3
```
```
# Download model and save it into the logs/ folder
python -m rl_zoo3.load_from_hub --algo ppo --env SpaceInvadersNoFrameskip-v4 -orga qgallouedec -f logs/
python -m rl_zoo3.enjoy --algo ppo --env SpaceInvadersNoFrameskip-v4 -f logs/
```
If you installed the RL Zoo3 via pip (`pip install rl_zoo3`), from anywhere you can do:
```
python -m rl_zoo3.load_from_hub --algo ppo --env SpaceInvadersNoFrameskip-v4 -orga qgallouedec -f logs/
python -m rl_zoo3.enjoy --algo ppo --env SpaceInvadersNoFrameskip-v4 -f logs/
```
## Training (with the RL Zoo)
```
python -m rl_zoo3.train --algo ppo --env SpaceInvadersNoFrameskip-v4 -f logs/
# Upload the model and generate video (when possible)
python -m rl_zoo3.push_to_hub --algo ppo --env SpaceInvadersNoFrameskip-v4 -f logs/ -orga qgallouedec
```
## Hyperparameters
```python
OrderedDict([('batch_size', 256),
('clip_range', 'lin_0.1'),
('ent_coef', 0.01),
('env_wrapper',
['stable_baselines3.common.atari_wrappers.AtariWrapper']),
('frame_stack', 4),
('learning_rate', 'lin_2.5e-4'),
('n_envs', 8),
('n_epochs', 4),
('n_steps', 128),
('n_timesteps', 10000000.0),
('policy', 'CnnPolicy'),
('vf_coef', 0.5),
('normalize', False)])
```
|
DHBaek/xlm-roberta-large-korquad-mask
|
[
"pytorch",
"xlm-roberta",
"question-answering",
"transformers",
"autotrain_compatible"
] |
question-answering
|
{
"architectures": [
"XLMRobertaForQuestionAnswering"
],
"model_type": "xlm-roberta",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 9 | null |
# Vocabulary Trimmed [facebook/mbart-large-cc25](https://huggingface.co/facebook/mbart-large-cc25): `asahi417/mbart-large-cc25-trimmed-ja`
This model is a trimmed version of [facebook/mbart-large-cc25](https://huggingface.co/facebook/mbart-large-cc25) by [`vocabtrimmer`](https://github.com/asahi417/lm-vocab-trimmer), a tool for trimming vocabulary of language models to compress the model size.
Following table shows a summary of the trimming process.
| | facebook/mbart-large-cc25 | asahi417/mbart-large-cc25-trimmed-ja |
|:---------------------------|:----------------------------|:---------------------------------------|
| parameter_size_full | 610,851,840 | 386,891,776 |
| parameter_size_embedding | 512,055,296 | 64,135,168 |
| vocab_size | 250,027 | 31,316 |
| compression_rate_full | 100.0 | 63.34 |
| compression_rate_embedding | 100.0 | 12.53 |
|
DJSammy/bert-base-danish-uncased_BotXO-ai
|
[
"pytorch",
"jax",
"da",
"dataset:common_crawl",
"dataset:wikipedia",
"transformers",
"bert",
"masked-lm",
"license:cc-by-4.0",
"fill-mask"
] |
fill-mask
|
{
"architectures": null,
"model_type": null,
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 14 | null |
---
library_name: stable-baselines3
tags:
- PongNoFrameskip-v4
- deep-reinforcement-learning
- reinforcement-learning
- stable-baselines3
model-index:
- name: PPO
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: PongNoFrameskip-v4
type: PongNoFrameskip-v4
metrics:
- type: mean_reward
value: 20.80 +/- 0.40
name: mean_reward
verified: false
---
# **PPO** Agent playing **PongNoFrameskip-v4**
This is a trained model of a **PPO** agent playing **PongNoFrameskip-v4**
using the [stable-baselines3 library](https://github.com/DLR-RM/stable-baselines3)
and the [RL Zoo](https://github.com/DLR-RM/rl-baselines3-zoo).
The RL Zoo is a training framework for Stable Baselines3
reinforcement learning agents,
with hyperparameter optimization and pre-trained agents included.
## Usage (with SB3 RL Zoo)
RL Zoo: https://github.com/DLR-RM/rl-baselines3-zoo<br/>
SB3: https://github.com/DLR-RM/stable-baselines3<br/>
SB3 Contrib: https://github.com/Stable-Baselines-Team/stable-baselines3-contrib
Install the RL Zoo (with SB3 and SB3-Contrib):
```bash
pip install rl_zoo3
```
```
# Download model and save it into the logs/ folder
python -m rl_zoo3.load_from_hub --algo ppo --env PongNoFrameskip-v4 -orga qgallouedec -f logs/
python -m rl_zoo3.enjoy --algo ppo --env PongNoFrameskip-v4 -f logs/
```
If you installed the RL Zoo3 via pip (`pip install rl_zoo3`), from anywhere you can do:
```
python -m rl_zoo3.load_from_hub --algo ppo --env PongNoFrameskip-v4 -orga qgallouedec -f logs/
python -m rl_zoo3.enjoy --algo ppo --env PongNoFrameskip-v4 -f logs/
```
## Training (with the RL Zoo)
```
python -m rl_zoo3.train --algo ppo --env PongNoFrameskip-v4 -f logs/
# Upload the model and generate video (when possible)
python -m rl_zoo3.push_to_hub --algo ppo --env PongNoFrameskip-v4 -f logs/ -orga qgallouedec
```
## Hyperparameters
```python
OrderedDict([('batch_size', 256),
('clip_range', 'lin_0.1'),
('ent_coef', 0.01),
('env_wrapper',
['stable_baselines3.common.atari_wrappers.AtariWrapper']),
('frame_stack', 4),
('learning_rate', 'lin_2.5e-4'),
('n_envs', 8),
('n_epochs', 4),
('n_steps', 128),
('n_timesteps', 10000000.0),
('policy', 'CnnPolicy'),
('vf_coef', 0.5),
('normalize', False)])
```
|
DJSammy/bert-base-swedish-uncased_BotXO-ai
|
[
"pytorch",
"transformers"
] | null |
{
"architectures": null,
"model_type": null,
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 1 | null |
---
library_name: stable-baselines3
tags:
- SpaceInvadersNoFrameskip-v4
- deep-reinforcement-learning
- reinforcement-learning
- stable-baselines3
model-index:
- name: PPO
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: SpaceInvadersNoFrameskip-v4
type: SpaceInvadersNoFrameskip-v4
metrics:
- type: mean_reward
value: 1157.00 +/- 512.15
name: mean_reward
verified: false
---
# **PPO** Agent playing **SpaceInvadersNoFrameskip-v4**
This is a trained model of a **PPO** agent playing **SpaceInvadersNoFrameskip-v4**
using the [stable-baselines3 library](https://github.com/DLR-RM/stable-baselines3)
and the [RL Zoo](https://github.com/DLR-RM/rl-baselines3-zoo).
The RL Zoo is a training framework for Stable Baselines3
reinforcement learning agents,
with hyperparameter optimization and pre-trained agents included.
## Usage (with SB3 RL Zoo)
RL Zoo: https://github.com/DLR-RM/rl-baselines3-zoo<br/>
SB3: https://github.com/DLR-RM/stable-baselines3<br/>
SB3 Contrib: https://github.com/Stable-Baselines-Team/stable-baselines3-contrib
Install the RL Zoo (with SB3 and SB3-Contrib):
```bash
pip install rl_zoo3
```
```
# Download model and save it into the logs/ folder
python -m rl_zoo3.load_from_hub --algo ppo --env SpaceInvadersNoFrameskip-v4 -orga qgallouedec -f logs/
python -m rl_zoo3.enjoy --algo ppo --env SpaceInvadersNoFrameskip-v4 -f logs/
```
If you installed the RL Zoo3 via pip (`pip install rl_zoo3`), from anywhere you can do:
```
python -m rl_zoo3.load_from_hub --algo ppo --env SpaceInvadersNoFrameskip-v4 -orga qgallouedec -f logs/
python -m rl_zoo3.enjoy --algo ppo --env SpaceInvadersNoFrameskip-v4 -f logs/
```
## Training (with the RL Zoo)
```
python -m rl_zoo3.train --algo ppo --env SpaceInvadersNoFrameskip-v4 -f logs/
# Upload the model and generate video (when possible)
python -m rl_zoo3.push_to_hub --algo ppo --env SpaceInvadersNoFrameskip-v4 -f logs/ -orga qgallouedec
```
## Hyperparameters
```python
OrderedDict([('batch_size', 256),
('clip_range', 'lin_0.1'),
('ent_coef', 0.01),
('env_wrapper',
['stable_baselines3.common.atari_wrappers.AtariWrapper']),
('frame_stack', 4),
('learning_rate', 'lin_2.5e-4'),
('n_envs', 8),
('n_epochs', 4),
('n_steps', 128),
('n_timesteps', 10000000.0),
('policy', 'CnnPolicy'),
('vf_coef', 0.5),
('normalize', False)])
```
|
DJStomp/TestingSalvoNET
|
[
"transformers"
] | null |
{
"architectures": null,
"model_type": null,
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 1 | null |
---
library_name: stable-baselines3
tags:
- SpaceInvadersNoFrameskip-v4
- deep-reinforcement-learning
- reinforcement-learning
- stable-baselines3
model-index:
- name: PPO
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: SpaceInvadersNoFrameskip-v4
type: SpaceInvadersNoFrameskip-v4
metrics:
- type: mean_reward
value: 665.50 +/- 199.00
name: mean_reward
verified: false
---
# **PPO** Agent playing **SpaceInvadersNoFrameskip-v4**
This is a trained model of a **PPO** agent playing **SpaceInvadersNoFrameskip-v4**
using the [stable-baselines3 library](https://github.com/DLR-RM/stable-baselines3)
and the [RL Zoo](https://github.com/DLR-RM/rl-baselines3-zoo).
The RL Zoo is a training framework for Stable Baselines3
reinforcement learning agents,
with hyperparameter optimization and pre-trained agents included.
## Usage (with SB3 RL Zoo)
RL Zoo: https://github.com/DLR-RM/rl-baselines3-zoo<br/>
SB3: https://github.com/DLR-RM/stable-baselines3<br/>
SB3 Contrib: https://github.com/Stable-Baselines-Team/stable-baselines3-contrib
Install the RL Zoo (with SB3 and SB3-Contrib):
```bash
pip install rl_zoo3
```
```
# Download model and save it into the logs/ folder
python -m rl_zoo3.load_from_hub --algo ppo --env SpaceInvadersNoFrameskip-v4 -orga qgallouedec -f logs/
python -m rl_zoo3.enjoy --algo ppo --env SpaceInvadersNoFrameskip-v4 -f logs/
```
If you installed the RL Zoo3 via pip (`pip install rl_zoo3`), from anywhere you can do:
```
python -m rl_zoo3.load_from_hub --algo ppo --env SpaceInvadersNoFrameskip-v4 -orga qgallouedec -f logs/
python -m rl_zoo3.enjoy --algo ppo --env SpaceInvadersNoFrameskip-v4 -f logs/
```
## Training (with the RL Zoo)
```
python -m rl_zoo3.train --algo ppo --env SpaceInvadersNoFrameskip-v4 -f logs/
# Upload the model and generate video (when possible)
python -m rl_zoo3.push_to_hub --algo ppo --env SpaceInvadersNoFrameskip-v4 -f logs/ -orga qgallouedec
```
## Hyperparameters
```python
OrderedDict([('batch_size', 256),
('clip_range', 'lin_0.1'),
('ent_coef', 0.01),
('env_wrapper',
['stable_baselines3.common.atari_wrappers.AtariWrapper']),
('frame_stack', 4),
('learning_rate', 'lin_2.5e-4'),
('n_envs', 8),
('n_epochs', 4),
('n_steps', 128),
('n_timesteps', 10000000.0),
('policy', 'CnnPolicy'),
('vf_coef', 0.5),
('normalize', False)])
```
|
DKpro000/DialoGPT-small-harrypotter
|
[] | null |
{
"architectures": null,
"model_type": null,
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 0 | null |
---
library_name: stable-baselines3
tags:
- PongNoFrameskip-v4
- deep-reinforcement-learning
- reinforcement-learning
- stable-baselines3
model-index:
- name: PPO
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: PongNoFrameskip-v4
type: PongNoFrameskip-v4
metrics:
- type: mean_reward
value: 20.30 +/- 0.64
name: mean_reward
verified: false
---
# **PPO** Agent playing **PongNoFrameskip-v4**
This is a trained model of a **PPO** agent playing **PongNoFrameskip-v4**
using the [stable-baselines3 library](https://github.com/DLR-RM/stable-baselines3)
and the [RL Zoo](https://github.com/DLR-RM/rl-baselines3-zoo).
The RL Zoo is a training framework for Stable Baselines3
reinforcement learning agents,
with hyperparameter optimization and pre-trained agents included.
## Usage (with SB3 RL Zoo)
RL Zoo: https://github.com/DLR-RM/rl-baselines3-zoo<br/>
SB3: https://github.com/DLR-RM/stable-baselines3<br/>
SB3 Contrib: https://github.com/Stable-Baselines-Team/stable-baselines3-contrib
Install the RL Zoo (with SB3 and SB3-Contrib):
```bash
pip install rl_zoo3
```
```
# Download model and save it into the logs/ folder
python -m rl_zoo3.load_from_hub --algo ppo --env PongNoFrameskip-v4 -orga qgallouedec -f logs/
python -m rl_zoo3.enjoy --algo ppo --env PongNoFrameskip-v4 -f logs/
```
If you installed the RL Zoo3 via pip (`pip install rl_zoo3`), from anywhere you can do:
```
python -m rl_zoo3.load_from_hub --algo ppo --env PongNoFrameskip-v4 -orga qgallouedec -f logs/
python -m rl_zoo3.enjoy --algo ppo --env PongNoFrameskip-v4 -f logs/
```
## Training (with the RL Zoo)
```
python -m rl_zoo3.train --algo ppo --env PongNoFrameskip-v4 -f logs/
# Upload the model and generate video (when possible)
python -m rl_zoo3.push_to_hub --algo ppo --env PongNoFrameskip-v4 -f logs/ -orga qgallouedec
```
## Hyperparameters
```python
OrderedDict([('batch_size', 256),
('clip_range', 'lin_0.1'),
('ent_coef', 0.01),
('env_wrapper',
['stable_baselines3.common.atari_wrappers.AtariWrapper']),
('frame_stack', 4),
('learning_rate', 'lin_2.5e-4'),
('n_envs', 8),
('n_epochs', 4),
('n_steps', 128),
('n_timesteps', 10000000.0),
('policy', 'CnnPolicy'),
('vf_coef', 0.5),
('normalize', False)])
```
|
DSI/TweetBasedSA
|
[
"pytorch",
"bert",
"text-classification",
"transformers"
] |
text-classification
|
{
"architectures": [
"BertForSequenceClassification"
],
"model_type": "bert",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 29 | null |
---
library_name: stable-baselines3
tags:
- LunarLander-v2
- deep-reinforcement-learning
- reinforcement-learning
- stable-baselines3
model-index:
- name: PPO
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: LunarLander-v2
type: LunarLander-v2
metrics:
- type: mean_reward
value: 286.09 +/- 23.51
name: mean_reward
verified: false
---
# **PPO** Agent playing **LunarLander-v2**
This is a trained model of a **PPO** agent playing **LunarLander-v2**
using the [stable-baselines3 library](https://github.com/DLR-RM/stable-baselines3).
## Usage (with Stable-baselines3)
TODO: Add your code
```python
from stable_baselines3 import ...
from huggingface_sb3 import load_from_hub
...
```
|
DSI/human-directed-sentiment
|
[
"pytorch",
"bert",
"text-classification",
"transformers"
] |
text-classification
|
{
"architectures": [
"BertForSequenceClassification"
],
"model_type": "bert",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 26 | null |
---
tags:
- LunarLander-v2
- ppo
- deep-reinforcement-learning
- reinforcement-learning
- custom-implementation
- deep-rl-course
model-index:
- name: PPO
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: LunarLander-v2
type: LunarLander-v2
metrics:
- type: mean_reward
value: -132.72 +/- 85.10
name: mean_reward
verified: false
---
# PPO Agent Playing LunarLander-v2
This is a trained model of a PPO agent playing LunarLander-v2.
# Hyperparameters
```python
{'exp_name': 'ppo'
'seed': 1
'torch_deterministic': True
'cuda': True
'track': False
'wandb_project_name': 'cleanRL'
'wandb_entity': None
'capture_video': False
'env_id': 'LunarLander-v2'
'total_timesteps': 50000
'learning_rate': 0.00025
'num_envs': 4
'num_steps': 128
'anneal_lr': True
'gae': True
'gamma': 0.99
'gae_lambda': 0.95
'num_minibatches': 4
'update_epochs': 4
'norm_adv': True
'clip_coef': 0.2
'clip_vloss': True
'ent_coef': 0.01
'vf_coef': 0.5
'max_grad_norm': 0.5
'target_kl': None
'repo_id': 'hectorjelly/LunarLander-v2'
'batch_size': 512
'minibatch_size': 128}
```
|
DTAI-KULeuven/mbert-corona-tweets-belgium-curfew-support
|
[
"pytorch",
"jax",
"bert",
"text-classification",
"multilingual",
"nl",
"fr",
"en",
"arxiv:2104.09947",
"transformers",
"Tweets",
"Sentiment analysis"
] |
text-classification
|
{
"architectures": [
"BertForSequenceClassification"
],
"model_type": "bert",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 29 | null |
---
library_name: stable-baselines3
tags:
- SpaceInvadersNoFrameskip-v4
- deep-reinforcement-learning
- reinforcement-learning
- stable-baselines3
model-index:
- name: PPO
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: SpaceInvadersNoFrameskip-v4
type: SpaceInvadersNoFrameskip-v4
metrics:
- type: mean_reward
value: 1124.00 +/- 512.83
name: mean_reward
verified: false
---
# **PPO** Agent playing **SpaceInvadersNoFrameskip-v4**
This is a trained model of a **PPO** agent playing **SpaceInvadersNoFrameskip-v4**
using the [stable-baselines3 library](https://github.com/DLR-RM/stable-baselines3)
and the [RL Zoo](https://github.com/DLR-RM/rl-baselines3-zoo).
The RL Zoo is a training framework for Stable Baselines3
reinforcement learning agents,
with hyperparameter optimization and pre-trained agents included.
## Usage (with SB3 RL Zoo)
RL Zoo: https://github.com/DLR-RM/rl-baselines3-zoo<br/>
SB3: https://github.com/DLR-RM/stable-baselines3<br/>
SB3 Contrib: https://github.com/Stable-Baselines-Team/stable-baselines3-contrib
Install the RL Zoo (with SB3 and SB3-Contrib):
```bash
pip install rl_zoo3
```
```
# Download model and save it into the logs/ folder
python -m rl_zoo3.load_from_hub --algo ppo --env SpaceInvadersNoFrameskip-v4 -orga qgallouedec -f logs/
python -m rl_zoo3.enjoy --algo ppo --env SpaceInvadersNoFrameskip-v4 -f logs/
```
If you installed the RL Zoo3 via pip (`pip install rl_zoo3`), from anywhere you can do:
```
python -m rl_zoo3.load_from_hub --algo ppo --env SpaceInvadersNoFrameskip-v4 -orga qgallouedec -f logs/
python -m rl_zoo3.enjoy --algo ppo --env SpaceInvadersNoFrameskip-v4 -f logs/
```
## Training (with the RL Zoo)
```
python -m rl_zoo3.train --algo ppo --env SpaceInvadersNoFrameskip-v4 -f logs/
# Upload the model and generate video (when possible)
python -m rl_zoo3.push_to_hub --algo ppo --env SpaceInvadersNoFrameskip-v4 -f logs/ -orga qgallouedec
```
## Hyperparameters
```python
OrderedDict([('batch_size', 256),
('clip_range', 'lin_0.1'),
('ent_coef', 0.01),
('env_wrapper',
['stable_baselines3.common.atari_wrappers.AtariWrapper']),
('frame_stack', 4),
('learning_rate', 'lin_2.5e-4'),
('n_envs', 8),
('n_epochs', 4),
('n_steps', 128),
('n_timesteps', 10000000.0),
('policy', 'CnnPolicy'),
('vf_coef', 0.5),
('normalize', False)])
```
|
DTAI-KULeuven/mbert-corona-tweets-belgium-topics
|
[
"pytorch",
"jax",
"bert",
"text-classification",
"multilingual",
"nl",
"fr",
"en",
"arxiv:2104.09947",
"transformers",
"Dutch",
"French",
"English",
"Tweets",
"Topic classification"
] |
text-classification
|
{
"architectures": [
"BertForSequenceClassification"
],
"model_type": "bert",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 167 | null |
# Vocabulary Trimmed [mbart-large-cc25-trimmed-fr](https://huggingface.co/mbart-large-cc25-trimmed-fr): `asahi417/mbart-large-cc25-trimmed-fr`
This model is a trimmed version of [mbart-large-cc25-trimmed-fr](https://huggingface.co/mbart-large-cc25-trimmed-fr) by [`vocabtrimmer`](https://github.com/asahi417/lm-vocab-trimmer), a tool for trimming vocabulary of language models to compress the model size.
Following table shows a summary of the trimming process.
| | mbart-large-cc25-trimmed-fr | asahi417/mbart-large-cc25-trimmed-fr |
|:---------------------------|:------------------------------|:---------------------------------------|
| parameter_size_full | 610,851,840 | 398,106,624 |
| parameter_size_embedding | 512,055,296 | 86,564,864 |
| vocab_size | 250,027 | 42,268 |
| compression_rate_full | 100.0 | 65.17 |
| compression_rate_embedding | 100.0 | 16.91 |
|
DTAI-KULeuven/robbertje-1-gb-bort
|
[
"pytorch",
"roberta",
"fill-mask",
"nl",
"dataset:oscar",
"dataset:oscar (NL)",
"dataset:dbrd",
"dataset:lassy-ud",
"dataset:europarl-mono",
"dataset:conll2002",
"arxiv:2101.05716",
"transformers",
"Dutch",
"Flemish",
"RoBERTa",
"RobBERT",
"RobBERTje",
"license:mit",
"autotrain_compatible"
] |
fill-mask
|
{
"architectures": [
"RobertaForMaskedLM"
],
"model_type": "roberta",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 6 | null |
---
library_name: stable-baselines3
tags:
- SpaceInvadersNoFrameskip-v4
- deep-reinforcement-learning
- reinforcement-learning
- stable-baselines3
model-index:
- name: PPO
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: SpaceInvadersNoFrameskip-v4
type: SpaceInvadersNoFrameskip-v4
metrics:
- type: mean_reward
value: 885.50 +/- 315.23
name: mean_reward
verified: false
---
# **PPO** Agent playing **SpaceInvadersNoFrameskip-v4**
This is a trained model of a **PPO** agent playing **SpaceInvadersNoFrameskip-v4**
using the [stable-baselines3 library](https://github.com/DLR-RM/stable-baselines3)
and the [RL Zoo](https://github.com/DLR-RM/rl-baselines3-zoo).
The RL Zoo is a training framework for Stable Baselines3
reinforcement learning agents,
with hyperparameter optimization and pre-trained agents included.
## Usage (with SB3 RL Zoo)
RL Zoo: https://github.com/DLR-RM/rl-baselines3-zoo<br/>
SB3: https://github.com/DLR-RM/stable-baselines3<br/>
SB3 Contrib: https://github.com/Stable-Baselines-Team/stable-baselines3-contrib
Install the RL Zoo (with SB3 and SB3-Contrib):
```bash
pip install rl_zoo3
```
```
# Download model and save it into the logs/ folder
python -m rl_zoo3.load_from_hub --algo ppo --env SpaceInvadersNoFrameskip-v4 -orga qgallouedec -f logs/
python -m rl_zoo3.enjoy --algo ppo --env SpaceInvadersNoFrameskip-v4 -f logs/
```
If you installed the RL Zoo3 via pip (`pip install rl_zoo3`), from anywhere you can do:
```
python -m rl_zoo3.load_from_hub --algo ppo --env SpaceInvadersNoFrameskip-v4 -orga qgallouedec -f logs/
python -m rl_zoo3.enjoy --algo ppo --env SpaceInvadersNoFrameskip-v4 -f logs/
```
## Training (with the RL Zoo)
```
python -m rl_zoo3.train --algo ppo --env SpaceInvadersNoFrameskip-v4 -f logs/
# Upload the model and generate video (when possible)
python -m rl_zoo3.push_to_hub --algo ppo --env SpaceInvadersNoFrameskip-v4 -f logs/ -orga qgallouedec
```
## Hyperparameters
```python
OrderedDict([('batch_size', 256),
('clip_range', 'lin_0.1'),
('ent_coef', 0.01),
('env_wrapper',
['stable_baselines3.common.atari_wrappers.AtariWrapper']),
('frame_stack', 4),
('learning_rate', 'lin_2.5e-4'),
('n_envs', 8),
('n_epochs', 4),
('n_steps', 128),
('n_timesteps', 10000000.0),
('policy', 'CnnPolicy'),
('vf_coef', 0.5),
('normalize', False)])
```
|
DTAI-KULeuven/robbertje-1-gb-merged
|
[
"pytorch",
"roberta",
"fill-mask",
"nl",
"dataset:oscar",
"dataset:oscar (NL)",
"dataset:dbrd",
"dataset:lassy-ud",
"dataset:europarl-mono",
"dataset:conll2002",
"arxiv:2101.05716",
"transformers",
"Dutch",
"Flemish",
"RoBERTa",
"RobBERT",
"RobBERTje",
"license:mit",
"autotrain_compatible"
] |
fill-mask
|
{
"architectures": [
"RobertaForMaskedLM"
],
"model_type": "roberta",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 1 | null |
---
library_name: stable-baselines3
tags:
- EnduroNoFrameskip-v4
- deep-reinforcement-learning
- reinforcement-learning
- stable-baselines3
model-index:
- name: PPO
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: EnduroNoFrameskip-v4
type: EnduroNoFrameskip-v4
metrics:
- type: mean_reward
value: 591.50 +/- 148.66
name: mean_reward
verified: false
---
# **PPO** Agent playing **EnduroNoFrameskip-v4**
This is a trained model of a **PPO** agent playing **EnduroNoFrameskip-v4**
using the [stable-baselines3 library](https://github.com/DLR-RM/stable-baselines3)
and the [RL Zoo](https://github.com/DLR-RM/rl-baselines3-zoo).
