
repo_id
stringlengths 15
86
| file_path
stringlengths 28
180
| content
stringlengths 1
1.75M
| __index_level_0__
int64 0
0
|
|---|---|---|---|
hf_public_repos/diffusers/docs/source/en/api | hf_public_repos/diffusers/docs/source/en/api/schedulers/ipndm.md | <!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# improved pseudo numerical methods for diffusion models (iPNDM)
## Overview
Original implementation can be found [here](https://github.com/crowsonkb/v-diffusion-pytorch/blob/987f8985e38208345c1959b0ea767a625831cc9b/diffusion/sampling.py#L296).
## IPNDMScheduler
[[autodoc]] IPNDMScheduler | 0 |
hf_public_repos/diffusers/docs/source/en/api | hf_public_repos/diffusers/docs/source/en/api/schedulers/lms_discrete.md | <!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# Linear multistep scheduler for discrete beta schedules
## Overview
Original implementation can be found [here](https://arxiv.org/abs/2206.00364).
## LMSDiscreteScheduler
[[autodoc]] LMSDiscreteScheduler | 0 |
hf_public_repos/diffusers/docs/source/en/api | hf_public_repos/diffusers/docs/source/en/api/schedulers/dpm_discrete_ancestral.md | <!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# DPM Discrete Scheduler with ancestral sampling inspired by Karras et. al paper
## Overview
Inspired by [Karras et. al](https://arxiv.org/abs/2206.00364). Scheduler ported from @crowsonkb's https://github.com/crowsonkb/k-diffusion library:
All credit for making this scheduler work goes to [Katherine Crowson](https://github.com/crowsonkb/)
## KDPM2AncestralDiscreteScheduler
[[autodoc]] KDPM2AncestralDiscreteScheduler | 0 |
hf_public_repos/diffusers/docs/source/en/api | hf_public_repos/diffusers/docs/source/en/api/schedulers/deis.md | <!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# DEIS
Fast Sampling of Diffusion Models with Exponential Integrator.
## Overview
Original paper can be found [here](https://arxiv.org/abs/2204.13902). The original implementation can be found [here](https://github.com/qsh-zh/deis).
## DEISMultistepScheduler
[[autodoc]] DEISMultistepScheduler
| 0 |
hf_public_repos/diffusers/docs/source/en/api | hf_public_repos/diffusers/docs/source/en/api/schedulers/heun.md | <!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# Heun scheduler inspired by Karras et. al paper
## Overview
Algorithm 1 of [Karras et. al](https://arxiv.org/abs/2206.00364).
Scheduler ported from @crowsonkb's https://github.com/crowsonkb/k-diffusion library:
All credit for making this scheduler work goes to [Katherine Crowson](https://github.com/crowsonkb/)
## HeunDiscreteScheduler
[[autodoc]] HeunDiscreteScheduler | 0 |
hf_public_repos/diffusers/docs/source/en/api | hf_public_repos/diffusers/docs/source/en/api/schedulers/unipc.md | <!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# UniPC
## Overview
UniPC is a training-free framework designed for the fast sampling of diffusion models, which consists of a corrector (UniC) and a predictor (UniP) that share a unified analytical form and support arbitrary orders.
For more details about the method, please refer to the [paper](https://arxiv.org/abs/2302.04867) and the [code](https://github.com/wl-zhao/UniPC).
Fast Sampling of Diffusion Models with Exponential Integrator.
## UniPCMultistepScheduler
[[autodoc]] UniPCMultistepScheduler
| 0 |
hf_public_repos/diffusers/docs/source/en/api | hf_public_repos/diffusers/docs/source/en/api/schedulers/cm_stochastic_iterative.md | # Consistency Model Multistep Scheduler
## Overview
Multistep and onestep scheduler (Algorithm 1) introduced alongside consistency models in the paper [Consistency Models](https://arxiv.org/abs/2303.01469) by Yang Song, Prafulla Dhariwal, Mark Chen, and Ilya Sutskever.
Based on the [original consistency models implementation](https://github.com/openai/consistency_models).
Should generate good samples from [`ConsistencyModelPipeline`] in one or a small number of steps.
## CMStochasticIterativeScheduler
[[autodoc]] CMStochasticIterativeScheduler
| 0 |
hf_public_repos/diffusers/docs/source/en | hf_public_repos/diffusers/docs/source/en/using-diffusers/loading_overview.md | <!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# Overview
🧨 Diffusers offers many pipelines, models, and schedulers for generative tasks. To make loading these components as simple as possible, we provide a single and unified method - `from_pretrained()` - that loads any of these components from either the Hugging Face [Hub](https://huggingface.co/models?library=diffusers&sort=downloads) or your local machine. Whenever you load a pipeline or model, the latest files are automatically downloaded and cached so you can quickly reuse them next time without redownloading the files.
This section will show you everything you need to know about loading pipelines, how to load different components in a pipeline, how to load checkpoint variants, and how to load community pipelines. You'll also learn how to load schedulers and compare the speed and quality trade-offs of using different schedulers. Finally, you'll see how to convert and load KerasCV checkpoints so you can use them in PyTorch with 🧨 Diffusers. | 0 |
hf_public_repos/diffusers/docs/source/en | hf_public_repos/diffusers/docs/source/en/using-diffusers/pipeline_overview.md | <!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# Overview
A pipeline is an end-to-end class that provides a quick and easy way to use a diffusion system for inference by bundling independently trained models and schedulers together. Certain combinations of models and schedulers define specific pipeline types, like [`StableDiffusionPipeline`] or [`StableDiffusionControlNetPipeline`], with specific capabilities. All pipeline types inherit from the base [`DiffusionPipeline`] class; pass it any checkpoint, and it'll automatically detect the pipeline type and load the necessary components.
This section introduces you to some of the tasks supported by our pipelines such as unconditional image generation and different techniques and variations of text-to-image generation. You'll also learn how to gain more control over the generation process by setting a seed for reproducibility and weighting prompts to adjust the influence certain words in the prompt has over the output. Finally, you'll see how you can create a community pipeline for a custom task like generating images from speech. | 0 |
hf_public_repos/diffusers/docs/source/en | hf_public_repos/diffusers/docs/source/en/using-diffusers/depth2img.md | <!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# Text-guided depth-to-image generation
[[open-in-colab]]
The [`StableDiffusionDepth2ImgPipeline`] lets you pass a text prompt and an initial image to condition the generation of new images. In addition, you can also pass a `depth_map` to preserve the image structure. If no `depth_map` is provided, the pipeline automatically predicts the depth via an integrated [depth-estimation model](https://github.com/isl-org/MiDaS).
Start by creating an instance of the [`StableDiffusionDepth2ImgPipeline`]:
```python
import torch
import requests
from PIL import Image
from diffusers import StableDiffusionDepth2ImgPipeline
pipe = StableDiffusionDepth2ImgPipeline.from_pretrained(
"stabilityai/stable-diffusion-2-depth",
torch_dtype=torch.float16,
).to("cuda")
```
Now pass your prompt to the pipeline. You can also pass a `negative_prompt` to prevent certain words from guiding how an image is generated:
```python
url = "http://images.cocodataset.org/val2017/000000039769.jpg"
init_image = Image.open(requests.get(url, stream=True).raw)
prompt = "two tigers"
n_prompt = "bad, deformed, ugly, bad anatomy"
image = pipe(prompt=prompt, image=init_image, negative_prompt=n_prompt, strength=0.7).images[0]
image
```
| Input | Output |
|---------------------------------------------------------------------------------|---------------------------------------------------------------------------------------------------------------------------------------|
| <img src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/coco-cats.png" width="500"/> | <img src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/depth2img-tigers.png" width="500"/> |
Play around with the Spaces below and see if you notice a difference between generated images with and without a depth map!
<iframe
src="https://radames-stable-diffusion-depth2img.hf.space"
frameborder="0"
width="850"
height="500"
></iframe>
| 0 |
hf_public_repos/diffusers/docs/source/en | hf_public_repos/diffusers/docs/source/en/using-diffusers/reusing_seeds.md | <!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# Improve image quality with deterministic generation
[[open-in-colab]]
A common way to improve the quality of generated images is with *deterministic batch generation*, generate a batch of images and select one image to improve with a more detailed prompt in a second round of inference. The key is to pass a list of [`torch.Generator`](https://pytorch.org/docs/stable/generated/torch.Generator.html#generator)'s to the pipeline for batched image generation, and tie each `Generator` to a seed so you can reuse it for an image.
Let's use [`runwayml/stable-diffusion-v1-5`](runwayml/stable-diffusion-v1-5) for example, and generate several versions of the following prompt:
```py
prompt = "Labrador in the style of Vermeer"
```
Instantiate a pipeline with [`DiffusionPipeline.from_pretrained`] and place it on a GPU (if available):
```python
>>> from diffusers import DiffusionPipeline
>>> pipe = DiffusionPipeline.from_pretrained("runwayml/stable-diffusion-v1-5", torch_dtype=torch.float16)
>>> pipe = pipe.to("cuda")
```
Now, define four different `Generator`'s and assign each `Generator` a seed (`0` to `3`) so you can reuse a `Generator` later for a specific image:
```python
>>> import torch
>>> generator = [torch.Generator(device="cuda").manual_seed(i) for i in range(4)]
```
Generate the images and have a look:
```python
>>> images = pipe(prompt, generator=generator, num_images_per_prompt=4).images
>>> images
```

In this example, you'll improve upon the first image - but in reality, you can use any image you want (even the image with double sets of eyes!). The first image used the `Generator` with seed `0`, so you'll reuse that `Generator` for the second round of inference. To improve the quality of the image, add some additional text to the prompt:
```python
prompt = [prompt + t for t in [", highly realistic", ", artsy", ", trending", ", colorful"]]
generator = [torch.Generator(device="cuda").manual_seed(0) for i in range(4)]
```
Create four generators with seed `0`, and generate another batch of images, all of which should look like the first image from the previous round!
```python
>>> images = pipe(prompt, generator=generator).images
>>> images
```

| 0 |
hf_public_repos/diffusers/docs/source/en | hf_public_repos/diffusers/docs/source/en/using-diffusers/controlling_generation.md | <!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# Controlled generation
Controlling outputs generated by diffusion models has been long pursued by the community and is now an active research topic. In many popular diffusion models, subtle changes in inputs, both images and text prompts, can drastically change outputs. In an ideal world we want to be able to control how semantics are preserved and changed.
Most examples of preserving semantics reduce to being able to accurately map a change in input to a change in output. I.e. adding an adjective to a subject in a prompt preserves the entire image, only modifying the changed subject. Or, image variation of a particular subject preserves the subject's pose.
Additionally, there are qualities of generated images that we would like to influence beyond semantic preservation. I.e. in general, we would like our outputs to be of good quality, adhere to a particular style, or be realistic.
We will document some of the techniques `diffusers` supports to control generation of diffusion models. Much is cutting edge research and can be quite nuanced. If something needs clarifying or you have a suggestion, don't hesitate to open a discussion on the [forum](https://discuss.huggingface.co/) or a [GitHub issue](https://github.com/huggingface/diffusers/issues).
We provide a high level explanation of how the generation can be controlled as well as a snippet of the technicals. For more in depth explanations on the technicals, the original papers which are linked from the pipelines are always the best resources.
Depending on the use case, one should choose a technique accordingly. In many cases, these techniques can be combined. For example, one can combine Textual Inversion with SEGA to provide more semantic guidance to the outputs generated using Textual Inversion.
Unless otherwise mentioned, these are techniques that work with existing models and don't require their own weights.
1. [Instruct Pix2Pix](#instruct-pix2pix)
2. [Pix2Pix Zero](#pix2pixzero)
3. [Attend and Excite](#attend-and-excite)
4. [Semantic Guidance](#semantic-guidance)
5. [Self-attention Guidance](#self-attention-guidance)
6. [Depth2Image](#depth2image)
7. [MultiDiffusion Panorama](#multidiffusion-panorama)
8. [DreamBooth](#dreambooth)
9. [Textual Inversion](#textual-inversion)
10. [ControlNet](#controlnet)
11. [Prompt Weighting](#prompt-weighting)
12. [Custom Diffusion](#custom-diffusion)
13. [Model Editing](#model-editing)
14. [DiffEdit](#diffedit)
For convenience, we provide a table to denote which methods are inference-only and which require fine-tuning/training.
| **Method** | **Inference only** | **Requires training /<br> fine-tuning** | **Comments** |
| :-------------------------------------------------: | :----------------: | :-------------------------------------: | :---------------------------------------------------------------------------------------------: |
| [Instruct Pix2Pix](#instruct-pix2pix) | ✅ | ❌ | Can additionally be<br>fine-tuned for better <br>performance on specific <br>edit instructions. |
| [Pix2Pix Zero](#pix2pixzero) | ✅ | ❌ | |
| [Attend and Excite](#attend-and-excite) | ✅ | ❌ | |
| [Semantic Guidance](#semantic-guidance) | ✅ | ❌ | |
| [Self-attention Guidance](#self-attention-guidance) | ✅ | ❌ | |
| [Depth2Image](#depth2image) | ✅ | ❌ | |
| [MultiDiffusion Panorama](#multidiffusion-panorama) | ✅ | ❌ | |
| [DreamBooth](#dreambooth) | ❌ | ✅ | |
| [Textual Inversion](#textual-inversion) | ❌ | ✅ | |
| [ControlNet](#controlnet) | ✅ | ❌ | A ControlNet can be <br>trained/fine-tuned on<br>a custom conditioning. |
| [Prompt Weighting](#prompt-weighting) | ✅ | ❌ | |
| [Custom Diffusion](#custom-diffusion) | ❌ | ✅ | |
| [Model Editing](#model-editing) | ✅ | ❌ | |
| [DiffEdit](#diffedit) | ✅ | ❌ | |
| [T2I-Adapter](#t2i-adapter) | ✅ | ❌ | |
## Instruct Pix2Pix
[Paper](https://arxiv.org/abs/2211.09800)
[Instruct Pix2Pix](../api/pipelines/stable_diffusion/pix2pix) is fine-tuned from stable diffusion to support editing input images. It takes as inputs an image and a prompt describing an edit, and it outputs the edited image.
Instruct Pix2Pix has been explicitly trained to work well with [InstructGPT](https://openai.com/blog/instruction-following/)-like prompts.
See [here](../api/pipelines/stable_diffusion/pix2pix) for more information on how to use it.
## Pix2Pix Zero
[Paper](https://arxiv.org/abs/2302.03027)
[Pix2Pix Zero](../api/pipelines/stable_diffusion/pix2pix_zero) allows modifying an image so that one concept or subject is translated to another one while preserving general image semantics.
The denoising process is guided from one conceptual embedding towards another conceptual embedding. The intermediate latents are optimized during the denoising process to push the attention maps towards reference attention maps. The reference attention maps are from the denoising process of the input image and are used to encourage semantic preservation.
Pix2Pix Zero can be used both to edit synthetic images as well as real images.
- To edit synthetic images, one first generates an image given a caption.
Next, we generate image captions for the concept that shall be edited and for the new target concept. We can use a model like [Flan-T5](https://huggingface.co/docs/transformers/model_doc/flan-t5) for this purpose. Then, "mean" prompt embeddings for both the source and target concepts are created via the text encoder. Finally, the pix2pix-zero algorithm is used to edit the synthetic image.
- To edit a real image, one first generates an image caption using a model like [BLIP](https://huggingface.co/docs/transformers/model_doc/blip). Then one applies ddim inversion on the prompt and image to generate "inverse" latents. Similar to before, "mean" prompt embeddings for both source and target concepts are created and finally the pix2pix-zero algorithm in combination with the "inverse" latents is used to edit the image.
<Tip>
Pix2Pix Zero is the first model that allows "zero-shot" image editing. This means that the model
can edit an image in less than a minute on a consumer GPU as shown [here](../api/pipelines/stable_diffusion/pix2pix_zero#usage-example).
</Tip>
As mentioned above, Pix2Pix Zero includes optimizing the latents (and not any of the UNet, VAE, or the text encoder) to steer the generation toward a specific concept. This means that the overall
pipeline might require more memory than a standard [StableDiffusionPipeline](../api/pipelines/stable_diffusion/text2img).
See [here](../api/pipelines/stable_diffusion/pix2pix_zero) for more information on how to use it.
## Attend and Excite
[Paper](https://arxiv.org/abs/2301.13826)
[Attend and Excite](../api/pipelines/stable_diffusion/attend_and_excite) allows subjects in the prompt to be faithfully represented in the final image.
A set of token indices are given as input, corresponding to the subjects in the prompt that need to be present in the image. During denoising, each token index is guaranteed to have a minimum attention threshold for at least one patch of the image. The intermediate latents are iteratively optimized during the denoising process to strengthen the attention of the most neglected subject token until the attention threshold is passed for all subject tokens.
Like Pix2Pix Zero, Attend and Excite also involves a mini optimization loop (leaving the pre-trained weights untouched) in its pipeline and can require more memory than the usual `StableDiffusionPipeline`.
See [here](../api/pipelines/stable_diffusion/attend_and_excite) for more information on how to use it.
## Semantic Guidance (SEGA)
[Paper](https://arxiv.org/abs/2301.12247)
SEGA allows applying or removing one or more concepts from an image. The strength of the concept can also be controlled. I.e. the smile concept can be used to incrementally increase or decrease the smile of a portrait.
Similar to how classifier free guidance provides guidance via empty prompt inputs, SEGA provides guidance on conceptual prompts. Multiple of these conceptual prompts can be applied simultaneously. Each conceptual prompt can either add or remove their concept depending on if the guidance is applied positively or negatively.
Unlike Pix2Pix Zero or Attend and Excite, SEGA directly interacts with the diffusion process instead of performing any explicit gradient-based optimization.
See [here](../api/pipelines/semantic_stable_diffusion) for more information on how to use it.
## Self-attention Guidance (SAG)
[Paper](https://arxiv.org/abs/2210.00939)
[Self-attention Guidance](../api/pipelines/stable_diffusion/self_attention_guidance) improves the general quality of images.
SAG provides guidance from predictions not conditioned on high-frequency details to fully conditioned images. The high frequency details are extracted out of the UNet self-attention maps.
See [here](../api/pipelines/stable_diffusion/self_attention_guidance) for more information on how to use it.
## Depth2Image
[Project](https://huggingface.co/stabilityai/stable-diffusion-2-depth)
[Depth2Image](../pipelines/stable_diffusion_2#depthtoimage) is fine-tuned from Stable Diffusion to better preserve semantics for text guided image variation.
It conditions on a monocular depth estimate of the original image.
See [here](../api/pipelines/stable_diffusion_2#depthtoimage) for more information on how to use it.
<Tip>
An important distinction between methods like InstructPix2Pix and Pix2Pix Zero is that the former
involves fine-tuning the pre-trained weights while the latter does not. This means that you can
apply Pix2Pix Zero to any of the available Stable Diffusion models.
</Tip>
## MultiDiffusion Panorama
[Paper](https://arxiv.org/abs/2302.08113)
MultiDiffusion defines a new generation process over a pre-trained diffusion model. This process binds together multiple diffusion generation methods that can be readily applied to generate high quality and diverse images. Results adhere to user-provided controls, such as desired aspect ratio (e.g., panorama), and spatial guiding signals, ranging from tight segmentation masks to bounding boxes.
[MultiDiffusion Panorama](../api/pipelines/stable_diffusion/panorama) allows to generate high-quality images at arbitrary aspect ratios (e.g., panoramas).
See [here](../api/pipelines/stable_diffusion/panorama) for more information on how to use it to generate panoramic images.
## Fine-tuning your own models
In addition to pre-trained models, Diffusers has training scripts for fine-tuning models on user-provided data.
## DreamBooth
[DreamBooth](../training/dreambooth) fine-tunes a model to teach it about a new subject. I.e. a few pictures of a person can be used to generate images of that person in different styles.
See [here](../training/dreambooth) for more information on how to use it.
## Textual Inversion
[Textual Inversion](../training/text_inversion) fine-tunes a model to teach it about a new concept. I.e. a few pictures of a style of artwork can be used to generate images in that style.
See [here](../training/text_inversion) for more information on how to use it.
## ControlNet
[Paper](https://arxiv.org/abs/2302.05543)
[ControlNet](../api/pipelines/controlnet) is an auxiliary network which adds an extra condition.
[ControlNet](../api/pipelines/controlnet) is an auxiliary network which adds an extra condition.
There are 8 canonical pre-trained ControlNets trained on different conditionings such as edge detection, scribbles,
depth maps, and semantic segmentations.
See [here](../api/pipelines/controlnet) for more information on how to use it.
## Prompt Weighting
Prompt weighting is a simple technique that puts more attention weight on certain parts of the text
input.
For a more in-detail explanation and examples, see [here](../using-diffusers/weighted_prompts).
## Custom Diffusion
[Custom Diffusion](../training/custom_diffusion) only fine-tunes the cross-attention maps of a pre-trained
text-to-image diffusion model. It also allows for additionally performing textual inversion. It supports
multi-concept training by design. Like DreamBooth and Textual Inversion, Custom Diffusion is also used to
teach a pre-trained text-to-image diffusion model about new concepts to generate outputs involving the
concept(s) of interest.
For more details, check out our [official doc](../training/custom_diffusion).
## Model Editing
[Paper](https://arxiv.org/abs/2303.08084)
The [text-to-image model editing pipeline](../api/pipelines/stable_diffusion/model_editing) helps you mitigate some of the incorrect implicit assumptions a pre-trained text-to-image
diffusion model might make about the subjects present in the input prompt. For example, if you prompt Stable Diffusion to generate images for "A pack of roses", the roses in the generated images
are more likely to be red. This pipeline helps you change that assumption.
To know more details, check out the [official doc](../api/pipelines/stable_diffusion/model_editing).
## DiffEdit
[Paper](https://arxiv.org/abs/2210.11427)
[DiffEdit](../api/pipelines/stable_diffusion/diffedit) allows for semantic editing of input images along with
input prompts while preserving the original input images as much as possible.
To know more details, check out the [official doc](../api/pipelines/stable_diffusion/model_editing).
## T2I-Adapter
[Paper](https://arxiv.org/abs/2302.08453)
[T2I-Adapter](../api/pipelines/stable_diffusion/adapter) is an auxiliary network which adds an extra condition.
There are 8 canonical pre-trained adapters trained on different conditionings such as edge detection, sketch,
depth maps, and semantic segmentations.
See [here](../api/pipelines/stable_diffusion/adapter) for more information on how to use it.
| 0 |
hf_public_repos/diffusers/docs/source/en | hf_public_repos/diffusers/docs/source/en/using-diffusers/unconditional_image_generation.md | <!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# Unconditional image generation
[[open-in-colab]]
Unconditional image generation is a relatively straightforward task. The model only generates images - without any additional context like text or an image - resembling the training data it was trained on.
The [`DiffusionPipeline`] is the easiest way to use a pre-trained diffusion system for inference.
Start by creating an instance of [`DiffusionPipeline`] and specify which pipeline checkpoint you would like to download.
You can use any of the 🧨 Diffusers [checkpoints](https://huggingface.co/models?library=diffusers&sort=downloads) from the Hub (the checkpoint you'll use generates images of butterflies).
<Tip>
💡 Want to train your own unconditional image generation model? Take a look at the training [guide](training/unconditional_training) to learn how to generate your own images.
</Tip>
In this guide, you'll use [`DiffusionPipeline`] for unconditional image generation with [DDPM](https://arxiv.org/abs/2006.11239):
```python
>>> from diffusers import DiffusionPipeline
>>> generator = DiffusionPipeline.from_pretrained("anton-l/ddpm-butterflies-128")
```
The [`DiffusionPipeline`] downloads and caches all modeling, tokenization, and scheduling components.
Because the model consists of roughly 1.4 billion parameters, we strongly recommend running it on a GPU.
You can move the generator object to a GPU, just like you would in PyTorch:
```python
>>> generator.to("cuda")
```
Now you can use the `generator` to generate an image:
```python
>>> image = generator().images[0]
```
The output is by default wrapped into a [`PIL.Image`](https://pillow.readthedocs.io/en/stable/reference/Image.html?highlight=image#the-image-class) object.
You can save the image by calling:
```python
>>> image.save("generated_image.png")
```
Try out the Spaces below, and feel free to play around with the inference steps parameter to see how it affects the image quality!
<iframe
src="https://stevhliu-ddpm-butterflies-128.hf.space"
frameborder="0"
width="850"
height="500"
></iframe>
| 0 |
hf_public_repos/diffusers/docs/source/en | hf_public_repos/diffusers/docs/source/en/using-diffusers/custom_pipeline_examples.md | <!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# Community pipelines
[[open-in-colab]]
> **For more information about community pipelines, please have a look at [this issue](https://github.com/huggingface/diffusers/issues/841).**
**Community** examples consist of both inference and training examples that have been added by the community.
Please have a look at the following table to get an overview of all community examples. Click on the **Code Example** to get a copy-and-paste ready code example that you can try out.
If a community doesn't work as expected, please open an issue and ping the author on it.
| Example | Description | Code Example | Colab | Author |
|:---------------------------------------|:---------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|:------------------------------------------------------------------|:-------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|-----------------------------------------------------------:|
| CLIP Guided Stable Diffusion | Doing CLIP guidance for text to image generation with Stable Diffusion | [CLIP Guided Stable Diffusion](#clip-guided-stable-diffusion) | [](https://colab.research.google.com/github/huggingface/notebooks/blob/main/diffusers/CLIP_Guided_Stable_diffusion_with_diffusers.ipynb) | [Suraj Patil](https://github.com/patil-suraj/) |
| One Step U-Net (Dummy) | Example showcasing of how to use Community Pipelines (see https://github.com/huggingface/diffusers/issues/841) | [One Step U-Net](#one-step-unet) | - | [Patrick von Platen](https://github.com/patrickvonplaten/) |
| Stable Diffusion Interpolation | Interpolate the latent space of Stable Diffusion between different prompts/seeds | [Stable Diffusion Interpolation](#stable-diffusion-interpolation) | - | [Nate Raw](https://github.com/nateraw/) |
| Stable Diffusion Mega | **One** Stable Diffusion Pipeline with all functionalities of [Text2Image](https://github.com/huggingface/diffusers/blob/main/src/diffusers/pipelines/stable_diffusion/pipeline_stable_diffusion.py), [Image2Image](https://github.com/huggingface/diffusers/blob/main/src/diffusers/pipelines/stable_diffusion/pipeline_stable_diffusion_img2img.py) and [Inpainting](https://github.com/huggingface/diffusers/blob/main/src/diffusers/pipelines/stable_diffusion/pipeline_stable_diffusion_inpaint.py) | [Stable Diffusion Mega](#stable-diffusion-mega) | - | [Patrick von Platen](https://github.com/patrickvonplaten/) |
| Long Prompt Weighting Stable Diffusion | **One** Stable Diffusion Pipeline without tokens length limit, and support parsing weighting in prompt. | [Long Prompt Weighting Stable Diffusion](#long-prompt-weighting-stable-diffusion) | - | [SkyTNT](https://github.com/SkyTNT) |
| Speech to Image | Using automatic-speech-recognition to transcribe text and Stable Diffusion to generate images | [Speech to Image](#speech-to-image) | - | [Mikail Duzenli](https://github.com/MikailINTech)
To load a custom pipeline you just need to pass the `custom_pipeline` argument to `DiffusionPipeline`, as one of the files in `diffusers/examples/community`. Feel free to send a PR with your own pipelines, we will merge them quickly.
```py
pipe = DiffusionPipeline.from_pretrained(
"CompVis/stable-diffusion-v1-4", custom_pipeline="filename_in_the_community_folder"
)
```
## Example usages
### CLIP Guided Stable Diffusion
CLIP guided stable diffusion can help to generate more realistic images
by guiding stable diffusion at every denoising step with an additional CLIP model.
The following code requires roughly 12GB of GPU RAM.
```python
from diffusers import DiffusionPipeline
from transformers import CLIPImageProcessor, CLIPModel
import torch
feature_extractor = CLIPImageProcessor.from_pretrained("laion/CLIP-ViT-B-32-laion2B-s34B-b79K")
clip_model = CLIPModel.from_pretrained("laion/CLIP-ViT-B-32-laion2B-s34B-b79K", torch_dtype=torch.float16)
guided_pipeline = DiffusionPipeline.from_pretrained(
"CompVis/stable-diffusion-v1-4",
custom_pipeline="clip_guided_stable_diffusion",
clip_model=clip_model,
feature_extractor=feature_extractor,
torch_dtype=torch.float16,
)
guided_pipeline.enable_attention_slicing()
guided_pipeline = guided_pipeline.to("cuda")
prompt = "fantasy book cover, full moon, fantasy forest landscape, golden vector elements, fantasy magic, dark light night, intricate, elegant, sharp focus, illustration, highly detailed, digital painting, concept art, matte, art by WLOP and Artgerm and Albert Bierstadt, masterpiece"
generator = torch.Generator(device="cuda").manual_seed(0)
images = []
for i in range(4):
image = guided_pipeline(
prompt,
num_inference_steps=50,
guidance_scale=7.5,
clip_guidance_scale=100,
num_cutouts=4,
use_cutouts=False,
generator=generator,
).images[0]
images.append(image)
# save images locally
for i, img in enumerate(images):
img.save(f"./clip_guided_sd/image_{i}.png")
```
The `images` list contains a list of PIL images that can be saved locally or displayed directly in a google colab.
Generated images tend to be of higher qualtiy than natively using stable diffusion. E.g. the above script generates the following images:
.
### One Step Unet
The dummy "one-step-unet" can be run as follows:
```python
from diffusers import DiffusionPipeline
pipe = DiffusionPipeline.from_pretrained("google/ddpm-cifar10-32", custom_pipeline="one_step_unet")
pipe()
```
**Note**: This community pipeline is not useful as a feature, but rather just serves as an example of how community pipelines can be added (see https://github.com/huggingface/diffusers/issues/841).
### Stable Diffusion Interpolation
The following code can be run on a GPU of at least 8GB VRAM and should take approximately 5 minutes.
```python
from diffusers import DiffusionPipeline
import torch
pipe = DiffusionPipeline.from_pretrained(
"CompVis/stable-diffusion-v1-4",
torch_dtype=torch.float16,
safety_checker=None, # Very important for videos...lots of false positives while interpolating
custom_pipeline="interpolate_stable_diffusion",
).to("cuda")
pipe.enable_attention_slicing()
frame_filepaths = pipe.walk(
prompts=["a dog", "a cat", "a horse"],
seeds=[42, 1337, 1234],
num_interpolation_steps=16,
output_dir="./dreams",
batch_size=4,
height=512,
width=512,
guidance_scale=8.5,
num_inference_steps=50,
)
```
The output of the `walk(...)` function returns a list of images saved under the folder as defined in `output_dir`. You can use these images to create videos of stable diffusion.
> **Please have a look at https://github.com/nateraw/stable-diffusion-videos for more in-detail information on how to create videos using stable diffusion as well as more feature-complete functionality.**
### Stable Diffusion Mega
The Stable Diffusion Mega Pipeline lets you use the main use cases of the stable diffusion pipeline in a single class.
```python
#!/usr/bin/env python3
from diffusers import DiffusionPipeline
import PIL
import requests
from io import BytesIO
import torch
def download_image(url):
response = requests.get(url)
return PIL.Image.open(BytesIO(response.content)).convert("RGB")
pipe = DiffusionPipeline.from_pretrained(
"CompVis/stable-diffusion-v1-4",
custom_pipeline="stable_diffusion_mega",
torch_dtype=torch.float16,
)
pipe.to("cuda")
pipe.enable_attention_slicing()
### Text-to-Image
images = pipe.text2img("An astronaut riding a horse").images
### Image-to-Image
init_image = download_image(
"https://raw.githubusercontent.com/CompVis/stable-diffusion/main/assets/stable-samples/img2img/sketch-mountains-input.jpg"
)
prompt = "A fantasy landscape, trending on artstation"
images = pipe.img2img(prompt=prompt, image=init_image, strength=0.75, guidance_scale=7.5).images
### Inpainting
img_url = "https://raw.githubusercontent.com/CompVis/latent-diffusion/main/data/inpainting_examples/overture-creations-5sI6fQgYIuo.png"
mask_url = "https://raw.githubusercontent.com/CompVis/latent-diffusion/main/data/inpainting_examples/overture-creations-5sI6fQgYIuo_mask.png"
init_image = download_image(img_url).resize((512, 512))
mask_image = download_image(mask_url).resize((512, 512))
prompt = "a cat sitting on a bench"
images = pipe.inpaint(prompt=prompt, image=init_image, mask_image=mask_image, strength=0.75).images
```
As shown above this one pipeline can run all both "text-to-image", "image-to-image", and "inpainting" in one pipeline.
### Long Prompt Weighting Stable Diffusion
The Pipeline lets you input prompt without 77 token length limit. And you can increase words weighting by using "()" or decrease words weighting by using "[]"
The Pipeline also lets you use the main use cases of the stable diffusion pipeline in a single class.
#### pytorch
```python
from diffusers import DiffusionPipeline
import torch
pipe = DiffusionPipeline.from_pretrained(
"hakurei/waifu-diffusion", custom_pipeline="lpw_stable_diffusion", torch_dtype=torch.float16
)
pipe = pipe.to("cuda")
prompt = "best_quality (1girl:1.3) bow bride brown_hair closed_mouth frilled_bow frilled_hair_tubes frills (full_body:1.3) fox_ear hair_bow hair_tubes happy hood japanese_clothes kimono long_sleeves red_bow smile solo tabi uchikake white_kimono wide_sleeves cherry_blossoms"
neg_prompt = "lowres, bad_anatomy, error_body, error_hair, error_arm, error_hands, bad_hands, error_fingers, bad_fingers, missing_fingers, error_legs, bad_legs, multiple_legs, missing_legs, error_lighting, error_shadow, error_reflection, text, error, extra_digit, fewer_digits, cropped, worst_quality, low_quality, normal_quality, jpeg_artifacts, signature, watermark, username, blurry"
pipe.text2img(prompt, negative_prompt=neg_prompt, width=512, height=512, max_embeddings_multiples=3).images[0]
```
#### onnxruntime
```python
from diffusers import DiffusionPipeline
import torch
pipe = DiffusionPipeline.from_pretrained(
"CompVis/stable-diffusion-v1-4",
custom_pipeline="lpw_stable_diffusion_onnx",
revision="onnx",
provider="CUDAExecutionProvider",
)
prompt = "a photo of an astronaut riding a horse on mars, best quality"
neg_prompt = "lowres, bad anatomy, error body, error hair, error arm, error hands, bad hands, error fingers, bad fingers, missing fingers, error legs, bad legs, multiple legs, missing legs, error lighting, error shadow, error reflection, text, error, extra digit, fewer digits, cropped, worst quality, low quality, normal quality, jpeg artifacts, signature, watermark, username, blurry"
pipe.text2img(prompt, negative_prompt=neg_prompt, width=512, height=512, max_embeddings_multiples=3).images[0]
```
if you see `Token indices sequence length is longer than the specified maximum sequence length for this model ( *** > 77 ) . Running this sequence through the model will result in indexing errors`. Do not worry, it is normal.
### Speech to Image
The following code can generate an image from an audio sample using pre-trained OpenAI whisper-small and Stable Diffusion.
```Python
import torch
import matplotlib.pyplot as plt
from datasets import load_dataset
from diffusers import DiffusionPipeline
from transformers import (
WhisperForConditionalGeneration,
WhisperProcessor,
)
device = "cuda" if torch.cuda.is_available() else "cpu"
ds = load_dataset("hf-internal-testing/librispeech_asr_dummy", "clean", split="validation")
audio_sample = ds[3]
text = audio_sample["text"].lower()
speech_data = audio_sample["audio"]["array"]
model = WhisperForConditionalGeneration.from_pretrained("openai/whisper-small").to(device)
processor = WhisperProcessor.from_pretrained("openai/whisper-small")
diffuser_pipeline = DiffusionPipeline.from_pretrained(
"CompVis/stable-diffusion-v1-4",
custom_pipeline="speech_to_image_diffusion",
speech_model=model,
speech_processor=processor,
torch_dtype=torch.float16,
)
diffuser_pipeline.enable_attention_slicing()
diffuser_pipeline = diffuser_pipeline.to(device)
output = diffuser_pipeline(speech_data)
plt.imshow(output.images[0])
```
This example produces the following image:
 | 0 |
hf_public_repos/diffusers/docs/source/en | hf_public_repos/diffusers/docs/source/en/using-diffusers/using_safetensors.md | # Load safetensors
[[open-in-colab]]
[safetensors](https://github.com/huggingface/safetensors) is a safe and fast file format for storing and loading tensors. Typically, PyTorch model weights are saved or *pickled* into a `.bin` file with Python's [`pickle`](https://docs.python.org/3/library/pickle.html) utility. However, `pickle` is not secure and pickled files may contain malicious code that can be executed. safetensors is a secure alternative to `pickle`, making it ideal for sharing model weights.
This guide will show you how you load `.safetensor` files, and how to convert Stable Diffusion model weights stored in other formats to `.safetensor`. Before you start, make sure you have safetensors installed:
```py
# uncomment to install the necessary libraries in Colab
#!pip install safetensors
```
If you look at the [`runwayml/stable-diffusion-v1-5`](https://huggingface.co/runwayml/stable-diffusion-v1-5/tree/main) repository, you'll see weights inside the `text_encoder`, `unet` and `vae` subfolders are stored in the `.safetensors` format. By default, 🤗 Diffusers automatically loads these `.safetensors` files from their subfolders if they're available in the model repository.
For more explicit control, you can optionally set `use_safetensors=True` (if `safetensors` is not installed, you'll get an error message asking you to install it):
```py
from diffusers import DiffusionPipeline
pipeline = DiffusionPipeline.from_pretrained("runwayml/stable-diffusion-v1-5", use_safetensors=True)
```
However, model weights are not necessarily stored in separate subfolders like in the example above. Sometimes, all the weights are stored in a single `.safetensors` file. In this case, if the weights are Stable Diffusion weights, you can load the file directly with the [`~diffusers.loaders.FromSingleFileMixin.from_single_file`] method:
```py
from diffusers import StableDiffusionPipeline
pipeline = StableDiffusionPipeline.from_single_file(
"https://huggingface.co/WarriorMama777/OrangeMixs/blob/main/Models/AbyssOrangeMix/AbyssOrangeMix.safetensors"
)
```
## Convert to safetensors
Not all weights on the Hub are available in the `.safetensors` format, and you may encounter weights stored as `.bin`. In this case, use the [Convert Space](https://huggingface.co/spaces/diffusers/convert) to convert the weights to `.safetensors`. The Convert Space downloads the pickled weights, converts them, and opens a Pull Request to upload the newly converted `.safetensors` file on the Hub. This way, if there is any malicious code contained in the pickled files, they're uploaded to the Hub - which has a [security scanner](https://huggingface.co/docs/hub/security-pickle#hubs-security-scanner) to detect unsafe files and suspicious pickle imports - instead of your computer.
You can use the model with the new `.safetensors` weights by specifying the reference to the Pull Request in the `revision` parameter (you can also test it in this [Check PR](https://huggingface.co/spaces/diffusers/check_pr) Space on the Hub), for example `refs/pr/22`:
```py
from diffusers import DiffusionPipeline
pipeline = DiffusionPipeline.from_pretrained("stabilityai/stable-diffusion-2-1", revision="refs/pr/22")
```
## Why use safetensors?
There are several reasons for using safetensors:
- Safety is the number one reason for using safetensors. As open-source and model distribution grows, it is important to be able to trust the model weights you downloaded don't contain any malicious code. The current size of the header in safetensors prevents parsing extremely large JSON files.
- Loading speed between switching models is another reason to use safetensors, which performs zero-copy of the tensors. It is especially fast compared to `pickle` if you're loading the weights to CPU (the default case), and just as fast if not faster when directly loading the weights to GPU. You'll only notice the performance difference if the model is already loaded, and not if you're downloading the weights or loading the model for the first time.
The time it takes to load the entire pipeline:
```py
from diffusers import StableDiffusionPipeline
pipeline = StableDiffusionPipeline.from_pretrained("stabilityai/stable-diffusion-2-1")
"Loaded in safetensors 0:00:02.033658"
"Loaded in PyTorch 0:00:02.663379"
```
But the actual time it takes to load 500MB of the model weights is only:
```bash
safetensors: 3.4873ms
PyTorch: 172.7537ms
```
- Lazy loading is also supported in safetensors, which is useful in distributed settings to only load some of the tensors. This format allowed the [BLOOM](https://huggingface.co/bigscience/bloom) model to be loaded in 45 seconds on 8 GPUs instead of 10 minutes with regular PyTorch weights.
| 0 |
hf_public_repos/diffusers/docs/source/en | hf_public_repos/diffusers/docs/source/en/using-diffusers/using_safetensors | # What is safetensors ?
[safetensors](https://github.com/huggingface/safetensors) is a different format
from the classic `.bin` which uses Pytorch which uses pickle.
Pickle is notoriously unsafe which allow any malicious file to execute arbitrary code.
The hub itself tries to prevent issues from it, but it's not a silver bullet.
`safetensors` first and foremost goal is to make loading machine learning models *safe*
in the sense that no takeover of your computer can be done.
# Why use safetensors ?
**Safety** can be one reason, if you're attempting to use a not well known model and
you're not sure about the source of the file.
And a secondary reason, is **the speed of loading**. Safetensors can load models much faster
than regular pickle files. If you spend a lot of times switching models, this can be
a huge timesave.
| 0 |
hf_public_repos/diffusers/docs/source/en | hf_public_repos/diffusers/docs/source/en/using-diffusers/schedulers.md | <!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# Schedulers
[[open-in-colab]]
Diffusion pipelines are inherently a collection of diffusion models and schedulers that are partly independent from each other. This means that one is able to switch out parts of the pipeline to better customize
a pipeline to one's use case. The best example of this is the [Schedulers](../api/schedulers/overview.md).
Whereas diffusion models usually simply define the forward pass from noise to a less noisy sample,
schedulers define the whole denoising process, *i.e.*:
- How many denoising steps?
- Stochastic or deterministic?
- What algorithm to use to find the denoised sample
They can be quite complex and often define a trade-off between **denoising speed** and **denoising quality**.
It is extremely difficult to measure quantitatively which scheduler works best for a given diffusion pipeline, so it is often recommended to simply try out which works best.
The following paragraphs show how to do so with the 🧨 Diffusers library.
## Load pipeline
Let's start by loading the [`runwayml/stable-diffusion-v1-5`](https://huggingface.co/runwayml/stable-diffusion-v1-5) model in the [`DiffusionPipeline`]:
```python
from huggingface_hub import login
from diffusers import DiffusionPipeline
import torch
login()
pipeline = DiffusionPipeline.from_pretrained("runwayml/stable-diffusion-v1-5", torch_dtype=torch.float16)
```
Next, we move it to GPU:
```python
pipeline.to("cuda")
```
## Access the scheduler
The scheduler is always one of the components of the pipeline and is usually called `"scheduler"`.
So it can be accessed via the `"scheduler"` property.
```python
pipeline.scheduler
```
**Output**:
```
PNDMScheduler {
"_class_name": "PNDMScheduler",
"_diffusers_version": "0.8.0.dev0",
"beta_end": 0.012,
"beta_schedule": "scaled_linear",
"beta_start": 0.00085,
"clip_sample": false,
"num_train_timesteps": 1000,
"set_alpha_to_one": false,
"skip_prk_steps": true,
"steps_offset": 1,
"trained_betas": null
}
```
We can see that the scheduler is of type [`PNDMScheduler`].
Cool, now let's compare the scheduler in its performance to other schedulers.
First we define a prompt on which we will test all the different schedulers:
```python
prompt = "A photograph of an astronaut riding a horse on Mars, high resolution, high definition."
```
Next, we create a generator from a random seed that will ensure that we can generate similar images as well as run the pipeline:
```python
generator = torch.Generator(device="cuda").manual_seed(8)
image = pipeline(prompt, generator=generator).images[0]
image
```
<p align="center">
<br>
<img src="https://huggingface.co/datasets/patrickvonplaten/images/resolve/main/diffusers_docs/astronaut_pndm.png" width="400"/>
<br>
</p>
## Changing the scheduler
Now we show how easy it is to change the scheduler of a pipeline. Every scheduler has a property [`SchedulerMixin.compatibles`]
which defines all compatible schedulers. You can take a look at all available, compatible schedulers for the Stable Diffusion pipeline as follows.
```python
pipeline.scheduler.compatibles
```
**Output**:
```
[diffusers.schedulers.scheduling_lms_discrete.LMSDiscreteScheduler,
diffusers.schedulers.scheduling_ddim.DDIMScheduler,
diffusers.schedulers.scheduling_dpmsolver_multistep.DPMSolverMultistepScheduler,
diffusers.schedulers.scheduling_euler_discrete.EulerDiscreteScheduler,
diffusers.schedulers.scheduling_pndm.PNDMScheduler,
diffusers.schedulers.scheduling_ddpm.DDPMScheduler,
diffusers.schedulers.scheduling_euler_ancestral_discrete.EulerAncestralDiscreteScheduler]
```
Cool, lots of schedulers to look at. Feel free to have a look at their respective class definitions:
- [`LMSDiscreteScheduler`],
- [`DDIMScheduler`],
- [`DPMSolverMultistepScheduler`],
- [`EulerDiscreteScheduler`],
- [`PNDMScheduler`],
- [`DDPMScheduler`],
- [`EulerAncestralDiscreteScheduler`].
We will now compare the input prompt with all other schedulers. To change the scheduler of the pipeline you can make use of the
convenient [`ConfigMixin.config`] property in combination with the [`ConfigMixin.from_config`] function.
```python
pipeline.scheduler.config
```
returns a dictionary of the configuration of the scheduler:
**Output**:
```
FrozenDict([('num_train_timesteps', 1000),
('beta_start', 0.00085),
('beta_end', 0.012),
('beta_schedule', 'scaled_linear'),
('trained_betas', None),
('skip_prk_steps', True),
('set_alpha_to_one', False),
('steps_offset', 1),
('_class_name', 'PNDMScheduler'),
('_diffusers_version', '0.8.0.dev0'),
('clip_sample', False)])
```
This configuration can then be used to instantiate a scheduler
of a different class that is compatible with the pipeline. Here,
we change the scheduler to the [`DDIMScheduler`].
```python
from diffusers import DDIMScheduler
pipeline.scheduler = DDIMScheduler.from_config(pipeline.scheduler.config)
```
Cool, now we can run the pipeline again to compare the generation quality.
```python
generator = torch.Generator(device="cuda").manual_seed(8)
image = pipeline(prompt, generator=generator).images[0]
image
```
<p align="center">
<br>
<img src="https://huggingface.co/datasets/patrickvonplaten/images/resolve/main/diffusers_docs/astronaut_ddim.png" width="400"/>
<br>
</p>
If you are a JAX/Flax user, please check [this section](#changing-the-scheduler-in-flax) instead.
## Compare schedulers
So far we have tried running the stable diffusion pipeline with two schedulers: [`PNDMScheduler`] and [`DDIMScheduler`].
A number of better schedulers have been released that can be run with much fewer steps, let's compare them here:
[`LMSDiscreteScheduler`] usually leads to better results:
```python
from diffusers import LMSDiscreteScheduler
pipeline.scheduler = LMSDiscreteScheduler.from_config(pipeline.scheduler.config)
generator = torch.Generator(device="cuda").manual_seed(8)
image = pipeline(prompt, generator=generator).images[0]
image
```
<p align="center">
<br>
<img src="https://huggingface.co/datasets/patrickvonplaten/images/resolve/main/diffusers_docs/astronaut_lms.png" width="400"/>
<br>
</p>
[`EulerDiscreteScheduler`] and [`EulerAncestralDiscreteScheduler`] can generate high quality results with as little as 30 steps.
```python
from diffusers import EulerDiscreteScheduler
pipeline.scheduler = EulerDiscreteScheduler.from_config(pipeline.scheduler.config)
generator = torch.Generator(device="cuda").manual_seed(8)
image = pipeline(prompt, generator=generator, num_inference_steps=30).images[0]
image
```
<p align="center">
<br>
<img src="https://huggingface.co/datasets/patrickvonplaten/images/resolve/main/diffusers_docs/astronaut_euler_discrete.png" width="400"/>
<br>
</p>
and:
```python
from diffusers import EulerAncestralDiscreteScheduler
pipeline.scheduler = EulerAncestralDiscreteScheduler.from_config(pipeline.scheduler.config)
generator = torch.Generator(device="cuda").manual_seed(8)
image = pipeline(prompt, generator=generator, num_inference_steps=30).images[0]
image
```
<p align="center">
<br>
<img src="https://huggingface.co/datasets/patrickvonplaten/images/resolve/main/diffusers_docs/astronaut_euler_ancestral.png" width="400"/>
<br>
</p>
At the time of writing this doc [`DPMSolverMultistepScheduler`] gives arguably the best speed/quality trade-off and can be run with as little
as 20 steps.
```python
from diffusers import DPMSolverMultistepScheduler
pipeline.scheduler = DPMSolverMultistepScheduler.from_config(pipeline.scheduler.config)
generator = torch.Generator(device="cuda").manual_seed(8)
image = pipeline(prompt, generator=generator, num_inference_steps=20).images[0]
image
```
<p align="center">
<br>
<img src="https://huggingface.co/datasets/patrickvonplaten/images/resolve/main/diffusers_docs/astronaut_dpm.png" width="400"/>
<br>
</p>
As you can see most images look very similar and are arguably of very similar quality. It often really depends on the specific use case which scheduler to choose. A good approach is always to run multiple different
schedulers to compare results.
## Changing the Scheduler in Flax
If you are a JAX/Flax user, you can also change the default pipeline scheduler. This is a complete example of how to run inference using the Flax Stable Diffusion pipeline and the super-fast [DDPM-Solver++ scheduler](../api/schedulers/multistep_dpm_solver):
```Python
import jax
import numpy as np
from flax.jax_utils import replicate
from flax.training.common_utils import shard
from diffusers import FlaxStableDiffusionPipeline, FlaxDPMSolverMultistepScheduler
model_id = "runwayml/stable-diffusion-v1-5"
scheduler, scheduler_state = FlaxDPMSolverMultistepScheduler.from_pretrained(
model_id,
subfolder="scheduler"
)
pipeline, params = FlaxStableDiffusionPipeline.from_pretrained(
model_id,
scheduler=scheduler,
revision="bf16",
dtype=jax.numpy.bfloat16,
)
params["scheduler"] = scheduler_state
# Generate 1 image per parallel device (8 on TPUv2-8 or TPUv3-8)
prompt = "a photo of an astronaut riding a horse on mars"
num_samples = jax.device_count()
prompt_ids = pipeline.prepare_inputs([prompt] * num_samples)
prng_seed = jax.random.PRNGKey(0)
num_inference_steps = 25
# shard inputs and rng
params = replicate(params)
prng_seed = jax.random.split(prng_seed, jax.device_count())
prompt_ids = shard(prompt_ids)
images = pipeline(prompt_ids, params, prng_seed, num_inference_steps, jit=True).images
images = pipeline.numpy_to_pil(np.asarray(images.reshape((num_samples,) + images.shape[-3:])))
```
<Tip warning={true}>
The following Flax schedulers are _not yet compatible_ with the Flax Stable Diffusion Pipeline:
- `FlaxLMSDiscreteScheduler`
- `FlaxDDPMScheduler`
</Tip>
| 0 |
hf_public_repos/diffusers/docs/source/en | hf_public_repos/diffusers/docs/source/en/using-diffusers/conditional_image_generation.md | <!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# Conditional image generation
[[open-in-colab]]
Conditional image generation allows you to generate images from a text prompt. The text is converted into embeddings which are used to condition the model to generate an image from noise.
The [`DiffusionPipeline`] is the easiest way to use a pre-trained diffusion system for inference.
Start by creating an instance of [`DiffusionPipeline`] and specify which pipeline [checkpoint](https://huggingface.co/models?library=diffusers&sort=downloads) you would like to download.
In this guide, you'll use [`DiffusionPipeline`] for text-to-image generation with [`runwayml/stable-diffusion-v1-5`](https://huggingface.co/runwayml/stable-diffusion-v1-5):
```python
>>> from diffusers import DiffusionPipeline
>>> generator = DiffusionPipeline.from_pretrained("runwayml/stable-diffusion-v1-5")
```
The [`DiffusionPipeline`] downloads and caches all modeling, tokenization, and scheduling components.
Because the model consists of roughly 1.4 billion parameters, we strongly recommend running it on a GPU.
You can move the generator object to a GPU, just like you would in PyTorch:
```python
>>> generator.to("cuda")
```
Now you can use the `generator` on your text prompt:
```python
>>> image = generator("An image of a squirrel in Picasso style").images[0]
```
The output is by default wrapped into a [`PIL.Image`](https://pillow.readthedocs.io/en/stable/reference/Image.html?highlight=image#the-image-class) object.
You can save the image by calling:
```python
>>> image.save("image_of_squirrel_painting.png")
```
Try out the Spaces below, and feel free to play around with the guidance scale parameter to see how it affects the image quality!
<iframe
src="https://stabilityai-stable-diffusion.hf.space"
frameborder="0"
width="850"
height="500"
></iframe> | 0 |
hf_public_repos/diffusers/docs/source/en | hf_public_repos/diffusers/docs/source/en/using-diffusers/write_own_pipeline.md | <!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# Understanding pipelines, models and schedulers
[[open-in-colab]]
🧨 Diffusers is designed to be a user-friendly and flexible toolbox for building diffusion systems tailored to your use-case. At the core of the toolbox are models and schedulers. While the [`DiffusionPipeline`] bundles these components together for convenience, you can also unbundle the pipeline and use the models and schedulers separately to create new diffusion systems.
In this tutorial, you'll learn how to use models and schedulers to assemble a diffusion system for inference, starting with a basic pipeline and then progressing to the Stable Diffusion pipeline.
## Deconstruct a basic pipeline
A pipeline is a quick and easy way to run a model for inference, requiring no more than four lines of code to generate an image:
```py
>>> from diffusers import DDPMPipeline
>>> ddpm = DDPMPipeline.from_pretrained("google/ddpm-cat-256").to("cuda")
>>> image = ddpm(num_inference_steps=25).images[0]
>>> image
```
<div class="flex justify-center">
<img src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/ddpm-cat.png" alt="Image of cat created from DDPMPipeline"/>
</div>
That was super easy, but how did the pipeline do that? Let's breakdown the pipeline and take a look at what's happening under the hood.
In the example above, the pipeline contains a [`UNet2DModel`] model and a [`DDPMScheduler`]. The pipeline denoises an image by taking random noise the size of the desired output and passing it through the model several times. At each timestep, the model predicts the *noise residual* and the scheduler uses it to predict a less noisy image. The pipeline repeats this process until it reaches the end of the specified number of inference steps.
To recreate the pipeline with the model and scheduler separately, let's write our own denoising process.
1. Load the model and scheduler:
```py
>>> from diffusers import DDPMScheduler, UNet2DModel
>>> scheduler = DDPMScheduler.from_pretrained("google/ddpm-cat-256")
>>> model = UNet2DModel.from_pretrained("google/ddpm-cat-256").to("cuda")
```
2. Set the number of timesteps to run the denoising process for:
```py
>>> scheduler.set_timesteps(50)
```
3. Setting the scheduler timesteps creates a tensor with evenly spaced elements in it, 50 in this example. Each element corresponds to a timestep at which the model denoises an image. When you create the denoising loop later, you'll iterate over this tensor to denoise an image:
```py
>>> scheduler.timesteps
tensor([980, 960, 940, 920, 900, 880, 860, 840, 820, 800, 780, 760, 740, 720,
700, 680, 660, 640, 620, 600, 580, 560, 540, 520, 500, 480, 460, 440,
420, 400, 380, 360, 340, 320, 300, 280, 260, 240, 220, 200, 180, 160,
140, 120, 100, 80, 60, 40, 20, 0])
```
4. Create some random noise with the same shape as the desired output:
```py
>>> import torch
>>> sample_size = model.config.sample_size
>>> noise = torch.randn((1, 3, sample_size, sample_size)).to("cuda")
```
5. Now write a loop to iterate over the timesteps. At each timestep, the model does a [`UNet2DModel.forward`] pass and returns the noisy residual. The scheduler's [`~DDPMScheduler.step`] method takes the noisy residual, timestep, and input and it predicts the image at the previous timestep. This output becomes the next input to the model in the denoising loop, and it'll repeat until it reaches the end of the `timesteps` array.
```py
>>> input = noise
>>> for t in scheduler.timesteps:
... with torch.no_grad():
... noisy_residual = model(input, t).sample
... previous_noisy_sample = scheduler.step(noisy_residual, t, input).prev_sample
... input = previous_noisy_sample
```
This is the entire denoising process, and you can use this same pattern to write any diffusion system.
6. The last step is to convert the denoised output into an image:
```py
>>> from PIL import Image
>>> import numpy as np
>>> image = (input / 2 + 0.5).clamp(0, 1)
>>> image = image.cpu().permute(0, 2, 3, 1).numpy()[0]
>>> image = Image.fromarray((image * 255).round().astype("uint8"))
>>> image
```
In the next section, you'll put your skills to the test and breakdown the more complex Stable Diffusion pipeline. The steps are more or less the same. You'll initialize the necessary components, and set the number of timesteps to create a `timestep` array. The `timestep` array is used in the denoising loop, and for each element in this array, the model predicts a less noisy image. The denoising loop iterates over the `timestep`'s, and at each timestep, it outputs a noisy residual and the scheduler uses it to predict a less noisy image at the previous timestep. This process is repeated until you reach the end of the `timestep` array.
Let's try it out!
## Deconstruct the Stable Diffusion pipeline
Stable Diffusion is a text-to-image *latent diffusion* model. It is called a latent diffusion model because it works with a lower-dimensional representation of the image instead of the actual pixel space, which makes it more memory efficient. The encoder compresses the image into a smaller representation, and a decoder to convert the compressed representation back into an image. For text-to-image models, you'll need a tokenizer and an encoder to generate text embeddings. From the previous example, you already know you need a UNet model and a scheduler.
As you can see, this is already more complex than the DDPM pipeline which only contains a UNet model. The Stable Diffusion model has three separate pretrained models.
<Tip>
💡 Read the [How does Stable Diffusion work?](https://huggingface.co/blog/stable_diffusion#how-does-stable-diffusion-work) blog for more details about how the VAE, UNet, and text encoder models.
</Tip>
Now that you know what you need for the Stable Diffusion pipeline, load all these components with the [`~ModelMixin.from_pretrained`] method. You can find them in the pretrained [`runwayml/stable-diffusion-v1-5`](https://huggingface.co/runwayml/stable-diffusion-v1-5) checkpoint, and each component is stored in a separate subfolder:
```py
>>> from PIL import Image
>>> import torch
>>> from transformers import CLIPTextModel, CLIPTokenizer
>>> from diffusers import AutoencoderKL, UNet2DConditionModel, PNDMScheduler
>>> vae = AutoencoderKL.from_pretrained("CompVis/stable-diffusion-v1-4", subfolder="vae")
>>> tokenizer = CLIPTokenizer.from_pretrained("CompVis/stable-diffusion-v1-4", subfolder="tokenizer")
>>> text_encoder = CLIPTextModel.from_pretrained("CompVis/stable-diffusion-v1-4", subfolder="text_encoder")
>>> unet = UNet2DConditionModel.from_pretrained("CompVis/stable-diffusion-v1-4", subfolder="unet")
```
Instead of the default [`PNDMScheduler`], exchange it for the [`UniPCMultistepScheduler`] to see how easy it is to plug a different scheduler in:
```py
>>> from diffusers import UniPCMultistepScheduler
>>> scheduler = UniPCMultistepScheduler.from_pretrained("CompVis/stable-diffusion-v1-4", subfolder="scheduler")
```
To speed up inference, move the models to a GPU since, unlike the scheduler, they have trainable weights:
```py
>>> torch_device = "cuda"
>>> vae.to(torch_device)
>>> text_encoder.to(torch_device)
>>> unet.to(torch_device)
```
### Create text embeddings
The next step is to tokenize the text to generate embeddings. The text is used to condition the UNet model and steer the diffusion process towards something that resembles the input prompt.
<Tip>
💡 The `guidance_scale` parameter determines how much weight should be given to the prompt when generating an image.
</Tip>
Feel free to choose any prompt you like if you want to generate something else!
```py
>>> prompt = ["a photograph of an astronaut riding a horse"]
>>> height = 512 # default height of Stable Diffusion
>>> width = 512 # default width of Stable Diffusion
>>> num_inference_steps = 25 # Number of denoising steps
>>> guidance_scale = 7.5 # Scale for classifier-free guidance
>>> generator = torch.manual_seed(0) # Seed generator to create the inital latent noise
>>> batch_size = len(prompt)
```
Tokenize the text and generate the embeddings from the prompt:
```py
>>> text_input = tokenizer(
... prompt, padding="max_length", max_length=tokenizer.model_max_length, truncation=True, return_tensors="pt"
... )
>>> with torch.no_grad():
... text_embeddings = text_encoder(text_input.input_ids.to(torch_device))[0]
```
You'll also need to generate the *unconditional text embeddings* which are the embeddings for the padding token. These need to have the same shape (`batch_size` and `seq_length`) as the conditional `text_embeddings`:
```py
>>> max_length = text_input.input_ids.shape[-1]
>>> uncond_input = tokenizer([""] * batch_size, padding="max_length", max_length=max_length, return_tensors="pt")
>>> uncond_embeddings = text_encoder(uncond_input.input_ids.to(torch_device))[0]
```
Let's concatenate the conditional and unconditional embeddings into a batch to avoid doing two forward passes:
```py
>>> text_embeddings = torch.cat([uncond_embeddings, text_embeddings])
```
### Create random noise
Next, generate some initial random noise as a starting point for the diffusion process. This is the latent representation of the image, and it'll be gradually denoised. At this point, the `latent` image is smaller than the final image size but that's okay though because the model will transform it into the final 512x512 image dimensions later.
<Tip>
💡 The height and width are divided by 8 because the `vae` model has 3 down-sampling layers. You can check by running the following:
```py
2 ** (len(vae.config.block_out_channels) - 1) == 8
```
</Tip>
```py
>>> latents = torch.randn(
... (batch_size, unet.in_channels, height // 8, width // 8),
... generator=generator,
... )
>>> latents = latents.to(torch_device)
```
### Denoise the image
Start by scaling the input with the initial noise distribution, *sigma*, the noise scale value, which is required for improved schedulers like [`UniPCMultistepScheduler`]:
```py
>>> latents = latents * scheduler.init_noise_sigma
```
The last step is to create the denoising loop that'll progressively transform the pure noise in `latents` to an image described by your prompt. Remember, the denoising loop needs to do three things:
1. Set the scheduler's timesteps to use during denoising.
2. Iterate over the timesteps.
3. At each timestep, call the UNet model to predict the noise residual and pass it to the scheduler to compute the previous noisy sample.
```py
>>> from tqdm.auto import tqdm
>>> scheduler.set_timesteps(num_inference_steps)
>>> for t in tqdm(scheduler.timesteps):
... # expand the latents if we are doing classifier-free guidance to avoid doing two forward passes.
... latent_model_input = torch.cat([latents] * 2)
... latent_model_input = scheduler.scale_model_input(latent_model_input, timestep=t)
... # predict the noise residual
... with torch.no_grad():
... noise_pred = unet(latent_model_input, t, encoder_hidden_states=text_embeddings).sample
... # perform guidance
... noise_pred_uncond, noise_pred_text = noise_pred.chunk(2)
... noise_pred = noise_pred_uncond + guidance_scale * (noise_pred_text - noise_pred_uncond)
... # compute the previous noisy sample x_t -> x_t-1
... latents = scheduler.step(noise_pred, t, latents).prev_sample
```
### Decode the image
The final step is to use the `vae` to decode the latent representation into an image and get the decoded output with `sample`:
```py
# scale and decode the image latents with vae
latents = 1 / 0.18215 * latents
with torch.no_grad():
image = vae.decode(latents).sample
```
Lastly, convert the image to a `PIL.Image` to see your generated image!
```py
>>> image = (image / 2 + 0.5).clamp(0, 1)
>>> image = image.detach().cpu().permute(0, 2, 3, 1).numpy()
>>> images = (image * 255).round().astype("uint8")
>>> pil_images = [Image.fromarray(image) for image in images]
>>> pil_images[0]
```
<div class="flex justify-center">
<img src="https://huggingface.co/blog/assets/98_stable_diffusion/stable_diffusion_k_lms.png"/>
</div>
## Next steps
From basic to complex pipelines, you've seen that all you really need to write your own diffusion system is a denoising loop. The loop should set the scheduler's timesteps, iterate over them, and alternate between calling the UNet model to predict the noise residual and passing it to the scheduler to compute the previous noisy sample.
This is really what 🧨 Diffusers is designed for: to make it intuitive and easy to write your own diffusion system using models and schedulers.
For your next steps, feel free to:
* Learn how to [build and contribute a pipeline](contribute_pipeline) to 🧨 Diffusers. We can't wait and see what you'll come up with!
* Explore [existing pipelines](../api/pipelines/overview) in the library, and see if you can deconstruct and build a pipeline from scratch using the models and schedulers separately.
| 0 |
hf_public_repos/diffusers/docs/source/en | hf_public_repos/diffusers/docs/source/en/using-diffusers/textual_inversion_inference.md | # Textual inversion
[[open-in-colab]]
The [`StableDiffusionPipeline`] supports textual inversion, a technique that enables a model like Stable Diffusion to learn a new concept from just a few sample images. This gives you more control over the generated images and allows you to tailor the model towards specific concepts. You can get started quickly with a collection of community created concepts in the [Stable Diffusion Conceptualizer](https://huggingface.co/spaces/sd-concepts-library/stable-diffusion-conceptualizer).
This guide will show you how to run inference with textual inversion using a pre-learned concept from the Stable Diffusion Conceptualizer. If you're interested in teaching a model new concepts with textual inversion, take a look at the [Textual Inversion](./training/text_inversion) training guide.
Login to your Hugging Face account:
```py
from huggingface_hub import notebook_login
notebook_login()
```
Import the necessary libraries, and create a helper function to visualize the generated images:
```py
import os
import torch
import PIL
from PIL import Image
from diffusers import StableDiffusionPipeline
from transformers import CLIPFeatureExtractor, CLIPTextModel, CLIPTokenizer
def image_grid(imgs, rows, cols):
assert len(imgs) == rows * cols
w, h = imgs[0].size
grid = Image.new("RGB", size=(cols * w, rows * h))
grid_w, grid_h = grid.size
for i, img in enumerate(imgs):
grid.paste(img, box=(i % cols * w, i // cols * h))
return grid
```
Pick a Stable Diffusion checkpoint and a pre-learned concept from the [Stable Diffusion Conceptualizer](https://huggingface.co/spaces/sd-concepts-library/stable-diffusion-conceptualizer):
```py
pretrained_model_name_or_path = "runwayml/stable-diffusion-v1-5"
repo_id_embeds = "sd-concepts-library/cat-toy"
```
Now you can load a pipeline, and pass the pre-learned concept to it:
```py
pipeline = StableDiffusionPipeline.from_pretrained(pretrained_model_name_or_path, torch_dtype=torch.float16).to("cuda")
pipeline.load_textual_inversion(repo_id_embeds)
```
Create a prompt with the pre-learned concept by using the special placeholder token `<cat-toy>`, and choose the number of samples and rows of images you'd like to generate:
```py
prompt = "a grafitti in a favela wall with a <cat-toy> on it"
num_samples = 2
num_rows = 2
```
Then run the pipeline (feel free to adjust the parameters like `num_inference_steps` and `guidance_scale` to see how they affect image quality), save the generated images and visualize them with the helper function you created at the beginning:
```py
all_images = []
for _ in range(num_rows):
images = pipe(prompt, num_images_per_prompt=num_samples, num_inference_steps=50, guidance_scale=7.5).images
all_images.extend(images)
grid = image_grid(all_images, num_samples, num_rows)
grid
```
<div class="flex justify-center">
<img src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/textual_inversion_inference.png">
</div>
| 0 |
hf_public_repos/diffusers/docs/source/en | hf_public_repos/diffusers/docs/source/en/using-diffusers/control_brightness.md | # Control image brightness
The Stable Diffusion pipeline is mediocre at generating images that are either very bright or dark as explained in the [Common Diffusion Noise Schedules and Sample Steps are Flawed](https://huggingface.co/papers/2305.08891) paper. The solutions proposed in the paper are currently implemented in the [`DDIMScheduler`] which you can use to improve the lighting in your images.
<Tip>
💡 Take a look at the paper linked above for more details about the proposed solutions!
</Tip>
One of the solutions is to train a model with *v prediction* and *v loss*. Add the following flag to the [`train_text_to_image.py`](https://github.com/huggingface/diffusers/blob/main/examples/text_to_image/train_text_to_image.py) or [`train_text_to_image_lora.py`](https://github.com/huggingface/diffusers/blob/main/examples/text_to_image/train_text_to_image_lora.py) scripts to enable `v_prediction`:
```bash
--prediction_type="v_prediction"
```
For example, let's use the [`ptx0/pseudo-journey-v2`](https://huggingface.co/ptx0/pseudo-journey-v2) checkpoint which has been finetuned with `v_prediction`.
Next, configure the following parameters in the [`DDIMScheduler`]:
1. `rescale_betas_zero_snr=True`, rescales the noise schedule to zero terminal signal-to-noise ratio (SNR)
2. `timestep_spacing="trailing"`, starts sampling from the last timestep
```py
>>> from diffusers import DiffusionPipeline, DDIMScheduler
>>> pipeline = DiffusionPipeline.from_pretrained("ptx0/pseudo-journey-v2")
# switch the scheduler in the pipeline to use the DDIMScheduler
>>> pipeline.scheduler = DDIMScheduler.from_config(
... pipeline.scheduler.config, rescale_betas_zero_snr=True, timestep_spacing="trailing"
... )
>>> pipeline.to("cuda")
```
Finally, in your call to the pipeline, set `guidance_rescale` to prevent overexposure:
```py
prompt = "A lion in galaxies, spirals, nebulae, stars, smoke, iridescent, intricate detail, octane render, 8k"
image = pipeline(prompt, guidance_rescale=0.7).images[0]
```
<div class="flex justify-center">
<img src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/zero_snr.png"/>
</div>
| 0 |
hf_public_repos/diffusers/docs/source/en | hf_public_repos/diffusers/docs/source/en/using-diffusers/loading.md | <!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# Load pipelines, models, and schedulers
[[open-in-colab]]
Having an easy way to use a diffusion system for inference is essential to 🧨 Diffusers. Diffusion systems often consist of multiple components like parameterized models, tokenizers, and schedulers that interact in complex ways. That is why we designed the [`DiffusionPipeline`] to wrap the complexity of the entire diffusion system into an easy-to-use API, while remaining flexible enough to be adapted for other use cases, such as loading each component individually as building blocks to assemble your own diffusion system.
Everything you need for inference or training is accessible with the `from_pretrained()` method.
This guide will show you how to load:
- pipelines from the Hub and locally
- different components into a pipeline
- checkpoint variants such as different floating point types or non-exponential mean averaged (EMA) weights
- models and schedulers
## Diffusion Pipeline
<Tip>
💡 Skip to the [DiffusionPipeline explained](#diffusionpipeline-explained) section if you interested in learning in more detail about how the [`DiffusionPipeline`] class works.
</Tip>
The [`DiffusionPipeline`] class is the simplest and most generic way to load any diffusion model from the [Hub](https://huggingface.co/models?library=diffusers). The [`DiffusionPipeline.from_pretrained`] method automatically detects the correct pipeline class from the checkpoint, downloads and caches all the required configuration and weight files, and returns a pipeline instance ready for inference.
```python
from diffusers import DiffusionPipeline
repo_id = "runwayml/stable-diffusion-v1-5"
pipe = DiffusionPipeline.from_pretrained(repo_id)
```
You can also load a checkpoint with it's specific pipeline class. The example above loaded a Stable Diffusion model; to get the same result, use the [`StableDiffusionPipeline`] class:
```python
from diffusers import StableDiffusionPipeline
repo_id = "runwayml/stable-diffusion-v1-5"
pipe = StableDiffusionPipeline.from_pretrained(repo_id)
```
A checkpoint (such as [`CompVis/stable-diffusion-v1-4`](https://huggingface.co/CompVis/stable-diffusion-v1-4) or [`runwayml/stable-diffusion-v1-5`](https://huggingface.co/runwayml/stable-diffusion-v1-5)) may also be used for more than one task, like text-to-image or image-to-image. To differentiate what task you want to use the checkpoint for, you have to load it directly with it's corresponding task-specific pipeline class:
```python
from diffusers import StableDiffusionImg2ImgPipeline
repo_id = "runwayml/stable-diffusion-v1-5"
pipe = StableDiffusionImg2ImgPipeline.from_pretrained(repo_id)
```
### Local pipeline
To load a diffusion pipeline locally, use [`git-lfs`](https://git-lfs.github.com/) to manually download the checkpoint (in this case, [`runwayml/stable-diffusion-v1-5`](https://huggingface.co/runwayml/stable-diffusion-v1-5)) to your local disk. This creates a local folder, `./stable-diffusion-v1-5`, on your disk:
```bash
git lfs install
git clone https://huggingface.co/runwayml/stable-diffusion-v1-5
```
Then pass the local path to [`~DiffusionPipeline.from_pretrained`]:
```python
from diffusers import DiffusionPipeline
repo_id = "./stable-diffusion-v1-5"
stable_diffusion = DiffusionPipeline.from_pretrained(repo_id)
```
The [`~DiffusionPipeline.from_pretrained`] method won't download any files from the Hub when it detects a local path, but this also means it won't download and cache the latest changes to a checkpoint.
### Swap components in a pipeline
You can customize the default components of any pipeline with another compatible component. Customization is important because:
- Changing the scheduler is important for exploring the trade-off between generation speed and quality.
- Different components of a model are typically trained independently and you can swap out a component with a better-performing one.
- During finetuning, usually only some components - like the UNet or text encoder - are trained.
To find out which schedulers are compatible for customization, you can use the `compatibles` method:
```py
from diffusers import DiffusionPipeline
repo_id = "runwayml/stable-diffusion-v1-5"
stable_diffusion = DiffusionPipeline.from_pretrained(repo_id)
stable_diffusion.scheduler.compatibles
```
Let's use the [`SchedulerMixin.from_pretrained`] method to replace the default [`PNDMScheduler`] with a more performant scheduler, [`EulerDiscreteScheduler`]. The `subfolder="scheduler"` argument is required to load the scheduler configuration from the correct [subfolder](https://huggingface.co/runwayml/stable-diffusion-v1-5/tree/main/scheduler) of the pipeline repository.
Then you can pass the new [`EulerDiscreteScheduler`] instance to the `scheduler` argument in [`DiffusionPipeline`]:
```python
from diffusers import DiffusionPipeline, EulerDiscreteScheduler, DPMSolverMultistepScheduler
repo_id = "runwayml/stable-diffusion-v1-5"
scheduler = EulerDiscreteScheduler.from_pretrained(repo_id, subfolder="scheduler")
stable_diffusion = DiffusionPipeline.from_pretrained(repo_id, scheduler=scheduler)
```
### Safety checker
Diffusion models like Stable Diffusion can generate harmful content, which is why 🧨 Diffusers has a [safety checker](https://github.com/huggingface/diffusers/blob/main/src/diffusers/pipelines/stable_diffusion/safety_checker.py) to check generated outputs against known hardcoded NSFW content. If you'd like to disable the safety checker for whatever reason, pass `None` to the `safety_checker` argument:
```python
from diffusers import DiffusionPipeline
repo_id = "runwayml/stable-diffusion-v1-5"
stable_diffusion = DiffusionPipeline.from_pretrained(repo_id, safety_checker=None)
```
### Reuse components across pipelines
You can also reuse the same components in multiple pipelines to avoid loading the weights into RAM twice. Use the [`~DiffusionPipeline.components`] method to save the components:
```python
from diffusers import StableDiffusionPipeline, StableDiffusionImg2ImgPipeline
model_id = "runwayml/stable-diffusion-v1-5"
stable_diffusion_txt2img = StableDiffusionPipeline.from_pretrained(model_id)
components = stable_diffusion_txt2img.components
```
Then you can pass the `components` to another pipeline without reloading the weights into RAM:
```py
stable_diffusion_img2img = StableDiffusionImg2ImgPipeline(**components)
```
You can also pass the components individually to the pipeline if you want more flexibility over which components to reuse or disable. For example, to reuse the same components in the text-to-image pipeline, except for the safety checker and feature extractor, in the image-to-image pipeline:
```py
from diffusers import StableDiffusionPipeline, StableDiffusionImg2ImgPipeline
model_id = "runwayml/stable-diffusion-v1-5"
stable_diffusion_txt2img = StableDiffusionPipeline.from_pretrained(model_id)
stable_diffusion_img2img = StableDiffusionImg2ImgPipeline(
vae=stable_diffusion_txt2img.vae,
text_encoder=stable_diffusion_txt2img.text_encoder,
tokenizer=stable_diffusion_txt2img.tokenizer,
unet=stable_diffusion_txt2img.unet,
scheduler=stable_diffusion_txt2img.scheduler,
safety_checker=None,
feature_extractor=None,
requires_safety_checker=False,
)
```
## Checkpoint variants
A checkpoint variant is usually a checkpoint where it's weights are:
- Stored in a different floating point type for lower precision and lower storage, such as [`torch.float16`](https://pytorch.org/docs/stable/tensors.html#data-types), because it only requires half the bandwidth and storage to download. You can't use this variant if you're continuing training or using a CPU.
