YAML Metadata
Warning:
The pipeline tag "video-to-video" is not in the official list: text-classification, token-classification, table-question-answering, question-answering, zero-shot-classification, translation, summarization, feature-extraction, text-generation, text2text-generation, fill-mask, sentence-similarity, text-to-speech, text-to-audio, automatic-speech-recognition, audio-to-audio, audio-classification, audio-text-to-text, voice-activity-detection, depth-estimation, image-classification, object-detection, image-segmentation, text-to-image, image-to-text, image-to-image, image-to-video, unconditional-image-generation, video-classification, reinforcement-learning, robotics, tabular-classification, tabular-regression, tabular-to-text, table-to-text, multiple-choice, text-ranking, text-retrieval, time-series-forecasting, text-to-video, image-text-to-text, visual-question-answering, document-question-answering, zero-shot-image-classification, graph-ml, mask-generation, zero-shot-object-detection, text-to-3d, image-to-3d, image-feature-extraction, video-text-to-text, keypoint-detection, visual-document-retrieval, any-to-any, other
Tensorflow Keras Implementation of Next-Frame Video Prediction with Convolutional LSTMs 📽️
This repo contains the models and the notebook on How to build and train a convolutional LSTM model for next-frame video prediction.
Full credits to Amogh Joshi
Background Information
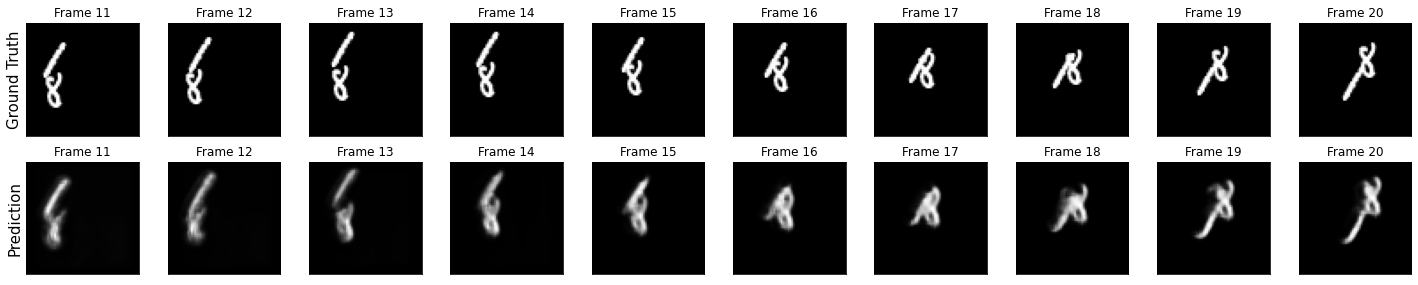
The Convolutional LSTM architectures bring together time series processing and computer vision by introducing a convolutional recurrent cell in a LSTM layer. This model uses the Convolutional LSTMs in an application to next-frame prediction, the process of predicting what video frames come next given a series of past frames.
Training Dataset
This model was trained on the Moving MNIST dataset.
For next-frame prediction, our model will be using a previous frame, which we'll call f_n, to predict a new frame, called f_(n + 1). To allow the model to create these predictions, we'll need to process the data such that we have "shifted" inputs and outputs, where the input data is frame x_n, being used to predict frame y_(n + 1).