The RL Zoo is a training framework for Stable Baselines3
reinforcement learning agents,
with hyperparameter optimization and pre-trained agents included.
## Usage (with SB3 RL Zoo)
RL Zoo: https://github.com/DLR-RM/rl-baselines3-zoo<br/>
SB3: https://github.com/DLR-RM/stable-baselines3<br/>
SB3 Contrib: https://github.com/Stable-Baselines-Team/stable-baselines3-contrib
Install the RL Zoo (with SB3 and SB3-Contrib):
```bash
pip install rl_zoo3
```
```
# Download model and save it into the logs/ folder
python -m rl_zoo3.load_from_hub --algo ppo --env EnduroNoFrameskip-v4 -orga qgallouedec -f logs/
python -m rl_zoo3.enjoy --algo ppo --env EnduroNoFrameskip-v4 -f logs/
```
If you installed the RL Zoo3 via pip (`pip install rl_zoo3`), from anywhere you can do:
```
python -m rl_zoo3.load_from_hub --algo ppo --env EnduroNoFrameskip-v4 -orga qgallouedec -f logs/
python -m rl_zoo3.enjoy --algo ppo --env EnduroNoFrameskip-v4 -f logs/
```
## Training (with the RL Zoo)
```
python -m rl_zoo3.train --algo ppo --env EnduroNoFrameskip-v4 -f logs/
# Upload the model and generate video (when possible)
python -m rl_zoo3.push_to_hub --algo ppo --env EnduroNoFrameskip-v4 -f logs/ -orga qgallouedec
```
## Hyperparameters
```python
OrderedDict([('batch_size', 256),
('clip_range', 'lin_0.1'),
('ent_coef', 0.01),
('env_wrapper',
['stable_baselines3.common.atari_wrappers.AtariWrapper']),
('frame_stack', 4),
('learning_rate', 'lin_2.5e-4'),
('n_envs', 8),
('n_epochs', 4),
('n_steps', 128),
('n_timesteps', 10000000.0),
('policy', 'CnnPolicy'),
('vf_coef', 0.5),
('normalize', False)])
```
|
DTAI-KULeuven/robbertje-1-gb-shuffled
|
[
"pytorch",
"roberta",
"fill-mask",
"nl",
"dataset:oscar",
"dataset:oscar (NL)",
"dataset:dbrd",
"dataset:lassy-ud",
"dataset:europarl-mono",
"dataset:conll2002",
"arxiv:2101.05716",
"transformers",
"Dutch",
"Flemish",
"RoBERTa",
"RobBERT",
"RobBERTje",
"license:mit",
"autotrain_compatible"
] |
fill-mask
|
{
"architectures": [
"RobertaForMaskedLM"
],
"model_type": "roberta",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 7 | null |
# Vocabulary Trimmed [facebook/mbart-large-cc25](https://huggingface.co/facebook/mbart-large-cc25): `asahi417/mbart-large-cc25-trimmed-it`
This model is a trimmed version of [facebook/mbart-large-cc25](https://huggingface.co/facebook/mbart-large-cc25) by [`vocabtrimmer`](https://github.com/asahi417/lm-vocab-trimmer), a tool for trimming vocabulary of language models to compress the model size.
Following table shows a summary of the trimming process.
| | facebook/mbart-large-cc25 | asahi417/mbart-large-cc25-trimmed-it |
|:---------------------------|:----------------------------|:---------------------------------------|
| parameter_size_full | 610,851,840 | 476,043,264 |
| parameter_size_embedding | 512,055,296 | 242,438,144 |
| vocab_size | 250,027 | 118,378 |
| compression_rate_full | 100.0 | 77.93 |
| compression_rate_embedding | 100.0 | 47.35 |
|
alexandrainst/da-emotion-classification-base
|
[
"pytorch",
"tf",
"bert",
"text-classification",
"da",
"transformers",
"license:cc-by-sa-4.0"
] |
text-classification
|
{
"architectures": [
"BertForSequenceClassification"
],
"model_type": "bert",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 837 | null |
---
tags:
- CartPole-v1
- reinforce
- reinforcement-learning
- custom-implementation
- deep-rl-class
model-index:
- name: CartPole
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: CartPole-v1
type: CartPole-v1
metrics:
- type: mean_reward
value: 500.00 +/- 0.00
name: mean_reward
verified: false
---
# **Reinforce** Agent playing **CartPole-v1**
This is a trained model of a **Reinforce** agent playing **CartPole-v1** .
To learn to use this model and train yours check Unit 4 of the Deep Reinforcement Learning Course: https://huggingface.co/deep-rl-course/unit4/introduction
|
alexandrainst/da-hatespeech-classification-base
|
[
"pytorch",
"tf",
"safetensors",
"bert",
"text-classification",
"da",
"transformers",
"license:cc-by-sa-4.0"
] |
text-classification
|
{
"architectures": [
"BertForSequenceClassification"
],
"model_type": "bert",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 866 | null |
---
library_name: stable-baselines3
tags:
- SpaceInvadersNoFrameskip-v4
- deep-reinforcement-learning
- reinforcement-learning
- stable-baselines3
model-index:
- name: DQN
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: SpaceInvadersNoFrameskip-v4
type: SpaceInvadersNoFrameskip-v4
metrics:
- type: mean_reward
value: 206.00 +/- 89.88
name: mean_reward
verified: false
---
# **DQN** Agent playing **SpaceInvadersNoFrameskip-v4**
This is a trained model of a **DQN** agent playing **SpaceInvadersNoFrameskip-v4**
using the [stable-baselines3 library](https://github.com/DLR-RM/stable-baselines3)
and the [RL Zoo](https://github.com/DLR-RM/rl-baselines3-zoo).
The RL Zoo is a training framework for Stable Baselines3
reinforcement learning agents,
with hyperparameter optimization and pre-trained agents included.
## Usage (with SB3 RL Zoo)
RL Zoo: https://github.com/DLR-RM/rl-baselines3-zoo<br/>
SB3: https://github.com/DLR-RM/stable-baselines3<br/>
SB3 Contrib: https://github.com/Stable-Baselines-Team/stable-baselines3-contrib
Install the RL Zoo (with SB3 and SB3-Contrib):
```bash
pip install rl_zoo3
```
```
# Download model and save it into the logs/ folder
python -m rl_zoo3.load_from_hub --algo dqn --env SpaceInvadersNoFrameskip-v4 -orga verderis -f logs/
python -m rl_zoo3.enjoy --algo dqn --env SpaceInvadersNoFrameskip-v4 -f logs/
```
If you installed the RL Zoo3 via pip (`pip install rl_zoo3`), from anywhere you can do:
```
python -m rl_zoo3.load_from_hub --algo dqn --env SpaceInvadersNoFrameskip-v4 -orga verderis -f logs/
python -m rl_zoo3.enjoy --algo dqn --env SpaceInvadersNoFrameskip-v4 -f logs/
```
## Training (with the RL Zoo)
```
python -m rl_zoo3.train --algo dqn --env SpaceInvadersNoFrameskip-v4 -f logs/
# Upload the model and generate video (when possible)
python -m rl_zoo3.push_to_hub --algo dqn --env SpaceInvadersNoFrameskip-v4 -f logs/ -orga verderis
```
## Hyperparameters
```python
OrderedDict([('batch_size', 32),
('buffer_size', 10000),
('env_wrapper',
['stable_baselines3.common.atari_wrappers.AtariWrapper']),
('exploration_final_eps', 0.01),
('exploration_fraction', 0.1),
('frame_stack', 4),
('gradient_steps', 1),
('learning_rate', 0.0001),
('learning_starts', 10000),
('n_timesteps', 100000.0),
('optimize_memory_usage', False),
('policy', 'CnnPolicy'),
('target_update_interval', 1000),
('train_freq', 4),
('normalize', False)])
```
|
alexandrainst/da-hatespeech-detection-base
|
[
"pytorch",
"tf",
"safetensors",
"bert",
"text-classification",
"da",
"transformers",
"license:cc-by-sa-4.0"
] |
text-classification
|
{
"architectures": [
"BertForSequenceClassification"
],
"model_type": "bert",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 1,719 | null |
---
library_name: stable-baselines3
tags:
- SpaceInvadersNoFrameskip-v4
- deep-reinforcement-learning
- reinforcement-learning
- stable-baselines3
model-index:
- name: DQN
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: SpaceInvadersNoFrameskip-v4
type: SpaceInvadersNoFrameskip-v4
metrics:
- type: mean_reward
value: 572.50 +/- 81.83
name: mean_reward
verified: false
---
# **DQN** Agent playing **SpaceInvadersNoFrameskip-v4**
This is a trained model of a **DQN** agent playing **SpaceInvadersNoFrameskip-v4**
using the [stable-baselines3 library](https://github.com/DLR-RM/stable-baselines3)
and the [RL Zoo](https://github.com/DLR-RM/rl-baselines3-zoo).
The RL Zoo is a training framework for Stable Baselines3
reinforcement learning agents,
with hyperparameter optimization and pre-trained agents included.
## Training details
This might seem like cheating but ...
it doesn't feel right to burn 90 minutes of GPU time (and tying up a colab machine) to reporduce a model that is already available on the hub ...
so I've borrowed a trained model and continuted training for just a few steps.
I'm wondering if dqn training could be made faster/more efficient if we train the CNN in a semi-supervised style rather than starting with random weights ...
i.e given the previous 4 frames, can the model predict the next frame ...
## Usage (with SB3 RL Zoo)
RL Zoo: https://github.com/DLR-RM/rl-baselines3-zoo<br/>
SB3: https://github.com/DLR-RM/stable-baselines3<br/>
SB3 Contrib: https://github.com/Stable-Baselines-Team/stable-baselines3-contrib
Install the RL Zoo (with SB3 and SB3-Contrib):
```bash
pip install rl_zoo3
```
```
# Download model and save it into the logs/ folder
python -m rl_zoo3.load_from_hub --algo dqn --env SpaceInvadersNoFrameskip-v4 -orga pete88b -f logs/
python -m rl_zoo3.enjoy --algo dqn --env SpaceInvadersNoFrameskip-v4 -f logs/
```
If you installed the RL Zoo3 via pip (`pip install rl_zoo3`), from anywhere you can do:
```
python -m rl_zoo3.load_from_hub --algo dqn --env SpaceInvadersNoFrameskip-v4 -orga pete88b -f logs/
python -m rl_zoo3.enjoy --algo dqn --env SpaceInvadersNoFrameskip-v4 -f logs/
```
## Training (with the RL Zoo)
```
python -m rl_zoo3.train --algo dqn --env SpaceInvadersNoFrameskip-v4 -f logs/
# Upload the model and generate video (when possible)
python -m rl_zoo3.push_to_hub --algo dqn --env SpaceInvadersNoFrameskip-v4 -f logs/ -orga pete88b
```
## Hyperparameters
```python
OrderedDict([('batch_size', 32),
('buffer_size', 100000),
('env_wrapper',
['stable_baselines3.common.atari_wrappers.AtariWrapper']),
('exploration_final_eps', 0.01),
('exploration_fraction', 0.1),
('frame_stack', 4),
('gradient_steps', 1),
('learning_rate', 0.0001),
('learning_starts', 100000),
('n_timesteps', 10000000.0),
('optimize_memory_usage', False),
('policy', 'CnnPolicy'),
('target_update_interval', 1000),
('train_freq', 4),
('normalize', False)])
```
|
alexandrainst/da-hatespeech-detection-small
|
[
"pytorch",
"electra",
"text-classification",
"da",
"transformers",
"license:cc-by-4.0"
] |
text-classification
|
{
"architectures": [
"ElectraForSequenceClassification"
],
"model_type": "electra",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 1,506 | null |
# Vocabulary Trimmed [facebook/mbart-large-cc25](https://huggingface.co/facebook/mbart-large-cc25): `asahi417/mbart-large-cc25-trimmed-ko`
This model is a trimmed version of [facebook/mbart-large-cc25](https://huggingface.co/facebook/mbart-large-cc25) by [`vocabtrimmer`](https://github.com/asahi417/lm-vocab-trimmer), a tool for trimming vocabulary of language models to compress the model size.
Following table shows a summary of the trimming process.
| | facebook/mbart-large-cc25 | asahi417/mbart-large-cc25-trimmed-ko |
|:---------------------------|:----------------------------|:---------------------------------------|
| parameter_size_full | 610,851,840 | 371,345,408 |
| parameter_size_embedding | 512,055,296 | 33,042,432 |
| vocab_size | 250,027 | 16,134 |
| compression_rate_full | 100.0 | 60.79 |
| compression_rate_embedding | 100.0 | 6.45 |
|
Danbi/distilroberta-base-finetuned-wikitext2
|
[] | null |
{
"architectures": null,
"model_type": null,
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 0 | null |
---
language: en
license: apache-2.0
library_name: diffusers
tags: []
datasets: imagefolder
metrics: []
---
<!-- This model card has been generated automatically according to the information the training script had access to. You
should probably proofread and complete it, then remove this comment. -->
# ddpm-pokemons-128_300_epochs_1000_steps_final
## Model description
This diffusion model is trained with the [🤗 Diffusers](https://github.com/huggingface/diffusers) library
on the `imagefolder` dataset.
## Intended uses & limitations
#### How to use
```python
# TODO: add an example code snippet for running this diffusion pipeline
```
#### Limitations and bias
[TODO: provide examples of latent issues and potential remediations]
## Training data
[TODO: describe the data used to train the model]
### Training hyperparameters
The following hyperparameters were used during training:
- learning_rate: 0.0001
- train_batch_size: 11
- eval_batch_size: 12
- gradient_accumulation_steps: 1
- optimizer: AdamW with betas=(None, None), weight_decay=None and epsilon=None
- lr_scheduler: None
- lr_warmup_steps: 500
- ema_inv_gamma: None
- ema_inv_gamma: None
- ema_inv_gamma: None
- mixed_precision: fp16
### Training results
📈 [TensorBoard logs](https://huggingface.co/Yagorka/ddpm-pokemons-128_300_epochs_1000_steps_final/tensorboard?#scalars)
|
Dandara/bertimbau-socioambiental
|
[
"pytorch",
"bert",
"text-classification",
"transformers"
] |
text-classification
|
{
"architectures": [
"BertForSequenceClassification"
],
"model_type": "bert",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 27 | null |
---
library_name: stable-baselines3
tags:
- PandaReachDense-v2
- deep-reinforcement-learning
- reinforcement-learning
- stable-baselines3
model-index:
- name: A2C
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: PandaReachDense-v2
type: PandaReachDense-v2
metrics:
- type: mean_reward
value: -4.65 +/- 0.63
name: mean_reward
verified: false
---
# **A2C** Agent playing **PandaReachDense-v2**
This is a trained model of a **A2C** agent playing **PandaReachDense-v2**
using the [stable-baselines3 library](https://github.com/DLR-RM/stable-baselines3).
## Usage (with Stable-baselines3)
TODO: Add your code
```python
from stable_baselines3 import ...
from huggingface_sb3 import load_from_hub
...
```
|
Dave/twomad-model
|
[] | null |
{
"architectures": null,
"model_type": null,
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 0 | null |
---
library_name: stable-baselines3
tags:
- AntBulletEnv-v0
- deep-reinforcement-learning
- reinforcement-learning
- stable-baselines3
model-index:
- name: A2C
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: AntBulletEnv-v0
type: AntBulletEnv-v0
metrics:
- type: mean_reward
value: 1164.34 +/- 101.79
name: mean_reward
verified: false
---
# **A2C** Agent playing **AntBulletEnv-v0**
This is a trained model of a **A2C** agent playing **AntBulletEnv-v0**
using the [stable-baselines3 library](https://github.com/DLR-RM/stable-baselines3).
## Usage (with Stable-baselines3)
TODO: Add your code
```python
from stable_baselines3 import ...
from huggingface_sb3 import load_from_hub
...
```
|
Davlan/bert-base-multilingual-cased-finetuned-kinyarwanda
|
[
"pytorch",
"bert",
"fill-mask",
"transformers",
"autotrain_compatible"
] |
fill-mask
|
{
"architectures": [
"BertForMaskedLM"
],
"model_type": "bert",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 27 | null |
---
license: apache-2.0
datasets:
- hieunguyen1053/binhvq-news-corpus
language:
- vi
library_name: transformers
pipeline_tag: fill-mask
widget:
- text: "tôi là <mask> viên trường đại học tôn đức thắng"
example_title: "Example 1"
---
|
Davlan/bert-base-multilingual-cased-finetuned-luganda
|
[
"pytorch",
"bert",
"fill-mask",
"transformers",
"autotrain_compatible"
] |
fill-mask
|
{
"architectures": [
"BertForMaskedLM"
],
"model_type": "bert",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 16 | null |
---
library_name: stable-baselines3
tags:
- FrozenLake-v1
- deep-reinforcement-learning
- reinforcement-learning
- stable-baselines3
model-index:
- name: DQN
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: FrozenLake-v1
type: FrozenLake-v1
metrics:
- type: mean_reward
value: 0.90 +/- 0.30
name: mean_reward
verified: false
---
# **DQN** Agent playing **FrozenLake-v1**
This is a trained model of a **DQN** agent playing **FrozenLake-v1**
using the [stable-baselines3 library](https://github.com/DLR-RM/stable-baselines3).
## Usage (with Stable-baselines3)
TODO: Add your code
```python
from stable_baselines3 import ...
from huggingface_sb3 import load_from_hub
...
```
|
Davlan/mt5-small-pcm-en
|
[
"pytorch",
"mt5",
"text2text-generation",
"transformers",
"autotrain_compatible"
] |
text2text-generation
|
{
"architectures": [
"MT5ForConditionalGeneration"
],
"model_type": "mt5",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 9 | null |
---
library_name: stable-baselines3
tags:
- FrozenLake-v1
- deep-reinforcement-learning
- reinforcement-learning
- stable-baselines3
model-index:
- name: PPO
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: FrozenLake-v1
type: FrozenLake-v1
metrics:
- type: mean_reward
value: 0.70 +/- 0.46
name: mean_reward
verified: false
---
# **PPO** Agent playing **FrozenLake-v1**
This is a trained model of a **PPO** agent playing **FrozenLake-v1**
using the [stable-baselines3 library](https://github.com/DLR-RM/stable-baselines3).
## Usage (with Stable-baselines3)
TODO: Add your code
```python
from stable_baselines3 import ...
from huggingface_sb3 import load_from_hub
...
```
|
Davlan/mt5_base_yor_eng_mt
|
[
"pytorch",
"mt5",
"text2text-generation",
"arxiv:2103.08647",
"transformers",
"autotrain_compatible"
] |
text2text-generation
|
{
"architectures": [
"MT5ForConditionalGeneration"
],
"model_type": "mt5",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 8 | null |
---
library_name: stable-baselines3
tags:
- PandaReachDense-v2
- deep-reinforcement-learning
- reinforcement-learning
- stable-baselines3
model-index:
- name: A2C
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: PandaReachDense-v2
type: PandaReachDense-v2
metrics:
- type: mean_reward
value: -1.41 +/- 0.46
name: mean_reward
verified: false
---
# **A2C** Agent playing **PandaReachDense-v2**
This is a trained model of a **A2C** agent playing **PandaReachDense-v2**
using the [stable-baselines3 library](https://github.com/DLR-RM/stable-baselines3).
## Usage (with Stable-baselines3)
TODO: Add your code
```python
from stable_baselines3 import ...
from huggingface_sb3 import load_from_hub
...
```
|
Davlan/xlm-roberta-base-finetuned-amharic
|
[
"pytorch",
"xlm-roberta",
"fill-mask",
"transformers",
"autotrain_compatible"
] |
fill-mask
|
{
"architectures": [
"XLMRobertaForMaskedLM"
],
"model_type": "xlm-roberta",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 401 | null |
---
language:
- ar
---
The QARiB-Emotion-300k (QE3) is a QARiB language model that was further pre-trained for 300k training steps and roughly 28 epochs using the emotion tweets dataset (roughly 1.2 million tweets).
|
Davlan/xlm-roberta-base-finetuned-english
|
[
"pytorch",
"xlm-roberta",
"fill-mask",
"transformers",
"license:apache-2.0",
"autotrain_compatible"
] |
fill-mask
|
{
"architectures": [
"XLMRobertaForMaskedLM"
],
"model_type": "xlm-roberta",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 5 | null |
---
tags:
- autotrain
- vision
- image-classification
datasets:
- hg2001/autotrain-data-animals-vs-humans2
widget:
- src: https://huggingface.co/datasets/mishig/sample_images/resolve/main/tiger.jpg
example_title: Tiger
- src: https://huggingface.co/datasets/mishig/sample_images/resolve/main/teapot.jpg
example_title: Teapot
- src: https://huggingface.co/datasets/mishig/sample_images/resolve/main/palace.jpg
example_title: Palace
co2_eq_emissions:
emissions: 1.5958667599075285
---
# Model Trained Using AutoTrain
- Problem type: Binary Classification
- Model ID: 37846100283
- CO2 Emissions (in grams): 1.5959
## Validation Metrics
- Loss: 0.001
- Accuracy: 1.000
- Precision: 1.000
- Recall: 1.000
- AUC: 1.000
- F1: 1.000
|
Davlan/xlm-roberta-base-finetuned-naija
|
[
"pytorch",
"xlm-roberta",
"fill-mask",
"transformers",
"autotrain_compatible"
] |
fill-mask
|
{
"architectures": [
"XLMRobertaForMaskedLM"
],
"model_type": "xlm-roberta",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 1 | null |
---
library_name: sample-factory
tags:
- deep-reinforcement-learning
- reinforcement-learning
- sample-factory
model-index:
- name: APPO
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: doom_health_gathering_supreme
type: doom_health_gathering_supreme
metrics:
- type: mean_reward
value: 10.75 +/- 5.67
name: mean_reward
verified: false
---
A(n) **APPO** model trained on the **doom_health_gathering_supreme** environment.
This model was trained using Sample-Factory 2.0: https://github.com/alex-petrenko/sample-factory.
Documentation for how to use Sample-Factory can be found at https://www.samplefactory.dev/
## Downloading the model
After installing Sample-Factory, download the model with:
```
python -m sample_factory.huggingface.load_from_hub -r JYC333/rl_course_vizdoom_health_gathering_supreme
```
## Using the model
To run the model after download, use the `enjoy` script corresponding to this environment:
```
python -m .usr.local.lib.python3.8.dist-packages.ipykernel_launcher --algo=APPO --env=doom_health_gathering_supreme --train_dir=./train_dir --experiment=rl_course_vizdoom_health_gathering_supreme
```
You can also upload models to the Hugging Face Hub using the same script with the `--push_to_hub` flag.
See https://www.samplefactory.dev/10-huggingface/huggingface/ for more details
## Training with this model
To continue training with this model, use the `train` script corresponding to this environment:
```
python -m .usr.local.lib.python3.8.dist-packages.ipykernel_launcher --algo=APPO --env=doom_health_gathering_supreme --train_dir=./train_dir --experiment=rl_course_vizdoom_health_gathering_supreme --restart_behavior=resume --train_for_env_steps=10000000000
```
Note, you may have to adjust `--train_for_env_steps` to a suitably high number as the experiment will resume at the number of steps it concluded at.
|
Davlan/xlm-roberta-base-finetuned-somali
|
[
"pytorch",
"xlm-roberta",
"fill-mask",
"transformers",
"license:apache-2.0",
"autotrain_compatible"
] |
fill-mask
|
{
"architectures": [
"XLMRobertaForMaskedLM"
],
"model_type": "xlm-roberta",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 8 | null |
---
library_name: stable-baselines3
tags:
- PandaReachDense-v2
- deep-reinforcement-learning
- reinforcement-learning
- stable-baselines3
model-index:
- name: A2C
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: PandaReachDense-v2
type: PandaReachDense-v2
metrics:
- type: mean_reward
value: -2.00 +/- 0.45
name: mean_reward
verified: false
---
# **A2C** Agent playing **PandaReachDense-v2**
This is a trained model of a **A2C** agent playing **PandaReachDense-v2**
using the [stable-baselines3 library](https://github.com/DLR-RM/stable-baselines3).
## Usage (with Stable-baselines3)
TODO: Add your code
```python
from stable_baselines3 import ...
from huggingface_sb3 import load_from_hub
...