- Non-exponential mean averaged (EMA) weights which shouldn't be used for inference. You should use these to continue finetuning a model.
<Tip>
💡 When the checkpoints have identical model structures, but they were trained on different datasets and with a different training setup, they should be stored in separate repositories instead of variations (for example, [`stable-diffusion-v1-4`] and [`stable-diffusion-v1-5`]).
</Tip>
Otherwise, a variant is **identical** to the original checkpoint. They have exactly the same serialization format (like [Safetensors](./using_safetensors)), model structure, and weights have identical tensor shapes.
| **checkpoint type** | **weight name** | **argument for loading weights** |
|---------------------|-------------------------------------|----------------------------------|
| original | diffusion_pytorch_model.bin | |
| floating point | diffusion_pytorch_model.fp16.bin | `variant`, `torch_dtype` |
| non-EMA | diffusion_pytorch_model.non_ema.bin | `variant` |
There are two important arguments to know for loading variants:
- `torch_dtype` defines the floating point precision of the loaded checkpoints. For example, if you want to save bandwidth by loading a `fp16` variant, you should specify `torch_dtype=torch.float16` to *convert the weights* to `fp16`. Otherwise, the `fp16` weights are converted to the default `fp32` precision. You can also load the original checkpoint without defining the `variant` argument, and convert it to `fp16` with `torch_dtype=torch.float16`. In this case, the default `fp32` weights are downloaded first, and then they're converted to `fp16` after loading.
- `variant` defines which files should be loaded from the repository. For example, if you want to load a `non_ema` variant from the [`diffusers/stable-diffusion-variants`](https://huggingface.co/diffusers/stable-diffusion-variants/tree/main/unet) repository, you should specify `variant="non_ema"` to download the `non_ema` files.
```python
from diffusers import DiffusionPipeline
import torch
# load fp16 variant
stable_diffusion = DiffusionPipeline.from_pretrained(
"runwayml/stable-diffusion-v1-5", variant="fp16", torch_dtype=torch.float16
)
# load non_ema variant
stable_diffusion = DiffusionPipeline.from_pretrained("runwayml/stable-diffusion-v1-5", variant="non_ema")
```
To save a checkpoint stored in a different floating point type or as a non-EMA variant, use the [`DiffusionPipeline.save_pretrained`] method and specify the `variant` argument. You should try and save a variant to the same folder as the original checkpoint, so you can load both from the same folder:
```python
from diffusers import DiffusionPipeline
# save as fp16 variant
stable_diffusion.save_pretrained("runwayml/stable-diffusion-v1-5", variant="fp16")
# save as non-ema variant
stable_diffusion.save_pretrained("runwayml/stable-diffusion-v1-5", variant="non_ema")
```
If you don't save the variant to an existing folder, you must specify the `variant` argument otherwise it'll throw an `Exception` because it can't find the original checkpoint:
```python
# 👎 this won't work
stable_diffusion = DiffusionPipeline.from_pretrained("./stable-diffusion-v1-5", torch_dtype=torch.float16)
# 👍 this works
stable_diffusion = DiffusionPipeline.from_pretrained(
"./stable-diffusion-v1-5", variant="fp16", torch_dtype=torch.float16
)
```
<!--
TODO(Patrick) - Make sure to uncomment this part as soon as things are deprecated.
#### Using `revision` to load pipeline variants is deprecated
Previously the `revision` argument of [`DiffusionPipeline.from_pretrained`] was heavily used to
load model variants, e.g.:
```python
from diffusers import DiffusionPipeline
pipe = DiffusionPipeline.from_pretrained("CompVis/stable-diffusion-v1-4", revision="fp16")
```
However, this behavior is now deprecated since the "revision" argument should (just as it's done in GitHub) better be used to load model checkpoints from a specific commit or branch in development.
The above example is therefore deprecated and won't be supported anymore for `diffusers >= 1.0.0`.
<Tip warning={true}>
If you load diffusers pipelines or models with `revision="fp16"` or `revision="non_ema"`,
please make sure to update to code and use `variant="fp16"` or `variation="non_ema"` respectively
instead.
</Tip>
-->
## Models
Models are loaded from the [`ModelMixin.from_pretrained`] method, which downloads and caches the latest version of the model weights and configurations. If the latest files are available in the local cache, [`~ModelMixin.from_pretrained`] reuses files in the cache instead of redownloading them.
Models can be loaded from a subfolder with the `subfolder` argument. For example, the model weights for `runwayml/stable-diffusion-v1-5` are stored in the [`unet`](https://huggingface.co/runwayml/stable-diffusion-v1-5/tree/main/unet) subfolder:
```python
from diffusers import UNet2DConditionModel
repo_id = "runwayml/stable-diffusion-v1-5"
model = UNet2DConditionModel.from_pretrained(repo_id, subfolder="unet")
```
Or directly from a repository's [directory](https://huggingface.co/google/ddpm-cifar10-32/tree/main):
```python
from diffusers import UNet2DModel
repo_id = "google/ddpm-cifar10-32"
model = UNet2DModel.from_pretrained(repo_id)
```
You can also load and save model variants by specifying the `variant` argument in [`ModelMixin.from_pretrained`] and [`ModelMixin.save_pretrained`]:
```python
from diffusers import UNet2DConditionModel
model = UNet2DConditionModel.from_pretrained("runwayml/stable-diffusion-v1-5", subfolder="unet", variant="non-ema")
model.save_pretrained("./local-unet", variant="non-ema")
```
## Schedulers
Schedulers are loaded from the [`SchedulerMixin.from_pretrained`] method, and unlike models, schedulers are **not parameterized** or **trained**; they are defined by a configuration file.
Loading schedulers does not consume any significant amount of memory and the same configuration file can be used for a variety of different schedulers.
For example, the following schedulers are compatible with [`StableDiffusionPipeline`] which means you can load the same scheduler configuration file in any of these classes:
```python
from diffusers import StableDiffusionPipeline
from diffusers import (
DDPMScheduler,
DDIMScheduler,
PNDMScheduler,
LMSDiscreteScheduler,
EulerDiscreteScheduler,
EulerAncestralDiscreteScheduler,
DPMSolverMultistepScheduler,
)
repo_id = "runwayml/stable-diffusion-v1-5"
ddpm = DDPMScheduler.from_pretrained(repo_id, subfolder="scheduler")
ddim = DDIMScheduler.from_pretrained(repo_id, subfolder="scheduler")
pndm = PNDMScheduler.from_pretrained(repo_id, subfolder="scheduler")
lms = LMSDiscreteScheduler.from_pretrained(repo_id, subfolder="scheduler")
euler_anc = EulerAncestralDiscreteScheduler.from_pretrained(repo_id, subfolder="scheduler")
euler = EulerDiscreteScheduler.from_pretrained(repo_id, subfolder="scheduler")
dpm = DPMSolverMultistepScheduler.from_pretrained(repo_id, subfolder="scheduler")
# replace `dpm` with any of `ddpm`, `ddim`, `pndm`, `lms`, `euler_anc`, `euler`
pipeline = StableDiffusionPipeline.from_pretrained(repo_id, scheduler=dpm)
```
## DiffusionPipeline explained
As a class method, [`DiffusionPipeline.from_pretrained`] is responsible for two things:
- Download the latest version of the folder structure required for inference and cache it. If the latest folder structure is available in the local cache, [`DiffusionPipeline.from_pretrained`] reuses the cache and won't redownload the files.
- Load the cached weights into the correct pipeline [class](./api/pipelines/overview#diffusers-summary) - retrieved from the `model_index.json` file - and return an instance of it.
The pipelines underlying folder structure corresponds directly with their class instances. For example, the [`StableDiffusionPipeline`] corresponds to the folder structure in [`runwayml/stable-diffusion-v1-5`](https://huggingface.co/runwayml/stable-diffusion-v1-5).
```python
from diffusers import DiffusionPipeline
repo_id = "runwayml/stable-diffusion-v1-5"
pipeline = DiffusionPipeline.from_pretrained(repo_id)
print(pipeline)
```
You'll see pipeline is an instance of [`StableDiffusionPipeline`], which consists of seven components:
- `"feature_extractor"`: a [`~transformers.CLIPFeatureExtractor`] from 🤗 Transformers.
- `"safety_checker"`: a [component](https://github.com/huggingface/diffusers/blob/e55687e1e15407f60f32242027b7bb8170e58266/src/diffusers/pipelines/stable_diffusion/safety_checker.py#L32) for screening against harmful content.
- `"scheduler"`: an instance of [`PNDMScheduler`].
- `"text_encoder"`: a [`~transformers.CLIPTextModel`] from 🤗 Transformers.
- `"tokenizer"`: a [`~transformers.CLIPTokenizer`] from 🤗 Transformers.
- `"unet"`: an instance of [`UNet2DConditionModel`].
- `"vae"` an instance of [`AutoencoderKL`].
```json
StableDiffusionPipeline {
"feature_extractor": [
"transformers",
"CLIPImageProcessor"
],
"safety_checker": [
"stable_diffusion",
"StableDiffusionSafetyChecker"
],
"scheduler": [
"diffusers",
"PNDMScheduler"
],
"text_encoder": [
"transformers",
"CLIPTextModel"
],
"tokenizer": [
"transformers",
"CLIPTokenizer"
],
"unet": [
"diffusers",
"UNet2DConditionModel"
],
"vae": [
"diffusers",
"AutoencoderKL"
]
}
```
Compare the components of the pipeline instance to the [`runwayml/stable-diffusion-v1-5`](https://huggingface.co/runwayml/stable-diffusion-v1-5) folder structure, and you'll see there is a separate folder for each of the components in the repository:
```
.
├── feature_extractor
│ └── preprocessor_config.json
├── model_index.json
├── safety_checker
│ ├── config.json
│ └── pytorch_model.bin
├── scheduler
│ └── scheduler_config.json
├── text_encoder
│ ├── config.json
│ └── pytorch_model.bin
├── tokenizer
│ ├── merges.txt
│ ├── special_tokens_map.json
│ ├── tokenizer_config.json
│ └── vocab.json
├── unet
│ ├── config.json
│ ├── diffusion_pytorch_model.bin
└── vae
├── config.json
├── diffusion_pytorch_model.bin
```
You can access each of the components of the pipeline as an attribute to view its configuration:
```py
pipeline.tokenizer
CLIPTokenizer(
name_or_path="/root/.cache/huggingface/hub/models--runwayml--stable-diffusion-v1-5/snapshots/39593d5650112b4cc580433f6b0435385882d819/tokenizer",
vocab_size=49408,
model_max_length=77,
is_fast=False,
padding_side="right",
truncation_side="right",
special_tokens={
"bos_token": AddedToken("<|startoftext|>", rstrip=False, lstrip=False, single_word=False, normalized=True),
"eos_token": AddedToken("<|endoftext|>", rstrip=False, lstrip=False, single_word=False, normalized=True),
"unk_token": AddedToken("<|endoftext|>", rstrip=False, lstrip=False, single_word=False, normalized=True),
"pad_token": "<|endoftext|>",
},
)
```
Every pipeline expects a `model_index.json` file that tells the [`DiffusionPipeline`]:
- which pipeline class to load from `_class_name`
- which version of 🧨 Diffusers was used to create the model in `_diffusers_version`
- what components from which library are stored in the subfolders (`name` corresponds to the component and subfolder name, `library` corresponds to the name of the library to load the class from, and `class` corresponds to the class name)
```json
{
"_class_name": "StableDiffusionPipeline",
"_diffusers_version": "0.6.0",
"feature_extractor": [
"transformers",
"CLIPImageProcessor"
],
"safety_checker": [
"stable_diffusion",
"StableDiffusionSafetyChecker"
],
"scheduler": [
"diffusers",
"PNDMScheduler"
],
"text_encoder": [
"transformers",
"CLIPTextModel"
],
"tokenizer": [
"transformers",
"CLIPTokenizer"
],
"unet": [
"diffusers",
"UNet2DConditionModel"
],
"vae": [
"diffusers",
"AutoencoderKL"
]
}
``` | 0 |
hf_public_repos/diffusers/docs/source/en | hf_public_repos/diffusers/docs/source/en/using-diffusers/img2img.md | <!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# Text-guided image-to-image generation
[[open-in-colab]]
The [`StableDiffusionImg2ImgPipeline`] lets you pass a text prompt and an initial image to condition the generation of new images.
Before you begin, make sure you have all the necessary libraries installed:
```py
# uncomment to install the necessary libraries in Colab
#!pip install diffusers transformers ftfy accelerate
```
Get started by creating a [`StableDiffusionImg2ImgPipeline`] with a pretrained Stable Diffusion model like [`nitrosocke/Ghibli-Diffusion`](https://huggingface.co/nitrosocke/Ghibli-Diffusion).
```python
import torch
import requests
from PIL import Image
from io import BytesIO
from diffusers import StableDiffusionImg2ImgPipeline
device = "cuda"
pipe = StableDiffusionImg2ImgPipeline.from_pretrained("nitrosocke/Ghibli-Diffusion", torch_dtype=torch.float16).to(
device
)
```
Download and preprocess an initial image so you can pass it to the pipeline:
```python
url = "https://raw.githubusercontent.com/CompVis/stable-diffusion/main/assets/stable-samples/img2img/sketch-mountains-input.jpg"
response = requests.get(url)
init_image = Image.open(BytesIO(response.content)).convert("RGB")
init_image.thumbnail((768, 768))
init_image
```
<div class="flex justify-center">
<img src="https://huggingface.co/datasets/YiYiXu/test-doc-assets/resolve/main/image_2_image_using_diffusers_cell_8_output_0.jpeg"/>
</div>
<Tip>
💡 `strength` is a value between 0.0 and 1.0 that controls the amount of noise added to the input image. Values that approach 1.0 allow for lots of variations but will also produce images that are not semantically consistent with the input.
</Tip>
Define the prompt (for this checkpoint finetuned on Ghibli-style art, you need to prefix the prompt with the `ghibli style` tokens) and run the pipeline:
```python
prompt = "ghibli style, a fantasy landscape with castles"
generator = torch.Generator(device=device).manual_seed(1024)
image = pipe(prompt=prompt, image=init_image, strength=0.75, guidance_scale=7.5, generator=generator).images[0]
image
```
<div class="flex justify-center">
<img src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/ghibli-castles.png"/>
</div>
You can also try experimenting with a different scheduler to see how that affects the output:
```python
from diffusers import LMSDiscreteScheduler
lms = LMSDiscreteScheduler.from_config(pipe.scheduler.config)
pipe.scheduler = lms
generator = torch.Generator(device=device).manual_seed(1024)
image = pipe(prompt=prompt, image=init_image, strength=0.75, guidance_scale=7.5, generator=generator).images[0]
image
```
<div class="flex justify-center">
<img src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/lms-ghibli.png"/>
</div>
Check out the Spaces below, and try generating images with different values for `strength`. You'll notice that using lower values for `strength` produces images that are more similar to the original image.
Feel free to also switch the scheduler to the [`LMSDiscreteScheduler`] and see how that affects the output.
<iframe
src="https://stevhliu-ghibli-img2img.hf.space"
frameborder="0"
width="850"
height="500"
></iframe>
| 0 |
hf_public_repos/diffusers/docs/source/en | hf_public_repos/diffusers/docs/source/en/using-diffusers/weighted_prompts.md | <!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# Weighting prompts
[[open-in-colab]]
Text-guided diffusion models generate images based on a given text prompt. The text prompt
can include multiple concepts that the model should generate and it's often desirable to weight
certain parts of the prompt more or less.
Diffusion models work by conditioning the cross attention layers of the diffusion model with contextualized text embeddings (see the [Stable Diffusion Guide for more information](../stable-diffusion)).
Thus a simple way to emphasize (or de-emphasize) certain parts of the prompt is by increasing or reducing the scale of the text embedding vector that corresponds to the relevant part of the prompt.
This is called "prompt-weighting" and has been a highly demanded feature by the community (see issue [here](https://github.com/huggingface/diffusers/issues/2431)).
## How to do prompt-weighting in Diffusers
We believe the role of `diffusers` is to be a toolbox that provides essential features that enable other projects, such as [InvokeAI](https://github.com/invoke-ai/InvokeAI) or [diffuzers](https://github.com/abhishekkrthakur/diffuzers), to build powerful UIs. In order to support arbitrary methods to manipulate prompts, `diffusers` exposes a [`prompt_embeds`](https://huggingface.co/docs/diffusers/v0.14.0/en/api/pipelines/stable_diffusion/text2img#diffusers.StableDiffusionPipeline.__call__.prompt_embeds) function argument to many pipelines such as [`StableDiffusionPipeline`], allowing to directly pass the "prompt-weighted"/scaled text embeddings to the pipeline.
The [compel library](https://github.com/damian0815/compel) provides an easy way to emphasize or de-emphasize portions of the prompt for you. We strongly recommend it instead of preparing the embeddings yourself.
Let's look at a simple example. Imagine you want to generate an image of `"a red cat playing with a ball"` as
follows:
```py
from diffusers import StableDiffusionPipeline, UniPCMultistepScheduler
pipe = StableDiffusionPipeline.from_pretrained("CompVis/stable-diffusion-v1-4")
pipe.scheduler = UniPCMultistepScheduler.from_config(pipe.scheduler.config)
prompt = "a red cat playing with a ball"
generator = torch.Generator(device="cpu").manual_seed(33)
image = pipe(prompt, generator=generator, num_inference_steps=20).images[0]
image
```
This gives you:

As you can see, there is no "ball" in the image. Let's emphasize this part!
For this we should install the `compel` library:
```
pip install compel
```
and then create a `Compel` object:
```py
from compel import Compel
compel_proc = Compel(tokenizer=pipe.tokenizer, text_encoder=pipe.text_encoder)
```
Now we emphasize the part "ball" with the `"++"` syntax:
```py
prompt = "a red cat playing with a ball++"
```
and instead of passing this to the pipeline directly, we have to process it using `compel_proc`:
```py
prompt_embeds = compel_proc(prompt)
```
Now we can pass `prompt_embeds` directly to the pipeline:
```py
generator = torch.Generator(device="cpu").manual_seed(33)
images = pipe(prompt_embeds=prompt_embeds, generator=generator, num_inference_steps=20).images[0]
image
```
We now get the following image which has a "ball"!

Similarly, we de-emphasize parts of the sentence by using the `--` suffix for words, feel free to give it
a try!
If your favorite pipeline does not have a `prompt_embeds` input, please make sure to open an issue, the
diffusers team tries to be as responsive as possible.
Compel 1.1.6 adds a utility class to simplify using textual inversions. Instantiate a `DiffusersTextualInversionManager` and pass it to Compel init:
```
textual_inversion_manager = DiffusersTextualInversionManager(pipe)
compel = Compel(
tokenizer=pipe.tokenizer,
text_encoder=pipe.text_encoder,
textual_inversion_manager=textual_inversion_manager)
```
Also, please check out the documentation of the [compel](https://github.com/damian0815/compel) library for
more information.
| 0 |
hf_public_repos/diffusers/docs/source/en | hf_public_repos/diffusers/docs/source/en/using-diffusers/other-formats.md | <!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# Load different Stable Diffusion formats
[[open-in-colab]]
Stable Diffusion models are available in different formats depending on the framework they're trained and saved with, and where you download them from. Converting these formats for use in 🤗 Diffusers allows you to use all the features supported by the library, such as [using different schedulers](schedulers) for inference, [building your custom pipeline](write_own_pipeline), and a variety of techniques and methods for [optimizing inference speed](./optimization/opt_overview).
<Tip>
We highly recommend using the `.safetensors` format because it is more secure than traditional pickled files which are vulnerable and can be exploited to execute any code on your machine (learn more in the [Load safetensors](using_safetensors) guide).
</Tip>
This guide will show you how to convert other Stable Diffusion formats to be compatible with 🤗 Diffusers.
## PyTorch .ckpt
The checkpoint - or `.ckpt` - format is commonly used to store and save models. The `.ckpt` file contains the entire model and is typically several GBs in size. While you can load and use a `.ckpt` file directly with the [`~StableDiffusionPipeline.from_single_file`] method, it is generally better to convert the `.ckpt` file to 🤗 Diffusers so both formats are available.
There are two options for converting a `.ckpt` file; use a Space to convert the checkpoint or convert the `.ckpt` file with a script.
### Convert with a Space
The easiest and most convenient way to convert a `.ckpt` file is to use the [SD to Diffusers](https://huggingface.co/spaces/diffusers/sd-to-diffusers) Space. You can follow the instructions on the Space to convert the `.ckpt` file.
This approach works well for basic models, but it may struggle with more customized models. You'll know the Space failed if it returns an empty pull request or error. In this case, you can try converting the `.ckpt` file with a script.
### Convert with a script
🤗 Diffusers provides a [conversion script](https://github.com/huggingface/diffusers/blob/main/scripts/convert_original_stable_diffusion_to_diffusers.py) for converting `.ckpt` files. This approach is more reliable than the Space above.
Before you start, make sure you have a local clone of 🤗 Diffusers to run the script and log in to your Hugging Face account so you can open pull requests and push your converted model to the Hub.
```bash
huggingface-cli login
```
To use the script:
1. Git clone the repository containing the `.ckpt` file you want to convert. For this example, let's convert this [TemporalNet](https://huggingface.co/CiaraRowles/TemporalNet) `.ckpt` file:
```bash
git lfs install
git clone https://huggingface.co/CiaraRowles/TemporalNet
```
2. Open a pull request on the repository where you're converting the checkpoint from:
```bash
cd TemporalNet && git fetch origin refs/pr/13:pr/13
git checkout pr/13
```
3. There are several input arguments to configure in the conversion script, but the most important ones are:
- `checkpoint_path`: the path to the `.ckpt` file to convert.
- `original_config_file`: a YAML file defining the configuration of the original architecture. If you can't find this file, try searching for the YAML file in the GitHub repository where you found the `.ckpt` file.
- `dump_path`: the path to the converted model.
For example, you can take the `cldm_v15.yaml` file from the [ControlNet](https://github.com/lllyasviel/ControlNet/tree/main/models) repository because the TemporalNet model is a Stable Diffusion v1.5 and ControlNet model.
4. Now you can run the script to convert the `.ckpt` file:
```bash
python ../diffusers/scripts/convert_original_stable_diffusion_to_diffusers.py --checkpoint_path temporalnetv3.ckpt --original_config_file cldm_v15.yaml --dump_path ./ --controlnet
```
5. Once the conversion is done, upload your converted model and test out the resulting [pull request](https://huggingface.co/CiaraRowles/TemporalNet/discussions/13)!
```bash
git push origin pr/13:refs/pr/13
```
## Keras .pb or .h5
<Tip warning={true}>
🧪 This is an experimental feature. Only Stable Diffusion v1 checkpoints are supported by the Convert KerasCV Space at the moment.
</Tip>
[KerasCV](https://keras.io/keras_cv/) supports training for [Stable Diffusion](https://github.com/keras-team/keras-cv/blob/master/keras_cv/models/stable_diffusion) v1 and v2. However, it offers limited support for experimenting with Stable Diffusion models for inference and deployment whereas 🤗 Diffusers has a more complete set of features for this purpose, such as different [noise schedulers](https://huggingface.co/docs/diffusers/using-diffusers/schedulers), [flash attention](https://huggingface.co/docs/diffusers/optimization/xformers), and [other
optimization techniques](https://huggingface.co/docs/diffusers/optimization/fp16).
The [Convert KerasCV](https://huggingface.co/spaces/sayakpaul/convert-kerascv-sd-diffusers) Space converts `.pb` or `.h5` files to PyTorch, and then wraps them in a [`StableDiffusionPipeline`] so it is ready for inference. The converted checkpoint is stored in a repository on the Hugging Face Hub.
For this example, let's convert the [`sayakpaul/textual-inversion-kerasio`](https://huggingface.co/sayakpaul/textual-inversion-kerasio/tree/main) checkpoint which was trained with Textual Inversion. It uses the special token `<my-funny-cat>` to personalize images with cats.
The Convert KerasCV Space allows you to input the following:
* Your Hugging Face token.
* Paths to download the UNet and text encoder weights from. Depending on how the model was trained, you don't necessarily need to provide the paths to both the UNet and text encoder. For example, Textual Inversion only requires the embeddings from the text encoder and a text-to-image model only requires the UNet weights.
* Placeholder token is only applicable for textual inversion models.
* The `output_repo_prefix` is the name of the repository where the converted model is stored.
Click the **Submit** button to automatically convert the KerasCV checkpoint! Once the checkpoint is successfully converted, you'll see a link to the new repository containing the converted checkpoint. Follow the link to the new repository, and you'll see the Convert KerasCV Space generated a model card with an inference widget to try out the converted model.
If you prefer to run inference with code, click on the **Use in Diffusers** button in the upper right corner of the model card to copy and paste the code snippet:
```py
from diffusers import DiffusionPipeline
pipeline = DiffusionPipeline.from_pretrained("sayakpaul/textual-inversion-cat-kerascv_sd_diffusers_pipeline")
```
Then you can generate an image like:
```py
from diffusers import DiffusionPipeline
pipeline = DiffusionPipeline.from_pretrained("sayakpaul/textual-inversion-cat-kerascv_sd_diffusers_pipeline")
pipeline.to("cuda")
placeholder_token = "<my-funny-cat-token>"
prompt = f"two {placeholder_token} getting married, photorealistic, high quality"
image = pipeline(prompt, num_inference_steps=50).images[0]
```
## A1111 LoRA files
[Automatic1111](https://github.com/AUTOMATIC1111/stable-diffusion-webui) (A1111) is a popular web UI for Stable Diffusion that supports model sharing platforms like [Civitai](https://civitai.com/). Models trained with the Low-Rank Adaptation (LoRA) technique are especially popular because they're fast to train and have a much smaller file size than a fully finetuned model. 🤗 Diffusers supports loading A1111 LoRA checkpoints with [`~loaders.LoraLoaderMixin.load_lora_weights`]:
```py
from diffusers import DiffusionPipeline, UniPCMultistepScheduler
import torch
pipeline = DiffusionPipeline.from_pretrained(
"andite/anything-v4.0", torch_dtype=torch.float16, safety_checker=None
).to("cuda")
pipeline.scheduler = UniPCMultistepScheduler.from_config(pipeline.scheduler.config)
```
Download a LoRA checkpoint from Civitai; this example uses the [Howls Moving Castle,Interior/Scenery LoRA (Ghibli Stlye)](https://civitai.com/models/14605?modelVersionId=19998) checkpoint, but feel free to try out any LoRA checkpoint!
```py
# uncomment to download the safetensor weights
#!wget https://civitai.com/api/download/models/19998 -O howls_moving_castle.safetensors
```
Load the LoRA checkpoint into the pipeline with the [`~loaders.LoraLoaderMixin.load_lora_weights`] method:
```py
pipeline.load_lora_weights(".", weight_name="howls_moving_castle.safetensors")
```
Now you can use the pipeline to generate images:
```py
prompt = "masterpiece, illustration, ultra-detailed, cityscape, san francisco, golden gate bridge, california, bay area, in the snow, beautiful detailed starry sky"
negative_prompt = "lowres, cropped, worst quality, low quality, normal quality, artifacts, signature, watermark, username, blurry, more than one bridge, bad architecture"
images = pipeline(
prompt=prompt,
negative_prompt=negative_prompt,
width=512,
height=512,
num_inference_steps=25,
num_images_per_prompt=4,
generator=torch.manual_seed(0),
).images
```
Finally, create a helper function to display the images:
```py
from PIL import Image
def image_grid(imgs, rows=2, cols=2):
w, h = imgs[0].size
grid = Image.new("RGB", size=(cols * w, rows * h))
for i, img in enumerate(imgs):
grid.paste(img, box=(i % cols * w, i // cols * h))
return grid
image_grid(images)
```
<div class="flex justify-center">
<img src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/a1111-lora-sf.png"/>
</div>
| 0 |
hf_public_repos/diffusers/docs/source/en | hf_public_repos/diffusers/docs/source/en/using-diffusers/contribute_pipeline.md | <!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# How to contribute a community pipeline
<Tip>
💡 Take a look at GitHub Issue [#841](https://github.com/huggingface/diffusers/issues/841) for more context about why we're adding community pipelines to help everyone easily share their work without being slowed down.
</Tip>
Community pipelines allow you to add any additional features you'd like on top of the [`DiffusionPipeline`]. The main benefit of building on top of the `DiffusionPipeline` is anyone can load and use your pipeline by only adding one more argument, making it super easy for the community to access.
This guide will show you how to create a community pipeline and explain how they work. To keep things simple, you'll create a "one-step" pipeline where the `UNet` does a single forward pass and calls the scheduler once.
## Initialize the pipeline
You should start by creating a `one_step_unet.py` file for your community pipeline. In this file, create a pipeline class that inherits from the [`DiffusionPipeline`] to be able to load model weights and the scheduler configuration from the Hub. The one-step pipeline needs a `UNet` and a scheduler, so you'll need to add these as arguments to the `__init__` function:
```python
from diffusers import DiffusionPipeline
import torch
class UnetSchedulerOneForwardPipeline(DiffusionPipeline):
def __init__(self, unet, scheduler):
super().__init__()
```
To ensure your pipeline and its components (`unet` and `scheduler`) can be saved with [`~DiffusionPipeline.save_pretrained`], add them to the `register_modules` function:
```diff
from diffusers import DiffusionPipeline
import torch
class UnetSchedulerOneForwardPipeline(DiffusionPipeline):
def __init__(self, unet, scheduler):
super().__init__()
+ self.register_modules(unet=unet, scheduler=scheduler)
```
Cool, the `__init__` step is done and you can move to the forward pass now! 🔥
## Define the forward pass
In the forward pass, which we recommend defining as `__call__`, you have complete creative freedom to add whatever feature you'd like. For our amazing one-step pipeline, create a random image and only call the `unet` and `scheduler` once by setting `timestep=1`:
```diff
from diffusers import DiffusionPipeline
import torch
class UnetSchedulerOneForwardPipeline(DiffusionPipeline):
def __init__(self, unet, scheduler):
super().__init__()
self.register_modules(unet=unet, scheduler=scheduler)
+ def __call__(self):
+ image = torch.randn(
+ (1, self.unet.config.in_channels, self.unet.config.sample_size, self.unet.config.sample_size),
+ )
+ timestep = 1
+ model_output = self.unet(image, timestep).sample
+ scheduler_output = self.scheduler.step(model_output, timestep, image).prev_sample
+ return scheduler_output
```
That's it! 🚀 You can now run this pipeline by passing a `unet` and `scheduler` to it:
```python
from diffusers import DDPMScheduler, UNet2DModel
scheduler = DDPMScheduler()
unet = UNet2DModel()
pipeline = UnetSchedulerOneForwardPipeline(unet=unet, scheduler=scheduler)
output = pipeline()
```
But what's even better is you can load pre-existing weights into the pipeline if the pipeline structure is identical. For example, you can load the [`google/ddpm-cifar10-32`](https://huggingface.co/google/ddpm-cifar10-32) weights into the one-step pipeline:
```python
pipeline = UnetSchedulerOneForwardPipeline.from_pretrained("google/ddpm-cifar10-32")
output = pipeline()
```
## Share your pipeline
Open a Pull Request on the 🧨 Diffusers [repository](https://github.com/huggingface/diffusers) to add your awesome pipeline in `one_step_unet.py` to the [examples/community](https://github.com/huggingface/diffusers/tree/main/examples/community) subfolder.
Once it is merged, anyone with `diffusers >= 0.4.0` installed can use this pipeline magically 🪄 by specifying it in the `custom_pipeline` argument:
```python
from diffusers import DiffusionPipeline
pipe = DiffusionPipeline.from_pretrained("google/ddpm-cifar10-32", custom_pipeline="one_step_unet")
pipe()
```
Another way to share your community pipeline is to upload the `one_step_unet.py` file directly to your preferred [model repository](https://huggingface.co/docs/hub/models-uploading) on the Hub. Instead of specifying the `one_step_unet.py` file, pass the model repository id to the `custom_pipeline` argument:
```python
from diffusers import DiffusionPipeline
pipeline = DiffusionPipeline.from_pretrained("google/ddpm-cifar10-32", custom_pipeline="stevhliu/one_step_unet")
```
Take a look at the following table to compare the two sharing workflows to help you decide the best option for you:
| | GitHub community pipeline | HF Hub community pipeline |
|----------------|------------------------------------------------------------------------------------------------------------------|-------------------------------------------------------------------------------------------|
| usage | same | same |
| review process | open a Pull Request on GitHub and undergo a review process from the Diffusers team before merging; may be slower | upload directly to a Hub repository without any review; this is the fastest workflow |
| visibility | included in the official Diffusers repository and documentation | included on your HF Hub profile and relies on your own usage/promotion to gain visibility |
<Tip>
💡 You can use whatever package you want in your community pipeline file - as long as the user has it installed, everything will work fine. Make sure you have one and only one pipeline class that inherits from `DiffusionPipeline` because this is automatically detected.
</Tip>
## How do community pipelines work?
A community pipeline is a class that inherits from [`DiffusionPipeline`] which means:
- It can be loaded with the [`custom_pipeline`] argument.
- The model weights and scheduler configuration are loaded from [`pretrained_model_name_or_path`].
- The code that implements a feature in the community pipeline is defined in a `pipeline.py` file.
Sometimes you can't load all the pipeline components weights from an official repository. In this case, the other components should be passed directly to the pipeline:
```python
from diffusers import DiffusionPipeline
from transformers import CLIPFeatureExtractor, CLIPModel
model_id = "CompVis/stable-diffusion-v1-4"
clip_model_id = "laion/CLIP-ViT-B-32-laion2B-s34B-b79K"
feature_extractor = CLIPFeatureExtractor.from_pretrained(clip_model_id)
clip_model = CLIPModel.from_pretrained(clip_model_id, torch_dtype=torch.float16)
pipeline = DiffusionPipeline.from_pretrained(
model_id,
custom_pipeline="clip_guided_stable_diffusion",
clip_model=clip_model,
feature_extractor=feature_extractor,
scheduler=scheduler,
torch_dtype=torch.float16,
)
```
The magic behind community pipelines is contained in the following code. It allows the community pipeline to be loaded from GitHub or the Hub, and it'll be available to all 🧨 Diffusers packages.
```python
# 2. Load the pipeline class, if using custom module then load it from the hub
# if we load from explicit class, let's use it
if custom_pipeline is not None:
pipeline_class = get_class_from_dynamic_module(
custom_pipeline, module_file=CUSTOM_PIPELINE_FILE_NAME, cache_dir=custom_pipeline
)
elif cls != DiffusionPipeline:
pipeline_class = cls
else:
diffusers_module = importlib.import_module(cls.__module__.split(".")[0])
pipeline_class = getattr(diffusers_module, config_dict["_class_name"])
```
| 0 |
hf_public_repos/diffusers/docs/source/en | hf_public_repos/diffusers/docs/source/en/using-diffusers/other-modalities.md | <!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# Using Diffusers with other modalities
Diffusers is in the process of expanding to modalities other than images.
Example type | Colab | Pipeline |
:-------------------------:|:-------------------------:|:-------------------------:|
[Molecule conformation](https://www.nature.com/subjects/molecular-conformation#:~:text=Definition,to%20changes%20in%20their%20environment.) generation | [](https://colab.research.google.com/github/huggingface/notebooks/blob/main/diffusers/geodiff_molecule_conformation.ipynb) | ❌
More coming soon! | 0 |
hf_public_repos/diffusers/docs/source/en | hf_public_repos/diffusers/docs/source/en/using-diffusers/stable_diffusion_jax_how_to.md | # 🧨 Stable Diffusion in JAX / Flax !
[[open-in-colab]]
🤗 Hugging Face [Diffusers](https://github.com/huggingface/diffusers) supports Flax since version `0.5.1`! This allows for super fast inference on Google TPUs, such as those available in Colab, Kaggle or Google Cloud Platform.
This notebook shows how to run inference using JAX / Flax. If you want more details about how Stable Diffusion works or want to run it in GPU, please refer to [this notebook](https://huggingface.co/docs/diffusers/stable_diffusion).
First, make sure you are using a TPU backend. If you are running this notebook in Colab, select `Runtime` in the menu above, then select the option "Change runtime type" and then select `TPU` under the `Hardware accelerator` setting.
Note that JAX is not exclusive to TPUs, but it shines on that hardware because each TPU server has 8 TPU accelerators working in parallel.
## Setup
First make sure diffusers is installed.
```py
# uncomment to install the necessary libraries in Colab
#!pip install jax==0.3.25 jaxlib==0.3.25 flax transformers ftfy
#!pip install diffusers
```
```python
import jax.tools.colab_tpu
jax.tools.colab_tpu.setup_tpu()
import jax
```
```python
num_devices = jax.device_count()
device_type = jax.devices()[0].device_kind
print(f"Found {num_devices} JAX devices of type {device_type}.")
assert (
"TPU" in device_type
), "Available device is not a TPU, please select TPU from Edit > Notebook settings > Hardware accelerator"
```
```python out
Found 8 JAX devices of type Cloud TPU.
```
Then we import all the dependencies.
```python
import numpy as np
import jax
import jax.numpy as jnp
from pathlib import Path
from jax import pmap
from flax.jax_utils import replicate
from flax.training.common_utils import shard
from PIL import Image
from huggingface_hub import notebook_login
from diffusers import FlaxStableDiffusionPipeline
```
## Model Loading
TPU devices support `bfloat16`, an efficient half-float type. We'll use it for our tests, but you can also use `float32` to use full precision instead.
```python
dtype = jnp.bfloat16
```
Flax is a functional framework, so models are stateless and parameters are stored outside them. Loading the pre-trained Flax pipeline will return both the pipeline itself and the model weights (or parameters). We are using a `bf16` version of the weights, which leads to type warnings that you can safely ignore.
```python
pipeline, params = FlaxStableDiffusionPipeline.from_pretrained(
"CompVis/stable-diffusion-v1-4",
revision="bf16",
dtype=dtype,
)
```
## Inference
Since TPUs usually have 8 devices working in parallel, we'll replicate our prompt as many times as devices we have. Then we'll perform inference on the 8 devices at once, each responsible for generating one image. Thus, we'll get 8 images in the same amount of time it takes for one chip to generate a single one.
After replicating the prompt, we obtain the tokenized text ids by invoking the `prepare_inputs` function of the pipeline. The length of the tokenized text is set to 77 tokens, as required by the configuration of the underlying CLIP Text model.
```python
prompt = "A cinematic film still of Morgan Freeman starring as Jimi Hendrix, portrait, 40mm lens, shallow depth of field, close up, split lighting, cinematic"
prompt = [prompt] * jax.device_count()
prompt_ids = pipeline.prepare_inputs(prompt)
prompt_ids.shape
```
```python out
(8, 77)
```
### Replication and parallelization
Model parameters and inputs have to be replicated across the 8 parallel devices we have. The parameters dictionary is replicated using `flax.jax_utils.replicate`, which traverses the dictionary and changes the shape of the weights so they are repeated 8 times. Arrays are replicated using `shard`.
```python
p_params = replicate(params)
```
```python
prompt_ids = shard(prompt_ids)
prompt_ids.shape
```
```python out
(8, 1, 77)
```
That shape means that each one of the `8` devices will receive as an input a `jnp` array with shape `(1, 77)`. `1` is therefore the batch size per device. In TPUs with sufficient memory, it could be larger than `1` if we wanted to generate multiple images (per chip) at once.
We are almost ready to generate images! We just need to create a random number generator to pass to the generation function. This is the standard procedure in Flax, which is very serious and opinionated about random numbers – all functions that deal with random numbers are expected to receive a generator. This ensures reproducibility, even when we are training across multiple distributed devices.
The helper function below uses a seed to initialize a random number generator. As long as we use the same seed, we'll get the exact same results. Feel free to use different seeds when exploring results later in the notebook.
```python
def create_key(seed=0):
return jax.random.PRNGKey(seed)
```
We obtain a rng and then "split" it 8 times so each device receives a different generator. Therefore, each device will create a different image, and the full process is reproducible.
```python
rng = create_key(0)
rng = jax.random.split(rng, jax.device_count())
```
JAX code can be compiled to an efficient representation that runs very fast. However, we need to ensure that all inputs have the same shape in subsequent calls; otherwise, JAX will have to recompile the code, and we wouldn't be able to take advantage of the optimized speed.
The Flax pipeline can compile the code for us if we pass `jit = True` as an argument. It will also ensure that the model runs in parallel in the 8 available devices.
The first time we run the following cell it will take a long time to compile, but subequent calls (even with different inputs) will be much faster. For example, it took more than a minute to compile in a TPU v2-8 when I tested, but then it takes about **`7s`** for future inference runs.
```
%%time
images = pipeline(prompt_ids, p_params, rng, jit=True)[0]
```
```python out
CPU times: user 56.2 s, sys: 42.5 s, total: 1min 38s
Wall time: 1min 29s
```
The returned array has shape `(8, 1, 512, 512, 3)`. We reshape it to get rid of the second dimension and obtain 8 images of `512 × 512 × 3` and then convert them to PIL.
```python
images = images.reshape((images.shape[0] * images.shape[1],) + images.shape[-3:])
images = pipeline.numpy_to_pil(images)
```
### Visualization
Let's create a helper function to display images in a grid.
```python
def image_grid(imgs, rows, cols):
w, h = imgs[0].size
grid = Image.new("RGB", size=(cols * w, rows * h))
for i, img in enumerate(imgs):
grid.paste(img, box=(i % cols * w, i // cols * h))
return grid
```
```python
image_grid(images, 2, 4)
```
## Using different prompts
We don't have to replicate the _same_ prompt in all the devices. We can do whatever we want: generate 2 prompts 4 times each, or even generate 8 different prompts at once. Let's do that!
First, we'll refactor the input preparation code into a handy function:
```python
prompts = [
"Labrador in the style of Hokusai",
"Painting of a squirrel skating in New York",
"HAL-9000 in the style of Van Gogh",
"Times Square under water, with fish and a dolphin swimming around",
"Ancient Roman fresco showing a man working on his laptop",
"Close-up photograph of young black woman against urban background, high quality, bokeh",
"Armchair in the shape of an avocado",
"Clown astronaut in space, with Earth in the background",
]
```
```python
prompt_ids = pipeline.prepare_inputs(prompts)
prompt_ids = shard(prompt_ids)
images = pipeline(prompt_ids, p_params, rng, jit=True).images
images = images.reshape((images.shape[0] * images.shape[1],) + images.shape[-3:])
images = pipeline.numpy_to_pil(images)
image_grid(images, 2, 4)
```

## How does parallelization work?
We said before that the `diffusers` Flax pipeline automatically compiles the model and runs it in parallel on all available devices. We'll now briefly look inside that process to show how it works.
JAX parallelization can be done in multiple ways. The easiest one revolves around using the `jax.pmap` function to achieve single-program, multiple-data (SPMD) parallelization. It means we'll run several copies of the same code, each on different data inputs. More sophisticated approaches are possible, we invite you to go over the [JAX documentation](https://jax.readthedocs.io/en/latest/index.html) and the [`pjit` pages](https://jax.readthedocs.io/en/latest/jax-101/08-pjit.html?highlight=pjit) to explore this topic if you are interested!
`jax.pmap` does two things for us:
- Compiles (or `jit`s) the code, as if we had invoked `jax.jit()`. This does not happen when we call `pmap`, but the first time the pmapped function is invoked.
- Ensures the compiled code runs in parallel in all the available devices.
To show how it works we `pmap` the `_generate` method of the pipeline, which is the private method that runs generates images. Please, note that this method may be renamed or removed in future releases of `diffusers`.
```python
p_generate = pmap(pipeline._generate)
```
After we use `pmap`, the prepared function `p_generate` will conceptually do the following:
* Invoke a copy of the underlying function `pipeline._generate` in each device.
* Send each device a different portion of the input arguments. That's what sharding is used for. In our case, `prompt_ids` has shape `(8, 1, 77, 768)`. This array will be split in `8` and each copy of `_generate` will receive an input with shape `(1, 77, 768)`.
We can code `_generate` completely ignoring the fact that it will be invoked in parallel. We just care about our batch size (`1` in this example) and the dimensions that make sense for our code, and don't have to change anything to make it work in parallel.
The same way as when we used the pipeline call, the first time we run the following cell it will take a while, but then it will be much faster.
```
%%time
images = p_generate(prompt_ids, p_params, rng)
images = images.block_until_ready()
images.shape
```
```python out
CPU times: user 1min 15s, sys: 18.2 s, total: 1min 34s
Wall time: 1min 15s
```
```python
images.shape
```
```python out
(8, 1, 512, 512, 3)
```
We use `block_until_ready()` to correctly measure inference time, because JAX uses asynchronous dispatch and returns control to the Python loop as soon as it can. You don't need to use that in your code; blocking will occur automatically when you want to use the result of a computation that has not yet been materialized. | 0 |
hf_public_repos/diffusers/docs/source/en | hf_public_repos/diffusers/docs/source/en/using-diffusers/reproducibility.md | <!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# Create reproducible pipelines
[[open-in-colab]]
Reproducibility is important for testing, replicating results, and can even be used to [improve image quality](reusing_seeds). However, the randomness in diffusion models is a desired property because it allows the pipeline to generate different images every time it is run. While you can't expect to get the exact same results across platforms, you can expect results to be reproducible across releases and platforms within a certain tolerance range. Even then, tolerance varies depending on the diffusion pipeline and checkpoint.
This is why it's important to understand how to control sources of randomness in diffusion models or use deterministic algorithms.
<Tip>
💡 We strongly recommend reading PyTorch's [statement about reproducibility](https://pytorch.org/docs/stable/notes/randomness.html):
> Completely reproducible results are not guaranteed across PyTorch releases, individual commits, or different platforms. Furthermore, results may not be reproducible between CPU and GPU executions, even when using identical seeds.
</Tip>
## Control randomness
During inference, pipelines rely heavily on random sampling operations which include creating the
Gaussian noise tensors to denoise and adding noise to the scheduling step.
Take a look at the tensor values in the [`DDIMPipeline`] after two inference steps:
```python
from diffusers import DDIMPipeline
import numpy as np
model_id = "google/ddpm-cifar10-32"
# load model and scheduler
ddim = DDIMPipeline.from_pretrained(model_id)
# run pipeline for just two steps and return numpy tensor
image = ddim(num_inference_steps=2, output_type="np").images
print(np.abs(image).sum())
```
Running the code above prints one value, but if you run it again you get a different value. What is going on here?
Every time the pipeline is run, [`torch.randn`](https://pytorch.org/docs/stable/generated/torch.randn.html) uses a different random seed to create Gaussian noise which is denoised stepwise. This leads to a different result each time it is run, which is great for diffusion pipelines since it generates a different random image each time.
But if you need to reliably generate the same image, that'll depend on whether you're running the pipeline on a CPU or GPU.
### CPU
To generate reproducible results on a CPU, you'll need to use a PyTorch [`Generator`](https://pytorch.org/docs/stable/generated/torch.randn.html) and set a seed:
```python
import torch
from diffusers import DDIMPipeline
import numpy as np
model_id = "google/ddpm-cifar10-32"
# load model and scheduler
ddim = DDIMPipeline.from_pretrained(model_id)
# create a generator for reproducibility
generator = torch.Generator(device="cpu").manual_seed(0)
# run pipeline for just two steps and return numpy tensor
image = ddim(num_inference_steps=2, output_type="np", generator=generator).images
print(np.abs(image).sum())
```
Now when you run the code above, it always prints a value of `1491.1711` no matter what because the `Generator` object with the seed is passed to all the random functions of the pipeline.
If you run this code example on your specific hardware and PyTorch version, you should get a similar, if not the same, result.
<Tip>
💡 It might be a bit unintuitive at first to pass `Generator` objects to the pipeline instead of
just integer values representing the seed, but this is the recommended design when dealing with
probabilistic models in PyTorch as `Generator`'s are *random states* that can be
passed to multiple pipelines in a sequence.
</Tip>
### GPU
Writing a reproducible pipeline on a GPU is a bit trickier, and full reproducibility across different hardware is not guaranteed because matrix multiplication - which diffusion pipelines require a lot of - is less deterministic on a GPU than a CPU. For example, if you run the same code example above on a GPU:
```python
import torch
from diffusers import DDIMPipeline
import numpy as np
model_id = "google/ddpm-cifar10-32"
# load model and scheduler
ddim = DDIMPipeline.from_pretrained(model_id)
ddim.to("cuda")
# create a generator for reproducibility
generator = torch.Generator(device="cuda").manual_seed(0)
# run pipeline for just two steps and return numpy tensor
image = ddim(num_inference_steps=2, output_type="np", generator=generator).images
print(np.abs(image).sum())
```
The result is not the same even though you're using an identical seed because the GPU uses a different random number generator than the CPU.
To circumvent this problem, 🧨 Diffusers has a [`~diffusers.utils.randn_tensor`] function for creating random noise on the CPU, and then moving the tensor to a GPU if necessary. The `randn_tensor` function is used everywhere inside the pipeline, allowing the user to **always** pass a CPU `Generator` even if the pipeline is run on a GPU.
You'll see the results are much closer now!
```python
import torch
from diffusers import DDIMPipeline
import numpy as np
model_id = "google/ddpm-cifar10-32"
# load model and scheduler
ddim = DDIMPipeline.from_pretrained(model_id)
ddim.to("cuda")
# create a generator for reproducibility; notice you don't place it on the GPU!
generator = torch.manual_seed(0)
# run pipeline for just two steps and return numpy tensor
image = ddim(num_inference_steps=2, output_type="np", generator=generator).images
print(np.abs(image).sum())
```
<Tip>
💡 If reproducibility is important, we recommend always passing a CPU generator.
The performance loss is often neglectable, and you'll generate much more similar
values than if the pipeline had been run on a GPU.
</Tip>
Finally, for more complex pipelines such as [`UnCLIPPipeline`], these are often extremely
susceptible to precision error propagation. Don't expect similar results across
different GPU hardware or PyTorch versions. In this case, you'll need to run
exactly the same hardware and PyTorch version for full reproducibility.
## Deterministic algorithms
You can also configure PyTorch to use deterministic algorithms to create a reproducible pipeline. However, you should be aware that deterministic algorithms may be slower than nondeterministic ones and you may observe a decrease in performance. But if reproducibility is important to you, then this is the way to go!
Nondeterministic behavior occurs when operations are launched in more than one CUDA stream. To avoid this, set the environment varibale [`CUBLAS_WORKSPACE_CONFIG`](https://docs.nvidia.com/cuda/cublas/index.html#results-reproducibility) to `:16:8` to only use one buffer size during runtime.
PyTorch typically benchmarks multiple algorithms to select the fastest one, but if you want reproducibility, you should disable this feature because the benchmark may select different algorithms each time. Lastly, pass `True` to [`torch.use_deterministic_algorithms`](https://pytorch.org/docs/stable/generated/torch.use_deterministic_algorithms.html) to enable deterministic algorithms.
```py
import os
os.environ["CUBLAS_WORKSPACE_CONFIG"] = ":16:8"
torch.backends.cudnn.benchmark = False
torch.use_deterministic_algorithms(True)
```
Now when you run the same pipeline twice, you'll get identical results.
```py
import torch
from diffusers import DDIMScheduler, StableDiffusionPipeline
import numpy as np
model_id = "runwayml/stable-diffusion-v1-5"
pipe = StableDiffusionPipeline.from_pretrained(model_id).to("cuda")
pipe.scheduler = DDIMScheduler.from_config(pipe.scheduler.config)
g = torch.Generator(device="cuda")
prompt = "A bear is playing a guitar on Times Square"
g.manual_seed(0)
result1 = pipe(prompt=prompt, num_inference_steps=50, generator=g, output_type="latent").images
g.manual_seed(0)
result2 = pipe(prompt=prompt, num_inference_steps=50, generator=g, output_type="latent").images
print("L_inf dist = ", abs(result1 - result2).max())
"L_inf dist = tensor(0., device='cuda:0')"
``` | 0 |
hf_public_repos/diffusers/docs/source/en | hf_public_repos/diffusers/docs/source/en/using-diffusers/inpaint.md | <!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# Text-guided image-inpainting
[[open-in-colab]]
The [`StableDiffusionInpaintPipeline`] allows you to edit specific parts of an image by providing a mask and a text prompt. It uses a version of Stable Diffusion, like [`runwayml/stable-diffusion-inpainting`](https://huggingface.co/runwayml/stable-diffusion-inpainting) specifically trained for inpainting tasks.
Get started by loading an instance of the [`StableDiffusionInpaintPipeline`]:
```python
import PIL
import requests
import torch
from io import BytesIO
from diffusers import StableDiffusionInpaintPipeline
pipeline = StableDiffusionInpaintPipeline.from_pretrained(
"runwayml/stable-diffusion-inpainting",
torch_dtype=torch.float16,
)
pipeline = pipeline.to("cuda")
```
Download an image and a mask of a dog which you'll eventually replace:
```python
def download_image(url):
response = requests.get(url)
return PIL.Image.open(BytesIO(response.content)).convert("RGB")
img_url = "https://raw.githubusercontent.com/CompVis/latent-diffusion/main/data/inpainting_examples/overture-creations-5sI6fQgYIuo.png"
mask_url = "https://raw.githubusercontent.com/CompVis/latent-diffusion/main/data/inpainting_examples/overture-creations-5sI6fQgYIuo_mask.png"
init_image = download_image(img_url).resize((512, 512))
mask_image = download_image(mask_url).resize((512, 512))
```
Now you can create a prompt to replace the mask with something else:
```python
prompt = "Face of a yellow cat, high resolution, sitting on a park bench"
image = pipeline(prompt=prompt, image=init_image, mask_image=mask_image).images[0]
```
`image` | `mask_image` | `prompt` | output |
:-------------------------:|:-------------------------:|:-------------------------:|-------------------------:|
<img src="https://raw.githubusercontent.com/CompVis/latent-diffusion/main/data/inpainting_examples/overture-creations-5sI6fQgYIuo.png" alt="drawing" width="250"/> | <img src="https://raw.githubusercontent.com/CompVis/latent-diffusion/main/data/inpainting_examples/overture-creations-5sI6fQgYIuo_mask.png" alt="drawing" width="250"/> | ***Face of a yellow cat, high resolution, sitting on a park bench*** | <img src="https://huggingface.co/datasets/hf-internal-testing/diffusers-images/resolve/main/in_paint/yellow_cat_sitting_on_a_park_bench.png" alt="drawing" width="250"/> |
<Tip warning={true}>
A previous experimental implementation of inpainting used a different, lower-quality process. To ensure backwards compatibility, loading a pretrained pipeline that doesn't contain the new model will still apply the old inpainting method.
</Tip>
Check out the Spaces below to try out image inpainting yourself!
<iframe
src="https://runwayml-stable-diffusion-inpainting.hf.space"
frameborder="0"
width="850"
height="500"
></iframe>
| 0 |
hf_public_repos/diffusers/docs/source/en | hf_public_repos/diffusers/docs/source/en/using-diffusers/custom_pipeline_overview.md | <!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# Load community pipelines
[[open-in-colab]]
Community pipelines are any [`DiffusionPipeline`] class that are different from the original implementation as specified in their paper (for example, the [`StableDiffusionControlNetPipeline`] corresponds to the [Text-to-Image Generation with ControlNet Conditioning](https://arxiv.org/abs/2302.05543) paper). They provide additional functionality or extend the original implementation of a pipeline.
There are many cool community pipelines like [Speech to Image](https://github.com/huggingface/diffusers/tree/main/examples/community#speech-to-image) or [Composable Stable Diffusion](https://github.com/huggingface/diffusers/tree/main/examples/community#composable-stable-diffusion), and you can find all the official community pipelines [here](https://github.com/huggingface/diffusers/tree/main/examples/community).
To load any community pipeline on the Hub, pass the repository id of the community pipeline to the `custom_pipeline` argument and the model repository where you'd like to load the pipeline weights and components from. For example, the example below loads a dummy pipeline from [`hf-internal-testing/diffusers-dummy-pipeline`](https://huggingface.co/hf-internal-testing/diffusers-dummy-pipeline/blob/main/pipeline.py) and the pipeline weights and components from [`google/ddpm-cifar10-32`](https://huggingface.co/google/ddpm-cifar10-32):
<Tip warning={true}>
🔒 By loading a community pipeline from the Hugging Face Hub, you are trusting that the code you are loading is safe. Make sure to inspect the code online before loading and running it automatically!
</Tip>
```py
from diffusers import DiffusionPipeline
pipeline = DiffusionPipeline.from_pretrained(
"google/ddpm-cifar10-32", custom_pipeline="hf-internal-testing/diffusers-dummy-pipeline"
)
```
Loading an official community pipeline is similar, but you can mix loading weights from an official repository id and pass pipeline components directly. The example below loads the community [CLIP Guided Stable Diffusion](https://github.com/huggingface/diffusers/tree/main/examples/community#clip-guided-stable-diffusion) pipeline, and you can pass the CLIP model components directly to it:
```py
from diffusers import DiffusionPipeline
from transformers import CLIPImageProcessor, CLIPModel
clip_model_id = "laion/CLIP-ViT-B-32-laion2B-s34B-b79K"
feature_extractor = CLIPImageProcessor.from_pretrained(clip_model_id)
clip_model = CLIPModel.from_pretrained(clip_model_id)
pipeline = DiffusionPipeline.from_pretrained(
"runwayml/stable-diffusion-v1-5",
custom_pipeline="clip_guided_stable_diffusion",
clip_model=clip_model,
feature_extractor=feature_extractor,
)
```
For more information about community pipelines, take a look at the [Community pipelines](custom_pipeline_examples) guide for how to use them and if you're interested in adding a community pipeline check out the [How to contribute a community pipeline](contribute_pipeline) guide! | 0 |
hf_public_repos/diffusers/docs/source/en | hf_public_repos/diffusers/docs/source/en/conceptual/evaluation.md | <!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# Evaluating Diffusion Models
<a target="_blank" href="https://colab.research.google.com/github/huggingface/notebooks/blob/main/diffusers/evaluation.ipynb">
<img src="https://colab.research.google.com/assets/colab-badge.svg" alt="Open In Colab"/>
</a>
Evaluation of generative models like [Stable Diffusion](https://huggingface.co/docs/diffusers/stable_diffusion) is subjective in nature. But as practitioners and researchers, we often have to make careful choices amongst many different possibilities. So, when working with different generative models (like GANs, Diffusion, etc.), how do we choose one over the other?
Qualitative evaluation of such models can be error-prone and might incorrectly influence a decision.
However, quantitative metrics don't necessarily correspond to image quality. So, usually, a combination
of both qualitative and quantitative evaluations provides a stronger signal when choosing one model
over the other.
In this document, we provide a non-exhaustive overview of qualitative and quantitative methods to evaluate Diffusion models. For quantitative methods, we specifically focus on how to implement them alongside `diffusers`.
The methods shown in this document can also be used to evaluate different [noise schedulers](https://huggingface.co/docs/diffusers/main/en/api/schedulers/overview) keeping the underlying generation model fixed.
## Scenarios
We cover Diffusion models with the following pipelines:
- Text-guided image generation (such as the [`StableDiffusionPipeline`](https://huggingface.co/docs/diffusers/main/en/api/pipelines/stable_diffusion/text2img)).
- Text-guided image generation, additionally conditioned on an input image (such as the [`StableDiffusionImg2ImgPipeline`](https://huggingface.co/docs/diffusers/main/en/api/pipelines/stable_diffusion/img2img), and [`StableDiffusionInstructPix2PixPipeline`](https://huggingface.co/docs/diffusers/main/en/api/pipelines/stable_diffusion/pix2pix)).
- Class-conditioned image generation models (such as the [`DiTPipeline`](https://huggingface.co/docs/diffusers/main/en/api/pipelines/dit)).
## Qualitative Evaluation
Qualitative evaluation typically involves human assessment of generated images. Quality is measured across aspects such as compositionality, image-text alignment, and spatial relations. Common prompts provide a degree of uniformity for subjective metrics.
DrawBench and PartiPrompts are prompt datasets used for qualitative benchmarking. DrawBench and PartiPrompts were introduced by [Imagen](https://imagen.research.google/) and [Parti](https://parti.research.google/) respectively.
From the [official Parti website](https://parti.research.google/):
> PartiPrompts (P2) is a rich set of over 1600 prompts in English that we release as part of this work. P2 can be used to measure model capabilities across various categories and challenge aspects.
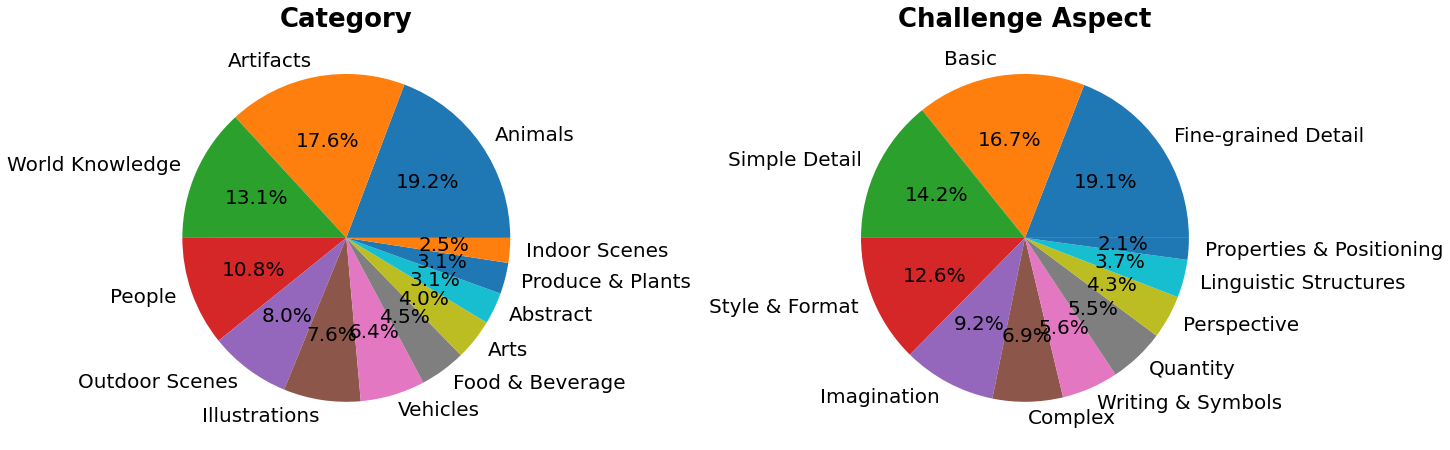
PartiPrompts has the following columns:
- Prompt
- Category of the prompt (such as “Abstract”, “World Knowledge”, etc.)
- Challenge reflecting the difficulty (such as “Basic”, “Complex”, “Writing & Symbols”, etc.)
These benchmarks allow for side-by-side human evaluation of different image generation models.
For this, the 🧨 Diffusers team has built **Open Parti Prompts**, which is a community-driven qualitative benchmark based on Parti Prompts to compare state-of-the-art open-source diffusion models:
- [Open Parti Prompts Game](https://huggingface.co/spaces/OpenGenAI/open-parti-prompts): For 10 parti prompts, 4 generated images are shown and the user selects the image that suits the prompt best.
- [Open Parti Prompts Leaderboard](https://huggingface.co/spaces/OpenGenAI/parti-prompts-leaderboard): The leaderboard comparing the currently best open-sourced diffusion models to each other.
To manually compare images, let’s see how we can use `diffusers` on a couple of PartiPrompts.
Below we show some prompts sampled across different challenges: Basic, Complex, Linguistic Structures, Imagination, and Writing & Symbols. Here we are using PartiPrompts as a [dataset](https://huggingface.co/datasets/nateraw/parti-prompts).
```python
from datasets import load_dataset
# prompts = load_dataset("nateraw/parti-prompts", split="train")
# prompts = prompts.shuffle()
# sample_prompts = [prompts[i]["Prompt"] for i in range(5)]
# Fixing these sample prompts in the interest of reproducibility.
sample_prompts = [
"a corgi",
"a hot air balloon with a yin-yang symbol, with the moon visible in the daytime sky",
"a car with no windows",
"a cube made of porcupine",
'The saying "BE EXCELLENT TO EACH OTHER" written on a red brick wall with a graffiti image of a green alien wearing a tuxedo. A yellow fire hydrant is on a sidewalk in the foreground.',
]
```
Now we can use these prompts to generate some images using Stable Diffusion ([v1-4 checkpoint](https://huggingface.co/CompVis/stable-diffusion-v1-4)):
```python
import torch
seed = 0
generator = torch.manual_seed(seed)
images = sd_pipeline(sample_prompts, num_images_per_prompt=1, generator=generator, output_type="numpy").images
```

We can also set `num_images_per_prompt` accordingly to compare different images for the same prompt. Running the same pipeline but with a different checkpoint ([v1-5](https://huggingface.co/runwayml/stable-diffusion-v1-5)), yields:

Once several images are generated from all the prompts using multiple models (under evaluation), these results are presented to human evaluators for scoring. For
more details on the DrawBench and PartiPrompts benchmarks, refer to their respective papers.
<Tip>
It is useful to look at some inference samples while a model is training to measure the
training progress. In our [training scripts](https://github.com/huggingface/diffusers/tree/main/examples/), we support this utility with additional support for
logging to TensorBoard and Weights & Biases.
</Tip>
## Quantitative Evaluation
In this section, we will walk you through how to evaluate three different diffusion pipelines using:
- CLIP score
- CLIP directional similarity
- FID
### Text-guided image generation
[CLIP score](https://arxiv.org/abs/2104.08718) measures the compatibility of image-caption pairs. Higher CLIP scores imply higher compatibility 🔼. The CLIP score is a quantitative measurement of the qualitative concept "compatibility". Image-caption pair compatibility can also be thought of as the semantic similarity between the image and the caption. CLIP score was found to have high correlation with human judgement.
Let's first load a [`StableDiffusionPipeline`]:
```python
from diffusers import StableDiffusionPipeline
import torch
model_ckpt = "CompVis/stable-diffusion-v1-4"
sd_pipeline = StableDiffusionPipeline.from_pretrained(model_ckpt, torch_dtype=torch.float16).to("cuda")
```
Generate some images with multiple prompts:
```python
prompts = [
"a photo of an astronaut riding a horse on mars",
"A high tech solarpunk utopia in the Amazon rainforest",
"A pikachu fine dining with a view to the Eiffel Tower",
"A mecha robot in a favela in expressionist style",
"an insect robot preparing a delicious meal",
"A small cabin on top of a snowy mountain in the style of Disney, artstation",
]
images = sd_pipeline(prompts, num_images_per_prompt=1, output_type="numpy").images
print(images.shape)
# (6, 512, 512, 3)
```
And then, we calculate the CLIP score.
```python
from torchmetrics.functional.multimodal import clip_score
from functools import partial
clip_score_fn = partial(clip_score, model_name_or_path="openai/clip-vit-base-patch16")
def calculate_clip_score(images, prompts):
images_int = (images * 255).astype("uint8")
clip_score = clip_score_fn(torch.from_numpy(images_int).permute(0, 3, 1, 2), prompts).detach()
return round(float(clip_score), 4)
sd_clip_score = calculate_clip_score(images, prompts)
print(f"CLIP score: {sd_clip_score}")
# CLIP score: 35.7038
```
In the above example, we generated one image per prompt. If we generated multiple images per prompt, we would have to take the average score from the generated images per prompt.
Now, if we wanted to compare two checkpoints compatible with the [`StableDiffusionPipeline`] we should pass a generator while calling the pipeline. First, we generate images with a
fixed seed with the [v1-4 Stable Diffusion checkpoint](https://huggingface.co/CompVis/stable-diffusion-v1-4):
```python
seed = 0
generator = torch.manual_seed(seed)
images = sd_pipeline(prompts, num_images_per_prompt=1, generator=generator, output_type="numpy").images
```
Then we load the [v1-5 checkpoint](https://huggingface.co/runwayml/stable-diffusion-v1-5) to generate images:
```python
model_ckpt_1_5 = "runwayml/stable-diffusion-v1-5"
sd_pipeline_1_5 = StableDiffusionPipeline.from_pretrained(model_ckpt_1_5, torch_dtype=weight_dtype).to(device)
images_1_5 = sd_pipeline_1_5(prompts, num_images_per_prompt=1, generator=generator, output_type="numpy").images
```
And finally, we compare their CLIP scores:
```python
sd_clip_score_1_4 = calculate_clip_score(images, prompts)
print(f"CLIP Score with v-1-4: {sd_clip_score_1_4}")
# CLIP Score with v-1-4: 34.9102
sd_clip_score_1_5 = calculate_clip_score(images_1_5, prompts)
print(f"CLIP Score with v-1-5: {sd_clip_score_1_5}")
# CLIP Score with v-1-5: 36.2137
```
It seems like the [v1-5](https://huggingface.co/runwayml/stable-diffusion-v1-5) checkpoint performs better than its predecessor. Note, however, that the number of prompts we used to compute the CLIP scores is quite low. For a more practical evaluation, this number should be way higher, and the prompts should be diverse.
<Tip warning={true}>
By construction, there are some limitations in this score. The captions in the training dataset
were crawled from the web and extracted from `alt` and similar tags associated an image on the internet.
They are not necessarily representative of what a human being would use to describe an image. Hence we
had to "engineer" some prompts here.
</Tip>
### Image-conditioned text-to-image generation
In this case, we condition the generation pipeline with an input image as well as a text prompt. Let's take the [`StableDiffusionInstructPix2PixPipeline`], as an example. It takes an edit instruction as an input prompt and an input image to be edited.
Here is one example:
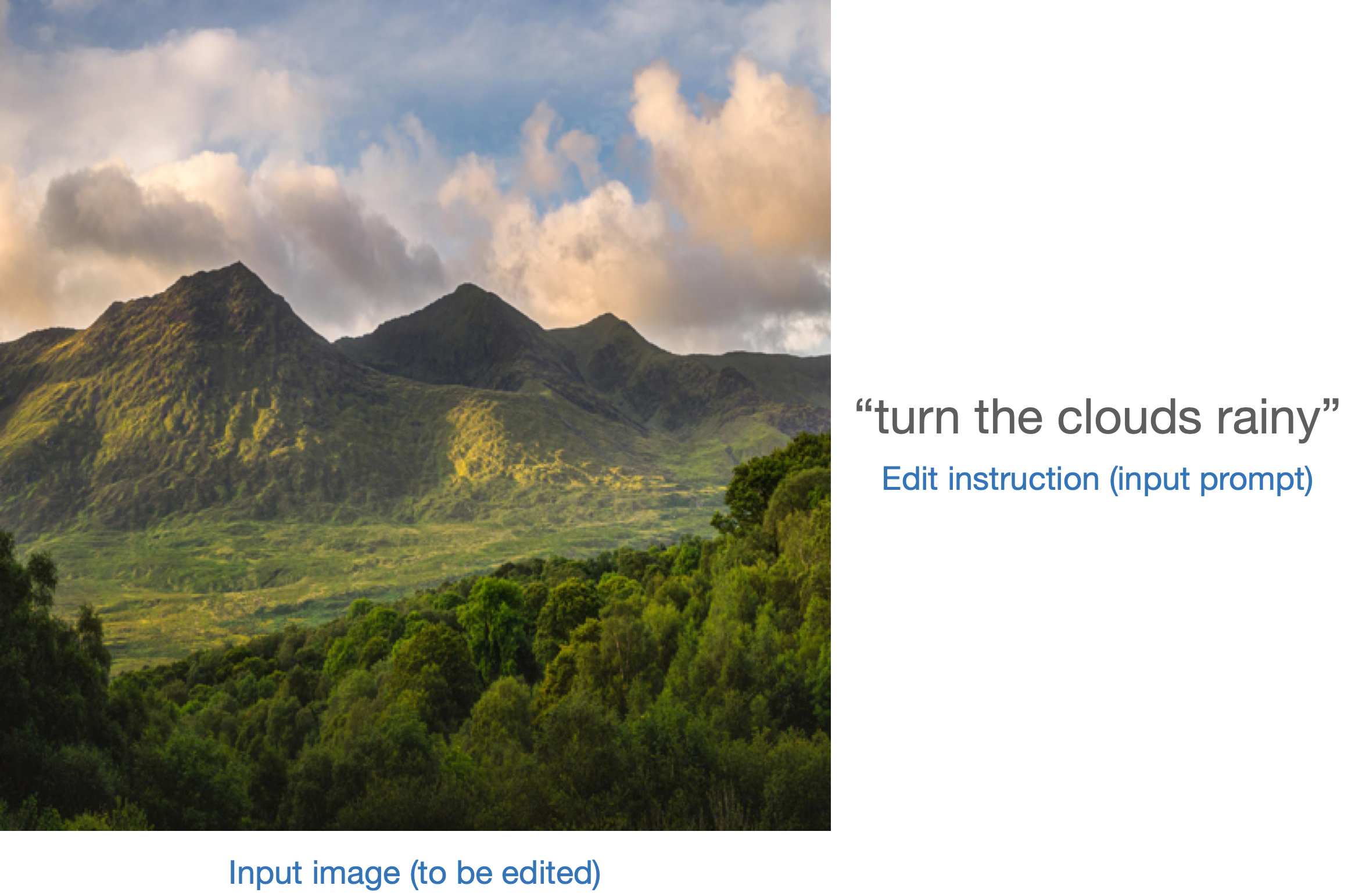
One strategy to evaluate such a model is to measure the consistency of the change between the two images (in [CLIP](https://huggingface.co/docs/transformers/model_doc/clip) space) with the change between the two image captions (as shown in [CLIP-Guided Domain Adaptation of Image Generators](https://arxiv.org/abs/2108.00946)). This is referred to as the "**CLIP directional similarity**".
- Caption 1 corresponds to the input image (image 1) that is to be edited.
- Caption 2 corresponds to the edited image (image 2). It should reflect the edit instruction.
Following is a pictorial overview:
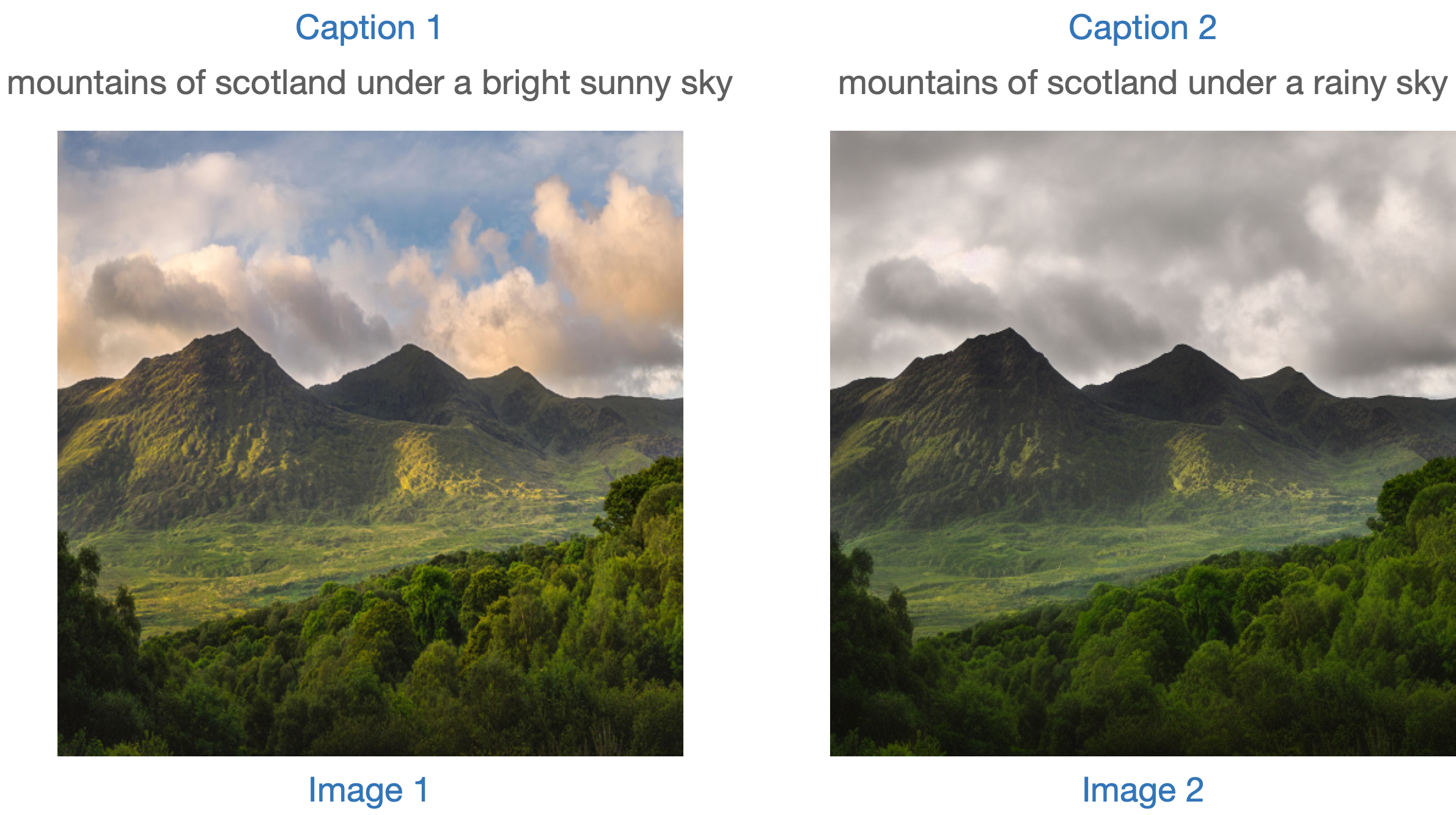
We have prepared a mini dataset to implement this metric. Let's first load the dataset.
