|
|
---
|
|
|
comments: true
|
|
|
description: Speed Estimation Using Ultralytics YOLOv8
|
|
|
keywords: Ultralytics, YOLOv8, Object Detection, Speed Estimation, Object Tracking, Notebook, IPython Kernel, CLI, Python SDK
|
|
|
---
|
|
|
|
|
|
# Speed Estimation using Ultralytics YOLOv8 🚀
|
|
|
|
|
|
## What is Speed Estimation?
|
|
|
|
|
|
Speed estimation is the process of calculating the rate of movement of an object within a given context, often employed in computer vision applications. Using [Ultralytics YOLOv8](https://github.com/ultralytics/ultralytics/) you can now calculate the speed of object using [object tracking](https://docs.ultralytics.com/modes/track/) alongside distance and time data, crucial for tasks like traffic and surveillance. The accuracy of speed estimation directly influences the efficiency and reliability of various applications, making it a key component in the advancement of intelligent systems and real-time decision-making processes.
|
|
|
|
|
|
<p align="center">
|
|
|
<br>
|
|
|
<iframe loading="lazy" width="720" height="405" src="https://www.youtube.com/embed/rCggzXRRSRo"
|
|
|
title="YouTube video player" frameborder="0"
|
|
|
allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture; web-share"
|
|
|
allowfullscreen>
|
|
|
</iframe>
|
|
|
<br>
|
|
|
<strong>Watch:</strong> Speed Estimation using Ultralytics YOLOv8
|
|
|
</p>
|
|
|
|
|
|
## Advantages of Speed Estimation?
|
|
|
|
|
|
- **Efficient Traffic Control:** Accurate speed estimation aids in managing traffic flow, enhancing safety, and reducing congestion on roadways.
|
|
|
- **Precise Autonomous Navigation:** In autonomous systems like self-driving cars, reliable speed estimation ensures safe and accurate vehicle navigation.
|
|
|
- **Enhanced Surveillance Security:** Speed estimation in surveillance analytics helps identify unusual behaviors or potential threats, improving the effectiveness of security measures.
|
|
|
|
|
|
## Real World Applications
|
|
|
|
|
|
| Transportation | Transportation |
|
|
|
|:-------------------------------------------------------------------------------------------------------------------------------------------------------:|:---------------------------------------------------------------------------------------------------------------------------------------------------------:|
|
|
|
|  | 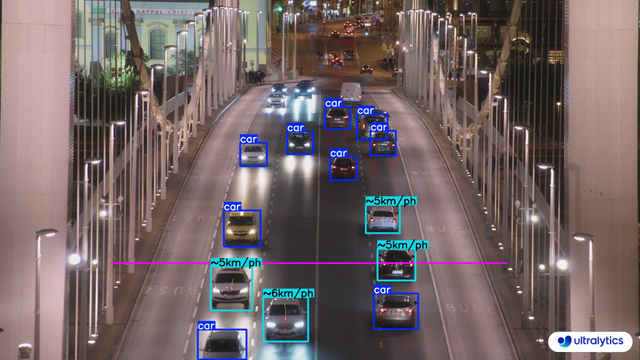 |
|
|
|
| Speed Estimation on Road using Ultralytics YOLOv8 | Speed Estimation on Bridge using Ultralytics YOLOv8 |
|
|
|
|
|
|
!!! Example "Speed Estimation using YOLOv8 Example"
|
|
|
|
|
|
=== "Speed Estimation"
|
|
|
|
|
|
```python
|
|
|
from ultralytics import YOLO
|
|
|
from ultralytics.solutions import speed_estimation
|
|
|
import cv2
|
|
|
|
|
|
model = YOLO("yolov8n.pt")
|
|
|
names = model.model.names
|
|
|
|
|
|
cap = cv2.VideoCapture("path/to/video/file.mp4")
|
|
|
assert cap.isOpened(), "Error reading video file"
|
|
|
w, h, fps = (int(cap.get(x)) for x in (cv2.CAP_PROP_FRAME_WIDTH, cv2.CAP_PROP_FRAME_HEIGHT, cv2.CAP_PROP_FPS))
|
|
|
|
|
|
# Video writer
|
|
|
video_writer = cv2.VideoWriter("speed_estimation.avi",
|
|
|
cv2.VideoWriter_fourcc(*'mp4v'),
|
|
|
fps,
|
|
|
(w, h))
|
|
|
|
|
|
line_pts = [(0, 360), (1280, 360)]
|
|
|
|
|
|
# Init speed-estimation obj
|
|
|
speed_obj = speed_estimation.SpeedEstimator()
|
|
|
speed_obj.set_args(reg_pts=line_pts,
|
|
|
names=names,
|
|
|
view_img=True)
|
|
|
|
|
|
while cap.isOpened():
|
|
|
|
|
|
success, im0 = cap.read()
|
|
|
if not success:
|
|
|
print("Video frame is empty or video processing has been successfully completed.")
|
|
|
break
|
|
|
|
|
|
tracks = model.track(im0, persist=True, show=False)
|
|
|
|
|
|
im0 = speed_obj.estimate_speed(im0, tracks)
|
|
|
video_writer.write(im0)
|
|
|
|
|
|
cap.release()
|
|
|
video_writer.release()
|
|
|
cv2.destroyAllWindows()
|
|
|
|
|
|
```
|
|
|
|
|
|
???+ warning "Speed is Estimate"
|
|
|
|
|
|
Speed will be an estimate and may not be completely accurate. Additionally, the estimation can vary depending on GPU speed.
|
|
|
|
|
|
### Optional Arguments `set_args`
|
|
|
|
|
|
| Name | Type | Default | Description |
|
|
|
|--------------------|--------|----------------------------|---------------------------------------------------|
|
|
|
| `reg_pts` | `list` | `[(20, 400), (1260, 400)]` | Points defining the Region Area |
|
|
|
| `names` | `dict` | `None` | Classes names |
|
|
|
| `view_img` | `bool` | `False` | Display frames with counts |
|
|
|
| `line_thickness` | `int` | `2` | Increase bounding boxes thickness |
|
|
|
| `region_thickness` | `int` | `5` | Thickness for object counter region or line |
|
|
|
| `spdl_dist_thresh` | `int` | `10` | Euclidean Distance threshold for speed check line |
|
|
|
|
|
|
### Arguments `model.track`
|
|
|
|
|
|
| Name | Type | Default | Description |
|
|
|
|-----------|---------|----------------|-------------------------------------------------------------|
|
|
|
| `source` | `im0` | `None` | source directory for images or videos |
|
|
|
| `persist` | `bool` | `False` | persisting tracks between frames |
|
|
|
| `tracker` | `str` | `botsort.yaml` | Tracking method 'bytetrack' or 'botsort' |
|
|
|
| `conf` | `float` | `0.3` | Confidence Threshold |
|
|
|
| `iou` | `float` | `0.5` | IOU Threshold |
|
|
|
| `classes` | `list` | `None` | filter results by class, i.e. classes=0, or classes=[0,2,3] |
|
|
|
| `verbose` | `bool` | `True` | Display the object tracking results |
|
|
|
|