```
|
Davlan/xlm-roberta-base-finetuned-wolof
|
[
"pytorch",
"xlm-roberta",
"fill-mask",
"transformers",
"autotrain_compatible"
] |
fill-mask
|
{
"architectures": [
"XLMRobertaForMaskedLM"
],
"model_type": "xlm-roberta",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 3 | null |
---
tags:
- autotrain
- vision
- image-classification
datasets:
- hg2001/autotrain-data-male-vs-femalee
widget:
- src: https://huggingface.co/datasets/mishig/sample_images/resolve/main/tiger.jpg
example_title: Tiger
- src: https://huggingface.co/datasets/mishig/sample_images/resolve/main/teapot.jpg
example_title: Teapot
- src: https://huggingface.co/datasets/mishig/sample_images/resolve/main/palace.jpg
example_title: Palace
co2_eq_emissions:
emissions: 0.0034341761338042994
---
# Model Trained Using AutoTrain
- Problem type: Binary Classification
- Model ID: 37851100302
- CO2 Emissions (in grams): 0.0034
## Validation Metrics
- Loss: 0.060
- Accuracy: 0.979
- Precision: 0.960
- Recall: 1.000
- AUC: 1.000
- F1: 0.980
|
Dawn576/Dawn
|
[] | null |
{
"architectures": null,
"model_type": null,
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 0 | 2023-02-27T22:25:22Z |
---
tags:
- StarpilotHard-v0
- deep-reinforcement-learning
- reinforcement-learning
- custom-implementation
library_name: cleanrl
model-index:
- name: PPO
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: StarpilotHard-v0
type: StarpilotHard-v0
metrics:
- type: mean_reward
value: 0.10 +/- 0.30
name: mean_reward
verified: false
---
# (CleanRL) **PPO** Agent Playing **StarpilotHard-v0**
This is a trained model of a PPO agent playing StarpilotHard-v0.
The model was trained by using [CleanRL](https://github.com/vwxyzjn/cleanrl) and the most up-to-date training code can be
found [here](https://github.com/vwxyzjn/cleanrl/blob/master/cleanrl/cleanba_ppo_envpool_procgen.py).
## Get Started
To use this model, please install the `cleanrl` package with the following command:
```
pip install "cleanrl[jax,envpool,atari]"
python -m cleanrl_utils.enjoy --exp-name cleanba_ppo_envpool_procgen --env-id StarpilotHard-v0
```
Please refer to the [documentation](https://docs.cleanrl.dev/get-started/zoo/) for more detail.
## Command to reproduce the training
```bash
curl -OL https://huggingface.co/vwxyzjn/StarpilotHard-v0-cleanba_ppo_envpool_procgen-seed1/raw/main/cleanba_ppo_envpool_procgen.py
curl -OL https://huggingface.co/vwxyzjn/StarpilotHard-v0-cleanba_ppo_envpool_procgen-seed1/raw/main/pyproject.toml
curl -OL https://huggingface.co/vwxyzjn/StarpilotHard-v0-cleanba_ppo_envpool_procgen-seed1/raw/main/poetry.lock
poetry install --all-extras
python cleanba_ppo_envpool_procgen.py --total-timesteps 200000 --distributed --track --save-model --upload-model --env-id StarpilotHard-v0 --seed 1
```
# Hyperparameters
```python
{'actor_device_ids': [0],
'actor_devices': ['gpu:0'],
'anneal_lr': False,
'async_batch_size': 20,
'async_update': 3,
'batch_size': 61440,
'capture_video': False,
'clip_coef': 0.2,
'cuda': True,
'distributed': True,
'ent_coef': 0.01,
'env_id': 'StarpilotHard-v0',
'exp_name': 'cleanba_ppo_envpool_procgen',
'gae_lambda': 0.95,
'gamma': 0.999,
'global_learner_decices': ['gpu:0', 'gpu:1', 'gpu:2', 'gpu:3'],
'hf_entity': '',
'learner_device_ids': [0],
'learner_devices': ['gpu:0'],
'learning_rate': 0.0005,
'local_batch_size': 15360,
'local_minibatch_size': 1920,
'local_num_envs': 60,
'local_rank': 0,
'max_grad_norm': 0.5,
'minibatch_size': 7680,
'norm_adv': True,
'num_envs': 240,
'num_minibatches': 8,
'num_steps': 256,
'num_updates': 3,
'profile': False,
'save_model': True,
'seed': 1,
'target_kl': None,
'test_actor_learner_throughput': False,
'torch_deterministic': True,
'total_timesteps': 200000,
'track': True,
'update_epochs': 3,
'upload_model': True,
'vf_coef': 0.5,
'wandb_entity': None,
'wandb_project_name': 'cleanRL',
'world_size': 4}
```
|
Dbluciferm3737/Idk
|
[] | null |
{
"architectures": null,
"model_type": null,
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 0 | null |
---
tags:
- unity-ml-agents
- ml-agents
- deep-reinforcement-learning
- reinforcement-learning
- ML-Agents-SoccerTwos
library_name: ml-agents
---
# **poca** Agent playing **SoccerTwos**
This is a trained model of a **poca** agent playing **SoccerTwos** using the [Unity ML-Agents Library](https://github.com/Unity-Technologies/ml-agents).
## Usage (with ML-Agents)
The Documentation: https://github.com/huggingface/ml-agents#get-started
We wrote a complete tutorial to learn to train your first agent using ML-Agents and publish it to the Hub:
### Resume the training
```
mlagents-learn <your_configuration_file_path.yaml> --run-id=<run_id> --resume
```
### Watch your Agent play
You can watch your agent **playing directly in your browser:**.
1. Go to https://huggingface.co/spaces/unity/ML-Agents-SoccerTwos
2. Step 1: Write your model_id: Artachtron/SoccerTwos
3. Step 2: Select your *.nn /*.onnx file
4. Click on Watch the agent play 👀
|
Ddarkros/Test
|
[] | null |
{
"architectures": null,
"model_type": null,
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 0 | null |
---
tags:
- generated_from_trainer
datasets:
- xsum
metrics:
- rouge
model-index:
- name: base-6-3
results:
- task:
name: Summarization
type: summarization
dataset:
name: xsum
type: xsum
config: default
split: validation
args: default
metrics:
- name: Rouge1
type: rouge
value: 38.5542
---
<!-- This model card has been generated automatically according to the information the Trainer had access to. You
should probably proofread and complete it, then remove this comment. -->
# base-6-3
This model is a fine-tuned version of [x/base-6-3/](https://huggingface.co/x/base-6-3/) on the xsum dataset.
It achieves the following results on the evaluation set:
- Loss: 1.9085
- Rouge1: 38.5542
- Rouge2: 15.3992
- Rougel: 30.8781
- Rougelsum: 30.873
- Gen Len: 27.4196
## Model description
More information needed
## Intended uses & limitations
More information needed
## Training and evaluation data
More information needed
## Training procedure
### Training hyperparameters
The following hyperparameters were used during training:
- learning_rate: 0.0001
- train_batch_size: 16
- eval_batch_size: 16
- seed: 42
- gradient_accumulation_steps: 4
- total_train_batch_size: 64
- optimizer: Adam with betas=(0.9,0.999) and epsilon=1e-08
- lr_scheduler_type: constant
- num_epochs: 3.0
### Training results
### Framework versions
- Transformers 4.27.0.dev0
- Pytorch 1.12.1+cu113
- Datasets 2.10.0
- Tokenizers 0.13.2
|
DeadBeast/emoBERTTamil
|
[
"pytorch",
"tensorboard",
"bert",
"text-classification",
"dataset:tamilmixsentiment",
"transformers",
"generated_from_trainer",
"license:apache-2.0"
] |
text-classification
|
{
"architectures": [
"BertForSequenceClassification"
],
"model_type": "bert",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 35 | null |
---
tags:
- generated_from_trainer
datasets:
- xsum
metrics:
- rouge
model-index:
- name: base-1-1
results:
- task:
name: Summarization
type: summarization
dataset:
name: xsum
type: xsum
config: default
split: validation
args: default
metrics:
- name: Rouge1
type: rouge
value: 27.443
---
<!-- This model card has been generated automatically according to the information the Trainer had access to. You
should probably proofread and complete it, then remove this comment. -->
# base-1-1
This model is a fine-tuned version of [x/base-1-1/](https://huggingface.co/x/base-1-1/) on the xsum dataset.
It achieves the following results on the evaluation set:
- Loss: 2.8338
- Rouge1: 27.443
- Rouge2: 7.7415
- Rougel: 21.9556
- Rougelsum: 21.9531
- Gen Len: 29.3842
## Model description
More information needed
## Intended uses & limitations
More information needed
## Training and evaluation data
More information needed
## Training procedure
### Training hyperparameters
The following hyperparameters were used during training:
- learning_rate: 0.0001
- train_batch_size: 16
- eval_batch_size: 16
- seed: 42
- gradient_accumulation_steps: 4
- total_train_batch_size: 64
- optimizer: Adam with betas=(0.9,0.999) and epsilon=1e-08
- lr_scheduler_type: constant
- num_epochs: 3.0
### Training results
### Framework versions
- Transformers 4.27.0.dev0
- Pytorch 1.12.1+cu113
- Datasets 2.10.0
- Tokenizers 0.13.2
|
DeadBeast/marathi-roberta-base
|
[] | null |
{
"architectures": null,
"model_type": null,
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 0 | null |
---
tags:
- generated_from_trainer
datasets:
- xsum
metrics:
- rouge
model-index:
- name: base-6-2
results:
- task:
name: Summarization
type: summarization
dataset:
name: xsum
type: xsum
config: default
split: validation
args: default
metrics:
- name: Rouge1
type: rouge
value: 38.0368
---
<!-- This model card has been generated automatically according to the information the Trainer had access to. You
should probably proofread and complete it, then remove this comment. -->
# base-6-2
This model is a fine-tuned version of [x/6-2/](https://huggingface.co/x/6-2/) on the xsum dataset.
It achieves the following results on the evaluation set:
- Loss: 2.0713
- Rouge1: 38.0368
- Rouge2: 15.1872
- Rougel: 30.6474
- Rougelsum: 30.6344
- Gen Len: 26.3968
## Model description
More information needed
## Intended uses & limitations
More information needed
## Training and evaluation data
More information needed
## Training procedure
### Training hyperparameters
The following hyperparameters were used during training:
- learning_rate: 0.0001
- train_batch_size: 2
- eval_batch_size: 4
- seed: 42
- gradient_accumulation_steps: 32
- total_train_batch_size: 64
- optimizer: Adam with betas=(0.9,0.999) and epsilon=1e-08
- lr_scheduler_type: constant
- num_epochs: 3.0
### Training results
### Framework versions
- Transformers 4.27.0.dev0
- Pytorch 1.13.0+cu117
- Datasets 2.7.1
- Tokenizers 0.12.1
|
DeadBeast/roberta-base-pretrained-mr-2
|
[
"pytorch",
"jax",
"roberta",
"fill-mask",
"transformers",
"autotrain_compatible"
] |
fill-mask
|
{
"architectures": [
"RobertaForMaskedLM"
],
"model_type": "roberta",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 5 | null |
---
license: apache-2.0
tags:
- generated_from_trainer
datasets:
- imagefolder
metrics:
- accuracy
model-index:
- name: swin-tiny-patch4-window7-224-finetuned-eurosat
results:
- task:
name: Image Classification
type: image-classification
dataset:
name: imagefolder
type: imagefolder
config: default
split: train
args: default
metrics:
- name: Accuracy
type: accuracy
value: 0.9785185185185186
---
<!-- This model card has been generated automatically according to the information the Trainer had access to. You
should probably proofread and complete it, then remove this comment. -->
# swin-tiny-patch4-window7-224-finetuned-eurosat
This model is a fine-tuned version of [microsoft/swin-tiny-patch4-window7-224](https://huggingface.co/microsoft/swin-tiny-patch4-window7-224) on the imagefolder dataset.
It achieves the following results on the evaluation set:
- Loss: 0.0575
- Accuracy: 0.9785
## Model description
More information needed
## Intended uses & limitations
More information needed
## Training and evaluation data
More information needed
## Training procedure
### Training hyperparameters
The following hyperparameters were used during training:
- learning_rate: 5e-05
- train_batch_size: 32
- eval_batch_size: 32
- seed: 42
- gradient_accumulation_steps: 4
- total_train_batch_size: 128
- optimizer: Adam with betas=(0.9,0.999) and epsilon=1e-08
- lr_scheduler_type: linear
- lr_scheduler_warmup_ratio: 0.1
- num_epochs: 3
### Training results
| Training Loss | Epoch | Step | Validation Loss | Accuracy |
|:-------------:|:-----:|:----:|:---------------:|:--------:|
| 0.2258 | 1.0 | 190 | 0.1188 | 0.9596 |
| 0.1613 | 2.0 | 380 | 0.0786 | 0.9711 |
| 0.1636 | 3.0 | 570 | 0.0575 | 0.9785 |
### Framework versions
- Transformers 4.26.1
- Pytorch 1.13.1+cu116
- Datasets 2.10.0
- Tokenizers 0.13.2
|
Declan/Breitbart_model_v3
|
[
"pytorch",
"bert",
"fill-mask",
"transformers",
"autotrain_compatible"
] |
fill-mask
|
{
"architectures": [
"BertForMaskedLM"
],
"model_type": "bert",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 7 | null |
---
library_name: stable-baselines3
tags:
- MountainCar-v0
- deep-reinforcement-learning
- reinforcement-learning
- stable-baselines3
model-index:
- name: DQN
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: MountainCar-v0
type: MountainCar-v0
metrics:
- type: mean_reward
value: -116.60 +/- 27.47
name: mean_reward
verified: false
---
# **DQN** Agent playing **MountainCar-v0**
This is a trained model of a **DQN** agent playing **MountainCar-v0**
using the [stable-baselines3 library](https://github.com/DLR-RM/stable-baselines3).
## Usage (with Stable-baselines3)
TODO: Add your code
```python
from stable_baselines3 import ...
from huggingface_sb3 import load_from_hub
...
```
|
Declan/CNN_model_v8
|
[
"pytorch",
"bert",
"fill-mask",
"transformers",
"autotrain_compatible"
] |
fill-mask
|
{
"architectures": [
"BertForMaskedLM"
],
"model_type": "bert",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 3 | null |
---
license: apache-2.0
tags:
- generated_from_trainer
datasets:
- billsum
metrics:
- rouge
model-index:
- name: my_awesome_billsum_model
results:
- task:
name: Sequence-to-sequence Language Modeling
type: text2text-generation
dataset:
name: billsum
type: billsum
config: default
split: ca_test
args: default
metrics:
- name: Rouge1
type: rouge
value: 0.1401
---
<!-- This model card has been generated automatically according to the information the Trainer had access to. You
should probably proofread and complete it, then remove this comment. -->
# my_awesome_billsum_model
This model is a fine-tuned version of [t5-small](https://huggingface.co/t5-small) on the billsum dataset.
It achieves the following results on the evaluation set:
- Loss: 2.5143
- Rouge1: 0.1401
- Rouge2: 0.0494
- Rougel: 0.1153
- Rougelsum: 0.1153
- Gen Len: 19.0
## Model description
More information needed
## Intended uses & limitations
More information needed
## Training and evaluation data
More information needed
## Training procedure
### Training hyperparameters
The following hyperparameters were used during training:
- learning_rate: 2e-05
- train_batch_size: 16
- eval_batch_size: 16
- seed: 42
- optimizer: Adam with betas=(0.9,0.999) and epsilon=1e-08
- lr_scheduler_type: linear
- num_epochs: 4
### Training results
| Training Loss | Epoch | Step | Validation Loss | Rouge1 | Rouge2 | Rougel | Rougelsum | Gen Len |
|:-------------:|:-----:|:----:|:---------------:|:------:|:------:|:------:|:---------:|:-------:|
| No log | 1.0 | 62 | 2.6716 | 0.1286 | 0.0402 | 0.1071 | 0.1072 | 19.0 |
| No log | 2.0 | 124 | 2.5579 | 0.1376 | 0.0486 | 0.1137 | 0.1138 | 19.0 |
| No log | 3.0 | 186 | 2.5187 | 0.1391 | 0.0484 | 0.1149 | 0.115 | 19.0 |
| No log | 4.0 | 248 | 2.5143 | 0.1401 | 0.0494 | 0.1153 | 0.1153 | 19.0 |
### Framework versions
- Transformers 4.21.2
- Pytorch 1.13.0
- Datasets 2.7.1
- Tokenizers 0.12.1
|
Declan/ChicagoTribune_model_v7
|
[
"pytorch",
"bert",
"fill-mask",
"transformers",
"autotrain_compatible"
] |
fill-mask
|
{
"architectures": [
"BertForMaskedLM"
],
"model_type": "bert",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 7 | null |
---
tags:
- autotrain
- summarization
language:
- en
widget:
- text: he says this word when he is excited
datasets:
- bsenker/autotrain-data-swords
co2_eq_emissions:
emissions: 0.025105486031472425
pipeline_tag: summarization
---
# Model Trained Using AutoTrain
- Problem type: Summarization
- Model ID: 37880100395
- CO2 Emissions (in grams): 0.0251
## Validation Metrics
- Loss: 1.557
- Rouge1: 62.140
- Rouge2: 13.128
- RougeL: 61.331
- RougeLsum: 60.728
- Gen Len: 3.989
## Usage
You can use cURL to access this model:
```
$ curl -X POST -H "Authorization: Bearer YOUR_HUGGINGFACE_API_KEY" -H "Content-Type: application/json" -d '{"inputs": "I love AutoTrain"}' https://api-inference.huggingface.co/bsenker/autotrain-swords-37880100395
```
|
Declan/FoxNews_model_v3
|
[
"pytorch",
"bert",
"fill-mask",
"transformers",
"autotrain_compatible"
] |
fill-mask
|
{
"architectures": [
"BertForMaskedLM"
],
"model_type": "bert",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 7 | null |
---
tags:
- CartPole-v1
- reinforce
- reinforcement-learning
- custom-implementation
- deep-rl-class
model-index:
- name: u4_cartpole
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: CartPole-v1
type: CartPole-v1
metrics:
- type: mean_reward
value: 500.00 +/- 0.00
name: mean_reward
verified: false
---
# **Reinforce** Agent playing **CartPole-v1**
This is a trained model of a **Reinforce** agent playing **CartPole-v1** .
To learn to use this model and train yours check Unit 4 of the Deep Reinforcement Learning Course: https://huggingface.co/deep-rl-course/unit4/introduction
|
Declan/FoxNews_model_v4
|
[
"pytorch",
"bert",
"fill-mask",
"transformers",
"autotrain_compatible"
] |
fill-mask
|
{
"architectures": [
"BertForMaskedLM"
],
"model_type": "bert",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 7 | null |
---
library_name: stable-baselines3
tags:
- AntBulletEnv-v0
- deep-reinforcement-learning
- reinforcement-learning
- stable-baselines3
model-index:
- name: A2C
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: AntBulletEnv-v0
type: AntBulletEnv-v0
metrics:
- type: mean_reward
value: 2114.81 +/- 106.21
name: mean_reward
verified: false
---
# **A2C** Agent playing **AntBulletEnv-v0**
This is a trained model of a **A2C** agent playing **AntBulletEnv-v0**
using the [stable-baselines3 library](https://github.com/DLR-RM/stable-baselines3).
## Usage (with Stable-baselines3)
TODO: Add your code
```python
from stable_baselines3 import ...
from huggingface_sb3 import load_from_hub
...
```
|
Declan/FoxNews_model_v8
|
[
"pytorch",
"bert",
"fill-mask",
"transformers",
"autotrain_compatible"
] |
fill-mask
|
{
"architectures": [
"BertForMaskedLM"
],
"model_type": "bert",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 3 | 2023-02-28T00:47:04Z |
---
library_name: stable-baselines3
tags:
- SpaceInvadersNoFrameskip-v4
- deep-reinforcement-learning
- reinforcement-learning
- stable-baselines3
model-index:
- name: DQN
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: SpaceInvadersNoFrameskip-v4
type: SpaceInvadersNoFrameskip-v4
metrics:
- type: mean_reward
value: 701.50 +/- 291.41
name: mean_reward
verified: false
---
# **DQN** Agent playing **SpaceInvadersNoFrameskip-v4**
This is a trained model of a **DQN** agent playing **SpaceInvadersNoFrameskip-v4**
using the [stable-baselines3 library](https://github.com/DLR-RM/stable-baselines3)
and the [RL Zoo](https://github.com/DLR-RM/rl-baselines3-zoo).
The RL Zoo is a training framework for Stable Baselines3
reinforcement learning agents,
with hyperparameter optimization and pre-trained agents included.
## Usage (with SB3 RL Zoo)
RL Zoo: https://github.com/DLR-RM/rl-baselines3-zoo<br/>
SB3: https://github.com/DLR-RM/stable-baselines3<br/>
SB3 Contrib: https://github.com/Stable-Baselines-Team/stable-baselines3-contrib
Install the RL Zoo (with SB3 and SB3-Contrib):
```bash
pip install rl_zoo3
```
```
# Download model and save it into the logs/ folder
python -m rl_zoo3.load_from_hub --algo dqn --env SpaceInvadersNoFrameskip-v4 -orga dcduplooy -f logs/
python -m rl_zoo3.enjoy --algo dqn --env SpaceInvadersNoFrameskip-v4 -f logs/
```
If you installed the RL Zoo3 via pip (`pip install rl_zoo3`), from anywhere you can do:
```
python -m rl_zoo3.load_from_hub --algo dqn --env SpaceInvadersNoFrameskip-v4 -orga dcduplooy -f logs/
python -m rl_zoo3.enjoy --algo dqn --env SpaceInvadersNoFrameskip-v4 -f logs/
```
## Training (with the RL Zoo)
```
python -m rl_zoo3.train --algo dqn --env SpaceInvadersNoFrameskip-v4 -f logs/
# Upload the model and generate video (when possible)
python -m rl_zoo3.push_to_hub --algo dqn --env SpaceInvadersNoFrameskip-v4 -f logs/ -orga dcduplooy
```
## Hyperparameters
```python
OrderedDict([('batch_size', 32),
('buffer_size', 100000),
('env_wrapper',
['stable_baselines3.common.atari_wrappers.AtariWrapper']),
('exploration_final_eps', 0.01),
('exploration_fraction', 0.1),
('frame_stack', 4),
('gradient_steps', 1),
('learning_rate', 0.0001),
('learning_starts', 100000),
('n_timesteps', 1000000.0),
('optimize_memory_usage', False),
('policy', 'CnnPolicy'),
('target_update_interval', 1000),
('train_freq', 4),
('normalize', False)])
```
|
Declan/HuffPost_model_v8
|
[
"pytorch",
"bert",
"fill-mask",
"transformers",
"autotrain_compatible"
] |
fill-mask
|
{
"architectures": [
"BertForMaskedLM"
],
"model_type": "bert",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 7 | null |
---
license: mit
tags:
- pytorch
- diffusers
- unconditional-audio-generation
- diffusion-models-class
---
# Model Card for Unit 4 of the [Diffusion Models Class 🧨](https://github.com/huggingface/diffusion-models-class)
This model is a diffusion model for unconditional audio generation of music in the genre Hip-Hop
## Usage
```python
from IPython.display import Audio
from diffusers import DiffusionPipeline
pipe = DiffusionPipeline.from_pretrained("juancopi81/audio-diffusion-hip-hop-test")
output = pipe()
display(output.images[0])
display(Audio(output.audios[0], rate=pipe.mel.get_sample_rate()))
```
|
Declan/NewYorkTimes_model_v3
|
[] | null |
{
"architectures": null,
"model_type": null,
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 0 | null |
---
license: cc-by-4.0
metrics:
- bleu4
- meteor
- rouge-l
- bertscore
- moverscore
language: ko
datasets:
- lmqg/qg_koquad
pipeline_tag: text2text-generation
tags:
- question answering
widget:
- text: "question: 매드 클라운이 참가해 큰 화제를 모았던 프로그램은?, context: 과거 소울 컴퍼니 소속으로 소울 컴퍼니 해체 후 현재의 소속사는 스타쉽 엑스이다. Mad Clown vs Crucial Star (매드 클라운 vs 크루셜 스타)라는 프로젝트 그룹으로 크루셜 스타와 함께 활동하기도 하였으며, 2013년부터는 MC인 저스디스와 팀을 이루어 랩 듀오 커먼콜드로 활동하고 있다. 또한 Mnet 《쇼미더머니 2》에서 참가자로 참가하여 큰 화제를 모았으며, 《쇼미더머니 5》에서는 길 & 매드 클라운 팀으로 프로듀서로 출연하였다., 재발매 물량도 완판되어 추가 제작에 들어갔다. 2016년 4월, 소속사와 자신의 SNS를 통해 2016년 5월 15일 현재 교제 중인 일반인 여자친구와의 결혼을 공식발표하였다."
example_title: "Question Answering Example 1"
- text: "question: 1913년 필라델피아 애슬레틱스의 개막전 상대는?, context: 1913년 시즌을 앞두고 스프링 트레이닝에서 잭 쿰스는 앨라배마 주 몽고메리에서 고열로 힘들어했는데, 당시에는 식중독 및 늑막염 진단을 받고 휴식을 취했다. 4월 10일, 보스턴 레드삭스를 상대로 치러진 개막전에서 잭 쿰스는 선발투수로 내정되었다. 그는 3이닝을 노히트로 막고 6회 치프 벤더와 교체되었으며, 경기는 10-5로 애슬레틱스가 승리했다. 이틀 뒤에 다시 선발 등판에 나섰으나 ⁄3이닝 동안 2피안타 1볼넷, 4실점만을 기록하고 강판되었다. 쿰스는 보스턴에서의 시리즈를 끝내고 팀 동료들과 함께 워싱턴으로 향했지만, 고통이 심해지자 구단은 그를 필라델피아로 돌려보냈다. 그곳에서 그는 장티푸스 진단을 받고 휴식을 취했으며, 8월에 다시 팀에 복귀하려고 했지만 정상적인 회복을 위해서 다시 병원에 들어갔다. 이 기간 몸무게가 25 kg 가량이나 감소했다. 이 해 필라델피아 애슬레틱스는 월드 시리즈에서 2년만에 다시 뉴욕 자이언츠와 맞붙었고, 우승을 차지했다. 쿰스의 공백기는 다음해인 1914년 시즌까지 길어졌다. 이 해 시즌에는 팀 순위가 정해진 시즌 막판에야 두 경기에 선발 출전해서, 도합 8이닝 8피안타 4실점, 4.50의 평균자책점을 기록했다. 시즌 후인 12월 9일, 애슬레틱스에서 방출되었다."
example_title: "Question Answering Example 2"
model-index:
- name: lmqg/mt5-small-koquad-qa
results:
- task:
name: Text2text Generation
type: text2text-generation
dataset:
name: lmqg/qg_koquad
type: default
args: default
metrics:
- name: BLEU4 (Question Answering)
type: bleu4_question_answering
value: 32.74
- name: ROUGE-L (Question Answering)
type: rouge_l_question_answering
value: 73.14
- name: METEOR (Question Answering)
type: meteor_question_answering
value: 52.94
- name: BERTScore (Question Answering)
type: bertscore_question_answering
value: 96.54
- name: MoverScore (Question Answering)
type: moverscore_question_answering
value: 90.93
- name: AnswerF1Score (Question Answering)
type: answer_f1_score__question_answering
value: 77.1
- name: AnswerExactMatch (Question Answering)
type: answer_exact_match_question_answering
value: 70.59
---
# Model Card of `lmqg/mt5-small-koquad-qa`
This model is fine-tuned version of [google/mt5-small](https://huggingface.co/google/mt5-small) for question answering task on the [lmqg/qg_koquad](https://huggingface.co/datasets/lmqg/qg_koquad) (dataset_name: default) via [`lmqg`](https://github.com/asahi417/lm-question-generation).