```python
from datasets import load_dataset
dataset = load_dataset("sayakpaul/instructpix2pix-demo", split="train")
dataset.features
```
```bash
{'input': Value(dtype='string', id=None),
'edit': Value(dtype='string', id=None),
'output': Value(dtype='string', id=None),
'image': Image(decode=True, id=None)}
```
Here we have:
- `input` is a caption corresponding to the `image`.
- `edit` denotes the edit instruction.
- `output` denotes the modified caption reflecting the `edit` instruction.
Let's take a look at a sample.
```python
idx = 0
print(f"Original caption: {dataset[idx]['input']}")
print(f"Edit instruction: {dataset[idx]['edit']}")
print(f"Modified caption: {dataset[idx]['output']}")
```
```bash
Original caption: 2. FAROE ISLANDS: An archipelago of 18 mountainous isles in the North Atlantic Ocean between Norway and Iceland, the Faroe Islands has 'everything you could hope for', according to Big 7 Travel. It boasts 'crystal clear waterfalls, rocky cliffs that seem to jut out of nowhere and velvety green hills'
Edit instruction: make the isles all white marble
Modified caption: 2. WHITE MARBLE ISLANDS: An archipelago of 18 mountainous white marble isles in the North Atlantic Ocean between Norway and Iceland, the White Marble Islands has 'everything you could hope for', according to Big 7 Travel. It boasts 'crystal clear waterfalls, rocky cliffs that seem to jut out of nowhere and velvety green hills'
```
And here is the image:
```python
dataset[idx]["image"]
```

We will first edit the images of our dataset with the edit instruction and compute the directional similarity.
Let's first load the [`StableDiffusionInstructPix2PixPipeline`]:
```python
from diffusers import StableDiffusionInstructPix2PixPipeline
instruct_pix2pix_pipeline = StableDiffusionInstructPix2PixPipeline.from_pretrained(
"timbrooks/instruct-pix2pix", torch_dtype=torch.float16
).to(device)
```
Now, we perform the edits:
```python
import numpy as np
def edit_image(input_image, instruction):
image = instruct_pix2pix_pipeline(
instruction,
image=input_image,
output_type="numpy",
generator=generator,
).images[0]
return image
input_images = []
original_captions = []
modified_captions = []
edited_images = []
for idx in range(len(dataset)):
input_image = dataset[idx]["image"]
edit_instruction = dataset[idx]["edit"]
edited_image = edit_image(input_image, edit_instruction)
input_images.append(np.array(input_image))
original_captions.append(dataset[idx]["input"])
modified_captions.append(dataset[idx]["output"])
edited_images.append(edited_image)
```
To measure the directional similarity, we first load CLIP's image and text encoders:
```python
from transformers import (
CLIPTokenizer,
CLIPTextModelWithProjection,
CLIPVisionModelWithProjection,
CLIPImageProcessor,
)
clip_id = "openai/clip-vit-large-patch14"
tokenizer = CLIPTokenizer.from_pretrained(clip_id)
text_encoder = CLIPTextModelWithProjection.from_pretrained(clip_id).to(device)
image_processor = CLIPImageProcessor.from_pretrained(clip_id)
image_encoder = CLIPVisionModelWithProjection.from_pretrained(clip_id).to(device)
```
Notice that we are using a particular CLIP checkpoint, i.e., `openai/clip-vit-large-patch14`. This is because the Stable Diffusion pre-training was performed with this CLIP variant. For more details, refer to the [documentation](https://huggingface.co/docs/diffusers/main/en/api/pipelines/stable_diffusion/pix2pix#diffusers.StableDiffusionInstructPix2PixPipeline.text_encoder).
Next, we prepare a PyTorch `nn.Module` to compute directional similarity:
```python
import torch.nn as nn
import torch.nn.functional as F
class DirectionalSimilarity(nn.Module):
def __init__(self, tokenizer, text_encoder, image_processor, image_encoder):
super().__init__()
self.tokenizer = tokenizer
self.text_encoder = text_encoder
self.image_processor = image_processor
self.image_encoder = image_encoder
def preprocess_image(self, image):
image = self.image_processor(image, return_tensors="pt")["pixel_values"]
return {"pixel_values": image.to(device)}
def tokenize_text(self, text):
inputs = self.tokenizer(
text,
max_length=self.tokenizer.model_max_length,
padding="max_length",
truncation=True,
return_tensors="pt",
)
return {"input_ids": inputs.input_ids.to(device)}
def encode_image(self, image):
preprocessed_image = self.preprocess_image(image)
image_features = self.image_encoder(**preprocessed_image).image_embeds
image_features = image_features / image_features.norm(dim=1, keepdim=True)
return image_features
def encode_text(self, text):
tokenized_text = self.tokenize_text(text)
text_features = self.text_encoder(**tokenized_text).text_embeds
text_features = text_features / text_features.norm(dim=1, keepdim=True)
return text_features
def compute_directional_similarity(self, img_feat_one, img_feat_two, text_feat_one, text_feat_two):
sim_direction = F.cosine_similarity(img_feat_two - img_feat_one, text_feat_two - text_feat_one)
return sim_direction
def forward(self, image_one, image_two, caption_one, caption_two):
img_feat_one = self.encode_image(image_one)
img_feat_two = self.encode_image(image_two)
text_feat_one = self.encode_text(caption_one)
text_feat_two = self.encode_text(caption_two)
directional_similarity = self.compute_directional_similarity(
img_feat_one, img_feat_two, text_feat_one, text_feat_two
)
return directional_similarity
```
Let's put `DirectionalSimilarity` to use now.
```python
dir_similarity = DirectionalSimilarity(tokenizer, text_encoder, image_processor, image_encoder)
scores = []
for i in range(len(input_images)):
original_image = input_images[i]
original_caption = original_captions[i]
edited_image = edited_images[i]
modified_caption = modified_captions[i]
similarity_score = dir_similarity(original_image, edited_image, original_caption, modified_caption)
scores.append(float(similarity_score.detach().cpu()))
print(f"CLIP directional similarity: {np.mean(scores)}")
# CLIP directional similarity: 0.0797976553440094
```
Like the CLIP Score, the higher the CLIP directional similarity, the better it is.
It should be noted that the `StableDiffusionInstructPix2PixPipeline` exposes two arguments, namely, `image_guidance_scale` and `guidance_scale` that let you control the quality of the final edited image. We encourage you to experiment with these two arguments and see the impact of that on the directional similarity.
We can extend the idea of this metric to measure how similar the original image and edited version are. To do that, we can just do `F.cosine_similarity(img_feat_two, img_feat_one)`. For these kinds of edits, we would still want the primary semantics of the images to be preserved as much as possible, i.e., a high similarity score.
We can use these metrics for similar pipelines such as the [`StableDiffusionPix2PixZeroPipeline`](https://huggingface.co/docs/diffusers/main/en/api/pipelines/stable_diffusion/pix2pix_zero#diffusers.StableDiffusionPix2PixZeroPipeline).
<Tip>
Both CLIP score and CLIP direction similarity rely on the CLIP model, which can make the evaluations biased.
</Tip>
***Extending metrics like IS, FID (discussed later), or KID can be difficult*** when the model under evaluation was pre-trained on a large image-captioning dataset (such as the [LAION-5B dataset](https://laion.ai/blog/laion-5b/)). This is because underlying these metrics is an InceptionNet (pre-trained on the ImageNet-1k dataset) used for extracting intermediate image features. The pre-training dataset of Stable Diffusion may have limited overlap with the pre-training dataset of InceptionNet, so it is not a good candidate here for feature extraction.
***Using the above metrics helps evaluate models that are class-conditioned. For example, [DiT](https://huggingface.co/docs/diffusers/main/en/api/pipelines/stable_diffusion/overview). It was pre-trained being conditioned on the ImageNet-1k classes.***
### Class-conditioned image generation
Class-conditioned generative models are usually pre-trained on a class-labeled dataset such as [ImageNet-1k](https://huggingface.co/datasets/imagenet-1k). Popular metrics for evaluating these models include Fréchet Inception Distance (FID), Kernel Inception Distance (KID), and Inception Score (IS). In this document, we focus on FID ([Heusel et al.](https://arxiv.org/abs/1706.08500)). We show how to compute it with the [`DiTPipeline`](https://huggingface.co/docs/diffusers/api/pipelines/dit), which uses the [DiT model](https://arxiv.org/abs/2212.09748) under the hood.
FID aims to measure how similar are two datasets of images. As per [this resource](https://mmgeneration.readthedocs.io/en/latest/quick_run.html#fid):
> Fréchet Inception Distance is a measure of similarity between two datasets of images. It was shown to correlate well with the human judgment of visual quality and is most often used to evaluate the quality of samples of Generative Adversarial Networks. FID is calculated by computing the Fréchet distance between two Gaussians fitted to feature representations of the Inception network.
These two datasets are essentially the dataset of real images and the dataset of fake images (generated images in our case). FID is usually calculated with two large datasets. However, for this document, we will work with two mini datasets.
Let's first download a few images from the ImageNet-1k training set:
```python
from zipfile import ZipFile
import requests
def download(url, local_filepath):
r = requests.get(url)
with open(local_filepath, "wb") as f:
f.write(r.content)
return local_filepath
dummy_dataset_url = "https://hf.co/datasets/sayakpaul/sample-datasets/resolve/main/sample-imagenet-images.zip"
local_filepath = download(dummy_dataset_url, dummy_dataset_url.split("/")[-1])
with ZipFile(local_filepath, "r") as zipper:
zipper.extractall(".")
```
```python
from PIL import Image
import os
dataset_path = "sample-imagenet-images"
image_paths = sorted([os.path.join(dataset_path, x) for x in os.listdir(dataset_path)])
real_images = [np.array(Image.open(path).convert("RGB")) for path in image_paths]
```
These are 10 images from the following Imagenet-1k classes: "cassette_player", "chain_saw" (x2), "church", "gas_pump" (x3), "parachute" (x2), and "tench".
<p align="center">
<img src="https://huggingface.co/datasets/diffusers/docs-images/resolve/main/evaluation_diffusion_models/real-images.png" alt="real-images"><br>
<em>Real images.</em>
</p>
Now that the images are loaded, let's apply some lightweight pre-processing on them to use them for FID calculation.
```python
from torchvision.transforms import functional as F
def preprocess_image(image):
image = torch.tensor(image).unsqueeze(0)
image = image.permute(0, 3, 1, 2) / 255.0
return F.center_crop(image, (256, 256))
real_images = torch.cat([preprocess_image(image) for image in real_images])
print(real_images.shape)
# torch.Size([10, 3, 256, 256])
```
We now load the [`DiTPipeline`](https://huggingface.co/docs/diffusers/api/pipelines/dit) to generate images conditioned on the above-mentioned classes.
```python
from diffusers import DiTPipeline, DPMSolverMultistepScheduler
dit_pipeline = DiTPipeline.from_pretrained("facebook/DiT-XL-2-256", torch_dtype=torch.float16)
dit_pipeline.scheduler = DPMSolverMultistepScheduler.from_config(dit_pipeline.scheduler.config)
dit_pipeline = dit_pipeline.to("cuda")
words = [
"cassette player",
"chainsaw",
"chainsaw",
"church",
"gas pump",
"gas pump",
"gas pump",
"parachute",
"parachute",
"tench",
]
class_ids = dit_pipeline.get_label_ids(words)
output = dit_pipeline(class_labels=class_ids, generator=generator, output_type="numpy")
fake_images = output.images
fake_images = torch.tensor(fake_images)
fake_images = fake_images.permute(0, 3, 1, 2)
print(fake_images.shape)
# torch.Size([10, 3, 256, 256])
```
Now, we can compute the FID using [`torchmetrics`](https://torchmetrics.readthedocs.io/).
```python
from torchmetrics.image.fid import FrechetInceptionDistance
fid = FrechetInceptionDistance(normalize=True)
fid.update(real_images, real=True)
fid.update(fake_images, real=False)
print(f"FID: {float(fid.compute())}")
# FID: 177.7147216796875
```
The lower the FID, the better it is. Several things can influence FID here:
- Number of images (both real and fake)
- Randomness induced in the diffusion process
- Number of inference steps in the diffusion process
- The scheduler being used in the diffusion process
For the last two points, it is, therefore, a good practice to run the evaluation across different seeds and inference steps, and then report an average result.
<Tip warning={true}>
FID results tend to be fragile as they depend on a lot of factors:
* The specific Inception model used during computation.
* The implementation accuracy of the computation.
* The image format (not the same if we start from PNGs vs JPGs).
Keeping that in mind, FID is often most useful when comparing similar runs, but it is
hard to reproduce paper results unless the authors carefully disclose the FID
measurement code.
These points apply to other related metrics too, such as KID and IS.
</Tip>
As a final step, let's visually inspect the `fake_images`.
<p align="center">
<img src="https://huggingface.co/datasets/diffusers/docs-images/resolve/main/evaluation_diffusion_models/fake-images.png" alt="fake-images"><br>
<em>Fake images.</em>
</p>
| 0 |
hf_public_repos/diffusers/docs/source/en | hf_public_repos/diffusers/docs/source/en/conceptual/ethical_guidelines.md | # 🧨 Diffusers’ Ethical Guidelines
## Preamble
[Diffusers](https://huggingface.co/docs/diffusers/index) provides pre-trained diffusion models and serves as a modular toolbox for inference and training.
Given its real case applications in the world and potential negative impacts on society, we think it is important to provide the project with ethical guidelines to guide the development, users’ contributions, and usage of the Diffusers library.
The risks associated with using this technology are still being examined, but to name a few: copyrights issues for artists; deep-fake exploitation; sexual content generation in inappropriate contexts; non-consensual impersonation; harmful social biases perpetuating the oppression of marginalized groups.
We will keep tracking risks and adapt the following guidelines based on the community's responsiveness and valuable feedback.
## Scope
The Diffusers community will apply the following ethical guidelines to the project’s development and help coordinate how the community will integrate the contributions, especially concerning sensitive topics related to ethical concerns.
## Ethical guidelines
The following ethical guidelines apply generally, but we will primarily implement them when dealing with ethically sensitive issues while making a technical choice. Furthermore, we commit to adapting those ethical principles over time following emerging harms related to the state of the art of the technology in question.
- **Transparency**: we are committed to being transparent in managing PRs, explaining our choices to users, and making technical decisions.
- **Consistency**: we are committed to guaranteeing our users the same level of attention in project management, keeping it technically stable and consistent.
- **Simplicity**: with a desire to make it easy to use and exploit the Diffusers library, we are committed to keeping the project’s goals lean and coherent.
- **Accessibility**: the Diffusers project helps lower the entry bar for contributors who can help run it even without technical expertise. Doing so makes research artifacts more accessible to the community.
- **Reproducibility**: we aim to be transparent about the reproducibility of upstream code, models, and datasets when made available through the Diffusers library.
- **Responsibility**: as a community and through teamwork, we hold a collective responsibility to our users by anticipating and mitigating this technology's potential risks and dangers.
## Examples of implementations: Safety features and Mechanisms
The team works daily to make the technical and non-technical tools available to deal with the potential ethical and social risks associated with diffusion technology. Moreover, the community's input is invaluable in ensuring these features' implementation and raising awareness with us.
- [**Community tab**](https://huggingface.co/docs/hub/repositories-pull-requests-discussions): it enables the community to discuss and better collaborate on a project.
- **Bias exploration and evaluation**: the Hugging Face team provides a [space](https://huggingface.co/spaces/society-ethics/DiffusionBiasExplorer) to demonstrate the biases in Stable Diffusion interactively. In this sense, we support and encourage bias explorers and evaluations.
- **Encouraging safety in deployment**
- [**Safe Stable Diffusion**](https://huggingface.co/docs/diffusers/main/en/api/pipelines/stable_diffusion_safe): It mitigates the well-known issue that models, like Stable Diffusion, that are trained on unfiltered, web-crawled datasets tend to suffer from inappropriate degeneration. Related paper: [Safe Latent Diffusion: Mitigating Inappropriate Degeneration in Diffusion Models](https://arxiv.org/abs/2211.05105).
- [**Safety Checker**](https://github.com/huggingface/diffusers/blob/main/src/diffusers/pipelines/stable_diffusion/safety_checker.py): It checks and compares the class probability of a set of hard-coded harmful concepts in the embedding space against an image after it has been generated. The harmful concepts are intentionally hidden to prevent reverse engineering of the checker.
- **Staged released on the Hub**: in particularly sensitive situations, access to some repositories should be restricted. This staged release is an intermediary step that allows the repository’s authors to have more control over its use.
- **Licensing**: [OpenRAILs](https://huggingface.co/blog/open_rail), a new type of licensing, allow us to ensure free access while having a set of restrictions that ensure more responsible use.
| 0 |
hf_public_repos/diffusers/docs/source/en | hf_public_repos/diffusers/docs/source/en/conceptual/contribution.md | <!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# How to contribute to Diffusers 🧨
We ❤️ contributions from the open-source community! Everyone is welcome, and all types of participation –not just code– are valued and appreciated. Answering questions, helping others, reaching out, and improving the documentation are all immensely valuable to the community, so don't be afraid and get involved if you're up for it!
Everyone is encouraged to start by saying 👋 in our public Discord channel. We discuss the latest trends in diffusion models, ask questions, show off personal projects, help each other with contributions, or just hang out ☕. <a href="https://Discord.gg/G7tWnz98XR"><img alt="Join us on Discord" src="https://img.shields.io/discord/823813159592001537?color=5865F2&logo=discord&logoColor=white"></a>
Whichever way you choose to contribute, we strive to be part of an open, welcoming, and kind community. Please, read our [code of conduct](https://github.com/huggingface/diffusers/blob/main/CODE_OF_CONDUCT.md) and be mindful to respect it during your interactions. We also recommend you become familiar with the [ethical guidelines](https://huggingface.co/docs/diffusers/conceptual/ethical_guidelines) that guide our project and ask you to adhere to the same principles of transparency and responsibility.
We enormously value feedback from the community, so please do not be afraid to speak up if you believe you have valuable feedback that can help improve the library - every message, comment, issue, and pull request (PR) is read and considered.
## Overview
You can contribute in many ways ranging from answering questions on issues to adding new diffusion models to
the core library.
In the following, we give an overview of different ways to contribute, ranked by difficulty in ascending order. All of them are valuable to the community.
* 1. Asking and answering questions on [the Diffusers discussion forum](https://discuss.huggingface.co/c/discussion-related-to-httpsgithubcomhuggingfacediffusers) or on [Discord](https://discord.gg/G7tWnz98XR).
* 2. Opening new issues on [the GitHub Issues tab](https://github.com/huggingface/diffusers/issues/new/choose)
* 3. Answering issues on [the GitHub Issues tab](https://github.com/huggingface/diffusers/issues)
* 4. Fix a simple issue, marked by the "Good first issue" label, see [here](https://github.com/huggingface/diffusers/issues?q=is%3Aopen+is%3Aissue+label%3A%22good+first+issue%22).
* 5. Contribute to the [documentation](https://github.com/huggingface/diffusers/tree/main/docs/source).
* 6. Contribute a [Community Pipeline](https://github.com/huggingface/diffusers/issues?q=is%3Aopen+is%3Aissue+label%3Acommunity-examples)
* 7. Contribute to the [examples](https://github.com/huggingface/diffusers/tree/main/examples).
* 8. Fix a more difficult issue, marked by the "Good second issue" label, see [here](https://github.com/huggingface/diffusers/issues?q=is%3Aopen+is%3Aissue+label%3A%22Good+second+issue%22).
* 9. Add a new pipeline, model, or scheduler, see ["New Pipeline/Model"](https://github.com/huggingface/diffusers/issues?q=is%3Aopen+is%3Aissue+label%3A%22New+pipeline%2Fmodel%22) and ["New scheduler"](https://github.com/huggingface/diffusers/issues?q=is%3Aopen+is%3Aissue+label%3A%22New+scheduler%22) issues. For this contribution, please have a look at [Design Philosophy](https://github.com/huggingface/diffusers/blob/main/PHILOSOPHY.md).
As said before, **all contributions are valuable to the community**.
In the following, we will explain each contribution a bit more in detail.
For all contributions 4.-9. you will need to open a PR. It is explained in detail how to do so in [Opening a pull requst](#how-to-open-a-pr)
### 1. Asking and answering questions on the Diffusers discussion forum or on the Diffusers Discord
Any question or comment related to the Diffusers library can be asked on the [discussion forum](https://discuss.huggingface.co/c/discussion-related-to-httpsgithubcomhuggingfacediffusers/) or on [Discord](https://discord.gg/G7tWnz98XR). Such questions and comments include (but are not limited to):
- Reports of training or inference experiments in an attempt to share knowledge
- Presentation of personal projects
- Questions to non-official training examples
- Project proposals
- General feedback
- Paper summaries
- Asking for help on personal projects that build on top of the Diffusers library
- General questions
- Ethical questions regarding diffusion models
- ...
Every question that is asked on the forum or on Discord actively encourages the community to publicly
share knowledge and might very well help a beginner in the future that has the same question you're
having. Please do pose any questions you might have.
In the same spirit, you are of immense help to the community by answering such questions because this way you are publicly documenting knowledge for everybody to learn from.
**Please** keep in mind that the more effort you put into asking or answering a question, the higher
the quality of the publicly documented knowledge. In the same way, well-posed and well-answered questions create a high-quality knowledge database accessible to everybody, while badly posed questions or answers reduce the overall quality of the public knowledge database.
In short, a high quality question or answer is *precise*, *concise*, *relevant*, *easy-to-understand*, *accesible*, and *well-formated/well-posed*. For more information, please have a look through the [How to write a good issue](#how-to-write-a-good-issue) section.
**NOTE about channels**:
[*The forum*](https://discuss.huggingface.co/c/discussion-related-to-httpsgithubcomhuggingfacediffusers/63) is much better indexed by search engines, such as Google. Posts are ranked by popularity rather than chronologically. Hence, it's easier to look up questions and answers that we posted some time ago.
In addition, questions and answers posted in the forum can easily be linked to.
In contrast, *Discord* has a chat-like format that invites fast back-and-forth communication.
While it will most likely take less time for you to get an answer to your question on Discord, your
question won't be visible anymore over time. Also, it's much harder to find information that was posted a while back on Discord. We therefore strongly recommend using the forum for high-quality questions and answers in an attempt to create long-lasting knowledge for the community. If discussions on Discord lead to very interesting answers and conclusions, we recommend posting the results on the forum to make the information more available for future readers.
### 2. Opening new issues on the GitHub issues tab
The 🧨 Diffusers library is robust and reliable thanks to the users who notify us of
the problems they encounter. So thank you for reporting an issue.
Remember, GitHub issues are reserved for technical questions directly related to the Diffusers library, bug reports, feature requests, or feedback on the library design.
In a nutshell, this means that everything that is **not** related to the **code of the Diffusers library** (including the documentation) should **not** be asked on GitHub, but rather on either the [forum](https://discuss.huggingface.co/c/discussion-related-to-httpsgithubcomhuggingfacediffusers/63) or [Discord](https://discord.gg/G7tWnz98XR).
**Please consider the following guidelines when opening a new issue**:
- Make sure you have searched whether your issue has already been asked before (use the search bar on GitHub under Issues).
- Please never report a new issue on another (related) issue. If another issue is highly related, please
open a new issue nevertheless and link to the related issue.
- Make sure your issue is written in English. Please use one of the great, free online translation services, such as [DeepL](https://www.deepl.com/translator) to translate from your native language to English if you are not comfortable in English.
- Check whether your issue might be solved by updating to the newest Diffusers version. Before posting your issue, please make sure that `python -c "import diffusers; print(diffusers.__version__)"` is higher or matches the latest Diffusers version.
- Remember that the more effort you put into opening a new issue, the higher the quality of your answer will be and the better the overall quality of the Diffusers issues.
New issues usually include the following.
#### 2.1. Reproducible, minimal bug reports.
A bug report should always have a reproducible code snippet and be as minimal and concise as possible.
This means in more detail:
- Narrow the bug down as much as you can, **do not just dump your whole code file**
- Format your code
- Do not include any external libraries except for Diffusers depending on them.
- **Always** provide all necessary information about your environment; for this, you can run: `diffusers-cli env` in your shell and copy-paste the displayed information to the issue.
- Explain the issue. If the reader doesn't know what the issue is and why it is an issue, she cannot solve it.
- **Always** make sure the reader can reproduce your issue with as little effort as possible. If your code snippet cannot be run because of missing libraries or undefined variables, the reader cannot help you. Make sure your reproducible code snippet is as minimal as possible and can be copy-pasted into a simple Python shell.
- If in order to reproduce your issue a model and/or dataset is required, make sure the reader has access to that model or dataset. You can always upload your model or dataset to the [Hub](https://huggingface.co) to make it easily downloadable. Try to keep your model and dataset as small as possible, to make the reproduction of your issue as effortless as possible.
For more information, please have a look through the [How to write a good issue](#how-to-write-a-good-issue) section.
You can open a bug report [here](https://github.com/huggingface/diffusers/issues/new/choose).
#### 2.2. Feature requests.
A world-class feature request addresses the following points:
1. Motivation first:
* Is it related to a problem/frustration with the library? If so, please explain
why. Providing a code snippet that demonstrates the problem is best.
* Is it related to something you would need for a project? We'd love to hear
about it!
* Is it something you worked on and think could benefit the community?
Awesome! Tell us what problem it solved for you.
2. Write a *full paragraph* describing the feature;
3. Provide a **code snippet** that demonstrates its future use;
4. In case this is related to a paper, please attach a link;
5. Attach any additional information (drawings, screenshots, etc.) you think may help.
You can open a feature request [here](https://github.com/huggingface/diffusers/issues/new?assignees=&labels=&template=feature_request.md&title=).
#### 2.3 Feedback.
Feedback about the library design and why it is good or not good helps the core maintainers immensely to build a user-friendly library. To understand the philosophy behind the current design philosophy, please have a look [here](https://huggingface.co/docs/diffusers/conceptual/philosophy). If you feel like a certain design choice does not fit with the current design philosophy, please explain why and how it should be changed. If a certain design choice follows the design philosophy too much, hence restricting use cases, explain why and how it should be changed.
If a certain design choice is very useful for you, please also leave a note as this is great feedback for future design decisions.
You can open an issue about feedback [here](https://github.com/huggingface/diffusers/issues/new?assignees=&labels=&template=feedback.md&title=).
#### 2.4 Technical questions.
Technical questions are mainly about why certain code of the library was written in a certain way, or what a certain part of the code does. Please make sure to link to the code in question and please provide detail on
why this part of the code is difficult to understand.
You can open an issue about a technical question [here](https://github.com/huggingface/diffusers/issues/new?assignees=&labels=bug&template=bug-report.yml).
#### 2.5 Proposal to add a new model, scheduler, or pipeline.
If the diffusion model community released a new model, pipeline, or scheduler that you would like to see in the Diffusers library, please provide the following information:
* Short description of the diffusion pipeline, model, or scheduler and link to the paper or public release.
* Link to any of its open-source implementation.
* Link to the model weights if they are available.
If you are willing to contribute to the model yourself, let us know so we can best guide you. Also, don't forget
to tag the original author of the component (model, scheduler, pipeline, etc.) by GitHub handle if you can find it.
You can open a request for a model/pipeline/scheduler [here](https://github.com/huggingface/diffusers/issues/new?assignees=&labels=New+model%2Fpipeline%2Fscheduler&template=new-model-addition.yml).
### 3. Answering issues on the GitHub issues tab
Answering issues on GitHub might require some technical knowledge of Diffusers, but we encourage everybody to give it a try even if you are not 100% certain that your answer is correct.
Some tips to give a high-quality answer to an issue:
- Be as concise and minimal as possible
- Stay on topic. An answer to the issue should concern the issue and only the issue.
- Provide links to code, papers, or other sources that prove or encourage your point.
- Answer in code. If a simple code snippet is the answer to the issue or shows how the issue can be solved, please provide a fully reproducible code snippet.
Also, many issues tend to be simply off-topic, duplicates of other issues, or irrelevant. It is of great
help to the maintainers if you can answer such issues, encouraging the author of the issue to be
more precise, provide the link to a duplicated issue or redirect them to [the forum](https://discuss.huggingface.co/c/discussion-related-to-httpsgithubcomhuggingfacediffusers/63) or [Discord](https://discord.gg/G7tWnz98XR)
If you have verified that the issued bug report is correct and requires a correction in the source code,
please have a look at the next sections.
For all of the following contributions, you will need to open a PR. It is explained in detail how to do so in the [Opening a pull requst](#how-to-open-a-pr) section.
### 4. Fixing a `Good first issue`
*Good first issues* are marked by the [Good first issue](https://github.com/huggingface/diffusers/issues?q=is%3Aopen+is%3Aissue+label%3A%22good+first+issue%22) label. Usually, the issue already
explains how a potential solution should look so that it is easier to fix.
If the issue hasn't been closed and you would like to try to fix this issue, you can just leave a message "I would like to try this issue.". There are usually three scenarios:
- a.) The issue description already proposes a fix. In this case and if the solution makes sense to you, you can open a PR or draft PR to fix it.
- b.) The issue description does not propose a fix. In this case, you can ask what a proposed fix could look like and someone from the Diffusers team should answer shortly. If you have a good idea of how to fix it, feel free to directly open a PR.
- c.) There is already an open PR to fix the issue, but the issue hasn't been closed yet. If the PR has gone stale, you can simply open a new PR and link to the stale PR. PRs often go stale if the original contributor who wanted to fix the issue suddenly cannot find the time anymore to proceed. This often happens in open-source and is very normal. In this case, the community will be very happy if you give it a new try and leverage the knowledge of the existing PR. If there is already a PR and it is active, you can help the author by giving suggestions, reviewing the PR or even asking whether you can contribute to the PR.
### 5. Contribute to the documentation
A good library **always** has good documentation! The official documentation is often one of the first points of contact for new users of the library, and therefore contributing to the documentation is a **highly
valuable contribution**.
Contributing to the library can have many forms:
- Correcting spelling or grammatical errors.
- Correct incorrect formatting of the docstring. If you see that the official documentation is weirdly displayed or a link is broken, we are very happy if you take some time to correct it.
- Correct the shape or dimensions of a docstring input or output tensor.
- Clarify documentation that is hard to understand or incorrect.
- Update outdated code examples.
- Translating the documentation to another language.
Anything displayed on [the official Diffusers doc page](https://huggingface.co/docs/diffusers/index) is part of the official documentation and can be corrected, adjusted in the respective [documentation source](https://github.com/huggingface/diffusers/tree/main/docs/source).
Please have a look at [this page](https://github.com/huggingface/diffusers/tree/main/docs) on how to verify changes made to the documentation locally.
### 6. Contribute a community pipeline
[Pipelines](https://huggingface.co/docs/diffusers/api/pipelines/overview) are usually the first point of contact between the Diffusers library and the user.
Pipelines are examples of how to use Diffusers [models](https://huggingface.co/docs/diffusers/api/models) and [schedulers](https://huggingface.co/docs/diffusers/api/schedulers/overview).
We support two types of pipelines:
- Official Pipelines
- Community Pipelines
Both official and community pipelines follow the same design and consist of the same type of components.
Official pipelines are tested and maintained by the core maintainers of Diffusers. Their code
resides in [src/diffusers/pipelines](https://github.com/huggingface/diffusers/tree/main/src/diffusers/pipelines).
In contrast, community pipelines are contributed and maintained purely by the **community** and are **not** tested.
They reside in [examples/community](https://github.com/huggingface/diffusers/tree/main/examples/community) and while they can be accessed via the [PyPI diffusers package](https://pypi.org/project/diffusers/), their code is not part of the PyPI distribution.
The reason for the distinction is that the core maintainers of the Diffusers library cannot maintain and test all
possible ways diffusion models can be used for inference, but some of them may be of interest to the community.
Officially released diffusion pipelines,
such as Stable Diffusion are added to the core src/diffusers/pipelines package which ensures
high quality of maintenance, no backward-breaking code changes, and testing.
More bleeding edge pipelines should be added as community pipelines. If usage for a community pipeline is high, the pipeline can be moved to the official pipelines upon request from the community. This is one of the ways we strive to be a community-driven library.
To add a community pipeline, one should add a <name-of-the-community>.py file to [examples/community](https://github.com/huggingface/diffusers/tree/main/examples/community) and adapt the [examples/community/README.md](https://github.com/huggingface/diffusers/tree/main/examples/community/README.md) to include an example of the new pipeline.
An example can be seen [here](https://github.com/huggingface/diffusers/pull/2400).
Community pipeline PRs are only checked at a superficial level and ideally they should be maintained by their original authors.
Contributing a community pipeline is a great way to understand how Diffusers models and schedulers work. Having contributed a community pipeline is usually the first stepping stone to contributing an official pipeline to the
core package.
### 7. Contribute to training examples
Diffusers examples are a collection of training scripts that reside in [examples](https://github.com/huggingface/diffusers/tree/main/examples).
We support two types of training examples:
- Official training examples
- Research training examples
Research training examples are located in [examples/research_projects](https://github.com/huggingface/diffusers/tree/main/examples/research_projects) whereas official training examples include all folders under [examples](https://github.com/huggingface/diffusers/tree/main/examples) except the `research_projects` and `community` folders.
The official training examples are maintained by the Diffusers' core maintainers whereas the research training examples are maintained by the community.
This is because of the same reasons put forward in [6. Contribute a community pipeline](#contribute-a-community-pipeline) for official pipelines vs. community pipelines: It is not feasible for the core maintainers to maintain all possible training methods for diffusion models.
If the Diffusers core maintainers and the community consider a certain training paradigm to be too experimental or not popular enough, the corresponding training code should be put in the `research_projects` folder and maintained by the author.
Both official training and research examples consist of a directory that contains one or more training scripts, a requirements.txt file, and a README.md file. In order for the user to make use of the
training examples, it is required to clone the repository:
```
git clone https://github.com/huggingface/diffusers
```
as well as to install all additional dependencies required for training:
```
pip install -r /examples/<your-example-folder>/requirements.txt
```
Therefore when adding an example, the `requirements.txt` file shall define all pip dependencies required for your training example so that once all those are installed, the user can run the example's training script. See, for example, the [DreamBooth `requirements.txt` file](https://github.com/huggingface/diffusers/blob/main/examples/dreambooth/requirements.txt).
Training examples of the Diffusers library should adhere to the following philosophy:
- All the code necessary to run the examples should be found in a single Python file
- One should be able to run the example from the command line with `python <your-example>.py --args`
- Examples should be kept simple and serve as **an example** on how to use Diffusers for training. The purpose of example scripts is **not** to create state-of-the-art diffusion models, but rather to reproduce known training schemes without adding too much custom logic. As a byproduct of this point, our examples also strive to serve as good educational materials.
To contribute an example, it is highly recommended to look at already existing examples such as [dreambooth](https://github.com/huggingface/diffusers/blob/main/examples/dreambooth/train_dreambooth.py) to get an idea of how they should look like.
We strongly advise contributors to make use of the [Accelerate library](https://github.com/huggingface/accelerate) as it's tightly integrated
with Diffusers.
Once an example script works, please make sure to add a comprehensive `README.md` that states how to use the example exactly. This README should include:
- An example command on how to run the example script as shown [here e.g.](https://github.com/huggingface/diffusers/tree/main/examples/dreambooth#running-locally-with-pytorch).
- A link to some training results (logs, models, ...) that show what the user can expect as shown [here e.g.](https://api.wandb.ai/report/patrickvonplaten/xm6cd5q5).
- If you are adding a non-official/research training example, **please don't forget** to add a sentence that you are maintaining this training example which includes your git handle as shown [here](https://github.com/huggingface/diffusers/tree/main/examples/research_projects/intel_opts#diffusers-examples-with-intel-optimizations).
If you are contributing to the official training examples, please also make sure to add a test to [examples/test_examples.py](https://github.com/huggingface/diffusers/blob/main/examples/test_examples.py). This is not necessary for non-official training examples.
### 8. Fixing a `Good second issue`
*Good second issues* are marked by the [Good second issue](https://github.com/huggingface/diffusers/issues?q=is%3Aopen+is%3Aissue+label%3A%22Good+second+issue%22) label. Good second issues are
usually more complicated to solve than [Good first issues](https://github.com/huggingface/diffusers/issues?q=is%3Aopen+is%3Aissue+label%3A%22good+first+issue%22).
The issue description usually gives less guidance on how to fix the issue and requires
a decent understanding of the library by the interested contributor.
If you are interested in tackling a second good issue, feel free to open a PR to fix it and link the PR to the issue. If you see that a PR has already been opened for this issue but did not get merged, have a look to understand why it wasn't merged and try to open an improved PR.
Good second issues are usually more difficult to get merged compared to good first issues, so don't hesitate to ask for help from the core maintainers. If your PR is almost finished the core maintainers can also jump into your PR and commit to it in order to get it merged.
### 9. Adding pipelines, models, schedulers
Pipelines, models, and schedulers are the most important pieces of the Diffusers library.
They provide easy access to state-of-the-art diffusion technologies and thus allow the community to
build powerful generative AI applications.
By adding a new model, pipeline, or scheduler you might enable a new powerful use case for any of the user interfaces relying on Diffusers which can be of immense value for the whole generative AI ecosystem.
Diffusers has a couple of open feature requests for all three components - feel free to gloss over them
if you don't know yet what specific component you would like to add:
- [Model or pipeline](https://github.com/huggingface/diffusers/issues?q=is%3Aopen+is%3Aissue+label%3A%22New+pipeline%2Fmodel%22)
- [Scheduler](https://github.com/huggingface/diffusers/issues?q=is%3Aopen+is%3Aissue+label%3A%22New+scheduler%22)
Before adding any of the three components, it is strongly recommended that you give the [Philosophy guide](https://github.com/huggingface/diffusers/issues?q=is%3Aopen+is%3Aissue+label%3A%22Good+second+issue%22) a read to better understand the design of any of the three components. Please be aware that
we cannot merge model, scheduler, or pipeline additions that strongly diverge from our design philosophy
as it will lead to API inconsistencies. If you fundamentally disagree with a design choice, please
open a [Feedback issue](https://github.com/huggingface/diffusers/issues/new?assignees=&labels=&template=feedback.md&title=) instead so that it can be discussed whether a certain design
pattern/design choice shall be changed everywhere in the library and whether we shall update our design philosophy. Consistency across the library is very important for us.
Please make sure to add links to the original codebase/paper to the PR and ideally also ping the
original author directly on the PR so that they can follow the progress and potentially help with questions.
If you are unsure or stuck in the PR, don't hesitate to leave a message to ask for a first review or help.
## How to write a good issue
**The better your issue is written, the higher the chances that it will be quickly resolved.**
1. Make sure that you've used the correct template for your issue. You can pick between *Bug Report*, *Feature Request*, *Feedback about API Design*, *New model/pipeline/scheduler addition*, *Forum*, or a blank issue. Make sure to pick the correct one when opening [a new issue](https://github.com/huggingface/diffusers/issues/new/choose).
2. **Be precise**: Give your issue a fitting title. Try to formulate your issue description as simple as possible. The more precise you are when submitting an issue, the less time it takes to understand the issue and potentially solve it. Make sure to open an issue for one issue only and not for multiple issues. If you found multiple issues, simply open multiple issues. If your issue is a bug, try to be as precise as possible about what bug it is - you should not just write "Error in diffusers".
3. **Reproducibility**: No reproducible code snippet == no solution. If you encounter a bug, maintainers **have to be able to reproduce** it. Make sure that you include a code snippet that can be copy-pasted into a Python interpreter to reproduce the issue. Make sure that your code snippet works, *i.e.* that there are no missing imports or missing links to images, ... Your issue should contain an error message **and** a code snippet that can be copy-pasted without any changes to reproduce the exact same error message. If your issue is using local model weights or local data that cannot be accessed by the reader, the issue cannot be solved. If you cannot share your data or model, try to make a dummy model or dummy data.
4. **Minimalistic**: Try to help the reader as much as you can to understand the issue as quickly as possible by staying as concise as possible. Remove all code / all information that is irrelevant to the issue. If you have found a bug, try to create the easiest code example you can to demonstrate your issue, do not just dump your whole workflow into the issue as soon as you have found a bug. E.g., if you train a model and get an error at some point during the training, you should first try to understand what part of the training code is responsible for the error and try to reproduce it with a couple of lines. Try to use dummy data instead of full datasets.
5. Add links. If you are referring to a certain naming, method, or model make sure to provide a link so that the reader can better understand what you mean. If you are referring to a specific PR or issue, make sure to link it to your issue. Do not assume that the reader knows what you are talking about. The more links you add to your issue the better.
6. Formatting. Make sure to nicely format your issue by formatting code into Python code syntax, and error messages into normal code syntax. See the [official GitHub formatting docs](https://docs.github.com/en/get-started/writing-on-github/getting-started-with-writing-and-formatting-on-github/basic-writing-and-formatting-syntax) for more information.
7. Think of your issue not as a ticket to be solved, but rather as a beautiful entry to a well-written encyclopedia. Every added issue is a contribution to publicly available knowledge. By adding a nicely written issue you not only make it easier for maintainers to solve your issue, but you are helping the whole community to better understand a certain aspect of the library.
## How to write a good PR
1. Be a chameleon. Understand existing design patterns and syntax and make sure your code additions flow seamlessly into the existing code base. Pull requests that significantly diverge from existing design patterns or user interfaces will not be merged.
2. Be laser focused. A pull request should solve one problem and one problem only. Make sure to not fall into the trap of "also fixing another problem while we're adding it". It is much more difficult to review pull requests that solve multiple, unrelated problems at once.
3. If helpful, try to add a code snippet that displays an example of how your addition can be used.
4. The title of your pull request should be a summary of its contribution.
5. If your pull request addresses an issue, please mention the issue number in
the pull request description to make sure they are linked (and people
consulting the issue know you are working on it);
6. To indicate a work in progress please prefix the title with `[WIP]`. These
are useful to avoid duplicated work, and to differentiate it from PRs ready
to be merged;
7. Try to formulate and format your text as explained in [How to write a good issue](#how-to-write-a-good-issue).
8. Make sure existing tests pass;
9. Add high-coverage tests. No quality testing = no merge.
- If you are adding new `@slow` tests, make sure they pass using
`RUN_SLOW=1 python -m pytest tests/test_my_new_model.py`.
CircleCI does not run the slow tests, but GitHub actions does every night!
10. All public methods must have informative docstrings that work nicely with markdown. See `[pipeline_latent_diffusion.py](https://github.com/huggingface/diffusers/blob/main/src/diffusers/pipelines/latent_diffusion/pipeline_latent_diffusion.py)` for an example.
11. Due to the rapidly growing repository, it is important to make sure that no files that would significantly weigh down the repository are added. This includes images, videos, and other non-text files. We prefer to leverage a hf.co hosted `dataset` like
[`hf-internal-testing`](https://huggingface.co/hf-internal-testing) or [huggingface/documentation-images](https://huggingface.co/datasets/huggingface/documentation-images) to place these files.
If an external contribution, feel free to add the images to your PR and ask a Hugging Face member to migrate your images
to this dataset.
## How to open a PR
Before writing code, we strongly advise you to search through the existing PRs or
issues to make sure that nobody is already working on the same thing. If you are
unsure, it is always a good idea to open an issue to get some feedback.
You will need basic `git` proficiency to be able to contribute to
🧨 Diffusers. `git` is not the easiest tool to use but it has the greatest
manual. Type `git --help` in a shell and enjoy. If you prefer books, [Pro
Git](https://git-scm.com/book/en/v2) is a very good reference.
Follow these steps to start contributing ([supported Python versions](https://github.com/huggingface/diffusers/blob/main/setup.py#L244)):
1. Fork the [repository](https://github.com/huggingface/diffusers) by
clicking on the 'Fork' button on the repository's page. This creates a copy of the code
under your GitHub user account.
2. Clone your fork to your local disk, and add the base repository as a remote:
```bash
$ git clone [email protected]:<your Github handle>/diffusers.git
$ cd diffusers
$ git remote add upstream https://github.com/huggingface/diffusers.git
```
3. Create a new branch to hold your development changes:
```bash
$ git checkout -b a-descriptive-name-for-my-changes
```
**Do not** work on the `main` branch.
4. Set up a development environment by running the following command in a virtual environment:
```bash
$ pip install -e ".[dev]"
```
If you have already cloned the repo, you might need to `git pull` to get the most recent changes in the
library.
5. Develop the features on your branch.
As you work on the features, you should make sure that the test suite
passes. You should run the tests impacted by your changes like this:
```bash
$ pytest tests/<TEST_TO_RUN>.py
```
You can also run the full suite with the following command, but it takes
a beefy machine to produce a result in a decent amount of time now that
Diffusers has grown a lot. Here is the command for it:
```bash
$ make test
```
🧨 Diffusers relies on `black` and `isort` to format its source code
consistently. After you make changes, apply automatic style corrections and code verifications
that can't be automated in one go with:
```bash
$ make style
```
🧨 Diffusers also uses `ruff` and a few custom scripts to check for coding mistakes. Quality
control runs in CI, however, you can also run the same checks with:
```bash
$ make quality
```
Once you're happy with your changes, add changed files using `git add` and
make a commit with `git commit` to record your changes locally:
```bash
$ git add modified_file.py
$ git commit
```
It is a good idea to sync your copy of the code with the original
repository regularly. This way you can quickly account for changes:
```bash
$ git pull upstream main
```
Push the changes to your account using:
```bash
$ git push -u origin a-descriptive-name-for-my-changes
```
6. Once you are satisfied, go to the
webpage of your fork on GitHub. Click on 'Pull request' to send your changes
to the project maintainers for review.
7. It's ok if maintainers ask you for changes. It happens to core contributors
too! So everyone can see the changes in the Pull request, work in your local
branch and push the changes to your fork. They will automatically appear in
the pull request.
### Tests
An extensive test suite is included to test the library behavior and several examples. Library tests can be found in
the [tests folder](https://github.com/huggingface/diffusers/tree/main/tests).
We like `pytest` and `pytest-xdist` because it's faster. From the root of the
repository, here's how to run tests with `pytest` for the library:
```bash
$ python -m pytest -n auto --dist=loadfile -s -v ./tests/
```
In fact, that's how `make test` is implemented!
You can specify a smaller set of tests in order to test only the feature
you're working on.
By default, slow tests are skipped. Set the `RUN_SLOW` environment variable to
`yes` to run them. This will download many gigabytes of models — make sure you
have enough disk space and a good Internet connection, or a lot of patience!
```bash
$ RUN_SLOW=yes python -m pytest -n auto --dist=loadfile -s -v ./tests/
```
`unittest` is fully supported, here's how to run tests with it:
```bash
$ python -m unittest discover -s tests -t . -v
$ python -m unittest discover -s examples -t examples -v
```
### Syncing forked main with upstream (HuggingFace) main
To avoid pinging the upstream repository which adds reference notes to each upstream PR and sends unnecessary notifications to the developers involved in these PRs,
when syncing the main branch of a forked repository, please, follow these steps:
1. When possible, avoid syncing with the upstream using a branch and PR on the forked repository. Instead, merge directly into the forked main.
2. If a PR is absolutely necessary, use the following steps after checking out your branch:
```
$ git checkout -b your-branch-for-syncing
$ git pull --squash --no-commit upstream main
$ git commit -m '<your message without GitHub references>'
$ git push --set-upstream origin your-branch-for-syncing
```
### Style guide
For documentation strings, 🧨 Diffusers follows the [google style](https://google.github.io/styleguide/pyguide.html).
| 0 |
hf_public_repos/diffusers/docs/source/en | hf_public_repos/diffusers/docs/source/en/conceptual/philosophy.md | <!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# Philosophy
🧨 Diffusers provides **state-of-the-art** pretrained diffusion models across multiple modalities.
Its purpose is to serve as a **modular toolbox** for both inference and training.
We aim at building a library that stands the test of time and therefore take API design very seriously.
In a nutshell, Diffusers is built to be a natural extension of PyTorch. Therefore, most of our design choices are based on [PyTorch's Design Principles](https://pytorch.org/docs/stable/community/design.html#pytorch-design-philosophy). Let's go over the most important ones:
## Usability over Performance
- While Diffusers has many built-in performance-enhancing features (see [Memory and Speed](https://huggingface.co/docs/diffusers/optimization/fp16)), models are always loaded with the highest precision and lowest optimization. Therefore, by default diffusion pipelines are always instantiated on CPU with float32 precision if not otherwise defined by the user. This ensures usability across different platforms and accelerators and means that no complex installations are required to run the library.
- Diffusers aim at being a **light-weight** package and therefore has very few required dependencies, but many soft dependencies that can improve performance (such as `accelerate`, `safetensors`, `onnx`, etc...). We strive to keep the library as lightweight as possible so that it can be added without much concern as a dependency on other packages.
- Diffusers prefers simple, self-explainable code over condensed, magic code. This means that short-hand code syntaxes such as lambda functions, and advanced PyTorch operators are often not desired.
## Simple over easy
As PyTorch states, **explicit is better than implicit** and **simple is better than complex**. This design philosophy is reflected in multiple parts of the library:
- We follow PyTorch's API with methods like [`DiffusionPipeline.to`](https://huggingface.co/docs/diffusers/main/en/api/diffusion_pipeline#diffusers.DiffusionPipeline.to) to let the user handle device management.
- Raising concise error messages is preferred to silently correct erroneous input. Diffusers aims at teaching the user, rather than making the library as easy to use as possible.
- Complex model vs. scheduler logic is exposed instead of magically handled inside. Schedulers/Samplers are separated from diffusion models with minimal dependencies on each other. This forces the user to write the unrolled denoising loop. However, the separation allows for easier debugging and gives the user more control over adapting the denoising process or switching out diffusion models or schedulers.
- Separately trained components of the diffusion pipeline, *e.g.* the text encoder, the unet, and the variational autoencoder, each have their own model class. This forces the user to handle the interaction between the different model components, and the serialization format separates the model components into different files. However, this allows for easier debugging and customization. Dreambooth or textual inversion training
is very simple thanks to diffusers' ability to separate single components of the diffusion pipeline.
## Tweakable, contributor-friendly over abstraction
For large parts of the library, Diffusers adopts an important design principle of the [Transformers library](https://github.com/huggingface/transformers), which is to prefer copy-pasted code over hasty abstractions. This design principle is very opinionated and stands in stark contrast to popular design principles such as [Don't repeat yourself (DRY)](https://en.wikipedia.org/wiki/Don%27t_repeat_yourself).
In short, just like Transformers does for modeling files, diffusers prefers to keep an extremely low level of abstraction and very self-contained code for pipelines and schedulers.
Functions, long code blocks, and even classes can be copied across multiple files which at first can look like a bad, sloppy design choice that makes the library unmaintainable.
**However**, this design has proven to be extremely successful for Transformers and makes a lot of sense for community-driven, open-source machine learning libraries because:
- Machine Learning is an extremely fast-moving field in which paradigms, model architectures, and algorithms are changing rapidly, which therefore makes it very difficult to define long-lasting code abstractions.
- Machine Learning practitioners like to be able to quickly tweak existing code for ideation and research and therefore prefer self-contained code over one that contains many abstractions.
- Open-source libraries rely on community contributions and therefore must build a library that is easy to contribute to. The more abstract the code, the more dependencies, the harder to read, and the harder to contribute to. Contributors simply stop contributing to very abstract libraries out of fear of breaking vital functionality. If contributing to a library cannot break other fundamental code, not only is it more inviting for potential new contributors, but it is also easier to review and contribute to multiple parts in parallel.
At Hugging Face, we call this design the **single-file policy** which means that almost all of the code of a certain class should be written in a single, self-contained file. To read more about the philosophy, you can have a look
at [this blog post](https://huggingface.co/blog/transformers-design-philosophy).
In diffusers, we follow this philosophy for both pipelines and schedulers, but only partly for diffusion models. The reason we don't follow this design fully for diffusion models is because almost all diffusion pipelines, such
as [DDPM](https://huggingface.co/docs/diffusers/v0.12.0/en/api/pipelines/ddpm), [Stable Diffusion](https://huggingface.co/docs/diffusers/v0.12.0/en/api/pipelines/stable_diffusion/overview#stable-diffusion-pipelines), [UnCLIP (Dalle-2)](https://huggingface.co/docs/diffusers/v0.12.0/en/api/pipelines/unclip#overview) and [Imagen](https://imagen.research.google/) all rely on the same diffusion model, the [UNet](https://huggingface.co/docs/diffusers/api/models#diffusers.UNet2DConditionModel).
Great, now you should have generally understood why 🧨 Diffusers is designed the way it is 🤗.
We try to apply these design principles consistently across the library. Nevertheless, there are some minor exceptions to the philosophy or some unlucky design choices. If you have feedback regarding the design, we would ❤️ to hear it [directly on GitHub](https://github.com/huggingface/diffusers/issues/new?assignees=&labels=&template=feedback.md&title=).
## Design Philosophy in Details
Now, let's look a bit into the nitty-gritty details of the design philosophy. Diffusers essentially consist of three major classes, [pipelines](https://github.com/huggingface/diffusers/tree/main/src/diffusers/pipelines), [models](https://github.com/huggingface/diffusers/tree/main/src/diffusers/models), and [schedulers](https://github.com/huggingface/diffusers/tree/main/src/diffusers/schedulers).
Let's walk through more in-detail design decisions for each class.
### Pipelines
Pipelines are designed to be easy to use (therefore do not follow [*Simple over easy*](#simple-over-easy) 100%), are not feature complete, and should loosely be seen as examples of how to use [models](#models) and [schedulers](#schedulers) for inference.
The following design principles are followed:
- Pipelines follow the single-file policy. All pipelines can be found in individual directories under src/diffusers/pipelines. One pipeline folder corresponds to one diffusion paper/project/release. Multiple pipeline files can be gathered in one pipeline folder, as it’s done for [`src/diffusers/pipelines/stable-diffusion`](https://github.com/huggingface/diffusers/tree/main/src/diffusers/pipelines/stable_diffusion). If pipelines share similar functionality, one can make use of the [#Copied from mechanism](https://github.com/huggingface/diffusers/blob/125d783076e5bd9785beb05367a2d2566843a271/src/diffusers/pipelines/stable_diffusion/pipeline_stable_diffusion_img2img.py#L251).
- Pipelines all inherit from [`DiffusionPipeline`].
- Every pipeline consists of different model and scheduler components, that are documented in the [`model_index.json` file](https://huggingface.co/runwayml/stable-diffusion-v1-5/blob/main/model_index.json), are accessible under the same name as attributes of the pipeline and can be shared between pipelines with [`DiffusionPipeline.components`](https://huggingface.co/docs/diffusers/main/en/api/diffusion_pipeline#diffusers.DiffusionPipeline.components) function.
- Every pipeline should be loadable via the [`DiffusionPipeline.from_pretrained`](https://huggingface.co/docs/diffusers/main/en/api/diffusion_pipeline#diffusers.DiffusionPipeline.from_pretrained) function.
- Pipelines should be used **only** for inference.
- Pipelines should be very readable, self-explanatory, and easy to tweak.
- Pipelines should be designed to build on top of each other and be easy to integrate into higher-level APIs.
- Pipelines are **not** intended to be feature-complete user interfaces. For future complete user interfaces one should rather have a look at [InvokeAI](https://github.com/invoke-ai/InvokeAI), [Diffuzers](https://github.com/abhishekkrthakur/diffuzers), and [lama-cleaner](https://github.com/Sanster/lama-cleaner).
- Every pipeline should have one and only one way to run it via a `__call__` method. The naming of the `__call__` arguments should be shared across all pipelines.
- Pipelines should be named after the task they are intended to solve.
- In almost all cases, novel diffusion pipelines shall be implemented in a new pipeline folder/file.
### Models
Models are designed as configurable toolboxes that are natural extensions of [PyTorch's Module class](https://pytorch.org/docs/stable/generated/torch.nn.Module.html). They only partly follow the **single-file policy**.
The following design principles are followed:
- Models correspond to **a type of model architecture**. *E.g.* the [`UNet2DConditionModel`] class is used for all UNet variations that expect 2D image inputs and are conditioned on some context.
- All models can be found in [`src/diffusers/models`](https://github.com/huggingface/diffusers/tree/main/src/diffusers/models) and every model architecture shall be defined in its file, e.g. [`unet_2d_condition.py`](https://github.com/huggingface/diffusers/blob/main/src/diffusers/models/unet_2d_condition.py), [`transformer_2d.py`](https://github.com/huggingface/diffusers/blob/main/src/diffusers/models/transformer_2d.py), etc...
- Models **do not** follow the single-file policy and should make use of smaller model building blocks, such as [`attention.py`](https://github.com/huggingface/diffusers/blob/main/src/diffusers/models/attention.py), [`resnet.py`](https://github.com/huggingface/diffusers/blob/main/src/diffusers/models/resnet.py), [`embeddings.py`](https://github.com/huggingface/diffusers/blob/main/src/diffusers/models/embeddings.py), etc... **Note**: This is in stark contrast to Transformers' modeling files and shows that models do not really follow the single-file policy.
- Models intend to expose complexity, just like PyTorch's module does, and give clear error messages.
- Models all inherit from `ModelMixin` and `ConfigMixin`.
- Models can be optimized for performance when it doesn’t demand major code changes, keeps backward compatibility, and gives significant memory or compute gain.
- Models should by default have the highest precision and lowest performance setting.
- To integrate new model checkpoints whose general architecture can be classified as an architecture that already exists in Diffusers, the existing model architecture shall be adapted to make it work with the new checkpoint. One should only create a new file if the model architecture is fundamentally different.
- Models should be designed to be easily extendable to future changes. This can be achieved by limiting public function arguments, configuration arguments, and "foreseeing" future changes, *e.g.* it is usually better to add `string` "...type" arguments that can easily be extended to new future types instead of boolean `is_..._type` arguments. Only the minimum amount of changes shall be made to existing architectures to make a new model checkpoint work.
- The model design is a difficult trade-off between keeping code readable and concise and supporting many model checkpoints. For most parts of the modeling code, classes shall be adapted for new model checkpoints, while there are some exceptions where it is preferred to add new classes to make sure the code is kept concise and
readable longterm, such as [UNet blocks](https://github.com/huggingface/diffusers/blob/main/src/diffusers/models/unet_2d_blocks.py) and [Attention processors](https://github.com/huggingface/diffusers/blob/main/src/diffusers/models/attention_processor.py).
### Schedulers
Schedulers are responsible to guide the denoising process for inference as well as to define a noise schedule for training. They are designed as individual classes with loadable configuration files and strongly follow the **single-file policy**.
The following design principles are followed:
- All schedulers are found in [`src/diffusers/schedulers`](https://github.com/huggingface/diffusers/tree/main/src/diffusers/schedulers).
- Schedulers are **not** allowed to import from large utils files and shall be kept very self-contained.
- One scheduler python file corresponds to one scheduler algorithm (as might be defined in a paper).
- If schedulers share similar functionalities, we can make use of the `#Copied from` mechanism.
- Schedulers all inherit from `SchedulerMixin` and `ConfigMixin`.
- Schedulers can be easily swapped out with the [`ConfigMixin.from_config`](https://huggingface.co/docs/diffusers/main/en/api/configuration#diffusers.ConfigMixin.from_config) method as explained in detail [here](./using-diffusers/schedulers.md).
- Every scheduler has to have a `set_num_inference_steps`, and a `step` function. `set_num_inference_steps(...)` has to be called before every denoising process, *i.e.* before `step(...)` is called.
- Every scheduler exposes the timesteps to be "looped over" via a `timesteps` attribute, which is an array of timesteps the model will be called upon.
- The `step(...)` function takes a predicted model output and the "current" sample (x_t) and returns the "previous", slightly more denoised sample (x_t-1).
- Given the complexity of diffusion schedulers, the `step` function does not expose all the complexity and can be a bit of a "black box".
- In almost all cases, novel schedulers shall be implemented in a new scheduling file.
| 0 |
hf_public_repos/diffusers/docs/source/en | hf_public_repos/diffusers/docs/source/en/tutorials/basic_training.md | <!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
[[open-in-colab]]
# Train a diffusion model
Unconditional image generation is a popular application of diffusion models that generates images that look like those in the dataset used for training. Typically, the best results are obtained from finetuning a pretrained model on a specific dataset. You can find many of these checkpoints on the [Hub](https://huggingface.co/search/full-text?q=unconditional-image-generation&type=model), but if you can't find one you like, you can always train your own!
This tutorial will teach you how to train a [`UNet2DModel`] from scratch on a subset of the [Smithsonian Butterflies](https://huggingface.co/datasets/huggan/smithsonian_butterflies_subset) dataset to generate your own 🦋 butterflies 🦋.
<Tip>
💡 This training tutorial is based on the [Training with 🧨 Diffusers](https://colab.research.google.com/github/huggingface/notebooks/blob/main/diffusers/training_example.ipynb) notebook. For additional details and context about diffusion models like how they work, check out the notebook!
</Tip>
Before you begin, make sure you have 🤗 Datasets installed to load and preprocess image datasets, and 🤗 Accelerate, to simplify training on any number of GPUs. The following command will also install [TensorBoard](https://www.tensorflow.org/tensorboard) to visualize training metrics (you can also use [Weights & Biases](https://docs.wandb.ai/) to track your training).
```py
# uncomment to install the necessary libraries in Colab
#!pip install diffusers[training]
```
We encourage you to share your model with the community, and in order to do that, you'll need to login to your Hugging Face account (create one [here](https://hf.co/join) if you don't already have one!). You can login from a notebook and enter your token when prompted:
```py
>>> from huggingface_hub import notebook_login
>>> notebook_login()
```
Or login in from the terminal:
```bash
huggingface-cli login
```
Since the model checkpoints are quite large, install [Git-LFS](https://git-lfs.com/) to version these large files:
```bash
!sudo apt -qq install git-lfs
!git config --global credential.helper store
```
## Training configuration
For convenience, create a `TrainingConfig` class containing the training hyperparameters (feel free to adjust them):
```py
>>> from dataclasses import dataclass
>>> @dataclass
... class TrainingConfig:
... image_size = 128 # the generated image resolution
... train_batch_size = 16
... eval_batch_size = 16 # how many images to sample during evaluation
... num_epochs = 50
... gradient_accumulation_steps = 1
... learning_rate = 1e-4
... lr_warmup_steps = 500
... save_image_epochs = 10
... save_model_epochs = 30
... mixed_precision = "fp16" # `no` for float32, `fp16` for automatic mixed precision
... output_dir = "ddpm-butterflies-128" # the model name locally and on the HF Hub
... push_to_hub = True # whether to upload the saved model to the HF Hub
... hub_private_repo = False
... overwrite_output_dir = True # overwrite the old model when re-running the notebook
... seed = 0
>>> config = TrainingConfig()
```
## Load the dataset
You can easily load the [Smithsonian Butterflies](https://huggingface.co/datasets/huggan/smithsonian_butterflies_subset) dataset with the 🤗 Datasets library:
```py
>>> from datasets import load_dataset
>>> config.dataset_name = "huggan/smithsonian_butterflies_subset"
>>> dataset = load_dataset(config.dataset_name, split="train")
```
<Tip>
💡 You can find additional datasets from the [HugGan Community Event](https://huggingface.co/huggan) or you can use your own dataset by creating a local [`ImageFolder`](https://huggingface.co/docs/datasets/image_dataset#imagefolder). Set `config.dataset_name` to the repository id of the dataset if it is from the HugGan Community Event, or `imagefolder` if you're using your own images.
</Tip>
🤗 Datasets uses the [`~datasets.Image`] feature to automatically decode the image data and load it as a [`PIL.Image`](https://pillow.readthedocs.io/en/stable/reference/Image.html) which we can visualize:
```py
>>> import matplotlib.pyplot as plt
>>> fig, axs = plt.subplots(1, 4, figsize=(16, 4))
>>> for i, image in enumerate(dataset[:4]["image"]):
... axs[i].imshow(image)
... axs[i].set_axis_off()
>>> fig.show()
```
<div class="flex justify-center">
<img src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/butterflies_ds.png"/>
</div>
The images are all different sizes though, so you'll need to preprocess them first:
* `Resize` changes the image size to the one defined in `config.image_size`.
* `RandomHorizontalFlip` augments the dataset by randomly mirroring the images.
* `Normalize` is important to rescale the pixel values into a [-1, 1] range, which is what the model expects.
```py
>>> from torchvision import transforms
>>> preprocess = transforms.Compose(
... [
... transforms.Resize((config.image_size, config.image_size)),
... transforms.RandomHorizontalFlip(),
... transforms.ToTensor(),
... transforms.Normalize([0.5], [0.5]),
... ]
... )
```
Use 🤗 Datasets' [`~datasets.Dataset.set_transform`] method to apply the `preprocess` function on the fly during training:
```py
>>> def transform(examples):
... images = [preprocess(image.convert("RGB")) for image in examples["image"]]
... return {"images": images}
>>> dataset.set_transform(transform)
```
Feel free to visualize the images again to confirm that they've been resized. Now you're ready to wrap the dataset in a [DataLoader](https://pytorch.org/docs/stable/data#torch.utils.data.DataLoader) for training!
```py
>>> import torch
>>> train_dataloader = torch.utils.data.DataLoader(dataset, batch_size=config.train_batch_size, shuffle=True)
```
## Create a UNet2DModel
Pretrained models in 🧨 Diffusers are easily created from their model class with the parameters you want. For example, to create a [`UNet2DModel`]:
```py
>>> from diffusers import UNet2DModel
>>> model = UNet2DModel(
... sample_size=config.image_size, # the target image resolution
... in_channels=3, # the number of input channels, 3 for RGB images
... out_channels=3, # the number of output channels
... layers_per_block=2, # how many ResNet layers to use per UNet block
... block_out_channels=(128, 128, 256, 256, 512, 512), # the number of output channels for each UNet block
... down_block_types=(
... "DownBlock2D", # a regular ResNet downsampling block
... "DownBlock2D",
... "DownBlock2D",
... "DownBlock2D",
... "AttnDownBlock2D", # a ResNet downsampling block with spatial self-attention
... "DownBlock2D",
... ),
... up_block_types=(
... "UpBlock2D", # a regular ResNet upsampling block
... "AttnUpBlock2D", # a ResNet upsampling block with spatial self-attention
... "UpBlock2D",
... "UpBlock2D",
... "UpBlock2D",
... "UpBlock2D",
... ),
... )
```
It is often a good idea to quickly check the sample image shape matches the model output shape:
```py
>>> sample_image = dataset[0]["images"].unsqueeze(0)
>>> print("Input shape:", sample_image.shape)
Input shape: torch.Size([1, 3, 128, 128])
>>> print("Output shape:", model(sample_image, timestep=0).sample.shape)
Output shape: torch.Size([1, 3, 128, 128])
```
Great! Next, you'll need a scheduler to add some noise to the image.
## Create a scheduler
The scheduler behaves differently depending on whether you're using the model for training or inference. During inference, the scheduler generates image from the noise. During training, the scheduler takes a model output - or a sample - from a specific point in the diffusion process and applies noise to the image according to a *noise schedule* and an *update rule*.
Let's take a look at the [`DDPMScheduler`] and use the `add_noise` method to add some random noise to the `sample_image` from before:
```py
>>> import torch
>>> from PIL import Image
>>> from diffusers import DDPMScheduler
>>> noise_scheduler = DDPMScheduler(num_train_timesteps=1000)
>>> noise = torch.randn(sample_image.shape)
>>> timesteps = torch.LongTensor([50])
>>> noisy_image = noise_scheduler.add_noise(sample_image, noise, timesteps)
>>> Image.fromarray(((noisy_image.permute(0, 2, 3, 1) + 1.0) * 127.5).type(torch.uint8).numpy()[0])
```
<div class="flex justify-center">
<img src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/noisy_butterfly.png"/>
</div>
The training objective of the model is to predict the noise added to the image. The loss at this step can be calculated by:
```py
>>> import torch.nn.functional as F
>>> noise_pred = model(noisy_image, timesteps).sample
>>> loss = F.mse_loss(noise_pred, noise)
```
## Train the model
By now, you have most of the pieces to start training the model and all that's left is putting everything together.
First, you'll need an optimizer and a learning rate scheduler:
```py
>>> from diffusers.optimization import get_cosine_schedule_with_warmup
>>> optimizer = torch.optim.AdamW(model.parameters(), lr=config.learning_rate)
>>> lr_scheduler = get_cosine_schedule_with_warmup(
... optimizer=optimizer,
... num_warmup_steps=config.lr_warmup_steps,
... num_training_steps=(len(train_dataloader) * config.num_epochs),
... )
```
Then, you'll need a way to evaluate the model. For evaluation, you can use the [`DDPMPipeline`] to generate a batch of sample images and save it as a grid:
```py
>>> from diffusers import DDPMPipeline
>>> import math
>>> import os
>>> def make_grid(images, rows, cols):
... w, h = images[0].size
... grid = Image.new("RGB", size=(cols * w, rows * h))
... for i, image in enumerate(images):
... grid.paste(image, box=(i % cols * w, i // cols * h))
... return grid
>>> def evaluate(config, epoch, pipeline):
... # Sample some images from random noise (this is the backward diffusion process).
... # The default pipeline output type is `List[PIL.Image]`
... images = pipeline(
... batch_size=config.eval_batch_size,
... generator=torch.manual_seed(config.seed),
... ).images
... # Make a grid out of the images
... image_grid = make_grid(images, rows=4, cols=4)
... # Save the images
... test_dir = os.path.join(config.output_dir, "samples")
... os.makedirs(test_dir, exist_ok=True)
... image_grid.save(f"{test_dir}/{epoch:04d}.png")
```
Now you can wrap all these components together in a training loop with 🤗 Accelerate for easy TensorBoard logging, gradient accumulation, and mixed precision training. To upload the model to the Hub, write a function to get your repository name and information and then push it to the Hub.
<Tip>
💡 The training loop below may look intimidating and long, but it'll be worth it later when you launch your training in just one line of code! If you can't wait and want to start generating images, feel free to copy and run the code below. You can always come back and examine the training loop more closely later, like when you're waiting for your model to finish training. 🤗
</Tip>
```py
>>> from accelerate import Accelerator
>>> from huggingface_hub import HfFolder, Repository, whoami
>>> from tqdm.auto import tqdm
>>> from pathlib import Path
>>> import os
>>> def get_full_repo_name(model_id: str, organization: str = None, token: str = None):
... if token is None:
... token = HfFolder.get_token()
... if organization is None:
... username = whoami(token)["name"]
... return f"{username}/{model_id}"
... else:
... return f"{organization}/{model_id}"
>>> def train_loop(config, model, noise_scheduler, optimizer, train_dataloader, lr_scheduler):
... # Initialize accelerator and tensorboard logging
... accelerator = Accelerator(
... mixed_precision=config.mixed_precision,
... gradient_accumulation_steps=config.gradient_accumulation_steps,
... log_with="tensorboard",
... project_dir=os.path.join(config.output_dir, "logs"),
... )
... if accelerator.is_main_process:
... if config.push_to_hub:
... repo_name = get_full_repo_name(Path(config.output_dir).name)
... repo = Repository(config.output_dir, clone_from=repo_name)
... elif config.output_dir is not None:
... os.makedirs(config.output_dir, exist_ok=True)
... accelerator.init_trackers("train_example")
... # Prepare everything
... # There is no specific order to remember, you just need to unpack the
... # objects in the same order you gave them to the prepare method.
... model, optimizer, train_dataloader, lr_scheduler = accelerator.prepare(
... model, optimizer, train_dataloader, lr_scheduler
... )
... global_step = 0
... # Now you train the model
... for epoch in range(config.num_epochs):
... progress_bar = tqdm(total=len(train_dataloader), disable=not accelerator.is_local_main_process)
... progress_bar.set_description(f"Epoch {epoch}")
... for step, batch in enumerate(train_dataloader):
... clean_images = batch["images"]
... # Sample noise to add to the images
... noise = torch.randn(clean_images.shape).to(clean_images.device)
... bs = clean_images.shape[0]
... # Sample a random timestep for each image
... timesteps = torch.randint(
... 0, noise_scheduler.config.num_train_timesteps, (bs,), device=clean_images.device
... ).long()
... # Add noise to the clean images according to the noise magnitude at each timestep
... # (this is the forward diffusion process)
... noisy_images = noise_scheduler.add_noise(clean_images, noise, timesteps)
... with accelerator.accumulate(model):
... # Predict the noise residual
... noise_pred = model(noisy_images, timesteps, return_dict=False)[0]
... loss = F.mse_loss(noise_pred, noise)
... accelerator.backward(loss)
... accelerator.clip_grad_norm_(model.parameters(), 1.0)
... optimizer.step()
... lr_scheduler.step()
... optimizer.zero_grad()
... progress_bar.update(1)
... logs = {"loss": loss.detach().item(), "lr": lr_scheduler.get_last_lr()[0], "step": global_step}
... progress_bar.set_postfix(**logs)
... accelerator.log(logs, step=global_step)
... global_step += 1
... # After each epoch you optionally sample some demo images with evaluate() and save the model
... if accelerator.is_main_process:
... pipeline = DDPMPipeline(unet=accelerator.unwrap_model(model), scheduler=noise_scheduler)
... if (epoch + 1) % config.save_image_epochs == 0 or epoch == config.num_epochs - 1:
... evaluate(config, epoch, pipeline)
... if (epoch + 1) % config.save_model_epochs == 0 or epoch == config.num_epochs - 1:
... if config.push_to_hub:
... repo.push_to_hub(commit_message=f"Epoch {epoch}", blocking=True)
... else:
... pipeline.save_pretrained(config.output_dir)
```
Phew, that was quite a bit of code! But you're finally ready to launch the training with 🤗 Accelerate's [`~accelerate.notebook_launcher`] function. Pass the function the training loop, all the training arguments, and the number of processes (you can change this value to the number of GPUs available to you) to use for training:
```py
>>> from accelerate import notebook_launcher
>>> args = (config, model, noise_scheduler, optimizer, train_dataloader, lr_scheduler)
>>> notebook_launcher(train_loop, args, num_processes=1)
```
Once training is complete, take a look at the final 🦋 images 🦋 generated by your diffusion model!
```py
>>> import glob
>>> sample_images = sorted(glob.glob(f"{config.output_dir}/samples/*.png"))
>>> Image.open(sample_images[-1])
```
<div class="flex justify-center">
<img src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/butterflies_final.png"/>
</div>
## Next steps
Unconditional image generation is one example of a task that can be trained. You can explore other tasks and training techniques by visiting the [🧨 Diffusers Training Examples](../training/overview) page. Here are some examples of what you can learn:
* [Textual Inversion](../training/text_inversion), an algorithm that teaches a model a specific visual concept and integrates it into the generated image.
* [DreamBooth](../training/dreambooth), a technique for generating personalized images of a subject given several input images of the subject.
* [Guide](../training/text2image) to finetuning a Stable Diffusion model on your own dataset.
* [Guide](../training/lora) to using LoRA, a memory-efficient technique for finetuning really large models faster.
| 0 |
hf_public_repos/diffusers/docs/source/en | hf_public_repos/diffusers/docs/source/en/tutorials/tutorial_overview.md | <!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# Overview
Welcome to 🧨 Diffusers! If you're new to diffusion models and generative AI, and want to learn more, then you've come to the right place. These beginner-friendly tutorials are designed to provide a gentle introduction to diffusion models and help you understand the library fundamentals - the core components and how 🧨 Diffusers is meant to be used.
