
Point cloud segmentation with PointNet
This repo contains an Implementation of a PointNet-based model for segmenting point clouds..
Full credits to Soumik Rakshit, Sayak Paul
Background Information
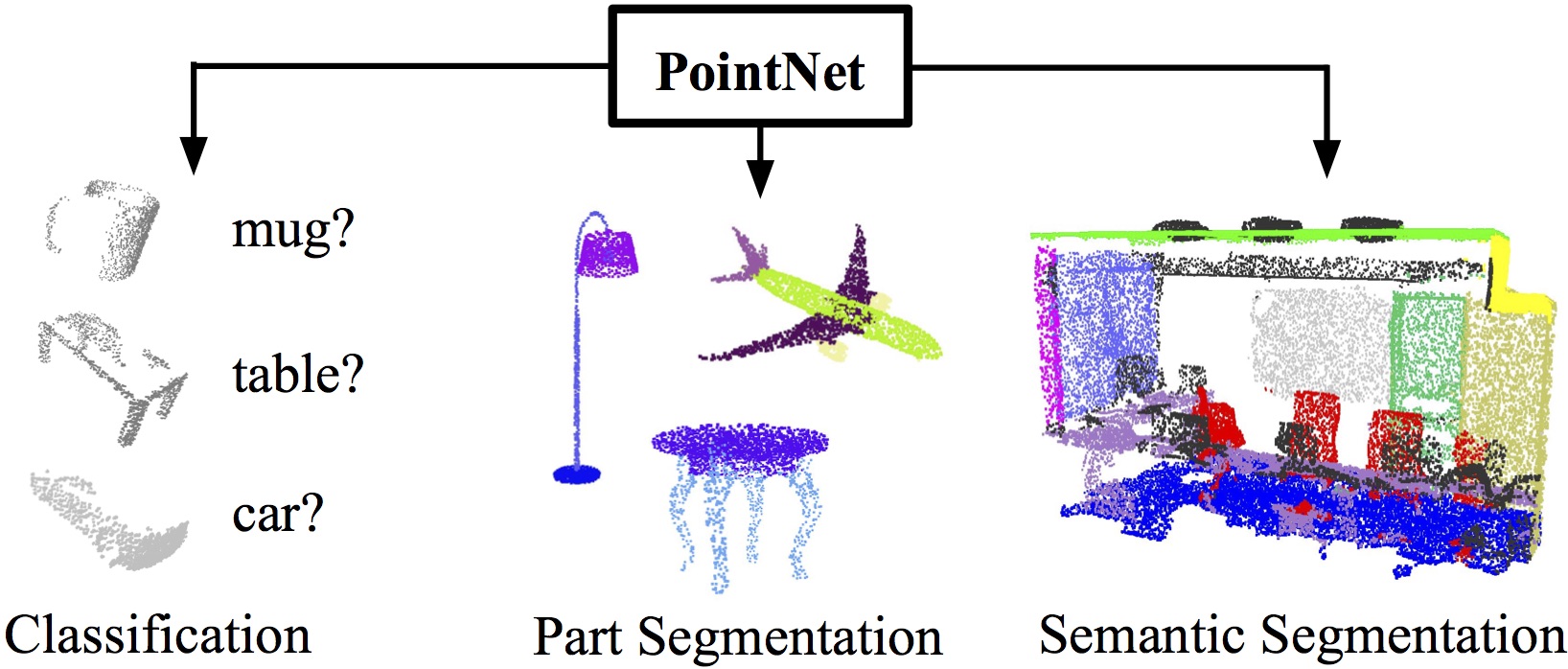
A "point cloud" is an important type of data structure for storing geometric shape data. Due to its irregular format, it's often transformed into regular 3D voxel grids or collections of images before being used in deep learning applications, a step which makes the data unnecessarily large. The PointNet family of models solves this problem by directly consuming point clouds, respecting the permutation-invariance property of the point data. The PointNet family of models provides a simple, unified architecture for applications ranging from object classification, part segmentation, to scene semantic parsing.
In this example, we demonstrate the implementation of the PointNet architecture for shape segmentation.
References
- PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation
- Point cloud classification with PointNet
- Spatial Transformer Networks

Training Dataset
This model was trained on the ShapeNet dataset.
The ShapeNet dataset is an ongoing effort to establish a richly-annotated, large-scale dataset of 3D shapes. ShapeNetCore is a subset of the full ShapeNet dataset with clean single 3D models and manually verified category and alignment annotations. It covers 55 common object categories, with about 51,300 unique 3D models.
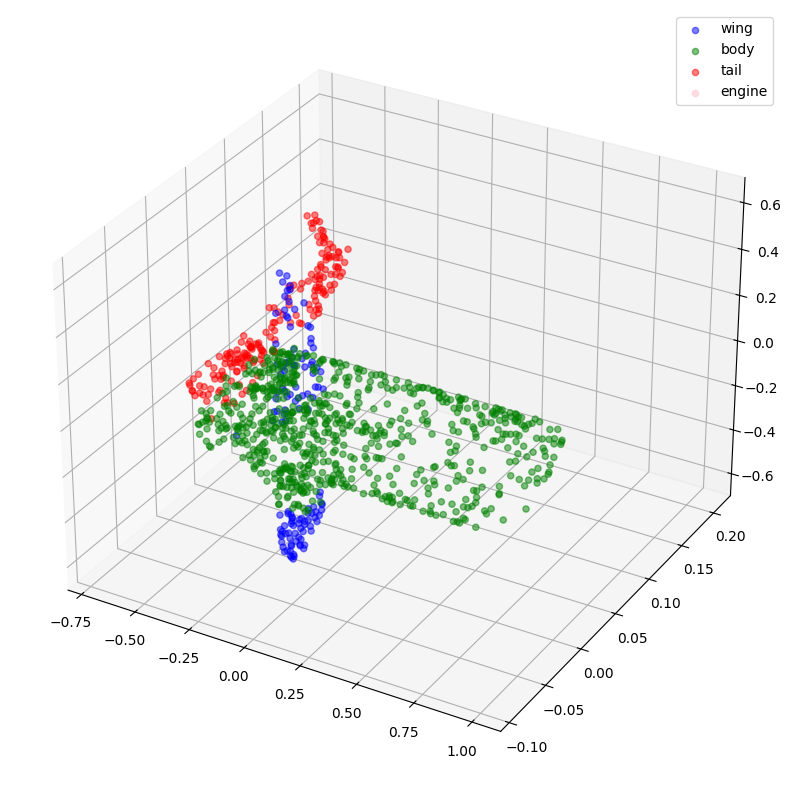
Prediction example
- Downloads last month
- 15