### Overview
- **Language model:** [google/mt5-small](https://huggingface.co/google/mt5-small)
- **Language:** ko
- **Training data:** [lmqg/qg_koquad](https://huggingface.co/datasets/lmqg/qg_koquad) (default)
- **Online Demo:** [https://autoqg.net/](https://autoqg.net/)
- **Repository:** [https://github.com/asahi417/lm-question-generation](https://github.com/asahi417/lm-question-generation)
- **Paper:** [https://arxiv.org/abs/2210.03992](https://arxiv.org/abs/2210.03992)
### Usage
- With [`lmqg`](https://github.com/asahi417/lm-question-generation#lmqg-language-model-for-question-generation-)
```python
from lmqg import TransformersQG
# initialize model
model = TransformersQG(language="ko", model="lmqg/mt5-small-koquad-qa")
# model prediction
answers = model.answer_q(list_question="매드 클라운이 참가해 큰 화제를 모았던 프로그램은?", list_context=" 과거 소울 컴퍼니 소속으로 소울 컴퍼니 해체 후 현재의 소속사는 스타쉽 엑스이다. Mad Clown vs Crucial Star (매드 클라운 vs 크루셜 스타)라는 프로젝트 그룹으로 크루셜 스타와 함께 활동하기도 하였으며, 2013년부터는 MC인 저스디스와 팀을 이루어 랩 듀오 커먼콜드로 활동하고 있다. 또한 Mnet 《쇼미더머니 2》에서 참가자로 참가하여 큰 화제를 모았으며, 《쇼미더머니 5》에서는 길 & 매드 클라운 팀으로 프로듀서로 출연하였다., 재발매 물량도 완판되어 추가 제작에 들어갔다. 2016년 4월, 소속사와 자신의 SNS를 통해 2016년 5월 15일 현재 교제 중인 일반인 여자친구와의 결혼을 공식발표하였다.")
```
- With `transformers`
```python
from transformers import pipeline
pipe = pipeline("text2text-generation", "lmqg/mt5-small-koquad-qa")
output = pipe("question: 매드 클라운이 참가해 큰 화제를 모았던 프로그램은?, context: 과거 소울 컴퍼니 소속으로 소울 컴퍼니 해체 후 현재의 소속사는 스타쉽 엑스이다. Mad Clown vs Crucial Star (매드 클라운 vs 크루셜 스타)라는 프로젝트 그룹으로 크루셜 스타와 함께 활동하기도 하였으며, 2013년부터는 MC인 저스디스와 팀을 이루어 랩 듀오 커먼콜드로 활동하고 있다. 또한 Mnet 《쇼미더머니 2》에서 참가자로 참가하여 큰 화제를 모았으며, 《쇼미더머니 5》에서는 길 & 매드 클라운 팀으로 프로듀서로 출연하였다., 재발매 물량도 완판되어 추가 제작에 들어갔다. 2016년 4월, 소속사와 자신의 SNS를 통해 2016년 5월 15일 현재 교제 중인 일반인 여자친구와의 결혼을 공식발표하였다.")
```
## Evaluation
- ***Metric (Question Answering)***: [raw metric file](https://huggingface.co/lmqg/mt5-small-koquad-qa/raw/main/eval/metric.first.answer.paragraph_question.answer.lmqg_qg_koquad.default.json)
| | Score | Type | Dataset |
|:-----------------|--------:|:--------|:-----------------------------------------------------------------|
| AnswerExactMatch | 70.59 | default | [lmqg/qg_koquad](https://huggingface.co/datasets/lmqg/qg_koquad) |
| AnswerF1Score | 77.1 | default | [lmqg/qg_koquad](https://huggingface.co/datasets/lmqg/qg_koquad) |
| BERTScore | 96.54 | default | [lmqg/qg_koquad](https://huggingface.co/datasets/lmqg/qg_koquad) |
| Bleu_1 | 66.01 | default | [lmqg/qg_koquad](https://huggingface.co/datasets/lmqg/qg_koquad) |
| Bleu_2 | 57.02 | default | [lmqg/qg_koquad](https://huggingface.co/datasets/lmqg/qg_koquad) |
| Bleu_3 | 46.02 | default | [lmqg/qg_koquad](https://huggingface.co/datasets/lmqg/qg_koquad) |
| Bleu_4 | 32.74 | default | [lmqg/qg_koquad](https://huggingface.co/datasets/lmqg/qg_koquad) |
| METEOR | 52.94 | default | [lmqg/qg_koquad](https://huggingface.co/datasets/lmqg/qg_koquad) |
| MoverScore | 90.93 | default | [lmqg/qg_koquad](https://huggingface.co/datasets/lmqg/qg_koquad) |
| ROUGE_L | 73.14 | default | [lmqg/qg_koquad](https://huggingface.co/datasets/lmqg/qg_koquad) |
## Training hyperparameters
The following hyperparameters were used during fine-tuning:
- dataset_path: lmqg/qg_koquad
- dataset_name: default
- input_types: ['paragraph_question']
- output_types: ['answer']
- prefix_types: None
- model: google/mt5-small
- max_length: 512
- max_length_output: 32
- epoch: 15
- batch: 16
- lr: 0.0001
- fp16: False
- random_seed: 1
- gradient_accumulation_steps: 4
- label_smoothing: 0.15
The full configuration can be found at [fine-tuning config file](https://huggingface.co/lmqg/mt5-small-koquad-qa/raw/main/trainer_config.json).
## Citation
```
@inproceedings{ushio-etal-2022-generative,
title = "{G}enerative {L}anguage {M}odels for {P}aragraph-{L}evel {Q}uestion {G}eneration",
author = "Ushio, Asahi and
Alva-Manchego, Fernando and
Camacho-Collados, Jose",
booktitle = "Proceedings of the 2022 Conference on Empirical Methods in Natural Language Processing",
month = dec,
year = "2022",
address = "Abu Dhabi, U.A.E.",
publisher = "Association for Computational Linguistics",
}
```
|
Declan/NewYorkTimes_model_v6
|
[
"pytorch",
"bert",
"fill-mask",
"transformers",
"autotrain_compatible"
] |
fill-mask
|
{
"architectures": [
"BertForMaskedLM"
],
"model_type": "bert",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 5 | null |
---
tags:
- Taxi-v3
- q-learning
- reinforcement-learning
- custom-implementation
model-index:
- name: Taxi-v3
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: Taxi-v3
type: Taxi-v3
metrics:
- type: mean_reward
value: 7.48 +/- 2.79
name: mean_reward
verified: false
---
# **Q-Learning** Agent playing1 **Taxi-v3**
This is a trained model of a **Q-Learning** agent playing **Taxi-v3** .
## Usage
```python
model = load_from_hub(repo_id="Gonalb/Taxi-v3", filename="q-learning.pkl")
# Don't forget to check if you need to add additional attributes (is_slippery=False etc)
env = gym.make(model["env_id"])
```
|
Declan/WallStreetJournal_model_v2
|
[
"pytorch",
"bert",
"fill-mask",
"transformers",
"autotrain_compatible"
] |
fill-mask
|
{
"architectures": [
"BertForMaskedLM"
],
"model_type": "bert",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 7 | null |
---
license: apache-2.0
tags:
- generated_from_trainer
datasets:
- squad
model-index:
- name: distilbert-squad
results: []
---
<!-- This model card has been generated automatically according to the information the Trainer had access to. You
should probably proofread and complete it, then remove this comment. -->
# distilbert-squad
This model is a fine-tuned version of [distilbert-base-uncased](https://huggingface.co/distilbert-base-uncased) on the squad dataset.
It achieves the following results on the evaluation set:
- Loss: 1.6858
## Model description
More information needed
## Intended uses & limitations
More information needed
## Training and evaluation data
More information needed
## Training procedure
### Training hyperparameters
The following hyperparameters were used during training:
- learning_rate: 2e-05
- train_batch_size: 16
- eval_batch_size: 16
- seed: 42
- optimizer: Adam with betas=(0.9,0.999) and epsilon=1e-08
- lr_scheduler_type: linear
- num_epochs: 3
### Training results
| Training Loss | Epoch | Step | Validation Loss |
|:-------------:|:-----:|:----:|:---------------:|
| No log | 1.0 | 250 | 2.2991 |
| 2.6805 | 2.0 | 500 | 1.7488 |
| 2.6805 | 3.0 | 750 | 1.6858 |
### Framework versions
- Transformers 4.26.1
- Pytorch 1.13.1+cu116
- Datasets 2.10.0
- Tokenizers 0.13.2
|
DeltaHub/adapter_t5-3b_mrpc
|
[
"pytorch",
"transformers"
] | null |
{
"architectures": null,
"model_type": null,
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 3 | null |
---
tags:
- Pixelcopter-PLE-v0
- reinforce
- reinforcement-learning
- custom-implementation
- deep-rl-class
model-index:
- name: Reinforce-Pixelcopter-PLE-v0-Test
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: Pixelcopter-PLE-v0
type: Pixelcopter-PLE-v0
metrics:
- type: mean_reward
value: 23.10 +/- 16.07
name: mean_reward
verified: false
---
# **Reinforce** Agent playing **Pixelcopter-PLE-v0**
This is a trained model of a **Reinforce** agent playing **Pixelcopter-PLE-v0** .
To learn to use this model and train yours check Unit 4 of the Deep Reinforcement Learning Course: https://huggingface.co/deep-rl-course/unit4/introduction
|
DemangeJeremy/4-sentiments-with-flaubert
|
[
"pytorch",
"flaubert",
"text-classification",
"fr",
"transformers",
"sentiments",
"french",
"flaubert-large"
] |
text-classification
|
{
"architectures": [
"FlaubertForSequenceClassification"
],
"model_type": "flaubert",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 226 | null |
# KoDiffCSE
Difference-based Contrastive Learning for Korean Sentence Embeddings <br>
- [DiffCSE-[NAACL 2022]](https://arxiv.org/abs/2204.10298) <br>
- [[Github]](https://github.com/voidism/DiffCSE) Official implementation of DiffCSE <br>
<img src=https://user-images.githubusercontent.com/55969260/201829550-9674a3ac-cb9b-4e17-b777-7d96fdf5c633.png>
## Quick tour
```python
import torch
from transformers import AutoModel, AutoTokenizer
def cal_score(a, b):
if len(a.shape) == 1: a = a.unsqueeze(0)
if len(b.shape) == 1: b = b.unsqueeze(0)
a_norm = a / a.norm(dim=1)[:, None]
b_norm = b / b.norm(dim=1)[:, None]
return torch.mm(a_norm, b_norm.transpose(0, 1)) * 100
model = AutoModel.from_pretrained('BM-K/KoDiffCSE-RoBERTa')
tokenizer = AutoTokenizer.from_pretrained('BM-K/KoDiffCSE-RoBERTa')
sentences = ['치타가 들판을 가로 질러 먹이를 쫓는다.',
'치타 한 마리가 먹이 뒤에서 달리고 있다.',
'원숭이 한 마리가 드럼을 연주한다.']
inputs = tokenizer(sentences, padding=True, truncation=True, return_tensors="pt")
embeddings, _ = model(**inputs, return_dict=False)
score01 = cal_score(embeddings[0][0], embeddings[1][0]) # 84.56
# '치타가 들판을 가로 질러 먹이를 쫓는다.' @ '치타 한 마리가 먹이 뒤에서 달리고 있다.'
score02 = cal_score(embeddings[0][0], embeddings[2][0]) # 48.06
# '치타가 들판을 가로 질러 먹이를 쫓는다.' @ '원숭이 한 마리가 드럼을 연주한다.'
```
## Setups
[](https://www.python.org/downloads/release/python-385/)
[](https://pytorch.org/get-started/previous-versions/)
## Encoder Models
Baseline encoders used for korean sentence embedding - [KLUE-PLMs](https://github.com/KLUE-benchmark/KLUE/blob/main/README.md)
| Model | Embedding size | Hidden size | # Layers | # Heads |
|----------------------|----------------|-------------|----------|---------|
| KLUE-BERT-base | 768 | 768 | 12 | 12 |
| KLUE-RoBERTa-base | 768 | 768 | 12 | 12 |
> **Warning** <br>
> Large pre-trained models need a lot of GPU memory to train
## Datasets
The data must exist in the "--path_to_data" folder
- [wiki-corpus](https://github.com/jeongukjae/korean-wikipedia-corpus) (Unsupervised Training)
- [KorSTS](https://github.com/kakaobrain/KorNLUDatasets) (Validation & Testing)
## Training - unsupervised
```
python main.py \
--model klue/roberta-base \
--generator_name klue/roberta-small \
--multi_gpu True \
--train True \
--test False \
--max_len 64 \
--batch_size 256 \
--epochs 1 \
--eval_steps 125 \
--lr 0.00005 \
--masking_ratio 0.15 \
--lambda_weight 0.005 \
--warmup_ratio 0.05 \
--temperature 0.05 \
--path_to_data Dataset/ \
--train_data wiki_corpus_examples.txt \
--valid_data valid_sts.tsv \
--ckpt best_checkpoint.pt
```
```
bash run_diff.sh
```
> **Note** <br>
> Using roberta as an encoder is beneficial for training because the KoBERT model cannot build a small-sized generator.
## Evaluation
```
python main.py \
--model klue/roberta-base \
--generator klue/roberta-small \
--train False \
--test True \
--max_len 64 \
--batch_size 256 \
--path_to_data Dataset/ \
--test_data test_sts.tsv \
--path_to_saved_model output/best_checkpoint.pt
```
## Performance - unsupervised
| Model | Average | Cosine Pearson | Cosine Spearman | Euclidean Pearson | Euclidean Spearman | Manhattan Pearson | Manhattan Spearman | Dot Pearson | Dot Spearman |
|------------------------|:----:|:----:|:----:|:----:|:----:|:----:|:----:|:----:|:----:|
| KoSRoBERTa-base<sup>†</sup> | N/A | N/A | 48.96 | N/A | N/A | N/A | N/A | N/A | N/A |
| KoSRoBERTa-large<sup>†</sup> | N/A | N/A | 51.35 | N/A | N/A | N/A | N/A | N/A | N/A |
| | | | | | | | | | |
| KoSimCSE-BERT | 74.08 | 74.92 | 73.98 | 74.15 | 74.22 | 74.07 | 74.07 | 74.15 | 73.14 |
| KoSimCSE-RoBERTa | 75.27 | 75.93 | 75.00 | 75.28 | 75.01 | 75.17 | 74.83 | 75.95 | 75.01 |
| | | | | | | | | | |
| KoDiffCSE-RoBERTa | 77.17 | 77.73 | 76.96 | 77.21 | 76.89 | 77.11 | 76.81 | 77.74 | 76.97 |
- [Korean-SRoBERTa<sup>†</sup>](https://arxiv.org/abs/2004.03289)
## License
This work is licensed under a <a rel="license" href="http://creativecommons.org/licenses/by-sa/4.0/">Creative Commons Attribution-ShareAlike 4.0 International License</a>.
<a rel="license" href="http://creativecommons.org/licenses/by-sa/4.0/"><img alt="Creative Commons License" style="border-width:0" src="https://i.creativecommons.org/l/by-sa/4.0/88x31.png" /></a><br />
## References
```bibtex
@inproceedings{chuang2022diffcse,
title={{DiffCSE}: Difference-based Contrastive Learning for Sentence Embeddings},
author={Chuang, Yung-Sung and Dangovski, Rumen and Luo, Hongyin and Zhang, Yang and Chang, Shiyu and Soljacic, Marin and Li, Shang-Wen and Yih, Wen-tau and Kim, Yoon and Glass, James},
booktitle={Annual Conference of the North American Chapter of the Association for Computational Linguistics (NAACL)},
year={2022}
}
@misc{park2021klue,
title={KLUE: Korean Language Understanding Evaluation},
author={Sungjoon Park and Jihyung Moon and Sungdong Kim and Won Ik Cho and Jiyoon Han and Jangwon Park and Chisung Song and Junseong Kim and Yongsook Song and Taehwan Oh and Joohong Lee and Juhyun Oh and Sungwon Lyu and Younghoon Jeong and Inkwon Lee and Sangwoo Seo and Dongjun Lee and Hyunwoo Kim and Myeonghwa Lee and Seongbo Jang and Seungwon Do and Sunkyoung Kim and Kyungtae Lim and Jongwon Lee and Kyumin Park and Jamin Shin and Seonghyun Kim and Lucy Park and Alice Oh and Jungwoo Ha and Kyunghyun Cho},
year={2021},
eprint={2105.09680},
archivePrefix={arXiv},
primaryClass={cs.CL}
}
@article{ham2020kornli,
title={KorNLI and KorSTS: New Benchmark Datasets for Korean Natural Language Understanding},
author={Ham, Jiyeon and Choe, Yo Joong and Park, Kyubyong and Choi, Ilji and Soh, Hyungjoon},
journal={arXiv preprint arXiv:2004.03289},
year={2020}
}
```
|
Denver/distilbert-base-uncased-finetuned-squad
|
[] | null |
{
"architectures": null,
"model_type": null,
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 0 | null |
---
language: en
thumbnail: http://www.huggingtweets.com/aaronsaitama-mannythehitman-saitamaguru1/1677559156742/predictions.png
tags:
- huggingtweets
widget:
- text: "My dream is"
---
<div class="inline-flex flex-col" style="line-height: 1.5;">
<div class="flex">
<div
style="display:inherit; margin-left: 4px; margin-right: 4px; width: 92px; height:92px; border-radius: 50%; background-size: cover; background-image: url('https://pbs.twimg.com/profile_images/1534019152230457346/OOaOK49i_400x400.jpg')">
</div>
<div
style="display:inherit; margin-left: 4px; margin-right: 4px; width: 92px; height:92px; border-radius: 50%; background-size: cover; background-image: url('https://pbs.twimg.com/profile_images/1572387070366158848/ezXfaaRf_400x400.jpg')">
</div>
<div
style="display:inherit; margin-left: 4px; margin-right: 4px; width: 92px; height:92px; border-radius: 50%; background-size: cover; background-image: url('https://pbs.twimg.com/profile_images/1614038101097070595/uZNz3CRU_400x400.jpg')">
</div>
</div>
<div style="text-align: center; margin-top: 3px; font-size: 16px; font-weight: 800">🤖 AI CYBORG 🤖</div>
<div style="text-align: center; font-size: 16px; font-weight: 800">Mkay Saitama & Russell Armand & Aaron🐺Saitama</div>
<div style="text-align: center; font-size: 14px;">@aaronsaitama-mannythehitman-saitamaguru1</div>
</div>
I was made with [huggingtweets](https://github.com/borisdayma/huggingtweets).
Create your own bot based on your favorite user with [the demo](https://colab.research.google.com/github/borisdayma/huggingtweets/blob/master/huggingtweets-demo.ipynb)!
## How does it work?
The model uses the following pipeline.

To understand how the model was developed, check the [W&B report](https://wandb.ai/wandb/huggingtweets/reports/HuggingTweets-Train-a-Model-to-Generate-Tweets--VmlldzoxMTY5MjI).
## Training data
The model was trained on tweets from Mkay Saitama & Russell Armand & Aaron🐺Saitama.
| Data | Mkay Saitama | Russell Armand | Aaron🐺Saitama |
| --- | --- | --- | --- |
| Tweets downloaded | 3191 | 3120 | 3202 |
| Retweets | 1980 | 1490 | 2861 |
| Short tweets | 191 | 127 | 45 |
| Tweets kept | 1020 | 1503 | 296 |
[Explore the data](https://wandb.ai/wandb/huggingtweets/runs/kfxbp7t1/artifacts), which is tracked with [W&B artifacts](https://docs.wandb.com/artifacts) at every step of the pipeline.
## Training procedure
The model is based on a pre-trained [GPT-2](https://huggingface.co/gpt2) which is fine-tuned on @aaronsaitama-mannythehitman-saitamaguru1's tweets.
Hyperparameters and metrics are recorded in the [W&B training run](https://wandb.ai/wandb/huggingtweets/runs/3nsboaoz) for full transparency and reproducibility.
At the end of training, [the final model](https://wandb.ai/wandb/huggingtweets/runs/3nsboaoz/artifacts) is logged and versioned.
## How to use
You can use this model directly with a pipeline for text generation:
```python
from transformers import pipeline
generator = pipeline('text-generation',
model='huggingtweets/aaronsaitama-mannythehitman-saitamaguru1')
generator("My dream is", num_return_sequences=5)
```
## Limitations and bias
The model suffers from [the same limitations and bias as GPT-2](https://huggingface.co/gpt2#limitations-and-bias).
In addition, the data present in the user's tweets further affects the text generated by the model.
## About
*Built by Boris Dayma*
[](https://twitter.com/intent/follow?screen_name=borisdayma)
For more details, visit the project repository.
[](https://github.com/borisdayma/huggingtweets)
|
Dibyaranjan/nl_image_search
|
[] | null |
{
"architectures": null,
"model_type": null,
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 0 | null |
---
library_name: stable-baselines3
tags:
- LunarLander-v2
- deep-reinforcement-learning
- reinforcement-learning
- stable-baselines3
model-index:
- name: PPO
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: LunarLander-v2
type: LunarLander-v2
metrics:
- type: mean_reward
value: 259.17 +/- 17.33
name: mean_reward
verified: false
---
# **PPO** Agent playing **LunarLander-v2**
This is a trained model of a **PPO** agent playing **LunarLander-v2**
using the [stable-baselines3 library](https://github.com/DLR-RM/stable-baselines3).
## Usage (with Stable-baselines3)
TODO: Add your code
```python
from stable_baselines3 import ...
from huggingface_sb3 import load_from_hub
...
```
|
DiegoAlysson/opus-mt-en-ro-finetuned-en-to-ro
|
[
"pytorch",
"tensorboard",
"marian",
"text2text-generation",
"dataset:wmt16",
"transformers",
"generated_from_trainer",
"license:apache-2.0",
"model-index",
"autotrain_compatible"
] |
text2text-generation
|
{
"architectures": [
"MarianMTModel"
],
"model_type": "marian",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 1 | 2023-02-28T05:15:09Z |
---
license: apache-2.0
tags:
- generated_from_keras_callback
model-index:
- name: letingliu/my_awesome_model3
results: []
---
<!-- This model card has been generated automatically according to the information Keras had access to. You should
probably proofread and complete it, then remove this comment. -->
# letingliu/my_awesome_model3
This model is a fine-tuned version of [distilbert-base-uncased](https://huggingface.co/distilbert-base-uncased) on an unknown dataset.