You'll learn how to use a pipeline for inference to rapidly generate things, and then deconstruct that pipeline to really understand how to use the library as a modular toolbox for building your own diffusion systems. In the next lesson, you'll learn how to train your own diffusion model to generate what you want.
After completing the tutorials, you'll have gained the necessary skills to start exploring the library on your own and see how to use it for your own projects and applications.
Feel free to join our community on [Discord](https://discord.com/invite/JfAtkvEtRb) or the [forums](https://discuss.huggingface.co/c/discussion-related-to-httpsgithubcomhuggingfacediffusers/63) to connect and collaborate with other users and developers!
Let's start diffusing! 🧨 | 0 |
hf_public_repos/diffusers/docs/source/en | hf_public_repos/diffusers/docs/source/en/optimization/xformers.md | <!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# Installing xFormers
We recommend the use of [xFormers](https://github.com/facebookresearch/xformers) for both inference and training. In our tests, the optimizations performed in the attention blocks allow for both faster speed and reduced memory consumption.
Starting from version `0.0.16` of xFormers, released on January 2023, installation can be easily performed using pre-built pip wheels:
```bash
pip install xformers
```
<Tip>
The xFormers PIP package requires the latest version of PyTorch (1.13.1 as of xFormers 0.0.16). If you need to use a previous version of PyTorch, then we recommend you install xFormers from source using [the project instructions](https://github.com/facebookresearch/xformers#installing-xformers).
</Tip>
After xFormers is installed, you can use `enable_xformers_memory_efficient_attention()` for faster inference and reduced memory consumption, as discussed [here](fp16#memory-efficient-attention).
<Tip warning={true}>
According to [this issue](https://github.com/huggingface/diffusers/issues/2234#issuecomment-1416931212), xFormers `v0.0.16` cannot be used for training (fine-tune or Dreambooth) in some GPUs. If you observe that problem, please install a development version as indicated in that comment.
</Tip>
| 0 |
hf_public_repos/diffusers/docs/source/en | hf_public_repos/diffusers/docs/source/en/optimization/mps.md | <!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# How to use Stable Diffusion in Apple Silicon (M1/M2)
🤗 Diffusers is compatible with Apple silicon for Stable Diffusion inference, using the PyTorch `mps` device. These are the steps you need to follow to use your M1 or M2 computer with Stable Diffusion.
## Requirements
- Mac computer with Apple silicon (M1/M2) hardware.
- macOS 12.6 or later (13.0 or later recommended).
- arm64 version of Python.
- PyTorch 2.0 (recommended) or 1.13 (minimum version supported for `mps`). You can install it with `pip` or `conda` using the instructions in https://pytorch.org/get-started/locally/.
## Inference Pipeline
The snippet below demonstrates how to use the `mps` backend using the familiar `to()` interface to move the Stable Diffusion pipeline to your M1 or M2 device.
<Tip warning={true}>
**If you are using PyTorch 1.13** you need to "prime" the pipeline using an additional one-time pass through it. This is a temporary workaround for a weird issue we detected: the first inference pass produces slightly different results than subsequent ones. You only need to do this pass once, and it's ok to use just one inference step and discard the result.
</Tip>
We strongly recommend you use PyTorch 2 or better, as it solves a number of problems like the one described in the previous tip.
```python
from diffusers import DiffusionPipeline
pipe = DiffusionPipeline.from_pretrained("runwayml/stable-diffusion-v1-5")
pipe = pipe.to("mps")
# Recommended if your computer has < 64 GB of RAM
pipe.enable_attention_slicing()
prompt = "a photo of an astronaut riding a horse on mars"
# First-time "warmup" pass if PyTorch version is 1.13 (see explanation above)
_ = pipe(prompt, num_inference_steps=1)
# Results match those from the CPU device after the warmup pass.
image = pipe(prompt).images[0]
```
## Performance Recommendations
M1/M2 performance is very sensitive to memory pressure. The system will automatically swap if it needs to, but performance will degrade significantly when it does.
We recommend you use _attention slicing_ to reduce memory pressure during inference and prevent swapping, particularly if your computer has less than 64 GB of system RAM, or if you generate images at non-standard resolutions larger than 512 × 512 pixels. Attention slicing performs the costly attention operation in multiple steps instead of all at once. It usually has a performance impact of ~20% in computers without universal memory, but we have observed _better performance_ in most Apple Silicon computers, unless you have 64 GB or more.
```python
pipeline.enable_attention_slicing()
```
## Known Issues
- Generating multiple prompts in a batch [crashes or doesn't work reliably](https://github.com/huggingface/diffusers/issues/363). We believe this is related to the [`mps` backend in PyTorch](https://github.com/pytorch/pytorch/issues/84039). This is being resolved, but for now we recommend to iterate instead of batching.
| 0 |
hf_public_repos/diffusers/docs/source/en | hf_public_repos/diffusers/docs/source/en/optimization/tome.md | <!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# Token Merging
Token Merging (introduced in [Token Merging: Your ViT But Faster](https://arxiv.org/abs/2210.09461)) works by merging the redundant tokens / patches progressively in the forward pass of a Transformer-based network. It can speed up the inference latency of the underlying network.
After Token Merging (ToMe) was released, the authors released [Token Merging for Fast Stable Diffusion](https://arxiv.org/abs/2303.17604), which introduced a version of ToMe which is more compatible with Stable Diffusion. We can use ToMe to gracefully speed up the inference latency of a [`DiffusionPipeline`]. This doc discusses how to apply ToMe to the [`StableDiffusionPipeline`], the expected speedups, and the qualitative aspects of using ToMe on the [`StableDiffusionPipeline`].
## Using ToMe
The authors of ToMe released a convenient Python library called [`tomesd`](https://github.com/dbolya/tomesd) that lets us apply ToMe to a [`DiffusionPipeline`] like so:
```diff
from diffusers import StableDiffusionPipeline
import tomesd
pipeline = StableDiffusionPipeline.from_pretrained(
"runwayml/stable-diffusion-v1-5", torch_dtype=torch.float16
).to("cuda")
+ tomesd.apply_patch(pipeline, ratio=0.5)
image = pipeline("a photo of an astronaut riding a horse on mars").images[0]
```
And that’s it!
`tomesd.apply_patch()` exposes [a number of arguments](https://github.com/dbolya/tomesd#usage) to let us strike a balance between the pipeline inference speed and the quality of the generated tokens. Amongst those arguments, the most important one is `ratio`. `ratio` controls the number of tokens that will be merged during the forward pass. For more details on `tomesd`, please refer to the original repository https://github.com/dbolya/tomesd and [the paper](https://arxiv.org/abs/2303.17604).
## Benchmarking `tomesd` with `StableDiffusionPipeline`
We benchmarked the impact of using `tomesd` on [`StableDiffusionPipeline`] along with [xformers](https://huggingface.co/docs/diffusers/optimization/xformers) across different image resolutions. We used A100 and V100 as our test GPU devices with the following development environment (with Python 3.8.5):
```bash
- `diffusers` version: 0.15.1
- Python version: 3.8.16
- PyTorch version (GPU?): 1.13.1+cu116 (True)
- Huggingface_hub version: 0.13.2
- Transformers version: 4.27.2
- Accelerate version: 0.18.0
- xFormers version: 0.0.16
- tomesd version: 0.1.2
```
We used this script for benchmarking: [https://gist.github.com/sayakpaul/27aec6bca7eb7b0e0aa4112205850335](https://gist.github.com/sayakpaul/27aec6bca7eb7b0e0aa4112205850335). Following are our findings:
### A100
| Resolution | Batch size | Vanilla | ToMe | ToMe + xFormers | ToMe speedup (%) | ToMe + xFormers speedup (%) |
| --- | --- | --- | --- | --- | --- | --- |
| 512 | 10 | 6.88 | 5.26 | 4.69 | 23.54651163 | 31.83139535 |
| | | | | | | |
| 768 | 10 | OOM | 14.71 | 11 | | |
| | 8 | OOM | 11.56 | 8.84 | | |
| | 4 | OOM | 5.98 | 4.66 | | |
| | 2 | 4.99 | 3.24 | 3.1 | 35.07014028 | 37.8757515 |
| | 1 | 3.29 | 2.24 | 2.03 | 31.91489362 | 38.29787234 |
| | | | | | | |
| 1024 | 10 | OOM | OOM | OOM | | |
| | 8 | OOM | OOM | OOM | | |
| | 4 | OOM | 12.51 | 9.09 | | |
| | 2 | OOM | 6.52 | 4.96 | | |
| | 1 | 6.4 | 3.61 | 2.81 | 43.59375 | 56.09375 |
***The timings reported here are in seconds. Speedups are calculated over the `Vanilla` timings.***
### V100
| Resolution | Batch size | Vanilla | ToMe | ToMe + xFormers | ToMe speedup (%) | ToMe + xFormers speedup (%) |
| --- | --- | --- | --- | --- | --- | --- |
| 512 | 10 | OOM | 10.03 | 9.29 | | |
| | 8 | OOM | 8.05 | 7.47 | | |
| | 4 | 5.7 | 4.3 | 3.98 | 24.56140351 | 30.1754386 |
| | 2 | 3.14 | 2.43 | 2.27 | 22.61146497 | 27.70700637 |
| | 1 | 1.88 | 1.57 | 1.57 | 16.4893617 | 16.4893617 |
| | | | | | | |
| 768 | 10 | OOM | OOM | 23.67 | | |
| | 8 | OOM | OOM | 18.81 | | |
| | 4 | OOM | 11.81 | 9.7 | | |
| | 2 | OOM | 6.27 | 5.2 | | |
| | 1 | 5.43 | 3.38 | 2.82 | 37.75322284 | 48.06629834 |
| | | | | | | |
| 1024 | 10 | OOM | OOM | OOM | | |
| | 8 | OOM | OOM | OOM | | |
| | 4 | OOM | OOM | 19.35 | | |
| | 2 | OOM | 13 | 10.78 | | |
| | 1 | OOM | 6.66 | 5.54 | | |
As seen in the tables above, the speedup with `tomesd` becomes more pronounced for larger image resolutions. It is also interesting to note that with `tomesd`, it becomes possible to run the pipeline on a higher resolution, like 1024x1024.
It might be possible to speed up inference even further with [`torch.compile()`](https://huggingface.co/docs/diffusers/optimization/torch2.0).
## Quality
As reported in [the paper](https://arxiv.org/abs/2303.17604), ToMe can preserve the quality of the generated images to a great extent while speeding up inference. By increasing the `ratio`, it is possible to further speed up inference, but that might come at the cost of a deterioration in the image quality.
To test the quality of the generated samples using our setup, we sampled a few prompts from the “Parti Prompts” (introduced in [Parti](https://parti.research.google/)) and performed inference with the [`StableDiffusionPipeline`] in the following settings:
- Vanilla [`StableDiffusionPipeline`]
- [`StableDiffusionPipeline`] + ToMe
- [`StableDiffusionPipeline`] + ToMe + xformers
We didn’t notice any significant decrease in the quality of the generated samples. Here are samples:
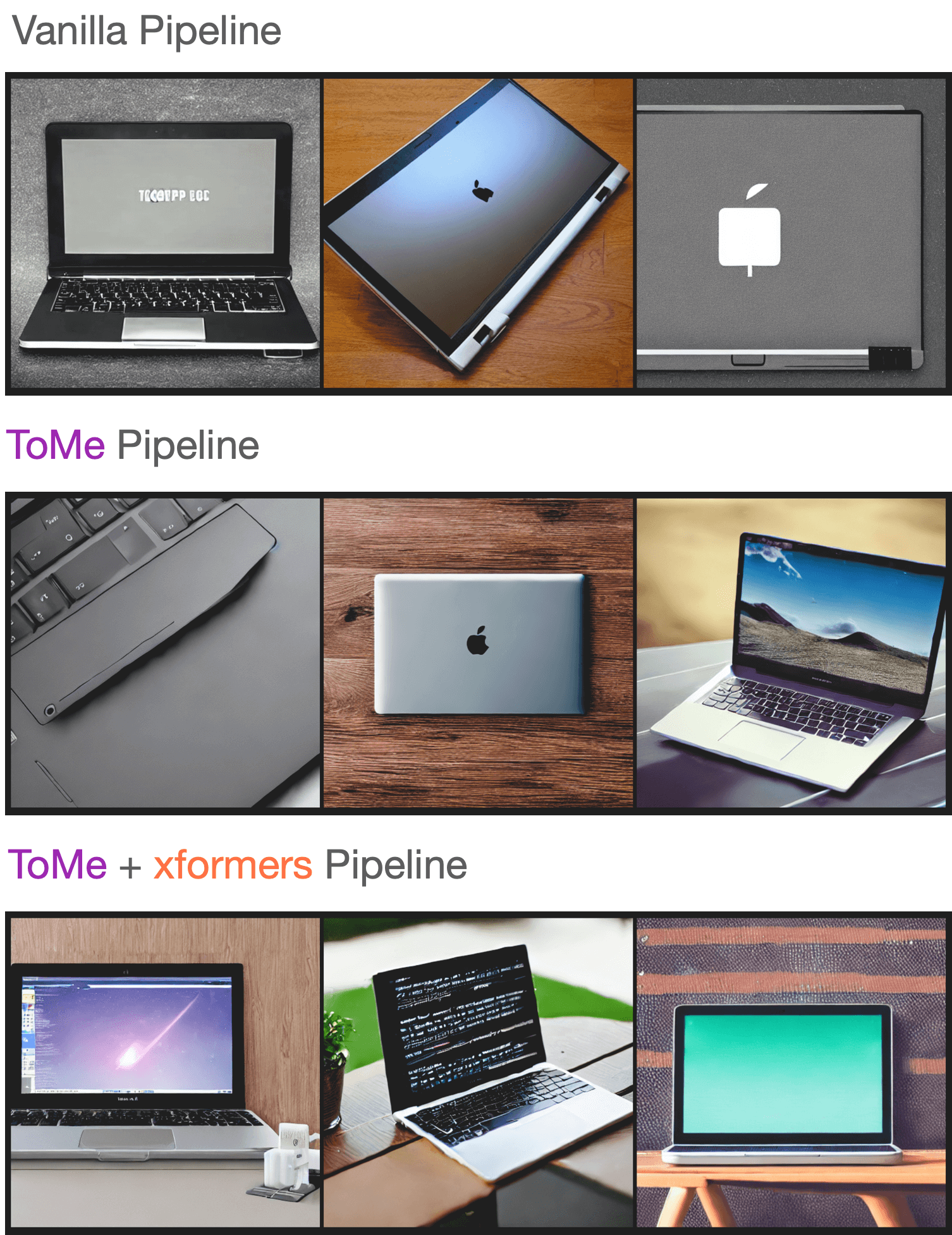
You can check out the generated samples [here](https://wandb.ai/sayakpaul/tomesd-results/runs/23j4bj3i?workspace=). We used [this script](https://gist.github.com/sayakpaul/8cac98d7f22399085a060992f411ecbd) for conducting this experiment. | 0 |
hf_public_repos/diffusers/docs/source/en | hf_public_repos/diffusers/docs/source/en/optimization/open_vino.md | <!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# How to use OpenVINO for inference
🤗 [Optimum](https://github.com/huggingface/optimum-intel) provides Stable Diffusion pipelines compatible with OpenVINO. You can now easily perform inference with OpenVINO Runtime on a variety of Intel processors ([see](https://docs.openvino.ai/latest/openvino_docs_OV_UG_supported_plugins_Supported_Devices.html) the full list of supported devices).
## Installation
Install 🤗 Optimum Intel with the following command:
```
pip install --upgrade-strategy eager optimum["openvino"]
```
The `--upgrade-strategy eager` option is needed to ensure [`optimum-intel`](https://github.com/huggingface/optimum-intel) is upgraded to its latest version.
## Stable Diffusion
### Inference
To load an OpenVINO model and run inference with OpenVINO Runtime, you need to replace `StableDiffusionPipeline` with `OVStableDiffusionPipeline`. In case you want to load a PyTorch model and convert it to the OpenVINO format on-the-fly, you can set `export=True`.
```python
from optimum.intel import OVStableDiffusionPipeline
model_id = "runwayml/stable-diffusion-v1-5"
pipeline = OVStableDiffusionPipeline.from_pretrained(model_id, export=True)
prompt = "sailing ship in storm by Rembrandt"
image = pipeline(prompt).images[0]
# Don't forget to save the exported model
pipeline.save_pretrained("openvino-sd-v1-5")
```
To further speed up inference, the model can be statically reshaped :
```python
# Define the shapes related to the inputs and desired outputs
batch_size, num_images, height, width = 1, 1, 512, 512
# Statically reshape the model
pipeline.reshape(batch_size, height, width, num_images)
# Compile the model before inference
pipeline.compile()
image = pipeline(
prompt,
height=height,
width=width,
num_images_per_prompt=num_images,
).images[0]
```
In case you want to change any parameters such as the outputs height or width, you’ll need to statically reshape your model once again.
<div class="flex justify-center">
<img src="https://huggingface.co/datasets/optimum/documentation-images/resolve/main/intel/openvino/stable_diffusion_v1_5_sail_boat_rembrandt.png">
</div>
### Supported tasks
| Task | Loading Class |
|--------------------------------------|--------------------------------------|
| `text-to-image` | `OVStableDiffusionPipeline` |
| `image-to-image` | `OVStableDiffusionImg2ImgPipeline` |
| `inpaint` | `OVStableDiffusionInpaintPipeline` |
You can find more examples in the optimum [documentation](https://huggingface.co/docs/optimum/intel/inference#stable-diffusion).
## Stable Diffusion XL
### Inference
```python
from optimum.intel import OVStableDiffusionXLPipeline
model_id = "stabilityai/stable-diffusion-xl-base-1.0"
pipeline = OVStableDiffusionXLPipeline.from_pretrained(model_id, export=True)
prompt = "sailing ship in storm by Rembrandt"
image = pipeline(prompt).images[0]
```
To further speed up inference, the model can be statically reshaped as showed above.
You can find more examples in the optimum [documentation](https://huggingface.co/docs/optimum/intel/inference#stable-diffusion-xl).
### Supported tasks
| Task | Loading Class |
|--------------------------------------|--------------------------------------|
| `text-to-image` | `OVStableDiffusionXLPipeline` |
| `image-to-image` | `OVStableDiffusionXLImg2ImgPipeline` |
| 0 |
hf_public_repos/diffusers/docs/source/en | hf_public_repos/diffusers/docs/source/en/optimization/onnx.md | <!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# How to use the ONNX Runtime for inference
🤗 [Optimum](https://github.com/huggingface/optimum) provides a Stable Diffusion pipeline compatible with ONNX Runtime.
## Installation
Install 🤗 Optimum with the following command for ONNX Runtime support:
```
pip install optimum["onnxruntime"]
```
## Stable Diffusion
### Inference
To load an ONNX model and run inference with the ONNX Runtime, you need to replace [`StableDiffusionPipeline`] with `ORTStableDiffusionPipeline`. In case you want to load a PyTorch model and convert it to the ONNX format on-the-fly, you can set `export=True`.
```python
from optimum.onnxruntime import ORTStableDiffusionPipeline
model_id = "runwayml/stable-diffusion-v1-5"
pipeline = ORTStableDiffusionPipeline.from_pretrained(model_id, export=True)
prompt = "sailing ship in storm by Leonardo da Vinci"
image = pipeline(prompt).images[0]
pipeline.save_pretrained("./onnx-stable-diffusion-v1-5")
```
If you want to export the pipeline in the ONNX format offline and later use it for inference,
you can use the [`optimum-cli export`](https://huggingface.co/docs/optimum/main/en/exporters/onnx/usage_guides/export_a_model#exporting-a-model-to-onnx-using-the-cli) command:
```bash
optimum-cli export onnx --model runwayml/stable-diffusion-v1-5 sd_v15_onnx/
```
Then perform inference:
```python
from optimum.onnxruntime import ORTStableDiffusionPipeline
model_id = "sd_v15_onnx"
pipeline = ORTStableDiffusionPipeline.from_pretrained(model_id)
prompt = "sailing ship in storm by Leonardo da Vinci"
image = pipeline(prompt).images[0]
```
Notice that we didn't have to specify `export=True` above.
<div class="flex justify-center">
<img src="https://huggingface.co/datasets/optimum/documentation-images/resolve/main/onnxruntime/stable_diffusion_v1_5_ort_sail_boat.png">
</div>
You can find more examples in [optimum documentation](https://huggingface.co/docs/optimum/).
### Supported tasks
| Task | Loading Class |
|--------------------------------------|--------------------------------------|
| `text-to-image` | `ORTStableDiffusionPipeline` |
| `image-to-image` | `ORTStableDiffusionImg2ImgPipeline` |
| `inpaint` | `ORTStableDiffusionInpaintPipeline` |
## Stable Diffusion XL
### Export
To export your model to ONNX, you can use the [Optimum CLI](https://huggingface.co/docs/optimum/main/en/exporters/onnx/usage_guides/export_a_model#exporting-a-model-to-onnx-using-the-cli) as follows :
```bash
optimum-cli export onnx --model stabilityai/stable-diffusion-xl-base-1.0 --task stable-diffusion-xl sd_xl_onnx/
```
### Inference
To load an ONNX model and run inference with ONNX Runtime, you need to replace `StableDiffusionPipelineXL` with `ORTStableDiffusionPipelineXL` :
```python
from optimum.onnxruntime import ORTStableDiffusionXLPipeline
pipeline = ORTStableDiffusionXLPipeline.from_pretrained("sd_xl_onnx")
prompt = "sailing ship in storm by Leonardo da Vinci"
image = pipeline(prompt).images[0]
```
### Supported tasks
| Task | Loading Class |
|--------------------------------------|--------------------------------------|
| `text-to-image` | `ORTStableDiffusionXLPipeline` |
| `image-to-image` | `ORTStableDiffusionXLImg2ImgPipeline`|
## Known Issues
- Generating multiple prompts in a batch seems to take too much memory. While we look into it, you may need to iterate instead of batching.
| 0 |
hf_public_repos/diffusers/docs/source/en | hf_public_repos/diffusers/docs/source/en/optimization/coreml.md | <!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# How to run Stable Diffusion with Core ML
[Core ML](https://developer.apple.com/documentation/coreml) is the model format and machine learning library supported by Apple frameworks. If you are interested in running Stable Diffusion models inside your macOS or iOS/iPadOS apps, this guide will show you how to convert existing PyTorch checkpoints into the Core ML format and use them for inference with Python or Swift.
Core ML models can leverage all the compute engines available in Apple devices: the CPU, the GPU, and the Apple Neural Engine (or ANE, a tensor-optimized accelerator available in Apple Silicon Macs and modern iPhones/iPads). Depending on the model and the device it's running on, Core ML can mix and match compute engines too, so some portions of the model may run on the CPU while others run on GPU, for example.
<Tip>
You can also run the `diffusers` Python codebase on Apple Silicon Macs using the `mps` accelerator built into PyTorch. This approach is explained in depth in [the mps guide](mps), but it is not compatible with native apps.
</Tip>
## Stable Diffusion Core ML Checkpoints
Stable Diffusion weights (or checkpoints) are stored in the PyTorch format, so you need to convert them to the Core ML format before we can use them inside native apps.
Thankfully, Apple engineers developed [a conversion tool](https://github.com/apple/ml-stable-diffusion#-converting-models-to-core-ml) based on `diffusers` to convert the PyTorch checkpoints to Core ML.
Before you convert a model, though, take a moment to explore the Hugging Face Hub – chances are the model you're interested in is already available in Core ML format:
- the [Apple](https://huggingface.co/apple) organization includes Stable Diffusion versions 1.4, 1.5, 2.0 base, and 2.1 base
- [coreml](https://huggingface.co/coreml) organization includes custom DreamBoothed and finetuned models
- use this [filter](https://huggingface.co/models?pipeline_tag=text-to-image&library=coreml&p=2&sort=likes) to return all available Core ML checkpoints
If you can't find the model you're interested in, we recommend you follow the instructions for [Converting Models to Core ML](https://github.com/apple/ml-stable-diffusion#-converting-models-to-core-ml) by Apple.
## Selecting the Core ML Variant to Use
Stable Diffusion models can be converted to different Core ML variants intended for different purposes:
- The type of attention blocks used. The attention operation is used to "pay attention" to the relationship between different areas in the image representations and to understand how the image and text representations are related. Attention is compute- and memory-intensive, so different implementations exist that consider the hardware characteristics of different devices. For Core ML Stable Diffusion models, there are two attention variants:
* `split_einsum` ([introduced by Apple](https://machinelearning.apple.com/research/neural-engine-transformers)) is optimized for ANE devices, which is available in modern iPhones, iPads and M-series computers.
* The "original" attention (the base implementation used in `diffusers`) is only compatible with CPU/GPU and not ANE. It can be *faster* to run your model on CPU + GPU using `original` attention than ANE. See [this performance benchmark](https://huggingface.co/blog/fast-mac-diffusers#performance-benchmarks) as well as some [additional measures provided by the community](https://github.com/huggingface/swift-coreml-diffusers/issues/31) for additional details.
- The supported inference framework.
* `packages` are suitable for Python inference. This can be used to test converted Core ML models before attempting to integrate them inside native apps, or if you want to explore Core ML performance but don't need to support native apps. For example, an application with a web UI could perfectly use a Python Core ML backend.
* `compiled` models are required for Swift code. The `compiled` models in the Hub split the large UNet model weights into several files for compatibility with iOS and iPadOS devices. This corresponds to the [`--chunk-unet` conversion option](https://github.com/apple/ml-stable-diffusion#-converting-models-to-core-ml). If you want to support native apps, then you need to select the `compiled` variant.
The official Core ML Stable Diffusion [models](https://huggingface.co/apple/coreml-stable-diffusion-v1-4/tree/main) include these variants, but the community ones may vary:
```
coreml-stable-diffusion-v1-4
├── README.md
├── original
│ ├── compiled
│ └── packages
└── split_einsum
├── compiled
└── packages
```
You can download and use the variant you need as shown below.
## Core ML Inference in Python
Install the following libraries to run Core ML inference in Python:
```bash
pip install huggingface_hub
pip install git+https://github.com/apple/ml-stable-diffusion
```
### Download the Model Checkpoints
To run inference in Python, use one of the versions stored in the `packages` folders because the `compiled` ones are only compatible with Swift. You may choose whether you want to use `original` or `split_einsum` attention.
This is how you'd download the `original` attention variant from the Hub to a directory called `models`:
```Python
from huggingface_hub import snapshot_download
from pathlib import Path
repo_id = "apple/coreml-stable-diffusion-v1-4"
variant = "original/packages"
model_path = Path("./models") / (repo_id.split("/")[-1] + "_" + variant.replace("/", "_"))
snapshot_download(repo_id, allow_patterns=f"{variant}/*", local_dir=model_path, local_dir_use_symlinks=False)
print(f"Model downloaded at {model_path}")
```
### Inference[[python-inference]]
Once you have downloaded a snapshot of the model, you can test it using Apple's Python script.
```shell
python -m python_coreml_stable_diffusion.pipeline --prompt "a photo of an astronaut riding a horse on mars" -i models/coreml-stable-diffusion-v1-4_original_packages -o </path/to/output/image> --compute-unit CPU_AND_GPU --seed 93
```
`<output-mlpackages-directory>` should point to the checkpoint you downloaded in the step above, and `--compute-unit` indicates the hardware you want to allow for inference. It must be one of the following options: `ALL`, `CPU_AND_GPU`, `CPU_ONLY`, `CPU_AND_NE`. You may also provide an optional output path, and a seed for reproducibility.
The inference script assumes you're using the original version of the Stable Diffusion model, `CompVis/stable-diffusion-v1-4`. If you use another model, you *have* to specify its Hub id in the inference command line, using the `--model-version` option. This works for models already supported and custom models you trained or fine-tuned yourself.
For example, if you want to use [`runwayml/stable-diffusion-v1-5`](https://huggingface.co/runwayml/stable-diffusion-v1-5):
```shell
python -m python_coreml_stable_diffusion.pipeline --prompt "a photo of an astronaut riding a horse on mars" --compute-unit ALL -o output --seed 93 -i models/coreml-stable-diffusion-v1-5_original_packages --model-version runwayml/stable-diffusion-v1-5
```
## Core ML inference in Swift
Running inference in Swift is slightly faster than in Python because the models are already compiled in the `mlmodelc` format. This is noticeable on app startup when the model is loaded but shouldn’t be noticeable if you run several generations afterward.
### Download
To run inference in Swift on your Mac, you need one of the `compiled` checkpoint versions. We recommend you download them locally using Python code similar to the previous example, but with one of the `compiled` variants:
```Python
from huggingface_hub import snapshot_download
from pathlib import Path
repo_id = "apple/coreml-stable-diffusion-v1-4"
variant = "original/compiled"
model_path = Path("./models") / (repo_id.split("/")[-1] + "_" + variant.replace("/", "_"))
snapshot_download(repo_id, allow_patterns=f"{variant}/*", local_dir=model_path, local_dir_use_symlinks=False)
print(f"Model downloaded at {model_path}")
```
### Inference[[swift-inference]]
To run inference, please clone Apple's repo:
```bash
git clone https://github.com/apple/ml-stable-diffusion
cd ml-stable-diffusion
```
And then use Apple's command line tool, [Swift Package Manager](https://www.swift.org/package-manager/#):
```bash
swift run StableDiffusionSample --resource-path models/coreml-stable-diffusion-v1-4_original_compiled --compute-units all "a photo of an astronaut riding a horse on mars"
```
You have to specify in `--resource-path` one of the checkpoints downloaded in the previous step, so please make sure it contains compiled Core ML bundles with the extension `.mlmodelc`. The `--compute-units` has to be one of these values: `all`, `cpuOnly`, `cpuAndGPU`, `cpuAndNeuralEngine`.
For more details, please refer to the [instructions in Apple's repo](https://github.com/apple/ml-stable-diffusion).
## Supported Diffusers Features
The Core ML models and inference code don't support many of the features, options, and flexibility of 🧨 Diffusers. These are some of the limitations to keep in mind:
- Core ML models are only suitable for inference. They can't be used for training or fine-tuning.
- Only two schedulers have been ported to Swift, the default one used by Stable Diffusion and `DPMSolverMultistepScheduler`, which we ported to Swift from our `diffusers` implementation. We recommend you use `DPMSolverMultistepScheduler`, since it produces the same quality in about half the steps.
- Negative prompts, classifier-free guidance scale, and image-to-image tasks are available in the inference code. Advanced features such as depth guidance, ControlNet, and latent upscalers are not available yet.
Apple's [conversion and inference repo](https://github.com/apple/ml-stable-diffusion) and our own [swift-coreml-diffusers](https://github.com/huggingface/swift-coreml-diffusers) repos are intended as technology demonstrators to enable other developers to build upon.
If you feel strongly about any missing features, please feel free to open a feature request or, better yet, a contribution PR :)
## Native Diffusers Swift app
One easy way to run Stable Diffusion on your own Apple hardware is to use [our open-source Swift repo](https://github.com/huggingface/swift-coreml-diffusers), based on `diffusers` and Apple's conversion and inference repo. You can study the code, compile it with [Xcode](https://developer.apple.com/xcode/) and adapt it for your own needs. For your convenience, there's also a [standalone Mac app in the App Store](https://apps.apple.com/app/diffusers/id1666309574), so you can play with it without having to deal with the code or IDE. If you are a developer and have determined that Core ML is the best solution to build your Stable Diffusion app, then you can use the rest of this guide to get started with your project. We can't wait to see what you'll build :)
| 0 |
hf_public_repos/diffusers/docs/source/en | hf_public_repos/diffusers/docs/source/en/optimization/torch2.0.md | <!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# Accelerated PyTorch 2.0 support in Diffusers
Starting from version `0.13.0`, Diffusers supports the latest optimization from [PyTorch 2.0](https://pytorch.org/get-started/pytorch-2.0/). These include:
1. Support for accelerated transformers implementation with memory-efficient attention – no extra dependencies (such as `xformers`) required.
2. [torch.compile](https://pytorch.org/tutorials/intermediate/torch_compile_tutorial.html) support for extra performance boost when individual models are compiled.
## Installation
To benefit from the accelerated attention implementation and `torch.compile()`, you just need to install the latest versions of PyTorch 2.0 from pip, and make sure you are on diffusers 0.13.0 or later. As explained below, diffusers automatically uses the optimized attention processor ([`AttnProcessor2_0`](https://github.com/huggingface/diffusers/blob/1a5797c6d4491a879ea5285c4efc377664e0332d/src/diffusers/models/attention_processor.py#L798)) (but not `torch.compile()`)
when PyTorch 2.0 is available.
```bash
pip install --upgrade torch diffusers
```
## Using accelerated transformers and `torch.compile`.
1. **Accelerated Transformers implementation**
PyTorch 2.0 includes an optimized and memory-efficient attention implementation through the [`torch.nn.functional.scaled_dot_product_attention`](https://pytorch.org/docs/master/generated/torch.nn.functional.scaled_dot_product_attention) function, which automatically enables several optimizations depending on the inputs and the GPU type. This is similar to the `memory_efficient_attention` from [xFormers](https://github.com/facebookresearch/xformers), but built natively into PyTorch.
These optimizations will be enabled by default in Diffusers if PyTorch 2.0 is installed and if `torch.nn.functional.scaled_dot_product_attention` is available. To use it, just install `torch 2.0` as suggested above and simply use the pipeline. For example:
```Python
import torch
from diffusers import DiffusionPipeline
pipe = DiffusionPipeline.from_pretrained("runwayml/stable-diffusion-v1-5", torch_dtype=torch.float16)
pipe = pipe.to("cuda")
prompt = "a photo of an astronaut riding a horse on mars"
image = pipe(prompt).images[0]
```
If you want to enable it explicitly (which is not required), you can do so as shown below.
```diff
import torch
from diffusers import DiffusionPipeline
+ from diffusers.models.attention_processor import AttnProcessor2_0
pipe = DiffusionPipeline.from_pretrained("runwayml/stable-diffusion-v1-5", torch_dtype=torch.float16).to("cuda")
+ pipe.unet.set_attn_processor(AttnProcessor2_0())
prompt = "a photo of an astronaut riding a horse on mars"
image = pipe(prompt).images[0]
```
This should be as fast and memory efficient as `xFormers`. More details [in our benchmark](#benchmark).
It is possible to revert to the vanilla attention processor ([`AttnProcessor`](https://github.com/huggingface/diffusers/blob/1a5797c6d4491a879ea5285c4efc377664e0332d/src/diffusers/models/attention_processor.py#L402)), which can be helpful to make the pipeline more deterministic, or if you need to convert a fine-tuned model to other formats such as [Core ML](https://huggingface.co/docs/diffusers/v0.16.0/en/optimization/coreml#how-to-run-stable-diffusion-with-core-ml). To use the normal attention processor you can use the [`~diffusers.UNet2DConditionModel.set_default_attn_processor`] function:
```Python
import torch
from diffusers import DiffusionPipeline
from diffusers.models.attention_processor import AttnProcessor
pipe = DiffusionPipeline.from_pretrained("runwayml/stable-diffusion-v1-5", torch_dtype=torch.float16).to("cuda")
pipe.unet.set_default_attn_processor()
prompt = "a photo of an astronaut riding a horse on mars"
image = pipe(prompt).images[0]
```
2. **torch.compile**
To get an additional speedup, we can use the new `torch.compile` feature. Since the UNet of the pipeline is usually the most computationally expensive, we wrap the `unet` with `torch.compile` leaving rest of the sub-models (text encoder and VAE) as is. For more information and different options, refer to the
[torch compile docs](https://pytorch.org/tutorials/intermediate/torch_compile_tutorial.html).
```python
pipe.unet = torch.compile(pipe.unet, mode="reduce-overhead", fullgraph=True)
images = pipe(prompt, num_inference_steps=steps, num_images_per_prompt=batch_size).images
```
Depending on the type of GPU, `compile()` can yield between **5% - 300%** of _additional speed-up_ over the accelerated transformer optimizations. Note, however, that compilation is able to squeeze more performance improvements in more recent GPU architectures such as Ampere (A100, 3090), Ada (4090) and Hopper (H100).
Compilation takes some time to complete, so it is best suited for situations where you need to prepare your pipeline once and then perform the same type of inference operations multiple times. Calling the compiled pipeline on a different image size will re-trigger compilation which can be expensive.
## Benchmark
We conducted a comprehensive benchmark with PyTorch 2.0's efficient attention implementation and `torch.compile` across different GPUs and batch sizes for five of our most used pipelines. We used `diffusers 0.17.0.dev0`, which [makes sure `torch.compile()` is leveraged optimally](https://github.com/huggingface/diffusers/pull/3313).
### Benchmarking code
#### Stable Diffusion text-to-image
```python
from diffusers import DiffusionPipeline
import torch
path = "runwayml/stable-diffusion-v1-5"
run_compile = True # Set True / False
pipe = DiffusionPipeline.from_pretrained(path, torch_dtype=torch.float16)
pipe = pipe.to("cuda")
pipe.unet.to(memory_format=torch.channels_last)
if run_compile:
print("Run torch compile")
pipe.unet = torch.compile(pipe.unet, mode="reduce-overhead", fullgraph=True)
prompt = "ghibli style, a fantasy landscape with castles"
for _ in range(3):
images = pipe(prompt=prompt).images
```
#### Stable Diffusion image-to-image
```python
from diffusers import StableDiffusionImg2ImgPipeline
import requests
import torch
from PIL import Image
from io import BytesIO
url = "https://raw.githubusercontent.com/CompVis/stable-diffusion/main/assets/stable-samples/img2img/sketch-mountains-input.jpg"
response = requests.get(url)
init_image = Image.open(BytesIO(response.content)).convert("RGB")
init_image = init_image.resize((512, 512))
path = "runwayml/stable-diffusion-v1-5"
run_compile = True # Set True / False
pipe = StableDiffusionImg2ImgPipeline.from_pretrained(path, torch_dtype=torch.float16)
pipe = pipe.to("cuda")
pipe.unet.to(memory_format=torch.channels_last)
if run_compile:
print("Run torch compile")
pipe.unet = torch.compile(pipe.unet, mode="reduce-overhead", fullgraph=True)
prompt = "ghibli style, a fantasy landscape with castles"
for _ in range(3):
image = pipe(prompt=prompt, image=init_image).images[0]
```
#### Stable Diffusion - inpainting
```python
from diffusers import StableDiffusionInpaintPipeline
import requests
import torch
from PIL import Image
from io import BytesIO
url = "https://raw.githubusercontent.com/CompVis/stable-diffusion/main/assets/stable-samples/img2img/sketch-mountains-input.jpg"
def download_image(url):
response = requests.get(url)
return Image.open(BytesIO(response.content)).convert("RGB")
img_url = "https://raw.githubusercontent.com/CompVis/latent-diffusion/main/data/inpainting_examples/overture-creations-5sI6fQgYIuo.png"
mask_url = "https://raw.githubusercontent.com/CompVis/latent-diffusion/main/data/inpainting_examples/overture-creations-5sI6fQgYIuo_mask.png"
init_image = download_image(img_url).resize((512, 512))
mask_image = download_image(mask_url).resize((512, 512))
path = "runwayml/stable-diffusion-inpainting"
run_compile = True # Set True / False
pipe = StableDiffusionInpaintPipeline.from_pretrained(path, torch_dtype=torch.float16)
pipe = pipe.to("cuda")
pipe.unet.to(memory_format=torch.channels_last)
if run_compile:
print("Run torch compile")
pipe.unet = torch.compile(pipe.unet, mode="reduce-overhead", fullgraph=True)
prompt = "ghibli style, a fantasy landscape with castles"
for _ in range(3):
image = pipe(prompt=prompt, image=init_image, mask_image=mask_image).images[0]
```
#### ControlNet
```python
from diffusers import StableDiffusionControlNetPipeline, ControlNetModel
import requests
import torch
from PIL import Image
from io import BytesIO
url = "https://raw.githubusercontent.com/CompVis/stable-diffusion/main/assets/stable-samples/img2img/sketch-mountains-input.jpg"
response = requests.get(url)
init_image = Image.open(BytesIO(response.content)).convert("RGB")
init_image = init_image.resize((512, 512))
path = "runwayml/stable-diffusion-v1-5"
run_compile = True # Set True / False
controlnet = ControlNetModel.from_pretrained("lllyasviel/sd-controlnet-canny", torch_dtype=torch.float16)
pipe = StableDiffusionControlNetPipeline.from_pretrained(
path, controlnet=controlnet, torch_dtype=torch.float16
)
pipe = pipe.to("cuda")
pipe.unet.to(memory_format=torch.channels_last)
pipe.controlnet.to(memory_format=torch.channels_last)
if run_compile:
print("Run torch compile")
pipe.unet = torch.compile(pipe.unet, mode="reduce-overhead", fullgraph=True)
pipe.controlnet = torch.compile(pipe.controlnet, mode="reduce-overhead", fullgraph=True)
prompt = "ghibli style, a fantasy landscape with castles"
for _ in range(3):
image = pipe(prompt=prompt, image=init_image).images[0]
```
#### IF text-to-image + upscaling
```python
from diffusers import DiffusionPipeline
import torch
run_compile = True # Set True / False
pipe = DiffusionPipeline.from_pretrained("DeepFloyd/IF-I-M-v1.0", variant="fp16", text_encoder=None, torch_dtype=torch.float16)
pipe.to("cuda")
pipe_2 = DiffusionPipeline.from_pretrained("DeepFloyd/IF-II-M-v1.0", variant="fp16", text_encoder=None, torch_dtype=torch.float16)
pipe_2.to("cuda")
pipe_3 = DiffusionPipeline.from_pretrained("stabilityai/stable-diffusion-x4-upscaler", torch_dtype=torch.float16)
pipe_3.to("cuda")
pipe.unet.to(memory_format=torch.channels_last)
pipe_2.unet.to(memory_format=torch.channels_last)
pipe_3.unet.to(memory_format=torch.channels_last)
if run_compile:
pipe.unet = torch.compile(pipe.unet, mode="reduce-overhead", fullgraph=True)
pipe_2.unet = torch.compile(pipe_2.unet, mode="reduce-overhead", fullgraph=True)
pipe_3.unet = torch.compile(pipe_3.unet, mode="reduce-overhead", fullgraph=True)
prompt = "the blue hulk"
prompt_embeds = torch.randn((1, 2, 4096), dtype=torch.float16)
neg_prompt_embeds = torch.randn((1, 2, 4096), dtype=torch.float16)
for _ in range(3):
image = pipe(prompt_embeds=prompt_embeds, negative_prompt_embeds=neg_prompt_embeds, output_type="pt").images
image_2 = pipe_2(image=image, prompt_embeds=prompt_embeds, negative_prompt_embeds=neg_prompt_embeds, output_type="pt").images
image_3 = pipe_3(prompt=prompt, image=image, noise_level=100).images
```
To give you a pictorial overview of the possible speed-ups that can be obtained with PyTorch 2.0 and `torch.compile()`,
here is a plot that shows relative speed-ups for the [Stable Diffusion text-to-image pipeline](StableDiffusionPipeline) across five
different GPU families (with a batch size of 4):
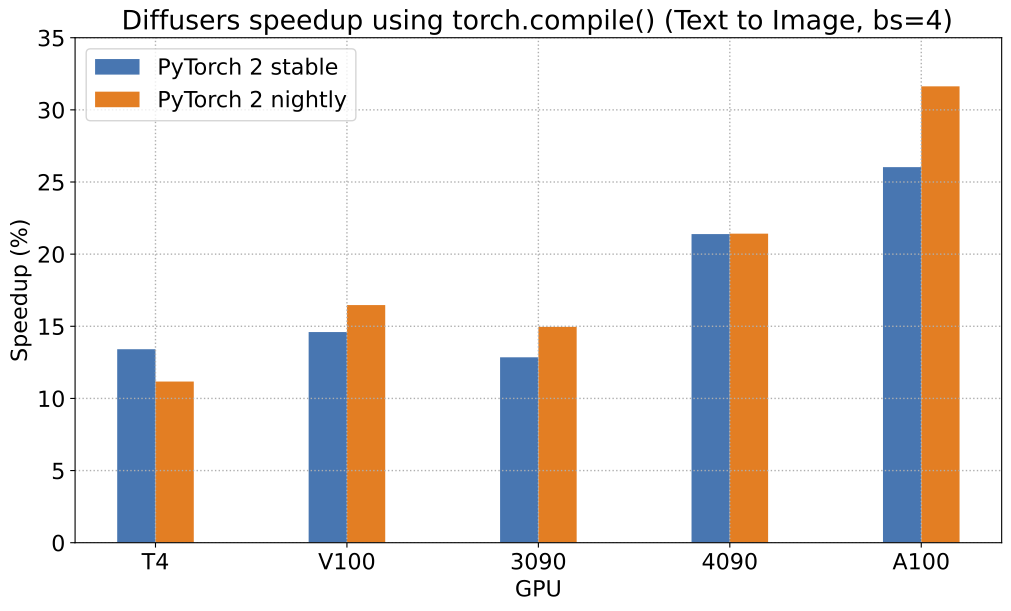
To give you an even better idea of how this speed-up holds for the other pipelines presented above, consider the following
plot that shows the benchmarking numbers from an A100 across three different batch sizes
(with PyTorch 2.0 nightly and `torch.compile()`):
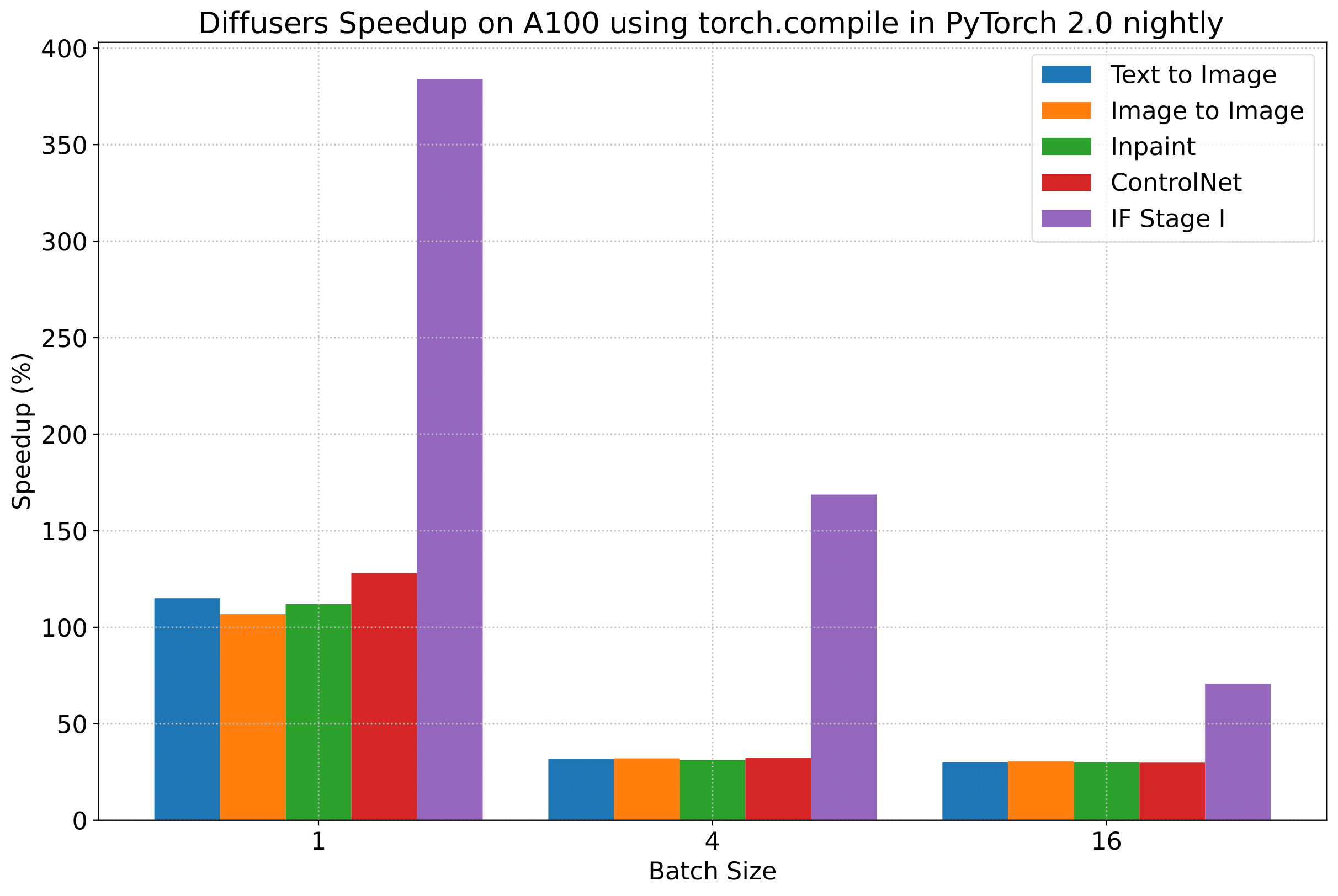
_(Our benchmarking metric for the plots above is **number of iterations/second**)_
But we reveal all the benchmarking numbers in the interest of transparency!
In the following tables, we report our findings in terms of the number of **_iterations processed per second_**.
### A100 (batch size: 1)
| **Pipeline** | **torch 2.0 - <br>no compile** | **torch nightly - <br>no compile** | **torch 2.0 - <br>compile** | **torch nightly - <br>compile** |
|:---:|:---:|:---:|:---:|:---:|
| SD - txt2img | 21.66 | 23.13 | 44.03 | 49.74 |
| SD - img2img | 21.81 | 22.40 | 43.92 | 46.32 |
| SD - inpaint | 22.24 | 23.23 | 43.76 | 49.25 |
| SD - controlnet | 15.02 | 15.82 | 32.13 | 36.08 |
| IF | 20.21 / <br>13.84 / <br>24.00 | 20.12 / <br>13.70 / <br>24.03 | ❌ | 97.34 / <br>27.23 / <br>111.66 |
### A100 (batch size: 4)
| **Pipeline** | **torch 2.0 - <br>no compile** | **torch nightly - <br>no compile** | **torch 2.0 - <br>compile** | **torch nightly - <br>compile** |
|:---:|:---:|:---:|:---:|:---:|
| SD - txt2img | 11.6 | 13.12 | 14.62 | 17.27 |
| SD - img2img | 11.47 | 13.06 | 14.66 | 17.25 |
| SD - inpaint | 11.67 | 13.31 | 14.88 | 17.48 |
| SD - controlnet | 8.28 | 9.38 | 10.51 | 12.41 |
| IF | 25.02 | 18.04 | ❌ | 48.47 |
### A100 (batch size: 16)
| **Pipeline** | **torch 2.0 - <br>no compile** | **torch nightly - <br>no compile** | **torch 2.0 - <br>compile** | **torch nightly - <br>compile** |
|:---:|:---:|:---:|:---:|:---:|
| SD - txt2img | 3.04 | 3.6 | 3.83 | 4.68 |
| SD - img2img | 2.98 | 3.58 | 3.83 | 4.67 |
| SD - inpaint | 3.04 | 3.66 | 3.9 | 4.76 |
| SD - controlnet | 2.15 | 2.58 | 2.74 | 3.35 |
| IF | 8.78 | 9.82 | ❌ | 16.77 |
### V100 (batch size: 1)
| **Pipeline** | **torch 2.0 - <br>no compile** | **torch nightly - <br>no compile** | **torch 2.0 - <br>compile** | **torch nightly - <br>compile** |
|:---:|:---:|:---:|:---:|:---:|
| SD - txt2img | 18.99 | 19.14 | 20.95 | 22.17 |
| SD - img2img | 18.56 | 19.18 | 20.95 | 22.11 |
| SD - inpaint | 19.14 | 19.06 | 21.08 | 22.20 |
| SD - controlnet | 13.48 | 13.93 | 15.18 | 15.88 |
| IF | 20.01 / <br>9.08 / <br>23.34 | 19.79 / <br>8.98 / <br>24.10 | ❌ | 55.75 / <br>11.57 / <br>57.67 |
### V100 (batch size: 4)
| **Pipeline** | **torch 2.0 - <br>no compile** | **torch nightly - <br>no compile** | **torch 2.0 - <br>compile** | **torch nightly - <br>compile** |
|:---:|:---:|:---:|:---:|:---:|
| SD - txt2img | 5.96 | 5.89 | 6.83 | 6.86 |
| SD - img2img | 5.90 | 5.91 | 6.81 | 6.82 |
| SD - inpaint | 5.99 | 6.03 | 6.93 | 6.95 |
| SD - controlnet | 4.26 | 4.29 | 4.92 | 4.93 |
| IF | 15.41 | 14.76 | ❌ | 22.95 |
### V100 (batch size: 16)
| **Pipeline** | **torch 2.0 - <br>no compile** | **torch nightly - <br>no compile** | **torch 2.0 - <br>compile** | **torch nightly - <br>compile** |
|:---:|:---:|:---:|:---:|:---:|
| SD - txt2img | 1.66 | 1.66 | 1.92 | 1.90 |
| SD - img2img | 1.65 | 1.65 | 1.91 | 1.89 |
| SD - inpaint | 1.69 | 1.69 | 1.95 | 1.93 |
| SD - controlnet | 1.19 | 1.19 | OOM after warmup | 1.36 |
| IF | 5.43 | 5.29 | ❌ | 7.06 |
### T4 (batch size: 1)
| **Pipeline** | **torch 2.0 - <br>no compile** | **torch nightly - <br>no compile** | **torch 2.0 - <br>compile** | **torch nightly - <br>compile** |
|:---:|:---:|:---:|:---:|:---:|
| SD - txt2img | 6.9 | 6.95 | 7.3 | 7.56 |
| SD - img2img | 6.84 | 6.99 | 7.04 | 7.55 |
| SD - inpaint | 6.91 | 6.7 | 7.01 | 7.37 |
| SD - controlnet | 4.89 | 4.86 | 5.35 | 5.48 |
| IF | 17.42 / <br>2.47 / <br>18.52 | 16.96 / <br>2.45 / <br>18.69 | ❌ | 24.63 / <br>2.47 / <br>23.39 |
### T4 (batch size: 4)
| **Pipeline** | **torch 2.0 - <br>no compile** | **torch nightly - <br>no compile** | **torch 2.0 - <br>compile** | **torch nightly - <br>compile** |
|:---:|:---:|:---:|:---:|:---:|
| SD - txt2img | 1.79 | 1.79 | 2.03 | 1.99 |
| SD - img2img | 1.77 | 1.77 | 2.05 | 2.04 |
| SD - inpaint | 1.81 | 1.82 | 2.09 | 2.09 |
| SD - controlnet | 1.34 | 1.27 | 1.47 | 1.46 |
| IF | 5.79 | 5.61 | ❌ | 7.39 |
### T4 (batch size: 16)
| **Pipeline** | **torch 2.0 - <br>no compile** | **torch nightly - <br>no compile** | **torch 2.0 - <br>compile** | **torch nightly - <br>compile** |
|:---:|:---:|:---:|:---:|:---:|
| SD - txt2img | 2.34s | 2.30s | OOM after 2nd iteration | 1.99s |
| SD - img2img | 2.35s | 2.31s | OOM after warmup | 2.00s |
| SD - inpaint | 2.30s | 2.26s | OOM after 2nd iteration | 1.95s |
| SD - controlnet | OOM after 2nd iteration | OOM after 2nd iteration | OOM after warmup | OOM after warmup |
| IF * | 1.44 | 1.44 | ❌ | 1.94 |
### RTX 3090 (batch size: 1)
| **Pipeline** | **torch 2.0 - <br>no compile** | **torch nightly - <br>no compile** | **torch 2.0 - <br>compile** | **torch nightly - <br>compile** |
|:---:|:---:|:---:|:---:|:---:|
| SD - txt2img | 22.56 | 22.84 | 23.84 | 25.69 |
| SD - img2img | 22.25 | 22.61 | 24.1 | 25.83 |
| SD - inpaint | 22.22 | 22.54 | 24.26 | 26.02 |
| SD - controlnet | 16.03 | 16.33 | 17.38 | 18.56 |
| IF | 27.08 / <br>9.07 / <br>31.23 | 26.75 / <br>8.92 / <br>31.47 | ❌ | 68.08 / <br>11.16 / <br>65.29 |
### RTX 3090 (batch size: 4)
| **Pipeline** | **torch 2.0 - <br>no compile** | **torch nightly - <br>no compile** | **torch 2.0 - <br>compile** | **torch nightly - <br>compile** |
|:---:|:---:|:---:|:---:|:---:|
| SD - txt2img | 6.46 | 6.35 | 7.29 | 7.3 |
| SD - img2img | 6.33 | 6.27 | 7.31 | 7.26 |
| SD - inpaint | 6.47 | 6.4 | 7.44 | 7.39 |
| SD - controlnet | 4.59 | 4.54 | 5.27 | 5.26 |
| IF | 16.81 | 16.62 | ❌ | 21.57 |
### RTX 3090 (batch size: 16)
| **Pipeline** | **torch 2.0 - <br>no compile** | **torch nightly - <br>no compile** | **torch 2.0 - <br>compile** | **torch nightly - <br>compile** |
|:---:|:---:|:---:|:---:|:---:|
| SD - txt2img | 1.7 | 1.69 | 1.93 | 1.91 |
| SD - img2img | 1.68 | 1.67 | 1.93 | 1.9 |
| SD - inpaint | 1.72 | 1.71 | 1.97 | 1.94 |
| SD - controlnet | 1.23 | 1.22 | 1.4 | 1.38 |
| IF | 5.01 | 5.00 | ❌ | 6.33 |
### RTX 4090 (batch size: 1)
| **Pipeline** | **torch 2.0 - <br>no compile** | **torch nightly - <br>no compile** | **torch 2.0 - <br>compile** | **torch nightly - <br>compile** |
|:---:|:---:|:---:|:---:|:---:|
| SD - txt2img | 40.5 | 41.89 | 44.65 | 49.81 |
| SD - img2img | 40.39 | 41.95 | 44.46 | 49.8 |
| SD - inpaint | 40.51 | 41.88 | 44.58 | 49.72 |
| SD - controlnet | 29.27 | 30.29 | 32.26 | 36.03 |
| IF | 69.71 / <br>18.78 / <br>85.49 | 69.13 / <br>18.80 / <br>85.56 | ❌ | 124.60 / <br>26.37 / <br>138.79 |
### RTX 4090 (batch size: 4)
| **Pipeline** | **torch 2.0 - <br>no compile** | **torch nightly - <br>no compile** | **torch 2.0 - <br>compile** | **torch nightly - <br>compile** |
|:---:|:---:|:---:|:---:|:---:|
| SD - txt2img | 12.62 | 12.84 | 15.32 | 15.59 |
| SD - img2img | 12.61 | 12,.79 | 15.35 | 15.66 |
| SD - inpaint | 12.65 | 12.81 | 15.3 | 15.58 |
| SD - controlnet | 9.1 | 9.25 | 11.03 | 11.22 |
| IF | 31.88 | 31.14 | ❌ | 43.92 |
### RTX 4090 (batch size: 16)
| **Pipeline** | **torch 2.0 - <br>no compile** | **torch nightly - <br>no compile** | **torch 2.0 - <br>compile** | **torch nightly - <br>compile** |
|:---:|:---:|:---:|:---:|:---:|
| SD - txt2img | 3.17 | 3.2 | 3.84 | 3.85 |
| SD - img2img | 3.16 | 3.2 | 3.84 | 3.85 |
| SD - inpaint | 3.17 | 3.2 | 3.85 | 3.85 |
| SD - controlnet | 2.23 | 2.3 | 2.7 | 2.75 |
| IF | 9.26 | 9.2 | ❌ | 13.31 |
## Notes
* Follow [this PR](https://github.com/huggingface/diffusers/pull/3313) for more details on the environment used for conducting the benchmarks.
* For the IF pipeline and batch sizes > 1, we only used a batch size of >1 in the first IF pipeline for text-to-image generation and NOT for upscaling. So, that means the two upscaling pipelines received a batch size of 1.
*Thanks to [Horace He](https://github.com/Chillee) from the PyTorch team for their support in improving our support of `torch.compile()` in Diffusers.* | 0 |
hf_public_repos/diffusers/docs/source/en | hf_public_repos/diffusers/docs/source/en/optimization/opt_overview.md | <!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# Overview
Generating high-quality outputs is computationally intensive, especially during each iterative step where you go from a noisy output to a less noisy output. One of 🧨 Diffuser's goal is to make this technology widely accessible to everyone, which includes enabling fast inference on consumer and specialized hardware.
This section will cover tips and tricks - like half-precision weights and sliced attention - for optimizing inference speed and reducing memory-consumption. You can also learn how to speed up your PyTorch code with [`torch.compile`](https://pytorch.org/tutorials/intermediate/torch_compile_tutorial.html) or [ONNX Runtime](https://onnxruntime.ai/docs/), and enable memory-efficient attention with [xFormers](https://facebookresearch.github.io/xformers/). There are also guides for running inference on specific hardware like Apple Silicon, and Intel or Habana processors. | 0 |
hf_public_repos/diffusers/docs/source/en | hf_public_repos/diffusers/docs/source/en/optimization/habana.md | <!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# How to use Stable Diffusion on Habana Gaudi
🤗 Diffusers is compatible with Habana Gaudi through 🤗 [Optimum Habana](https://huggingface.co/docs/optimum/habana/usage_guides/stable_diffusion).
## Requirements
- Optimum Habana 1.6 or later, [here](https://huggingface.co/docs/optimum/habana/installation) is how to install it.
- SynapseAI 1.10.
## Inference Pipeline
To generate images with Stable Diffusion 1 and 2 on Gaudi, you need to instantiate two instances:
- A pipeline with [`GaudiStableDiffusionPipeline`](https://huggingface.co/docs/optimum/habana/package_reference/stable_diffusion_pipeline). This pipeline supports *text-to-image generation*.
- A scheduler with [`GaudiDDIMScheduler`](https://huggingface.co/docs/optimum/habana/package_reference/stable_diffusion_pipeline#optimum.habana.diffusers.GaudiDDIMScheduler). This scheduler has been optimized for Habana Gaudi.
When initializing the pipeline, you have to specify `use_habana=True` to deploy it on HPUs.
Furthermore, in order to get the fastest possible generations you should enable **HPU graphs** with `use_hpu_graphs=True`.
Finally, you will need to specify a [Gaudi configuration](https://huggingface.co/docs/optimum/habana/package_reference/gaudi_config) which can be downloaded from the [Hugging Face Hub](https://huggingface.co/Habana).
```python
from optimum.habana import GaudiConfig
from optimum.habana.diffusers import GaudiDDIMScheduler, GaudiStableDiffusionPipeline
model_name = "stabilityai/stable-diffusion-2-base"
scheduler = GaudiDDIMScheduler.from_pretrained(model_name, subfolder="scheduler")
pipeline = GaudiStableDiffusionPipeline.from_pretrained(
model_name,
scheduler=scheduler,
use_habana=True,
use_hpu_graphs=True,
gaudi_config="Habana/stable-diffusion-2",
)
```
You can then call the pipeline to generate images by batches from one or several prompts:
```python
outputs = pipeline(
prompt=[
"High quality photo of an astronaut riding a horse in space",
"Face of a yellow cat, high resolution, sitting on a park bench",
],
num_images_per_prompt=10,
batch_size=4,
)
```
For more information, check out Optimum Habana's [documentation](https://huggingface.co/docs/optimum/habana/usage_guides/stable_diffusion) and the [example](https://github.com/huggingface/optimum-habana/tree/main/examples/stable-diffusion) provided in the official Github repository.
## Benchmark
Here are the latencies for Habana first-generation Gaudi and Gaudi2 with the [Habana/stable-diffusion](https://huggingface.co/Habana/stable-diffusion) and [Habana/stable-diffusion-2](https://huggingface.co/Habana/stable-diffusion-2) Gaudi configurations (mixed precision bf16/fp32):
- [Stable Diffusion v1.5](https://huggingface.co/runwayml/stable-diffusion-v1-5) (512x512 resolution):
| | Latency (batch size = 1) | Throughput (batch size = 8) |
| ---------------------- |:------------------------:|:---------------------------:|
| first-generation Gaudi | 3.80s | 0.308 images/s |
| Gaudi2 | 1.33s | 1.081 images/s |
- [Stable Diffusion v2.1](https://huggingface.co/stabilityai/stable-diffusion-2-1) (768x768 resolution):
| | Latency (batch size = 1) | Throughput |
| ---------------------- |:------------------------:|:-------------------------------:|
| first-generation Gaudi | 10.2s | 0.108 images/s (batch size = 4) |
| Gaudi2 | 3.17s | 0.379 images/s (batch size = 8) |
| 0 |
hf_public_repos/diffusers/docs/source/en | hf_public_repos/diffusers/docs/source/en/optimization/fp16.md | <!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# Memory and speed
We present some techniques and ideas to optimize 🤗 Diffusers _inference_ for memory or speed. As a general rule, we recommend the use of [xFormers](https://github.com/facebookresearch/xformers) for memory efficient attention, please see the recommended [installation instructions](xformers).
We'll discuss how the following settings impact performance and memory.
| | Latency | Speedup |
| ---------------- | ------- | ------- |
| original | 9.50s | x1 |
| fp16 | 3.61s | x2.63 |
| channels last | 3.30s | x2.88 |
| traced UNet | 3.21s | x2.96 |
| memory efficient attention | 2.63s | x3.61 |
<em>
obtained on NVIDIA TITAN RTX by generating a single image of size 512x512 from
the prompt "a photo of an astronaut riding a horse on mars" with 50 DDIM
steps.
</em>
### Use tf32 instead of fp32 (on Ampere and later CUDA devices)
On Ampere and later CUDA devices matrix multiplications and convolutions can use the TensorFloat32 (TF32) mode for faster but slightly less accurate computations. By default PyTorch enables TF32 mode for convolutions but not matrix multiplications, and unless a network requires full float32 precision we recommend enabling this setting for matrix multiplications, too. It can significantly speed up computations with typically negligible loss of numerical accuracy. You can read more about it [here](https://huggingface.co/docs/transformers/v4.18.0/en/performance#tf32). All you need to do is to add this before your inference:
```python
import torch
torch.backends.cuda.matmul.allow_tf32 = True
```
## Half precision weights
To save more GPU memory and get more speed, you can load and run the model weights directly in half precision. This involves loading the float16 version of the weights, which was saved to a branch named `fp16`, and telling PyTorch to use the `float16` type when loading them:
```Python
import torch
from diffusers import DiffusionPipeline
pipe = DiffusionPipeline.from_pretrained(
"runwayml/stable-diffusion-v1-5",
torch_dtype=torch.float16,
)
pipe = pipe.to("cuda")
prompt = "a photo of an astronaut riding a horse on mars"
image = pipe(prompt).images[0]
```
<Tip warning={true}>
It is strongly discouraged to make use of [`torch.autocast`](https://pytorch.org/docs/stable/amp.html#torch.autocast) in any of the pipelines as it can lead to black images and is always slower than using pure
float16 precision.
</Tip>
## Sliced attention for additional memory savings
For even additional memory savings, you can use a sliced version of attention that performs the computation in steps instead of all at once.
<Tip>
Attention slicing is useful even if a batch size of just 1 is used - as long
as the model uses more than one attention head. If there is more than one
attention head the *QK^T* attention matrix can be computed sequentially for
each head which can save a significant amount of memory.
</Tip>
To perform the attention computation sequentially over each head, you only need to invoke [`~DiffusionPipeline.enable_attention_slicing`] in your pipeline before inference, like here:
```Python
import torch
from diffusers import DiffusionPipeline
pipe = DiffusionPipeline.from_pretrained(
"runwayml/stable-diffusion-v1-5",
torch_dtype=torch.float16,
)
pipe = pipe.to("cuda")
prompt = "a photo of an astronaut riding a horse on mars"
pipe.enable_attention_slicing()
image = pipe(prompt).images[0]
```
There's a small performance penalty of about 10% slower inference times, but this method allows you to use Stable Diffusion in as little as 3.2 GB of VRAM!
## Sliced VAE decode for larger batches
To decode large batches of images with limited VRAM, or to enable batches with 32 images or more, you can use sliced VAE decode that decodes the batch latents one image at a time.
You likely want to couple this with [`~StableDiffusionPipeline.enable_attention_slicing`] or [`~StableDiffusionPipeline.enable_xformers_memory_efficient_attention`] to further minimize memory use.
To perform the VAE decode one image at a time, invoke [`~StableDiffusionPipeline.enable_vae_slicing`] in your pipeline before inference. For example:
```Python
import torch
from diffusers import StableDiffusionPipeline
pipe = StableDiffusionPipeline.from_pretrained(
"runwayml/stable-diffusion-v1-5",
torch_dtype=torch.float16,
)
pipe = pipe.to("cuda")
prompt = "a photo of an astronaut riding a horse on mars"
pipe.enable_vae_slicing()
images = pipe([prompt] * 32).images
```
You may see a small performance boost in VAE decode on multi-image batches. There should be no performance impact on single-image batches.
## Tiled VAE decode and encode for large images
Tiled VAE processing makes it possible to work with large images on limited VRAM. For example, generating 4k images in 8GB of VRAM. Tiled VAE decoder splits the image into overlapping tiles, decodes the tiles, and blends the outputs to make the final image.
You want to couple this with [`~StableDiffusionPipeline.enable_attention_slicing`] or [`~StableDiffusionPipeline.enable_xformers_memory_efficient_attention`] to further minimize memory use.
To use tiled VAE processing, invoke [`~StableDiffusionPipeline.enable_vae_tiling`] in your pipeline before inference. For example:
```python
import torch
from diffusers import StableDiffusionPipeline, UniPCMultistepScheduler
pipe = StableDiffusionPipeline.from_pretrained(
"runwayml/stable-diffusion-v1-5",
torch_dtype=torch.float16,
)
pipe.scheduler = UniPCMultistepScheduler.from_config(pipe.scheduler.config)
pipe = pipe.to("cuda")
prompt = "a beautiful landscape photograph"
pipe.enable_vae_tiling()
pipe.enable_xformers_memory_efficient_attention()
image = pipe([prompt], width=3840, height=2224, num_inference_steps=20).images[0]
```
The output image will have some tile-to-tile tone variation from the tiles having separate decoders, but you shouldn't see sharp seams between the tiles. The tiling is turned off for images that are 512x512 or smaller.
<a name="sequential_offloading"></a>
## Offloading to CPU with accelerate for memory savings
For additional memory savings, you can offload the weights to CPU and only load them to GPU when performing the forward pass.
To perform CPU offloading, all you have to do is invoke [`~StableDiffusionPipeline.enable_sequential_cpu_offload`]:
```Python
import torch
from diffusers import StableDiffusionPipeline
pipe = StableDiffusionPipeline.from_pretrained(
"runwayml/stable-diffusion-v1-5",
torch_dtype=torch.float16,
)
prompt = "a photo of an astronaut riding a horse on mars"
pipe.enable_sequential_cpu_offload()
image = pipe(prompt).images[0]
```
And you can get the memory consumption to < 3GB.
Note that this method works at the submodule level, not on whole models. This is the best way to minimize memory consumption, but inference is much slower due to the iterative nature of the process. The UNet component of the pipeline runs several times (as many as `num_inference_steps`); each time, the different submodules of the UNet are sequentially onloaded and then offloaded as they are needed, so the number of memory transfers is large.
<Tip>
Consider using <a href="#model_offloading">model offloading</a> as another point in the optimization space: it will be much faster, but memory savings won't be as large.
</Tip>
It is also possible to chain offloading with attention slicing for minimal memory consumption (< 2GB).
```Python
import torch
from diffusers import StableDiffusionPipeline
pipe = StableDiffusionPipeline.from_pretrained(
"runwayml/stable-diffusion-v1-5",
torch_dtype=torch.float16,
)
prompt = "a photo of an astronaut riding a horse on mars"
pipe.enable_sequential_cpu_offload()
pipe.enable_attention_slicing(1)
image = pipe(prompt).images[0]
```
**Note**: When using `enable_sequential_cpu_offload()`, it is important to **not** move the pipeline to CUDA beforehand or else the gain in memory consumption will only be minimal. See [this issue](https://github.com/huggingface/diffusers/issues/1934) for more information.
**Note**: `enable_sequential_cpu_offload()` is a stateful operation that installs hooks on the models.
<a name="model_offloading"></a>
## Model offloading for fast inference and memory savings
[Sequential CPU offloading](#sequential_offloading), as discussed in the previous section, preserves a lot of memory but makes inference slower, because submodules are moved to GPU as needed, and immediately returned to CPU when a new module runs.
Full-model offloading is an alternative that moves whole models to the GPU, instead of handling each model's constituent _modules_. This results in a negligible impact on inference time (compared with moving the pipeline to `cuda`), while still providing some memory savings.
In this scenario, only one of the main components of the pipeline (typically: text encoder, unet and vae)
will be in the GPU while the others wait in the CPU. Components like the UNet that run for multiple iterations will stay on GPU until they are no longer needed.
This feature can be enabled by invoking `enable_model_cpu_offload()` on the pipeline, as shown below.
```Python
import torch
from diffusers import StableDiffusionPipeline
pipe = StableDiffusionPipeline.from_pretrained(
"runwayml/stable-diffusion-v1-5",
torch_dtype=torch.float16,
)
prompt = "a photo of an astronaut riding a horse on mars"
pipe.enable_model_cpu_offload()
image = pipe(prompt).images[0]
```
This is also compatible with attention slicing for additional memory savings.
```Python
import torch
from diffusers import StableDiffusionPipeline
pipe = StableDiffusionPipeline.from_pretrained(
"runwayml/stable-diffusion-v1-5",
torch_dtype=torch.float16,
)
prompt = "a photo of an astronaut riding a horse on mars"
pipe.enable_model_cpu_offload()
pipe.enable_attention_slicing(1)
image = pipe(prompt).images[0]
```
<Tip>
This feature requires `accelerate` version 0.17.0 or larger.
</Tip>
**Note**: `enable_model_cpu_offload()` is a stateful operation that installs hooks on the models and state on the pipeline. In order to properly offload
models after they are called, it is required that the entire pipeline is run and models are called in the order the pipeline expects them to be. Exercise caution
if models are re-used outside the context of the pipeline after hooks have been installed. See [accelerate](https://huggingface.co/docs/accelerate/v0.18.0/en/package_reference/big_modeling#accelerate.hooks.remove_hook_from_module)
for further docs on removing hooks.
## Using Channels Last memory format
Channels last memory format is an alternative way of ordering NCHW tensors in memory preserving dimensions ordering. Channels last tensors ordered in such a way that channels become the densest dimension (aka storing images pixel-per-pixel). Since not all operators currently support channels last format it may result in a worst performance, so it's better to try it and see if it works for your model.
For example, in order to set the UNet model in our pipeline to use channels last format, we can use the following:
```python
print(pipe.unet.conv_out.state_dict()["weight"].stride()) # (2880, 9, 3, 1)
pipe.unet.to(memory_format=torch.channels_last) # in-place operation
print(
pipe.unet.conv_out.state_dict()["weight"].stride()
) # (2880, 1, 960, 320) having a stride of 1 for the 2nd dimension proves that it works
```
## Tracing
Tracing runs an example input tensor through your model, and captures the operations that are invoked as that input makes its way through the model's layers so that an executable or `ScriptFunction` is returned that will be optimized using just-in-time compilation.