It achieves the following results on the evaluation set:
- Train Loss: 0.5057
- Validation Loss: 0.4900
- Train Accuracy: 0.9245
- Epoch: 18
## Model description
More information needed
## Intended uses & limitations
More information needed
## Training and evaluation data
More information needed
## Training procedure
### Training hyperparameters
The following hyperparameters were used during training:
- optimizer: {'name': 'Adam', 'weight_decay': None, 'clipnorm': None, 'global_clipnorm': None, 'clipvalue': None, 'use_ema': False, 'ema_momentum': 0.99, 'ema_overwrite_frequency': None, 'jit_compile': True, 'is_legacy_optimizer': False, 'learning_rate': {'class_name': 'PolynomialDecay', 'config': {'initial_learning_rate': 2e-05, 'decay_steps': 30, 'end_learning_rate': 0.0, 'power': 1.0, 'cycle': False, 'name': None}}, 'beta_1': 0.9, 'beta_2': 0.999, 'epsilon': 1e-08, 'amsgrad': False}
- training_precision: float32
### Training results
| Train Loss | Validation Loss | Train Accuracy | Epoch |
|:----------:|:---------------:|:--------------:|:-----:|
| 0.6850 | 0.6546 | 0.7170 | 0 |
| 0.6449 | 0.6103 | 0.7547 | 1 |
| 0.5989 | 0.5549 | 0.8774 | 2 |
| 0.5506 | 0.5088 | 0.9151 | 3 |
| 0.5059 | 0.4900 | 0.9245 | 4 |
| 0.4885 | 0.4900 | 0.9245 | 5 |
| 0.4939 | 0.4900 | 0.9245 | 6 |
| 0.4969 | 0.4900 | 0.9245 | 7 |
| 0.4993 | 0.4900 | 0.9245 | 8 |
| 0.4951 | 0.4900 | 0.9245 | 9 |
| 0.5035 | 0.4900 | 0.9245 | 10 |
| 0.5064 | 0.4900 | 0.9245 | 11 |
| 0.5022 | 0.4900 | 0.9245 | 12 |
| 0.5111 | 0.4900 | 0.9245 | 13 |
| 0.5057 | 0.4900 | 0.9245 | 14 |
| 0.4979 | 0.4900 | 0.9245 | 15 |
| 0.5110 | 0.4900 | 0.9245 | 16 |
| 0.5080 | 0.4900 | 0.9245 | 17 |
| 0.5057 | 0.4900 | 0.9245 | 18 |
### Framework versions
- Transformers 4.26.1
- TensorFlow 2.11.0
- Datasets 2.10.0
- Tokenizers 0.13.2
|
DiegoBalam12/institute_classification
|
[] | null |
{
"architectures": null,
"model_type": null,
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 0 | 2023-02-28T05:16:19Z |
---
library_name: stable-baselines3
tags:
- PandaReachDense-v2
- deep-reinforcement-learning
- reinforcement-learning
- stable-baselines3
model-index:
- name: A2C
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: PandaReachDense-v2
type: PandaReachDense-v2
metrics:
- type: mean_reward
value: -1.16 +/- 0.33
name: mean_reward
verified: false
---
# **A2C** Agent playing **PandaReachDense-v2**
This is a trained model of a **A2C** agent playing **PandaReachDense-v2**
using the [stable-baselines3 library](https://github.com/DLR-RM/stable-baselines3).
## Usage (with Stable-baselines3)
TODO: Add your code
```python
from stable_baselines3 import ...
from huggingface_sb3 import load_from_hub
...
```
|
Dkwkk/W
|
[] | null |
{
"architectures": null,
"model_type": null,
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 0 | null |
---
tags:
- unity-ml-agents
- ml-agents
- deep-reinforcement-learning
- reinforcement-learning
- ML-Agents-SoccerTwos
library_name: ml-agents
---
# **poca** Agent playing **SoccerTwos**
This is a trained model of a **poca** agent playing **SoccerTwos** using the [Unity ML-Agents Library](https://github.com/Unity-Technologies/ml-agents).
## Usage (with ML-Agents)
The Documentation: https://github.com/huggingface/ml-agents#get-started
We wrote a complete tutorial to learn to train your first agent using ML-Agents and publish it to the Hub:
### Resume the training
```
mlagents-learn <your_configuration_file_path.yaml> --run-id=<run_id> --resume
```
### Watch your Agent play
You can watch your agent **playing directly in your browser:**.
1. Go to https://huggingface.co/spaces/unity/ML-Agents-SoccerTwos
2. Step 1: Write your model_id: wooihen/pocaSoccerTwos
3. Step 2: Select your *.nn /*.onnx file
4. Click on Watch the agent play 👀
|
Dmitriiserg/Pxd
|
[] | null |
{
"architectures": null,
"model_type": null,
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 0 | null |
---
tags:
- unity-ml-agents
- ml-agents
- deep-reinforcement-learning
- reinforcement-learning
- ML-Agents-Huggy
library_name: ml-agents
---
# **ppo** Agent playing **Huggy**
This is a trained model of a **ppo** agent playing **Huggy** using the [Unity ML-Agents Library](https://github.com/Unity-Technologies/ml-agents).
## Usage (with ML-Agents)
The Documentation: https://github.com/huggingface/ml-agents#get-started
We wrote a complete tutorial to learn to train your first agent using ML-Agents and publish it to the Hub:
### Resume the training
```
mlagents-learn <your_configuration_file_path.yaml> --run-id=<run_id> --resume
```
### Watch your Agent play
You can watch your agent **playing directly in your browser:**.
1. Go to https://huggingface.co/spaces/unity/ML-Agents-Huggy
2. Step 1: Write your model_id: ElementBrawlerAI/ppo-Huggy
3. Step 2: Select your *.nn /*.onnx file
4. Click on Watch the agent play 👀
|
Doiman/DialoGPT-medium-harrypotter
|
[
"pytorch",
"gpt2",
"text-generation",
"transformers",
"conversational"
] |
conversational
|
{
"architectures": [
"GPT2LMHeadModel"
],
"model_type": "gpt2",
"task_specific_params": {
"conversational": {
"max_length": 1000
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 13 | null |
---
language:
- en
license: mit
tags:
- generated_from_trainer
datasets:
- tomekkorbak/detoxify-pile-chunk3-50000-100000
- tomekkorbak/detoxify-pile-chunk3-100000-150000
- tomekkorbak/detoxify-pile-chunk3-150000-200000
- tomekkorbak/detoxify-pile-chunk3-200000-250000
- tomekkorbak/detoxify-pile-chunk3-250000-300000
- tomekkorbak/detoxify-pile-chunk3-300000-350000
- tomekkorbak/detoxify-pile-chunk3-350000-400000
- tomekkorbak/detoxify-pile-chunk3-400000-450000
- tomekkorbak/detoxify-pile-chunk3-450000-500000
- tomekkorbak/detoxify-pile-chunk3-500000-550000
- tomekkorbak/detoxify-pile-chunk3-550000-600000
- tomekkorbak/detoxify-pile-chunk3-600000-650000
- tomekkorbak/detoxify-pile-chunk3-650000-700000
- tomekkorbak/detoxify-pile-chunk3-700000-750000
- tomekkorbak/detoxify-pile-chunk3-750000-800000
- tomekkorbak/detoxify-pile-chunk3-800000-850000
- tomekkorbak/detoxify-pile-chunk3-850000-900000
- tomekkorbak/detoxify-pile-chunk3-900000-950000
- tomekkorbak/detoxify-pile-chunk3-950000-1000000
- tomekkorbak/detoxify-pile-chunk3-1000000-1050000
- tomekkorbak/detoxify-pile-chunk3-1050000-1100000
- tomekkorbak/detoxify-pile-chunk3-1100000-1150000
- tomekkorbak/detoxify-pile-chunk3-1150000-1200000
- tomekkorbak/detoxify-pile-chunk3-1200000-1250000
- tomekkorbak/detoxify-pile-chunk3-1250000-1300000
- tomekkorbak/detoxify-pile-chunk3-1300000-1350000
- tomekkorbak/detoxify-pile-chunk3-1350000-1400000
- tomekkorbak/detoxify-pile-chunk3-1400000-1450000
- tomekkorbak/detoxify-pile-chunk3-1450000-1500000
- tomekkorbak/detoxify-pile-chunk3-1500000-1550000
- tomekkorbak/detoxify-pile-chunk3-1550000-1600000
- tomekkorbak/detoxify-pile-chunk3-1600000-1650000
- tomekkorbak/detoxify-pile-chunk3-1650000-1700000
- tomekkorbak/detoxify-pile-chunk3-1700000-1750000
- tomekkorbak/detoxify-pile-chunk3-1750000-1800000
- tomekkorbak/detoxify-pile-chunk3-1800000-1850000
model-index:
- name: kejian/cpsc-bincond
results: []
---
<!-- This model card has been generated automatically according to the information the Trainer had access to. You
should probably proofread and complete it, then remove this comment. -->
# kejian/cpsc-bincond
This model was trained from scratch on the tomekkorbak/detoxify-pile-chunk3-50000-100000, the tomekkorbak/detoxify-pile-chunk3-100000-150000, the tomekkorbak/detoxify-pile-chunk3-150000-200000, the tomekkorbak/detoxify-pile-chunk3-200000-250000, the tomekkorbak/detoxify-pile-chunk3-250000-300000, the tomekkorbak/detoxify-pile-chunk3-300000-350000, the tomekkorbak/detoxify-pile-chunk3-350000-400000, the tomekkorbak/detoxify-pile-chunk3-400000-450000, the tomekkorbak/detoxify-pile-chunk3-450000-500000, the tomekkorbak/detoxify-pile-chunk3-500000-550000, the tomekkorbak/detoxify-pile-chunk3-550000-600000, the tomekkorbak/detoxify-pile-chunk3-600000-650000, the tomekkorbak/detoxify-pile-chunk3-650000-700000, the tomekkorbak/detoxify-pile-chunk3-700000-750000, the tomekkorbak/detoxify-pile-chunk3-750000-800000, the tomekkorbak/detoxify-pile-chunk3-800000-850000, the tomekkorbak/detoxify-pile-chunk3-850000-900000, the tomekkorbak/detoxify-pile-chunk3-900000-950000, the tomekkorbak/detoxify-pile-chunk3-950000-1000000, the tomekkorbak/detoxify-pile-chunk3-1000000-1050000, the tomekkorbak/detoxify-pile-chunk3-1050000-1100000, the tomekkorbak/detoxify-pile-chunk3-1100000-1150000, the tomekkorbak/detoxify-pile-chunk3-1150000-1200000, the tomekkorbak/detoxify-pile-chunk3-1200000-1250000, the tomekkorbak/detoxify-pile-chunk3-1250000-1300000, the tomekkorbak/detoxify-pile-chunk3-1300000-1350000, the tomekkorbak/detoxify-pile-chunk3-1350000-1400000, the tomekkorbak/detoxify-pile-chunk3-1400000-1450000, the tomekkorbak/detoxify-pile-chunk3-1450000-1500000, the tomekkorbak/detoxify-pile-chunk3-1500000-1550000, the tomekkorbak/detoxify-pile-chunk3-1550000-1600000, the tomekkorbak/detoxify-pile-chunk3-1600000-1650000, the tomekkorbak/detoxify-pile-chunk3-1650000-1700000, the tomekkorbak/detoxify-pile-chunk3-1700000-1750000, the tomekkorbak/detoxify-pile-chunk3-1750000-1800000 and the tomekkorbak/detoxify-pile-chunk3-1800000-1850000 datasets.
## Model description
More information needed
## Intended uses & limitations
More information needed
## Training and evaluation data
More information needed
## Training procedure
### Training hyperparameters
The following hyperparameters were used during training:
- learning_rate: 0.0005
- train_batch_size: 32
- eval_batch_size: 16
- seed: 42
- gradient_accumulation_steps: 2
- total_train_batch_size: 64
- optimizer: Adam with betas=(0.9,0.999) and epsilon=1e-08
- lr_scheduler_type: linear
- lr_scheduler_warmup_ratio: 0.01
- training_steps: 42724
- mixed_precision_training: Native AMP
### Framework versions
- Transformers 4.23.0
- Pytorch 1.13.0+cu116
- Datasets 2.0.0
- Tokenizers 0.12.1
# Full config
{'dataset': {'conditional_training_config': {'aligned_prefix': '<|aligned|>',
'drop_token_fraction': 0.02,
'misaligned_prefix': '<|misaligned|>',
'threshold': 0.0007848},
'datasets': ['tomekkorbak/detoxify-pile-chunk3-50000-100000',
'tomekkorbak/detoxify-pile-chunk3-100000-150000',
'tomekkorbak/detoxify-pile-chunk3-150000-200000',
'tomekkorbak/detoxify-pile-chunk3-200000-250000',
'tomekkorbak/detoxify-pile-chunk3-250000-300000',
'tomekkorbak/detoxify-pile-chunk3-300000-350000',
'tomekkorbak/detoxify-pile-chunk3-350000-400000',
'tomekkorbak/detoxify-pile-chunk3-400000-450000',
'tomekkorbak/detoxify-pile-chunk3-450000-500000',
'tomekkorbak/detoxify-pile-chunk3-500000-550000',
'tomekkorbak/detoxify-pile-chunk3-550000-600000',
'tomekkorbak/detoxify-pile-chunk3-600000-650000',
'tomekkorbak/detoxify-pile-chunk3-650000-700000',
'tomekkorbak/detoxify-pile-chunk3-700000-750000',
'tomekkorbak/detoxify-pile-chunk3-750000-800000',
'tomekkorbak/detoxify-pile-chunk3-800000-850000',
'tomekkorbak/detoxify-pile-chunk3-850000-900000',
'tomekkorbak/detoxify-pile-chunk3-900000-950000',
'tomekkorbak/detoxify-pile-chunk3-950000-1000000',
'tomekkorbak/detoxify-pile-chunk3-1000000-1050000',
'tomekkorbak/detoxify-pile-chunk3-1050000-1100000',
'tomekkorbak/detoxify-pile-chunk3-1100000-1150000',
'tomekkorbak/detoxify-pile-chunk3-1150000-1200000',
'tomekkorbak/detoxify-pile-chunk3-1200000-1250000',
'tomekkorbak/detoxify-pile-chunk3-1250000-1300000',
'tomekkorbak/detoxify-pile-chunk3-1300000-1350000',
'tomekkorbak/detoxify-pile-chunk3-1350000-1400000',
'tomekkorbak/detoxify-pile-chunk3-1400000-1450000',
'tomekkorbak/detoxify-pile-chunk3-1450000-1500000',
'tomekkorbak/detoxify-pile-chunk3-1500000-1550000',
'tomekkorbak/detoxify-pile-chunk3-1550000-1600000',
'tomekkorbak/detoxify-pile-chunk3-1600000-1650000',
'tomekkorbak/detoxify-pile-chunk3-1650000-1700000',
'tomekkorbak/detoxify-pile-chunk3-1700000-1750000',
'tomekkorbak/detoxify-pile-chunk3-1750000-1800000',
'tomekkorbak/detoxify-pile-chunk3-1800000-1850000'],
'is_split_by_sentences': True},
'generation': {'force_call_on': [21362],
'metrics_configs': [{}, {'n': 1}, {'n': 2}, {'n': 5}],
'scenario_configs': [{'generate_kwargs': {'bad_words_ids': [[50257],
[50258]],
'do_sample': True,
'max_length': 128,
'min_length': 10,
'temperature': 0.7,
'top_k': 0,
'top_p': 0.9},
'name': 'unconditional',
'num_samples': 2048,
'prefix': '<|aligned|>'},
{'generate_kwargs': {'bad_words_ids': [[50257],
[50258]],
'do_sample': True,
'max_length': 128,
'min_length': 10,
'temperature': 0.7,
'top_k': 0,
'top_p': 0.9},
'name': 'challenging_rtp',
'num_samples': 1024,
'prefix': '<|aligned|>',
'prompt_before_control': True,
'prompts_path': 'resources/challenging_rtp.jsonl'}],
'scorer_config': {'device': 'cuda:0'}},
'kl_gpt3_callback': {'force_call_on': [21362],
'gpt3_kwargs': {'model_name': 'davinci'},
'max_tokens': 64,
'num_samples': 2048,
'prefix': '<|aligned|>'},
'model': {'from_scratch': True,
'gpt2_config_kwargs': {'reorder_and_upcast_attn': True,
'scale_attn_by': True},
'num_additional_tokens': 2,
'path_or_name': 'gpt2'},
'objective': {'name': 'MLE'},
'tokenizer': {'path_or_name': 'gpt2',
'special_tokens': ['<|aligned|>', '<|misaligned|>']},
'training': {'dataloader_num_workers': 0,
'effective_batch_size': 64,
'evaluation_strategy': 'no',
'fp16': True,
'hub_model_id': 'kejian/cpsc-bincond',
'hub_strategy': 'all_checkpoints',
'learning_rate': 0.0005,
'logging_first_step': True,
'logging_steps': 50,
'num_tokens': 2800000000.0,
'output_dir': 'training_output30',
'per_device_train_batch_size': 16,
'push_to_hub': True,
'remove_unused_columns': False,
'save_steps': 21362,
'save_strategy': 'steps',
'seed': 42,
'warmup_ratio': 0.01,
'weight_decay': 0.1}}
# Wandb URL:
https://wandb.ai/kejian/uncategorized/runs/30tl243y
|
DongHai/DialoGPT-small-rick
|
[
"pytorch",
"gpt2",
"text-generation",
"transformers",
"conversational"
] |
conversational
|
{
"architectures": [
"GPT2LMHeadModel"
],
"model_type": "gpt2",
"task_specific_params": {
"conversational": {
"max_length": 1000
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 9 | null |
# Hindi-Character-Recognition
### The app is live on huggingface spaces! Try it -> [Gradio-HCR](https://huggingface.co/spaces/abhiswain/Gradio-Hindi-Character-Recognition)
## Running the app locally:
You can run the streamlit and gradio app locally.
1. Install the requirements: `pip install -r requirements.txt`
2. Now, just do `streamlit run app.py` or `gradio gradio_app.py`
### Streamlit demo
### Gradio demo

## Training the model (Optional)
1. Install the requirements: `pip install -r requirements.txt`
2. Hindi Character Recognition
Getting the data:
- Download the data from [here](https://www.kaggle.com/datasets/suvooo/hindi-character-recognition)
- Unzip it. You need to split the data into 4 different directories, since we are training for Hindi digits & letters separately.
How to run ?
- You can create your custom model in the `model.py` file or can go with the `HNet` already present. For custom models created, you need to import them to `train.py`, for them to to use. Remember we are training different models for Hindi Digit & Characters.
- Now to train the model with default params do, `python train.py`. You can also specify epochs and lr. Most important, is the `model_type`
- To train do, `python train.py --epochs <num-epochs> --lr <learning-rate> --model_type <type-of-model>`
|
Waynehillsdev/Waynehills_summary_tensorflow
|
[
"tf",
"t5",
"text2text-generation",
"transformers",
"generated_from_keras_callback",
"autotrain_compatible"
] |
text2text-generation
|
{
"architectures": [
"T5ForConditionalGeneration"
],
"model_type": "t5",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 5 | null |
---
tags:
- FrozenLake-v1-4x4-no_slippery
- q-learning
- reinforcement-learning
- custom-implementation
model-index:
- name: GDG_QAADA_Discover_Reinforcement_Learning
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: FrozenLake-v1-4x4-no_slippery
type: FrozenLake-v1-4x4-no_slippery
metrics:
- type: mean_reward
value: 1.00 +/- 0.00
name: mean_reward
verified: false
---
# **Q-Learning** Agent playing **FrozenLake-v1**
This is a trained model of a **Q-Learning** agent playing **FrozenLake-v1** .
## Usage
```python
model = load_from_hub(repo_id="brouthen/GDG_QAADA_Discover_Reinforcement_Learning", filename="q-learning.pkl")
# Don't forget to check if you need to add additional attributes (is_slippery=False etc)
env = gym.make(model["env_id"])
evaluate_agent(env, model["max_steps"], model["n_eval_episodes"], model["qtable"], model["eval_seed"])
```
|
DoyyingFace/bert-asian-hate-tweets-asian-unclean-freeze-12
|
[
"pytorch",
"bert",
"text-classification",
"transformers"
] |
text-classification
|
{
"architectures": [
"BertForSequenceClassification"
],
"model_type": "bert",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 29 | null |
---
library_name: sample-factory
tags:
- deep-reinforcement-learning
- reinforcement-learning
- sample-factory
model-index:
- name: APPO
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: doom_health_gathering_supreme
type: doom_health_gathering_supreme
metrics:
- type: mean_reward
value: 11.62 +/- 4.30
name: mean_reward
verified: false
---
A(n) **APPO** model trained on the **doom_health_gathering_supreme** environment.
This model was trained using Sample-Factory 2.0: https://github.com/alex-petrenko/sample-factory.
Documentation for how to use Sample-Factory can be found at https://www.samplefactory.dev/
## Downloading the model
After installing Sample-Factory, download the model with:
```
python -m sample_factory.huggingface.load_from_hub -r Dharkelf/rl_course_vizdoom_health_gathering_supreme
```
## Using the model
To run the model after download, use the `enjoy` script corresponding to this environment:
```
python -m .usr.local.lib.python3.8.dist-packages.ipykernel_launcher --algo=APPO --env=doom_health_gathering_supreme --train_dir=./train_dir --experiment=rl_course_vizdoom_health_gathering_supreme
```
You can also upload models to the Hugging Face Hub using the same script with the `--push_to_hub` flag.
See https://www.samplefactory.dev/10-huggingface/huggingface/ for more details
## Training with this model
To continue training with this model, use the `train` script corresponding to this environment:
```
python -m .usr.local.lib.python3.8.dist-packages.ipykernel_launcher --algo=APPO --env=doom_health_gathering_supreme --train_dir=./train_dir --experiment=rl_course_vizdoom_health_gathering_supreme --restart_behavior=resume --train_for_env_steps=10000000000
```
Note, you may have to adjust `--train_for_env_steps` to a suitably high number as the experiment will resume at the number of steps it concluded at.
|
DoyyingFace/bert-asian-hate-tweets-asian-unclean-freeze-4
|
[
"pytorch",
"bert",
"text-classification",
"transformers"
] |
text-classification
|
{
"architectures": [
"BertForSequenceClassification"
],
"model_type": "bert",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 44 | null |
---
license: creativeml-openrail-m
---
https://civitai.com/models/13716/idolmster-hayamikanade-lora
|
DoyyingFace/bert-asian-hate-tweets-asian-unclean-freeze-8
|
[
"pytorch",
"bert",
"text-classification",
"transformers"
] |
text-classification
|
{
"architectures": [
"BertForSequenceClassification"
],
"model_type": "bert",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 30 | null |
---
license: creativeml-openrail-m
---
https://civitai.com/models/13582/nakiri-erina-or-food-wars
|
DoyyingFace/bert-asian-hate-tweets-asian-unclean-slanted
|
[
"pytorch",
"bert",
"text-classification",
"transformers"
] |
text-classification
|
{
"architectures": [
"BertForSequenceClassification"
],
"model_type": "bert",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 29 | null |
---
license: mit
tags:
- generated_from_trainer
metrics:
- accuracy
model-index:
- name: fine-tuned-IndoNLI-Augmented-with-indobert-large-p2
results: []
---
<!-- This model card has been generated automatically according to the information the Trainer had access to. You
should probably proofread and complete it, then remove this comment. -->
# fine-tuned-IndoNLI-Augmented-with-indobert-large-p2
This model is a fine-tuned version of [indobenchmark/indobert-large-p2](https://huggingface.co/indobenchmark/indobert-large-p2) on the None dataset.
It achieves the following results on the evaluation set:
- Loss: 0.9576
- Accuracy: 0.48
## Model description
More information needed
## Intended uses & limitations
More information needed
## Training and evaluation data
More information needed
## Training procedure
### Training hyperparameters
The following hyperparameters were used during training:
- learning_rate: 1e-05
- train_batch_size: 128
- eval_batch_size: 64
- seed: 42
- gradient_accumulation_steps: 4
- total_train_batch_size: 512
- optimizer: Adam with betas=(0.9,0.999) and epsilon=1e-08
- lr_scheduler_type: linear
- lr_scheduler_warmup_ratio: 0.06
- num_epochs: 1
### Training results
| Training Loss | Epoch | Step | Validation Loss | Accuracy |
|:-------------:|:-----:|:----:|:---------------:|:--------:|
| 0.3288 | 1.0 | 1 | 0.9576 | 0.48 |
### Framework versions
- Transformers 4.26.1
- Pytorch 1.13.1+cu117
- Datasets 2.2.0
- Tokenizers 0.13.2
|
DoyyingFace/bert-asian-hate-tweets-asian-unclean-warmup-100
|
[
"pytorch",
"bert",
"text-classification",
"transformers"
] |
text-classification
|
{
"architectures": [
"BertForSequenceClassification"
],
"model_type": "bert",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 28 | null |
---
license: apache-2.0
tags:
- generated_from_keras_callback
model-index:
- name: gritsys/my_awesome_eli5_clm-model
results: []
---
<!-- This model card has been generated automatically according to the information Keras had access to. You should
probably proofread and complete it, then remove this comment. -->
# gritsys/my_awesome_eli5_clm-model
This model is a fine-tuned version of [distilgpt2](https://huggingface.co/distilgpt2) on an unknown dataset.
It achieves the following results on the evaluation set:
- Train Loss: 5.3399
- Validation Loss: 5.5886
- Epoch: 14
## Model description
More information needed
## Intended uses & limitations
More information needed
## Training and evaluation data
More information needed
## Training procedure
### Training hyperparameters
The following hyperparameters were used during training:
- optimizer: {'name': 'AdamWeightDecay', 'learning_rate': 2e-05, 'decay': 0.0, 'beta_1': 0.9, 'beta_2': 0.999, 'epsilon': 1e-07, 'amsgrad': False, 'weight_decay_rate': 0.01}
- training_precision: float32
### Training results
| Train Loss | Validation Loss | Epoch |
|:----------:|:---------------:|:-----:|
| 6.7702 | 6.4295 | 0 |
| 6.3075 | 6.2404 | 1 |
| 6.1358 | 6.1114 | 2 |
| 6.0137 | 6.0240 | 3 |
| 5.9162 | 5.9632 | 4 |
| 5.8324 | 5.8999 | 5 |
| 5.7573 | 5.8411 | 6 |
| 5.6913 | 5.7984 | 7 |
| 5.6306 | 5.7603 | 8 |
| 5.5742 | 5.7290 | 9 |
| 5.5219 | 5.6919 | 10 |
| 5.4724 | 5.6651 | 11 |
| 5.4264 | 5.6356 | 12 |
| 5.3815 | 5.6159 | 13 |
| 5.3399 | 5.5886 | 14 |
### Framework versions
- Transformers 4.26.1
- TensorFlow 2.11.0
- Datasets 2.10.0
- Tokenizers 0.13.2
|
DoyyingFace/bert-asian-hate-tweets-asian-unclean-warmup-25
|
[
"pytorch",
"bert",
"text-classification",
"transformers"
] |
text-classification
|
{
"architectures": [
"BertForSequenceClassification"
],
"model_type": "bert",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 30 | 2023-02-28T06:58:28Z |
---
license: creativeml-openrail-m
---
https://civitai.com/models/13338/amagi-brilliant-park-sento-isuzuor
|
DoyyingFace/bert-asian-hate-tweets-asonam-unclean
|
[
"pytorch",
"bert",
"text-classification",
"transformers"
] |
text-classification
|
{
"architectures": [
"BertForSequenceClassification"
],
"model_type": "bert",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 30 | null |
---
license: creativeml-openrail-m
library_name: diffusers
pipeline_tag: text-to-image
tags:
- stable-diffusion
- aiartchan
---
# xtracolor.v11
[원본글](https://arca.live/b/aiart/70564359)
[civitai](https://civitai.com/models/12622/xtracolorv11)
# Download
- [original 7.7GB](https://civitai.com/api/download/models/14883)
- [safetensors 4.41GB](https://huggingface.co/AIARTCHAN/xtracolor.v11/resolve/main/xtracolor.v11-no-ema.safetensors)
- [safetensors fp16 2.13GB](https://huggingface.co/AIARTCHAN/xtracolor.v11/resolve/main/xtracolor.v11-fp16.safetensors)
추천 설정
프롬: (beautiful detailed glow:1.0~1.1), Steps: 30, Sampler: DPM++ 2M Karras, CFG scale: 9, Size: 512x768 or 768x512, upscaler: latent, Denoising strength: 0.57, Clip skip: 2
파워컬러v1, 니지저니 돚거 로라, 오랜지2, dalcefo 모델 병합한 결과물




|
DoyyingFace/bert-asian-hate-tweets-concat-clean-with-unclean-valid
|
[
"pytorch",
"bert",
"text-classification",
"transformers"
] |
text-classification
|
{
"architectures": [
"BertForSequenceClassification"
],
"model_type": "bert",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 25 | null |
---
tags:
- image-classification
- pytorch
- huggingpics
metrics:
- accuracy
model-index:
- name: Doge
results:
- task:
name: Image Classification
type: image-classification
metrics:
- name: Accuracy
type: accuracy
value: 0.7142857313156128
---
# Doge
Autogenerated by HuggingPics🤗🖼️
Create your own image classifier for **anything** by running [the demo on Google Colab](https://colab.research.google.com/github/nateraw/huggingpics/blob/main/HuggingPics.ipynb).
Report any issues with the demo at the [github repo](https://github.com/nateraw/huggingpics).
## Example Images
#### Doge

#### shiba inu

|
albert-base-v1
|
[
"pytorch",
"tf",
"safetensors",
"albert",
"fill-mask",
"en",
"dataset:bookcorpus",
"dataset:wikipedia",
"arxiv:1909.11942",
"transformers",
"exbert",
"license:apache-2.0",
"autotrain_compatible",
"has_space"
] |
fill-mask
|
{
"architectures": [
"AlbertForMaskedLM"
],
"model_type": "albert",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 38,156 | 2023-02-28T10:54:13Z |
---
tags:
- generated_from_trainer
model-index:
- name: distilbert-base-uncased-ner-invoiceSenderRecipient_clean_inv_28_02
results: []
---
<!-- This model card has been generated automatically according to the information the Trainer had access to. You
should probably proofread and complete it, then remove this comment. -->
# distilbert-base-uncased-ner-invoiceSenderRecipient_clean_inv_28_02
This model was trained from scratch on the None dataset.
It achieves the following results on the evaluation set:
- eval_loss: 0.0266
- eval_precision: 0.9595
- eval_recall: 0.9642
- eval_f1: 0.9618
- eval_accuracy: 0.9957
- eval_runtime: 60.7498
- eval_samples_per_second: 271.474
- eval_steps_per_second: 16.971
- epoch: 9.98
- step: 58000
## Model description
More information needed
## Intended uses & limitations
More information needed
## Training and evaluation data
More information needed
## Training procedure
### Training hyperparameters
The following hyperparameters were used during training:
- learning_rate: 2e-05
- train_batch_size: 16
- eval_batch_size: 16
- seed: 42
- optimizer: Adam with betas=(0.9,0.999) and epsilon=1e-08
- lr_scheduler_type: linear
- num_epochs: 10
- mixed_precision_training: Native AMP
### Framework versions
- Transformers 4.15.0
- Pytorch 1.13.1
- Datasets 2.3.2
- Tokenizers 0.10.3
|
albert-xlarge-v1
|
[
"pytorch",
"tf",
"albert",
"fill-mask",
"en",
"dataset:bookcorpus",
"dataset:wikipedia",
"arxiv:1909.11942",
"transformers",
"license:apache-2.0",
"autotrain_compatible",
"has_space"
] |
fill-mask
|
{
"architectures": [
"AlbertForMaskedLM"
],
"model_type": "albert",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 341 | 2023-02-28T07:25:37Z |
---
language: en
license: apache-2.0
library_name: diffusers
tags: []
datasets: imagefolder
metrics: []
---
<!-- This model card has been generated automatically according to the information the training script had access to. You
should probably proofread and complete it, then remove this comment. -->
# ddpm-pokemons-128_300_epochs_1000_steps_final_Cont
## Model description
This diffusion model is trained with the [🤗 Diffusers](https://github.com/huggingface/diffusers) library
on the `imagefolder` dataset.
## Intended uses & limitations
#### How to use
```python
# TODO: add an example code snippet for running this diffusion pipeline
```
#### Limitations and bias
[TODO: provide examples of latent issues and potential remediations]
## Training data
[TODO: describe the data used to train the model]
### Training hyperparameters
The following hyperparameters were used during training:
- learning_rate: 0.0001
- train_batch_size: 11
- eval_batch_size: 12
- gradient_accumulation_steps: 1
- optimizer: AdamW with betas=(None, None), weight_decay=None and epsilon=None
- lr_scheduler: None
- lr_warmup_steps: 500
- ema_inv_gamma: None
- ema_inv_gamma: None
- ema_inv_gamma: None
- mixed_precision: fp16
### Training results
📈 [TensorBoard logs](https://huggingface.co/Yagorka/ddpm-pokemons-128_300_epochs_1000_steps_final_Cont/tensorboard?#scalars)
|
bert-base-german-cased
|
[
"pytorch",
"tf",
"jax",
"safetensors",
"bert",
"fill-mask",
"de",
"transformers",
"exbert",
"license:mit",
"autotrain_compatible",
"has_space"
] |
fill-mask
|
{
"architectures": [
"BertForMaskedLM"
],
"model_type": "bert",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 175,983 | 2023-02-28T07:37:28Z |
---
tags:
- FrozenLake-v1-4x4-no_slippery
- q-learning
- reinforcement-learning
- custom-implementation
model-index:
- name: q-FrozenLake-v1-4x4-noSlippery
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: FrozenLake-v1-4x4-no_slippery
type: FrozenLake-v1-4x4-no_slippery
metrics:
- type: mean_reward
value: 1.00 +/- 0.00
name: mean_reward
verified: false
---
# **Q-Learning** Agent playing1 **FrozenLake-v1**
This is a trained model of a **Q-Learning** agent playing **FrozenLake-v1** .
## Usage
```python
model = load_from_hub(repo_id="jinukoo/q-FrozenLake-v1-4x4-noSlippery", filename="q-learning.pkl")
# Don't forget to check if you need to add additional attributes (is_slippery=False etc)
env = gym.make(model["env_id"])
```
|
bert-base-german-dbmdz-cased
|
[
"pytorch",
"jax",
"bert",
"fill-mask",
"de",
"transformers",
"license:mit",
"autotrain_compatible",
"has_space"
] |
fill-mask
|
{
"architectures": [
"BertForMaskedLM"
],
"model_type": "bert",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 1,814 | 2023-02-28T07:38:34Z |
---
license: apache-2.0
---
Medium TF-IDF-based model for [pmtrendviz](https://github.com/psaegert/pmtrendviz)
### Training
- Training Samples: 3,000,000
- `n_components`: 250
- `n_clusters`: 250
- `n_gram_range`: (1, 2)
|
bert-base-uncased
|
[
"pytorch",
"tf",
"jax",
"rust",
"safetensors",
"bert",
"fill-mask",
"en",
"dataset:bookcorpus",
"dataset:wikipedia",
"arxiv:1810.04805",
"transformers",
"exbert",
"license:apache-2.0",
"autotrain_compatible",
"has_space"
] |
fill-mask
|
{
"architectures": [
"BertForMaskedLM"
],
"model_type": "bert",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 59,663,489 | 2023-02-28T07:46:10Z |
---
language:
- tr
license: apache-2.0
tags:
- hf-asr-leaderboard
- generated_from_trainer
metrics:
- wer
model-index:
- name: base Turkish Whisper (bTW)
results: []
---
<!-- This model card has been generated automatically according to the information the Trainer had access to. You
should probably proofread and complete it, then remove this comment. -->
# base Turkish Whisper (bTW)
This model is a fine-tuned version of [openai/whisper-base](https://huggingface.co/openai/whisper-base) on the Ermetal Meetings dataset.
It achieves the following results on the evaluation set:
- Loss: 1.8804
- Wer: 2.0146
- Cer: 1.4030
## Model description
More information needed
## Intended uses & limitations
More information needed
## Training and evaluation data
More information needed
## Training procedure
### Training hyperparameters
The following hyperparameters were used during training:
- learning_rate: 1e-05
- train_batch_size: 16
- eval_batch_size: 16
- seed: 42
- gradient_accumulation_steps: 4
- total_train_batch_size: 64
- optimizer: Adam with betas=(0.9,0.999) and epsilon=1e-08
- lr_scheduler_type: linear
- lr_scheduler_warmup_steps: 500
- training_steps: 1000
- mixed_precision_training: Native AMP
### Training results
| Training Loss | Epoch | Step | Validation Loss | Wer | Cer |
|:-------------:|:------:|:----:|:---------------:|:------:|:------:|
| 1.4622 | 16.67 | 100 | 1.5376 | 0.8662 | 0.7357 |
| 0.297 | 33.33 | 200 | 1.2979 | 0.8675 | 0.6481 |
| 0.0163 | 50.0 | 300 | 1.5699 | 1.4066 | 1.0449 |
| 0.0034 | 66.67 | 400 | 1.6919 | 1.6416 | 1.1817 |
| 0.0017 | 83.33 | 500 | 1.7654 | 1.6943 | 1.2587 |
| 0.0011 | 100.0 | 600 | 1.8153 | 1.9908 | 1.4084 |
| 0.0008 | 116.67 | 700 | 1.8455 | 1.9817 | 1.3867 |
| 0.0007 | 133.33 | 800 | 1.8647 | 2.0479 | 1.4215 |
| 0.0006 | 150.0 | 900 | 1.8764 | 2.0489 | 1.4253 |
| 0.0006 | 166.67 | 1000 | 1.8804 | 2.0146 | 1.4030 |
### Framework versions
- Transformers 4.26.0
- Pytorch 1.12.0+cu102
- Datasets 2.9.0
- Tokenizers 0.13.2
|
bert-large-cased-whole-word-masking-finetuned-squad
|
[
"pytorch",
"tf",
"jax",
"rust",
"safetensors",
"bert",
"question-answering",
"en",
"dataset:bookcorpus",
"dataset:wikipedia",
"arxiv:1810.04805",
"transformers",
"license:apache-2.0",
"autotrain_compatible",
"has_space"
] |
question-answering
|
{
"architectures": [
"BertForQuestionAnswering"
],
"model_type": "bert",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 8,214 | 2023-02-28T07:46:42Z |
---
tags:
- Pixelcopter-PLE-v0
- reinforce
- reinforcement-learning
- custom-implementation
- deep-rl-class
model-index:
- name: Reinforce-Pixelcopter-PLE-v0
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: Pixelcopter-PLE-v0
type: Pixelcopter-PLE-v0
metrics:
- type: mean_reward
value: 61.00 +/- 40.97
name: mean_reward
verified: false
---
# **Reinforce** Agent playing **Pixelcopter-PLE-v0**
This is a trained model of a **Reinforce** agent playing **Pixelcopter-PLE-v0** .
To learn to use this model and train yours check Unit 4 of the Deep Reinforcement Learning Course: https://huggingface.co/deep-rl-course/unit4/introduction
|
bert-large-cased
|
[
"pytorch",
"tf",
"jax",
"safetensors",
"bert",
"fill-mask",
"en",
"dataset:bookcorpus",
"dataset:wikipedia",
"arxiv:1810.04805",
"transformers",
"license:apache-2.0",
"autotrain_compatible",
"has_space"
] |
fill-mask
|
{
"architectures": [
"BertForMaskedLM"
],
"model_type": "bert",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 388,769 | 2023-02-28T07:50:59Z |
---
license: mit
tags:
- generated_from_trainer
metrics:
- accuracy
model-index:
- name: fine-tuned-IndoNLI-Basic-with-indobert-large-p2
results: []
---
<!-- This model card has been generated automatically according to the information the Trainer had access to. You
should probably proofread and complete it, then remove this comment. -->
# fine-tuned-IndoNLI-Basic-with-indobert-large-p2
This model is a fine-tuned version of [indobenchmark/indobert-large-p2](https://huggingface.co/indobenchmark/indobert-large-p2) on the None dataset.
It achieves the following results on the evaluation set:
- Loss: 0.6559
- Accuracy: 0.7392
## Model description
More information needed
## Intended uses & limitations
More information needed
## Training and evaluation data
More information needed
## Training procedure
### Training hyperparameters
The following hyperparameters were used during training:
- learning_rate: 3e-05
- train_batch_size: 128
- eval_batch_size: 128
- seed: 42
- gradient_accumulation_steps: 4
- total_train_batch_size: 512
- optimizer: Adam with betas=(0.9,0.999) and epsilon=1e-08
- lr_scheduler_type: linear
- lr_scheduler_warmup_ratio: 0.06
- num_epochs: 4
### Training results
| Training Loss | Epoch | Step | Validation Loss | Accuracy |
|:-------------:|:-----:|:----:|:---------------:|:--------:|
| 0.8412 | 2.49 | 50 | 0.6559 | 0.7392 |
### Framework versions
- Transformers 4.26.1
- Pytorch 1.13.1+cu117
- Datasets 2.2.0
- Tokenizers 0.13.2
|
camembert-base
|
[
"pytorch",
"tf",
"safetensors",
"camembert",
"fill-mask",
"fr",
"dataset:oscar",
"arxiv:1911.03894",
"transformers",
"license:mit",
"autotrain_compatible",
"has_space"
] |
fill-mask
|
{
"architectures": [
"CamembertForMaskedLM"
],
"model_type": "camembert",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 1,440,898 | 2023-02-28T07:52:47Z |
---
tags:
- FrozenLake-v1-4x4-no_slippery
- q-learning
- reinforcement-learning
- custom-implementation
model-index:
- name: q-FrozenLake-v1-4x4-noSlippery
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: FrozenLake-v1-4x4-no_slippery
type: FrozenLake-v1-4x4-no_slippery
metrics:
- type: mean_reward
value: 1.00 +/- 0.00
name: mean_reward
verified: false
---
# **Q-Learning** Agent playing1 **FrozenLake-v1**
This is a trained model of a **Q-Learning** agent playing **FrozenLake-v1** .
## Usage
```python
model = load_from_hub(repo_id="mishall/q-FrozenLake-v1-4x4-noSlippery", filename="q-learning.pkl")
# Don't forget to check if you need to add additional attributes (is_slippery=False etc)
env = gym.make(model["env_id"])
```
|
13048909972/wav2vec2-common_voice-tr-demo
|
[
"pytorch",
"tensorboard",
"wav2vec2",
"automatic-speech-recognition",
"transformers"
] |
automatic-speech-recognition
|
{
"architectures": [
"Wav2Vec2ForCTC"
],
"model_type": "wav2vec2",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 6 | 2023-02-28T09:21:15Z |
---
license: mit
tags:
- generated_from_trainer
model-index:
- name: conversationv11
results: []
---
<!-- This model card has been generated automatically according to the information the Trainer had access to. You
should probably proofread and complete it, then remove this comment. -->
# conversationv11
This model is a fine-tuned version of [gpt2](https://huggingface.co/gpt2) on the None dataset.
## Model description
More information needed
## Intended uses & limitations
More information needed
## Training and evaluation data
More information needed
## Training procedure
### Training hyperparameters
The following hyperparameters were used during training:
- learning_rate: 0.002
- train_batch_size: 28
- eval_batch_size: 28
- seed: 42
- optimizer: Adam with betas=(0.9,0.999) and epsilon=1e-08
- lr_scheduler_type: linear
- num_epochs: 1
### Training results
### Framework versions
- Transformers 4.26.1
- Pytorch 1.13.1+cu116
- Datasets 2.10.0
- Tokenizers 0.13.2
|
AG/pretraining
|
[
"pytorch",
"roberta",
"feature-extraction",
"transformers"
] |
feature-extraction
|
{
"architectures": [
"RobertaModel"
],
"model_type": "roberta",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 2 | 2023-02-28T10:57:25Z |
---
license: creativeml-openrail-m
tags:
- stable-diffusion
- stable-diffusion-diffusers
- text-to-image
- multires_noise
inference: true
---
A model trained with Pyramid Noise - see https://wandb.ai/johnowhitaker/multires_noise/reports/Multi-Resolution-Noise-for-Diffusion-Model-Training--VmlldzozNjYyOTU2 for details
```python
from torch import nn
import random
def pyramid_noise_like(x, discount=0.9):
b, c, w, h = x.shape
u = nn.Upsample(size=(w, h), mode='bilinear')
noise = torch.randn_like(x)
for i in range(6):
r = random.random()*2+2 # Rather than always going 2x,
w, h = max(1, int(w/(r**i))), max(1, int(h/(r**i)))
noise += u(torch.randn(b, c, w, h).to(x)) * discount**i
if w==1 or h==1: break
return noise / noise.std() # Scale back to unit variance
```
To use the mode for inference, just load it like a normal stable diffusion pipeline:
```python
from diffusers import StableDiffusionPipeline
model_path = "pyramid_noise_test_500steps"
pipe = StableDiffusionPipeline.from_pretrained(model_path, torch_dtype=torch.float16)
pipe.to("cuda")
image = pipe(prompt="A black image").images[0]
image
```
|
AI4Sec/cyner-xlm-roberta-large
|
[
"xlm-roberta",
"token-classification",
"transformers",
"license:mit",
"autotrain_compatible"
] |
token-classification
|
{
"architectures": [
"XLMRobertaForTokenClassification"
],
"model_type": "xlm-roberta",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 4 | 2023-02-28T11:11:10Z |
---
tags:
- Pixelcopter-PLE-v0
- reinforce
- reinforcement-learning
- custom-implementation
- deep-rl-class
model-index:
- name: Reinforce-Pixelcopter-PLE-v1
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: Pixelcopter-PLE-v0
type: Pixelcopter-PLE-v0
metrics:
- type: mean_reward
value: 56.10 +/- 53.92
name: mean_reward
verified: false
---
# **Reinforce** Agent playing **Pixelcopter-PLE-v0**
This is a trained model of a **Reinforce** agent playing **Pixelcopter-PLE-v0** .
To learn to use this model and train yours check Unit 4 of the Deep Reinforcement Learning Course: https://huggingface.co/deep-rl-course/unit4/introduction
|
ALaks96/distilbart-cnn-12-6
|
[] | null |
{
"architectures": null,
"model_type": null,
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 0 | 2023-02-28T11:40:02Z |
---
tags:
- generated_from_trainer
metrics:
- rouge
model-index:
- name: finetuned-c2c-large-v2-french-financial-summarization
results: []
---
<!-- This model card has been generated automatically according to the information the Trainer had access to. You
should probably proofread and complete it, then remove this comment. -->
# finetuned-c2c-large-v2-french-financial-summarization
This model is a fine-tuned version of [](https://huggingface.co/) on an unknown dataset.
It achieves the following results on the evaluation set:
- Loss: 2.9625
- Rouge1: 3.9424
- Rouge2: 1.4402
- Rougel: 3.8538
- Rougelsum: 3.8597
- Gen Len: 20.0
- Bertscore: 0.6027
- Bartscore: 0.2850
- Bleurt: -1.4615
- Meteor: 0.0335
- Frugal Score (mover-score): -0.1564
- Frugal Score (bert-score): -0.1564
- Cider: 0.0000
- Infolm Kl Divergence: -2.2213
- Infolm Beta Divergence: 1.5933
- Infolm L1 Distance: 1.3014
- Infolm Fisher Rao Distance: 1.8344
- Baryscore: 0.8888
- Depthscore: 0.1597
## Model description
More information needed
## Intended uses & limitations
More information needed
## Training and evaluation data
More information needed
## Training procedure
### Training hyperparameters
The following hyperparameters were used during training:
- learning_rate: 5e-05
- train_batch_size: 3
- eval_batch_size: 2
- seed: 42
- optimizer: Adam with betas=(0.9,0.999) and epsilon=1e-08
- lr_scheduler_type: linear
- lr_scheduler_warmup_ratio: 0.1
- num_epochs: 10.0
### Training results
| Training Loss | Epoch | Step | Validation Loss | Rouge1 | Rouge2 | Rougel | Rougelsum | Gen Len | Bertscore | Bartscore | Bleurt | Meteor | Frugal Score (mover-score) | Frugal Score (bert-score) | Cider | Infolm Kl Divergence | Infolm Beta Divergence | Infolm L1 Distance | Infolm Fisher Rao Distance | Baryscore | Depthscore |
|:-------------:|:-----:|:----:|:---------------:|:-------:|:------:|:-------:|:---------:|:-------:|:---------:|:---------:|:-------:|:------:|:--------------------------:|:-------------------------:|:------:|:--------------------:|:----------------------:|:------------------:|:--------------------------:|:---------:|:----------:|
| 7.2461 | 1.0 | 388 | 6.0004 | 13.5534 | 0.8186 | 11.1549 | 12.317 | 20.0 | 0.5032 | 0.2059 | -1.6487 | 0.051 | -0.1061 | -0.1061 | 0.0000 | -4.2496 | 3.4389 | 1.718 | 2.3234 | 1.0123 | 0.1974 |
| 5.3001 | 2.0 | 776 | 4.6740 | 0.0 | 0.0 | 0.0 | 0.0 | 20.0 | 0.0 | 0.0188 | -2.0558 | 0.0 | -0.3943 | -0.3943 | 0.0 | -12.2622 | 9.9291 | 1.9747 | 2.9555 | 1.1959 | 0.228 |
| 3.7615 | 3.0 | 1164 | 3.1412 | 6.1663 | 0.7612 | 5.3131 | 5.6586 | 20.0 | 0.6064 | 0.2639 | -1.4925 | 0.0485 | -0.1205 | -0.1205 | 0.0000 | -2.4136 | 1.6327 | 1.3079 | 1.806 | 0.9064 | 0.145 |
| 2.7892 | 4.0 | 1552 | 2.8071 | 4.7883 | 0.3964 | 4.2849 | 4.4915 | 20.0 | 0.5842 | 0.2474 | -1.6118 | 0.0399 | -0.0914 | -0.0914 | 0.0000 | -2.1398 | 1.4455 | 1.2329 | 1.7153 | 0.9776 | 0.1617 |
| 2.2779 | 5.0 | 1940 | 2.7102 | 8.0554 | 0.9509 | 6.7202 | 7.4117 | 20.0 | 0.6047 | 0.2812 | -1.4103 | 0.046 | -0.0653 | -0.0653 | 0.0000 | -2.5871 | 1.6788 | 1.3509 | 1.8921 | 0.8401 | 0.1464 |
| 1.8999 | 6.0 | 2328 | 2.7441 | 10.0201 | 2.0434 | 7.3647 | 8.6123 | 20.0 | 0.6037 | 0.2916 | -1.2633 | 0.0413 | 0.0909 | 0.0909 | 0.0001 | -1.9111 | 1.3589 | 1.2609 | 1.758 | 0.8638 | 0.1275 |
| 1.6073 | 7.0 | 2716 | 2.8099 | 8.9333 | 2.7998 | 6.9169 | 7.4076 | 20.0 | 0.6270 | 0.2978 | -1.3072 | 0.0409 | 0.0581 | 0.0581 | 0.0000 | -1.6652 | 1.1899 | 1.1938 | 1.6453 | 0.838 | 0.1621 |
| 1.3855 | 8.0 | 3104 | 2.8776 | 8.2914 | 0.2152 | 6.532 | 7.2111 | 20.0 | 0.5825 | 0.2509 | -1.3364 | 0.032 | -0.0502 | -0.0502 | 0.0000 | -2.0595 | 1.401 | 1.2423 | 1.7363 | 0.9833 | 0.1658 |
| 1.2104 | 9.0 | 3492 | 2.9408 | 8.248 | 2.4512 | 6.9487 | 7.3166 | 20.0 | 0.6371 | 0.3396 | -1.2883 | 0.0493 | 0.0451 | 0.0451 | 0.0000 | -2.5785 | 1.8569 | 1.3878 | 1.8738 | 0.8128 | 0.1614 |
| 1.096 | 10.0 | 3880 | 2.9625 | 3.9424 | 1.4402 | 3.8538 | 3.8597 | 20.0 | 0.6027 | 0.2850 | -1.4615 | 0.0335 | -0.1564 | -0.1564 | 0.0000 | -2.2213 | 1.5933 | 1.3014 | 1.8344 | 0.8888 | 0.1597 |
### Framework versions
- Transformers 4.26.1
- Pytorch 1.13.1+cu117
- Datasets 2.10.0
- Tokenizers 0.13.2
|
Ab0/keras-dummy-model-mixin-demo
|
[
"keras"
] | null |
{
"architectures": null,
"model_type": null,
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 1 | null |
---
tags:
- unity-ml-agents
- ml-agents
- deep-reinforcement-learning
- reinforcement-learning
- ML-Agents-Huggy
library_name: ml-agents
---
# **ppo** Agent playing **Huggy**
This is a trained model of a **ppo** agent playing **Huggy** using the [Unity ML-Agents Library](https://github.com/Unity-Technologies/ml-agents).