To trace our UNet model, we can use the following:
```python
import time
import torch
from diffusers import StableDiffusionPipeline
import functools
# torch disable grad
torch.set_grad_enabled(False)
# set variables
n_experiments = 2
unet_runs_per_experiment = 50
# load inputs
def generate_inputs():
sample = torch.randn(2, 4, 64, 64).half().cuda()
timestep = torch.rand(1).half().cuda() * 999
encoder_hidden_states = torch.randn(2, 77, 768).half().cuda()
return sample, timestep, encoder_hidden_states
pipe = StableDiffusionPipeline.from_pretrained(
"runwayml/stable-diffusion-v1-5",
torch_dtype=torch.float16,
).to("cuda")
unet = pipe.unet
unet.eval()
unet.to(memory_format=torch.channels_last) # use channels_last memory format
unet.forward = functools.partial(unet.forward, return_dict=False) # set return_dict=False as default
# warmup
for _ in range(3):
with torch.inference_mode():
inputs = generate_inputs()
orig_output = unet(*inputs)
# trace
print("tracing..")
unet_traced = torch.jit.trace(unet, inputs)
unet_traced.eval()
print("done tracing")
# warmup and optimize graph
for _ in range(5):
with torch.inference_mode():
inputs = generate_inputs()
orig_output = unet_traced(*inputs)
# benchmarking
with torch.inference_mode():
for _ in range(n_experiments):
torch.cuda.synchronize()
start_time = time.time()
for _ in range(unet_runs_per_experiment):
orig_output = unet_traced(*inputs)
torch.cuda.synchronize()
print(f"unet traced inference took {time.time() - start_time:.2f} seconds")
for _ in range(n_experiments):
torch.cuda.synchronize()
start_time = time.time()
for _ in range(unet_runs_per_experiment):
orig_output = unet(*inputs)
torch.cuda.synchronize()
print(f"unet inference took {time.time() - start_time:.2f} seconds")
# save the model
unet_traced.save("unet_traced.pt")
```
Then we can replace the `unet` attribute of the pipeline with the traced model like the following
```python
from diffusers import StableDiffusionPipeline
import torch
from dataclasses import dataclass
@dataclass
class UNet2DConditionOutput:
sample: torch.FloatTensor
pipe = StableDiffusionPipeline.from_pretrained(
"runwayml/stable-diffusion-v1-5",
torch_dtype=torch.float16,
).to("cuda")
# use jitted unet
unet_traced = torch.jit.load("unet_traced.pt")
# del pipe.unet
class TracedUNet(torch.nn.Module):
def __init__(self):
super().__init__()
self.in_channels = pipe.unet.in_channels
self.device = pipe.unet.device
def forward(self, latent_model_input, t, encoder_hidden_states):
sample = unet_traced(latent_model_input, t, encoder_hidden_states)[0]
return UNet2DConditionOutput(sample=sample)
pipe.unet = TracedUNet()
with torch.inference_mode():
image = pipe([prompt] * 1, num_inference_steps=50).images[0]
```
## Memory Efficient Attention
Recent work on optimizing the bandwitdh in the attention block has generated huge speed ups and gains in GPU memory usage. The most recent being Flash Attention from @tridao: [code](https://github.com/HazyResearch/flash-attention), [paper](https://arxiv.org/pdf/2205.14135.pdf).
Here are the speedups we obtain on a few Nvidia GPUs when running the inference at 512x512 with a batch size of 1 (one prompt):
| GPU | Base Attention FP16 | Memory Efficient Attention FP16 |
|------------------ |--------------------- |--------------------------------- |
| NVIDIA Tesla T4 | 3.5it/s | 5.5it/s |
| NVIDIA 3060 RTX | 4.6it/s | 7.8it/s |
| NVIDIA A10G | 8.88it/s | 15.6it/s |
| NVIDIA RTX A6000 | 11.7it/s | 21.09it/s |
| NVIDIA TITAN RTX | 12.51it/s | 18.22it/s |
| A100-SXM4-40GB | 18.6it/s | 29.it/s |
| A100-SXM-80GB | 18.7it/s | 29.5it/s |
To leverage it just make sure you have:
<Tip warning={true}>
If you have PyTorch 2.0 installed, you shouldn't use xFormers!
</Tip>
- PyTorch > 1.12
- Cuda available
- [Installed the xformers library](xformers).
```python
from diffusers import DiffusionPipeline
import torch
pipe = DiffusionPipeline.from_pretrained(
"runwayml/stable-diffusion-v1-5",
torch_dtype=torch.float16,
).to("cuda")
pipe.enable_xformers_memory_efficient_attention()
with torch.inference_mode():
sample = pipe("a small cat")
# optional: You can disable it via
# pipe.disable_xformers_memory_efficient_attention()
```
| 0 |
hf_public_repos/diffusers | hf_public_repos/diffusers/utils/check_inits.py | # coding=utf-8
# Copyright 2023 The HuggingFace Inc. team.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import collections
import importlib.util
import os
import re
from pathlib import Path
PATH_TO_TRANSFORMERS = "src/transformers"
# Matches is_xxx_available()
_re_backend = re.compile(r"is\_([a-z_]*)_available()")
# Catches a one-line _import_struct = {xxx}
_re_one_line_import_struct = re.compile(r"^_import_structure\s+=\s+\{([^\}]+)\}")
# Catches a line with a key-values pattern: "bla": ["foo", "bar"]
_re_import_struct_key_value = re.compile(r'\s+"\S*":\s+\[([^\]]*)\]')
# Catches a line if not is_foo_available
_re_test_backend = re.compile(r"^\s*if\s+not\s+is\_[a-z_]*\_available\(\)")
# Catches a line _import_struct["bla"].append("foo")
_re_import_struct_add_one = re.compile(r'^\s*_import_structure\["\S*"\]\.append\("(\S*)"\)')
# Catches a line _import_struct["bla"].extend(["foo", "bar"]) or _import_struct["bla"] = ["foo", "bar"]
_re_import_struct_add_many = re.compile(r"^\s*_import_structure\[\S*\](?:\.extend\(|\s*=\s+)\[([^\]]*)\]")
# Catches a line with an object between quotes and a comma: "MyModel",
_re_quote_object = re.compile('^\s+"([^"]+)",')
# Catches a line with objects between brackets only: ["foo", "bar"],
_re_between_brackets = re.compile("^\s+\[([^\]]+)\]")
# Catches a line with from foo import bar, bla, boo
_re_import = re.compile(r"\s+from\s+\S*\s+import\s+([^\(\s].*)\n")
# Catches a line with try:
_re_try = re.compile(r"^\s*try:")
# Catches a line with else:
_re_else = re.compile(r"^\s*else:")
def find_backend(line):
"""Find one (or multiple) backend in a code line of the init."""
if _re_test_backend.search(line) is None:
return None
backends = [b[0] for b in _re_backend.findall(line)]
backends.sort()
return "_and_".join(backends)
def parse_init(init_file):
"""
Read an init_file and parse (per backend) the _import_structure objects defined and the TYPE_CHECKING objects
defined
"""
with open(init_file, "r", encoding="utf-8", newline="\n") as f:
lines = f.readlines()
line_index = 0
while line_index < len(lines) and not lines[line_index].startswith("_import_structure = {"):
line_index += 1
# If this is a traditional init, just return.
if line_index >= len(lines):
return None
# First grab the objects without a specific backend in _import_structure
objects = []
while not lines[line_index].startswith("if TYPE_CHECKING") and find_backend(lines[line_index]) is None:
line = lines[line_index]
# If we have everything on a single line, let's deal with it.
if _re_one_line_import_struct.search(line):
content = _re_one_line_import_struct.search(line).groups()[0]
imports = re.findall("\[([^\]]+)\]", content)
for imp in imports:
objects.extend([obj[1:-1] for obj in imp.split(", ")])
line_index += 1
continue
single_line_import_search = _re_import_struct_key_value.search(line)
if single_line_import_search is not None:
imports = [obj[1:-1] for obj in single_line_import_search.groups()[0].split(", ") if len(obj) > 0]
objects.extend(imports)
elif line.startswith(" " * 8 + '"'):
objects.append(line[9:-3])
line_index += 1
import_dict_objects = {"none": objects}
# Let's continue with backend-specific objects in _import_structure
while not lines[line_index].startswith("if TYPE_CHECKING"):
# If the line is an if not is_backend_available, we grab all objects associated.
backend = find_backend(lines[line_index])
# Check if the backend declaration is inside a try block:
if _re_try.search(lines[line_index - 1]) is None:
backend = None
if backend is not None:
line_index += 1
# Scroll until we hit the else block of try-except-else
while _re_else.search(lines[line_index]) is None:
line_index += 1
line_index += 1
objects = []
# Until we unindent, add backend objects to the list
while len(lines[line_index]) <= 1 or lines[line_index].startswith(" " * 4):
line = lines[line_index]
if _re_import_struct_add_one.search(line) is not None:
objects.append(_re_import_struct_add_one.search(line).groups()[0])
elif _re_import_struct_add_many.search(line) is not None:
imports = _re_import_struct_add_many.search(line).groups()[0].split(", ")
imports = [obj[1:-1] for obj in imports if len(obj) > 0]
objects.extend(imports)
elif _re_between_brackets.search(line) is not None:
imports = _re_between_brackets.search(line).groups()[0].split(", ")
imports = [obj[1:-1] for obj in imports if len(obj) > 0]
objects.extend(imports)
elif _re_quote_object.search(line) is not None:
objects.append(_re_quote_object.search(line).groups()[0])
elif line.startswith(" " * 8 + '"'):
objects.append(line[9:-3])
elif line.startswith(" " * 12 + '"'):
objects.append(line[13:-3])
line_index += 1
import_dict_objects[backend] = objects
else:
line_index += 1
# At this stage we are in the TYPE_CHECKING part, first grab the objects without a specific backend
objects = []
while (
line_index < len(lines)
and find_backend(lines[line_index]) is None
and not lines[line_index].startswith("else")
):
line = lines[line_index]
single_line_import_search = _re_import.search(line)
if single_line_import_search is not None:
objects.extend(single_line_import_search.groups()[0].split(", "))
elif line.startswith(" " * 8):
objects.append(line[8:-2])
line_index += 1
type_hint_objects = {"none": objects}
# Let's continue with backend-specific objects
while line_index < len(lines):
# If the line is an if is_backend_available, we grab all objects associated.
backend = find_backend(lines[line_index])
# Check if the backend declaration is inside a try block:
if _re_try.search(lines[line_index - 1]) is None:
backend = None
if backend is not None:
line_index += 1
# Scroll until we hit the else block of try-except-else
while _re_else.search(lines[line_index]) is None:
line_index += 1
line_index += 1
objects = []
# Until we unindent, add backend objects to the list
while len(lines[line_index]) <= 1 or lines[line_index].startswith(" " * 8):
line = lines[line_index]
single_line_import_search = _re_import.search(line)
if single_line_import_search is not None:
objects.extend(single_line_import_search.groups()[0].split(", "))
elif line.startswith(" " * 12):
objects.append(line[12:-2])
line_index += 1
type_hint_objects[backend] = objects
else:
line_index += 1
return import_dict_objects, type_hint_objects
def analyze_results(import_dict_objects, type_hint_objects):
"""
Analyze the differences between _import_structure objects and TYPE_CHECKING objects found in an init.
"""
def find_duplicates(seq):
return [k for k, v in collections.Counter(seq).items() if v > 1]
if list(import_dict_objects.keys()) != list(type_hint_objects.keys()):
return ["Both sides of the init do not have the same backends!"]
errors = []
for key in import_dict_objects.keys():
duplicate_imports = find_duplicates(import_dict_objects[key])
if duplicate_imports:
errors.append(f"Duplicate _import_structure definitions for: {duplicate_imports}")
duplicate_type_hints = find_duplicates(type_hint_objects[key])
if duplicate_type_hints:
errors.append(f"Duplicate TYPE_CHECKING objects for: {duplicate_type_hints}")
if sorted(set(import_dict_objects[key])) != sorted(set(type_hint_objects[key])):
name = "base imports" if key == "none" else f"{key} backend"
errors.append(f"Differences for {name}:")
for a in type_hint_objects[key]:
if a not in import_dict_objects[key]:
errors.append(f" {a} in TYPE_HINT but not in _import_structure.")
for a in import_dict_objects[key]:
if a not in type_hint_objects[key]:
errors.append(f" {a} in _import_structure but not in TYPE_HINT.")
return errors
def check_all_inits():
"""
Check all inits in the transformers repo and raise an error if at least one does not define the same objects in
both halves.
"""
failures = []
for root, _, files in os.walk(PATH_TO_TRANSFORMERS):
if "__init__.py" in files:
fname = os.path.join(root, "__init__.py")
objects = parse_init(fname)
if objects is not None:
errors = analyze_results(*objects)
if len(errors) > 0:
errors[0] = f"Problem in {fname}, both halves do not define the same objects.\n{errors[0]}"
failures.append("\n".join(errors))
if len(failures) > 0:
raise ValueError("\n\n".join(failures))
def get_transformers_submodules():
"""
Returns the list of Transformers submodules.
"""
submodules = []
for path, directories, files in os.walk(PATH_TO_TRANSFORMERS):
for folder in directories:
# Ignore private modules
if folder.startswith("_"):
directories.remove(folder)
continue
# Ignore leftovers from branches (empty folders apart from pycache)
if len(list((Path(path) / folder).glob("*.py"))) == 0:
continue
short_path = str((Path(path) / folder).relative_to(PATH_TO_TRANSFORMERS))
submodule = short_path.replace(os.path.sep, ".")
submodules.append(submodule)
for fname in files:
if fname == "__init__.py":
continue
short_path = str((Path(path) / fname).relative_to(PATH_TO_TRANSFORMERS))
submodule = short_path.replace(".py", "").replace(os.path.sep, ".")
if len(submodule.split(".")) == 1:
submodules.append(submodule)
return submodules
IGNORE_SUBMODULES = [
"convert_pytorch_checkpoint_to_tf2",
"modeling_flax_pytorch_utils",
]
def check_submodules():
# This is to make sure the transformers module imported is the one in the repo.
spec = importlib.util.spec_from_file_location(
"transformers",
os.path.join(PATH_TO_TRANSFORMERS, "__init__.py"),
submodule_search_locations=[PATH_TO_TRANSFORMERS],
)
transformers = spec.loader.load_module()
module_not_registered = [
module
for module in get_transformers_submodules()
if module not in IGNORE_SUBMODULES and module not in transformers._import_structure.keys()
]
if len(module_not_registered) > 0:
list_of_modules = "\n".join(f"- {module}" for module in module_not_registered)
raise ValueError(
"The following submodules are not properly registered in the main init of Transformers:\n"
f"{list_of_modules}\n"
"Make sure they appear somewhere in the keys of `_import_structure` with an empty list as value."
)
if __name__ == "__main__":
check_all_inits()
check_submodules()
| 0 |
hf_public_repos/diffusers | hf_public_repos/diffusers/utils/stale.py | # Copyright 2023 The HuggingFace Team, the AllenNLP library authors. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
"""
Script to close stale issue. Taken in part from the AllenNLP repository.
https://github.com/allenai/allennlp.
"""
import os
from datetime import datetime as dt
from github import Github
LABELS_TO_EXEMPT = [
"good first issue",
"good second issue",
"good difficult issue",
"enhancement",
"new pipeline/model",
"new scheduler",
"wip",
]
def main():
g = Github(os.environ["GITHUB_TOKEN"])
repo = g.get_repo("huggingface/diffusers")
open_issues = repo.get_issues(state="open")
for issue in open_issues:
comments = sorted(issue.get_comments(), key=lambda i: i.created_at, reverse=True)
last_comment = comments[0] if len(comments) > 0 else None
if (
last_comment is not None
and last_comment.user.login == "github-actions[bot]"
and (dt.utcnow() - issue.updated_at).days > 7
and (dt.utcnow() - issue.created_at).days >= 30
and not any(label.name.lower() in LABELS_TO_EXEMPT for label in issue.get_labels())
):
# Closes the issue after 7 days of inactivity since the Stalebot notification.
issue.edit(state="closed")
elif (
"stale" in issue.get_labels()
and last_comment is not None
and last_comment.user.login != "github-actions[bot]"
):
# Opens the issue if someone other than Stalebot commented.
issue.edit(state="open")
issue.remove_from_labels("stale")
elif (
(dt.utcnow() - issue.updated_at).days > 23
and (dt.utcnow() - issue.created_at).days >= 30
and not any(label.name.lower() in LABELS_TO_EXEMPT for label in issue.get_labels())
):
# Post a Stalebot notification after 23 days of inactivity.
issue.create_comment(
"This issue has been automatically marked as stale because it has not had "
"recent activity. If you think this still needs to be addressed "
"please comment on this thread.\n\nPlease note that issues that do not follow the "
"[contributing guidelines](https://github.com/huggingface/diffusers/blob/main/CONTRIBUTING.md) "
"are likely to be ignored."
)
issue.add_to_labels("stale")
if __name__ == "__main__":
main()
| 0 |
hf_public_repos/diffusers | hf_public_repos/diffusers/utils/overwrite_expected_slice.py | # coding=utf-8
# Copyright 2023 The HuggingFace Inc. team.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import argparse
from collections import defaultdict
def overwrite_file(file, class_name, test_name, correct_line, done_test):
_id = f"{file}_{class_name}_{test_name}"
done_test[_id] += 1
with open(file, "r") as f:
lines = f.readlines()
class_regex = f"class {class_name}("
test_regex = f"{4 * ' '}def {test_name}("
line_begin_regex = f"{8 * ' '}{correct_line.split()[0]}"
another_line_begin_regex = f"{16 * ' '}{correct_line.split()[0]}"
in_class = False
in_func = False
in_line = False
insert_line = False
count = 0
spaces = 0
new_lines = []
for line in lines:
if line.startswith(class_regex):
in_class = True
elif in_class and line.startswith(test_regex):
in_func = True
elif in_class and in_func and (line.startswith(line_begin_regex) or line.startswith(another_line_begin_regex)):
spaces = len(line.split(correct_line.split()[0])[0])
count += 1
if count == done_test[_id]:
in_line = True
if in_class and in_func and in_line:
if ")" not in line:
continue
else:
insert_line = True
if in_class and in_func and in_line and insert_line:
new_lines.append(f"{spaces * ' '}{correct_line}")
in_class = in_func = in_line = insert_line = False
else:
new_lines.append(line)
with open(file, "w") as f:
for line in new_lines:
f.write(line)
def main(correct, fail=None):
if fail is not None:
with open(fail, "r") as f:
test_failures = {l.strip() for l in f.readlines()}
else:
test_failures = None
with open(correct, "r") as f:
correct_lines = f.readlines()
done_tests = defaultdict(int)
for line in correct_lines:
file, class_name, test_name, correct_line = line.split(";")
if test_failures is None or "::".join([file, class_name, test_name]) in test_failures:
overwrite_file(file, class_name, test_name, correct_line, done_tests)
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument("--correct_filename", help="filename of tests with expected result")
parser.add_argument("--fail_filename", help="filename of test failures", type=str, default=None)
args = parser.parse_args()
main(args.correct_filename, args.fail_filename)
| 0 |
hf_public_repos/diffusers | hf_public_repos/diffusers/utils/check_copies.py | # coding=utf-8
# Copyright 2023 The HuggingFace Inc. team.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import argparse
import glob
import importlib.util
import os
import re
import black
from doc_builder.style_doc import style_docstrings_in_code
# All paths are set with the intent you should run this script from the root of the repo with the command
# python utils/check_copies.py
DIFFUSERS_PATH = "src/diffusers"
REPO_PATH = "."
# This is to make sure the diffusers module imported is the one in the repo.
spec = importlib.util.spec_from_file_location(
"diffusers",
os.path.join(DIFFUSERS_PATH, "__init__.py"),
submodule_search_locations=[DIFFUSERS_PATH],
)
diffusers_module = spec.loader.load_module()
def _should_continue(line, indent):
return line.startswith(indent) or len(line) <= 1 or re.search(r"^\s*\)(\s*->.*:|:)\s*$", line) is not None
def find_code_in_diffusers(object_name):
"""Find and return the code source code of `object_name`."""
parts = object_name.split(".")
i = 0
# First let's find the module where our object lives.
module = parts[i]
while i < len(parts) and not os.path.isfile(os.path.join(DIFFUSERS_PATH, f"{module}.py")):
i += 1
if i < len(parts):
module = os.path.join(module, parts[i])
if i >= len(parts):
raise ValueError(f"`object_name` should begin with the name of a module of diffusers but got {object_name}.")
with open(os.path.join(DIFFUSERS_PATH, f"{module}.py"), "r", encoding="utf-8", newline="\n") as f:
lines = f.readlines()
# Now let's find the class / func in the code!
indent = ""
line_index = 0
for name in parts[i + 1 :]:
while (
line_index < len(lines) and re.search(rf"^{indent}(class|def)\s+{name}(\(|\:)", lines[line_index]) is None
):
line_index += 1
indent += " "
line_index += 1
if line_index >= len(lines):
raise ValueError(f" {object_name} does not match any function or class in {module}.")
# We found the beginning of the class / func, now let's find the end (when the indent diminishes).
start_index = line_index
while line_index < len(lines) and _should_continue(lines[line_index], indent):
line_index += 1
# Clean up empty lines at the end (if any).
while len(lines[line_index - 1]) <= 1:
line_index -= 1
code_lines = lines[start_index:line_index]
return "".join(code_lines)
_re_copy_warning = re.compile(r"^(\s*)#\s*Copied from\s+diffusers\.(\S+\.\S+)\s*($|\S.*$)")
_re_replace_pattern = re.compile(r"^\s*(\S+)->(\S+)(\s+.*|$)")
_re_fill_pattern = re.compile(r"<FILL\s+[^>]*>")
def get_indent(code):
lines = code.split("\n")
idx = 0
while idx < len(lines) and len(lines[idx]) == 0:
idx += 1
if idx < len(lines):
return re.search(r"^(\s*)\S", lines[idx]).groups()[0]
return ""
def blackify(code):
"""
Applies the black part of our `make style` command to `code`.
"""
has_indent = len(get_indent(code)) > 0
if has_indent:
code = f"class Bla:\n{code}"
mode = black.Mode(target_versions={black.TargetVersion.PY37}, line_length=119, preview=True)
result = black.format_str(code, mode=mode)
result, _ = style_docstrings_in_code(result)
return result[len("class Bla:\n") :] if has_indent else result
def is_copy_consistent(filename, overwrite=False):
"""
Check if the code commented as a copy in `filename` matches the original.
Return the differences or overwrites the content depending on `overwrite`.
"""
with open(filename, "r", encoding="utf-8", newline="\n") as f:
lines = f.readlines()
diffs = []
line_index = 0
# Not a for loop cause `lines` is going to change (if `overwrite=True`).
while line_index < len(lines):
search = _re_copy_warning.search(lines[line_index])
if search is None:
line_index += 1
continue
# There is some copied code here, let's retrieve the original.
indent, object_name, replace_pattern = search.groups()
theoretical_code = find_code_in_diffusers(object_name)
theoretical_indent = get_indent(theoretical_code)
start_index = line_index + 1 if indent == theoretical_indent else line_index + 2
indent = theoretical_indent
line_index = start_index
# Loop to check the observed code, stop when indentation diminishes or if we see a End copy comment.
should_continue = True
while line_index < len(lines) and should_continue:
line_index += 1
if line_index >= len(lines):
break
line = lines[line_index]
should_continue = _should_continue(line, indent) and re.search(f"^{indent}# End copy", line) is None
# Clean up empty lines at the end (if any).
while len(lines[line_index - 1]) <= 1:
line_index -= 1
observed_code_lines = lines[start_index:line_index]
observed_code = "".join(observed_code_lines)
# Remove any nested `Copied from` comments to avoid circular copies
theoretical_code = [line for line in theoretical_code.split("\n") if _re_copy_warning.search(line) is None]
theoretical_code = "\n".join(theoretical_code)
# Before comparing, use the `replace_pattern` on the original code.
if len(replace_pattern) > 0:
patterns = replace_pattern.replace("with", "").split(",")
patterns = [_re_replace_pattern.search(p) for p in patterns]
for pattern in patterns:
if pattern is None:
continue
obj1, obj2, option = pattern.groups()
theoretical_code = re.sub(obj1, obj2, theoretical_code)
if option.strip() == "all-casing":
theoretical_code = re.sub(obj1.lower(), obj2.lower(), theoretical_code)
theoretical_code = re.sub(obj1.upper(), obj2.upper(), theoretical_code)
# Blackify after replacement. To be able to do that, we need the header (class or function definition)
# from the previous line
theoretical_code = blackify(lines[start_index - 1] + theoretical_code)
theoretical_code = theoretical_code[len(lines[start_index - 1]) :]
# Test for a diff and act accordingly.
if observed_code != theoretical_code:
diffs.append([object_name, start_index])
if overwrite:
lines = lines[:start_index] + [theoretical_code] + lines[line_index:]
line_index = start_index + 1
if overwrite and len(diffs) > 0:
# Warn the user a file has been modified.
print(f"Detected changes, rewriting {filename}.")
with open(filename, "w", encoding="utf-8", newline="\n") as f:
f.writelines(lines)
return diffs
def check_copies(overwrite: bool = False):
all_files = glob.glob(os.path.join(DIFFUSERS_PATH, "**/*.py"), recursive=True)
diffs = []
for filename in all_files:
new_diffs = is_copy_consistent(filename, overwrite)
diffs += [f"- {filename}: copy does not match {d[0]} at line {d[1]}" for d in new_diffs]
if not overwrite and len(diffs) > 0:
diff = "\n".join(diffs)
raise Exception(
"Found the following copy inconsistencies:\n"
+ diff
+ "\nRun `make fix-copies` or `python utils/check_copies.py --fix_and_overwrite` to fix them."
)
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument("--fix_and_overwrite", action="store_true", help="Whether to fix inconsistencies.")
args = parser.parse_args()
check_copies(args.fix_and_overwrite)
| 0 |
hf_public_repos/diffusers | hf_public_repos/diffusers/utils/check_doc_toc.py | # coding=utf-8
# Copyright 2023 The HuggingFace Inc. team.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import argparse
from collections import defaultdict
import yaml
PATH_TO_TOC = "docs/source/en/_toctree.yml"
def clean_doc_toc(doc_list):
"""
Cleans the table of content of the model documentation by removing duplicates and sorting models alphabetically.
"""
counts = defaultdict(int)
overview_doc = []
new_doc_list = []
for doc in doc_list:
if "local" in doc:
counts[doc["local"]] += 1
if doc["title"].lower() == "overview":
overview_doc.append({"local": doc["local"], "title": doc["title"]})
else:
new_doc_list.append(doc)
doc_list = new_doc_list
duplicates = [key for key, value in counts.items() if value > 1]
new_doc = []
for duplicate_key in duplicates:
titles = list({doc["title"] for doc in doc_list if doc["local"] == duplicate_key})
if len(titles) > 1:
raise ValueError(
f"{duplicate_key} is present several times in the documentation table of content at "
"`docs/source/en/_toctree.yml` with different *Title* values. Choose one of those and remove the "
"others."
)
# Only add this once
new_doc.append({"local": duplicate_key, "title": titles[0]})
# Add none duplicate-keys
new_doc.extend([doc for doc in doc_list if "local" not in counts or counts[doc["local"]] == 1])
new_doc = sorted(new_doc, key=lambda s: s["title"].lower())
# "overview" gets special treatment and is always first
if len(overview_doc) > 1:
raise ValueError("{doc_list} has two 'overview' docs which is not allowed.")
overview_doc.extend(new_doc)
# Sort
return overview_doc
def check_scheduler_doc(overwrite=False):
with open(PATH_TO_TOC, encoding="utf-8") as f:
content = yaml.safe_load(f.read())
# Get to the API doc
api_idx = 0
while content[api_idx]["title"] != "API":
api_idx += 1
api_doc = content[api_idx]["sections"]
# Then to the model doc
scheduler_idx = 0
while api_doc[scheduler_idx]["title"] != "Schedulers":
scheduler_idx += 1
scheduler_doc = api_doc[scheduler_idx]["sections"]
new_scheduler_doc = clean_doc_toc(scheduler_doc)
diff = False
if new_scheduler_doc != scheduler_doc:
diff = True
if overwrite:
api_doc[scheduler_idx]["sections"] = new_scheduler_doc
if diff:
if overwrite:
content[api_idx]["sections"] = api_doc
with open(PATH_TO_TOC, "w", encoding="utf-8") as f:
f.write(yaml.dump(content, allow_unicode=True))
else:
raise ValueError(
"The model doc part of the table of content is not properly sorted, run `make style` to fix this."
)
def check_pipeline_doc(overwrite=False):
with open(PATH_TO_TOC, encoding="utf-8") as f:
content = yaml.safe_load(f.read())
# Get to the API doc
api_idx = 0
while content[api_idx]["title"] != "API":
api_idx += 1
api_doc = content[api_idx]["sections"]
# Then to the model doc
pipeline_idx = 0
while api_doc[pipeline_idx]["title"] != "Pipelines":
pipeline_idx += 1
diff = False
pipeline_docs = api_doc[pipeline_idx]["sections"]
new_pipeline_docs = []
# sort sub pipeline docs
for pipeline_doc in pipeline_docs:
if "section" in pipeline_doc:
sub_pipeline_doc = pipeline_doc["section"]
new_sub_pipeline_doc = clean_doc_toc(sub_pipeline_doc)
if overwrite:
pipeline_doc["section"] = new_sub_pipeline_doc
new_pipeline_docs.append(pipeline_doc)
# sort overall pipeline doc
new_pipeline_docs = clean_doc_toc(new_pipeline_docs)
if new_pipeline_docs != pipeline_docs:
diff = True
if overwrite:
api_doc[pipeline_idx]["sections"] = new_pipeline_docs
if diff:
if overwrite:
content[api_idx]["sections"] = api_doc
with open(PATH_TO_TOC, "w", encoding="utf-8") as f:
f.write(yaml.dump(content, allow_unicode=True))
else:
raise ValueError(
"The model doc part of the table of content is not properly sorted, run `make style` to fix this."
)
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument("--fix_and_overwrite", action="store_true", help="Whether to fix inconsistencies.")
args = parser.parse_args()
check_scheduler_doc(args.fix_and_overwrite)
check_pipeline_doc(args.fix_and_overwrite)
| 0 |
hf_public_repos/diffusers | hf_public_repos/diffusers/utils/release.py | # coding=utf-8
# Copyright 2021 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import argparse
import os
import re
import packaging.version
PATH_TO_EXAMPLES = "examples/"
REPLACE_PATTERNS = {
"examples": (re.compile(r'^check_min_version\("[^"]+"\)\s*$', re.MULTILINE), 'check_min_version("VERSION")\n'),
"init": (re.compile(r'^__version__\s+=\s+"([^"]+)"\s*$', re.MULTILINE), '__version__ = "VERSION"\n'),
"setup": (re.compile(r'^(\s*)version\s*=\s*"[^"]+",', re.MULTILINE), r'\1version="VERSION",'),
"doc": (re.compile(r'^(\s*)release\s*=\s*"[^"]+"$', re.MULTILINE), 'release = "VERSION"\n'),
}
REPLACE_FILES = {
"init": "src/diffusers/__init__.py",
"setup": "setup.py",
}
README_FILE = "README.md"
def update_version_in_file(fname, version, pattern):
"""Update the version in one file using a specific pattern."""
with open(fname, "r", encoding="utf-8", newline="\n") as f:
code = f.read()
re_pattern, replace = REPLACE_PATTERNS[pattern]
replace = replace.replace("VERSION", version)
code = re_pattern.sub(replace, code)
with open(fname, "w", encoding="utf-8", newline="\n") as f:
f.write(code)
def update_version_in_examples(version):
"""Update the version in all examples files."""
for folder, directories, fnames in os.walk(PATH_TO_EXAMPLES):
# Removing some of the folders with non-actively maintained examples from the walk
if "research_projects" in directories:
directories.remove("research_projects")
if "legacy" in directories:
directories.remove("legacy")
for fname in fnames:
if fname.endswith(".py"):
update_version_in_file(os.path.join(folder, fname), version, pattern="examples")
def global_version_update(version, patch=False):
"""Update the version in all needed files."""
for pattern, fname in REPLACE_FILES.items():
update_version_in_file(fname, version, pattern)
if not patch:
update_version_in_examples(version)
def clean_main_ref_in_model_list():
"""Replace the links from main doc tp stable doc in the model list of the README."""
# If the introduction or the conclusion of the list change, the prompts may need to be updated.
_start_prompt = "🤗 Transformers currently provides the following architectures"
_end_prompt = "1. Want to contribute a new model?"
with open(README_FILE, "r", encoding="utf-8", newline="\n") as f:
lines = f.readlines()
# Find the start of the list.
start_index = 0
while not lines[start_index].startswith(_start_prompt):
start_index += 1
start_index += 1
index = start_index
# Update the lines in the model list.
while not lines[index].startswith(_end_prompt):
if lines[index].startswith("1."):
lines[index] = lines[index].replace(
"https://huggingface.co/docs/diffusers/main/model_doc",
"https://huggingface.co/docs/diffusers/model_doc",
)
index += 1
with open(README_FILE, "w", encoding="utf-8", newline="\n") as f:
f.writelines(lines)
def get_version():
"""Reads the current version in the __init__."""
with open(REPLACE_FILES["init"], "r") as f:
code = f.read()
default_version = REPLACE_PATTERNS["init"][0].search(code).groups()[0]
return packaging.version.parse(default_version)
def pre_release_work(patch=False):
"""Do all the necessary pre-release steps."""
# First let's get the default version: base version if we are in dev, bump minor otherwise.
default_version = get_version()
if patch and default_version.is_devrelease:
raise ValueError("Can't create a patch version from the dev branch, checkout a released version!")
if default_version.is_devrelease:
default_version = default_version.base_version
elif patch:
default_version = f"{default_version.major}.{default_version.minor}.{default_version.micro + 1}"
else:
default_version = f"{default_version.major}.{default_version.minor + 1}.0"
# Now let's ask nicely if that's the right one.
version = input(f"Which version are you releasing? [{default_version}]")
if len(version) == 0:
version = default_version
print(f"Updating version to {version}.")
global_version_update(version, patch=patch)
# if not patch:
# print("Cleaning main README, don't forget to run `make fix-copies`.")
# clean_main_ref_in_model_list()
def post_release_work():
"""Do all the necesarry post-release steps."""
# First let's get the current version
current_version = get_version()
dev_version = f"{current_version.major}.{current_version.minor + 1}.0.dev0"
current_version = current_version.base_version
# Check with the user we got that right.
version = input(f"Which version are we developing now? [{dev_version}]")
if len(version) == 0:
version = dev_version
print(f"Updating version to {version}.")
global_version_update(version)
# print("Cleaning main README, don't forget to run `make fix-copies`.")
# clean_main_ref_in_model_list()
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument("--post_release", action="store_true", help="Whether this is pre or post release.")
parser.add_argument("--patch", action="store_true", help="Whether or not this is a patch release.")
args = parser.parse_args()
if not args.post_release:
pre_release_work(patch=args.patch)
elif args.patch:
print("Nothing to do after a patch :-)")
else:
post_release_work()
| 0 |
hf_public_repos/diffusers | hf_public_repos/diffusers/utils/custom_init_isort.py | # coding=utf-8
# Copyright 2023 The HuggingFace Inc. team.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import argparse
import os
import re
PATH_TO_TRANSFORMERS = "src/diffusers"
# Pattern that looks at the indentation in a line.
_re_indent = re.compile(r"^(\s*)\S")
# Pattern that matches `"key":" and puts `key` in group 0.
_re_direct_key = re.compile(r'^\s*"([^"]+)":')
# Pattern that matches `_import_structure["key"]` and puts `key` in group 0.
_re_indirect_key = re.compile(r'^\s*_import_structure\["([^"]+)"\]')
# Pattern that matches `"key",` and puts `key` in group 0.
_re_strip_line = re.compile(r'^\s*"([^"]+)",\s*$')
# Pattern that matches any `[stuff]` and puts `stuff` in group 0.
_re_bracket_content = re.compile(r"\[([^\]]+)\]")
def get_indent(line):
"""Returns the indent in `line`."""
search = _re_indent.search(line)
return "" if search is None else search.groups()[0]
def split_code_in_indented_blocks(code, indent_level="", start_prompt=None, end_prompt=None):
"""
Split `code` into its indented blocks, starting at `indent_level`. If provided, begins splitting after
`start_prompt` and stops at `end_prompt` (but returns what's before `start_prompt` as a first block and what's
after `end_prompt` as a last block, so `code` is always the same as joining the result of this function).
"""
# Let's split the code into lines and move to start_index.
index = 0
lines = code.split("\n")
if start_prompt is not None:
while not lines[index].startswith(start_prompt):
index += 1
blocks = ["\n".join(lines[:index])]
else:
blocks = []
# We split into blocks until we get to the `end_prompt` (or the end of the block).
current_block = [lines[index]]
index += 1
while index < len(lines) and (end_prompt is None or not lines[index].startswith(end_prompt)):
if len(lines[index]) > 0 and get_indent(lines[index]) == indent_level:
if len(current_block) > 0 and get_indent(current_block[-1]).startswith(indent_level + " "):
current_block.append(lines[index])
blocks.append("\n".join(current_block))
if index < len(lines) - 1:
current_block = [lines[index + 1]]
index += 1
else:
current_block = []
else:
blocks.append("\n".join(current_block))
current_block = [lines[index]]
else:
current_block.append(lines[index])
index += 1
# Adds current block if it's nonempty.
if len(current_block) > 0:
blocks.append("\n".join(current_block))
# Add final block after end_prompt if provided.
if end_prompt is not None and index < len(lines):
blocks.append("\n".join(lines[index:]))
return blocks
def ignore_underscore(key):
"Wraps a `key` (that maps an object to string) to lower case and remove underscores."
def _inner(x):
return key(x).lower().replace("_", "")
return _inner
def sort_objects(objects, key=None):
"Sort a list of `objects` following the rules of isort. `key` optionally maps an object to a str."
# If no key is provided, we use a noop.
def noop(x):
return x
if key is None:
key = noop
# Constants are all uppercase, they go first.
constants = [obj for obj in objects if key(obj).isupper()]
# Classes are not all uppercase but start with a capital, they go second.
classes = [obj for obj in objects if key(obj)[0].isupper() and not key(obj).isupper()]
# Functions begin with a lowercase, they go last.
functions = [obj for obj in objects if not key(obj)[0].isupper()]
key1 = ignore_underscore(key)
return sorted(constants, key=key1) + sorted(classes, key=key1) + sorted(functions, key=key1)
def sort_objects_in_import(import_statement):
"""
Return the same `import_statement` but with objects properly sorted.
"""
# This inner function sort imports between [ ].
def _replace(match):
imports = match.groups()[0]
if "," not in imports:
return f"[{imports}]"
keys = [part.strip().replace('"', "") for part in imports.split(",")]
# We will have a final empty element if the line finished with a comma.
if len(keys[-1]) == 0:
keys = keys[:-1]
return "[" + ", ".join([f'"{k}"' for k in sort_objects(keys)]) + "]"
lines = import_statement.split("\n")
if len(lines) > 3:
# Here we have to sort internal imports that are on several lines (one per name):
# key: [
# "object1",
# "object2",
# ...
# ]
# We may have to ignore one or two lines on each side.
idx = 2 if lines[1].strip() == "[" else 1
keys_to_sort = [(i, _re_strip_line.search(line).groups()[0]) for i, line in enumerate(lines[idx:-idx])]
sorted_indices = sort_objects(keys_to_sort, key=lambda x: x[1])
sorted_lines = [lines[x[0] + idx] for x in sorted_indices]
return "\n".join(lines[:idx] + sorted_lines + lines[-idx:])
elif len(lines) == 3:
# Here we have to sort internal imports that are on one separate line:
# key: [
# "object1", "object2", ...
# ]
if _re_bracket_content.search(lines[1]) is not None:
lines[1] = _re_bracket_content.sub(_replace, lines[1])
else:
keys = [part.strip().replace('"', "") for part in lines[1].split(",")]
# We will have a final empty element if the line finished with a comma.
if len(keys[-1]) == 0:
keys = keys[:-1]
lines[1] = get_indent(lines[1]) + ", ".join([f'"{k}"' for k in sort_objects(keys)])
return "\n".join(lines)
else:
# Finally we have to deal with imports fitting on one line
import_statement = _re_bracket_content.sub(_replace, import_statement)
return import_statement
def sort_imports(file, check_only=True):
"""
Sort `_import_structure` imports in `file`, `check_only` determines if we only check or overwrite.
"""
with open(file, "r") as f:
code = f.read()
if "_import_structure" not in code:
return
# Blocks of indent level 0
main_blocks = split_code_in_indented_blocks(
code, start_prompt="_import_structure = {", end_prompt="if TYPE_CHECKING:"
)
# We ignore block 0 (everything until start_prompt) and the last block (everything after end_prompt).
for block_idx in range(1, len(main_blocks) - 1):
# Check if the block contains some `_import_structure`s thingy to sort.
block = main_blocks[block_idx]
block_lines = block.split("\n")
# Get to the start of the imports.
line_idx = 0
while line_idx < len(block_lines) and "_import_structure" not in block_lines[line_idx]:
# Skip dummy import blocks
if "import dummy" in block_lines[line_idx]:
line_idx = len(block_lines)
else:
line_idx += 1
if line_idx >= len(block_lines):
continue
# Ignore beginning and last line: they don't contain anything.
internal_block_code = "\n".join(block_lines[line_idx:-1])
indent = get_indent(block_lines[1])
# Slit the internal block into blocks of indent level 1.
internal_blocks = split_code_in_indented_blocks(internal_block_code, indent_level=indent)
# We have two categories of import key: list or _import_structure[key].append/extend
pattern = _re_direct_key if "_import_structure" in block_lines[0] else _re_indirect_key
# Grab the keys, but there is a trap: some lines are empty or just comments.
keys = [(pattern.search(b).groups()[0] if pattern.search(b) is not None else None) for b in internal_blocks]
# We only sort the lines with a key.
keys_to_sort = [(i, key) for i, key in enumerate(keys) if key is not None]
sorted_indices = [x[0] for x in sorted(keys_to_sort, key=lambda x: x[1])]
# We reorder the blocks by leaving empty lines/comments as they were and reorder the rest.
count = 0
reordered_blocks = []
for i in range(len(internal_blocks)):
if keys[i] is None:
reordered_blocks.append(internal_blocks[i])
else:
block = sort_objects_in_import(internal_blocks[sorted_indices[count]])
reordered_blocks.append(block)
count += 1
# And we put our main block back together with its first and last line.
main_blocks[block_idx] = "\n".join(block_lines[:line_idx] + reordered_blocks + [block_lines[-1]])
if code != "\n".join(main_blocks):
if check_only:
return True
else:
print(f"Overwriting {file}.")
with open(file, "w") as f:
f.write("\n".join(main_blocks))
def sort_imports_in_all_inits(check_only=True):
failures = []
for root, _, files in os.walk(PATH_TO_TRANSFORMERS):
if "__init__.py" in files:
result = sort_imports(os.path.join(root, "__init__.py"), check_only=check_only)
if result:
failures = [os.path.join(root, "__init__.py")]
if len(failures) > 0:
raise ValueError(f"Would overwrite {len(failures)} files, run `make style`.")
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument("--check_only", action="store_true", help="Whether to only check or fix style.")
args = parser.parse_args()
sort_imports_in_all_inits(check_only=args.check_only)
| 0 |
hf_public_repos/diffusers | hf_public_repos/diffusers/utils/print_env.py | #!/usr/bin/env python3
# coding=utf-8
# Copyright 2023 The HuggingFace Inc. team.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
# this script dumps information about the environment
import os
import platform
import sys
os.environ["TF_CPP_MIN_LOG_LEVEL"] = "3"
print("Python version:", sys.version)
print("OS platform:", platform.platform())
print("OS architecture:", platform.machine())
try:
import torch
print("Torch version:", torch.__version__)
print("Cuda available:", torch.cuda.is_available())
print("Cuda version:", torch.version.cuda)
print("CuDNN version:", torch.backends.cudnn.version())
print("Number of GPUs available:", torch.cuda.device_count())
except ImportError:
print("Torch version:", None)
try:
import transformers
print("transformers version:", transformers.__version__)
except ImportError:
print("transformers version:", None)
| 0 |
hf_public_repos/diffusers | hf_public_repos/diffusers/utils/get_modified_files.py | # coding=utf-8
# Copyright 2023 The HuggingFace Inc. team.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
# this script reports modified .py files under the desired list of top-level sub-dirs passed as a list of arguments, e.g.:
# python ./utils/get_modified_files.py utils src tests examples
#
# it uses git to find the forking point and which files were modified - i.e. files not under git won't be considered
# since the output of this script is fed into Makefile commands it doesn't print a newline after the results
import re
import subprocess
import sys
fork_point_sha = subprocess.check_output("git merge-base main HEAD".split()).decode("utf-8")
modified_files = subprocess.check_output(f"git diff --name-only {fork_point_sha}".split()).decode("utf-8").split()
joined_dirs = "|".join(sys.argv[1:])
regex = re.compile(rf"^({joined_dirs}).*?\.py$")
relevant_modified_files = [x for x in modified_files if regex.match(x)]
print(" ".join(relevant_modified_files), end="")
| 0 |
hf_public_repos/diffusers | hf_public_repos/diffusers/utils/check_repo.py | # coding=utf-8
# Copyright 2023 The HuggingFace Inc. team.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import importlib
import inspect
import os
import re
import warnings
from collections import OrderedDict
from difflib import get_close_matches
from pathlib import Path
from diffusers.models.auto import get_values
from diffusers.utils import ENV_VARS_TRUE_VALUES, is_flax_available, is_tf_available, is_torch_available
# All paths are set with the intent you should run this script from the root of the repo with the command
# python utils/check_repo.py
PATH_TO_DIFFUSERS = "src/diffusers"
PATH_TO_TESTS = "tests"
PATH_TO_DOC = "docs/source/en"
# Update this list with models that are supposed to be private.
PRIVATE_MODELS = [
"DPRSpanPredictor",
"RealmBertModel",
"T5Stack",
"TFDPRSpanPredictor",
]
# Update this list for models that are not tested with a comment explaining the reason it should not be.
# Being in this list is an exception and should **not** be the rule.
IGNORE_NON_TESTED = PRIVATE_MODELS.copy() + [
# models to ignore for not tested
"OPTDecoder", # Building part of bigger (tested) model.
"DecisionTransformerGPT2Model", # Building part of bigger (tested) model.
"SegformerDecodeHead", # Building part of bigger (tested) model.
"PLBartEncoder", # Building part of bigger (tested) model.
"PLBartDecoder", # Building part of bigger (tested) model.
"PLBartDecoderWrapper", # Building part of bigger (tested) model.
"BigBirdPegasusEncoder", # Building part of bigger (tested) model.
"BigBirdPegasusDecoder", # Building part of bigger (tested) model.
"BigBirdPegasusDecoderWrapper", # Building part of bigger (tested) model.
"DetrEncoder", # Building part of bigger (tested) model.
"DetrDecoder", # Building part of bigger (tested) model.
"DetrDecoderWrapper", # Building part of bigger (tested) model.
"M2M100Encoder", # Building part of bigger (tested) model.
"M2M100Decoder", # Building part of bigger (tested) model.
"Speech2TextEncoder", # Building part of bigger (tested) model.
"Speech2TextDecoder", # Building part of bigger (tested) model.
"LEDEncoder", # Building part of bigger (tested) model.
"LEDDecoder", # Building part of bigger (tested) model.
"BartDecoderWrapper", # Building part of bigger (tested) model.
"BartEncoder", # Building part of bigger (tested) model.
"BertLMHeadModel", # Needs to be setup as decoder.
"BlenderbotSmallEncoder", # Building part of bigger (tested) model.
"BlenderbotSmallDecoderWrapper", # Building part of bigger (tested) model.
"BlenderbotEncoder", # Building part of bigger (tested) model.
"BlenderbotDecoderWrapper", # Building part of bigger (tested) model.
"MBartEncoder", # Building part of bigger (tested) model.
"MBartDecoderWrapper", # Building part of bigger (tested) model.
"MegatronBertLMHeadModel", # Building part of bigger (tested) model.
"MegatronBertEncoder", # Building part of bigger (tested) model.
"MegatronBertDecoder", # Building part of bigger (tested) model.
"MegatronBertDecoderWrapper", # Building part of bigger (tested) model.
"PegasusEncoder", # Building part of bigger (tested) model.
"PegasusDecoderWrapper", # Building part of bigger (tested) model.
"DPREncoder", # Building part of bigger (tested) model.
"ProphetNetDecoderWrapper", # Building part of bigger (tested) model.
"RealmBertModel", # Building part of bigger (tested) model.
"RealmReader", # Not regular model.
"RealmScorer", # Not regular model.
"RealmForOpenQA", # Not regular model.
"ReformerForMaskedLM", # Needs to be setup as decoder.
"Speech2Text2DecoderWrapper", # Building part of bigger (tested) model.
"TFDPREncoder", # Building part of bigger (tested) model.
"TFElectraMainLayer", # Building part of bigger (tested) model (should it be a TFModelMixin ?)
"TFRobertaForMultipleChoice", # TODO: fix
"TrOCRDecoderWrapper", # Building part of bigger (tested) model.
"SeparableConv1D", # Building part of bigger (tested) model.
"FlaxBartForCausalLM", # Building part of bigger (tested) model.
"FlaxBertForCausalLM", # Building part of bigger (tested) model. Tested implicitly through FlaxRobertaForCausalLM.
"OPTDecoderWrapper",
]
# Update this list with test files that don't have a tester with a `all_model_classes` variable and which don't
# trigger the common tests.
TEST_FILES_WITH_NO_COMMON_TESTS = [
"models/decision_transformer/test_modeling_decision_transformer.py",
"models/camembert/test_modeling_camembert.py",
"models/mt5/test_modeling_flax_mt5.py",
"models/mbart/test_modeling_mbart.py",
"models/mt5/test_modeling_mt5.py",
"models/pegasus/test_modeling_pegasus.py",
"models/camembert/test_modeling_tf_camembert.py",
"models/mt5/test_modeling_tf_mt5.py",
"models/xlm_roberta/test_modeling_tf_xlm_roberta.py",
"models/xlm_roberta/test_modeling_flax_xlm_roberta.py",
"models/xlm_prophetnet/test_modeling_xlm_prophetnet.py",
"models/xlm_roberta/test_modeling_xlm_roberta.py",
"models/vision_text_dual_encoder/test_modeling_vision_text_dual_encoder.py",
"models/vision_text_dual_encoder/test_modeling_flax_vision_text_dual_encoder.py",
"models/decision_transformer/test_modeling_decision_transformer.py",
]
# Update this list for models that are not in any of the auto MODEL_XXX_MAPPING. Being in this list is an exception and
# should **not** be the rule.
IGNORE_NON_AUTO_CONFIGURED = PRIVATE_MODELS.copy() + [
# models to ignore for model xxx mapping
"DPTForDepthEstimation",
"DecisionTransformerGPT2Model",
"GLPNForDepthEstimation",
"ViltForQuestionAnswering",
"ViltForImagesAndTextClassification",
"ViltForImageAndTextRetrieval",
"ViltForMaskedLM",
"XGLMEncoder",
"XGLMDecoder",
"XGLMDecoderWrapper",
"PerceiverForMultimodalAutoencoding",
"PerceiverForOpticalFlow",
"SegformerDecodeHead",
"FlaxBeitForMaskedImageModeling",
"PLBartEncoder",
"PLBartDecoder",
"PLBartDecoderWrapper",
"BeitForMaskedImageModeling",
"CLIPTextModel",
"CLIPVisionModel",
"TFCLIPTextModel",
"TFCLIPVisionModel",
"FlaxCLIPTextModel",
"FlaxCLIPVisionModel",
"FlaxWav2Vec2ForCTC",
"DetrForSegmentation",
"DPRReader",
"FlaubertForQuestionAnswering",
"FlavaImageCodebook",
"FlavaTextModel",
"FlavaImageModel",
"FlavaMultimodalModel",
"GPT2DoubleHeadsModel",
"LukeForMaskedLM",
"LukeForEntityClassification",
"LukeForEntityPairClassification",
"LukeForEntitySpanClassification",
"OpenAIGPTDoubleHeadsModel",
"RagModel",
"RagSequenceForGeneration",
"RagTokenForGeneration",
"RealmEmbedder",
"RealmForOpenQA",
"RealmScorer",
"RealmReader",
"TFDPRReader",
"TFGPT2DoubleHeadsModel",
"TFOpenAIGPTDoubleHeadsModel",
"TFRagModel",
"TFRagSequenceForGeneration",
"TFRagTokenForGeneration",
"Wav2Vec2ForCTC",
"HubertForCTC",
"SEWForCTC",
"SEWDForCTC",
"XLMForQuestionAnswering",
"XLNetForQuestionAnswering",
"SeparableConv1D",
"VisualBertForRegionToPhraseAlignment",
"VisualBertForVisualReasoning",
"VisualBertForQuestionAnswering",
"VisualBertForMultipleChoice",
"TFWav2Vec2ForCTC",
"TFHubertForCTC",
"MaskFormerForInstanceSegmentation",
]
# Update this list for models that have multiple model types for the same
# model doc
MODEL_TYPE_TO_DOC_MAPPING = OrderedDict(
[
("data2vec-text", "data2vec"),
("data2vec-audio", "data2vec"),
("data2vec-vision", "data2vec"),
]
)
# This is to make sure the transformers module imported is the one in the repo.
spec = importlib.util.spec_from_file_location(
"diffusers",
os.path.join(PATH_TO_DIFFUSERS, "__init__.py"),
submodule_search_locations=[PATH_TO_DIFFUSERS],
)
diffusers = spec.loader.load_module()
def check_model_list():
"""Check the model list inside the transformers library."""
# Get the models from the directory structure of `src/diffusers/models/`
models_dir = os.path.join(PATH_TO_DIFFUSERS, "models")
_models = []
for model in os.listdir(models_dir):
model_dir = os.path.join(models_dir, model)
if os.path.isdir(model_dir) and "__init__.py" in os.listdir(model_dir):
_models.append(model)
# Get the models from the directory structure of `src/transformers/models/`
models = [model for model in dir(diffusers.models) if not model.startswith("__")]
missing_models = sorted(set(_models).difference(models))
if missing_models:
raise Exception(
f"The following models should be included in {models_dir}/__init__.py: {','.join(missing_models)}."
)
# If some modeling modules should be ignored for all checks, they should be added in the nested list
# _ignore_modules of this function.
def get_model_modules():
"""Get the model modules inside the transformers library."""
_ignore_modules = [
"modeling_auto",
"modeling_encoder_decoder",
"modeling_marian",
"modeling_mmbt",
"modeling_outputs",
"modeling_retribert",
"modeling_utils",
"modeling_flax_auto",
"modeling_flax_encoder_decoder",
"modeling_flax_utils",
"modeling_speech_encoder_decoder",
"modeling_flax_speech_encoder_decoder",
"modeling_flax_vision_encoder_decoder",
"modeling_transfo_xl_utilities",
"modeling_tf_auto",
"modeling_tf_encoder_decoder",
"modeling_tf_outputs",
"modeling_tf_pytorch_utils",
"modeling_tf_utils",
"modeling_tf_transfo_xl_utilities",
"modeling_tf_vision_encoder_decoder",
"modeling_vision_encoder_decoder",
]
modules = []
for model in dir(diffusers.models):
# There are some magic dunder attributes in the dir, we ignore them
if not model.startswith("__"):
model_module = getattr(diffusers.models, model)
for submodule in dir(model_module):
if submodule.startswith("modeling") and submodule not in _ignore_modules:
modeling_module = getattr(model_module, submodule)
if inspect.ismodule(modeling_module):
modules.append(modeling_module)
return modules
def get_models(module, include_pretrained=False):
"""Get the objects in module that are models."""
models = []
model_classes = (diffusers.ModelMixin, diffusers.TFModelMixin, diffusers.FlaxModelMixin)
for attr_name in dir(module):
if not include_pretrained and ("Pretrained" in attr_name or "PreTrained" in attr_name):
continue
attr = getattr(module, attr_name)
if isinstance(attr, type) and issubclass(attr, model_classes) and attr.__module__ == module.__name__:
models.append((attr_name, attr))
return models
def is_a_private_model(model):
"""Returns True if the model should not be in the main init."""
if model in PRIVATE_MODELS:
return True
# Wrapper, Encoder and Decoder are all privates
if model.endswith("Wrapper"):
return True
if model.endswith("Encoder"):
return True
if model.endswith("Decoder"):
return True
return False
def check_models_are_in_init():
"""Checks all models defined in the library are in the main init."""
models_not_in_init = []
dir_transformers = dir(diffusers)
for module in get_model_modules():
models_not_in_init += [
model[0] for model in get_models(module, include_pretrained=True) if model[0] not in dir_transformers
]
# Remove private models
models_not_in_init = [model for model in models_not_in_init if not is_a_private_model(model)]
if len(models_not_in_init) > 0:
raise Exception(f"The following models should be in the main init: {','.join(models_not_in_init)}.")
# If some test_modeling files should be ignored when checking models are all tested, they should be added in the
# nested list _ignore_files of this function.
def get_model_test_files():
"""Get the model test files.
The returned files should NOT contain the `tests` (i.e. `PATH_TO_TESTS` defined in this script). They will be
considered as paths relative to `tests`. A caller has to use `os.path.join(PATH_TO_TESTS, ...)` to access the files.
"""
_ignore_files = [
"test_modeling_common",
"test_modeling_encoder_decoder",
"test_modeling_flax_encoder_decoder",
"test_modeling_flax_speech_encoder_decoder",
"test_modeling_marian",
"test_modeling_tf_common",
"test_modeling_tf_encoder_decoder",
]
test_files = []
# Check both `PATH_TO_TESTS` and `PATH_TO_TESTS/models`
model_test_root = os.path.join(PATH_TO_TESTS, "models")
model_test_dirs = []
for x in os.listdir(model_test_root):
x = os.path.join(model_test_root, x)
if os.path.isdir(x):
model_test_dirs.append(x)
for target_dir in [PATH_TO_TESTS] + model_test_dirs:
for file_or_dir in os.listdir(target_dir):
path = os.path.join(target_dir, file_or_dir)
if os.path.isfile(path):
filename = os.path.split(path)[-1]
if "test_modeling" in filename and os.path.splitext(filename)[0] not in _ignore_files:
file = os.path.join(*path.split(os.sep)[1:])
test_files.append(file)
return test_files
# This is a bit hacky but I didn't find a way to import the test_file as a module and read inside the tester class
# for the all_model_classes variable.
def find_tested_models(test_file):
"""Parse the content of test_file to detect what's in all_model_classes"""
# This is a bit hacky but I didn't find a way to import the test_file as a module and read inside the class
with open(os.path.join(PATH_TO_TESTS, test_file), "r", encoding="utf-8", newline="\n") as f:
content = f.read()
all_models = re.findall(r"all_model_classes\s+=\s+\(\s*\(([^\)]*)\)", content)
# Check with one less parenthesis as well
all_models += re.findall(r"all_model_classes\s+=\s+\(([^\)]*)\)", content)
if len(all_models) > 0:
model_tested = []
for entry in all_models:
for line in entry.split(","):
name = line.strip()
if len(name) > 0:
model_tested.append(name)
return model_tested
def check_models_are_tested(module, test_file):
"""Check models defined in module are tested in test_file."""
# XxxModelMixin are not tested
defined_models = get_models(module)
tested_models = find_tested_models(test_file)
if tested_models is None:
if test_file.replace(os.path.sep, "/") in TEST_FILES_WITH_NO_COMMON_TESTS:
return
return [
f"{test_file} should define `all_model_classes` to apply common tests to the models it tests. "
+ "If this intentional, add the test filename to `TEST_FILES_WITH_NO_COMMON_TESTS` in the file "
+ "`utils/check_repo.py`."
]
failures = []
for model_name, _ in defined_models:
if model_name not in tested_models and model_name not in IGNORE_NON_TESTED:
failures.append(
f"{model_name} is defined in {module.__name__} but is not tested in "
+ f"{os.path.join(PATH_TO_TESTS, test_file)}. Add it to the all_model_classes in that file."
+ "If common tests should not applied to that model, add its name to `IGNORE_NON_TESTED`"
+ "in the file `utils/check_repo.py`."
)
return failures
def check_all_models_are_tested():
"""Check all models are properly tested."""
modules = get_model_modules()
test_files = get_model_test_files()
failures = []
for module in modules:
test_file = [file for file in test_files if f"test_{module.__name__.split('.')[-1]}.py" in file]
if len(test_file) == 0:
failures.append(f"{module.__name__} does not have its corresponding test file {test_file}.")
elif len(test_file) > 1:
failures.append(f"{module.__name__} has several test files: {test_file}.")
else:
test_file = test_file[0]
new_failures = check_models_are_tested(module, test_file)
if new_failures is not None:
failures += new_failures
if len(failures) > 0:
raise Exception(f"There were {len(failures)} failures:\n" + "\n".join(failures))
def get_all_auto_configured_models():
"""Return the list of all models in at least one auto class."""
result = set() # To avoid duplicates we concatenate all model classes in a set.
if is_torch_available():
for attr_name in dir(diffusers.models.auto.modeling_auto):
if attr_name.startswith("MODEL_") and attr_name.endswith("MAPPING_NAMES"):
result = result | set(get_values(getattr(diffusers.models.auto.modeling_auto, attr_name)))
if is_tf_available():
for attr_name in dir(diffusers.models.auto.modeling_tf_auto):
if attr_name.startswith("TF_MODEL_") and attr_name.endswith("MAPPING_NAMES"):
result = result | set(get_values(getattr(diffusers.models.auto.modeling_tf_auto, attr_name)))
if is_flax_available():
for attr_name in dir(diffusers.models.auto.modeling_flax_auto):
if attr_name.startswith("FLAX_MODEL_") and attr_name.endswith("MAPPING_NAMES"):
result = result | set(get_values(getattr(diffusers.models.auto.modeling_flax_auto, attr_name)))
return list(result)
def ignore_unautoclassed(model_name):
"""Rules to determine if `name` should be in an auto class."""
# Special white list
if model_name in IGNORE_NON_AUTO_CONFIGURED:
return True
# Encoder and Decoder should be ignored
if "Encoder" in model_name or "Decoder" in model_name:
return True
return False
def check_models_are_auto_configured(module, all_auto_models):
"""Check models defined in module are each in an auto class."""
defined_models = get_models(module)
failures = []
for model_name, _ in defined_models:
if model_name not in all_auto_models and not ignore_unautoclassed(model_name):
failures.append(
f"{model_name} is defined in {module.__name__} but is not present in any of the auto mapping. "
"If that is intended behavior, add its name to `IGNORE_NON_AUTO_CONFIGURED` in the file "
"`utils/check_repo.py`."
)
return failures
def check_all_models_are_auto_configured():
"""Check all models are each in an auto class."""
missing_backends = []
if not is_torch_available():
missing_backends.append("PyTorch")
if not is_tf_available():
missing_backends.append("TensorFlow")
if not is_flax_available():
missing_backends.append("Flax")
if len(missing_backends) > 0:
missing = ", ".join(missing_backends)
if os.getenv("TRANSFORMERS_IS_CI", "").upper() in ENV_VARS_TRUE_VALUES:
raise Exception(
"Full quality checks require all backends to be installed (with `pip install -e .[dev]` in the "
f"Transformers repo, the following are missing: {missing}."
)
else:
warnings.warn(
"Full quality checks require all backends to be installed (with `pip install -e .[dev]` in the "
f"Transformers repo, the following are missing: {missing}. While it's probably fine as long as you "
"didn't make any change in one of those backends modeling files, you should probably execute the "
"command above to be on the safe side."
)
modules = get_model_modules()
all_auto_models = get_all_auto_configured_models()
failures = []
for module in modules:
new_failures = check_models_are_auto_configured(module, all_auto_models)
if new_failures is not None:
failures += new_failures
if len(failures) > 0:
raise Exception(f"There were {len(failures)} failures:\n" + "\n".join(failures))
_re_decorator = re.compile(r"^\s*@(\S+)\s+$")
def check_decorator_order(filename):
"""Check that in the test file `filename` the slow decorator is always last."""
with open(filename, "r", encoding="utf-8", newline="\n") as f:
lines = f.readlines()
decorator_before = None
errors = []
for i, line in enumerate(lines):
search = _re_decorator.search(line)
if search is not None:
decorator_name = search.groups()[0]
if decorator_before is not None and decorator_name.startswith("parameterized"):
errors.append(i)
decorator_before = decorator_name
elif decorator_before is not None:
decorator_before = None
return errors
def check_all_decorator_order():
"""Check that in all test files, the slow decorator is always last."""
errors = []
for fname in os.listdir(PATH_TO_TESTS):
if fname.endswith(".py"):
filename = os.path.join(PATH_TO_TESTS, fname)
new_errors = check_decorator_order(filename)
errors += [f"- {filename}, line {i}" for i in new_errors]
if len(errors) > 0:
msg = "\n".join(errors)
raise ValueError(
"The parameterized decorator (and its variants) should always be first, but this is not the case in the"
f" following files:\n{msg}"
)
def find_all_documented_objects():
"""Parse the content of all doc files to detect which classes and functions it documents"""
documented_obj = []
for doc_file in Path(PATH_TO_DOC).glob("**/*.rst"):
with open(doc_file, "r", encoding="utf-8", newline="\n") as f:
content = f.read()
raw_doc_objs = re.findall(r"(?:autoclass|autofunction):: transformers.(\S+)\s+", content)
documented_obj += [obj.split(".")[-1] for obj in raw_doc_objs]
for doc_file in Path(PATH_TO_DOC).glob("**/*.md"):
with open(doc_file, "r", encoding="utf-8", newline="\n") as f:
content = f.read()
raw_doc_objs = re.findall("\[\[autodoc\]\]\s+(\S+)\s+", content)
documented_obj += [obj.split(".")[-1] for obj in raw_doc_objs]
return documented_obj
# One good reason for not being documented is to be deprecated. Put in this list deprecated objects.
DEPRECATED_OBJECTS = [
"AutoModelWithLMHead",
"BartPretrainedModel",
"DataCollator",
"DataCollatorForSOP",
"GlueDataset",
"GlueDataTrainingArguments",
"LineByLineTextDataset",
"LineByLineWithRefDataset",
"LineByLineWithSOPTextDataset",
"PretrainedBartModel",
"PretrainedFSMTModel",
"SingleSentenceClassificationProcessor",
"SquadDataTrainingArguments",
"SquadDataset",
"SquadExample",
"SquadFeatures",
"SquadV1Processor",
"SquadV2Processor",
"TFAutoModelWithLMHead",
"TFBartPretrainedModel",
"TextDataset",
"TextDatasetForNextSentencePrediction",
"Wav2Vec2ForMaskedLM",
"Wav2Vec2Tokenizer",
"glue_compute_metrics",
"glue_convert_examples_to_features",
"glue_output_modes",
"glue_processors",
"glue_tasks_num_labels",
"squad_convert_examples_to_features",
"xnli_compute_metrics",
"xnli_output_modes",
"xnli_processors",
"xnli_tasks_num_labels",
"TFTrainer",
"TFTrainingArguments",
]
# Exceptionally, some objects should not be documented after all rules passed.
# ONLY PUT SOMETHING IN THIS LIST AS A LAST RESORT!
UNDOCUMENTED_OBJECTS = [
"AddedToken", # This is a tokenizers class.
"BasicTokenizer", # Internal, should never have been in the main init.
"CharacterTokenizer", # Internal, should never have been in the main init.
"DPRPretrainedReader", # Like an Encoder.
"DummyObject", # Just picked by mistake sometimes.
"MecabTokenizer", # Internal, should never have been in the main init.
"ModelCard", # Internal type.
"SqueezeBertModule", # Internal building block (should have been called SqueezeBertLayer)
"TFDPRPretrainedReader", # Like an Encoder.
"TransfoXLCorpus", # Internal type.
"WordpieceTokenizer", # Internal, should never have been in the main init.
"absl", # External module
"add_end_docstrings", # Internal, should never have been in the main init.
"add_start_docstrings", # Internal, should never have been in the main init.
"cached_path", # Internal used for downloading models.
"convert_tf_weight_name_to_pt_weight_name", # Internal used to convert model weights
"logger", # Internal logger
"logging", # External module
"requires_backends", # Internal function
]
# This list should be empty. Objects in it should get their own doc page.
SHOULD_HAVE_THEIR_OWN_PAGE = [
# Benchmarks
"PyTorchBenchmark",
"PyTorchBenchmarkArguments",
"TensorFlowBenchmark",
"TensorFlowBenchmarkArguments",
]
def ignore_undocumented(name):
"""Rules to determine if `name` should be undocumented."""
# NOT DOCUMENTED ON PURPOSE.
# Constants uppercase are not documented.
if name.isupper():
return True
# ModelMixins / Encoders / Decoders / Layers / Embeddings / Attention are not documented.
if (
name.endswith("ModelMixin")
or name.endswith("Decoder")
or name.endswith("Encoder")
or name.endswith("Layer")
or name.endswith("Embeddings")
or name.endswith("Attention")
):
return True
# Submodules are not documented.
if os.path.isdir(os.path.join(PATH_TO_DIFFUSERS, name)) or os.path.isfile(
os.path.join(PATH_TO_DIFFUSERS, f"{name}.py")
):
return True
# All load functions are not documented.
if name.startswith("load_tf") or name.startswith("load_pytorch"):
return True
# is_xxx_available functions are not documented.
if name.startswith("is_") and name.endswith("_available"):
return True
# Deprecated objects are not documented.
if name in DEPRECATED_OBJECTS or name in UNDOCUMENTED_OBJECTS:
return True
# MMBT model does not really work.
if name.startswith("MMBT"):
return True
if name in SHOULD_HAVE_THEIR_OWN_PAGE:
return True
return False
def check_all_objects_are_documented():
"""Check all models are properly documented."""
documented_objs = find_all_documented_objects()
modules = diffusers._modules
objects = [c for c in dir(diffusers) if c not in modules and not c.startswith("_")]
undocumented_objs = [c for c in objects if c not in documented_objs and not ignore_undocumented(c)]
if len(undocumented_objs) > 0:
raise Exception(
"The following objects are in the public init so should be documented:\n - "
+ "\n - ".join(undocumented_objs)
)
check_docstrings_are_in_md()
check_model_type_doc_match()
def check_model_type_doc_match():
"""Check all doc pages have a corresponding model type."""
model_doc_folder = Path(PATH_TO_DOC) / "model_doc"
model_docs = [m.stem for m in model_doc_folder.glob("*.md")]
model_types = list(diffusers.models.auto.configuration_auto.MODEL_NAMES_MAPPING.keys())
model_types = [MODEL_TYPE_TO_DOC_MAPPING[m] if m in MODEL_TYPE_TO_DOC_MAPPING else m for m in model_types]
errors = []
for m in model_docs:
if m not in model_types and m != "auto":
close_matches = get_close_matches(m, model_types)
error_message = f"{m} is not a proper model identifier."
if len(close_matches) > 0:
close_matches = "/".join(close_matches)
error_message += f" Did you mean {close_matches}?"
errors.append(error_message)
if len(errors) > 0:
raise ValueError(
"Some model doc pages do not match any existing model type:\n"
+ "\n".join(errors)
+ "\nYou can add any missing model type to the `MODEL_NAMES_MAPPING` constant in "
"models/auto/configuration_auto.py."
)
# Re pattern to catch :obj:`xx`, :class:`xx`, :func:`xx` or :meth:`xx`.
_re_rst_special_words = re.compile(r":(?:obj|func|class|meth):`([^`]+)`")
# Re pattern to catch things between double backquotes.
_re_double_backquotes = re.compile(r"(^|[^`])``([^`]+)``([^`]|$)")
# Re pattern to catch example introduction.
_re_rst_example = re.compile(r"^\s*Example.*::\s*$", flags=re.MULTILINE)
def is_rst_docstring(docstring):
"""
Returns `True` if `docstring` is written in rst.
"""
if _re_rst_special_words.search(docstring) is not None:
return True
if _re_double_backquotes.search(docstring) is not None:
return True
if _re_rst_example.search(docstring) is not None:
return True
return False
def check_docstrings_are_in_md():
"""Check all docstrings are in md"""
files_with_rst = []
for file in Path(PATH_TO_DIFFUSERS).glob("**/*.py"):
with open(file, "r") as f:
code = f.read()
docstrings = code.split('"""')
for idx, docstring in enumerate(docstrings):
if idx % 2 == 0 or not is_rst_docstring(docstring):
continue
files_with_rst.append(file)
break
if len(files_with_rst) > 0:
raise ValueError(
"The following files have docstrings written in rst:\n"
+ "\n".join([f"- {f}" for f in files_with_rst])
+ "\nTo fix this run `doc-builder convert path_to_py_file` after installing `doc-builder`\n"
"(`pip install git+https://github.com/huggingface/doc-builder`)"
)
def check_repo_quality():
"""Check all models are properly tested and documented."""
print("Checking all models are included.")
check_model_list()
print("Checking all models are public.")
check_models_are_in_init()
print("Checking all models are properly tested.")
check_all_decorator_order()
check_all_models_are_tested()
print("Checking all objects are properly documented.")
check_all_objects_are_documented()
print("Checking all models are in at least one auto class.")
check_all_models_are_auto_configured()
if __name__ == "__main__":
check_repo_quality()
| 0 |
hf_public_repos/diffusers | hf_public_repos/diffusers/utils/check_dummies.py | # coding=utf-8
# Copyright 2023 The HuggingFace Inc. team.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import argparse
import os
import re
# All paths are set with the intent you should run this script from the root of the repo with the command
# python utils/check_dummies.py
PATH_TO_DIFFUSERS = "src/diffusers"
# Matches is_xxx_available()
_re_backend = re.compile(r"is\_([a-z_]*)_available\(\)")
# Matches from xxx import bla
_re_single_line_import = re.compile(r"\s+from\s+\S*\s+import\s+([^\(\s].*)\n")
DUMMY_CONSTANT = """
{0} = None
"""
DUMMY_CLASS = """
class {0}(metaclass=DummyObject):
_backends = {1}
def __init__(self, *args, **kwargs):
requires_backends(self, {1})
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, {1})
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, {1})
"""
DUMMY_FUNCTION = """
def {0}(*args, **kwargs):
requires_backends({0}, {1})
"""
def find_backend(line):
"""Find one (or multiple) backend in a code line of the init."""
backends = _re_backend.findall(line)
if len(backends) == 0:
return None
return "_and_".join(backends)
def read_init():
"""Read the init and extracts PyTorch, TensorFlow, SentencePiece and Tokenizers objects."""
with open(os.path.join(PATH_TO_DIFFUSERS, "__init__.py"), "r", encoding="utf-8", newline="\n") as f:
lines = f.readlines()
# Get to the point we do the actual imports for type checking
line_index = 0
backend_specific_objects = {}
# Go through the end of the file
while line_index < len(lines):
# If the line contains is_backend_available, we grab all objects associated with the `else` block
backend = find_backend(lines[line_index])
if backend is not None:
while not lines[line_index].startswith("else:"):
line_index += 1
line_index += 1
objects = []
# Until we unindent, add backend objects to the list
while line_index < len(lines) and len(lines[line_index]) > 1:
line = lines[line_index]
single_line_import_search = _re_single_line_import.search(line)
if single_line_import_search is not None:
objects.extend(single_line_import_search.groups()[0].split(", "))
elif line.startswith(" " * 8):
objects.append(line[8:-2])
line_index += 1
if len(objects) > 0:
backend_specific_objects[backend] = objects
else:
line_index += 1
return backend_specific_objects
def create_dummy_object(name, backend_name):
"""Create the code for the dummy object corresponding to `name`."""
if name.isupper():
return DUMMY_CONSTANT.format(name)
elif name.islower():
return DUMMY_FUNCTION.format(name, backend_name)
else:
return DUMMY_CLASS.format(name, backend_name)
def create_dummy_files(backend_specific_objects=None):
"""Create the content of the dummy files."""
if backend_specific_objects is None:
backend_specific_objects = read_init()
# For special correspondence backend to module name as used in the function requires_modulename
dummy_files = {}
for backend, objects in backend_specific_objects.items():
backend_name = "[" + ", ".join(f'"{b}"' for b in backend.split("_and_")) + "]"
dummy_file = "# This file is autogenerated by the command `make fix-copies`, do not edit.\n"
dummy_file += "from ..utils import DummyObject, requires_backends\n\n"
dummy_file += "\n".join([create_dummy_object(o, backend_name) for o in objects])
dummy_files[backend] = dummy_file
return dummy_files
def check_dummies(overwrite=False):
"""Check if the dummy files are up to date and maybe `overwrite` with the right content."""
dummy_files = create_dummy_files()
# For special correspondence backend to shortcut as used in utils/dummy_xxx_objects.py
short_names = {"torch": "pt"}
# Locate actual dummy modules and read their content.
path = os.path.join(PATH_TO_DIFFUSERS, "utils")
dummy_file_paths = {
backend: os.path.join(path, f"dummy_{short_names.get(backend, backend)}_objects.py")
for backend in dummy_files.keys()
}
actual_dummies = {}
for backend, file_path in dummy_file_paths.items():
if os.path.isfile(file_path):
with open(file_path, "r", encoding="utf-8", newline="\n") as f:
actual_dummies[backend] = f.read()
else:
actual_dummies[backend] = ""
for backend in dummy_files.keys():
if dummy_files[backend] != actual_dummies[backend]:
if overwrite:
print(
f"Updating diffusers.utils.dummy_{short_names.get(backend, backend)}_objects.py as the main "
"__init__ has new objects."
)
with open(dummy_file_paths[backend], "w", encoding="utf-8", newline="\n") as f:
f.write(dummy_files[backend])
else:
raise ValueError(
"The main __init__ has objects that are not present in "
f"diffusers.utils.dummy_{short_names.get(backend, backend)}_objects.py. Run `make fix-copies` "
"to fix this."
)
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument("--fix_and_overwrite", action="store_true", help="Whether to fix inconsistencies.")
args = parser.parse_args()
check_dummies(args.fix_and_overwrite)
| 0 |
hf_public_repos/diffusers | hf_public_repos/diffusers/utils/check_config_docstrings.py | # coding=utf-8
# Copyright 2023 The HuggingFace Inc. team.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import importlib
import inspect
import os
import re
# All paths are set with the intent you should run this script from the root of the repo with the command
# python utils/check_config_docstrings.py
PATH_TO_TRANSFORMERS = "src/transformers"
# This is to make sure the transformers module imported is the one in the repo.
spec = importlib.util.spec_from_file_location(
"transformers",
os.path.join(PATH_TO_TRANSFORMERS, "__init__.py"),
submodule_search_locations=[PATH_TO_TRANSFORMERS],
)
transformers = spec.loader.load_module()
CONFIG_MAPPING = transformers.models.auto.configuration_auto.CONFIG_MAPPING
# Regex pattern used to find the checkpoint mentioned in the docstring of `config_class`.
# For example, `[bert-base-uncased](https://huggingface.co/bert-base-uncased)`
_re_checkpoint = re.compile("\[(.+?)\]\((https://huggingface\.co/.+?)\)")
CONFIG_CLASSES_TO_IGNORE_FOR_DOCSTRING_CHECKPOINT_CHECK = {
"CLIPConfigMixin",
"DecisionTransformerConfigMixin",
"EncoderDecoderConfigMixin",
"RagConfigMixin",
"SpeechEncoderDecoderConfigMixin",
"VisionEncoderDecoderConfigMixin",
"VisionTextDualEncoderConfigMixin",
}
def check_config_docstrings_have_checkpoints():
configs_without_checkpoint = []
for config_class in list(CONFIG_MAPPING.values()):
checkpoint_found = False
# source code of `config_class`
config_source = inspect.getsource(config_class)
checkpoints = _re_checkpoint.findall(config_source)
for checkpoint in checkpoints:
# Each `checkpoint` is a tuple of a checkpoint name and a checkpoint link.
# For example, `('bert-base-uncased', 'https://huggingface.co/bert-base-uncased')`
ckpt_name, ckpt_link = checkpoint
# verify the checkpoint name corresponds to the checkpoint link
ckpt_link_from_name = f"https://huggingface.co/{ckpt_name}"
if ckpt_link == ckpt_link_from_name:
checkpoint_found = True
break
name = config_class.__name__
if not checkpoint_found and name not in CONFIG_CLASSES_TO_IGNORE_FOR_DOCSTRING_CHECKPOINT_CHECK:
configs_without_checkpoint.append(name)
if len(configs_without_checkpoint) > 0:
message = "\n".join(sorted(configs_without_checkpoint))
raise ValueError(f"The following configurations don't contain any valid checkpoint:\n{message}")
if __name__ == "__main__":
check_config_docstrings_have_checkpoints()
| 0 |
hf_public_repos/diffusers | hf_public_repos/diffusers/utils/check_table.py | # coding=utf-8
# Copyright 2023 The HuggingFace Inc. team.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import argparse
import collections
import importlib.util
import os
import re
# All paths are set with the intent you should run this script from the root of the repo with the command
# python utils/check_table.py
TRANSFORMERS_PATH = "src/diffusers"
PATH_TO_DOCS = "docs/source/en"
REPO_PATH = "."
def _find_text_in_file(filename, start_prompt, end_prompt):
"""
Find the text in `filename` between a line beginning with `start_prompt` and before `end_prompt`, removing empty
lines.
"""
with open(filename, "r", encoding="utf-8", newline="\n") as f:
lines = f.readlines()
# Find the start prompt.
start_index = 0
while not lines[start_index].startswith(start_prompt):
start_index += 1
start_index += 1
end_index = start_index
while not lines[end_index].startswith(end_prompt):
end_index += 1
end_index -= 1
while len(lines[start_index]) <= 1:
start_index += 1
while len(lines[end_index]) <= 1:
end_index -= 1
end_index += 1
return "".join(lines[start_index:end_index]), start_index, end_index, lines
# Add here suffixes that are used to identify models, separated by |
ALLOWED_MODEL_SUFFIXES = "Model|Encoder|Decoder|ForConditionalGeneration"
# Regexes that match TF/Flax/PT model names.
_re_tf_models = re.compile(r"TF(.*)(?:Model|Encoder|Decoder|ForConditionalGeneration)")
_re_flax_models = re.compile(r"Flax(.*)(?:Model|Encoder|Decoder|ForConditionalGeneration)")
# Will match any TF or Flax model too so need to be in an else branch afterthe two previous regexes.
_re_pt_models = re.compile(r"(.*)(?:Model|Encoder|Decoder|ForConditionalGeneration)")
# This is to make sure the diffusers module imported is the one in the repo.
spec = importlib.util.spec_from_file_location(
"diffusers",
os.path.join(TRANSFORMERS_PATH, "__init__.py"),
submodule_search_locations=[TRANSFORMERS_PATH],
)
diffusers_module = spec.loader.load_module()
# Thanks to https://stackoverflow.com/questions/29916065/how-to-do-camelcase-split-in-python
def camel_case_split(identifier):
"Split a camelcased `identifier` into words."
matches = re.finditer(".+?(?:(?<=[a-z])(?=[A-Z])|(?<=[A-Z])(?=[A-Z][a-z])|$)", identifier)
return [m.group(0) for m in matches]
def _center_text(text, width):
text_length = 2 if text == "✅" or text == "❌" else len(text)
left_indent = (width - text_length) // 2
right_indent = width - text_length - left_indent
return " " * left_indent + text + " " * right_indent
def get_model_table_from_auto_modules():
"""Generates an up-to-date model table from the content of the auto modules."""
# Dictionary model names to config.
config_mapping_names = diffusers_module.models.auto.configuration_auto.CONFIG_MAPPING_NAMES
model_name_to_config = {
name: config_mapping_names[code]
for code, name in diffusers_module.MODEL_NAMES_MAPPING.items()
if code in config_mapping_names
}
model_name_to_prefix = {name: config.replace("ConfigMixin", "") for name, config in model_name_to_config.items()}
# Dictionaries flagging if each model prefix has a slow/fast tokenizer, backend in PT/TF/Flax.
slow_tokenizers = collections.defaultdict(bool)
fast_tokenizers = collections.defaultdict(bool)
pt_models = collections.defaultdict(bool)
tf_models = collections.defaultdict(bool)
flax_models = collections.defaultdict(bool)
# Let's lookup through all diffusers object (once).
for attr_name in dir(diffusers_module):
lookup_dict = None
if attr_name.endswith("Tokenizer"):
lookup_dict = slow_tokenizers
attr_name = attr_name[:-9]
elif attr_name.endswith("TokenizerFast"):
lookup_dict = fast_tokenizers
attr_name = attr_name[:-13]
elif _re_tf_models.match(attr_name) is not None:
lookup_dict = tf_models
attr_name = _re_tf_models.match(attr_name).groups()[0]
elif _re_flax_models.match(attr_name) is not None:
lookup_dict = flax_models
attr_name = _re_flax_models.match(attr_name).groups()[0]
elif _re_pt_models.match(attr_name) is not None:
lookup_dict = pt_models
attr_name = _re_pt_models.match(attr_name).groups()[0]
if lookup_dict is not None:
while len(attr_name) > 0:
if attr_name in model_name_to_prefix.values():
lookup_dict[attr_name] = True
break
# Try again after removing the last word in the name
attr_name = "".join(camel_case_split(attr_name)[:-1])
# Let's build that table!
model_names = list(model_name_to_config.keys())
model_names.sort(key=str.lower)
columns = ["Model", "Tokenizer slow", "Tokenizer fast", "PyTorch support", "TensorFlow support", "Flax Support"]
# We'll need widths to properly display everything in the center (+2 is to leave one extra space on each side).
widths = [len(c) + 2 for c in columns]
widths[0] = max([len(name) for name in model_names]) + 2
# Build the table per se
table = "|" + "|".join([_center_text(c, w) for c, w in zip(columns, widths)]) + "|\n"
# Use ":-----:" format to center-aligned table cell texts
table += "|" + "|".join([":" + "-" * (w - 2) + ":" for w in widths]) + "|\n"
check = {True: "✅", False: "❌"}
for name in model_names:
prefix = model_name_to_prefix[name]
line = [
name,
check[slow_tokenizers[prefix]],
check[fast_tokenizers[prefix]],
check[pt_models[prefix]],
check[tf_models[prefix]],
check[flax_models[prefix]],
]
table += "|" + "|".join([_center_text(l, w) for l, w in zip(line, widths)]) + "|\n"
return table
def check_model_table(overwrite=False):
"""Check the model table in the index.rst is consistent with the state of the lib and maybe `overwrite`."""
current_table, start_index, end_index, lines = _find_text_in_file(
filename=os.path.join(PATH_TO_DOCS, "index.md"),
start_prompt="<!--This table is updated automatically from the auto modules",
end_prompt="<!-- End table-->",
)
new_table = get_model_table_from_auto_modules()
if current_table != new_table:
if overwrite:
with open(os.path.join(PATH_TO_DOCS, "index.md"), "w", encoding="utf-8", newline="\n") as f:
f.writelines(lines[:start_index] + [new_table] + lines[end_index:])
else:
raise ValueError(
"The model table in the `index.md` has not been updated. Run `make fix-copies` to fix this."
)
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument("--fix_and_overwrite", action="store_true", help="Whether to fix inconsistencies.")
args = parser.parse_args()
check_model_table(args.fix_and_overwrite)
| 0 |
hf_public_repos/diffusers | hf_public_repos/diffusers/scripts/change_naming_configs_and_checkpoints.py | # coding=utf-8
# Copyright 2023 The HuggingFace Inc. team.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
""" Conversion script for the LDM checkpoints. """
import argparse
import json
import os
import torch
from transformers.file_utils import has_file
from diffusers import UNet2DConditionModel, UNet2DModel
do_only_config = False
do_only_weights = True
do_only_renaming = False
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument(
"--repo_path",
default=None,
type=str,
required=True,
help="The config json file corresponding to the architecture.",
)
parser.add_argument("--dump_path", default=None, type=str, required=True, help="Path to the output model.")
args = parser.parse_args()
config_parameters_to_change = {
"image_size": "sample_size",
"num_res_blocks": "layers_per_block",
"block_channels": "block_out_channels",
"down_blocks": "down_block_types",
"up_blocks": "up_block_types",
"downscale_freq_shift": "freq_shift",
"resnet_num_groups": "norm_num_groups",
"resnet_act_fn": "act_fn",
"resnet_eps": "norm_eps",
"num_head_channels": "attention_head_dim",
}
key_parameters_to_change = {
"time_steps": "time_proj",
"mid": "mid_block",
"downsample_blocks": "down_blocks",
"upsample_blocks": "up_blocks",
}
subfolder = "" if has_file(args.repo_path, "config.json") else "unet"
with open(os.path.join(args.repo_path, subfolder, "config.json"), "r", encoding="utf-8") as reader:
text = reader.read()
config = json.loads(text)
if do_only_config:
for key in config_parameters_to_change.keys():
config.pop(key, None)
if has_file(args.repo_path, "config.json"):
model = UNet2DModel(**config)
else:
class_name = UNet2DConditionModel if "ldm-text2im-large-256" in args.repo_path else UNet2DModel
model = class_name(**config)
if do_only_config:
model.save_config(os.path.join(args.repo_path, subfolder))
config = dict(model.config)
if do_only_renaming:
for key, value in config_parameters_to_change.items():
if key in config:
config[value] = config[key]
del config[key]
config["down_block_types"] = [k.replace("UNetRes", "") for k in config["down_block_types"]]
config["up_block_types"] = [k.replace("UNetRes", "") for k in config["up_block_types"]]
if do_only_weights:
state_dict = torch.load(os.path.join(args.repo_path, subfolder, "diffusion_pytorch_model.bin"))
new_state_dict = {}
for param_key, param_value in state_dict.items():
if param_key.endswith(".op.bias") or param_key.endswith(".op.weight"):
continue
has_changed = False
for key, new_key in key_parameters_to_change.items():
if not has_changed and param_key.split(".")[0] == key:
new_state_dict[".".join([new_key] + param_key.split(".")[1:])] = param_value
has_changed = True
if not has_changed:
new_state_dict[param_key] = param_value
model.load_state_dict(new_state_dict)
model.save_pretrained(os.path.join(args.repo_path, subfolder))
| 0 |
hf_public_repos/diffusers | hf_public_repos/diffusers/scripts/convert_original_controlnet_to_diffusers.py | # coding=utf-8
# Copyright 2023 The HuggingFace Inc. team.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
""" Conversion script for stable diffusion checkpoints which _only_ contain a contrlnet. """
import argparse
from diffusers.pipelines.stable_diffusion.convert_from_ckpt import download_controlnet_from_original_ckpt
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument(
"--checkpoint_path", default=None, type=str, required=True, help="Path to the checkpoint to convert."
)
parser.add_argument(
"--original_config_file",
type=str,
required=True,
help="The YAML config file corresponding to the original architecture.",
)
parser.add_argument(
"--num_in_channels",
default=None,
type=int,
help="The number of input channels. If `None` number of input channels will be automatically inferred.",
)
parser.add_argument(
"--image_size",
default=512,
type=int,
help=(
"The image size that the model was trained on. Use 512 for Stable Diffusion v1.X and Stable Siffusion v2"
" Base. Use 768 for Stable Diffusion v2."
),
)
parser.add_argument(
"--extract_ema",
action="store_true",
help=(
"Only relevant for checkpoints that have both EMA and non-EMA weights. Whether to extract the EMA weights"
" or not. Defaults to `False`. Add `--extract_ema` to extract the EMA weights. EMA weights usually yield"
" higher quality images for inference. Non-EMA weights are usually better to continue fine-tuning."
),
)
parser.add_argument(
"--upcast_attention",
action="store_true",
help=(
"Whether the attention computation should always be upcasted. This is necessary when running stable"
" diffusion 2.1."
),
)
parser.add_argument(
"--from_safetensors",
action="store_true",
help="If `--checkpoint_path` is in `safetensors` format, load checkpoint with safetensors instead of PyTorch.",
)
parser.add_argument(
"--to_safetensors",
action="store_true",
help="Whether to store pipeline in safetensors format or not.",
)
parser.add_argument("--dump_path", default=None, type=str, required=True, help="Path to the output model.")
parser.add_argument("--device", type=str, help="Device to use (e.g. cpu, cuda:0, cuda:1, etc.)")
# small workaround to get argparser to parse a boolean input as either true _or_ false
def parse_bool(string):
if string == "True":
return True
elif string == "False":
return False
else:
raise ValueError(f"could not parse string as bool {string}")
parser.add_argument(
"--use_linear_projection", help="Override for use linear projection", required=False, type=parse_bool
)
parser.add_argument("--cross_attention_dim", help="Override for cross attention_dim", required=False, type=int)
args = parser.parse_args()
controlnet = download_controlnet_from_original_ckpt(
checkpoint_path=args.checkpoint_path,
original_config_file=args.original_config_file,
image_size=args.image_size,
extract_ema=args.extract_ema,
num_in_channels=args.num_in_channels,
upcast_attention=args.upcast_attention,
from_safetensors=args.from_safetensors,
device=args.device,
use_linear_projection=args.use_linear_projection,
cross_attention_dim=args.cross_attention_dim,
)
controlnet.save_pretrained(args.dump_path, safe_serialization=args.to_safetensors)
| 0 |
hf_public_repos/diffusers | hf_public_repos/diffusers/scripts/convert_versatile_diffusion_to_diffusers.py | # coding=utf-8
# Copyright 2023 The HuggingFace Inc. team.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
""" Conversion script for the Versatile Stable Diffusion checkpoints. """
import argparse
from argparse import Namespace
import torch
from transformers import (
CLIPImageProcessor,
CLIPTextModelWithProjection,
CLIPTokenizer,
CLIPVisionModelWithProjection,
)
from diffusers import (
AutoencoderKL,
DDIMScheduler,
DPMSolverMultistepScheduler,
EulerAncestralDiscreteScheduler,
EulerDiscreteScheduler,
LMSDiscreteScheduler,
PNDMScheduler,
UNet2DConditionModel,
VersatileDiffusionPipeline,
)
from diffusers.pipelines.versatile_diffusion.modeling_text_unet import UNetFlatConditionModel
SCHEDULER_CONFIG = Namespace(
**{
"beta_linear_start": 0.00085,
"beta_linear_end": 0.012,
"timesteps": 1000,
"scale_factor": 0.18215,
}
)
IMAGE_UNET_CONFIG = Namespace(
**{
"input_channels": 4,
"model_channels": 320,
"output_channels": 4,
"num_noattn_blocks": [2, 2, 2, 2],
"channel_mult": [1, 2, 4, 4],
"with_attn": [True, True, True, False],
"num_heads": 8,
"context_dim": 768,
"use_checkpoint": True,
}
)
TEXT_UNET_CONFIG = Namespace(
**{
"input_channels": 768,
"model_channels": 320,
"output_channels": 768,
"num_noattn_blocks": [2, 2, 2, 2],
"channel_mult": [1, 2, 4, 4],
"second_dim": [4, 4, 4, 4],
"with_attn": [True, True, True, False],
"num_heads": 8,
"context_dim": 768,
"use_checkpoint": True,
}
)
AUTOENCODER_CONFIG = Namespace(
**{
"double_z": True,
"z_channels": 4,
"resolution": 256,
"in_channels": 3,
"out_ch": 3,
"ch": 128,
"ch_mult": [1, 2, 4, 4],
"num_res_blocks": 2,
"attn_resolutions": [],
"dropout": 0.0,
}
)
def shave_segments(path, n_shave_prefix_segments=1):
"""
Removes segments. Positive values shave the first segments, negative shave the last segments.
"""
if n_shave_prefix_segments >= 0:
return ".".join(path.split(".")[n_shave_prefix_segments:])
else:
return ".".join(path.split(".")[:n_shave_prefix_segments])
def renew_resnet_paths(old_list, n_shave_prefix_segments=0):
"""
Updates paths inside resnets to the new naming scheme (local renaming)
"""
mapping = []
for old_item in old_list:
new_item = old_item.replace("in_layers.0", "norm1")
new_item = new_item.replace("in_layers.2", "conv1")
new_item = new_item.replace("out_layers.0", "norm2")
new_item = new_item.replace("out_layers.3", "conv2")
new_item = new_item.replace("emb_layers.1", "time_emb_proj")
new_item = new_item.replace("skip_connection", "conv_shortcut")
new_item = shave_segments(new_item, n_shave_prefix_segments=n_shave_prefix_segments)
mapping.append({"old": old_item, "new": new_item})
return mapping
def renew_vae_resnet_paths(old_list, n_shave_prefix_segments=0):
"""
Updates paths inside resnets to the new naming scheme (local renaming)
"""
mapping = []
for old_item in old_list:
new_item = old_item
new_item = new_item.replace("nin_shortcut", "conv_shortcut")
new_item = shave_segments(new_item, n_shave_prefix_segments=n_shave_prefix_segments)
mapping.append({"old": old_item, "new": new_item})
return mapping
def renew_attention_paths(old_list, n_shave_prefix_segments=0):
"""
Updates paths inside attentions to the new naming scheme (local renaming)
"""
mapping = []
for old_item in old_list:
new_item = old_item
# new_item = new_item.replace('norm.weight', 'group_norm.weight')
# new_item = new_item.replace('norm.bias', 'group_norm.bias')
# new_item = new_item.replace('proj_out.weight', 'proj_attn.weight')
# new_item = new_item.replace('proj_out.bias', 'proj_attn.bias')
# new_item = shave_segments(new_item, n_shave_prefix_segments=n_shave_prefix_segments)
mapping.append({"old": old_item, "new": new_item})
return mapping
def renew_vae_attention_paths(old_list, n_shave_prefix_segments=0):
"""
Updates paths inside attentions to the new naming scheme (local renaming)
"""
mapping = []
for old_item in old_list:
new_item = old_item
new_item = new_item.replace("norm.weight", "group_norm.weight")
new_item = new_item.replace("norm.bias", "group_norm.bias")
new_item = new_item.replace("q.weight", "query.weight")
new_item = new_item.replace("q.bias", "query.bias")
new_item = new_item.replace("k.weight", "key.weight")
new_item = new_item.replace("k.bias", "key.bias")
new_item = new_item.replace("v.weight", "value.weight")
new_item = new_item.replace("v.bias", "value.bias")
new_item = new_item.replace("proj_out.weight", "proj_attn.weight")
new_item = new_item.replace("proj_out.bias", "proj_attn.bias")
new_item = shave_segments(new_item, n_shave_prefix_segments=n_shave_prefix_segments)
mapping.append({"old": old_item, "new": new_item})
return mapping
def assign_to_checkpoint(
paths, checkpoint, old_checkpoint, attention_paths_to_split=None, additional_replacements=None, config=None
):
"""
This does the final conversion step: take locally converted weights and apply a global renaming
to them. It splits attention layers, and takes into account additional replacements
that may arise.
Assigns the weights to the new checkpoint.
"""
assert isinstance(paths, list), "Paths should be a list of dicts containing 'old' and 'new' keys."
# Splits the attention layers into three variables.
if attention_paths_to_split is not None:
for path, path_map in attention_paths_to_split.items():
old_tensor = old_checkpoint[path]
channels = old_tensor.shape[0] // 3
target_shape = (-1, channels) if len(old_tensor.shape) == 3 else (-1)
num_heads = old_tensor.shape[0] // config["num_head_channels"] // 3
old_tensor = old_tensor.reshape((num_heads, 3 * channels // num_heads) + old_tensor.shape[1:])
query, key, value = old_tensor.split(channels // num_heads, dim=1)
checkpoint[path_map["query"]] = query.reshape(target_shape)
checkpoint[path_map["key"]] = key.reshape(target_shape)
checkpoint[path_map["value"]] = value.reshape(target_shape)
for path in paths:
new_path = path["new"]
# These have already been assigned
if attention_paths_to_split is not None and new_path in attention_paths_to_split:
continue
# Global renaming happens here
new_path = new_path.replace("middle_block.0", "mid_block.resnets.0")
new_path = new_path.replace("middle_block.1", "mid_block.attentions.0")
new_path = new_path.replace("middle_block.2", "mid_block.resnets.1")
if additional_replacements is not None:
for replacement in additional_replacements:
new_path = new_path.replace(replacement["old"], replacement["new"])
# proj_attn.weight has to be converted from conv 1D to linear
if "proj_attn.weight" in new_path:
checkpoint[new_path] = old_checkpoint[path["old"]][:, :, 0]
elif path["old"] in old_checkpoint:
checkpoint[new_path] = old_checkpoint[path["old"]]
def conv_attn_to_linear(checkpoint):
keys = list(checkpoint.keys())
attn_keys = ["query.weight", "key.weight", "value.weight"]
for key in keys:
if ".".join(key.split(".")[-2:]) in attn_keys:
if checkpoint[key].ndim > 2:
checkpoint[key] = checkpoint[key][:, :, 0, 0]
elif "proj_attn.weight" in key:
if checkpoint[key].ndim > 2:
checkpoint[key] = checkpoint[key][:, :, 0]
def create_image_unet_diffusers_config(unet_params):
"""
Creates a config for the diffusers based on the config of the VD model.
"""
block_out_channels = [unet_params.model_channels * mult for mult in unet_params.channel_mult]
down_block_types = []
resolution = 1
for i in range(len(block_out_channels)):
block_type = "CrossAttnDownBlock2D" if unet_params.with_attn[i] else "DownBlock2D"
down_block_types.append(block_type)
if i != len(block_out_channels) - 1:
resolution *= 2
up_block_types = []
for i in range(len(block_out_channels)):
block_type = "CrossAttnUpBlock2D" if unet_params.with_attn[-i - 1] else "UpBlock2D"
up_block_types.append(block_type)
resolution //= 2
if not all(n == unet_params.num_noattn_blocks[0] for n in unet_params.num_noattn_blocks):
raise ValueError("Not all num_res_blocks are equal, which is not supported in this script.")
config = {
"sample_size": None,
"in_channels": unet_params.input_channels,
"out_channels": unet_params.output_channels,
"down_block_types": tuple(down_block_types),
"up_block_types": tuple(up_block_types),
"block_out_channels": tuple(block_out_channels),
"layers_per_block": unet_params.num_noattn_blocks[0],
"cross_attention_dim": unet_params.context_dim,
"attention_head_dim": unet_params.num_heads,
}
return config
def create_text_unet_diffusers_config(unet_params):
"""
Creates a config for the diffusers based on the config of the VD model.
"""
block_out_channels = [unet_params.model_channels * mult for mult in unet_params.channel_mult]
down_block_types = []
resolution = 1
for i in range(len(block_out_channels)):
block_type = "CrossAttnDownBlockFlat" if unet_params.with_attn[i] else "DownBlockFlat"
down_block_types.append(block_type)
if i != len(block_out_channels) - 1:
resolution *= 2
up_block_types = []
for i in range(len(block_out_channels)):
block_type = "CrossAttnUpBlockFlat" if unet_params.with_attn[-i - 1] else "UpBlockFlat"
up_block_types.append(block_type)
resolution //= 2
if not all(n == unet_params.num_noattn_blocks[0] for n in unet_params.num_noattn_blocks):
raise ValueError("Not all num_res_blocks are equal, which is not supported in this script.")
config = {
"sample_size": None,
"in_channels": (unet_params.input_channels, 1, 1),
"out_channels": (unet_params.output_channels, 1, 1),
"down_block_types": tuple(down_block_types),
"up_block_types": tuple(up_block_types),
"block_out_channels": tuple(block_out_channels),
"layers_per_block": unet_params.num_noattn_blocks[0],
"cross_attention_dim": unet_params.context_dim,
"attention_head_dim": unet_params.num_heads,
}
return config
def create_vae_diffusers_config(vae_params):
"""
Creates a config for the diffusers based on the config of the VD model.
"""
block_out_channels = [vae_params.ch * mult for mult in vae_params.ch_mult]
down_block_types = ["DownEncoderBlock2D"] * len(block_out_channels)
up_block_types = ["UpDecoderBlock2D"] * len(block_out_channels)
config = {
"sample_size": vae_params.resolution,
"in_channels": vae_params.in_channels,
"out_channels": vae_params.out_ch,
"down_block_types": tuple(down_block_types),
"up_block_types": tuple(up_block_types),
"block_out_channels": tuple(block_out_channels),
"latent_channels": vae_params.z_channels,
"layers_per_block": vae_params.num_res_blocks,
}
return config
def create_diffusers_scheduler(original_config):
schedular = DDIMScheduler(
num_train_timesteps=original_config.model.params.timesteps,
beta_start=original_config.model.params.linear_start,
beta_end=original_config.model.params.linear_end,
beta_schedule="scaled_linear",
)
return schedular
def convert_vd_unet_checkpoint(checkpoint, config, unet_key, extract_ema=False):
"""
Takes a state dict and a config, and returns a converted checkpoint.
"""
# extract state_dict for UNet
unet_state_dict = {}
keys = list(checkpoint.keys())
# at least a 100 parameters have to start with `model_ema` in order for the checkpoint to be EMA
if sum(k.startswith("model_ema") for k in keys) > 100:
print("Checkpoint has both EMA and non-EMA weights.")
if extract_ema:
print(
"In this conversion only the EMA weights are extracted. If you want to instead extract the non-EMA"
" weights (useful to continue fine-tuning), please make sure to remove the `--extract_ema` flag."
)
for key in keys:
if key.startswith("model.diffusion_model"):
flat_ema_key = "model_ema." + "".join(key.split(".")[1:])
unet_state_dict[key.replace(unet_key, "")] = checkpoint.pop(flat_ema_key)
else:
print(
"In this conversion only the non-EMA weights are extracted. If you want to instead extract the EMA"
" weights (usually better for inference), please make sure to add the `--extract_ema` flag."
)
for key in keys:
if key.startswith(unet_key):
unet_state_dict[key.replace(unet_key, "")] = checkpoint.pop(key)
new_checkpoint = {}
new_checkpoint["time_embedding.linear_1.weight"] = checkpoint["model.diffusion_model.time_embed.0.weight"]
new_checkpoint["time_embedding.linear_1.bias"] = checkpoint["model.diffusion_model.time_embed.0.bias"]
new_checkpoint["time_embedding.linear_2.weight"] = checkpoint["model.diffusion_model.time_embed.2.weight"]
new_checkpoint["time_embedding.linear_2.bias"] = checkpoint["model.diffusion_model.time_embed.2.bias"]
new_checkpoint["conv_in.weight"] = unet_state_dict["input_blocks.0.0.weight"]
new_checkpoint["conv_in.bias"] = unet_state_dict["input_blocks.0.0.bias"]
new_checkpoint["conv_norm_out.weight"] = unet_state_dict["out.0.weight"]
new_checkpoint["conv_norm_out.bias"] = unet_state_dict["out.0.bias"]
new_checkpoint["conv_out.weight"] = unet_state_dict["out.2.weight"]
new_checkpoint["conv_out.bias"] = unet_state_dict["out.2.bias"]
# Retrieves the keys for the input blocks only
num_input_blocks = len({".".join(layer.split(".")[:2]) for layer in unet_state_dict if "input_blocks" in layer})
input_blocks = {
layer_id: [key for key in unet_state_dict if f"input_blocks.{layer_id}" in key]
for layer_id in range(num_input_blocks)
}
# Retrieves the keys for the middle blocks only
num_middle_blocks = len({".".join(layer.split(".")[:2]) for layer in unet_state_dict if "middle_block" in layer})
middle_blocks = {
layer_id: [key for key in unet_state_dict if f"middle_block.{layer_id}" in key]
for layer_id in range(num_middle_blocks)
}
# Retrieves the keys for the output blocks only
num_output_blocks = len({".".join(layer.split(".")[:2]) for layer in unet_state_dict if "output_blocks" in layer})
output_blocks = {
layer_id: [key for key in unet_state_dict if f"output_blocks.{layer_id}" in key]
for layer_id in range(num_output_blocks)
}
for i in range(1, num_input_blocks):
block_id = (i - 1) // (config["layers_per_block"] + 1)
layer_in_block_id = (i - 1) % (config["layers_per_block"] + 1)
resnets = [
key for key in input_blocks[i] if f"input_blocks.{i}.0" in key and f"input_blocks.{i}.0.op" not in key
]
attentions = [key for key in input_blocks[i] if f"input_blocks.{i}.1" in key]
if f"input_blocks.{i}.0.op.weight" in unet_state_dict:
new_checkpoint[f"down_blocks.{block_id}.downsamplers.0.conv.weight"] = unet_state_dict.pop(
f"input_blocks.{i}.0.op.weight"
)
new_checkpoint[f"down_blocks.{block_id}.downsamplers.0.conv.bias"] = unet_state_dict.pop(
f"input_blocks.{i}.0.op.bias"
)
elif f"input_blocks.{i}.0.weight" in unet_state_dict:
# text_unet uses linear layers in place of downsamplers
shape = unet_state_dict[f"input_blocks.{i}.0.weight"].shape
if shape[0] != shape[1]:
continue
new_checkpoint[f"down_blocks.{block_id}.downsamplers.0.weight"] = unet_state_dict.pop(
f"input_blocks.{i}.0.weight"
)
new_checkpoint[f"down_blocks.{block_id}.downsamplers.0.bias"] = unet_state_dict.pop(
f"input_blocks.{i}.0.bias"
)
paths = renew_resnet_paths(resnets)
meta_path = {"old": f"input_blocks.{i}.0", "new": f"down_blocks.{block_id}.resnets.{layer_in_block_id}"}
assign_to_checkpoint(
paths, new_checkpoint, unet_state_dict, additional_replacements=[meta_path], config=config
)
if len(attentions):
paths = renew_attention_paths(attentions)
meta_path = {"old": f"input_blocks.{i}.1", "new": f"down_blocks.{block_id}.attentions.{layer_in_block_id}"}
assign_to_checkpoint(
paths, new_checkpoint, unet_state_dict, additional_replacements=[meta_path], config=config
)
resnet_0 = middle_blocks[0]
attentions = middle_blocks[1]
resnet_1 = middle_blocks[2]
resnet_0_paths = renew_resnet_paths(resnet_0)
assign_to_checkpoint(resnet_0_paths, new_checkpoint, unet_state_dict, config=config)
resnet_1_paths = renew_resnet_paths(resnet_1)
assign_to_checkpoint(resnet_1_paths, new_checkpoint, unet_state_dict, config=config)
attentions_paths = renew_attention_paths(attentions)
meta_path = {"old": "middle_block.1", "new": "mid_block.attentions.0"}
assign_to_checkpoint(
attentions_paths, new_checkpoint, unet_state_dict, additional_replacements=[meta_path], config=config
)
for i in range(num_output_blocks):
block_id = i // (config["layers_per_block"] + 1)
layer_in_block_id = i % (config["layers_per_block"] + 1)
output_block_layers = [shave_segments(name, 2) for name in output_blocks[i]]
output_block_list = {}
for layer in output_block_layers:
layer_id, layer_name = layer.split(".")[0], shave_segments(layer, 1)
if layer_id in output_block_list:
output_block_list[layer_id].append(layer_name)
else:
output_block_list[layer_id] = [layer_name]
if len(output_block_list) > 1:
resnets = [key for key in output_blocks[i] if f"output_blocks.{i}.0" in key]
attentions = [key for key in output_blocks[i] if f"output_blocks.{i}.1" in key]
paths = renew_resnet_paths(resnets)
meta_path = {"old": f"output_blocks.{i}.0", "new": f"up_blocks.{block_id}.resnets.{layer_in_block_id}"}
assign_to_checkpoint(
paths, new_checkpoint, unet_state_dict, additional_replacements=[meta_path], config=config
)
if ["conv.weight", "conv.bias"] in output_block_list.values():
index = list(output_block_list.values()).index(["conv.weight", "conv.bias"])
new_checkpoint[f"up_blocks.{block_id}.upsamplers.0.conv.weight"] = unet_state_dict[
f"output_blocks.{i}.{index}.conv.weight"
]
new_checkpoint[f"up_blocks.{block_id}.upsamplers.0.conv.bias"] = unet_state_dict[
f"output_blocks.{i}.{index}.conv.bias"
]
# Clear attentions as they have been attributed above.
if len(attentions) == 2:
attentions = []
elif f"output_blocks.{i}.1.weight" in unet_state_dict:
# text_unet uses linear layers in place of upsamplers
shape = unet_state_dict[f"output_blocks.{i}.1.weight"].shape
if shape[0] != shape[1]:
continue
new_checkpoint[f"up_blocks.{block_id}.upsamplers.0.weight"] = unet_state_dict.pop(
f"output_blocks.{i}.1.weight"
)
new_checkpoint[f"up_blocks.{block_id}.upsamplers.0.bias"] = unet_state_dict.pop(
f"output_blocks.{i}.1.bias"
)
# Clear attentions as they have been attributed above.
if len(attentions) == 2:
attentions = []
elif f"output_blocks.{i}.2.weight" in unet_state_dict:
# text_unet uses linear layers in place of upsamplers
shape = unet_state_dict[f"output_blocks.{i}.2.weight"].shape
if shape[0] != shape[1]:
continue
new_checkpoint[f"up_blocks.{block_id}.upsamplers.0.weight"] = unet_state_dict.pop(
f"output_blocks.{i}.2.weight"
)
new_checkpoint[f"up_blocks.{block_id}.upsamplers.0.bias"] = unet_state_dict.pop(
f"output_blocks.{i}.2.bias"
)
if len(attentions):
paths = renew_attention_paths(attentions)
meta_path = {
"old": f"output_blocks.{i}.1",
"new": f"up_blocks.{block_id}.attentions.{layer_in_block_id}",
}
assign_to_checkpoint(
paths, new_checkpoint, unet_state_dict, additional_replacements=[meta_path], config=config
)
else:
resnet_0_paths = renew_resnet_paths(output_block_layers, n_shave_prefix_segments=1)
for path in resnet_0_paths:
old_path = ".".join(["output_blocks", str(i), path["old"]])
new_path = ".".join(["up_blocks", str(block_id), "resnets", str(layer_in_block_id), path["new"]])
new_checkpoint[new_path] = unet_state_dict[old_path]
return new_checkpoint
def convert_vd_vae_checkpoint(checkpoint, config):
# extract state dict for VAE
vae_state_dict = {}
keys = list(checkpoint.keys())
for key in keys:
vae_state_dict[key] = checkpoint.get(key)
new_checkpoint = {}
new_checkpoint["encoder.conv_in.weight"] = vae_state_dict["encoder.conv_in.weight"]
new_checkpoint["encoder.conv_in.bias"] = vae_state_dict["encoder.conv_in.bias"]
new_checkpoint["encoder.conv_out.weight"] = vae_state_dict["encoder.conv_out.weight"]
new_checkpoint["encoder.conv_out.bias"] = vae_state_dict["encoder.conv_out.bias"]
new_checkpoint["encoder.conv_norm_out.weight"] = vae_state_dict["encoder.norm_out.weight"]
new_checkpoint["encoder.conv_norm_out.bias"] = vae_state_dict["encoder.norm_out.bias"]
new_checkpoint["decoder.conv_in.weight"] = vae_state_dict["decoder.conv_in.weight"]
new_checkpoint["decoder.conv_in.bias"] = vae_state_dict["decoder.conv_in.bias"]
new_checkpoint["decoder.conv_out.weight"] = vae_state_dict["decoder.conv_out.weight"]
new_checkpoint["decoder.conv_out.bias"] = vae_state_dict["decoder.conv_out.bias"]
new_checkpoint["decoder.conv_norm_out.weight"] = vae_state_dict["decoder.norm_out.weight"]
new_checkpoint["decoder.conv_norm_out.bias"] = vae_state_dict["decoder.norm_out.bias"]
new_checkpoint["quant_conv.weight"] = vae_state_dict["quant_conv.weight"]
new_checkpoint["quant_conv.bias"] = vae_state_dict["quant_conv.bias"]
new_checkpoint["post_quant_conv.weight"] = vae_state_dict["post_quant_conv.weight"]
new_checkpoint["post_quant_conv.bias"] = vae_state_dict["post_quant_conv.bias"]
# Retrieves the keys for the encoder down blocks only
num_down_blocks = len({".".join(layer.split(".")[:3]) for layer in vae_state_dict if "encoder.down" in layer})
down_blocks = {
layer_id: [key for key in vae_state_dict if f"down.{layer_id}" in key] for layer_id in range(num_down_blocks)
}
# Retrieves the keys for the decoder up blocks only
num_up_blocks = len({".".join(layer.split(".")[:3]) for layer in vae_state_dict if "decoder.up" in layer})
up_blocks = {
layer_id: [key for key in vae_state_dict if f"up.{layer_id}" in key] for layer_id in range(num_up_blocks)
}
for i in range(num_down_blocks):
resnets = [key for key in down_blocks[i] if f"down.{i}" in key and f"down.{i}.downsample" not in key]
if f"encoder.down.{i}.downsample.conv.weight" in vae_state_dict:
new_checkpoint[f"encoder.down_blocks.{i}.downsamplers.0.conv.weight"] = vae_state_dict.pop(
f"encoder.down.{i}.downsample.conv.weight"
)
new_checkpoint[f"encoder.down_blocks.{i}.downsamplers.0.conv.bias"] = vae_state_dict.pop(
f"encoder.down.{i}.downsample.conv.bias"
)
paths = renew_vae_resnet_paths(resnets)
meta_path = {"old": f"down.{i}.block", "new": f"down_blocks.{i}.resnets"}
assign_to_checkpoint(paths, new_checkpoint, vae_state_dict, additional_replacements=[meta_path], config=config)
mid_resnets = [key for key in vae_state_dict if "encoder.mid.block" in key]
num_mid_res_blocks = 2
for i in range(1, num_mid_res_blocks + 1):
resnets = [key for key in mid_resnets if f"encoder.mid.block_{i}" in key]
paths = renew_vae_resnet_paths(resnets)
meta_path = {"old": f"mid.block_{i}", "new": f"mid_block.resnets.{i - 1}"}
assign_to_checkpoint(paths, new_checkpoint, vae_state_dict, additional_replacements=[meta_path], config=config)
mid_attentions = [key for key in vae_state_dict if "encoder.mid.attn" in key]
paths = renew_vae_attention_paths(mid_attentions)
meta_path = {"old": "mid.attn_1", "new": "mid_block.attentions.0"}
assign_to_checkpoint(paths, new_checkpoint, vae_state_dict, additional_replacements=[meta_path], config=config)
conv_attn_to_linear(new_checkpoint)
for i in range(num_up_blocks):
block_id = num_up_blocks - 1 - i
resnets = [
key for key in up_blocks[block_id] if f"up.{block_id}" in key and f"up.{block_id}.upsample" not in key
]
if f"decoder.up.{block_id}.upsample.conv.weight" in vae_state_dict:
new_checkpoint[f"decoder.up_blocks.{i}.upsamplers.0.conv.weight"] = vae_state_dict[
f"decoder.up.{block_id}.upsample.conv.weight"
]
new_checkpoint[f"decoder.up_blocks.{i}.upsamplers.0.conv.bias"] = vae_state_dict[
f"decoder.up.{block_id}.upsample.conv.bias"
]
paths = renew_vae_resnet_paths(resnets)
meta_path = {"old": f"up.{block_id}.block", "new": f"up_blocks.{i}.resnets"}
assign_to_checkpoint(paths, new_checkpoint, vae_state_dict, additional_replacements=[meta_path], config=config)
mid_resnets = [key for key in vae_state_dict if "decoder.mid.block" in key]
num_mid_res_blocks = 2
for i in range(1, num_mid_res_blocks + 1):
resnets = [key for key in mid_resnets if f"decoder.mid.block_{i}" in key]
paths = renew_vae_resnet_paths(resnets)
meta_path = {"old": f"mid.block_{i}", "new": f"mid_block.resnets.{i - 1}"}
assign_to_checkpoint(paths, new_checkpoint, vae_state_dict, additional_replacements=[meta_path], config=config)
mid_attentions = [key for key in vae_state_dict if "decoder.mid.attn" in key]
paths = renew_vae_attention_paths(mid_attentions)
meta_path = {"old": "mid.attn_1", "new": "mid_block.attentions.0"}
assign_to_checkpoint(paths, new_checkpoint, vae_state_dict, additional_replacements=[meta_path], config=config)
conv_attn_to_linear(new_checkpoint)
return new_checkpoint
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument(
"--unet_checkpoint_path", default=None, type=str, required=False, help="Path to the checkpoint to convert."
)
parser.add_argument(
"--vae_checkpoint_path", default=None, type=str, required=False, help="Path to the checkpoint to convert."
)
parser.add_argument(
"--optimus_checkpoint_path", default=None, type=str, required=False, help="Path to the checkpoint to convert."
)
parser.add_argument(
"--scheduler_type",
default="pndm",
type=str,
help="Type of scheduler to use. Should be one of ['pndm', 'lms', 'ddim', 'euler', 'euler-ancestral', 'dpm']",
)
parser.add_argument(
"--extract_ema",
action="store_true",
help=(
"Only relevant for checkpoints that have both EMA and non-EMA weights. Whether to extract the EMA weights"
" or not. Defaults to `False`. Add `--extract_ema` to extract the EMA weights. EMA weights usually yield"
" higher quality images for inference. Non-EMA weights are usually better to continue fine-tuning."
),
)
parser.add_argument("--dump_path", default=None, type=str, required=True, help="Path to the output model.")
args = parser.parse_args()
scheduler_config = SCHEDULER_CONFIG
num_train_timesteps = scheduler_config.timesteps
beta_start = scheduler_config.beta_linear_start
beta_end = scheduler_config.beta_linear_end
if args.scheduler_type == "pndm":
scheduler = PNDMScheduler(
beta_end=beta_end,
beta_schedule="scaled_linear",
beta_start=beta_start,
num_train_timesteps=num_train_timesteps,
skip_prk_steps=True,
steps_offset=1,
)
elif args.scheduler_type == "lms":
scheduler = LMSDiscreteScheduler(beta_start=beta_start, beta_end=beta_end, beta_schedule="scaled_linear")
elif args.scheduler_type == "euler":
scheduler = EulerDiscreteScheduler(beta_start=beta_start, beta_end=beta_end, beta_schedule="scaled_linear")
elif args.scheduler_type == "euler-ancestral":
scheduler = EulerAncestralDiscreteScheduler(
beta_start=beta_start, beta_end=beta_end, beta_schedule="scaled_linear"
)
elif args.scheduler_type == "dpm":
scheduler = DPMSolverMultistepScheduler(
beta_start=beta_start, beta_end=beta_end, beta_schedule="scaled_linear"
)
elif args.scheduler_type == "ddim":
scheduler = DDIMScheduler(
beta_start=beta_start,
beta_end=beta_end,
beta_schedule="scaled_linear",
clip_sample=False,
set_alpha_to_one=False,
steps_offset=1,
)
else:
raise ValueError(f"Scheduler of type {args.scheduler_type} doesn't exist!")
# Convert the UNet2DConditionModel models.
if args.unet_checkpoint_path is not None:
# image UNet
image_unet_config = create_image_unet_diffusers_config(IMAGE_UNET_CONFIG)
checkpoint = torch.load(args.unet_checkpoint_path)
converted_image_unet_checkpoint = convert_vd_unet_checkpoint(
checkpoint, image_unet_config, unet_key="model.diffusion_model.unet_image.", extract_ema=args.extract_ema
)
image_unet = UNet2DConditionModel(**image_unet_config)
image_unet.load_state_dict(converted_image_unet_checkpoint)
# text UNet
text_unet_config = create_text_unet_diffusers_config(TEXT_UNET_CONFIG)
converted_text_unet_checkpoint = convert_vd_unet_checkpoint(
checkpoint, text_unet_config, unet_key="model.diffusion_model.unet_text.", extract_ema=args.extract_ema
)
text_unet = UNetFlatConditionModel(**text_unet_config)
text_unet.load_state_dict(converted_text_unet_checkpoint)
# Convert the VAE model.
if args.vae_checkpoint_path is not None:
vae_config = create_vae_diffusers_config(AUTOENCODER_CONFIG)
checkpoint = torch.load(args.vae_checkpoint_path)
converted_vae_checkpoint = convert_vd_vae_checkpoint(checkpoint, vae_config)
vae = AutoencoderKL(**vae_config)
vae.load_state_dict(converted_vae_checkpoint)
tokenizer = CLIPTokenizer.from_pretrained("openai/clip-vit-large-patch14")
image_feature_extractor = CLIPImageProcessor.from_pretrained("openai/clip-vit-large-patch14")
text_encoder = CLIPTextModelWithProjection.from_pretrained("openai/clip-vit-large-patch14")
image_encoder = CLIPVisionModelWithProjection.from_pretrained("openai/clip-vit-large-patch14")
pipe = VersatileDiffusionPipeline(
scheduler=scheduler,
tokenizer=tokenizer,
image_feature_extractor=image_feature_extractor,
text_encoder=text_encoder,
image_encoder=image_encoder,
image_unet=image_unet,
text_unet=text_unet,
vae=vae,
)
pipe.save_pretrained(args.dump_path)
| 0 |
hf_public_repos/diffusers | hf_public_repos/diffusers/scripts/convert_asymmetric_vqgan_to_diffusers.py | import argparse
import time
from pathlib import Path
from typing import Any, Dict, Literal
import torch
from diffusers import AsymmetricAutoencoderKL
ASYMMETRIC_AUTOENCODER_KL_x_1_5_CONFIG = {
"in_channels": 3,
"out_channels": 3,
"down_block_types": [
"DownEncoderBlock2D",
"DownEncoderBlock2D",
"DownEncoderBlock2D",
"DownEncoderBlock2D",
],
"down_block_out_channels": [128, 256, 512, 512],
"layers_per_down_block": 2,
"up_block_types": [
"UpDecoderBlock2D",
"UpDecoderBlock2D",
"UpDecoderBlock2D",
"UpDecoderBlock2D",
],
"up_block_out_channels": [192, 384, 768, 768],
"layers_per_up_block": 3,
"act_fn": "silu",
"latent_channels": 4,
"norm_num_groups": 32,
"sample_size": 256,
"scaling_factor": 0.18215,
}
ASYMMETRIC_AUTOENCODER_KL_x_2_CONFIG = {
"in_channels": 3,
"out_channels": 3,
"down_block_types": [
"DownEncoderBlock2D",
"DownEncoderBlock2D",
"DownEncoderBlock2D",
"DownEncoderBlock2D",
],
"down_block_out_channels": [128, 256, 512, 512],
"layers_per_down_block": 2,
"up_block_types": [
"UpDecoderBlock2D",
"UpDecoderBlock2D",
"UpDecoderBlock2D",
"UpDecoderBlock2D",
],
"up_block_out_channels": [256, 512, 1024, 1024],
"layers_per_up_block": 5,
"act_fn": "silu",
"latent_channels": 4,
"norm_num_groups": 32,
"sample_size": 256,
"scaling_factor": 0.18215,
}
def convert_asymmetric_autoencoder_kl_state_dict(original_state_dict: Dict[str, Any]) -> Dict[str, Any]:
converted_state_dict = {}
for k, v in original_state_dict.items():
if k.startswith("encoder."):
converted_state_dict[
k.replace("encoder.down.", "encoder.down_blocks.")
.replace("encoder.mid.", "encoder.mid_block.")
.replace("encoder.norm_out.", "encoder.conv_norm_out.")
.replace(".downsample.", ".downsamplers.0.")
.replace(".nin_shortcut.", ".conv_shortcut.")
.replace(".block.", ".resnets.")
.replace(".block_1.", ".resnets.0.")
.replace(".block_2.", ".resnets.1.")
.replace(".attn_1.k.", ".attentions.0.to_k.")
.replace(".attn_1.q.", ".attentions.0.to_q.")
.replace(".attn_1.v.", ".attentions.0.to_v.")
.replace(".attn_1.proj_out.", ".attentions.0.to_out.0.")
.replace(".attn_1.norm.", ".attentions.0.group_norm.")
] = v
elif k.startswith("decoder.") and "up_layers" not in k:
converted_state_dict[
k.replace("decoder.encoder.", "decoder.condition_encoder.")
.replace(".norm_out.", ".conv_norm_out.")
.replace(".up.0.", ".up_blocks.3.")
.replace(".up.1.", ".up_blocks.2.")
.replace(".up.2.", ".up_blocks.1.")
.replace(".up.3.", ".up_blocks.0.")
.replace(".block.", ".resnets.")
.replace("mid", "mid_block")
.replace(".0.upsample.", ".0.upsamplers.0.")
.replace(".1.upsample.", ".1.upsamplers.0.")
.replace(".2.upsample.", ".2.upsamplers.0.")
.replace(".nin_shortcut.", ".conv_shortcut.")
.replace(".block_1.", ".resnets.0.")
.replace(".block_2.", ".resnets.1.")
.replace(".attn_1.k.", ".attentions.0.to_k.")
.replace(".attn_1.q.", ".attentions.0.to_q.")
.replace(".attn_1.v.", ".attentions.0.to_v.")
.replace(".attn_1.proj_out.", ".attentions.0.to_out.0.")
.replace(".attn_1.norm.", ".attentions.0.group_norm.")
] = v
elif k.startswith("quant_conv."):
converted_state_dict[k] = v
elif k.startswith("post_quant_conv."):
converted_state_dict[k] = v
else:
print(f" skipping key `{k}`")
# fix weights shape
for k, v in converted_state_dict.items():
if (
(k.startswith("encoder.mid_block.attentions.0") or k.startswith("decoder.mid_block.attentions.0"))
and k.endswith("weight")
and ("to_q" in k or "to_k" in k or "to_v" in k or "to_out" in k)
):
converted_state_dict[k] = converted_state_dict[k][:, :, 0, 0]
return converted_state_dict
def get_asymmetric_autoencoder_kl_from_original_checkpoint(
scale: Literal["1.5", "2"], original_checkpoint_path: str, map_location: torch.device
) -> AsymmetricAutoencoderKL:
print("Loading original state_dict")
original_state_dict = torch.load(original_checkpoint_path, map_location=map_location)
original_state_dict = original_state_dict["state_dict"]
print("Converting state_dict")
converted_state_dict = convert_asymmetric_autoencoder_kl_state_dict(original_state_dict)
kwargs = ASYMMETRIC_AUTOENCODER_KL_x_1_5_CONFIG if scale == "1.5" else ASYMMETRIC_AUTOENCODER_KL_x_2_CONFIG
print("Initializing AsymmetricAutoencoderKL model")
asymmetric_autoencoder_kl = AsymmetricAutoencoderKL(**kwargs)
print("Loading weight from converted state_dict")
asymmetric_autoencoder_kl.load_state_dict(converted_state_dict)
asymmetric_autoencoder_kl.eval()
print("AsymmetricAutoencoderKL successfully initialized")
return asymmetric_autoencoder_kl
if __name__ == "__main__":
start = time.time()
parser = argparse.ArgumentParser()
parser.add_argument(
"--scale",
default=None,
type=str,
required=True,
help="Asymmetric VQGAN scale: `1.5` or `2`",
)
parser.add_argument(
"--original_checkpoint_path",
default=None,
type=str,
required=True,
help="Path to the original Asymmetric VQGAN checkpoint",
)
parser.add_argument(
"--output_path",
default=None,
type=str,
required=True,
help="Path to save pretrained AsymmetricAutoencoderKL model",
)
parser.add_argument(
"--map_location",
default="cpu",
type=str,
required=False,
help="The device passed to `map_location` when loading the checkpoint",
)
args = parser.parse_args()
assert args.scale in ["1.5", "2"], f"{args.scale} should be `1.5` of `2`"
assert Path(args.original_checkpoint_path).is_file()
asymmetric_autoencoder_kl = get_asymmetric_autoencoder_kl_from_original_checkpoint(
scale=args.scale,
original_checkpoint_path=args.original_checkpoint_path,
map_location=torch.device(args.map_location),
)
print("Saving pretrained AsymmetricAutoencoderKL")
asymmetric_autoencoder_kl.save_pretrained(args.output_path)
print(f"Done in {time.time() - start:.2f} seconds")
| 0 |
hf_public_repos/diffusers | hf_public_repos/diffusers/scripts/convert_shap_e_to_diffusers.py | import argparse
import tempfile
import torch
from accelerate import load_checkpoint_and_dispatch
from diffusers.models.prior_transformer import PriorTransformer
from diffusers.pipelines.shap_e import ShapERenderer
"""
Example - From the diffusers root directory:
Download weights:
```sh
$ wget "https://openaipublic.azureedge.net/main/shap-e/text_cond.pt"
```
Convert the model:
```sh
$ python scripts/convert_shap_e_to_diffusers.py \
--prior_checkpoint_path /home/yiyi_huggingface_co/shap-e/shap_e_model_cache/text_cond.pt \
--prior_image_checkpoint_path /home/yiyi_huggingface_co/shap-e/shap_e_model_cache/image_cond.pt \
--transmitter_checkpoint_path /home/yiyi_huggingface_co/shap-e/shap_e_model_cache/transmitter.pt\
--dump_path /home/yiyi_huggingface_co/model_repo/shap-e-img2img/shap_e_renderer\
--debug renderer
```
"""
# prior
PRIOR_ORIGINAL_PREFIX = "wrapped"
PRIOR_CONFIG = {
"num_attention_heads": 16,
"attention_head_dim": 1024 // 16,
"num_layers": 24,
"embedding_dim": 1024,
"num_embeddings": 1024,
"additional_embeddings": 0,
"time_embed_act_fn": "gelu",
"norm_in_type": "layer",
"encoder_hid_proj_type": None,
"added_emb_type": None,
"time_embed_dim": 1024 * 4,
"embedding_proj_dim": 768,
"clip_embed_dim": 1024 * 2,
}
def prior_model_from_original_config():
model = PriorTransformer(**PRIOR_CONFIG)
return model
def prior_original_checkpoint_to_diffusers_checkpoint(model, checkpoint):
diffusers_checkpoint = {}
# <original>.time_embed.c_fc -> <diffusers>.time_embedding.linear_1
diffusers_checkpoint.update(
{
"time_embedding.linear_1.weight": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.time_embed.c_fc.weight"],
"time_embedding.linear_1.bias": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.time_embed.c_fc.bias"],
}
)
# <original>.time_embed.c_proj -> <diffusers>.time_embedding.linear_2
diffusers_checkpoint.update(
{
"time_embedding.linear_2.weight": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.time_embed.c_proj.weight"],
"time_embedding.linear_2.bias": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.time_embed.c_proj.bias"],
}
)
# <original>.input_proj -> <diffusers>.proj_in
diffusers_checkpoint.update(
{
"proj_in.weight": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.input_proj.weight"],
"proj_in.bias": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.input_proj.bias"],
}
)
# <original>.clip_emb -> <diffusers>.embedding_proj
diffusers_checkpoint.update(
{
"embedding_proj.weight": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.clip_embed.weight"],
"embedding_proj.bias": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.clip_embed.bias"],
}
)
# <original>.pos_emb -> <diffusers>.positional_embedding
diffusers_checkpoint.update({"positional_embedding": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.pos_emb"][None, :]})
# <original>.ln_pre -> <diffusers>.norm_in
diffusers_checkpoint.update(
{
"norm_in.weight": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.ln_pre.weight"],
"norm_in.bias": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.ln_pre.bias"],
}
)
# <original>.backbone.resblocks.<x> -> <diffusers>.transformer_blocks.<x>
for idx in range(len(model.transformer_blocks)):
diffusers_transformer_prefix = f"transformer_blocks.{idx}"
original_transformer_prefix = f"{PRIOR_ORIGINAL_PREFIX}.backbone.resblocks.{idx}"
# <original>.attn -> <diffusers>.attn1
diffusers_attention_prefix = f"{diffusers_transformer_prefix}.attn1"
original_attention_prefix = f"{original_transformer_prefix}.attn"
diffusers_checkpoint.update(
prior_attention_to_diffusers(
checkpoint,
diffusers_attention_prefix=diffusers_attention_prefix,
original_attention_prefix=original_attention_prefix,
attention_head_dim=model.attention_head_dim,
)
)
# <original>.mlp -> <diffusers>.ff
diffusers_ff_prefix = f"{diffusers_transformer_prefix}.ff"
original_ff_prefix = f"{original_transformer_prefix}.mlp"
diffusers_checkpoint.update(
prior_ff_to_diffusers(
checkpoint, diffusers_ff_prefix=diffusers_ff_prefix, original_ff_prefix=original_ff_prefix
)
)
# <original>.ln_1 -> <diffusers>.norm1
diffusers_checkpoint.update(
{
f"{diffusers_transformer_prefix}.norm1.weight": checkpoint[
f"{original_transformer_prefix}.ln_1.weight"
],
f"{diffusers_transformer_prefix}.norm1.bias": checkpoint[f"{original_transformer_prefix}.ln_1.bias"],
}
)
# <original>.ln_2 -> <diffusers>.norm3
diffusers_checkpoint.update(
{
f"{diffusers_transformer_prefix}.norm3.weight": checkpoint[
f"{original_transformer_prefix}.ln_2.weight"
],
f"{diffusers_transformer_prefix}.norm3.bias": checkpoint[f"{original_transformer_prefix}.ln_2.bias"],
}
)
# <original>.ln_post -> <diffusers>.norm_out
diffusers_checkpoint.update(
{
"norm_out.weight": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.ln_post.weight"],
"norm_out.bias": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.ln_post.bias"],
}
)
# <original>.output_proj -> <diffusers>.proj_to_clip_embeddings
diffusers_checkpoint.update(
{
"proj_to_clip_embeddings.weight": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.output_proj.weight"],
"proj_to_clip_embeddings.bias": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.output_proj.bias"],
}
)
return diffusers_checkpoint
def prior_attention_to_diffusers(
checkpoint, *, diffusers_attention_prefix, original_attention_prefix, attention_head_dim
):
diffusers_checkpoint = {}
# <original>.c_qkv -> <diffusers>.{to_q, to_k, to_v}
[q_weight, k_weight, v_weight], [q_bias, k_bias, v_bias] = split_attentions(
weight=checkpoint[f"{original_attention_prefix}.c_qkv.weight"],
bias=checkpoint[f"{original_attention_prefix}.c_qkv.bias"],
split=3,
chunk_size=attention_head_dim,
)
diffusers_checkpoint.update(
{
f"{diffusers_attention_prefix}.to_q.weight": q_weight,
f"{diffusers_attention_prefix}.to_q.bias": q_bias,
f"{diffusers_attention_prefix}.to_k.weight": k_weight,
f"{diffusers_attention_prefix}.to_k.bias": k_bias,
f"{diffusers_attention_prefix}.to_v.weight": v_weight,
f"{diffusers_attention_prefix}.to_v.bias": v_bias,
}
)
# <original>.c_proj -> <diffusers>.to_out.0
diffusers_checkpoint.update(
{
f"{diffusers_attention_prefix}.to_out.0.weight": checkpoint[f"{original_attention_prefix}.c_proj.weight"],
f"{diffusers_attention_prefix}.to_out.0.bias": checkpoint[f"{original_attention_prefix}.c_proj.bias"],