## Usage (with ML-Agents)
The Documentation: https://github.com/huggingface/ml-agents#get-started
We wrote a complete tutorial to learn to train your first agent using ML-Agents and publish it to the Hub:
### Resume the training
```
mlagents-learn <your_configuration_file_path.yaml> --run-id=<run_id> --resume
```
### Watch your Agent play
You can watch your agent **playing directly in your browser:**.
1. Go to https://huggingface.co/spaces/unity/ML-Agents-Huggy
2. Step 1: Write your model_id: haidlir/HF-Huggy-PPO
3. Step 2: Select your *.nn /*.onnx file
4. Click on Watch the agent play 👀
|
Abab/Test_Albert
|
[] | null |
{
"architectures": null,
"model_type": null,
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 0 | null |
---
library_name: stable-baselines3
tags:
- PandaSlide-v1
- deep-reinforcement-learning
- reinforcement-learning
- stable-baselines3
model-index:
- name: TQC
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: PandaSlide-v1
type: PandaSlide-v1
metrics:
- type: mean_reward
value: -22.90 +/- 11.41
name: mean_reward
verified: false
---
# **TQC** Agent playing **PandaSlide-v1**
This is a trained model of a **TQC** agent playing **PandaSlide-v1**
using the [stable-baselines3 library](https://github.com/DLR-RM/stable-baselines3)
and the [RL Zoo](https://github.com/DLR-RM/rl-baselines3-zoo).
The RL Zoo is a training framework for Stable Baselines3
reinforcement learning agents,
with hyperparameter optimization and pre-trained agents included.
## Usage (with SB3 RL Zoo)
RL Zoo: https://github.com/DLR-RM/rl-baselines3-zoo<br/>
SB3: https://github.com/DLR-RM/stable-baselines3<br/>
SB3 Contrib: https://github.com/Stable-Baselines-Team/stable-baselines3-contrib
Install the RL Zoo (with SB3 and SB3-Contrib):
```bash
pip install rl_zoo3
```
```
# Download model and save it into the logs/ folder
python -m rl_zoo3.load_from_hub --algo tqc --env PandaSlide-v1 -orga qgallouedec -f logs/
python -m rl_zoo3.enjoy --algo tqc --env PandaSlide-v1 -f logs/
```
If you installed the RL Zoo3 via pip (`pip install rl_zoo3`), from anywhere you can do:
```
python -m rl_zoo3.load_from_hub --algo tqc --env PandaSlide-v1 -orga qgallouedec -f logs/
python -m rl_zoo3.enjoy --algo tqc --env PandaSlide-v1 -f logs/
```
## Training (with the RL Zoo)
```
python -m rl_zoo3.train --algo tqc --env PandaSlide-v1 -f logs/
# Upload the model and generate video (when possible)
python -m rl_zoo3.push_to_hub --algo tqc --env PandaSlide-v1 -f logs/ -orga qgallouedec
```
## Hyperparameters
```python
OrderedDict([('batch_size', 2048),
('buffer_size', 1000000),
('env_wrapper', 'sb3_contrib.common.wrappers.TimeFeatureWrapper'),
('gamma', 0.95),
('learning_rate', 0.001),
('n_timesteps', 3000000.0),
('policy', 'MultiInputPolicy'),
('policy_kwargs', 'dict(net_arch=[512, 512, 512], n_critics=2)'),
('replay_buffer_class', 'HerReplayBuffer'),
('replay_buffer_kwargs',
"dict( online_sampling=True, goal_selection_strategy='future', "
'n_sampled_goal=4, )'),
('tau', 0.05),
('normalize', False)])
```
# Environment Arguments
```python
{'render': True}
```
|
AdapterHub/bert-base-uncased-pf-quoref
|
[
"bert",
"en",
"dataset:quoref",
"arxiv:2104.08247",
"adapter-transformers",
"question-answering"
] |
question-answering
|
{
"architectures": null,
"model_type": "bert",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 6 | null |
---
license: creativeml-openrail-m
tags:
- stable-diffusion
- stable-diffusion-diffusers
- text-to-image
inference: true
extra_gated_prompt: >-
This model is open access and available to all, with a CreativeML OpenRAIL-M
license further specifying rights and usage.
The CreativeML OpenRAIL License specifies:
1. You can't use the model to deliberately produce nor share illegal or
harmful outputs or content
2. CompVis claims no rights on the outputs you generate, you are free to use
them and are accountable for their use which must not go against the
provisions set in the license
3. You may re-distribute the weights and use the model commercially and/or as
a service. If you do, please be aware you have to include the same use
restrictions as the ones in the license and share a copy of the CreativeML
OpenRAIL-M to all your users (please read the license entirely and carefully)
Please read the full license carefully here:
https://huggingface.co/spaces/CompVis/stable-diffusion-license
extra_gated_heading: Please read the LICENSE to access this model
pipeline_tag: text-to-image
---
# Stable Diffusion v1-5 Model Card
Stable Diffusion is a latent text-to-image diffusion model capable of generating photo-realistic images given any text input.
For more information about how Stable Diffusion functions, please have a look at [🤗's Stable Diffusion blog](https://huggingface.co/blog/stable_diffusion).
The **Stable-Diffusion-v1-5** checkpoint was initialized with the weights of the [Stable-Diffusion-v1-2](https:/steps/huggingface.co/CompVis/stable-diffusion-v1-2)
checkpoint and subsequently fine-tuned on 595k steps at resolution 512x512 on "laion-aesthetics v2 5+" and 10% dropping of the text-conditioning to improve [classifier-free guidance sampling](https://arxiv.org/abs/2207.12598).
You can use this both with the [🧨Diffusers library](https://github.com/huggingface/diffusers) and the [RunwayML GitHub repository](https://github.com/runwayml/stable-diffusion).
### Diffusers
```py
from diffusers import StableDiffusionPipeline
import torch
model_id = "runwayml/stable-diffusion-v1-5"
pipe = StableDiffusionPipeline.from_pretrained(model_id, torch_dtype=torch.float16)
pipe = pipe.to("cuda")
prompt = "a photo of an astronaut riding a horse on mars"
image = pipe(prompt).images[0]
image.save("astronaut_rides_horse.png")
```
For more detailed instructions, use-cases and examples in JAX follow the instructions [here](https://github.com/huggingface/diffusers#text-to-image-generation-with-stable-diffusion)
### Original GitHub Repository
1. Download the weights
- [v1-5-pruned-emaonly.ckpt](https://huggingface.co/runwayml/stable-diffusion-v1-5/resolve/main/v1-5-pruned-emaonly.ckpt) - 4.27GB, ema-only weight. uses less VRAM - suitable for inference
- [v1-5-pruned.ckpt](https://huggingface.co/runwayml/stable-diffusion-v1-5/resolve/main/v1-5-pruned.ckpt) - 7.7GB, ema+non-ema weights. uses more VRAM - suitable for fine-tuning
2. Follow instructions [here](https://github.com/runwayml/stable-diffusion).
## Model Details
- **Developed by:** Robin Rombach, Patrick Esser
- **Model type:** Diffusion-based text-to-image generation model
- **Language(s):** English
- **License:** [The CreativeML OpenRAIL M license](https://huggingface.co/spaces/CompVis/stable-diffusion-license) is an [Open RAIL M license](https://www.licenses.ai/blog/2022/8/18/naming-convention-of-responsible-ai-licenses), adapted from the work that [BigScience](https://bigscience.huggingface.co/) and [the RAIL Initiative](https://www.licenses.ai/) are jointly carrying in the area of responsible AI licensing. See also [the article about the BLOOM Open RAIL license](https://bigscience.huggingface.co/blog/the-bigscience-rail-license) on which our license is based.
- **Model Description:** This is a model that can be used to generate and modify images based on text prompts. It is a [Latent Diffusion Model](https://arxiv.org/abs/2112.10752) that uses a fixed, pretrained text encoder ([CLIP ViT-L/14](https://arxiv.org/abs/2103.00020)) as suggested in the [Imagen paper](https://arxiv.org/abs/2205.11487).
- **Resources for more information:** [GitHub Repository](https://github.com/CompVis/stable-diffusion), [Paper](https://arxiv.org/abs/2112.10752).
- **Cite as:**
@InProceedings{Rombach_2022_CVPR,
author = {Rombach, Robin and Blattmann, Andreas and Lorenz, Dominik and Esser, Patrick and Ommer, Bj\"orn},
title = {High-Resolution Image Synthesis With Latent Diffusion Models},
booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)},
month = {June},
year = {2022},
pages = {10684-10695}
}
# Uses
## Direct Use
The model is intended for research purposes only. Possible research areas and
tasks include
- Safe deployment of models which have the potential to generate harmful content.
- Probing and understanding the limitations and biases of generative models.
- Generation of artworks and use in design and other artistic processes.
- Applications in educational or creative tools.
- Research on generative models.
Excluded uses are described below.
### Misuse, Malicious Use, and Out-of-Scope Use
_Note: This section is taken from the [DALLE-MINI model card](https://huggingface.co/dalle-mini/dalle-mini), but applies in the same way to Stable Diffusion v1_.
The model should not be used to intentionally create or disseminate images that create hostile or alienating environments for people. This includes generating images that people would foreseeably find disturbing, distressing, or offensive; or content that propagates historical or current stereotypes.
#### Out-of-Scope Use
The model was not trained to be factual or true representations of people or events, and therefore using the model to generate such content is out-of-scope for the abilities of this model.
#### Misuse and Malicious Use
Using the model to generate content that is cruel to individuals is a misuse of this model. This includes, but is not limited to:
- Generating demeaning, dehumanizing, or otherwise harmful representations of people or their environments, cultures, religions, etc.
- Intentionally promoting or propagating discriminatory content or harmful stereotypes.
- Impersonating individuals without their consent.
- Sexual content without consent of the people who might see it.
- Mis- and disinformation
- Representations of egregious violence and gore
- Sharing of copyrighted or licensed material in violation of its terms of use.
- Sharing content that is an alteration of copyrighted or licensed material in violation of its terms of use.
## Limitations and Bias
### Limitations
- The model does not achieve perfect photorealism
- The model cannot render legible text
- The model does not perform well on more difficult tasks which involve compositionality, such as rendering an image corresponding to “A red cube on top of a blue sphere”
- Faces and people in general may not be generated properly.
- The model was trained mainly with English captions and will not work as well in other languages.
- The autoencoding part of the model is lossy
- The model was trained on a large-scale dataset
[LAION-5B](https://laion.ai/blog/laion-5b/) which contains adult material
and is not fit for product use without additional safety mechanisms and
considerations.
- No additional measures were used to deduplicate the dataset. As a result, we observe some degree of memorization for images that are duplicated in the training data.
The training data can be searched at [https://rom1504.github.io/clip-retrieval/](https://rom1504.github.io/clip-retrieval/) to possibly assist in the detection of memorized images.
### Bias
While the capabilities of image generation models are impressive, they can also reinforce or exacerbate social biases.
Stable Diffusion v1 was trained on subsets of [LAION-2B(en)](https://laion.ai/blog/laion-5b/),
which consists of images that are primarily limited to English descriptions.
Texts and images from communities and cultures that use other languages are likely to be insufficiently accounted for.
This affects the overall output of the model, as white and western cultures are often set as the default. Further, the
ability of the model to generate content with non-English prompts is significantly worse than with English-language prompts.
### Safety Module
The intended use of this model is with the [Safety Checker](https://github.com/huggingface/diffusers/blob/main/src/diffusers/pipelines/stable_diffusion/safety_checker.py) in Diffusers.
This checker works by checking model outputs against known hard-coded NSFW concepts.
The concepts are intentionally hidden to reduce the likelihood of reverse-engineering this filter.
Specifically, the checker compares the class probability of harmful concepts in the embedding space of the `CLIPTextModel` *after generation* of the images.
The concepts are passed into the model with the generated image and compared to a hand-engineered weight for each NSFW concept.
## Training
**Training Data**
The model developers used the following dataset for training the model:
- LAION-2B (en) and subsets thereof (see next section)
**Training Procedure**
Stable Diffusion v1-5 is a latent diffusion model which combines an autoencoder with a diffusion model that is trained in the latent space of the autoencoder. During training,
- Images are encoded through an encoder, which turns images into latent representations. The autoencoder uses a relative downsampling factor of 8 and maps images of shape H x W x 3 to latents of shape H/f x W/f x 4
- Text prompts are encoded through a ViT-L/14 text-encoder.
- The non-pooled output of the text encoder is fed into the UNet backbone of the latent diffusion model via cross-attention.
- The loss is a reconstruction objective between the noise that was added to the latent and the prediction made by the UNet.
Currently six Stable Diffusion checkpoints are provided, which were trained as follows.
- [`stable-diffusion-v1-1`](https://huggingface.co/CompVis/stable-diffusion-v1-1): 237,000 steps at resolution `256x256` on [laion2B-en](https://huggingface.co/datasets/laion/laion2B-en).
194,000 steps at resolution `512x512` on [laion-high-resolution](https://huggingface.co/datasets/laion/laion-high-resolution) (170M examples from LAION-5B with resolution `>= 1024x1024`).
- [`stable-diffusion-v1-2`](https://huggingface.co/CompVis/stable-diffusion-v1-2): Resumed from `stable-diffusion-v1-1`.
515,000 steps at resolution `512x512` on "laion-improved-aesthetics" (a subset of laion2B-en,
filtered to images with an original size `>= 512x512`, estimated aesthetics score `> 5.0`, and an estimated watermark probability `< 0.5`. The watermark estimate is from the LAION-5B metadata, the aesthetics score is estimated using an [improved aesthetics estimator](https://github.com/christophschuhmann/improved-aesthetic-predictor)).
- [`stable-diffusion-v1-3`](https://huggingface.co/CompVis/stable-diffusion-v1-3): Resumed from `stable-diffusion-v1-2` - 195,000 steps at resolution `512x512` on "laion-improved-aesthetics" and 10 % dropping of the text-conditioning to improve [classifier-free guidance sampling](https://arxiv.org/abs/2207.12598).
- [`stable-diffusion-v1-4`](https://huggingface.co/CompVis/stable-diffusion-v1-4) Resumed from `stable-diffusion-v1-2` - 225,000 steps at resolution `512x512` on "laion-aesthetics v2 5+" and 10 % dropping of the text-conditioning to improve [classifier-free guidance sampling](https://arxiv.org/abs/2207.12598).
- [`stable-diffusion-v1-5`](https://huggingface.co/runwayml/stable-diffusion-v1-5) Resumed from `stable-diffusion-v1-2` - 595,000 steps at resolution `512x512` on "laion-aesthetics v2 5+" and 10 % dropping of the text-conditioning to improve [classifier-free guidance sampling](https://arxiv.org/abs/2207.12598).
- [`stable-diffusion-inpainting`](https://huggingface.co/runwayml/stable-diffusion-inpainting) Resumed from `stable-diffusion-v1-5` - then 440,000 steps of inpainting training at resolution 512x512 on “laion-aesthetics v2 5+” and 10% dropping of the text-conditioning. For inpainting, the UNet has 5 additional input channels (4 for the encoded masked-image and 1 for the mask itself) whose weights were zero-initialized after restoring the non-inpainting checkpoint. During training, we generate synthetic masks and in 25% mask everything.
- **Hardware:** 32 x 8 x A100 GPUs
- **Optimizer:** AdamW
- **Gradient Accumulations**: 2
- **Batch:** 32 x 8 x 2 x 4 = 2048
- **Learning rate:** warmup to 0.0001 for 10,000 steps and then kept constant
## Evaluation Results
Evaluations with different classifier-free guidance scales (1.5, 2.0, 3.0, 4.0,
5.0, 6.0, 7.0, 8.0) and 50 PNDM/PLMS sampling
steps show the relative improvements of the checkpoints:
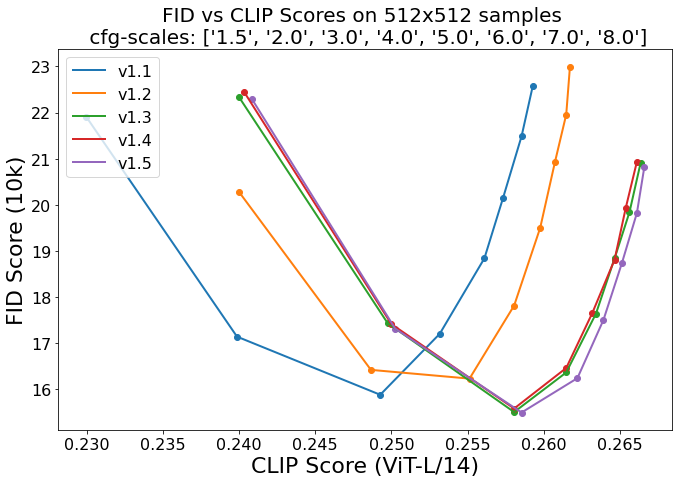
Evaluated using 50 PLMS steps and 10000 random prompts from the COCO2017 validation set, evaluated at 512x512 resolution. Not optimized for FID scores.
## Environmental Impact
**Stable Diffusion v1** **Estimated Emissions**
Based on that information, we estimate the following CO2 emissions using the [Machine Learning Impact calculator](https://mlco2.github.io/impact#compute) presented in [Lacoste et al. (2019)](https://arxiv.org/abs/1910.09700). The hardware, runtime, cloud provider, and compute region were utilized to estimate the carbon impact.
- **Hardware Type:** A100 PCIe 40GB
- **Hours used:** 150000
- **Cloud Provider:** AWS
- **Compute Region:** US-east
- **Carbon Emitted (Power consumption x Time x Carbon produced based on location of power grid):** 11250 kg CO2 eq.
## Citation
```bibtex
@InProceedings{Rombach_2022_CVPR,
author = {Rombach, Robin and Blattmann, Andreas and Lorenz, Dominik and Esser, Patrick and Ommer, Bj\"orn},
title = {High-Resolution Image Synthesis With Latent Diffusion Models},
booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)},
month = {June},
year = {2022},
pages = {10684-10695}
}
```
*This model card was written by: Robin Rombach and Patrick Esser and is based on the [DALL-E Mini model card](https://huggingface.co/dalle-mini/dalle-mini).*
|
AdapterHub/bert-base-uncased-pf-scicite
|
[
"bert",
"en",
"dataset:scicite",
"arxiv:2104.08247",
"adapter-transformers",
"text-classification"
] |
text-classification
|
{
"architectures": null,
"model_type": "bert",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 0 | null |
---
tags:
- Taxi-v3
- q-learning
- reinforcement-learning
- custom-implementation
model-index:
- name: Taxi-v3
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: Taxi-v3
type: Taxi-v3
metrics:
- type: mean_reward
value: 7.48 +/- 2.75
name: mean_reward
verified: false
---
# **Q-Learning** Agent playing1 **Taxi-v3**
This is a trained model of a **Q-Learning** agent playing **Taxi-v3** .
## Usage
```python
model = load_from_hub(repo_id="Isaacgv/Taxi-v3", filename="q-learning.pkl")
# Don't forget to check if you need to add additional attributes (is_slippery=False etc)
env = gym.make(model["env_id"])
```
|
AdapterHub/roberta-base-pf-quartz
|
[
"roberta",
"en",
"dataset:quartz",
"arxiv:2104.08247",
"adapter-transformers"
] | null |
{
"architectures": null,
"model_type": "roberta",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 1 | 2023-02-28T14:40:44Z |
---
library_name: stable-baselines3
tags:
- InvertedPendulum-v2
- deep-reinforcement-learning
- reinforcement-learning
- stable-baselines3
model-index:
- name: PPO
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: InvertedPendulum-v2
type: InvertedPendulum-v2
metrics:
- type: mean_reward
value: 11.20 +/- 0.98
name: mean_reward
verified: false
---
# **PPO** Agent playing **InvertedPendulum-v2**
This is a trained model of a **PPO** agent playing **InvertedPendulum-v2**
using the [stable-baselines3 library](https://github.com/DLR-RM/stable-baselines3)
and the [RL Zoo](https://github.com/DLR-RM/rl-baselines3-zoo).
The RL Zoo is a training framework for Stable Baselines3
reinforcement learning agents,
with hyperparameter optimization and pre-trained agents included.
## Usage (with SB3 RL Zoo)
RL Zoo: https://github.com/DLR-RM/rl-baselines3-zoo<br/>
SB3: https://github.com/DLR-RM/stable-baselines3<br/>
SB3 Contrib: https://github.com/Stable-Baselines-Team/stable-baselines3-contrib
Install the RL Zoo (with SB3 and SB3-Contrib):
```bash
pip install rl_zoo3
```
```
# Download model and save it into the logs/ folder
python -m rl_zoo3.load_from_hub --algo ppo --env InvertedPendulum-v2 -orga qgallouedec -f logs/
python -m rl_zoo3.enjoy --algo ppo --env InvertedPendulum-v2 -f logs/
```
If you installed the RL Zoo3 via pip (`pip install rl_zoo3`), from anywhere you can do:
```
python -m rl_zoo3.load_from_hub --algo ppo --env InvertedPendulum-v2 -orga qgallouedec -f logs/
python -m rl_zoo3.enjoy --algo ppo --env InvertedPendulum-v2 -f logs/
```
## Training (with the RL Zoo)
```
python -m rl_zoo3.train --algo ppo --env InvertedPendulum-v2 -f logs/
# Upload the model and generate video (when possible)
python -m rl_zoo3.push_to_hub --algo ppo --env InvertedPendulum-v2 -f logs/ -orga qgallouedec
```
## Hyperparameters
```python
OrderedDict([('batch_size', 64),
('clip_range', 0.4),
('ent_coef', 1.37976e-07),
('gae_lambda', 0.9),
('gamma', 0.999),
('learning_rate', 0.000222425),
('max_grad_norm', 0.3),
('n_envs', 1),
('n_epochs', 5),
('n_steps', 32),
('n_timesteps', 1000000.0),
('normalize', True),
('policy', 'MlpPolicy'),
('vf_coef', 0.19816),
('normalize_kwargs', {'norm_obs': True, 'norm_reward': False})])
```
|
AdapterHub/roberta-base-pf-rte
|
[
"roberta",
"en",
"arxiv:2104.08247",
"adapter-transformers",
"text-classification",
"adapterhub:nli/rte"
] |
text-classification
|
{
"architectures": null,
"model_type": "roberta",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 6 | null |
---
library_name: stable-baselines3
tags:
- HumanoidStandup-v2
- deep-reinforcement-learning
- reinforcement-learning
- stable-baselines3
model-index:
- name: PPO
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: HumanoidStandup-v2
type: HumanoidStandup-v2
metrics:
- type: mean_reward
value: 134333.51 +/- 35272.68
name: mean_reward
verified: false
---
# **PPO** Agent playing **HumanoidStandup-v2**
This is a trained model of a **PPO** agent playing **HumanoidStandup-v2**
using the [stable-baselines3 library](https://github.com/DLR-RM/stable-baselines3)
and the [RL Zoo](https://github.com/DLR-RM/rl-baselines3-zoo).
The RL Zoo is a training framework for Stable Baselines3
reinforcement learning agents,
with hyperparameter optimization and pre-trained agents included.