}
)
return diffusers_checkpoint
def prior_ff_to_diffusers(checkpoint, *, diffusers_ff_prefix, original_ff_prefix):
diffusers_checkpoint = {
# <original>.c_fc -> <diffusers>.net.0.proj
f"{diffusers_ff_prefix}.net.{0}.proj.weight": checkpoint[f"{original_ff_prefix}.c_fc.weight"],
f"{diffusers_ff_prefix}.net.{0}.proj.bias": checkpoint[f"{original_ff_prefix}.c_fc.bias"],
# <original>.c_proj -> <diffusers>.net.2
f"{diffusers_ff_prefix}.net.{2}.weight": checkpoint[f"{original_ff_prefix}.c_proj.weight"],
f"{diffusers_ff_prefix}.net.{2}.bias": checkpoint[f"{original_ff_prefix}.c_proj.bias"],
}
return diffusers_checkpoint
# done prior
# prior_image (only slightly different from prior)
PRIOR_IMAGE_ORIGINAL_PREFIX = "wrapped"
# Uses default arguments
PRIOR_IMAGE_CONFIG = {
"num_attention_heads": 8,
"attention_head_dim": 1024 // 8,
"num_layers": 24,
"embedding_dim": 1024,
"num_embeddings": 1024,
"additional_embeddings": 0,
"time_embed_act_fn": "gelu",
"norm_in_type": "layer",
"embedding_proj_norm_type": "layer",
"encoder_hid_proj_type": None,
"added_emb_type": None,
"time_embed_dim": 1024 * 4,
"embedding_proj_dim": 1024,
"clip_embed_dim": 1024 * 2,
}
def prior_image_model_from_original_config():
model = PriorTransformer(**PRIOR_IMAGE_CONFIG)
return model
def prior_image_original_checkpoint_to_diffusers_checkpoint(model, checkpoint):
diffusers_checkpoint = {}
# <original>.time_embed.c_fc -> <diffusers>.time_embedding.linear_1
diffusers_checkpoint.update(
{
"time_embedding.linear_1.weight": checkpoint[f"{PRIOR_IMAGE_ORIGINAL_PREFIX}.time_embed.c_fc.weight"],
"time_embedding.linear_1.bias": checkpoint[f"{PRIOR_IMAGE_ORIGINAL_PREFIX}.time_embed.c_fc.bias"],
}
)
# <original>.time_embed.c_proj -> <diffusers>.time_embedding.linear_2
diffusers_checkpoint.update(
{
"time_embedding.linear_2.weight": checkpoint[f"{PRIOR_IMAGE_ORIGINAL_PREFIX}.time_embed.c_proj.weight"],
"time_embedding.linear_2.bias": checkpoint[f"{PRIOR_IMAGE_ORIGINAL_PREFIX}.time_embed.c_proj.bias"],
}
)
# <original>.input_proj -> <diffusers>.proj_in
diffusers_checkpoint.update(
{
"proj_in.weight": checkpoint[f"{PRIOR_IMAGE_ORIGINAL_PREFIX}.input_proj.weight"],
"proj_in.bias": checkpoint[f"{PRIOR_IMAGE_ORIGINAL_PREFIX}.input_proj.bias"],
}
)
# <original>.clip_embed.0 -> <diffusers>.embedding_proj_norm
diffusers_checkpoint.update(
{
"embedding_proj_norm.weight": checkpoint[f"{PRIOR_IMAGE_ORIGINAL_PREFIX}.clip_embed.0.weight"],
"embedding_proj_norm.bias": checkpoint[f"{PRIOR_IMAGE_ORIGINAL_PREFIX}.clip_embed.0.bias"],
}
)
# <original>..clip_embed.1 -> <diffusers>.embedding_proj
diffusers_checkpoint.update(
{
"embedding_proj.weight": checkpoint[f"{PRIOR_IMAGE_ORIGINAL_PREFIX}.clip_embed.1.weight"],
"embedding_proj.bias": checkpoint[f"{PRIOR_IMAGE_ORIGINAL_PREFIX}.clip_embed.1.bias"],
}
)
# <original>.pos_emb -> <diffusers>.positional_embedding
diffusers_checkpoint.update(
{"positional_embedding": checkpoint[f"{PRIOR_IMAGE_ORIGINAL_PREFIX}.pos_emb"][None, :]}
)
# <original>.ln_pre -> <diffusers>.norm_in
diffusers_checkpoint.update(
{
"norm_in.weight": checkpoint[f"{PRIOR_IMAGE_ORIGINAL_PREFIX}.ln_pre.weight"],
"norm_in.bias": checkpoint[f"{PRIOR_IMAGE_ORIGINAL_PREFIX}.ln_pre.bias"],
}
)
# <original>.backbone.resblocks.<x> -> <diffusers>.transformer_blocks.<x>
for idx in range(len(model.transformer_blocks)):
diffusers_transformer_prefix = f"transformer_blocks.{idx}"
original_transformer_prefix = f"{PRIOR_IMAGE_ORIGINAL_PREFIX}.backbone.resblocks.{idx}"
# <original>.attn -> <diffusers>.attn1
diffusers_attention_prefix = f"{diffusers_transformer_prefix}.attn1"
original_attention_prefix = f"{original_transformer_prefix}.attn"
diffusers_checkpoint.update(
prior_attention_to_diffusers(
checkpoint,
diffusers_attention_prefix=diffusers_attention_prefix,
original_attention_prefix=original_attention_prefix,
attention_head_dim=model.attention_head_dim,
)
)
# <original>.mlp -> <diffusers>.ff
diffusers_ff_prefix = f"{diffusers_transformer_prefix}.ff"
original_ff_prefix = f"{original_transformer_prefix}.mlp"
diffusers_checkpoint.update(
prior_ff_to_diffusers(
checkpoint, diffusers_ff_prefix=diffusers_ff_prefix, original_ff_prefix=original_ff_prefix
)
)
# <original>.ln_1 -> <diffusers>.norm1
diffusers_checkpoint.update(
{
f"{diffusers_transformer_prefix}.norm1.weight": checkpoint[
f"{original_transformer_prefix}.ln_1.weight"
],
f"{diffusers_transformer_prefix}.norm1.bias": checkpoint[f"{original_transformer_prefix}.ln_1.bias"],
}
)
# <original>.ln_2 -> <diffusers>.norm3
diffusers_checkpoint.update(
{
f"{diffusers_transformer_prefix}.norm3.weight": checkpoint[
f"{original_transformer_prefix}.ln_2.weight"
],
f"{diffusers_transformer_prefix}.norm3.bias": checkpoint[f"{original_transformer_prefix}.ln_2.bias"],
}
)
# <original>.ln_post -> <diffusers>.norm_out
diffusers_checkpoint.update(
{
"norm_out.weight": checkpoint[f"{PRIOR_IMAGE_ORIGINAL_PREFIX}.ln_post.weight"],
"norm_out.bias": checkpoint[f"{PRIOR_IMAGE_ORIGINAL_PREFIX}.ln_post.bias"],
}
)
# <original>.output_proj -> <diffusers>.proj_to_clip_embeddings
diffusers_checkpoint.update(
{
"proj_to_clip_embeddings.weight": checkpoint[f"{PRIOR_IMAGE_ORIGINAL_PREFIX}.output_proj.weight"],
"proj_to_clip_embeddings.bias": checkpoint[f"{PRIOR_IMAGE_ORIGINAL_PREFIX}.output_proj.bias"],
}
)
return diffusers_checkpoint
# done prior_image
# renderer
## create the lookup table for marching cubes method used in MeshDecoder
MC_TABLE = [
[],
[[0, 1, 0, 2, 0, 4]],
[[1, 0, 1, 5, 1, 3]],
[[0, 4, 1, 5, 0, 2], [1, 5, 1, 3, 0, 2]],
[[2, 0, 2, 3, 2, 6]],
[[0, 1, 2, 3, 0, 4], [2, 3, 2, 6, 0, 4]],
[[1, 0, 1, 5, 1, 3], [2, 6, 0, 2, 3, 2]],
[[3, 2, 2, 6, 3, 1], [3, 1, 2, 6, 1, 5], [1, 5, 2, 6, 0, 4]],
[[3, 1, 3, 7, 3, 2]],
[[0, 2, 0, 4, 0, 1], [3, 7, 2, 3, 1, 3]],
[[1, 5, 3, 7, 1, 0], [3, 7, 3, 2, 1, 0]],
[[2, 0, 0, 4, 2, 3], [2, 3, 0, 4, 3, 7], [3, 7, 0, 4, 1, 5]],
[[2, 0, 3, 1, 2, 6], [3, 1, 3, 7, 2, 6]],
[[1, 3, 3, 7, 1, 0], [1, 0, 3, 7, 0, 4], [0, 4, 3, 7, 2, 6]],
[[0, 1, 1, 5, 0, 2], [0, 2, 1, 5, 2, 6], [2, 6, 1, 5, 3, 7]],
[[0, 4, 1, 5, 3, 7], [0, 4, 3, 7, 2, 6]],
[[4, 0, 4, 6, 4, 5]],
[[0, 2, 4, 6, 0, 1], [4, 6, 4, 5, 0, 1]],
[[1, 5, 1, 3, 1, 0], [4, 6, 5, 4, 0, 4]],
[[5, 1, 1, 3, 5, 4], [5, 4, 1, 3, 4, 6], [4, 6, 1, 3, 0, 2]],
[[2, 0, 2, 3, 2, 6], [4, 5, 0, 4, 6, 4]],
[[6, 4, 4, 5, 6, 2], [6, 2, 4, 5, 2, 3], [2, 3, 4, 5, 0, 1]],
[[2, 6, 2, 0, 3, 2], [1, 0, 1, 5, 3, 1], [6, 4, 5, 4, 0, 4]],
[[1, 3, 5, 4, 1, 5], [1, 3, 4, 6, 5, 4], [1, 3, 3, 2, 4, 6], [3, 2, 2, 6, 4, 6]],
[[3, 1, 3, 7, 3, 2], [6, 4, 5, 4, 0, 4]],
[[4, 5, 0, 1, 4, 6], [0, 1, 0, 2, 4, 6], [7, 3, 2, 3, 1, 3]],
[[3, 2, 1, 0, 3, 7], [1, 0, 1, 5, 3, 7], [6, 4, 5, 4, 0, 4]],
[[3, 7, 3, 2, 1, 5], [3, 2, 6, 4, 1, 5], [1, 5, 6, 4, 5, 4], [3, 2, 2, 0, 6, 4]],
[[3, 7, 2, 6, 3, 1], [2, 6, 2, 0, 3, 1], [5, 4, 0, 4, 6, 4]],
[[1, 0, 1, 3, 5, 4], [1, 3, 2, 6, 5, 4], [1, 3, 3, 7, 2, 6], [5, 4, 2, 6, 4, 6]],
[[0, 1, 1, 5, 0, 2], [0, 2, 1, 5, 2, 6], [2, 6, 1, 5, 3, 7], [4, 5, 0, 4, 4, 6]],
[[6, 2, 4, 6, 4, 5], [4, 5, 5, 1, 6, 2], [6, 2, 5, 1, 7, 3]],
[[5, 1, 5, 4, 5, 7]],
[[0, 1, 0, 2, 0, 4], [5, 7, 1, 5, 4, 5]],
[[1, 0, 5, 4, 1, 3], [5, 4, 5, 7, 1, 3]],
[[4, 5, 5, 7, 4, 0], [4, 0, 5, 7, 0, 2], [0, 2, 5, 7, 1, 3]],
[[2, 0, 2, 3, 2, 6], [7, 5, 1, 5, 4, 5]],
[[2, 6, 0, 4, 2, 3], [0, 4, 0, 1, 2, 3], [7, 5, 1, 5, 4, 5]],
[[5, 7, 1, 3, 5, 4], [1, 3, 1, 0, 5, 4], [6, 2, 0, 2, 3, 2]],
[[3, 1, 3, 2, 7, 5], [3, 2, 0, 4, 7, 5], [3, 2, 2, 6, 0, 4], [7, 5, 0, 4, 5, 4]],
[[3, 7, 3, 2, 3, 1], [5, 4, 7, 5, 1, 5]],
[[0, 4, 0, 1, 2, 0], [3, 1, 3, 7, 2, 3], [4, 5, 7, 5, 1, 5]],
[[7, 3, 3, 2, 7, 5], [7, 5, 3, 2, 5, 4], [5, 4, 3, 2, 1, 0]],
[[0, 4, 2, 3, 0, 2], [0, 4, 3, 7, 2, 3], [0, 4, 4, 5, 3, 7], [4, 5, 5, 7, 3, 7]],
[[2, 0, 3, 1, 2, 6], [3, 1, 3, 7, 2, 6], [4, 5, 7, 5, 1, 5]],
[[1, 3, 3, 7, 1, 0], [1, 0, 3, 7, 0, 4], [0, 4, 3, 7, 2, 6], [5, 7, 1, 5, 5, 4]],
[[2, 6, 2, 0, 3, 7], [2, 0, 4, 5, 3, 7], [3, 7, 4, 5, 7, 5], [2, 0, 0, 1, 4, 5]],
[[4, 0, 5, 4, 5, 7], [5, 7, 7, 3, 4, 0], [4, 0, 7, 3, 6, 2]],
[[4, 6, 5, 7, 4, 0], [5, 7, 5, 1, 4, 0]],
[[1, 0, 0, 2, 1, 5], [1, 5, 0, 2, 5, 7], [5, 7, 0, 2, 4, 6]],
[[0, 4, 4, 6, 0, 1], [0, 1, 4, 6, 1, 3], [1, 3, 4, 6, 5, 7]],
[[0, 2, 4, 6, 5, 7], [0, 2, 5, 7, 1, 3]],
[[5, 1, 4, 0, 5, 7], [4, 0, 4, 6, 5, 7], [3, 2, 6, 2, 0, 2]],
[[2, 3, 2, 6, 0, 1], [2, 6, 7, 5, 0, 1], [0, 1, 7, 5, 1, 5], [2, 6, 6, 4, 7, 5]],
[[0, 4, 4, 6, 0, 1], [0, 1, 4, 6, 1, 3], [1, 3, 4, 6, 5, 7], [2, 6, 0, 2, 2, 3]],
[[3, 1, 2, 3, 2, 6], [2, 6, 6, 4, 3, 1], [3, 1, 6, 4, 7, 5]],
[[4, 6, 5, 7, 4, 0], [5, 7, 5, 1, 4, 0], [2, 3, 1, 3, 7, 3]],
[[1, 0, 0, 2, 1, 5], [1, 5, 0, 2, 5, 7], [5, 7, 0, 2, 4, 6], [3, 2, 1, 3, 3, 7]],
[[0, 1, 0, 4, 2, 3], [0, 4, 5, 7, 2, 3], [0, 4, 4, 6, 5, 7], [2, 3, 5, 7, 3, 7]],
[[7, 5, 3, 7, 3, 2], [3, 2, 2, 0, 7, 5], [7, 5, 2, 0, 6, 4]],
[[0, 4, 4, 6, 5, 7], [0, 4, 5, 7, 1, 5], [0, 2, 1, 3, 3, 7], [3, 7, 2, 6, 0, 2]],
[
[3, 1, 7, 3, 6, 2],
[6, 2, 0, 1, 3, 1],
[6, 4, 0, 1, 6, 2],
[6, 4, 5, 1, 0, 1],
[6, 4, 7, 5, 5, 1],
],
[
[4, 0, 6, 4, 7, 5],
[7, 5, 1, 0, 4, 0],
[7, 3, 1, 0, 7, 5],
[7, 3, 2, 0, 1, 0],
[7, 3, 6, 2, 2, 0],
],
[[7, 3, 6, 2, 6, 4], [7, 5, 7, 3, 6, 4]],
[[6, 2, 6, 7, 6, 4]],
[[0, 4, 0, 1, 0, 2], [6, 7, 4, 6, 2, 6]],
[[1, 0, 1, 5, 1, 3], [7, 6, 4, 6, 2, 6]],
[[1, 3, 0, 2, 1, 5], [0, 2, 0, 4, 1, 5], [7, 6, 4, 6, 2, 6]],
[[2, 3, 6, 7, 2, 0], [6, 7, 6, 4, 2, 0]],
[[4, 0, 0, 1, 4, 6], [4, 6, 0, 1, 6, 7], [6, 7, 0, 1, 2, 3]],
[[6, 4, 2, 0, 6, 7], [2, 0, 2, 3, 6, 7], [5, 1, 3, 1, 0, 1]],
[[1, 5, 1, 3, 0, 4], [1, 3, 7, 6, 0, 4], [0, 4, 7, 6, 4, 6], [1, 3, 3, 2, 7, 6]],
[[3, 2, 3, 1, 3, 7], [6, 4, 2, 6, 7, 6]],
[[3, 7, 3, 2, 1, 3], [0, 2, 0, 4, 1, 0], [7, 6, 4, 6, 2, 6]],
[[1, 5, 3, 7, 1, 0], [3, 7, 3, 2, 1, 0], [4, 6, 2, 6, 7, 6]],
[[2, 0, 0, 4, 2, 3], [2, 3, 0, 4, 3, 7], [3, 7, 0, 4, 1, 5], [6, 4, 2, 6, 6, 7]],
[[7, 6, 6, 4, 7, 3], [7, 3, 6, 4, 3, 1], [3, 1, 6, 4, 2, 0]],
[[0, 1, 4, 6, 0, 4], [0, 1, 6, 7, 4, 6], [0, 1, 1, 3, 6, 7], [1, 3, 3, 7, 6, 7]],
[[0, 2, 0, 1, 4, 6], [0, 1, 3, 7, 4, 6], [0, 1, 1, 5, 3, 7], [4, 6, 3, 7, 6, 7]],
[[7, 3, 6, 7, 6, 4], [6, 4, 4, 0, 7, 3], [7, 3, 4, 0, 5, 1]],
[[4, 0, 6, 2, 4, 5], [6, 2, 6, 7, 4, 5]],
[[2, 6, 6, 7, 2, 0], [2, 0, 6, 7, 0, 1], [0, 1, 6, 7, 4, 5]],
[[6, 7, 4, 5, 6, 2], [4, 5, 4, 0, 6, 2], [3, 1, 0, 1, 5, 1]],
[[2, 0, 2, 6, 3, 1], [2, 6, 4, 5, 3, 1], [2, 6, 6, 7, 4, 5], [3, 1, 4, 5, 1, 5]],
[[0, 2, 2, 3, 0, 4], [0, 4, 2, 3, 4, 5], [4, 5, 2, 3, 6, 7]],
[[0, 1, 2, 3, 6, 7], [0, 1, 6, 7, 4, 5]],
[[0, 2, 2, 3, 0, 4], [0, 4, 2, 3, 4, 5], [4, 5, 2, 3, 6, 7], [1, 3, 0, 1, 1, 5]],
[[5, 4, 1, 5, 1, 3], [1, 3, 3, 2, 5, 4], [5, 4, 3, 2, 7, 6]],
[[4, 0, 6, 2, 4, 5], [6, 2, 6, 7, 4, 5], [1, 3, 7, 3, 2, 3]],
[[2, 6, 6, 7, 2, 0], [2, 0, 6, 7, 0, 1], [0, 1, 6, 7, 4, 5], [3, 7, 2, 3, 3, 1]],
[[0, 1, 1, 5, 3, 7], [0, 1, 3, 7, 2, 3], [0, 4, 2, 6, 6, 7], [6, 7, 4, 5, 0, 4]],
[
[6, 2, 7, 6, 5, 4],
[5, 4, 0, 2, 6, 2],
[5, 1, 0, 2, 5, 4],
[5, 1, 3, 2, 0, 2],
[5, 1, 7, 3, 3, 2],
],
[[3, 1, 3, 7, 2, 0], [3, 7, 5, 4, 2, 0], [2, 0, 5, 4, 0, 4], [3, 7, 7, 6, 5, 4]],
[[1, 0, 3, 1, 3, 7], [3, 7, 7, 6, 1, 0], [1, 0, 7, 6, 5, 4]],
[
[1, 0, 5, 1, 7, 3],
[7, 3, 2, 0, 1, 0],
[7, 6, 2, 0, 7, 3],
[7, 6, 4, 0, 2, 0],
[7, 6, 5, 4, 4, 0],
],
[[7, 6, 5, 4, 5, 1], [7, 3, 7, 6, 5, 1]],
[[5, 7, 5, 1, 5, 4], [6, 2, 7, 6, 4, 6]],
[[0, 2, 0, 4, 1, 0], [5, 4, 5, 7, 1, 5], [2, 6, 7, 6, 4, 6]],
[[1, 0, 5, 4, 1, 3], [5, 4, 5, 7, 1, 3], [2, 6, 7, 6, 4, 6]],
[[4, 5, 5, 7, 4, 0], [4, 0, 5, 7, 0, 2], [0, 2, 5, 7, 1, 3], [6, 7, 4, 6, 6, 2]],
[[2, 3, 6, 7, 2, 0], [6, 7, 6, 4, 2, 0], [1, 5, 4, 5, 7, 5]],
[[4, 0, 0, 1, 4, 6], [4, 6, 0, 1, 6, 7], [6, 7, 0, 1, 2, 3], [5, 1, 4, 5, 5, 7]],
[[0, 2, 2, 3, 6, 7], [0, 2, 6, 7, 4, 6], [0, 1, 4, 5, 5, 7], [5, 7, 1, 3, 0, 1]],
[
[5, 4, 7, 5, 3, 1],
[3, 1, 0, 4, 5, 4],
[3, 2, 0, 4, 3, 1],
[3, 2, 6, 4, 0, 4],
[3, 2, 7, 6, 6, 4],
],
[[5, 4, 5, 7, 1, 5], [3, 7, 3, 2, 1, 3], [4, 6, 2, 6, 7, 6]],
[[1, 0, 0, 2, 0, 4], [1, 5, 5, 4, 5, 7], [3, 2, 1, 3, 3, 7], [2, 6, 7, 6, 4, 6]],
[[7, 3, 3, 2, 7, 5], [7, 5, 3, 2, 5, 4], [5, 4, 3, 2, 1, 0], [6, 2, 7, 6, 6, 4]],
[
[0, 4, 2, 3, 0, 2],
[0, 4, 3, 7, 2, 3],
[0, 4, 4, 5, 3, 7],
[4, 5, 5, 7, 3, 7],
[6, 7, 4, 6, 2, 6],
],
[[7, 6, 6, 4, 7, 3], [7, 3, 6, 4, 3, 1], [3, 1, 6, 4, 2, 0], [5, 4, 7, 5, 5, 1]],
[
[0, 1, 4, 6, 0, 4],
[0, 1, 6, 7, 4, 6],
[0, 1, 1, 3, 6, 7],
[1, 3, 3, 7, 6, 7],
[5, 7, 1, 5, 4, 5],
],
[
[6, 7, 4, 6, 0, 2],
[0, 2, 3, 7, 6, 7],
[0, 1, 3, 7, 0, 2],
[0, 1, 5, 7, 3, 7],
[0, 1, 4, 5, 5, 7],
],
[[4, 0, 6, 7, 4, 6], [4, 0, 7, 3, 6, 7], [4, 0, 5, 7, 7, 3], [4, 5, 5, 7, 4, 0]],
[[7, 5, 5, 1, 7, 6], [7, 6, 5, 1, 6, 2], [6, 2, 5, 1, 4, 0]],
[[0, 2, 1, 5, 0, 1], [0, 2, 5, 7, 1, 5], [0, 2, 2, 6, 5, 7], [2, 6, 6, 7, 5, 7]],
[[1, 3, 1, 0, 5, 7], [1, 0, 2, 6, 5, 7], [5, 7, 2, 6, 7, 6], [1, 0, 0, 4, 2, 6]],
[[2, 0, 6, 2, 6, 7], [6, 7, 7, 5, 2, 0], [2, 0, 7, 5, 3, 1]],
[[0, 4, 0, 2, 1, 5], [0, 2, 6, 7, 1, 5], [0, 2, 2, 3, 6, 7], [1, 5, 6, 7, 5, 7]],
[[7, 6, 5, 7, 5, 1], [5, 1, 1, 0, 7, 6], [7, 6, 1, 0, 3, 2]],
[
[2, 0, 3, 2, 7, 6],
[7, 6, 4, 0, 2, 0],
[7, 5, 4, 0, 7, 6],
[7, 5, 1, 0, 4, 0],
[7, 5, 3, 1, 1, 0],
],
[[7, 5, 3, 1, 3, 2], [7, 6, 7, 5, 3, 2]],
[[7, 5, 5, 1, 7, 6], [7, 6, 5, 1, 6, 2], [6, 2, 5, 1, 4, 0], [3, 1, 7, 3, 3, 2]],
[
[0, 2, 1, 5, 0, 1],
[0, 2, 5, 7, 1, 5],
[0, 2, 2, 6, 5, 7],
[2, 6, 6, 7, 5, 7],
[3, 7, 2, 3, 1, 3],
],
[
[3, 7, 2, 3, 0, 1],
[0, 1, 5, 7, 3, 7],
[0, 4, 5, 7, 0, 1],
[0, 4, 6, 7, 5, 7],
[0, 4, 2, 6, 6, 7],
],
[[2, 0, 3, 7, 2, 3], [2, 0, 7, 5, 3, 7], [2, 0, 6, 7, 7, 5], [2, 6, 6, 7, 2, 0]],
[
[5, 7, 1, 5, 0, 4],
[0, 4, 6, 7, 5, 7],
[0, 2, 6, 7, 0, 4],
[0, 2, 3, 7, 6, 7],
[0, 2, 1, 3, 3, 7],
],
[[1, 0, 5, 7, 1, 5], [1, 0, 7, 6, 5, 7], [1, 0, 3, 7, 7, 6], [1, 3, 3, 7, 1, 0]],
[[0, 2, 0, 1, 0, 4], [3, 7, 6, 7, 5, 7]],
[[7, 5, 7, 3, 7, 6]],
[[7, 3, 7, 5, 7, 6]],
[[0, 1, 0, 2, 0, 4], [6, 7, 3, 7, 5, 7]],
[[1, 3, 1, 0, 1, 5], [7, 6, 3, 7, 5, 7]],
[[0, 4, 1, 5, 0, 2], [1, 5, 1, 3, 0, 2], [6, 7, 3, 7, 5, 7]],
[[2, 6, 2, 0, 2, 3], [7, 5, 6, 7, 3, 7]],
[[0, 1, 2, 3, 0, 4], [2, 3, 2, 6, 0, 4], [5, 7, 6, 7, 3, 7]],
[[1, 5, 1, 3, 0, 1], [2, 3, 2, 6, 0, 2], [5, 7, 6, 7, 3, 7]],
[[3, 2, 2, 6, 3, 1], [3, 1, 2, 6, 1, 5], [1, 5, 2, 6, 0, 4], [7, 6, 3, 7, 7, 5]],
[[3, 1, 7, 5, 3, 2], [7, 5, 7, 6, 3, 2]],
[[7, 6, 3, 2, 7, 5], [3, 2, 3, 1, 7, 5], [4, 0, 1, 0, 2, 0]],
[[5, 7, 7, 6, 5, 1], [5, 1, 7, 6, 1, 0], [1, 0, 7, 6, 3, 2]],
[[2, 3, 2, 0, 6, 7], [2, 0, 1, 5, 6, 7], [2, 0, 0, 4, 1, 5], [6, 7, 1, 5, 7, 5]],
[[6, 2, 2, 0, 6, 7], [6, 7, 2, 0, 7, 5], [7, 5, 2, 0, 3, 1]],
[[0, 4, 0, 1, 2, 6], [0, 1, 5, 7, 2, 6], [2, 6, 5, 7, 6, 7], [0, 1, 1, 3, 5, 7]],
[[1, 5, 0, 2, 1, 0], [1, 5, 2, 6, 0, 2], [1, 5, 5, 7, 2, 6], [5, 7, 7, 6, 2, 6]],
[[5, 1, 7, 5, 7, 6], [7, 6, 6, 2, 5, 1], [5, 1, 6, 2, 4, 0]],
[[4, 5, 4, 0, 4, 6], [7, 3, 5, 7, 6, 7]],
[[0, 2, 4, 6, 0, 1], [4, 6, 4, 5, 0, 1], [3, 7, 5, 7, 6, 7]],
[[4, 6, 4, 5, 0, 4], [1, 5, 1, 3, 0, 1], [6, 7, 3, 7, 5, 7]],
[[5, 1, 1, 3, 5, 4], [5, 4, 1, 3, 4, 6], [4, 6, 1, 3, 0, 2], [7, 3, 5, 7, 7, 6]],
[[2, 3, 2, 6, 0, 2], [4, 6, 4, 5, 0, 4], [3, 7, 5, 7, 6, 7]],
[[6, 4, 4, 5, 6, 2], [6, 2, 4, 5, 2, 3], [2, 3, 4, 5, 0, 1], [7, 5, 6, 7, 7, 3]],
[[0, 1, 1, 5, 1, 3], [0, 2, 2, 3, 2, 6], [4, 5, 0, 4, 4, 6], [5, 7, 6, 7, 3, 7]],
[
[1, 3, 5, 4, 1, 5],
[1, 3, 4, 6, 5, 4],
[1, 3, 3, 2, 4, 6],
[3, 2, 2, 6, 4, 6],
[7, 6, 3, 7, 5, 7],
],
[[3, 1, 7, 5, 3, 2], [7, 5, 7, 6, 3, 2], [0, 4, 6, 4, 5, 4]],
[[1, 0, 0, 2, 4, 6], [1, 0, 4, 6, 5, 4], [1, 3, 5, 7, 7, 6], [7, 6, 3, 2, 1, 3]],
[[5, 7, 7, 6, 5, 1], [5, 1, 7, 6, 1, 0], [1, 0, 7, 6, 3, 2], [4, 6, 5, 4, 4, 0]],
[
[7, 5, 6, 7, 2, 3],
[2, 3, 1, 5, 7, 5],
[2, 0, 1, 5, 2, 3],
[2, 0, 4, 5, 1, 5],
[2, 0, 6, 4, 4, 5],
],
[[6, 2, 2, 0, 6, 7], [6, 7, 2, 0, 7, 5], [7, 5, 2, 0, 3, 1], [4, 0, 6, 4, 4, 5]],
[
[4, 6, 5, 4, 1, 0],
[1, 0, 2, 6, 4, 6],
[1, 3, 2, 6, 1, 0],
[1, 3, 7, 6, 2, 6],
[1, 3, 5, 7, 7, 6],
],
[
[1, 5, 0, 2, 1, 0],
[1, 5, 2, 6, 0, 2],
[1, 5, 5, 7, 2, 6],
[5, 7, 7, 6, 2, 6],
[4, 6, 5, 4, 0, 4],
],
[[5, 1, 4, 6, 5, 4], [5, 1, 6, 2, 4, 6], [5, 1, 7, 6, 6, 2], [5, 7, 7, 6, 5, 1]],
[[5, 4, 7, 6, 5, 1], [7, 6, 7, 3, 5, 1]],
[[7, 3, 5, 1, 7, 6], [5, 1, 5, 4, 7, 6], [2, 0, 4, 0, 1, 0]],
[[3, 1, 1, 0, 3, 7], [3, 7, 1, 0, 7, 6], [7, 6, 1, 0, 5, 4]],
[[0, 2, 0, 4, 1, 3], [0, 4, 6, 7, 1, 3], [1, 3, 6, 7, 3, 7], [0, 4, 4, 5, 6, 7]],
[[5, 4, 7, 6, 5, 1], [7, 6, 7, 3, 5, 1], [0, 2, 3, 2, 6, 2]],
[[1, 5, 5, 4, 7, 6], [1, 5, 7, 6, 3, 7], [1, 0, 3, 2, 2, 6], [2, 6, 0, 4, 1, 0]],
[[3, 1, 1, 0, 3, 7], [3, 7, 1, 0, 7, 6], [7, 6, 1, 0, 5, 4], [2, 0, 3, 2, 2, 6]],
[
[2, 3, 6, 2, 4, 0],
[4, 0, 1, 3, 2, 3],
[4, 5, 1, 3, 4, 0],
[4, 5, 7, 3, 1, 3],
[4, 5, 6, 7, 7, 3],
],
[[1, 5, 5, 4, 1, 3], [1, 3, 5, 4, 3, 2], [3, 2, 5, 4, 7, 6]],
[[1, 5, 5, 4, 1, 3], [1, 3, 5, 4, 3, 2], [3, 2, 5, 4, 7, 6], [0, 4, 1, 0, 0, 2]],
[[1, 0, 5, 4, 7, 6], [1, 0, 7, 6, 3, 2]],
[[2, 3, 0, 2, 0, 4], [0, 4, 4, 5, 2, 3], [2, 3, 4, 5, 6, 7]],
[[1, 3, 1, 5, 0, 2], [1, 5, 7, 6, 0, 2], [1, 5, 5, 4, 7, 6], [0, 2, 7, 6, 2, 6]],
[
[5, 1, 4, 5, 6, 7],
[6, 7, 3, 1, 5, 1],
[6, 2, 3, 1, 6, 7],
[6, 2, 0, 1, 3, 1],
[6, 2, 4, 0, 0, 1],
],
[[6, 7, 2, 6, 2, 0], [2, 0, 0, 1, 6, 7], [6, 7, 0, 1, 4, 5]],
[[6, 2, 4, 0, 4, 5], [6, 7, 6, 2, 4, 5]],
[[6, 7, 7, 3, 6, 4], [6, 4, 7, 3, 4, 0], [4, 0, 7, 3, 5, 1]],
[[1, 5, 1, 0, 3, 7], [1, 0, 4, 6, 3, 7], [1, 0, 0, 2, 4, 6], [3, 7, 4, 6, 7, 6]],
[[1, 0, 3, 7, 1, 3], [1, 0, 7, 6, 3, 7], [1, 0, 0, 4, 7, 6], [0, 4, 4, 6, 7, 6]],
[[6, 4, 7, 6, 7, 3], [7, 3, 3, 1, 6, 4], [6, 4, 3, 1, 2, 0]],
[[6, 7, 7, 3, 6, 4], [6, 4, 7, 3, 4, 0], [4, 0, 7, 3, 5, 1], [2, 3, 6, 2, 2, 0]],
[
[7, 6, 3, 7, 1, 5],
[1, 5, 4, 6, 7, 6],
[1, 0, 4, 6, 1, 5],
[1, 0, 2, 6, 4, 6],
[1, 0, 3, 2, 2, 6],
],
[
[1, 0, 3, 7, 1, 3],
[1, 0, 7, 6, 3, 7],
[1, 0, 0, 4, 7, 6],
[0, 4, 4, 6, 7, 6],
[2, 6, 0, 2, 3, 2],
],
[[3, 1, 7, 6, 3, 7], [3, 1, 6, 4, 7, 6], [3, 1, 2, 6, 6, 4], [3, 2, 2, 6, 3, 1]],
[[3, 2, 3, 1, 7, 6], [3, 1, 0, 4, 7, 6], [7, 6, 0, 4, 6, 4], [3, 1, 1, 5, 0, 4]],
[
[0, 1, 2, 0, 6, 4],
[6, 4, 5, 1, 0, 1],
[6, 7, 5, 1, 6, 4],
[6, 7, 3, 1, 5, 1],
[6, 7, 2, 3, 3, 1],
],
[[0, 1, 4, 0, 4, 6], [4, 6, 6, 7, 0, 1], [0, 1, 6, 7, 2, 3]],
[[6, 7, 2, 3, 2, 0], [6, 4, 6, 7, 2, 0]],
[
[2, 6, 0, 2, 1, 3],
[1, 3, 7, 6, 2, 6],
[1, 5, 7, 6, 1, 3],
[1, 5, 4, 6, 7, 6],
[1, 5, 0, 4, 4, 6],
],
[[1, 5, 1, 0, 1, 3], [4, 6, 7, 6, 2, 6]],
[[0, 1, 2, 6, 0, 2], [0, 1, 6, 7, 2, 6], [0, 1, 4, 6, 6, 7], [0, 4, 4, 6, 0, 1]],
[[6, 7, 6, 2, 6, 4]],
[[6, 2, 7, 3, 6, 4], [7, 3, 7, 5, 6, 4]],
[[7, 5, 6, 4, 7, 3], [6, 4, 6, 2, 7, 3], [1, 0, 2, 0, 4, 0]],
[[6, 2, 7, 3, 6, 4], [7, 3, 7, 5, 6, 4], [0, 1, 5, 1, 3, 1]],
[[2, 0, 0, 4, 1, 5], [2, 0, 1, 5, 3, 1], [2, 6, 3, 7, 7, 5], [7, 5, 6, 4, 2, 6]],
[[3, 7, 7, 5, 3, 2], [3, 2, 7, 5, 2, 0], [2, 0, 7, 5, 6, 4]],
[[3, 2, 3, 7, 1, 0], [3, 7, 6, 4, 1, 0], [3, 7, 7, 5, 6, 4], [1, 0, 6, 4, 0, 4]],
[[3, 7, 7, 5, 3, 2], [3, 2, 7, 5, 2, 0], [2, 0, 7, 5, 6, 4], [1, 5, 3, 1, 1, 0]],
[
[7, 3, 5, 7, 4, 6],
[4, 6, 2, 3, 7, 3],
[4, 0, 2, 3, 4, 6],
[4, 0, 1, 3, 2, 3],
[4, 0, 5, 1, 1, 3],
],
[[2, 3, 3, 1, 2, 6], [2, 6, 3, 1, 6, 4], [6, 4, 3, 1, 7, 5]],
[[2, 3, 3, 1, 2, 6], [2, 6, 3, 1, 6, 4], [6, 4, 3, 1, 7, 5], [0, 1, 2, 0, 0, 4]],
[[1, 0, 1, 5, 3, 2], [1, 5, 4, 6, 3, 2], [3, 2, 4, 6, 2, 6], [1, 5, 5, 7, 4, 6]],
[
[0, 2, 4, 0, 5, 1],
[5, 1, 3, 2, 0, 2],
[5, 7, 3, 2, 5, 1],
[5, 7, 6, 2, 3, 2],
[5, 7, 4, 6, 6, 2],
],
[[2, 0, 3, 1, 7, 5], [2, 0, 7, 5, 6, 4]],
[[4, 6, 0, 4, 0, 1], [0, 1, 1, 3, 4, 6], [4, 6, 1, 3, 5, 7]],
[[0, 2, 1, 0, 1, 5], [1, 5, 5, 7, 0, 2], [0, 2, 5, 7, 4, 6]],
[[5, 7, 4, 6, 4, 0], [5, 1, 5, 7, 4, 0]],
[[5, 4, 4, 0, 5, 7], [5, 7, 4, 0, 7, 3], [7, 3, 4, 0, 6, 2]],
[[0, 1, 0, 2, 4, 5], [0, 2, 3, 7, 4, 5], [4, 5, 3, 7, 5, 7], [0, 2, 2, 6, 3, 7]],
[[5, 4, 4, 0, 5, 7], [5, 7, 4, 0, 7, 3], [7, 3, 4, 0, 6, 2], [1, 0, 5, 1, 1, 3]],
[
[1, 5, 3, 1, 2, 0],
[2, 0, 4, 5, 1, 5],
[2, 6, 4, 5, 2, 0],
[2, 6, 7, 5, 4, 5],
[2, 6, 3, 7, 7, 5],
],
[[2, 3, 0, 4, 2, 0], [2, 3, 4, 5, 0, 4], [2, 3, 3, 7, 4, 5], [3, 7, 7, 5, 4, 5]],
[[3, 2, 7, 3, 7, 5], [7, 5, 5, 4, 3, 2], [3, 2, 5, 4, 1, 0]],
[
[2, 3, 0, 4, 2, 0],
[2, 3, 4, 5, 0, 4],
[2, 3, 3, 7, 4, 5],
[3, 7, 7, 5, 4, 5],
[1, 5, 3, 1, 0, 1],
],
[[3, 2, 1, 5, 3, 1], [3, 2, 5, 4, 1, 5], [3, 2, 7, 5, 5, 4], [3, 7, 7, 5, 3, 2]],
[[2, 6, 2, 3, 0, 4], [2, 3, 7, 5, 0, 4], [2, 3, 3, 1, 7, 5], [0, 4, 7, 5, 4, 5]],
[
[3, 2, 1, 3, 5, 7],
[5, 7, 6, 2, 3, 2],
[5, 4, 6, 2, 5, 7],
[5, 4, 0, 2, 6, 2],
[5, 4, 1, 0, 0, 2],
],
[
[4, 5, 0, 4, 2, 6],
[2, 6, 7, 5, 4, 5],
[2, 3, 7, 5, 2, 6],
[2, 3, 1, 5, 7, 5],
[2, 3, 0, 1, 1, 5],
],
[[2, 3, 2, 0, 2, 6], [1, 5, 7, 5, 4, 5]],
[[5, 7, 4, 5, 4, 0], [4, 0, 0, 2, 5, 7], [5, 7, 0, 2, 1, 3]],
[[5, 4, 1, 0, 1, 3], [5, 7, 5, 4, 1, 3]],
[[0, 2, 4, 5, 0, 4], [0, 2, 5, 7, 4, 5], [0, 2, 1, 5, 5, 7], [0, 1, 1, 5, 0, 2]],
[[5, 4, 5, 1, 5, 7]],
[[4, 6, 6, 2, 4, 5], [4, 5, 6, 2, 5, 1], [5, 1, 6, 2, 7, 3]],
[[4, 6, 6, 2, 4, 5], [4, 5, 6, 2, 5, 1], [5, 1, 6, 2, 7, 3], [0, 2, 4, 0, 0, 1]],
[[3, 7, 3, 1, 2, 6], [3, 1, 5, 4, 2, 6], [3, 1, 1, 0, 5, 4], [2, 6, 5, 4, 6, 4]],
[
[6, 4, 2, 6, 3, 7],
[3, 7, 5, 4, 6, 4],
[3, 1, 5, 4, 3, 7],
[3, 1, 0, 4, 5, 4],
[3, 1, 2, 0, 0, 4],
],
[[2, 0, 2, 3, 6, 4], [2, 3, 1, 5, 6, 4], [6, 4, 1, 5, 4, 5], [2, 3, 3, 7, 1, 5]],
[
[0, 4, 1, 0, 3, 2],
[3, 2, 6, 4, 0, 4],
[3, 7, 6, 4, 3, 2],
[3, 7, 5, 4, 6, 4],
[3, 7, 1, 5, 5, 4],
],
[
[1, 3, 0, 1, 4, 5],
[4, 5, 7, 3, 1, 3],
[4, 6, 7, 3, 4, 5],
[4, 6, 2, 3, 7, 3],
[4, 6, 0, 2, 2, 3],
],
[[3, 7, 3, 1, 3, 2], [5, 4, 6, 4, 0, 4]],
[[3, 1, 2, 6, 3, 2], [3, 1, 6, 4, 2, 6], [3, 1, 1, 5, 6, 4], [1, 5, 5, 4, 6, 4]],
[
[3, 1, 2, 6, 3, 2],
[3, 1, 6, 4, 2, 6],
[3, 1, 1, 5, 6, 4],
[1, 5, 5, 4, 6, 4],
[0, 4, 1, 0, 2, 0],
],
[[4, 5, 6, 4, 6, 2], [6, 2, 2, 3, 4, 5], [4, 5, 2, 3, 0, 1]],
[[2, 3, 6, 4, 2, 6], [2, 3, 4, 5, 6, 4], [2, 3, 0, 4, 4, 5], [2, 0, 0, 4, 2, 3]],
[[1, 3, 5, 1, 5, 4], [5, 4, 4, 6, 1, 3], [1, 3, 4, 6, 0, 2]],
[[1, 3, 0, 4, 1, 0], [1, 3, 4, 6, 0, 4], [1, 3, 5, 4, 4, 6], [1, 5, 5, 4, 1, 3]],
[[4, 6, 0, 2, 0, 1], [4, 5, 4, 6, 0, 1]],
[[4, 6, 4, 0, 4, 5]],
[[4, 0, 6, 2, 7, 3], [4, 0, 7, 3, 5, 1]],
[[1, 5, 0, 1, 0, 2], [0, 2, 2, 6, 1, 5], [1, 5, 2, 6, 3, 7]],
[[3, 7, 1, 3, 1, 0], [1, 0, 0, 4, 3, 7], [3, 7, 0, 4, 2, 6]],
[[3, 1, 2, 0, 2, 6], [3, 7, 3, 1, 2, 6]],
[[0, 4, 2, 0, 2, 3], [2, 3, 3, 7, 0, 4], [0, 4, 3, 7, 1, 5]],
[[3, 7, 1, 5, 1, 0], [3, 2, 3, 7, 1, 0]],
[[0, 4, 1, 3, 0, 1], [0, 4, 3, 7, 1, 3], [0, 4, 2, 3, 3, 7], [0, 2, 2, 3, 0, 4]],
[[3, 7, 3, 1, 3, 2]],
[[2, 6, 3, 2, 3, 1], [3, 1, 1, 5, 2, 6], [2, 6, 1, 5, 0, 4]],
[[1, 5, 3, 2, 1, 3], [1, 5, 2, 6, 3, 2], [1, 5, 0, 2, 2, 6], [1, 0, 0, 2, 1, 5]],
[[2, 3, 0, 1, 0, 4], [2, 6, 2, 3, 0, 4]],
[[2, 3, 2, 0, 2, 6]],
[[1, 5, 0, 4, 0, 2], [1, 3, 1, 5, 0, 2]],
[[1, 5, 1, 0, 1, 3]],
[[0, 2, 0, 1, 0, 4]],
[],
]
def create_mc_lookup_table():
cases = torch.zeros(256, 5, 3, dtype=torch.long)
masks = torch.zeros(256, 5, dtype=torch.bool)
edge_to_index = {
(0, 1): 0,
(2, 3): 1,
(4, 5): 2,
(6, 7): 3,
(0, 2): 4,
(1, 3): 5,
(4, 6): 6,
(5, 7): 7,
(0, 4): 8,
(1, 5): 9,
(2, 6): 10,
(3, 7): 11,
}
for i, case in enumerate(MC_TABLE):
for j, tri in enumerate(case):
for k, (c1, c2) in enumerate(zip(tri[::2], tri[1::2])):
cases[i, j, k] = edge_to_index[(c1, c2) if c1 < c2 else (c2, c1)]
masks[i, j] = True
return cases, masks
RENDERER_CONFIG = {}
def renderer_model_from_original_config():
model = ShapERenderer(**RENDERER_CONFIG)
return model
RENDERER_MLP_ORIGINAL_PREFIX = "renderer.nerstf"
RENDERER_PARAMS_PROJ_ORIGINAL_PREFIX = "encoder.params_proj"
def renderer_model_original_checkpoint_to_diffusers_checkpoint(model, checkpoint):
diffusers_checkpoint = {}
diffusers_checkpoint.update(
{f"mlp.{k}": checkpoint[f"{RENDERER_MLP_ORIGINAL_PREFIX}.{k}"] for k in model.mlp.state_dict().keys()}
)
diffusers_checkpoint.update(
{
f"params_proj.{k}": checkpoint[f"{RENDERER_PARAMS_PROJ_ORIGINAL_PREFIX}.{k}"]
for k in model.params_proj.state_dict().keys()
}
)
diffusers_checkpoint.update({"void.background": model.state_dict()["void.background"]})
cases, masks = create_mc_lookup_table()
diffusers_checkpoint.update({"mesh_decoder.cases": cases})
diffusers_checkpoint.update({"mesh_decoder.masks": masks})
return diffusers_checkpoint
# done renderer
# TODO maybe document and/or can do more efficiently (build indices in for loop and extract once for each split?)
def split_attentions(*, weight, bias, split, chunk_size):
weights = [None] * split
biases = [None] * split
weights_biases_idx = 0
for starting_row_index in range(0, weight.shape[0], chunk_size):
row_indices = torch.arange(starting_row_index, starting_row_index + chunk_size)
weight_rows = weight[row_indices, :]
bias_rows = bias[row_indices]
if weights[weights_biases_idx] is None:
assert weights[weights_biases_idx] is None
weights[weights_biases_idx] = weight_rows
biases[weights_biases_idx] = bias_rows
else:
assert weights[weights_biases_idx] is not None
weights[weights_biases_idx] = torch.concat([weights[weights_biases_idx], weight_rows])
biases[weights_biases_idx] = torch.concat([biases[weights_biases_idx], bias_rows])
weights_biases_idx = (weights_biases_idx + 1) % split
return weights, biases
# done unet utils
# Driver functions
def prior(*, args, checkpoint_map_location):
print("loading prior")
prior_checkpoint = torch.load(args.prior_checkpoint_path, map_location=checkpoint_map_location)
prior_model = prior_model_from_original_config()
prior_diffusers_checkpoint = prior_original_checkpoint_to_diffusers_checkpoint(prior_model, prior_checkpoint)
del prior_checkpoint
load_prior_checkpoint_to_model(prior_diffusers_checkpoint, prior_model)
print("done loading prior")
return prior_model
def prior_image(*, args, checkpoint_map_location):
print("loading prior_image")
print(f"load checkpoint from {args.prior_image_checkpoint_path}")
prior_checkpoint = torch.load(args.prior_image_checkpoint_path, map_location=checkpoint_map_location)
prior_model = prior_image_model_from_original_config()
prior_diffusers_checkpoint = prior_image_original_checkpoint_to_diffusers_checkpoint(prior_model, prior_checkpoint)
del prior_checkpoint
load_prior_checkpoint_to_model(prior_diffusers_checkpoint, prior_model)
print("done loading prior_image")
return prior_model
def renderer(*, args, checkpoint_map_location):
print(" loading renderer")
renderer_checkpoint = torch.load(args.transmitter_checkpoint_path, map_location=checkpoint_map_location)
renderer_model = renderer_model_from_original_config()
renderer_diffusers_checkpoint = renderer_model_original_checkpoint_to_diffusers_checkpoint(
renderer_model, renderer_checkpoint
)
del renderer_checkpoint
load_checkpoint_to_model(renderer_diffusers_checkpoint, renderer_model, strict=True)
print("done loading renderer")
return renderer_model
# prior model will expect clip_mean and clip_std, whic are missing from the state_dict
PRIOR_EXPECTED_MISSING_KEYS = ["clip_mean", "clip_std"]
def load_prior_checkpoint_to_model(checkpoint, model):
with tempfile.NamedTemporaryFile() as file:
torch.save(checkpoint, file.name)
del checkpoint
missing_keys, unexpected_keys = model.load_state_dict(torch.load(file.name), strict=False)
missing_keys = list(set(missing_keys) - set(PRIOR_EXPECTED_MISSING_KEYS))
if len(unexpected_keys) > 0:
raise ValueError(f"Unexpected keys when loading prior model: {unexpected_keys}")
if len(missing_keys) > 0:
raise ValueError(f"Missing keys when loading prior model: {missing_keys}")
def load_checkpoint_to_model(checkpoint, model, strict=False):
with tempfile.NamedTemporaryFile() as file:
torch.save(checkpoint, file.name)
del checkpoint
if strict:
model.load_state_dict(torch.load(file.name), strict=True)
else:
load_checkpoint_and_dispatch(model, file.name, device_map="auto")
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument("--dump_path", default=None, type=str, required=True, help="Path to the output model.")
parser.add_argument(
"--prior_checkpoint_path",
default=None,
type=str,
required=False,
help="Path to the prior checkpoint to convert.",
)
parser.add_argument(
"--prior_image_checkpoint_path",
default=None,
type=str,
required=False,
help="Path to the prior_image checkpoint to convert.",
)
parser.add_argument(
"--transmitter_checkpoint_path",
default=None,
type=str,
required=False,
help="Path to the transmitter checkpoint to convert.",
)
parser.add_argument(
"--checkpoint_load_device",
default="cpu",
type=str,
required=False,
help="The device passed to `map_location` when loading checkpoints.",
)
parser.add_argument(
"--debug",
default=None,
type=str,
required=False,
help="Only run a specific stage of the convert script. Used for debugging",
)
args = parser.parse_args()
print(f"loading checkpoints to {args.checkpoint_load_device}")
checkpoint_map_location = torch.device(args.checkpoint_load_device)
if args.debug is not None:
print(f"debug: only executing {args.debug}")
if args.debug is None:
print("YiYi TO-DO")
elif args.debug == "prior":
prior_model = prior(args=args, checkpoint_map_location=checkpoint_map_location)
prior_model.save_pretrained(args.dump_path)
elif args.debug == "prior_image":
prior_model = prior_image(args=args, checkpoint_map_location=checkpoint_map_location)
prior_model.save_pretrained(args.dump_path)
elif args.debug == "renderer":
renderer_model = renderer(args=args, checkpoint_map_location=checkpoint_map_location)
renderer_model.save_pretrained(args.dump_path)
else:
raise ValueError(f"unknown debug value : {args.debug}")
| 0 |
hf_public_repos/diffusers | hf_public_repos/diffusers/scripts/convert_unidiffuser_to_diffusers.py | # Convert the original UniDiffuser checkpoints into diffusers equivalents.
import argparse
from argparse import Namespace
import torch
from transformers import (
CLIPImageProcessor,
CLIPTextConfig,
CLIPTextModel,
CLIPTokenizer,
CLIPVisionConfig,
CLIPVisionModelWithProjection,
GPT2Tokenizer,
)
from diffusers import (
AutoencoderKL,
DPMSolverMultistepScheduler,
UniDiffuserModel,
UniDiffuserPipeline,
UniDiffuserTextDecoder,
)
SCHEDULER_CONFIG = Namespace(
**{
"beta_start": 0.00085,
"beta_end": 0.012,
"beta_schedule": "scaled_linear",
"solver_order": 3,
}
)
# Copied from diffusers.pipelines.stable_diffusion.convert_from_ckpt.shave_segments
def shave_segments(path, n_shave_prefix_segments=1):
"""
Removes segments. Positive values shave the first segments, negative shave the last segments.
"""
if n_shave_prefix_segments >= 0:
return ".".join(path.split(".")[n_shave_prefix_segments:])
else:
return ".".join(path.split(".")[:n_shave_prefix_segments])
# Copied from diffusers.pipelines.stable_diffusion.convert_from_ckpt.renew_vae_resnet_paths
def renew_vae_resnet_paths(old_list, n_shave_prefix_segments=0):
"""
Updates paths inside resnets to the new naming scheme (local renaming)
"""
mapping = []
for old_item in old_list:
new_item = old_item
new_item = new_item.replace("nin_shortcut", "conv_shortcut")
new_item = shave_segments(new_item, n_shave_prefix_segments=n_shave_prefix_segments)
mapping.append({"old": old_item, "new": new_item})
return mapping
# Copied from diffusers.pipelines.stable_diffusion.convert_from_ckpt.renew_vae_attention_paths
def renew_vae_attention_paths(old_list, n_shave_prefix_segments=0):
"""
Updates paths inside attentions to the new naming scheme (local renaming)
"""
mapping = []
for old_item in old_list:
new_item = old_item
new_item = new_item.replace("norm.weight", "group_norm.weight")
new_item = new_item.replace("norm.bias", "group_norm.bias")
new_item = new_item.replace("q.weight", "query.weight")
new_item = new_item.replace("q.bias", "query.bias")
new_item = new_item.replace("k.weight", "key.weight")
new_item = new_item.replace("k.bias", "key.bias")
new_item = new_item.replace("v.weight", "value.weight")
new_item = new_item.replace("v.bias", "value.bias")
new_item = new_item.replace("proj_out.weight", "proj_attn.weight")
new_item = new_item.replace("proj_out.bias", "proj_attn.bias")
new_item = shave_segments(new_item, n_shave_prefix_segments=n_shave_prefix_segments)
mapping.append({"old": old_item, "new": new_item})
return mapping
# Modified from diffusers.pipelines.stable_diffusion.convert_from_ckpt.assign_to_checkpoint
# config.num_head_channels => num_head_channels
def assign_to_checkpoint(
paths,
checkpoint,
old_checkpoint,
attention_paths_to_split=None,
additional_replacements=None,
num_head_channels=1,
):
"""
This does the final conversion step: take locally converted weights and apply a global renaming to them. It splits
attention layers, and takes into account additional replacements that may arise. Assigns the weights to the new
checkpoint.
"""
assert isinstance(paths, list), "Paths should be a list of dicts containing 'old' and 'new' keys."
# Splits the attention layers into three variables.
if attention_paths_to_split is not None:
for path, path_map in attention_paths_to_split.items():
old_tensor = old_checkpoint[path]
channels = old_tensor.shape[0] // 3
target_shape = (-1, channels) if len(old_tensor.shape) == 3 else (-1)
num_heads = old_tensor.shape[0] // num_head_channels // 3
old_tensor = old_tensor.reshape((num_heads, 3 * channels // num_heads) + old_tensor.shape[1:])
query, key, value = old_tensor.split(channels // num_heads, dim=1)
checkpoint[path_map["query"]] = query.reshape(target_shape)
checkpoint[path_map["key"]] = key.reshape(target_shape)
checkpoint[path_map["value"]] = value.reshape(target_shape)
for path in paths:
new_path = path["new"]
# These have already been assigned
if attention_paths_to_split is not None and new_path in attention_paths_to_split:
continue
# Global renaming happens here
new_path = new_path.replace("middle_block.0", "mid_block.resnets.0")
new_path = new_path.replace("middle_block.1", "mid_block.attentions.0")
new_path = new_path.replace("middle_block.2", "mid_block.resnets.1")
if additional_replacements is not None:
for replacement in additional_replacements:
new_path = new_path.replace(replacement["old"], replacement["new"])
# proj_attn.weight has to be converted from conv 1D to linear
if "proj_attn.weight" in new_path:
checkpoint[new_path] = old_checkpoint[path["old"]][:, :, 0]
else:
checkpoint[new_path] = old_checkpoint[path["old"]]
# Copied from diffusers.pipelines.stable_diffusion.convert_from_ckpt.conv_attn_to_linear
def conv_attn_to_linear(checkpoint):
keys = list(checkpoint.keys())
attn_keys = ["query.weight", "key.weight", "value.weight"]
for key in keys:
if ".".join(key.split(".")[-2:]) in attn_keys:
if checkpoint[key].ndim > 2:
checkpoint[key] = checkpoint[key][:, :, 0, 0]
elif "proj_attn.weight" in key:
if checkpoint[key].ndim > 2:
checkpoint[key] = checkpoint[key][:, :, 0]
def create_vae_diffusers_config(config_type):
# Hardcoded for now
if args.config_type == "test":
vae_config = create_vae_diffusers_config_test()
elif args.config_type == "big":
vae_config = create_vae_diffusers_config_big()
else:
raise NotImplementedError(
f"Config type {config_type} is not implemented, currently only config types"
" 'test' and 'big' are available."
)
return vae_config
def create_unidiffuser_unet_config(config_type, version):
# Hardcoded for now
if args.config_type == "test":
unet_config = create_unidiffuser_unet_config_test()
elif args.config_type == "big":
unet_config = create_unidiffuser_unet_config_big()
else:
raise NotImplementedError(
f"Config type {config_type} is not implemented, currently only config types"
" 'test' and 'big' are available."
)
# Unidiffuser-v1 uses data type embeddings
if version == 1:
unet_config["use_data_type_embedding"] = True
return unet_config
def create_text_decoder_config(config_type):
# Hardcoded for now
if args.config_type == "test":
text_decoder_config = create_text_decoder_config_test()
elif args.config_type == "big":
text_decoder_config = create_text_decoder_config_big()
else:
raise NotImplementedError(
f"Config type {config_type} is not implemented, currently only config types"
" 'test' and 'big' are available."
)
return text_decoder_config
# Hardcoded configs for test versions of the UniDiffuser models, corresponding to those in the fast default tests.
def create_vae_diffusers_config_test():
vae_config = {
"sample_size": 32,
"in_channels": 3,
"out_channels": 3,
"down_block_types": ["DownEncoderBlock2D", "DownEncoderBlock2D"],
"up_block_types": ["UpDecoderBlock2D", "UpDecoderBlock2D"],
"block_out_channels": [32, 64],
"latent_channels": 4,
"layers_per_block": 1,
}
return vae_config
def create_unidiffuser_unet_config_test():
unet_config = {
"text_dim": 32,
"clip_img_dim": 32,
"num_text_tokens": 77,
"num_attention_heads": 2,
"attention_head_dim": 8,
"in_channels": 4,
"out_channels": 4,
"num_layers": 2,
"dropout": 0.0,
"norm_num_groups": 32,
"attention_bias": False,
"sample_size": 16,
"patch_size": 2,
"activation_fn": "gelu",
"num_embeds_ada_norm": 1000,
"norm_type": "layer_norm",
"block_type": "unidiffuser",
"pre_layer_norm": False,
"use_timestep_embedding": False,
"norm_elementwise_affine": True,
"use_patch_pos_embed": False,
"ff_final_dropout": True,
"use_data_type_embedding": False,
}
return unet_config
def create_text_decoder_config_test():
text_decoder_config = {
"prefix_length": 77,
"prefix_inner_dim": 32,
"prefix_hidden_dim": 32,
"vocab_size": 1025, # 1024 + 1 for new EOS token
"n_positions": 1024,
"n_embd": 32,
"n_layer": 5,
"n_head": 4,
"n_inner": 37,
"activation_function": "gelu",
"resid_pdrop": 0.1,
"embd_pdrop": 0.1,
"attn_pdrop": 0.1,
"layer_norm_epsilon": 1e-5,
"initializer_range": 0.02,
}
return text_decoder_config
# Hardcoded configs for the UniDiffuser V1 model at https://huggingface.co/thu-ml/unidiffuser-v1
# See also https://github.com/thu-ml/unidiffuser/blob/main/configs/sample_unidiffuser_v1.py
def create_vae_diffusers_config_big():
vae_config = {
"sample_size": 256,
"in_channels": 3,
"out_channels": 3,
"down_block_types": ["DownEncoderBlock2D", "DownEncoderBlock2D", "DownEncoderBlock2D", "DownEncoderBlock2D"],
"up_block_types": ["UpDecoderBlock2D", "UpDecoderBlock2D", "UpDecoderBlock2D", "UpDecoderBlock2D"],
"block_out_channels": [128, 256, 512, 512],
"latent_channels": 4,
"layers_per_block": 2,
}
return vae_config
def create_unidiffuser_unet_config_big():
unet_config = {
"text_dim": 64,
"clip_img_dim": 512,
"num_text_tokens": 77,
"num_attention_heads": 24,
"attention_head_dim": 64,
"in_channels": 4,
"out_channels": 4,
"num_layers": 30,
"dropout": 0.0,
"norm_num_groups": 32,
"attention_bias": False,
"sample_size": 64,
"patch_size": 2,
"activation_fn": "gelu",
"num_embeds_ada_norm": 1000,
"norm_type": "layer_norm",
"block_type": "unidiffuser",
"pre_layer_norm": False,
"use_timestep_embedding": False,
"norm_elementwise_affine": True,
"use_patch_pos_embed": False,
"ff_final_dropout": True,
"use_data_type_embedding": False,
}
return unet_config
# From https://huggingface.co/gpt2/blob/main/config.json, the GPT2 checkpoint used by UniDiffuser
def create_text_decoder_config_big():
text_decoder_config = {
"prefix_length": 77,
"prefix_inner_dim": 768,
"prefix_hidden_dim": 64,
"vocab_size": 50258, # 50257 + 1 for new EOS token
"n_positions": 1024,
"n_embd": 768,
"n_layer": 12,
"n_head": 12,
"n_inner": 3072,
"activation_function": "gelu",
"resid_pdrop": 0.1,
"embd_pdrop": 0.1,
"attn_pdrop": 0.1,
"layer_norm_epsilon": 1e-5,
"initializer_range": 0.02,
}
return text_decoder_config
# Based on diffusers.pipelines.stable_diffusion.convert_from_ckpt.shave_segments.convert_ldm_vae_checkpoint
def convert_vae_to_diffusers(ckpt, diffusers_model, num_head_channels=1):
"""
Converts a UniDiffuser autoencoder_kl.pth checkpoint to a diffusers AutoencoderKL.
"""
# autoencoder_kl.pth ckpt is a torch state dict
vae_state_dict = torch.load(ckpt, map_location="cpu")
new_checkpoint = {}
new_checkpoint["encoder.conv_in.weight"] = vae_state_dict["encoder.conv_in.weight"]
new_checkpoint["encoder.conv_in.bias"] = vae_state_dict["encoder.conv_in.bias"]
new_checkpoint["encoder.conv_out.weight"] = vae_state_dict["encoder.conv_out.weight"]
new_checkpoint["encoder.conv_out.bias"] = vae_state_dict["encoder.conv_out.bias"]
new_checkpoint["encoder.conv_norm_out.weight"] = vae_state_dict["encoder.norm_out.weight"]
new_checkpoint["encoder.conv_norm_out.bias"] = vae_state_dict["encoder.norm_out.bias"]
new_checkpoint["decoder.conv_in.weight"] = vae_state_dict["decoder.conv_in.weight"]
new_checkpoint["decoder.conv_in.bias"] = vae_state_dict["decoder.conv_in.bias"]
new_checkpoint["decoder.conv_out.weight"] = vae_state_dict["decoder.conv_out.weight"]
new_checkpoint["decoder.conv_out.bias"] = vae_state_dict["decoder.conv_out.bias"]
new_checkpoint["decoder.conv_norm_out.weight"] = vae_state_dict["decoder.norm_out.weight"]
new_checkpoint["decoder.conv_norm_out.bias"] = vae_state_dict["decoder.norm_out.bias"]
new_checkpoint["quant_conv.weight"] = vae_state_dict["quant_conv.weight"]
new_checkpoint["quant_conv.bias"] = vae_state_dict["quant_conv.bias"]
new_checkpoint["post_quant_conv.weight"] = vae_state_dict["post_quant_conv.weight"]
new_checkpoint["post_quant_conv.bias"] = vae_state_dict["post_quant_conv.bias"]
# Retrieves the keys for the encoder down blocks only
num_down_blocks = len({".".join(layer.split(".")[:3]) for layer in vae_state_dict if "encoder.down" in layer})
down_blocks = {
layer_id: [key for key in vae_state_dict if f"down.{layer_id}" in key] for layer_id in range(num_down_blocks)
}
# Retrieves the keys for the decoder up blocks only
num_up_blocks = len({".".join(layer.split(".")[:3]) for layer in vae_state_dict if "decoder.up" in layer})
up_blocks = {
layer_id: [key for key in vae_state_dict if f"up.{layer_id}" in key] for layer_id in range(num_up_blocks)
}
for i in range(num_down_blocks):
resnets = [key for key in down_blocks[i] if f"down.{i}" in key and f"down.{i}.downsample" not in key]
if f"encoder.down.{i}.downsample.conv.weight" in vae_state_dict:
new_checkpoint[f"encoder.down_blocks.{i}.downsamplers.0.conv.weight"] = vae_state_dict.pop(
f"encoder.down.{i}.downsample.conv.weight"
)
new_checkpoint[f"encoder.down_blocks.{i}.downsamplers.0.conv.bias"] = vae_state_dict.pop(
f"encoder.down.{i}.downsample.conv.bias"
)
paths = renew_vae_resnet_paths(resnets)
meta_path = {"old": f"down.{i}.block", "new": f"down_blocks.{i}.resnets"}
assign_to_checkpoint(
paths,
new_checkpoint,
vae_state_dict,
additional_replacements=[meta_path],
num_head_channels=num_head_channels, # not used in vae
)
mid_resnets = [key for key in vae_state_dict if "encoder.mid.block" in key]
num_mid_res_blocks = 2
for i in range(1, num_mid_res_blocks + 1):
resnets = [key for key in mid_resnets if f"encoder.mid.block_{i}" in key]
paths = renew_vae_resnet_paths(resnets)
meta_path = {"old": f"mid.block_{i}", "new": f"mid_block.resnets.{i - 1}"}
assign_to_checkpoint(
paths,
new_checkpoint,
vae_state_dict,
additional_replacements=[meta_path],
num_head_channels=num_head_channels, # not used in vae
)
mid_attentions = [key for key in vae_state_dict if "encoder.mid.attn" in key]
paths = renew_vae_attention_paths(mid_attentions)
meta_path = {"old": "mid.attn_1", "new": "mid_block.attentions.0"}
assign_to_checkpoint(
paths,
new_checkpoint,
vae_state_dict,
additional_replacements=[meta_path],
num_head_channels=num_head_channels, # not used in vae
)
conv_attn_to_linear(new_checkpoint)
for i in range(num_up_blocks):
block_id = num_up_blocks - 1 - i
resnets = [
key for key in up_blocks[block_id] if f"up.{block_id}" in key and f"up.{block_id}.upsample" not in key
]
if f"decoder.up.{block_id}.upsample.conv.weight" in vae_state_dict:
new_checkpoint[f"decoder.up_blocks.{i}.upsamplers.0.conv.weight"] = vae_state_dict[
f"decoder.up.{block_id}.upsample.conv.weight"
]
new_checkpoint[f"decoder.up_blocks.{i}.upsamplers.0.conv.bias"] = vae_state_dict[
f"decoder.up.{block_id}.upsample.conv.bias"
]
paths = renew_vae_resnet_paths(resnets)
meta_path = {"old": f"up.{block_id}.block", "new": f"up_blocks.{i}.resnets"}
assign_to_checkpoint(
paths,
new_checkpoint,
vae_state_dict,
additional_replacements=[meta_path],
num_head_channels=num_head_channels, # not used in vae
)
mid_resnets = [key for key in vae_state_dict if "decoder.mid.block" in key]
num_mid_res_blocks = 2
for i in range(1, num_mid_res_blocks + 1):
resnets = [key for key in mid_resnets if f"decoder.mid.block_{i}" in key]
paths = renew_vae_resnet_paths(resnets)
meta_path = {"old": f"mid.block_{i}", "new": f"mid_block.resnets.{i - 1}"}
assign_to_checkpoint(
paths,
new_checkpoint,
vae_state_dict,
additional_replacements=[meta_path],
num_head_channels=num_head_channels, # not used in vae
)
mid_attentions = [key for key in vae_state_dict if "decoder.mid.attn" in key]
paths = renew_vae_attention_paths(mid_attentions)
meta_path = {"old": "mid.attn_1", "new": "mid_block.attentions.0"}
assign_to_checkpoint(
paths,
new_checkpoint,
vae_state_dict,
additional_replacements=[meta_path],
num_head_channels=num_head_channels, # not used in vae
)
conv_attn_to_linear(new_checkpoint)
missing_keys, unexpected_keys = diffusers_model.load_state_dict(new_checkpoint)
for missing_key in missing_keys:
print(f"Missing key: {missing_key}")
for unexpected_key in unexpected_keys:
print(f"Unexpected key: {unexpected_key}")
return diffusers_model
def convert_uvit_block_to_diffusers_block(
uvit_state_dict,
new_state_dict,
block_prefix,
new_prefix="transformer.transformer_",
skip_connection=False,
):
"""
Maps the keys in a UniDiffuser transformer block (`Block`) to the keys in a diffusers transformer block
(`UTransformerBlock`/`UniDiffuserBlock`).
"""
prefix = new_prefix + block_prefix
if skip_connection:
new_state_dict[prefix + ".skip.skip_linear.weight"] = uvit_state_dict[block_prefix + ".skip_linear.weight"]
new_state_dict[prefix + ".skip.skip_linear.bias"] = uvit_state_dict[block_prefix + ".skip_linear.bias"]
new_state_dict[prefix + ".skip.norm.weight"] = uvit_state_dict[block_prefix + ".norm1.weight"]
new_state_dict[prefix + ".skip.norm.bias"] = uvit_state_dict[block_prefix + ".norm1.bias"]
# Create the prefix string for out_blocks.
prefix += ".block"
# Split up attention qkv.weight into to_q.weight, to_k.weight, to_v.weight
qkv = uvit_state_dict[block_prefix + ".attn.qkv.weight"]
new_attn_keys = [".attn1.to_q.weight", ".attn1.to_k.weight", ".attn1.to_v.weight"]
new_attn_keys = [prefix + key for key in new_attn_keys]
shape = qkv.shape[0] // len(new_attn_keys)
for i, attn_key in enumerate(new_attn_keys):
new_state_dict[attn_key] = qkv[i * shape : (i + 1) * shape]
new_state_dict[prefix + ".attn1.to_out.0.weight"] = uvit_state_dict[block_prefix + ".attn.proj.weight"]
new_state_dict[prefix + ".attn1.to_out.0.bias"] = uvit_state_dict[block_prefix + ".attn.proj.bias"]
new_state_dict[prefix + ".norm1.weight"] = uvit_state_dict[block_prefix + ".norm2.weight"]
new_state_dict[prefix + ".norm1.bias"] = uvit_state_dict[block_prefix + ".norm2.bias"]
new_state_dict[prefix + ".ff.net.0.proj.weight"] = uvit_state_dict[block_prefix + ".mlp.fc1.weight"]
new_state_dict[prefix + ".ff.net.0.proj.bias"] = uvit_state_dict[block_prefix + ".mlp.fc1.bias"]
new_state_dict[prefix + ".ff.net.2.weight"] = uvit_state_dict[block_prefix + ".mlp.fc2.weight"]
new_state_dict[prefix + ".ff.net.2.bias"] = uvit_state_dict[block_prefix + ".mlp.fc2.bias"]
new_state_dict[prefix + ".norm3.weight"] = uvit_state_dict[block_prefix + ".norm3.weight"]
new_state_dict[prefix + ".norm3.bias"] = uvit_state_dict[block_prefix + ".norm3.bias"]
return uvit_state_dict, new_state_dict
def convert_uvit_to_diffusers(ckpt, diffusers_model):
"""
Converts a UniDiffuser uvit_v*.pth checkpoint to a diffusers UniDiffusersModel.
"""
# uvit_v*.pth ckpt is a torch state dict
uvit_state_dict = torch.load(ckpt, map_location="cpu")
new_state_dict = {}
# Input layers
new_state_dict["vae_img_in.proj.weight"] = uvit_state_dict["patch_embed.proj.weight"]
new_state_dict["vae_img_in.proj.bias"] = uvit_state_dict["patch_embed.proj.bias"]
new_state_dict["clip_img_in.weight"] = uvit_state_dict["clip_img_embed.weight"]
new_state_dict["clip_img_in.bias"] = uvit_state_dict["clip_img_embed.bias"]
new_state_dict["text_in.weight"] = uvit_state_dict["text_embed.weight"]
new_state_dict["text_in.bias"] = uvit_state_dict["text_embed.bias"]
new_state_dict["pos_embed"] = uvit_state_dict["pos_embed"]
# Handle data type token embeddings for UniDiffuser-v1
if "token_embedding.weight" in uvit_state_dict and diffusers_model.use_data_type_embedding:
new_state_dict["data_type_pos_embed_token"] = uvit_state_dict["pos_embed_token"]
new_state_dict["data_type_token_embedding.weight"] = uvit_state_dict["token_embedding.weight"]
# Also initialize the PatchEmbedding in UTransformer2DModel with the PatchEmbedding from the checkpoint.
# This isn't used in the current implementation, so might want to remove.
new_state_dict["transformer.pos_embed.proj.weight"] = uvit_state_dict["patch_embed.proj.weight"]
new_state_dict["transformer.pos_embed.proj.bias"] = uvit_state_dict["patch_embed.proj.bias"]
# Output layers
new_state_dict["transformer.norm_out.weight"] = uvit_state_dict["norm.weight"]
new_state_dict["transformer.norm_out.bias"] = uvit_state_dict["norm.bias"]
new_state_dict["vae_img_out.weight"] = uvit_state_dict["decoder_pred.weight"]
new_state_dict["vae_img_out.bias"] = uvit_state_dict["decoder_pred.bias"]
new_state_dict["clip_img_out.weight"] = uvit_state_dict["clip_img_out.weight"]
new_state_dict["clip_img_out.bias"] = uvit_state_dict["clip_img_out.bias"]
new_state_dict["text_out.weight"] = uvit_state_dict["text_out.weight"]
new_state_dict["text_out.bias"] = uvit_state_dict["text_out.bias"]
# in_blocks
in_blocks_prefixes = {".".join(layer.split(".")[:2]) for layer in uvit_state_dict if "in_blocks" in layer}
for in_block_prefix in list(in_blocks_prefixes):
convert_uvit_block_to_diffusers_block(uvit_state_dict, new_state_dict, in_block_prefix)
# mid_block
# Assume there's only one mid block
convert_uvit_block_to_diffusers_block(uvit_state_dict, new_state_dict, "mid_block")
# out_blocks
out_blocks_prefixes = {".".join(layer.split(".")[:2]) for layer in uvit_state_dict if "out_blocks" in layer}
for out_block_prefix in list(out_blocks_prefixes):
convert_uvit_block_to_diffusers_block(uvit_state_dict, new_state_dict, out_block_prefix, skip_connection=True)
missing_keys, unexpected_keys = diffusers_model.load_state_dict(new_state_dict)
for missing_key in missing_keys:
print(f"Missing key: {missing_key}")
for unexpected_key in unexpected_keys:
print(f"Unexpected key: {unexpected_key}")
return diffusers_model
def convert_caption_decoder_to_diffusers(ckpt, diffusers_model):
"""
Converts a UniDiffuser caption_decoder.pth checkpoint to a diffusers UniDiffuserTextDecoder.
"""
# caption_decoder.pth ckpt is a torch state dict
checkpoint_state_dict = torch.load(ckpt, map_location="cpu")
decoder_state_dict = {}
# Remove the "module." prefix, if necessary
caption_decoder_key = "module."
for key in checkpoint_state_dict:
if key.startswith(caption_decoder_key):
decoder_state_dict[key.replace(caption_decoder_key, "")] = checkpoint_state_dict.get(key)
else:
decoder_state_dict[key] = checkpoint_state_dict.get(key)
new_state_dict = {}
# Encoder and Decoder
new_state_dict["encode_prefix.weight"] = decoder_state_dict["encode_prefix.weight"]
new_state_dict["encode_prefix.bias"] = decoder_state_dict["encode_prefix.bias"]
new_state_dict["decode_prefix.weight"] = decoder_state_dict["decode_prefix.weight"]
new_state_dict["decode_prefix.bias"] = decoder_state_dict["decode_prefix.bias"]
# Internal GPT2LMHeadModel transformer model
for key, val in decoder_state_dict.items():
if key.startswith("gpt"):
suffix = key[len("gpt") :]
new_state_dict["transformer" + suffix] = val
missing_keys, unexpected_keys = diffusers_model.load_state_dict(new_state_dict)
for missing_key in missing_keys:
print(f"Missing key: {missing_key}")
for unexpected_key in unexpected_keys:
print(f"Unexpected key: {unexpected_key}")
return diffusers_model
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument(
"--caption_decoder_checkpoint_path",
default=None,
type=str,
required=False,
help="Path to caption decoder checkpoint to convert.",
)
parser.add_argument(
"--uvit_checkpoint_path", default=None, type=str, required=False, help="Path to U-ViT checkpoint to convert."
)
parser.add_argument(
"--vae_checkpoint_path",
default=None,
type=str,
required=False,
help="Path to VAE checkpoint to convert.",
)
parser.add_argument(
"--pipeline_output_path",
default=None,
type=str,
required=True,
help="Path to save the output pipeline to.",
)
parser.add_argument(
"--config_type",
default="test",
type=str,
help=(
"Config type to use. Should be 'test' to create small models for testing or 'big' to convert a full"
" checkpoint."
),
)
parser.add_argument(
"--version",
default=0,
type=int,
help="The UniDiffuser model type to convert to. Should be 0 for UniDiffuser-v0 and 1 for UniDiffuser-v1.",
)
args = parser.parse_args()
# Convert the VAE model.
if args.vae_checkpoint_path is not None:
vae_config = create_vae_diffusers_config(args.config_type)
vae = AutoencoderKL(**vae_config)
vae = convert_vae_to_diffusers(args.vae_checkpoint_path, vae)
# Convert the U-ViT ("unet") model.
if args.uvit_checkpoint_path is not None:
unet_config = create_unidiffuser_unet_config(args.config_type, args.version)
unet = UniDiffuserModel(**unet_config)
unet = convert_uvit_to_diffusers(args.uvit_checkpoint_path, unet)
# Convert the caption decoder ("text_decoder") model.
if args.caption_decoder_checkpoint_path is not None:
text_decoder_config = create_text_decoder_config(args.config_type)
text_decoder = UniDiffuserTextDecoder(**text_decoder_config)
text_decoder = convert_caption_decoder_to_diffusers(args.caption_decoder_checkpoint_path, text_decoder)
# Scheduler is the same for both the test and big models.
scheduler_config = SCHEDULER_CONFIG
scheduler = DPMSolverMultistepScheduler(
beta_start=scheduler_config.beta_start,
beta_end=scheduler_config.beta_end,
beta_schedule=scheduler_config.beta_schedule,
solver_order=scheduler_config.solver_order,
)
if args.config_type == "test":
# Make a small random CLIPTextModel
torch.manual_seed(0)
clip_text_encoder_config = CLIPTextConfig(
bos_token_id=0,
eos_token_id=2,
hidden_size=32,
intermediate_size=37,
layer_norm_eps=1e-05,
num_attention_heads=4,
num_hidden_layers=5,
pad_token_id=1,
vocab_size=1000,
)
text_encoder = CLIPTextModel(clip_text_encoder_config)
clip_tokenizer = CLIPTokenizer.from_pretrained("hf-internal-testing/tiny-random-clip")
# Make a small random CLIPVisionModel and accompanying CLIPImageProcessor
torch.manual_seed(0)
clip_image_encoder_config = CLIPVisionConfig(
image_size=32,
patch_size=2,
num_channels=3,
hidden_size=32,
projection_dim=32,
num_hidden_layers=5,
num_attention_heads=4,
intermediate_size=37,
dropout=0.1,
attention_dropout=0.1,
initializer_range=0.02,
)
image_encoder = CLIPVisionModelWithProjection(clip_image_encoder_config)
image_processor = CLIPImageProcessor(crop_size=32, size=32)
# Note that the text_decoder should already have its token embeddings resized.
text_tokenizer = GPT2Tokenizer.from_pretrained("hf-internal-testing/tiny-random-GPT2Model")
eos = "<|EOS|>"
special_tokens_dict = {"eos_token": eos}
text_tokenizer.add_special_tokens(special_tokens_dict)
elif args.config_type == "big":
text_encoder = CLIPTextModel.from_pretrained("openai/clip-vit-large-patch14")
clip_tokenizer = CLIPTokenizer.from_pretrained("openai/clip-vit-large-patch14")
image_encoder = CLIPVisionModelWithProjection.from_pretrained("openai/clip-vit-base-patch32")
image_processor = CLIPImageProcessor.from_pretrained("openai/clip-vit-base-patch32")
# Note that the text_decoder should already have its token embeddings resized.
text_tokenizer = GPT2Tokenizer.from_pretrained("gpt2")
eos = "<|EOS|>"
special_tokens_dict = {"eos_token": eos}
text_tokenizer.add_special_tokens(special_tokens_dict)
else:
raise NotImplementedError(
f"Config type {args.config_type} is not implemented, currently only config types"
" 'test' and 'big' are available."