## Usage (with SB3 RL Zoo)
RL Zoo: https://github.com/DLR-RM/rl-baselines3-zoo<br/>
SB3: https://github.com/DLR-RM/stable-baselines3<br/>
SB3 Contrib: https://github.com/Stable-Baselines-Team/stable-baselines3-contrib
Install the RL Zoo (with SB3 and SB3-Contrib):
```bash
pip install rl_zoo3
```
```
# Download model and save it into the logs/ folder
python -m rl_zoo3.load_from_hub --algo ppo --env HumanoidStandup-v2 -orga qgallouedec -f logs/
python -m rl_zoo3.enjoy --algo ppo --env HumanoidStandup-v2 -f logs/
```
If you installed the RL Zoo3 via pip (`pip install rl_zoo3`), from anywhere you can do:
```
python -m rl_zoo3.load_from_hub --algo ppo --env HumanoidStandup-v2 -orga qgallouedec -f logs/
python -m rl_zoo3.enjoy --algo ppo --env HumanoidStandup-v2 -f logs/
```
## Training (with the RL Zoo)
```
python -m rl_zoo3.train --algo ppo --env HumanoidStandup-v2 -f logs/
# Upload the model and generate video (when possible)
python -m rl_zoo3.push_to_hub --algo ppo --env HumanoidStandup-v2 -f logs/ -orga qgallouedec
```
## Hyperparameters
```python
OrderedDict([('batch_size', 32),
('clip_range', 0.3),
('ent_coef', 3.62109e-06),
('gae_lambda', 0.9),
('gamma', 0.99),
('learning_rate', 2.55673e-05),
('max_grad_norm', 0.7),
('n_envs', 1),
('n_epochs', 20),
('n_steps', 512),
('n_timesteps', 10000000.0),
('normalize', True),
('policy', 'MlpPolicy'),
('policy_kwargs',
'dict( log_std_init=-2, ortho_init=False, activation_fn=nn.ReLU, '
'net_arch=dict(pi=[256, 256], vf=[256, 256]) )'),
('vf_coef', 0.430793),
('normalize_kwargs', {'norm_obs': True, 'norm_reward': False})])
```
|
Ahda/M
|
[] | null |
{
"architectures": null,
"model_type": null,
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 0 | null |
---
library_name: stable-baselines3
tags:
- HalfCheetah-v3
- deep-reinforcement-learning
- reinforcement-learning
- stable-baselines3
model-index:
- name: TQC
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: HalfCheetah-v3
type: HalfCheetah-v3
metrics:
- type: mean_reward
value: 11949.73 +/- 404.98
name: mean_reward
verified: false
---
# **TQC** Agent playing **HalfCheetah-v3**
This is a trained model of a **TQC** agent playing **HalfCheetah-v3**
using the [stable-baselines3 library](https://github.com/DLR-RM/stable-baselines3)
and the [RL Zoo](https://github.com/DLR-RM/rl-baselines3-zoo).
The RL Zoo is a training framework for Stable Baselines3
reinforcement learning agents,
with hyperparameter optimization and pre-trained agents included.
## Usage (with SB3 RL Zoo)
RL Zoo: https://github.com/DLR-RM/rl-baselines3-zoo<br/>
SB3: https://github.com/DLR-RM/stable-baselines3<br/>
SB3 Contrib: https://github.com/Stable-Baselines-Team/stable-baselines3-contrib
Install the RL Zoo (with SB3 and SB3-Contrib):
```bash
pip install rl_zoo3
```
```
# Download model and save it into the logs/ folder
python -m rl_zoo3.load_from_hub --algo tqc --env HalfCheetah-v3 -orga qgallouedec -f logs/
python -m rl_zoo3.enjoy --algo tqc --env HalfCheetah-v3 -f logs/
```
If you installed the RL Zoo3 via pip (`pip install rl_zoo3`), from anywhere you can do:
```
python -m rl_zoo3.load_from_hub --algo tqc --env HalfCheetah-v3 -orga qgallouedec -f logs/
python -m rl_zoo3.enjoy --algo tqc --env HalfCheetah-v3 -f logs/
```
## Training (with the RL Zoo)
```
python -m rl_zoo3.train --algo tqc --env HalfCheetah-v3 -f logs/
# Upload the model and generate video (when possible)
python -m rl_zoo3.push_to_hub --algo tqc --env HalfCheetah-v3 -f logs/ -orga qgallouedec
```
## Hyperparameters
```python
OrderedDict([('learning_starts', 10000),
('n_timesteps', 1000000.0),
('policy', 'MlpPolicy'),
('normalize', False)])
```
|
Ajaykannan6/autonlp-manthan-16122692
|
[
"pytorch",
"bart",
"text2text-generation",
"unk",
"dataset:Ajaykannan6/autonlp-data-manthan",
"transformers",
"autonlp",
"autotrain_compatible"
] |
text2text-generation
|
{
"architectures": [
"BartForConditionalGeneration"
],
"model_type": "bart",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": true,
"length_penalty": 2,
"max_length": 142,
"min_length": 56,
"no_repeat_ngram_size": 3,
"num_beams": 4,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 4 | null |
---
library_name: stable-baselines3
tags:
- HalfCheetah-v3
- deep-reinforcement-learning
- reinforcement-learning
- stable-baselines3
model-index:
- name: TRPO
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: HalfCheetah-v3
type: HalfCheetah-v3
metrics:
- type: mean_reward
value: 1160.81 +/- 18.74
name: mean_reward
verified: false
---
# **TRPO** Agent playing **HalfCheetah-v3**
This is a trained model of a **TRPO** agent playing **HalfCheetah-v3**
using the [stable-baselines3 library](https://github.com/DLR-RM/stable-baselines3)
and the [RL Zoo](https://github.com/DLR-RM/rl-baselines3-zoo).
The RL Zoo is a training framework for Stable Baselines3
reinforcement learning agents,
with hyperparameter optimization and pre-trained agents included.
## Usage (with SB3 RL Zoo)
RL Zoo: https://github.com/DLR-RM/rl-baselines3-zoo<br/>
SB3: https://github.com/DLR-RM/stable-baselines3<br/>
SB3 Contrib: https://github.com/Stable-Baselines-Team/stable-baselines3-contrib
Install the RL Zoo (with SB3 and SB3-Contrib):
```bash
pip install rl_zoo3
```
```
# Download model and save it into the logs/ folder
python -m rl_zoo3.load_from_hub --algo trpo --env HalfCheetah-v3 -orga qgallouedec -f logs/
python -m rl_zoo3.enjoy --algo trpo --env HalfCheetah-v3 -f logs/
```
If you installed the RL Zoo3 via pip (`pip install rl_zoo3`), from anywhere you can do:
```
python -m rl_zoo3.load_from_hub --algo trpo --env HalfCheetah-v3 -orga qgallouedec -f logs/
python -m rl_zoo3.enjoy --algo trpo --env HalfCheetah-v3 -f logs/
```
## Training (with the RL Zoo)
```
python -m rl_zoo3.train --algo trpo --env HalfCheetah-v3 -f logs/
# Upload the model and generate video (when possible)
python -m rl_zoo3.push_to_hub --algo trpo --env HalfCheetah-v3 -f logs/ -orga qgallouedec
```
## Hyperparameters
```python
OrderedDict([('batch_size', 128),
('cg_damping', 0.1),
('cg_max_steps', 25),
('gae_lambda', 0.95),
('gamma', 0.99),
('learning_rate', 0.001),
('n_critic_updates', 20),
('n_envs', 2),
('n_steps', 1024),
('n_timesteps', 1000000.0),
('normalize', True),
('policy', 'MlpPolicy'),
('sub_sampling_factor', 1),
('target_kl', 0.04),
('normalize_kwargs', {'norm_obs': True, 'norm_reward': False})])
```
|
Akashpb13/xlsr_hungarian_new
|
[
"pytorch",
"wav2vec2",
"automatic-speech-recognition",
"hu",
"dataset:mozilla-foundation/common_voice_8_0",
"transformers",
"generated_from_trainer",
"hf-asr-leaderboard",
"model_for_talk",
"mozilla-foundation/common_voice_8_0",
"robust-speech-event",
"license:apache-2.0",
"model-index"
] |
automatic-speech-recognition
|
{
"architectures": [
"Wav2Vec2ForCTC"
],
"model_type": "wav2vec2",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 7 | null |
---
library_name: stable-baselines3
tags:
- Humanoid-v3
- deep-reinforcement-learning
- reinforcement-learning
- stable-baselines3
model-index:
- name: TRPO
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: Humanoid-v3
type: Humanoid-v3
metrics:
- type: mean_reward
value: 2081.02 +/- 972.33
name: mean_reward
verified: false
---
# **TRPO** Agent playing **Humanoid-v3**
This is a trained model of a **TRPO** agent playing **Humanoid-v3**
using the [stable-baselines3 library](https://github.com/DLR-RM/stable-baselines3)
and the [RL Zoo](https://github.com/DLR-RM/rl-baselines3-zoo).
The RL Zoo is a training framework for Stable Baselines3
reinforcement learning agents,
with hyperparameter optimization and pre-trained agents included.
## Usage (with SB3 RL Zoo)
RL Zoo: https://github.com/DLR-RM/rl-baselines3-zoo<br/>
SB3: https://github.com/DLR-RM/stable-baselines3<br/>
SB3 Contrib: https://github.com/Stable-Baselines-Team/stable-baselines3-contrib
Install the RL Zoo (with SB3 and SB3-Contrib):
```bash
pip install rl_zoo3
```
```
# Download model and save it into the logs/ folder
python -m rl_zoo3.load_from_hub --algo trpo --env Humanoid-v3 -orga qgallouedec -f logs/
python -m rl_zoo3.enjoy --algo trpo --env Humanoid-v3 -f logs/
```
If you installed the RL Zoo3 via pip (`pip install rl_zoo3`), from anywhere you can do:
```
python -m rl_zoo3.load_from_hub --algo trpo --env Humanoid-v3 -orga qgallouedec -f logs/
python -m rl_zoo3.enjoy --algo trpo --env Humanoid-v3 -f logs/
```
## Training (with the RL Zoo)
```
python -m rl_zoo3.train --algo trpo --env Humanoid-v3 -f logs/
# Upload the model and generate video (when possible)
python -m rl_zoo3.push_to_hub --algo trpo --env Humanoid-v3 -f logs/ -orga qgallouedec
```
## Hyperparameters
```python
OrderedDict([('batch_size', 128),
('cg_damping', 0.1),
('cg_max_steps', 25),
('gae_lambda', 0.95),
('gamma', 0.99),
('learning_rate', 0.001),
('n_critic_updates', 20),
('n_envs', 2),
('n_steps', 1024),
('n_timesteps', 2000000.0),
('normalize', True),
('policy', 'MlpPolicy'),
('sub_sampling_factor', 1),
('normalize_kwargs', {'norm_obs': True, 'norm_reward': False})])
```
|
Akashpb13/xlsr_kurmanji_kurdish
|
[
"pytorch",
"safetensors",
"wav2vec2",
"automatic-speech-recognition",
"kmr",
"ku",
"dataset:mozilla-foundation/common_voice_8_0",
"transformers",
"mozilla-foundation/common_voice_8_0",
"generated_from_trainer",
"robust-speech-event",
"model_for_talk",
"hf-asr-leaderboard",
"license:apache-2.0",
"model-index"
] |
automatic-speech-recognition
|
{
"architectures": [
"Wav2Vec2ForCTC"
],
"model_type": "wav2vec2",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 10 | null |
---
library_name: stable-baselines3
tags:
- Humanoid-v3
- deep-reinforcement-learning
- reinforcement-learning
- stable-baselines3
model-index:
- name: TRPO
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: Humanoid-v3
type: Humanoid-v3
metrics:
- type: mean_reward
value: 1124.02 +/- 306.88
name: mean_reward
verified: false
---
# **TRPO** Agent playing **Humanoid-v3**
This is a trained model of a **TRPO** agent playing **Humanoid-v3**
using the [stable-baselines3 library](https://github.com/DLR-RM/stable-baselines3)
and the [RL Zoo](https://github.com/DLR-RM/rl-baselines3-zoo).
The RL Zoo is a training framework for Stable Baselines3
reinforcement learning agents,
with hyperparameter optimization and pre-trained agents included.
## Usage (with SB3 RL Zoo)
RL Zoo: https://github.com/DLR-RM/rl-baselines3-zoo<br/>
SB3: https://github.com/DLR-RM/stable-baselines3<br/>
SB3 Contrib: https://github.com/Stable-Baselines-Team/stable-baselines3-contrib
Install the RL Zoo (with SB3 and SB3-Contrib):
```bash
pip install rl_zoo3
```
```
# Download model and save it into the logs/ folder
python -m rl_zoo3.load_from_hub --algo trpo --env Humanoid-v3 -orga qgallouedec -f logs/
python -m rl_zoo3.enjoy --algo trpo --env Humanoid-v3 -f logs/
```
If you installed the RL Zoo3 via pip (`pip install rl_zoo3`), from anywhere you can do:
```
python -m rl_zoo3.load_from_hub --algo trpo --env Humanoid-v3 -orga qgallouedec -f logs/
python -m rl_zoo3.enjoy --algo trpo --env Humanoid-v3 -f logs/
```
## Training (with the RL Zoo)
```
python -m rl_zoo3.train --algo trpo --env Humanoid-v3 -f logs/
# Upload the model and generate video (when possible)
python -m rl_zoo3.push_to_hub --algo trpo --env Humanoid-v3 -f logs/ -orga qgallouedec
```
## Hyperparameters
```python
OrderedDict([('batch_size', 128),
('cg_damping', 0.1),
('cg_max_steps', 25),
('gae_lambda', 0.95),
('gamma', 0.99),
('learning_rate', 0.001),
('n_critic_updates', 20),
('n_envs', 2),
('n_steps', 1024),
('n_timesteps', 2000000.0),
('normalize', True),
('policy', 'MlpPolicy'),
('sub_sampling_factor', 1),
('normalize_kwargs', {'norm_obs': True, 'norm_reward': False})])
```
|
Akashpb13/xlsr_maltese_wav2vec2
|
[
"pytorch",
"jax",
"wav2vec2",
"automatic-speech-recognition",
"mt",
"dataset:common_voice",
"transformers",
"audio",
"speech",
"xlsr-fine-tuning-week",
"license:apache-2.0",
"model-index"
] |
automatic-speech-recognition
|
{
"architectures": [
"Wav2Vec2ForCTC"
],
"model_type": "wav2vec2",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 8 | null |
---
library_name: stable-baselines3
tags:
- Humanoid-v3
- deep-reinforcement-learning
- reinforcement-learning
- stable-baselines3
model-index:
- name: TRPO
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: Humanoid-v3
type: Humanoid-v3
metrics:
- type: mean_reward
value: 1340.14 +/- 611.12
name: mean_reward
verified: false
---
# **TRPO** Agent playing **Humanoid-v3**
This is a trained model of a **TRPO** agent playing **Humanoid-v3**
using the [stable-baselines3 library](https://github.com/DLR-RM/stable-baselines3)
and the [RL Zoo](https://github.com/DLR-RM/rl-baselines3-zoo).
The RL Zoo is a training framework for Stable Baselines3
reinforcement learning agents,
with hyperparameter optimization and pre-trained agents included.
## Usage (with SB3 RL Zoo)
RL Zoo: https://github.com/DLR-RM/rl-baselines3-zoo<br/>
SB3: https://github.com/DLR-RM/stable-baselines3<br/>
SB3 Contrib: https://github.com/Stable-Baselines-Team/stable-baselines3-contrib
Install the RL Zoo (with SB3 and SB3-Contrib):
```bash
pip install rl_zoo3
```
```
# Download model and save it into the logs/ folder
python -m rl_zoo3.load_from_hub --algo trpo --env Humanoid-v3 -orga qgallouedec -f logs/
python -m rl_zoo3.enjoy --algo trpo --env Humanoid-v3 -f logs/
```
If you installed the RL Zoo3 via pip (`pip install rl_zoo3`), from anywhere you can do:
```
python -m rl_zoo3.load_from_hub --algo trpo --env Humanoid-v3 -orga qgallouedec -f logs/
python -m rl_zoo3.enjoy --algo trpo --env Humanoid-v3 -f logs/
```
## Training (with the RL Zoo)
```
python -m rl_zoo3.train --algo trpo --env Humanoid-v3 -f logs/
# Upload the model and generate video (when possible)
python -m rl_zoo3.push_to_hub --algo trpo --env Humanoid-v3 -f logs/ -orga qgallouedec
```
## Hyperparameters
```python
OrderedDict([('batch_size', 128),
('cg_damping', 0.1),
('cg_max_steps', 25),
('gae_lambda', 0.95),
('gamma', 0.99),
('learning_rate', 0.001),
('n_critic_updates', 20),
('n_envs', 2),
('n_steps', 1024),
('n_timesteps', 2000000.0),
('normalize', True),
('policy', 'MlpPolicy'),
('sub_sampling_factor', 1),
('normalize_kwargs', {'norm_obs': True, 'norm_reward': False})])
```
|
Akbarariza/Anjar
|
[] | null |
{
"architectures": null,
"model_type": null,
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 0 | null |
---
library_name: stable-baselines3
tags:
- HalfCheetah-v3
- deep-reinforcement-learning
- reinforcement-learning
- stable-baselines3
model-index:
- name: TRPO
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: HalfCheetah-v3
type: HalfCheetah-v3
metrics:
- type: mean_reward
value: 4594.99 +/- 162.10
name: mean_reward
verified: false
---
# **TRPO** Agent playing **HalfCheetah-v3**
This is a trained model of a **TRPO** agent playing **HalfCheetah-v3**
using the [stable-baselines3 library](https://github.com/DLR-RM/stable-baselines3)
and the [RL Zoo](https://github.com/DLR-RM/rl-baselines3-zoo).
The RL Zoo is a training framework for Stable Baselines3
reinforcement learning agents,
with hyperparameter optimization and pre-trained agents included.
## Usage (with SB3 RL Zoo)
RL Zoo: https://github.com/DLR-RM/rl-baselines3-zoo<br/>
SB3: https://github.com/DLR-RM/stable-baselines3<br/>
SB3 Contrib: https://github.com/Stable-Baselines-Team/stable-baselines3-contrib
Install the RL Zoo (with SB3 and SB3-Contrib):
```bash
pip install rl_zoo3
```
```
# Download model and save it into the logs/ folder
python -m rl_zoo3.load_from_hub --algo trpo --env HalfCheetah-v3 -orga qgallouedec -f logs/
python -m rl_zoo3.enjoy --algo trpo --env HalfCheetah-v3 -f logs/
```
If you installed the RL Zoo3 via pip (`pip install rl_zoo3`), from anywhere you can do:
```
python -m rl_zoo3.load_from_hub --algo trpo --env HalfCheetah-v3 -orga qgallouedec -f logs/
python -m rl_zoo3.enjoy --algo trpo --env HalfCheetah-v3 -f logs/
```
## Training (with the RL Zoo)
```
python -m rl_zoo3.train --algo trpo --env HalfCheetah-v3 -f logs/
# Upload the model and generate video (when possible)
python -m rl_zoo3.push_to_hub --algo trpo --env HalfCheetah-v3 -f logs/ -orga qgallouedec
```
## Hyperparameters
```python
OrderedDict([('batch_size', 128),
('cg_damping', 0.1),
('cg_max_steps', 25),
('gae_lambda', 0.95),
('gamma', 0.99),
('learning_rate', 0.001),
('n_critic_updates', 20),
('n_envs', 2),
('n_steps', 1024),
('n_timesteps', 1000000.0),
('normalize', True),
('policy', 'MlpPolicy'),
('sub_sampling_factor', 1),
('target_kl', 0.04),
('normalize_kwargs', {'norm_obs': True, 'norm_reward': False})])
```
|
Aklily/Lilys
|
[] | null |
{
"architectures": null,
"model_type": null,
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 0 | null |
---
library_name: stable-baselines3
tags:
- Swimmer-v3
- deep-reinforcement-learning
- reinforcement-learning
- stable-baselines3
model-index:
- name: TRPO
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: Swimmer-v3
type: Swimmer-v3
metrics:
- type: mean_reward
value: 349.98 +/- 1.39
name: mean_reward
verified: false
---
# **TRPO** Agent playing **Swimmer-v3**
This is a trained model of a **TRPO** agent playing **Swimmer-v3**
using the [stable-baselines3 library](https://github.com/DLR-RM/stable-baselines3)
and the [RL Zoo](https://github.com/DLR-RM/rl-baselines3-zoo).
The RL Zoo is a training framework for Stable Baselines3
reinforcement learning agents,
with hyperparameter optimization and pre-trained agents included.
## Usage (with SB3 RL Zoo)
RL Zoo: https://github.com/DLR-RM/rl-baselines3-zoo<br/>
SB3: https://github.com/DLR-RM/stable-baselines3<br/>
SB3 Contrib: https://github.com/Stable-Baselines-Team/stable-baselines3-contrib
Install the RL Zoo (with SB3 and SB3-Contrib):
```bash
pip install rl_zoo3
```
```
# Download model and save it into the logs/ folder
python -m rl_zoo3.load_from_hub --algo trpo --env Swimmer-v3 -orga qgallouedec -f logs/
python -m rl_zoo3.enjoy --algo trpo --env Swimmer-v3 -f logs/
```
If you installed the RL Zoo3 via pip (`pip install rl_zoo3`), from anywhere you can do:
```
python -m rl_zoo3.load_from_hub --algo trpo --env Swimmer-v3 -orga qgallouedec -f logs/
python -m rl_zoo3.enjoy --algo trpo --env Swimmer-v3 -f logs/
```
## Training (with the RL Zoo)
```
python -m rl_zoo3.train --algo trpo --env Swimmer-v3 -f logs/
# Upload the model and generate video (when possible)
python -m rl_zoo3.push_to_hub --algo trpo --env Swimmer-v3 -f logs/ -orga qgallouedec
```
## Hyperparameters
```python
OrderedDict([('batch_size', 128),
('cg_damping', 0.1),
('cg_max_steps', 25),
('gae_lambda', 0.95),
('gamma', 0.9999),
('learning_rate', 0.001),
('n_critic_updates', 20),
('n_envs', 2),
('n_steps', 1024),
('n_timesteps', 1000000.0),
('normalize', True),
('policy', 'MlpPolicy'),
('sub_sampling_factor', 1),
('normalize_kwargs', {'norm_obs': True, 'norm_reward': False})])
```
|
AkshatSurolia/BEiT-FaceMask-Finetuned
|
[
"pytorch",
"beit",
"image-classification",
"dataset:Face-Mask18K",
"transformers",
"license:apache-2.0",
"autotrain_compatible"
] |
image-classification
|
{
"architectures": [
"BeitForImageClassification"
],
"model_type": "beit",
"task_specific_params": {
"conversational": {
"max_length": null
},
"summarization": {
"early_stopping": null,
"length_penalty": null,
"max_length": null,
"min_length": null,
"no_repeat_ngram_size": null,
"num_beams": null,
"prefix": null
},
"text-generation": {
"do_sample": null,
"max_length": null
},
"translation_en_to_de": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_fr": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
},
"translation_en_to_ro": {
"early_stopping": null,
"max_length": null,
"num_beams": null,
"prefix": null
}
}
}
| 239 | null |
---
library_name: stable-baselines3
tags:
- HalfCheetah-v3
- deep-reinforcement-learning
- reinforcement-learning
- stable-baselines3
model-index:
- name: TRPO
results:
- task:
type: reinforcement-learning
name: reinforcement-learning
dataset:
name: HalfCheetah-v3
type: HalfCheetah-v3
metrics:
- type: mean_reward
value: 4739.49 +/- 151.86
name: mean_reward
verified: false
---
# **TRPO** Agent playing **HalfCheetah-v3**
This is a trained model of a **TRPO** agent playing **HalfCheetah-v3**
using the [stable-baselines3 library](https://github.com/DLR-RM/stable-baselines3)
and the [RL Zoo](https://github.com/DLR-RM/rl-baselines3-zoo).
The RL Zoo is a training framework for Stable Baselines3
reinforcement learning agents,
with hyperparameter optimization and pre-trained agents included.
## Usage (with SB3 RL Zoo)
RL Zoo: https://github.com/DLR-RM/rl-baselines3-zoo<br/>
SB3: https://github.com/DLR-RM/stable-baselines3<br/>
SB3 Contrib: https://github.com/Stable-Baselines-Team/stable-baselines3-contrib
Install the RL Zoo (with SB3 and SB3-Contrib):
```bash
pip install rl_zoo3
```
```
# Download model and save it into the logs/ folder
python -m rl_zoo3.load_from_hub --algo trpo --env HalfCheetah-v3 -orga qgallouedec -f logs/
python -m rl_zoo3.enjoy --algo trpo --env HalfCheetah-v3 -f logs/
```
If you installed the RL Zoo3 via pip (`pip install rl_zoo3`), from anywhere you can do:
```
python -m rl_zoo3.load_from_hub --algo trpo --env HalfCheetah-v3 -orga qgallouedec -f logs/
python -m rl_zoo3.enjoy --algo trpo --env HalfCheetah-v3 -f logs/
```
## Training (with the RL Zoo)
```
python -m rl_zoo3.train --algo trpo --env HalfCheetah-v3 -f logs/
# Upload the model and generate video (when possible)
python -m rl_zoo3.push_to_hub --algo trpo --env HalfCheetah-v3 -f logs/ -orga qgallouedec
```
## Hyperparameters
```python
OrderedDict([('batch_size', 128),
('cg_damping', 0.1),
('cg_max_steps', 25),
('gae_lambda', 0.95),
('gamma', 0.99),
('learning_rate', 0.001),
('n_critic_updates', 20),
('n_envs', 2),
('n_steps', 1024),
('n_timesteps', 1000000.0),
('normalize', True),
('policy', 'MlpPolicy'),
('sub_sampling_factor', 1),
('target_kl', 0.04),
('normalize_kwargs', {'norm_obs': True, 'norm_reward': False})])
```
|
Subsets and Splits
No community queries yet
The top public SQL queries from the community will appear here once available.