)
pipeline = UniDiffuserPipeline(
vae=vae,
text_encoder=text_encoder,
image_encoder=image_encoder,
image_processor=image_processor,
clip_tokenizer=clip_tokenizer,
text_decoder=text_decoder,
text_tokenizer=text_tokenizer,
unet=unet,
scheduler=scheduler,
)
pipeline.save_pretrained(args.pipeline_output_path)
| 0 |
hf_public_repos/diffusers | hf_public_repos/diffusers/scripts/convert_vae_diff_to_onnx.py | # Copyright 2022 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import argparse
from pathlib import Path
import torch
from packaging import version
from torch.onnx import export
from diffusers import AutoencoderKL
is_torch_less_than_1_11 = version.parse(version.parse(torch.__version__).base_version) < version.parse("1.11")
def onnx_export(
model,
model_args: tuple,
output_path: Path,
ordered_input_names,
output_names,
dynamic_axes,
opset,
use_external_data_format=False,
):
output_path.parent.mkdir(parents=True, exist_ok=True)
# PyTorch deprecated the `enable_onnx_checker` and `use_external_data_format` arguments in v1.11,
# so we check the torch version for backwards compatibility
if is_torch_less_than_1_11:
export(
model,
model_args,
f=output_path.as_posix(),
input_names=ordered_input_names,
output_names=output_names,
dynamic_axes=dynamic_axes,
do_constant_folding=True,
use_external_data_format=use_external_data_format,
enable_onnx_checker=True,
opset_version=opset,
)
else:
export(
model,
model_args,
f=output_path.as_posix(),
input_names=ordered_input_names,
output_names=output_names,
dynamic_axes=dynamic_axes,
do_constant_folding=True,
opset_version=opset,
)
@torch.no_grad()
def convert_models(model_path: str, output_path: str, opset: int, fp16: bool = False):
dtype = torch.float16 if fp16 else torch.float32
if fp16 and torch.cuda.is_available():
device = "cuda"
elif fp16 and not torch.cuda.is_available():
raise ValueError("`float16` model export is only supported on GPUs with CUDA")
else:
device = "cpu"
output_path = Path(output_path)
# VAE DECODER
vae_decoder = AutoencoderKL.from_pretrained(model_path + "/vae")
vae_latent_channels = vae_decoder.config.latent_channels
# forward only through the decoder part
vae_decoder.forward = vae_decoder.decode
onnx_export(
vae_decoder,
model_args=(
torch.randn(1, vae_latent_channels, 25, 25).to(device=device, dtype=dtype),
False,
),
output_path=output_path / "vae_decoder" / "model.onnx",
ordered_input_names=["latent_sample", "return_dict"],
output_names=["sample"],
dynamic_axes={
"latent_sample": {0: "batch", 1: "channels", 2: "height", 3: "width"},
},
opset=opset,
)
del vae_decoder
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument(
"--model_path",
type=str,
required=True,
help="Path to the `diffusers` checkpoint to convert (either a local directory or on the Hub).",
)
parser.add_argument("--output_path", type=str, required=True, help="Path to the output model.")
parser.add_argument(
"--opset",
default=14,
type=int,
help="The version of the ONNX operator set to use.",
)
parser.add_argument("--fp16", action="store_true", default=False, help="Export the models in `float16` mode")
args = parser.parse_args()
print(args.output_path)
convert_models(args.model_path, args.output_path, args.opset, args.fp16)
print("SD: Done: ONNX")
| 0 |
hf_public_repos/diffusers | hf_public_repos/diffusers/scripts/convert_vae_pt_to_diffusers.py | import argparse
import io
import requests
import torch
from omegaconf import OmegaConf
from diffusers import AutoencoderKL
from diffusers.pipelines.stable_diffusion.convert_from_ckpt import (
assign_to_checkpoint,
conv_attn_to_linear,
create_vae_diffusers_config,
renew_vae_attention_paths,
renew_vae_resnet_paths,
)
def custom_convert_ldm_vae_checkpoint(checkpoint, config):
vae_state_dict = checkpoint
new_checkpoint = {}
new_checkpoint["encoder.conv_in.weight"] = vae_state_dict["encoder.conv_in.weight"]
new_checkpoint["encoder.conv_in.bias"] = vae_state_dict["encoder.conv_in.bias"]
new_checkpoint["encoder.conv_out.weight"] = vae_state_dict["encoder.conv_out.weight"]
new_checkpoint["encoder.conv_out.bias"] = vae_state_dict["encoder.conv_out.bias"]
new_checkpoint["encoder.conv_norm_out.weight"] = vae_state_dict["encoder.norm_out.weight"]
new_checkpoint["encoder.conv_norm_out.bias"] = vae_state_dict["encoder.norm_out.bias"]
new_checkpoint["decoder.conv_in.weight"] = vae_state_dict["decoder.conv_in.weight"]
new_checkpoint["decoder.conv_in.bias"] = vae_state_dict["decoder.conv_in.bias"]
new_checkpoint["decoder.conv_out.weight"] = vae_state_dict["decoder.conv_out.weight"]
new_checkpoint["decoder.conv_out.bias"] = vae_state_dict["decoder.conv_out.bias"]
new_checkpoint["decoder.conv_norm_out.weight"] = vae_state_dict["decoder.norm_out.weight"]
new_checkpoint["decoder.conv_norm_out.bias"] = vae_state_dict["decoder.norm_out.bias"]
new_checkpoint["quant_conv.weight"] = vae_state_dict["quant_conv.weight"]
new_checkpoint["quant_conv.bias"] = vae_state_dict["quant_conv.bias"]
new_checkpoint["post_quant_conv.weight"] = vae_state_dict["post_quant_conv.weight"]
new_checkpoint["post_quant_conv.bias"] = vae_state_dict["post_quant_conv.bias"]
# Retrieves the keys for the encoder down blocks only
num_down_blocks = len({".".join(layer.split(".")[:3]) for layer in vae_state_dict if "encoder.down" in layer})
down_blocks = {
layer_id: [key for key in vae_state_dict if f"down.{layer_id}" in key] for layer_id in range(num_down_blocks)
}
# Retrieves the keys for the decoder up blocks only
num_up_blocks = len({".".join(layer.split(".")[:3]) for layer in vae_state_dict if "decoder.up" in layer})
up_blocks = {
layer_id: [key for key in vae_state_dict if f"up.{layer_id}" in key] for layer_id in range(num_up_blocks)
}
for i in range(num_down_blocks):
resnets = [key for key in down_blocks[i] if f"down.{i}" in key and f"down.{i}.downsample" not in key]
if f"encoder.down.{i}.downsample.conv.weight" in vae_state_dict:
new_checkpoint[f"encoder.down_blocks.{i}.downsamplers.0.conv.weight"] = vae_state_dict.pop(
f"encoder.down.{i}.downsample.conv.weight"
)
new_checkpoint[f"encoder.down_blocks.{i}.downsamplers.0.conv.bias"] = vae_state_dict.pop(
f"encoder.down.{i}.downsample.conv.bias"
)
paths = renew_vae_resnet_paths(resnets)
meta_path = {"old": f"down.{i}.block", "new": f"down_blocks.{i}.resnets"}
assign_to_checkpoint(paths, new_checkpoint, vae_state_dict, additional_replacements=[meta_path], config=config)
mid_resnets = [key for key in vae_state_dict if "encoder.mid.block" in key]
num_mid_res_blocks = 2
for i in range(1, num_mid_res_blocks + 1):
resnets = [key for key in mid_resnets if f"encoder.mid.block_{i}" in key]
paths = renew_vae_resnet_paths(resnets)
meta_path = {"old": f"mid.block_{i}", "new": f"mid_block.resnets.{i - 1}"}
assign_to_checkpoint(paths, new_checkpoint, vae_state_dict, additional_replacements=[meta_path], config=config)
mid_attentions = [key for key in vae_state_dict if "encoder.mid.attn" in key]
paths = renew_vae_attention_paths(mid_attentions)
meta_path = {"old": "mid.attn_1", "new": "mid_block.attentions.0"}
assign_to_checkpoint(paths, new_checkpoint, vae_state_dict, additional_replacements=[meta_path], config=config)
conv_attn_to_linear(new_checkpoint)
for i in range(num_up_blocks):
block_id = num_up_blocks - 1 - i
resnets = [
key for key in up_blocks[block_id] if f"up.{block_id}" in key and f"up.{block_id}.upsample" not in key
]
if f"decoder.up.{block_id}.upsample.conv.weight" in vae_state_dict:
new_checkpoint[f"decoder.up_blocks.{i}.upsamplers.0.conv.weight"] = vae_state_dict[
f"decoder.up.{block_id}.upsample.conv.weight"
]
new_checkpoint[f"decoder.up_blocks.{i}.upsamplers.0.conv.bias"] = vae_state_dict[
f"decoder.up.{block_id}.upsample.conv.bias"
]
paths = renew_vae_resnet_paths(resnets)
meta_path = {"old": f"up.{block_id}.block", "new": f"up_blocks.{i}.resnets"}
assign_to_checkpoint(paths, new_checkpoint, vae_state_dict, additional_replacements=[meta_path], config=config)
mid_resnets = [key for key in vae_state_dict if "decoder.mid.block" in key]
num_mid_res_blocks = 2
for i in range(1, num_mid_res_blocks + 1):
resnets = [key for key in mid_resnets if f"decoder.mid.block_{i}" in key]
paths = renew_vae_resnet_paths(resnets)
meta_path = {"old": f"mid.block_{i}", "new": f"mid_block.resnets.{i - 1}"}
assign_to_checkpoint(paths, new_checkpoint, vae_state_dict, additional_replacements=[meta_path], config=config)
mid_attentions = [key for key in vae_state_dict if "decoder.mid.attn" in key]
paths = renew_vae_attention_paths(mid_attentions)
meta_path = {"old": "mid.attn_1", "new": "mid_block.attentions.0"}
assign_to_checkpoint(paths, new_checkpoint, vae_state_dict, additional_replacements=[meta_path], config=config)
conv_attn_to_linear(new_checkpoint)
return new_checkpoint
def vae_pt_to_vae_diffuser(
checkpoint_path: str,
output_path: str,
):
# Only support V1
r = requests.get(
" https://raw.githubusercontent.com/CompVis/stable-diffusion/main/configs/stable-diffusion/v1-inference.yaml"
)
io_obj = io.BytesIO(r.content)
original_config = OmegaConf.load(io_obj)
image_size = 512
device = "cuda" if torch.cuda.is_available() else "cpu"
if checkpoint_path.endswith("safetensors"):
from safetensors import safe_open
checkpoint = {}
with safe_open(checkpoint_path, framework="pt", device="cpu") as f:
for key in f.keys():
checkpoint[key] = f.get_tensor(key)
else:
checkpoint = torch.load(checkpoint_path, map_location=device)["state_dict"]
# Convert the VAE model.
vae_config = create_vae_diffusers_config(original_config, image_size=image_size)
converted_vae_checkpoint = custom_convert_ldm_vae_checkpoint(checkpoint, vae_config)
vae = AutoencoderKL(**vae_config)
vae.load_state_dict(converted_vae_checkpoint)
vae.save_pretrained(output_path)
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument("--vae_pt_path", default=None, type=str, required=True, help="Path to the VAE.pt to convert.")
parser.add_argument("--dump_path", default=None, type=str, required=True, help="Path to the VAE.pt to convert.")
args = parser.parse_args()
vae_pt_to_vae_diffuser(args.vae_pt_path, args.dump_path)
| 0 |
hf_public_repos/diffusers | hf_public_repos/diffusers/scripts/convert_music_spectrogram_to_diffusers.py | #!/usr/bin/env python3
import argparse
import os
import jax as jnp
import numpy as onp
import torch
import torch.nn as nn
from music_spectrogram_diffusion import inference
from t5x import checkpoints
from diffusers import DDPMScheduler, OnnxRuntimeModel, SpectrogramDiffusionPipeline
from diffusers.pipelines.spectrogram_diffusion import SpectrogramContEncoder, SpectrogramNotesEncoder, T5FilmDecoder
MODEL = "base_with_context"
def load_notes_encoder(weights, model):
model.token_embedder.weight = nn.Parameter(torch.FloatTensor(weights["token_embedder"]["embedding"]))
model.position_encoding.weight = nn.Parameter(
torch.FloatTensor(weights["Embed_0"]["embedding"]), requires_grad=False
)
for lyr_num, lyr in enumerate(model.encoders):
ly_weight = weights[f"layers_{lyr_num}"]
lyr.layer[0].layer_norm.weight = nn.Parameter(
torch.FloatTensor(ly_weight["pre_attention_layer_norm"]["scale"])
)
attention_weights = ly_weight["attention"]
lyr.layer[0].SelfAttention.q.weight = nn.Parameter(torch.FloatTensor(attention_weights["query"]["kernel"].T))
lyr.layer[0].SelfAttention.k.weight = nn.Parameter(torch.FloatTensor(attention_weights["key"]["kernel"].T))
lyr.layer[0].SelfAttention.v.weight = nn.Parameter(torch.FloatTensor(attention_weights["value"]["kernel"].T))
lyr.layer[0].SelfAttention.o.weight = nn.Parameter(torch.FloatTensor(attention_weights["out"]["kernel"].T))
lyr.layer[1].layer_norm.weight = nn.Parameter(torch.FloatTensor(ly_weight["pre_mlp_layer_norm"]["scale"]))
lyr.layer[1].DenseReluDense.wi_0.weight = nn.Parameter(torch.FloatTensor(ly_weight["mlp"]["wi_0"]["kernel"].T))
lyr.layer[1].DenseReluDense.wi_1.weight = nn.Parameter(torch.FloatTensor(ly_weight["mlp"]["wi_1"]["kernel"].T))
lyr.layer[1].DenseReluDense.wo.weight = nn.Parameter(torch.FloatTensor(ly_weight["mlp"]["wo"]["kernel"].T))
model.layer_norm.weight = nn.Parameter(torch.FloatTensor(weights["encoder_norm"]["scale"]))
return model
def load_continuous_encoder(weights, model):
model.input_proj.weight = nn.Parameter(torch.FloatTensor(weights["input_proj"]["kernel"].T))
model.position_encoding.weight = nn.Parameter(
torch.FloatTensor(weights["Embed_0"]["embedding"]), requires_grad=False
)
for lyr_num, lyr in enumerate(model.encoders):
ly_weight = weights[f"layers_{lyr_num}"]
attention_weights = ly_weight["attention"]
lyr.layer[0].SelfAttention.q.weight = nn.Parameter(torch.FloatTensor(attention_weights["query"]["kernel"].T))
lyr.layer[0].SelfAttention.k.weight = nn.Parameter(torch.FloatTensor(attention_weights["key"]["kernel"].T))
lyr.layer[0].SelfAttention.v.weight = nn.Parameter(torch.FloatTensor(attention_weights["value"]["kernel"].T))
lyr.layer[0].SelfAttention.o.weight = nn.Parameter(torch.FloatTensor(attention_weights["out"]["kernel"].T))
lyr.layer[0].layer_norm.weight = nn.Parameter(
torch.FloatTensor(ly_weight["pre_attention_layer_norm"]["scale"])
)
lyr.layer[1].DenseReluDense.wi_0.weight = nn.Parameter(torch.FloatTensor(ly_weight["mlp"]["wi_0"]["kernel"].T))
lyr.layer[1].DenseReluDense.wi_1.weight = nn.Parameter(torch.FloatTensor(ly_weight["mlp"]["wi_1"]["kernel"].T))
lyr.layer[1].DenseReluDense.wo.weight = nn.Parameter(torch.FloatTensor(ly_weight["mlp"]["wo"]["kernel"].T))
lyr.layer[1].layer_norm.weight = nn.Parameter(torch.FloatTensor(ly_weight["pre_mlp_layer_norm"]["scale"]))
model.layer_norm.weight = nn.Parameter(torch.FloatTensor(weights["encoder_norm"]["scale"]))
return model
def load_decoder(weights, model):
model.conditioning_emb[0].weight = nn.Parameter(torch.FloatTensor(weights["time_emb_dense0"]["kernel"].T))
model.conditioning_emb[2].weight = nn.Parameter(torch.FloatTensor(weights["time_emb_dense1"]["kernel"].T))
model.position_encoding.weight = nn.Parameter(
torch.FloatTensor(weights["Embed_0"]["embedding"]), requires_grad=False
)
model.continuous_inputs_projection.weight = nn.Parameter(
torch.FloatTensor(weights["continuous_inputs_projection"]["kernel"].T)
)
for lyr_num, lyr in enumerate(model.decoders):
ly_weight = weights[f"layers_{lyr_num}"]
lyr.layer[0].layer_norm.weight = nn.Parameter(
torch.FloatTensor(ly_weight["pre_self_attention_layer_norm"]["scale"])
)
lyr.layer[0].FiLMLayer.scale_bias.weight = nn.Parameter(
torch.FloatTensor(ly_weight["FiLMLayer_0"]["DenseGeneral_0"]["kernel"].T)
)
attention_weights = ly_weight["self_attention"]
lyr.layer[0].attention.to_q.weight = nn.Parameter(torch.FloatTensor(attention_weights["query"]["kernel"].T))
lyr.layer[0].attention.to_k.weight = nn.Parameter(torch.FloatTensor(attention_weights["key"]["kernel"].T))
lyr.layer[0].attention.to_v.weight = nn.Parameter(torch.FloatTensor(attention_weights["value"]["kernel"].T))
lyr.layer[0].attention.to_out[0].weight = nn.Parameter(torch.FloatTensor(attention_weights["out"]["kernel"].T))
attention_weights = ly_weight["MultiHeadDotProductAttention_0"]
lyr.layer[1].attention.to_q.weight = nn.Parameter(torch.FloatTensor(attention_weights["query"]["kernel"].T))
lyr.layer[1].attention.to_k.weight = nn.Parameter(torch.FloatTensor(attention_weights["key"]["kernel"].T))
lyr.layer[1].attention.to_v.weight = nn.Parameter(torch.FloatTensor(attention_weights["value"]["kernel"].T))
lyr.layer[1].attention.to_out[0].weight = nn.Parameter(torch.FloatTensor(attention_weights["out"]["kernel"].T))
lyr.layer[1].layer_norm.weight = nn.Parameter(
torch.FloatTensor(ly_weight["pre_cross_attention_layer_norm"]["scale"])
)
lyr.layer[2].layer_norm.weight = nn.Parameter(torch.FloatTensor(ly_weight["pre_mlp_layer_norm"]["scale"]))
lyr.layer[2].film.scale_bias.weight = nn.Parameter(
torch.FloatTensor(ly_weight["FiLMLayer_1"]["DenseGeneral_0"]["kernel"].T)
)
lyr.layer[2].DenseReluDense.wi_0.weight = nn.Parameter(torch.FloatTensor(ly_weight["mlp"]["wi_0"]["kernel"].T))
lyr.layer[2].DenseReluDense.wi_1.weight = nn.Parameter(torch.FloatTensor(ly_weight["mlp"]["wi_1"]["kernel"].T))
lyr.layer[2].DenseReluDense.wo.weight = nn.Parameter(torch.FloatTensor(ly_weight["mlp"]["wo"]["kernel"].T))
model.decoder_norm.weight = nn.Parameter(torch.FloatTensor(weights["decoder_norm"]["scale"]))
model.spec_out.weight = nn.Parameter(torch.FloatTensor(weights["spec_out_dense"]["kernel"].T))
return model
def main(args):
t5_checkpoint = checkpoints.load_t5x_checkpoint(args.checkpoint_path)
t5_checkpoint = jnp.tree_util.tree_map(onp.array, t5_checkpoint)
gin_overrides = [
"from __gin__ import dynamic_registration",
"from music_spectrogram_diffusion.models.diffusion import diffusion_utils",
"diffusion_utils.ClassifierFreeGuidanceConfig.eval_condition_weight = 2.0",
"diffusion_utils.DiffusionConfig.classifier_free_guidance = @diffusion_utils.ClassifierFreeGuidanceConfig()",
]
gin_file = os.path.join(args.checkpoint_path, "..", "config.gin")
gin_config = inference.parse_training_gin_file(gin_file, gin_overrides)
synth_model = inference.InferenceModel(args.checkpoint_path, gin_config)
scheduler = DDPMScheduler(beta_schedule="squaredcos_cap_v2", variance_type="fixed_large")
notes_encoder = SpectrogramNotesEncoder(
max_length=synth_model.sequence_length["inputs"],
vocab_size=synth_model.model.module.config.vocab_size,
d_model=synth_model.model.module.config.emb_dim,
dropout_rate=synth_model.model.module.config.dropout_rate,
num_layers=synth_model.model.module.config.num_encoder_layers,
num_heads=synth_model.model.module.config.num_heads,
d_kv=synth_model.model.module.config.head_dim,
d_ff=synth_model.model.module.config.mlp_dim,
feed_forward_proj="gated-gelu",
)
continuous_encoder = SpectrogramContEncoder(
input_dims=synth_model.audio_codec.n_dims,
targets_context_length=synth_model.sequence_length["targets_context"],
d_model=synth_model.model.module.config.emb_dim,
dropout_rate=synth_model.model.module.config.dropout_rate,
num_layers=synth_model.model.module.config.num_encoder_layers,
num_heads=synth_model.model.module.config.num_heads,
d_kv=synth_model.model.module.config.head_dim,
d_ff=synth_model.model.module.config.mlp_dim,
feed_forward_proj="gated-gelu",
)
decoder = T5FilmDecoder(
input_dims=synth_model.audio_codec.n_dims,
targets_length=synth_model.sequence_length["targets_context"],
max_decoder_noise_time=synth_model.model.module.config.max_decoder_noise_time,
d_model=synth_model.model.module.config.emb_dim,
num_layers=synth_model.model.module.config.num_decoder_layers,
num_heads=synth_model.model.module.config.num_heads,
d_kv=synth_model.model.module.config.head_dim,
d_ff=synth_model.model.module.config.mlp_dim,
dropout_rate=synth_model.model.module.config.dropout_rate,
)
notes_encoder = load_notes_encoder(t5_checkpoint["target"]["token_encoder"], notes_encoder)
continuous_encoder = load_continuous_encoder(t5_checkpoint["target"]["continuous_encoder"], continuous_encoder)
decoder = load_decoder(t5_checkpoint["target"]["decoder"], decoder)
melgan = OnnxRuntimeModel.from_pretrained("kashif/soundstream_mel_decoder")
pipe = SpectrogramDiffusionPipeline(
notes_encoder=notes_encoder,
continuous_encoder=continuous_encoder,
decoder=decoder,
scheduler=scheduler,
melgan=melgan,
)
if args.save:
pipe.save_pretrained(args.output_path)
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument("--output_path", default=None, type=str, required=True, help="Path to the converted model.")
parser.add_argument(
"--save", default=True, type=bool, required=False, help="Whether to save the converted model or not."
)
parser.add_argument(
"--checkpoint_path",
default=f"{MODEL}/checkpoint_500000",
type=str,
required=False,
help="Path to the original jax model checkpoint.",
)
args = parser.parse_args()
main(args)
| 0 |
hf_public_repos/diffusers | hf_public_repos/diffusers/scripts/convert_unclip_txt2img_to_image_variation.py | import argparse
from transformers import CLIPImageProcessor, CLIPVisionModelWithProjection
from diffusers import UnCLIPImageVariationPipeline, UnCLIPPipeline
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument("--dump_path", default=None, type=str, required=True, help="Path to the output model.")
parser.add_argument(
"--txt2img_unclip",
default="kakaobrain/karlo-v1-alpha",
type=str,
required=False,
help="The pretrained txt2img unclip.",
)
args = parser.parse_args()
txt2img = UnCLIPPipeline.from_pretrained(args.txt2img_unclip)
feature_extractor = CLIPImageProcessor()
image_encoder = CLIPVisionModelWithProjection.from_pretrained("openai/clip-vit-large-patch14")
img2img = UnCLIPImageVariationPipeline(
decoder=txt2img.decoder,
text_encoder=txt2img.text_encoder,
tokenizer=txt2img.tokenizer,
text_proj=txt2img.text_proj,
feature_extractor=feature_extractor,
image_encoder=image_encoder,
super_res_first=txt2img.super_res_first,
super_res_last=txt2img.super_res_last,
decoder_scheduler=txt2img.decoder_scheduler,
super_res_scheduler=txt2img.super_res_scheduler,
)
img2img.save_pretrained(args.dump_path)
| 0 |
hf_public_repos/diffusers | hf_public_repos/diffusers/scripts/convert_consistency_to_diffusers.py | import argparse
import os
import torch
from diffusers import (
CMStochasticIterativeScheduler,
ConsistencyModelPipeline,
UNet2DModel,
)
TEST_UNET_CONFIG = {
"sample_size": 32,
"in_channels": 3,
"out_channels": 3,
"layers_per_block": 2,
"num_class_embeds": 1000,
"block_out_channels": [32, 64],
"attention_head_dim": 8,
"down_block_types": [
"ResnetDownsampleBlock2D",
"AttnDownBlock2D",
],
"up_block_types": [
"AttnUpBlock2D",
"ResnetUpsampleBlock2D",
],
"resnet_time_scale_shift": "scale_shift",
"upsample_type": "resnet",
"downsample_type": "resnet",
}
IMAGENET_64_UNET_CONFIG = {
"sample_size": 64,
"in_channels": 3,
"out_channels": 3,
"layers_per_block": 3,
"num_class_embeds": 1000,
"block_out_channels": [192, 192 * 2, 192 * 3, 192 * 4],
"attention_head_dim": 64,
"down_block_types": [
"ResnetDownsampleBlock2D",
"AttnDownBlock2D",
"AttnDownBlock2D",
"AttnDownBlock2D",
],
"up_block_types": [
"AttnUpBlock2D",
"AttnUpBlock2D",
"AttnUpBlock2D",
"ResnetUpsampleBlock2D",
],
"resnet_time_scale_shift": "scale_shift",
"upsample_type": "resnet",
"downsample_type": "resnet",
}
LSUN_256_UNET_CONFIG = {
"sample_size": 256,
"in_channels": 3,
"out_channels": 3,
"layers_per_block": 2,
"num_class_embeds": None,
"block_out_channels": [256, 256, 256 * 2, 256 * 2, 256 * 4, 256 * 4],
"attention_head_dim": 64,
"down_block_types": [
"ResnetDownsampleBlock2D",
"ResnetDownsampleBlock2D",
"ResnetDownsampleBlock2D",
"AttnDownBlock2D",
"AttnDownBlock2D",
"AttnDownBlock2D",
],
"up_block_types": [
"AttnUpBlock2D",
"AttnUpBlock2D",
"AttnUpBlock2D",
"ResnetUpsampleBlock2D",
"ResnetUpsampleBlock2D",
"ResnetUpsampleBlock2D",
],
"resnet_time_scale_shift": "default",
"upsample_type": "resnet",
"downsample_type": "resnet",
}
CD_SCHEDULER_CONFIG = {
"num_train_timesteps": 40,
"sigma_min": 0.002,
"sigma_max": 80.0,
}
CT_IMAGENET_64_SCHEDULER_CONFIG = {
"num_train_timesteps": 201,
"sigma_min": 0.002,
"sigma_max": 80.0,
}
CT_LSUN_256_SCHEDULER_CONFIG = {
"num_train_timesteps": 151,
"sigma_min": 0.002,
"sigma_max": 80.0,
}
def str2bool(v):
"""
https://stackoverflow.com/questions/15008758/parsing-boolean-values-with-argparse
"""
if isinstance(v, bool):
return v
if v.lower() in ("yes", "true", "t", "y", "1"):
return True
elif v.lower() in ("no", "false", "f", "n", "0"):
return False
else:
raise argparse.ArgumentTypeError("boolean value expected")
def convert_resnet(checkpoint, new_checkpoint, old_prefix, new_prefix, has_skip=False):
new_checkpoint[f"{new_prefix}.norm1.weight"] = checkpoint[f"{old_prefix}.in_layers.0.weight"]
new_checkpoint[f"{new_prefix}.norm1.bias"] = checkpoint[f"{old_prefix}.in_layers.0.bias"]
new_checkpoint[f"{new_prefix}.conv1.weight"] = checkpoint[f"{old_prefix}.in_layers.2.weight"]
new_checkpoint[f"{new_prefix}.conv1.bias"] = checkpoint[f"{old_prefix}.in_layers.2.bias"]
new_checkpoint[f"{new_prefix}.time_emb_proj.weight"] = checkpoint[f"{old_prefix}.emb_layers.1.weight"]
new_checkpoint[f"{new_prefix}.time_emb_proj.bias"] = checkpoint[f"{old_prefix}.emb_layers.1.bias"]
new_checkpoint[f"{new_prefix}.norm2.weight"] = checkpoint[f"{old_prefix}.out_layers.0.weight"]
new_checkpoint[f"{new_prefix}.norm2.bias"] = checkpoint[f"{old_prefix}.out_layers.0.bias"]
new_checkpoint[f"{new_prefix}.conv2.weight"] = checkpoint[f"{old_prefix}.out_layers.3.weight"]
new_checkpoint[f"{new_prefix}.conv2.bias"] = checkpoint[f"{old_prefix}.out_layers.3.bias"]
if has_skip:
new_checkpoint[f"{new_prefix}.conv_shortcut.weight"] = checkpoint[f"{old_prefix}.skip_connection.weight"]
new_checkpoint[f"{new_prefix}.conv_shortcut.bias"] = checkpoint[f"{old_prefix}.skip_connection.bias"]
return new_checkpoint
def convert_attention(checkpoint, new_checkpoint, old_prefix, new_prefix, attention_dim=None):
weight_q, weight_k, weight_v = checkpoint[f"{old_prefix}.qkv.weight"].chunk(3, dim=0)
bias_q, bias_k, bias_v = checkpoint[f"{old_prefix}.qkv.bias"].chunk(3, dim=0)
new_checkpoint[f"{new_prefix}.group_norm.weight"] = checkpoint[f"{old_prefix}.norm.weight"]
new_checkpoint[f"{new_prefix}.group_norm.bias"] = checkpoint[f"{old_prefix}.norm.bias"]
new_checkpoint[f"{new_prefix}.to_q.weight"] = weight_q.squeeze(-1).squeeze(-1)
new_checkpoint[f"{new_prefix}.to_q.bias"] = bias_q.squeeze(-1).squeeze(-1)
new_checkpoint[f"{new_prefix}.to_k.weight"] = weight_k.squeeze(-1).squeeze(-1)
new_checkpoint[f"{new_prefix}.to_k.bias"] = bias_k.squeeze(-1).squeeze(-1)
new_checkpoint[f"{new_prefix}.to_v.weight"] = weight_v.squeeze(-1).squeeze(-1)
new_checkpoint[f"{new_prefix}.to_v.bias"] = bias_v.squeeze(-1).squeeze(-1)
new_checkpoint[f"{new_prefix}.to_out.0.weight"] = (
checkpoint[f"{old_prefix}.proj_out.weight"].squeeze(-1).squeeze(-1)
)
new_checkpoint[f"{new_prefix}.to_out.0.bias"] = checkpoint[f"{old_prefix}.proj_out.bias"].squeeze(-1).squeeze(-1)
return new_checkpoint
def con_pt_to_diffuser(checkpoint_path: str, unet_config):
checkpoint = torch.load(checkpoint_path, map_location="cpu")
new_checkpoint = {}
new_checkpoint["time_embedding.linear_1.weight"] = checkpoint["time_embed.0.weight"]
new_checkpoint["time_embedding.linear_1.bias"] = checkpoint["time_embed.0.bias"]
new_checkpoint["time_embedding.linear_2.weight"] = checkpoint["time_embed.2.weight"]
new_checkpoint["time_embedding.linear_2.bias"] = checkpoint["time_embed.2.bias"]
if unet_config["num_class_embeds"] is not None:
new_checkpoint["class_embedding.weight"] = checkpoint["label_emb.weight"]
new_checkpoint["conv_in.weight"] = checkpoint["input_blocks.0.0.weight"]
new_checkpoint["conv_in.bias"] = checkpoint["input_blocks.0.0.bias"]
down_block_types = unet_config["down_block_types"]
layers_per_block = unet_config["layers_per_block"]
attention_head_dim = unet_config["attention_head_dim"]
channels_list = unet_config["block_out_channels"]
current_layer = 1
prev_channels = channels_list[0]
for i, layer_type in enumerate(down_block_types):
current_channels = channels_list[i]
downsample_block_has_skip = current_channels != prev_channels
if layer_type == "ResnetDownsampleBlock2D":
for j in range(layers_per_block):
new_prefix = f"down_blocks.{i}.resnets.{j}"
old_prefix = f"input_blocks.{current_layer}.0"
has_skip = True if j == 0 and downsample_block_has_skip else False
new_checkpoint = convert_resnet(checkpoint, new_checkpoint, old_prefix, new_prefix, has_skip=has_skip)
current_layer += 1
elif layer_type == "AttnDownBlock2D":
for j in range(layers_per_block):
new_prefix = f"down_blocks.{i}.resnets.{j}"
old_prefix = f"input_blocks.{current_layer}.0"
has_skip = True if j == 0 and downsample_block_has_skip else False
new_checkpoint = convert_resnet(checkpoint, new_checkpoint, old_prefix, new_prefix, has_skip=has_skip)
new_prefix = f"down_blocks.{i}.attentions.{j}"
old_prefix = f"input_blocks.{current_layer}.1"
new_checkpoint = convert_attention(
checkpoint, new_checkpoint, old_prefix, new_prefix, attention_head_dim
)
current_layer += 1
if i != len(down_block_types) - 1:
new_prefix = f"down_blocks.{i}.downsamplers.0"
old_prefix = f"input_blocks.{current_layer}.0"
new_checkpoint = convert_resnet(checkpoint, new_checkpoint, old_prefix, new_prefix)
current_layer += 1
prev_channels = current_channels
# hardcoded the mid-block for now
new_prefix = "mid_block.resnets.0"
old_prefix = "middle_block.0"
new_checkpoint = convert_resnet(checkpoint, new_checkpoint, old_prefix, new_prefix)
new_prefix = "mid_block.attentions.0"
old_prefix = "middle_block.1"
new_checkpoint = convert_attention(checkpoint, new_checkpoint, old_prefix, new_prefix, attention_head_dim)
new_prefix = "mid_block.resnets.1"
old_prefix = "middle_block.2"
new_checkpoint = convert_resnet(checkpoint, new_checkpoint, old_prefix, new_prefix)
current_layer = 0
up_block_types = unet_config["up_block_types"]
for i, layer_type in enumerate(up_block_types):
if layer_type == "ResnetUpsampleBlock2D":
for j in range(layers_per_block + 1):
new_prefix = f"up_blocks.{i}.resnets.{j}"
old_prefix = f"output_blocks.{current_layer}.0"
new_checkpoint = convert_resnet(checkpoint, new_checkpoint, old_prefix, new_prefix, has_skip=True)
current_layer += 1
if i != len(up_block_types) - 1:
new_prefix = f"up_blocks.{i}.upsamplers.0"
old_prefix = f"output_blocks.{current_layer-1}.1"
new_checkpoint = convert_resnet(checkpoint, new_checkpoint, old_prefix, new_prefix)
elif layer_type == "AttnUpBlock2D":
for j in range(layers_per_block + 1):
new_prefix = f"up_blocks.{i}.resnets.{j}"
old_prefix = f"output_blocks.{current_layer}.0"
new_checkpoint = convert_resnet(checkpoint, new_checkpoint, old_prefix, new_prefix, has_skip=True)
new_prefix = f"up_blocks.{i}.attentions.{j}"
old_prefix = f"output_blocks.{current_layer}.1"
new_checkpoint = convert_attention(
checkpoint, new_checkpoint, old_prefix, new_prefix, attention_head_dim
)
current_layer += 1
if i != len(up_block_types) - 1:
new_prefix = f"up_blocks.{i}.upsamplers.0"
old_prefix = f"output_blocks.{current_layer-1}.2"
new_checkpoint = convert_resnet(checkpoint, new_checkpoint, old_prefix, new_prefix)
new_checkpoint["conv_norm_out.weight"] = checkpoint["out.0.weight"]
new_checkpoint["conv_norm_out.bias"] = checkpoint["out.0.bias"]
new_checkpoint["conv_out.weight"] = checkpoint["out.2.weight"]
new_checkpoint["conv_out.bias"] = checkpoint["out.2.bias"]
return new_checkpoint
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument("--unet_path", default=None, type=str, required=True, help="Path to the unet.pt to convert.")
parser.add_argument(
"--dump_path", default=None, type=str, required=True, help="Path to output the converted UNet model."
)
parser.add_argument("--class_cond", default=True, type=str, help="Whether the model is class-conditional.")
args = parser.parse_args()
args.class_cond = str2bool(args.class_cond)
ckpt_name = os.path.basename(args.unet_path)
print(f"Checkpoint: {ckpt_name}")
# Get U-Net config
if "imagenet64" in ckpt_name:
unet_config = IMAGENET_64_UNET_CONFIG
elif "256" in ckpt_name and (("bedroom" in ckpt_name) or ("cat" in ckpt_name)):
unet_config = LSUN_256_UNET_CONFIG
elif "test" in ckpt_name:
unet_config = TEST_UNET_CONFIG
else:
raise ValueError(f"Checkpoint type {ckpt_name} is not currently supported.")
if not args.class_cond:
unet_config["num_class_embeds"] = None
converted_unet_ckpt = con_pt_to_diffuser(args.unet_path, unet_config)
image_unet = UNet2DModel(**unet_config)
image_unet.load_state_dict(converted_unet_ckpt)
# Get scheduler config
if "cd" in ckpt_name or "test" in ckpt_name:
scheduler_config = CD_SCHEDULER_CONFIG
elif "ct" in ckpt_name and "imagenet64" in ckpt_name:
scheduler_config = CT_IMAGENET_64_SCHEDULER_CONFIG
elif "ct" in ckpt_name and "256" in ckpt_name and (("bedroom" in ckpt_name) or ("cat" in ckpt_name)):
scheduler_config = CT_LSUN_256_SCHEDULER_CONFIG
else:
raise ValueError(f"Checkpoint type {ckpt_name} is not currently supported.")
cm_scheduler = CMStochasticIterativeScheduler(**scheduler_config)
consistency_model = ConsistencyModelPipeline(unet=image_unet, scheduler=cm_scheduler)
consistency_model.save_pretrained(args.dump_path)
| 0 |
hf_public_repos/diffusers | hf_public_repos/diffusers/scripts/convert_ldm_original_checkpoint_to_diffusers.py | # coding=utf-8
# Copyright 2023 The HuggingFace Inc. team.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
""" Conversion script for the LDM checkpoints. """
import argparse
import json
import torch
from diffusers import DDPMScheduler, LDMPipeline, UNet2DModel, VQModel
def shave_segments(path, n_shave_prefix_segments=1):
"""
Removes segments. Positive values shave the first segments, negative shave the last segments.
"""
if n_shave_prefix_segments >= 0:
return ".".join(path.split(".")[n_shave_prefix_segments:])
else:
return ".".join(path.split(".")[:n_shave_prefix_segments])
def renew_resnet_paths(old_list, n_shave_prefix_segments=0):
"""
Updates paths inside resnets to the new naming scheme (local renaming)
"""
mapping = []
for old_item in old_list:
new_item = old_item.replace("in_layers.0", "norm1")
new_item = new_item.replace("in_layers.2", "conv1")
new_item = new_item.replace("out_layers.0", "norm2")
new_item = new_item.replace("out_layers.3", "conv2")
new_item = new_item.replace("emb_layers.1", "time_emb_proj")
new_item = new_item.replace("skip_connection", "conv_shortcut")
new_item = shave_segments(new_item, n_shave_prefix_segments=n_shave_prefix_segments)
mapping.append({"old": old_item, "new": new_item})
return mapping
def renew_attention_paths(old_list, n_shave_prefix_segments=0):
"""
Updates paths inside attentions to the new naming scheme (local renaming)
"""
mapping = []
for old_item in old_list:
new_item = old_item
new_item = new_item.replace("norm.weight", "group_norm.weight")
new_item = new_item.replace("norm.bias", "group_norm.bias")
new_item = new_item.replace("proj_out.weight", "proj_attn.weight")
new_item = new_item.replace("proj_out.bias", "proj_attn.bias")
new_item = shave_segments(new_item, n_shave_prefix_segments=n_shave_prefix_segments)
mapping.append({"old": old_item, "new": new_item})
return mapping
def assign_to_checkpoint(
paths, checkpoint, old_checkpoint, attention_paths_to_split=None, additional_replacements=None, config=None
):
"""
This does the final conversion step: take locally converted weights and apply a global renaming
to them. It splits attention layers, and takes into account additional replacements
that may arise.
Assigns the weights to the new checkpoint.
"""
assert isinstance(paths, list), "Paths should be a list of dicts containing 'old' and 'new' keys."
# Splits the attention layers into three variables.
if attention_paths_to_split is not None:
for path, path_map in attention_paths_to_split.items():
old_tensor = old_checkpoint[path]
channels = old_tensor.shape[0] // 3
target_shape = (-1, channels) if len(old_tensor.shape) == 3 else (-1)
num_heads = old_tensor.shape[0] // config["num_head_channels"] // 3
old_tensor = old_tensor.reshape((num_heads, 3 * channels // num_heads) + old_tensor.shape[1:])
query, key, value = old_tensor.split(channels // num_heads, dim=1)
checkpoint[path_map["query"]] = query.reshape(target_shape)
checkpoint[path_map["key"]] = key.reshape(target_shape)
checkpoint[path_map["value"]] = value.reshape(target_shape)
for path in paths:
new_path = path["new"]
# These have already been assigned
if attention_paths_to_split is not None and new_path in attention_paths_to_split:
continue
# Global renaming happens here
new_path = new_path.replace("middle_block.0", "mid_block.resnets.0")
new_path = new_path.replace("middle_block.1", "mid_block.attentions.0")
new_path = new_path.replace("middle_block.2", "mid_block.resnets.1")
if additional_replacements is not None:
for replacement in additional_replacements:
new_path = new_path.replace(replacement["old"], replacement["new"])
# proj_attn.weight has to be converted from conv 1D to linear
if "proj_attn.weight" in new_path:
checkpoint[new_path] = old_checkpoint[path["old"]][:, :, 0]
else:
checkpoint[new_path] = old_checkpoint[path["old"]]
def convert_ldm_checkpoint(checkpoint, config):
"""
Takes a state dict and a config, and returns a converted checkpoint.
"""
new_checkpoint = {}
new_checkpoint["time_embedding.linear_1.weight"] = checkpoint["time_embed.0.weight"]
new_checkpoint["time_embedding.linear_1.bias"] = checkpoint["time_embed.0.bias"]
new_checkpoint["time_embedding.linear_2.weight"] = checkpoint["time_embed.2.weight"]
new_checkpoint["time_embedding.linear_2.bias"] = checkpoint["time_embed.2.bias"]
new_checkpoint["conv_in.weight"] = checkpoint["input_blocks.0.0.weight"]
new_checkpoint["conv_in.bias"] = checkpoint["input_blocks.0.0.bias"]
new_checkpoint["conv_norm_out.weight"] = checkpoint["out.0.weight"]
new_checkpoint["conv_norm_out.bias"] = checkpoint["out.0.bias"]
new_checkpoint["conv_out.weight"] = checkpoint["out.2.weight"]
new_checkpoint["conv_out.bias"] = checkpoint["out.2.bias"]
# Retrieves the keys for the input blocks only
num_input_blocks = len({".".join(layer.split(".")[:2]) for layer in checkpoint if "input_blocks" in layer})
input_blocks = {
layer_id: [key for key in checkpoint if f"input_blocks.{layer_id}" in key]
for layer_id in range(num_input_blocks)
}
# Retrieves the keys for the middle blocks only
num_middle_blocks = len({".".join(layer.split(".")[:2]) for layer in checkpoint if "middle_block" in layer})
middle_blocks = {
layer_id: [key for key in checkpoint if f"middle_block.{layer_id}" in key]
for layer_id in range(num_middle_blocks)
}
# Retrieves the keys for the output blocks only
num_output_blocks = len({".".join(layer.split(".")[:2]) for layer in checkpoint if "output_blocks" in layer})
output_blocks = {
layer_id: [key for key in checkpoint if f"output_blocks.{layer_id}" in key]
for layer_id in range(num_output_blocks)
}
for i in range(1, num_input_blocks):
block_id = (i - 1) // (config["num_res_blocks"] + 1)
layer_in_block_id = (i - 1) % (config["num_res_blocks"] + 1)
resnets = [key for key in input_blocks[i] if f"input_blocks.{i}.0" in key]
attentions = [key for key in input_blocks[i] if f"input_blocks.{i}.1" in key]
if f"input_blocks.{i}.0.op.weight" in checkpoint:
new_checkpoint[f"down_blocks.{block_id}.downsamplers.0.conv.weight"] = checkpoint[
f"input_blocks.{i}.0.op.weight"
]
new_checkpoint[f"down_blocks.{block_id}.downsamplers.0.conv.bias"] = checkpoint[
f"input_blocks.{i}.0.op.bias"
]
continue
paths = renew_resnet_paths(resnets)
meta_path = {"old": f"input_blocks.{i}.0", "new": f"down_blocks.{block_id}.resnets.{layer_in_block_id}"}
resnet_op = {"old": "resnets.2.op", "new": "downsamplers.0.op"}
assign_to_checkpoint(
paths, new_checkpoint, checkpoint, additional_replacements=[meta_path, resnet_op], config=config
)
if len(attentions):
paths = renew_attention_paths(attentions)
meta_path = {
"old": f"input_blocks.{i}.1",
"new": f"down_blocks.{block_id}.attentions.{layer_in_block_id}",
}
to_split = {
f"input_blocks.{i}.1.qkv.bias": {
"key": f"down_blocks.{block_id}.attentions.{layer_in_block_id}.key.bias",
"query": f"down_blocks.{block_id}.attentions.{layer_in_block_id}.query.bias",
"value": f"down_blocks.{block_id}.attentions.{layer_in_block_id}.value.bias",
},
f"input_blocks.{i}.1.qkv.weight": {
"key": f"down_blocks.{block_id}.attentions.{layer_in_block_id}.key.weight",
"query": f"down_blocks.{block_id}.attentions.{layer_in_block_id}.query.weight",
"value": f"down_blocks.{block_id}.attentions.{layer_in_block_id}.value.weight",
},
}
assign_to_checkpoint(
paths,
new_checkpoint,
checkpoint,
additional_replacements=[meta_path],
attention_paths_to_split=to_split,
config=config,
)
resnet_0 = middle_blocks[0]
attentions = middle_blocks[1]
resnet_1 = middle_blocks[2]
resnet_0_paths = renew_resnet_paths(resnet_0)
assign_to_checkpoint(resnet_0_paths, new_checkpoint, checkpoint, config=config)
resnet_1_paths = renew_resnet_paths(resnet_1)
assign_to_checkpoint(resnet_1_paths, new_checkpoint, checkpoint, config=config)
attentions_paths = renew_attention_paths(attentions)
to_split = {
"middle_block.1.qkv.bias": {
"key": "mid_block.attentions.0.key.bias",
"query": "mid_block.attentions.0.query.bias",
"value": "mid_block.attentions.0.value.bias",
},
"middle_block.1.qkv.weight": {
"key": "mid_block.attentions.0.key.weight",
"query": "mid_block.attentions.0.query.weight",
"value": "mid_block.attentions.0.value.weight",
},
}
assign_to_checkpoint(
attentions_paths, new_checkpoint, checkpoint, attention_paths_to_split=to_split, config=config
)
for i in range(num_output_blocks):
block_id = i // (config["num_res_blocks"] + 1)
layer_in_block_id = i % (config["num_res_blocks"] + 1)
output_block_layers = [shave_segments(name, 2) for name in output_blocks[i]]
output_block_list = {}
for layer in output_block_layers:
layer_id, layer_name = layer.split(".")[0], shave_segments(layer, 1)
if layer_id in output_block_list:
output_block_list[layer_id].append(layer_name)
else:
output_block_list[layer_id] = [layer_name]
if len(output_block_list) > 1:
resnets = [key for key in output_blocks[i] if f"output_blocks.{i}.0" in key]
attentions = [key for key in output_blocks[i] if f"output_blocks.{i}.1" in key]
resnet_0_paths = renew_resnet_paths(resnets)
paths = renew_resnet_paths(resnets)
meta_path = {"old": f"output_blocks.{i}.0", "new": f"up_blocks.{block_id}.resnets.{layer_in_block_id}"}
assign_to_checkpoint(paths, new_checkpoint, checkpoint, additional_replacements=[meta_path], config=config)
if ["conv.weight", "conv.bias"] in output_block_list.values():
index = list(output_block_list.values()).index(["conv.weight", "conv.bias"])
new_checkpoint[f"up_blocks.{block_id}.upsamplers.0.conv.weight"] = checkpoint[
f"output_blocks.{i}.{index}.conv.weight"
]
new_checkpoint[f"up_blocks.{block_id}.upsamplers.0.conv.bias"] = checkpoint[
f"output_blocks.{i}.{index}.conv.bias"
]
# Clear attentions as they have been attributed above.
if len(attentions) == 2:
attentions = []
if len(attentions):
paths = renew_attention_paths(attentions)
meta_path = {
"old": f"output_blocks.{i}.1",
"new": f"up_blocks.{block_id}.attentions.{layer_in_block_id}",
}
to_split = {
f"output_blocks.{i}.1.qkv.bias": {
"key": f"up_blocks.{block_id}.attentions.{layer_in_block_id}.key.bias",
"query": f"up_blocks.{block_id}.attentions.{layer_in_block_id}.query.bias",
"value": f"up_blocks.{block_id}.attentions.{layer_in_block_id}.value.bias",
},
f"output_blocks.{i}.1.qkv.weight": {
"key": f"up_blocks.{block_id}.attentions.{layer_in_block_id}.key.weight",
"query": f"up_blocks.{block_id}.attentions.{layer_in_block_id}.query.weight",
"value": f"up_blocks.{block_id}.attentions.{layer_in_block_id}.value.weight",
},
}
assign_to_checkpoint(
paths,
new_checkpoint,
checkpoint,
additional_replacements=[meta_path],
attention_paths_to_split=to_split if any("qkv" in key for key in attentions) else None,
config=config,
)
else:
resnet_0_paths = renew_resnet_paths(output_block_layers, n_shave_prefix_segments=1)
for path in resnet_0_paths:
old_path = ".".join(["output_blocks", str(i), path["old"]])
new_path = ".".join(["up_blocks", str(block_id), "resnets", str(layer_in_block_id), path["new"]])
new_checkpoint[new_path] = checkpoint[old_path]
return new_checkpoint
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument(
"--checkpoint_path", default=None, type=str, required=True, help="Path to the checkpoint to convert."
)
parser.add_argument(
"--config_file",
default=None,
type=str,
required=True,
help="The config json file corresponding to the architecture.",
)
parser.add_argument("--dump_path", default=None, type=str, required=True, help="Path to the output model.")
args = parser.parse_args()
checkpoint = torch.load(args.checkpoint_path)
with open(args.config_file) as f:
config = json.loads(f.read())
converted_checkpoint = convert_ldm_checkpoint(checkpoint, config)
if "ldm" in config:
del config["ldm"]
model = UNet2DModel(**config)
model.load_state_dict(converted_checkpoint)
try:
scheduler = DDPMScheduler.from_config("/".join(args.checkpoint_path.split("/")[:-1]))
vqvae = VQModel.from_pretrained("/".join(args.checkpoint_path.split("/")[:-1]))
pipe = LDMPipeline(unet=model, scheduler=scheduler, vae=vqvae)
pipe.save_pretrained(args.dump_path)
except: # noqa: E722
model.save_pretrained(args.dump_path)
| 0 |
hf_public_repos/diffusers | hf_public_repos/diffusers/scripts/convert_dit_to_diffusers.py | import argparse
import os
import torch
from torchvision.datasets.utils import download_url
from diffusers import AutoencoderKL, DDIMScheduler, DiTPipeline, Transformer2DModel
pretrained_models = {512: "DiT-XL-2-512x512.pt", 256: "DiT-XL-2-256x256.pt"}
def download_model(model_name):
"""
Downloads a pre-trained DiT model from the web.
"""
local_path = f"pretrained_models/{model_name}"
if not os.path.isfile(local_path):
os.makedirs("pretrained_models", exist_ok=True)
web_path = f"https://dl.fbaipublicfiles.com/DiT/models/{model_name}"
download_url(web_path, "pretrained_models")
model = torch.load(local_path, map_location=lambda storage, loc: storage)
return model
def main(args):
state_dict = download_model(pretrained_models[args.image_size])
state_dict["pos_embed.proj.weight"] = state_dict["x_embedder.proj.weight"]
state_dict["pos_embed.proj.bias"] = state_dict["x_embedder.proj.bias"]
state_dict.pop("x_embedder.proj.weight")
state_dict.pop("x_embedder.proj.bias")
for depth in range(28):
state_dict[f"transformer_blocks.{depth}.norm1.emb.timestep_embedder.linear_1.weight"] = state_dict[
"t_embedder.mlp.0.weight"
]
state_dict[f"transformer_blocks.{depth}.norm1.emb.timestep_embedder.linear_1.bias"] = state_dict[
"t_embedder.mlp.0.bias"
]
state_dict[f"transformer_blocks.{depth}.norm1.emb.timestep_embedder.linear_2.weight"] = state_dict[
"t_embedder.mlp.2.weight"
]
state_dict[f"transformer_blocks.{depth}.norm1.emb.timestep_embedder.linear_2.bias"] = state_dict[
"t_embedder.mlp.2.bias"
]
state_dict[f"transformer_blocks.{depth}.norm1.emb.class_embedder.embedding_table.weight"] = state_dict[
"y_embedder.embedding_table.weight"
]
state_dict[f"transformer_blocks.{depth}.norm1.linear.weight"] = state_dict[
f"blocks.{depth}.adaLN_modulation.1.weight"
]
state_dict[f"transformer_blocks.{depth}.norm1.linear.bias"] = state_dict[
f"blocks.{depth}.adaLN_modulation.1.bias"
]
q, k, v = torch.chunk(state_dict[f"blocks.{depth}.attn.qkv.weight"], 3, dim=0)
q_bias, k_bias, v_bias = torch.chunk(state_dict[f"blocks.{depth}.attn.qkv.bias"], 3, dim=0)
state_dict[f"transformer_blocks.{depth}.attn1.to_q.weight"] = q
state_dict[f"transformer_blocks.{depth}.attn1.to_q.bias"] = q_bias
state_dict[f"transformer_blocks.{depth}.attn1.to_k.weight"] = k
state_dict[f"transformer_blocks.{depth}.attn1.to_k.bias"] = k_bias
state_dict[f"transformer_blocks.{depth}.attn1.to_v.weight"] = v
state_dict[f"transformer_blocks.{depth}.attn1.to_v.bias"] = v_bias
state_dict[f"transformer_blocks.{depth}.attn1.to_out.0.weight"] = state_dict[
f"blocks.{depth}.attn.proj.weight"
]
state_dict[f"transformer_blocks.{depth}.attn1.to_out.0.bias"] = state_dict[f"blocks.{depth}.attn.proj.bias"]
state_dict[f"transformer_blocks.{depth}.ff.net.0.proj.weight"] = state_dict[f"blocks.{depth}.mlp.fc1.weight"]
state_dict[f"transformer_blocks.{depth}.ff.net.0.proj.bias"] = state_dict[f"blocks.{depth}.mlp.fc1.bias"]
state_dict[f"transformer_blocks.{depth}.ff.net.2.weight"] = state_dict[f"blocks.{depth}.mlp.fc2.weight"]
state_dict[f"transformer_blocks.{depth}.ff.net.2.bias"] = state_dict[f"blocks.{depth}.mlp.fc2.bias"]
state_dict.pop(f"blocks.{depth}.attn.qkv.weight")
state_dict.pop(f"blocks.{depth}.attn.qkv.bias")
state_dict.pop(f"blocks.{depth}.attn.proj.weight")
state_dict.pop(f"blocks.{depth}.attn.proj.bias")
state_dict.pop(f"blocks.{depth}.mlp.fc1.weight")
state_dict.pop(f"blocks.{depth}.mlp.fc1.bias")
state_dict.pop(f"blocks.{depth}.mlp.fc2.weight")
state_dict.pop(f"blocks.{depth}.mlp.fc2.bias")
state_dict.pop(f"blocks.{depth}.adaLN_modulation.1.weight")
state_dict.pop(f"blocks.{depth}.adaLN_modulation.1.bias")
state_dict.pop("t_embedder.mlp.0.weight")
state_dict.pop("t_embedder.mlp.0.bias")
state_dict.pop("t_embedder.mlp.2.weight")
state_dict.pop("t_embedder.mlp.2.bias")
state_dict.pop("y_embedder.embedding_table.weight")
state_dict["proj_out_1.weight"] = state_dict["final_layer.adaLN_modulation.1.weight"]
state_dict["proj_out_1.bias"] = state_dict["final_layer.adaLN_modulation.1.bias"]
state_dict["proj_out_2.weight"] = state_dict["final_layer.linear.weight"]
state_dict["proj_out_2.bias"] = state_dict["final_layer.linear.bias"]
state_dict.pop("final_layer.linear.weight")
state_dict.pop("final_layer.linear.bias")
state_dict.pop("final_layer.adaLN_modulation.1.weight")
state_dict.pop("final_layer.adaLN_modulation.1.bias")
# DiT XL/2
transformer = Transformer2DModel(
sample_size=args.image_size // 8,
num_layers=28,
attention_head_dim=72,
in_channels=4,
out_channels=8,
patch_size=2,
attention_bias=True,
num_attention_heads=16,
activation_fn="gelu-approximate",
num_embeds_ada_norm=1000,
norm_type="ada_norm_zero",
norm_elementwise_affine=False,
)
transformer.load_state_dict(state_dict, strict=True)
scheduler = DDIMScheduler(
num_train_timesteps=1000,
beta_schedule="linear",
prediction_type="epsilon",
clip_sample=False,
)
vae = AutoencoderKL.from_pretrained(args.vae_model)
pipeline = DiTPipeline(transformer=transformer, vae=vae, scheduler=scheduler)
if args.save:
pipeline.save_pretrained(args.checkpoint_path)
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument(
"--image_size",
default=256,
type=int,
required=False,
help="Image size of pretrained model, either 256 or 512.",
)
parser.add_argument(
"--vae_model",
default="stabilityai/sd-vae-ft-ema",
type=str,
required=False,
help="Path to pretrained VAE model, either stabilityai/sd-vae-ft-mse or stabilityai/sd-vae-ft-ema.",
)
parser.add_argument(
"--save", default=True, type=bool, required=False, help="Whether to save the converted pipeline or not."
)
parser.add_argument(
"--checkpoint_path", default=None, type=str, required=True, help="Path to the output pipeline."
)
args = parser.parse_args()
main(args)
| 0 |
hf_public_repos/diffusers | hf_public_repos/diffusers/scripts/convert_models_diffuser_to_diffusers.py | import json
import os
import torch
from diffusers import UNet1DModel
os.makedirs("hub/hopper-medium-v2/unet/hor32", exist_ok=True)
os.makedirs("hub/hopper-medium-v2/unet/hor128", exist_ok=True)
os.makedirs("hub/hopper-medium-v2/value_function", exist_ok=True)
def unet(hor):
if hor == 128:
down_block_types = ("DownResnetBlock1D", "DownResnetBlock1D", "DownResnetBlock1D")
block_out_channels = (32, 128, 256)
up_block_types = ("UpResnetBlock1D", "UpResnetBlock1D")
elif hor == 32:
down_block_types = ("DownResnetBlock1D", "DownResnetBlock1D", "DownResnetBlock1D", "DownResnetBlock1D")
block_out_channels = (32, 64, 128, 256)
up_block_types = ("UpResnetBlock1D", "UpResnetBlock1D", "UpResnetBlock1D")
model = torch.load(f"/Users/bglickenhaus/Documents/diffuser/temporal_unet-hopper-mediumv2-hor{hor}.torch")
state_dict = model.state_dict()
config = {
"down_block_types": down_block_types,
"block_out_channels": block_out_channels,
"up_block_types": up_block_types,
"layers_per_block": 1,
"use_timestep_embedding": True,
"out_block_type": "OutConv1DBlock",
"norm_num_groups": 8,
"downsample_each_block": False,
"in_channels": 14,
"out_channels": 14,
"extra_in_channels": 0,
"time_embedding_type": "positional",
"flip_sin_to_cos": False,
"freq_shift": 1,
"sample_size": 65536,
"mid_block_type": "MidResTemporalBlock1D",
"act_fn": "mish",
}
hf_value_function = UNet1DModel(**config)
print(f"length of state dict: {len(state_dict.keys())}")
print(f"length of value function dict: {len(hf_value_function.state_dict().keys())}")
mapping = dict(zip(model.state_dict().keys(), hf_value_function.state_dict().keys()))
for k, v in mapping.items():
state_dict[v] = state_dict.pop(k)
hf_value_function.load_state_dict(state_dict)
torch.save(hf_value_function.state_dict(), f"hub/hopper-medium-v2/unet/hor{hor}/diffusion_pytorch_model.bin")
with open(f"hub/hopper-medium-v2/unet/hor{hor}/config.json", "w") as f:
json.dump(config, f)
def value_function():
config = {
"in_channels": 14,
"down_block_types": ("DownResnetBlock1D", "DownResnetBlock1D", "DownResnetBlock1D", "DownResnetBlock1D"),
"up_block_types": (),
"out_block_type": "ValueFunction",
"mid_block_type": "ValueFunctionMidBlock1D",
"block_out_channels": (32, 64, 128, 256),
"layers_per_block": 1,
"downsample_each_block": True,
"sample_size": 65536,
"out_channels": 14,
"extra_in_channels": 0,
"time_embedding_type": "positional",
"use_timestep_embedding": True,
"flip_sin_to_cos": False,
"freq_shift": 1,
"norm_num_groups": 8,
"act_fn": "mish",
}
model = torch.load("/Users/bglickenhaus/Documents/diffuser/value_function-hopper-mediumv2-hor32.torch")
state_dict = model
hf_value_function = UNet1DModel(**config)
print(f"length of state dict: {len(state_dict.keys())}")
print(f"length of value function dict: {len(hf_value_function.state_dict().keys())}")
mapping = dict(zip(state_dict.keys(), hf_value_function.state_dict().keys()))
for k, v in mapping.items():
state_dict[v] = state_dict.pop(k)
hf_value_function.load_state_dict(state_dict)
torch.save(hf_value_function.state_dict(), "hub/hopper-medium-v2/value_function/diffusion_pytorch_model.bin")
with open("hub/hopper-medium-v2/value_function/config.json", "w") as f:
json.dump(config, f)
if __name__ == "__main__":
unet(32)
# unet(128)
value_function()
| 0 |
hf_public_repos/diffusers | hf_public_repos/diffusers/scripts/convert_original_t2i_adapter.py | # coding=utf-8
# Copyright 2023 The HuggingFace Inc. team.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
"""
Conversion script for the T2I-Adapter checkpoints.
"""
import argparse
import torch
from diffusers import T2IAdapter
def convert_adapter(src_state, in_channels):
original_body_length = max([int(x.split(".")[1]) for x in src_state.keys() if "body." in x]) + 1
assert original_body_length == 8
# (0, 1) -> channels 1
assert src_state["body.0.block1.weight"].shape == (320, 320, 3, 3)
# (2, 3) -> channels 2
assert src_state["body.2.in_conv.weight"].shape == (640, 320, 1, 1)
# (4, 5) -> channels 3
assert src_state["body.4.in_conv.weight"].shape == (1280, 640, 1, 1)
# (6, 7) -> channels 4
assert src_state["body.6.block1.weight"].shape == (1280, 1280, 3, 3)
res_state = {
"adapter.conv_in.weight": src_state.pop("conv_in.weight"),
"adapter.conv_in.bias": src_state.pop("conv_in.bias"),
# 0.resnets.0
"adapter.body.0.resnets.0.block1.weight": src_state.pop("body.0.block1.weight"),
"adapter.body.0.resnets.0.block1.bias": src_state.pop("body.0.block1.bias"),
"adapter.body.0.resnets.0.block2.weight": src_state.pop("body.0.block2.weight"),
"adapter.body.0.resnets.0.block2.bias": src_state.pop("body.0.block2.bias"),
# 0.resnets.1
"adapter.body.0.resnets.1.block1.weight": src_state.pop("body.1.block1.weight"),
"adapter.body.0.resnets.1.block1.bias": src_state.pop("body.1.block1.bias"),
"adapter.body.0.resnets.1.block2.weight": src_state.pop("body.1.block2.weight"),
"adapter.body.0.resnets.1.block2.bias": src_state.pop("body.1.block2.bias"),
# 1
"adapter.body.1.in_conv.weight": src_state.pop("body.2.in_conv.weight"),
"adapter.body.1.in_conv.bias": src_state.pop("body.2.in_conv.bias"),
# 1.resnets.0
"adapter.body.1.resnets.0.block1.weight": src_state.pop("body.2.block1.weight"),
"adapter.body.1.resnets.0.block1.bias": src_state.pop("body.2.block1.bias"),
"adapter.body.1.resnets.0.block2.weight": src_state.pop("body.2.block2.weight"),
"adapter.body.1.resnets.0.block2.bias": src_state.pop("body.2.block2.bias"),
# 1.resnets.1
"adapter.body.1.resnets.1.block1.weight": src_state.pop("body.3.block1.weight"),
"adapter.body.1.resnets.1.block1.bias": src_state.pop("body.3.block1.bias"),
"adapter.body.1.resnets.1.block2.weight": src_state.pop("body.3.block2.weight"),
"adapter.body.1.resnets.1.block2.bias": src_state.pop("body.3.block2.bias"),
# 2
"adapter.body.2.in_conv.weight": src_state.pop("body.4.in_conv.weight"),
"adapter.body.2.in_conv.bias": src_state.pop("body.4.in_conv.bias"),
# 2.resnets.0
"adapter.body.2.resnets.0.block1.weight": src_state.pop("body.4.block1.weight"),
"adapter.body.2.resnets.0.block1.bias": src_state.pop("body.4.block1.bias"),
"adapter.body.2.resnets.0.block2.weight": src_state.pop("body.4.block2.weight"),
"adapter.body.2.resnets.0.block2.bias": src_state.pop("body.4.block2.bias"),
# 2.resnets.1
"adapter.body.2.resnets.1.block1.weight": src_state.pop("body.5.block1.weight"),
"adapter.body.2.resnets.1.block1.bias": src_state.pop("body.5.block1.bias"),
"adapter.body.2.resnets.1.block2.weight": src_state.pop("body.5.block2.weight"),
"adapter.body.2.resnets.1.block2.bias": src_state.pop("body.5.block2.bias"),
# 3.resnets.0
"adapter.body.3.resnets.0.block1.weight": src_state.pop("body.6.block1.weight"),
"adapter.body.3.resnets.0.block1.bias": src_state.pop("body.6.block1.bias"),
"adapter.body.3.resnets.0.block2.weight": src_state.pop("body.6.block2.weight"),
"adapter.body.3.resnets.0.block2.bias": src_state.pop("body.6.block2.bias"),
# 3.resnets.1
"adapter.body.3.resnets.1.block1.weight": src_state.pop("body.7.block1.weight"),
"adapter.body.3.resnets.1.block1.bias": src_state.pop("body.7.block1.bias"),
"adapter.body.3.resnets.1.block2.weight": src_state.pop("body.7.block2.weight"),
"adapter.body.3.resnets.1.block2.bias": src_state.pop("body.7.block2.bias"),
}
assert len(src_state) == 0
adapter = T2IAdapter(in_channels=in_channels, adapter_type="full_adapter")
adapter.load_state_dict(res_state)
return adapter
def convert_light_adapter(src_state):
original_body_length = max([int(x.split(".")[1]) for x in src_state.keys() if "body." in x]) + 1
assert original_body_length == 4
res_state = {
# body.0.in_conv
"adapter.body.0.in_conv.weight": src_state.pop("body.0.in_conv.weight"),
"adapter.body.0.in_conv.bias": src_state.pop("body.0.in_conv.bias"),
# body.0.resnets.0
"adapter.body.0.resnets.0.block1.weight": src_state.pop("body.0.body.0.block1.weight"),
"adapter.body.0.resnets.0.block1.bias": src_state.pop("body.0.body.0.block1.bias"),
"adapter.body.0.resnets.0.block2.weight": src_state.pop("body.0.body.0.block2.weight"),
"adapter.body.0.resnets.0.block2.bias": src_state.pop("body.0.body.0.block2.bias"),
# body.0.resnets.1
"adapter.body.0.resnets.1.block1.weight": src_state.pop("body.0.body.1.block1.weight"),
"adapter.body.0.resnets.1.block1.bias": src_state.pop("body.0.body.1.block1.bias"),
"adapter.body.0.resnets.1.block2.weight": src_state.pop("body.0.body.1.block2.weight"),
"adapter.body.0.resnets.1.block2.bias": src_state.pop("body.0.body.1.block2.bias"),
# body.0.resnets.2
"adapter.body.0.resnets.2.block1.weight": src_state.pop("body.0.body.2.block1.weight"),
"adapter.body.0.resnets.2.block1.bias": src_state.pop("body.0.body.2.block1.bias"),
"adapter.body.0.resnets.2.block2.weight": src_state.pop("body.0.body.2.block2.weight"),
"adapter.body.0.resnets.2.block2.bias": src_state.pop("body.0.body.2.block2.bias"),
# body.0.resnets.3
"adapter.body.0.resnets.3.block1.weight": src_state.pop("body.0.body.3.block1.weight"),
"adapter.body.0.resnets.3.block1.bias": src_state.pop("body.0.body.3.block1.bias"),
"adapter.body.0.resnets.3.block2.weight": src_state.pop("body.0.body.3.block2.weight"),
"adapter.body.0.resnets.3.block2.bias": src_state.pop("body.0.body.3.block2.bias"),
# body.0.out_conv
"adapter.body.0.out_conv.weight": src_state.pop("body.0.out_conv.weight"),
"adapter.body.0.out_conv.bias": src_state.pop("body.0.out_conv.bias"),
# body.1.in_conv
"adapter.body.1.in_conv.weight": src_state.pop("body.1.in_conv.weight"),
"adapter.body.1.in_conv.bias": src_state.pop("body.1.in_conv.bias"),
# body.1.resnets.0
"adapter.body.1.resnets.0.block1.weight": src_state.pop("body.1.body.0.block1.weight"),
"adapter.body.1.resnets.0.block1.bias": src_state.pop("body.1.body.0.block1.bias"),
"adapter.body.1.resnets.0.block2.weight": src_state.pop("body.1.body.0.block2.weight"),
"adapter.body.1.resnets.0.block2.bias": src_state.pop("body.1.body.0.block2.bias"),
# body.1.resnets.1
"adapter.body.1.resnets.1.block1.weight": src_state.pop("body.1.body.1.block1.weight"),
"adapter.body.1.resnets.1.block1.bias": src_state.pop("body.1.body.1.block1.bias"),
"adapter.body.1.resnets.1.block2.weight": src_state.pop("body.1.body.1.block2.weight"),
"adapter.body.1.resnets.1.block2.bias": src_state.pop("body.1.body.1.block2.bias"),
# body.1.body.2
"adapter.body.1.resnets.2.block1.weight": src_state.pop("body.1.body.2.block1.weight"),
"adapter.body.1.resnets.2.block1.bias": src_state.pop("body.1.body.2.block1.bias"),
"adapter.body.1.resnets.2.block2.weight": src_state.pop("body.1.body.2.block2.weight"),
"adapter.body.1.resnets.2.block2.bias": src_state.pop("body.1.body.2.block2.bias"),
# body.1.body.3
"adapter.body.1.resnets.3.block1.weight": src_state.pop("body.1.body.3.block1.weight"),
"adapter.body.1.resnets.3.block1.bias": src_state.pop("body.1.body.3.block1.bias"),
"adapter.body.1.resnets.3.block2.weight": src_state.pop("body.1.body.3.block2.weight"),
"adapter.body.1.resnets.3.block2.bias": src_state.pop("body.1.body.3.block2.bias"),
# body.1.out_conv
"adapter.body.1.out_conv.weight": src_state.pop("body.1.out_conv.weight"),
"adapter.body.1.out_conv.bias": src_state.pop("body.1.out_conv.bias"),
# body.2.in_conv
"adapter.body.2.in_conv.weight": src_state.pop("body.2.in_conv.weight"),
"adapter.body.2.in_conv.bias": src_state.pop("body.2.in_conv.bias"),
# body.2.body.0
"adapter.body.2.resnets.0.block1.weight": src_state.pop("body.2.body.0.block1.weight"),
"adapter.body.2.resnets.0.block1.bias": src_state.pop("body.2.body.0.block1.bias"),
"adapter.body.2.resnets.0.block2.weight": src_state.pop("body.2.body.0.block2.weight"),
"adapter.body.2.resnets.0.block2.bias": src_state.pop("body.2.body.0.block2.bias"),
# body.2.body.1
"adapter.body.2.resnets.1.block1.weight": src_state.pop("body.2.body.1.block1.weight"),
"adapter.body.2.resnets.1.block1.bias": src_state.pop("body.2.body.1.block1.bias"),
"adapter.body.2.resnets.1.block2.weight": src_state.pop("body.2.body.1.block2.weight"),
"adapter.body.2.resnets.1.block2.bias": src_state.pop("body.2.body.1.block2.bias"),
# body.2.body.2
"adapter.body.2.resnets.2.block1.weight": src_state.pop("body.2.body.2.block1.weight"),
"adapter.body.2.resnets.2.block1.bias": src_state.pop("body.2.body.2.block1.bias"),
"adapter.body.2.resnets.2.block2.weight": src_state.pop("body.2.body.2.block2.weight"),
"adapter.body.2.resnets.2.block2.bias": src_state.pop("body.2.body.2.block2.bias"),
# body.2.body.3
"adapter.body.2.resnets.3.block1.weight": src_state.pop("body.2.body.3.block1.weight"),
"adapter.body.2.resnets.3.block1.bias": src_state.pop("body.2.body.3.block1.bias"),
"adapter.body.2.resnets.3.block2.weight": src_state.pop("body.2.body.3.block2.weight"),
"adapter.body.2.resnets.3.block2.bias": src_state.pop("body.2.body.3.block2.bias"),
# body.2.out_conv
"adapter.body.2.out_conv.weight": src_state.pop("body.2.out_conv.weight"),
"adapter.body.2.out_conv.bias": src_state.pop("body.2.out_conv.bias"),
# body.3.in_conv
"adapter.body.3.in_conv.weight": src_state.pop("body.3.in_conv.weight"),
"adapter.body.3.in_conv.bias": src_state.pop("body.3.in_conv.bias"),
# body.3.body.0
"adapter.body.3.resnets.0.block1.weight": src_state.pop("body.3.body.0.block1.weight"),
"adapter.body.3.resnets.0.block1.bias": src_state.pop("body.3.body.0.block1.bias"),
"adapter.body.3.resnets.0.block2.weight": src_state.pop("body.3.body.0.block2.weight"),
"adapter.body.3.resnets.0.block2.bias": src_state.pop("body.3.body.0.block2.bias"),
# body.3.body.1
"adapter.body.3.resnets.1.block1.weight": src_state.pop("body.3.body.1.block1.weight"),
"adapter.body.3.resnets.1.block1.bias": src_state.pop("body.3.body.1.block1.bias"),
"adapter.body.3.resnets.1.block2.weight": src_state.pop("body.3.body.1.block2.weight"),
"adapter.body.3.resnets.1.block2.bias": src_state.pop("body.3.body.1.block2.bias"),
# body.3.body.2
"adapter.body.3.resnets.2.block1.weight": src_state.pop("body.3.body.2.block1.weight"),
"adapter.body.3.resnets.2.block1.bias": src_state.pop("body.3.body.2.block1.bias"),
"adapter.body.3.resnets.2.block2.weight": src_state.pop("body.3.body.2.block2.weight"),
"adapter.body.3.resnets.2.block2.bias": src_state.pop("body.3.body.2.block2.bias"),
# body.3.body.3
"adapter.body.3.resnets.3.block1.weight": src_state.pop("body.3.body.3.block1.weight"),
"adapter.body.3.resnets.3.block1.bias": src_state.pop("body.3.body.3.block1.bias"),
"adapter.body.3.resnets.3.block2.weight": src_state.pop("body.3.body.3.block2.weight"),
"adapter.body.3.resnets.3.block2.bias": src_state.pop("body.3.body.3.block2.bias"),
# body.3.out_conv
"adapter.body.3.out_conv.weight": src_state.pop("body.3.out_conv.weight"),
"adapter.body.3.out_conv.bias": src_state.pop("body.3.out_conv.bias"),
}
assert len(src_state) == 0
adapter = T2IAdapter(in_channels=3, channels=[320, 640, 1280], num_res_blocks=4, adapter_type="light_adapter")
adapter.load_state_dict(res_state)
return adapter
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument(
"--checkpoint_path", default=None, type=str, required=True, help="Path to the checkpoint to convert."
)
parser.add_argument(
"--output_path", default=None, type=str, required=True, help="Path to the store the result checkpoint."
)
parser.add_argument(
"--is_adapter_light",
action="store_true",
help="Is checkpoint come from Adapter-Light architecture. ex: color-adapter",
)
parser.add_argument("--in_channels", required=False, type=int, help="Input channels for non-light adapter")
args = parser.parse_args()
src_state = torch.load(args.checkpoint_path)
if args.is_adapter_light:
adapter = convert_light_adapter(src_state)
else:
if args.in_channels is None:
raise ValueError("set `--in_channels=<n>`")
adapter = convert_adapter(src_state, args.in_channels)
adapter.save_pretrained(args.output_path)
| 0 |
hf_public_repos/diffusers | hf_public_repos/diffusers/scripts/generate_logits.py | import random
import torch
from huggingface_hub import HfApi
from diffusers import UNet2DModel
api = HfApi()
results = {}
# fmt: off
results["google_ddpm_cifar10_32"] = torch.tensor([
-0.7515, -1.6883, 0.2420, 0.0300, 0.6347, 1.3433, -1.1743, -3.7467,
1.2342, -2.2485, 0.4636, 0.8076, -0.7991, 0.3969, 0.8498, 0.9189,
-1.8887, -3.3522, 0.7639, 0.2040, 0.6271, -2.7148, -1.6316, 3.0839,
0.3186, 0.2721, -0.9759, -1.2461, 2.6257, 1.3557
])
results["google_ddpm_ema_bedroom_256"] = torch.tensor([
-2.3639, -2.5344, 0.0054, -0.6674, 1.5990, 1.0158, 0.3124, -2.1436,
1.8795, -2.5429, -0.1566, -0.3973, 1.2490, 2.6447, 1.2283, -0.5208,
-2.8154, -3.5119, 2.3838, 1.2033, 1.7201, -2.1256, -1.4576, 2.7948,
2.4204, -0.9752, -1.2546, 0.8027, 3.2758, 3.1365
])
results["CompVis_ldm_celebahq_256"] = torch.tensor([
-0.6531, -0.6891, -0.3172, -0.5375, -0.9140, -0.5367, -0.1175, -0.7869,
-0.3808, -0.4513, -0.2098, -0.0083, 0.3183, 0.5140, 0.2247, -0.1304,
-0.1302, -0.2802, -0.2084, -0.2025, -0.4967, -0.4873, -0.0861, 0.6925,
0.0250, 0.1290, -0.1543, 0.6316, 1.0460, 1.4943
])
results["google_ncsnpp_ffhq_1024"] = torch.tensor([
0.0911, 0.1107, 0.0182, 0.0435, -0.0805, -0.0608, 0.0381, 0.2172,
-0.0280, 0.1327, -0.0299, -0.0255, -0.0050, -0.1170, -0.1046, 0.0309,
0.1367, 0.1728, -0.0533, -0.0748, -0.0534, 0.1624, 0.0384, -0.1805,
-0.0707, 0.0642, 0.0220, -0.0134, -0.1333, -0.1505
])
results["google_ncsnpp_bedroom_256"] = torch.tensor([
0.1321, 0.1337, 0.0440, 0.0622, -0.0591, -0.0370, 0.0503, 0.2133,
-0.0177, 0.1415, -0.0116, -0.0112, 0.0044, -0.0980, -0.0789, 0.0395,
0.1502, 0.1785, -0.0488, -0.0514, -0.0404, 0.1539, 0.0454, -0.1559,
-0.0665, 0.0659, 0.0383, -0.0005, -0.1266, -0.1386
])
results["google_ncsnpp_celebahq_256"] = torch.tensor([
0.1154, 0.1218, 0.0307, 0.0526, -0.0711, -0.0541, 0.0366, 0.2078,
-0.0267, 0.1317, -0.0226, -0.0193, -0.0014, -0.1055, -0.0902, 0.0330,
0.1391, 0.1709, -0.0562, -0.0693, -0.0560, 0.1482, 0.0381, -0.1683,
-0.0681, 0.0661, 0.0331, -0.0046, -0.1268, -0.1431
])
results["google_ncsnpp_church_256"] = torch.tensor([
0.1192, 0.1240, 0.0414, 0.0606, -0.0557, -0.0412, 0.0430, 0.2042,
-0.0200, 0.1385, -0.0115, -0.0132, 0.0017, -0.0965, -0.0802, 0.0398,
0.1433, 0.1747, -0.0458, -0.0533, -0.0407, 0.1545, 0.0419, -0.1574,
-0.0645, 0.0626, 0.0341, -0.0010, -0.1199, -0.1390
])
results["google_ncsnpp_ffhq_256"] = torch.tensor([
0.1075, 0.1074, 0.0205, 0.0431, -0.0774, -0.0607, 0.0298, 0.2042,
-0.0320, 0.1267, -0.0281, -0.0250, -0.0064, -0.1091, -0.0946, 0.0290,
0.1328, 0.1650, -0.0580, -0.0738, -0.0586, 0.1440, 0.0337, -0.1746,
-0.0712, 0.0605, 0.0250, -0.0099, -0.1316, -0.1473
])
results["google_ddpm_cat_256"] = torch.tensor([
-1.4572, -2.0481, -0.0414, -0.6005, 1.4136, 0.5848, 0.4028, -2.7330,
1.2212, -2.1228, 0.2155, 0.4039, 0.7662, 2.0535, 0.7477, -0.3243,
-2.1758, -2.7648, 1.6947, 0.7026, 1.2338, -1.6078, -0.8682, 2.2810,
1.8574, -0.5718, -0.5586, -0.0186, 2.3415, 2.1251])
results["google_ddpm_celebahq_256"] = torch.tensor([
-1.3690, -1.9720, -0.4090, -0.6966, 1.4660, 0.9938, -0.1385, -2.7324,
0.7736, -1.8917, 0.2923, 0.4293, 0.1693, 1.4112, 1.1887, -0.3181,
-2.2160, -2.6381, 1.3170, 0.8163, 0.9240, -1.6544, -0.6099, 2.5259,
1.6430, -0.9090, -0.9392, -0.0126, 2.4268, 2.3266
])
results["google_ddpm_ema_celebahq_256"] = torch.tensor([
-1.3525, -1.9628, -0.3956, -0.6860, 1.4664, 1.0014, -0.1259, -2.7212,
0.7772, -1.8811, 0.2996, 0.4388, 0.1704, 1.4029, 1.1701, -0.3027,
-2.2053, -2.6287, 1.3350, 0.8131, 0.9274, -1.6292, -0.6098, 2.5131,
1.6505, -0.8958, -0.9298, -0.0151, 2.4257, 2.3355
])
results["google_ddpm_church_256"] = torch.tensor([
-2.0585, -2.7897, -0.2850, -0.8940, 1.9052, 0.5702, 0.6345, -3.8959,
1.5932, -3.2319, 0.1974, 0.0287, 1.7566, 2.6543, 0.8387, -0.5351,
-3.2736, -4.3375, 2.9029, 1.6390, 1.4640, -2.1701, -1.9013, 2.9341,
3.4981, -0.6255, -1.1644, -0.1591, 3.7097, 3.2066
])
results["google_ddpm_bedroom_256"] = torch.tensor([
-2.3139, -2.5594, -0.0197, -0.6785, 1.7001, 1.1606, 0.3075, -2.1740,
1.8071, -2.5630, -0.0926, -0.3811, 1.2116, 2.6246, 1.2731, -0.5398,
-2.8153, -3.6140, 2.3893, 1.3262, 1.6258, -2.1856, -1.3267, 2.8395,
2.3779, -1.0623, -1.2468, 0.8959, 3.3367, 3.2243
])
results["google_ddpm_ema_church_256"] = torch.tensor([
-2.0628, -2.7667, -0.2089, -0.8263, 2.0539, 0.5992, 0.6495, -3.8336,
1.6025, -3.2817, 0.1721, -0.0633, 1.7516, 2.7039, 0.8100, -0.5908,
-3.2113, -4.4343, 2.9257, 1.3632, 1.5562, -2.1489, -1.9894, 3.0560,
3.3396, -0.7328, -1.0417, 0.0383, 3.7093, 3.2343
])
results["google_ddpm_ema_cat_256"] = torch.tensor([
-1.4574, -2.0569, -0.0473, -0.6117, 1.4018, 0.5769, 0.4129, -2.7344,
1.2241, -2.1397, 0.2000, 0.3937, 0.7616, 2.0453, 0.7324, -0.3391,
-2.1746, -2.7744, 1.6963, 0.6921, 1.2187, -1.6172, -0.8877, 2.2439,
1.8471, -0.5839, -0.5605, -0.0464, 2.3250, 2.1219
])
# fmt: on
models = api.list_models(filter="diffusers")
for mod in models:
if "google" in mod.author or mod.modelId == "CompVis/ldm-celebahq-256":
local_checkpoint = "/home/patrick/google_checkpoints/" + mod.modelId.split("/")[-1]
print(f"Started running {mod.modelId}!!!")
if mod.modelId.startswith("CompVis"):
model = UNet2DModel.from_pretrained(local_checkpoint, subfolder="unet")
else:
model = UNet2DModel.from_pretrained(local_checkpoint)
torch.manual_seed(0)
random.seed(0)
noise = torch.randn(1, model.config.in_channels, model.config.sample_size, model.config.sample_size)
time_step = torch.tensor([10] * noise.shape[0])
with torch.no_grad():
logits = model(noise, time_step).sample
assert torch.allclose(
logits[0, 0, 0, :30], results["_".join("_".join(mod.modelId.split("/")).split("-"))], atol=1e-3
)
print(f"{mod.modelId} has passed successfully!!!")
| 0 |
hf_public_repos/diffusers | hf_public_repos/diffusers/scripts/convert_original_stable_diffusion_to_diffusers.py | # coding=utf-8
# Copyright 2023 The HuggingFace Inc. team.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
""" Conversion script for the LDM checkpoints. """
import argparse
import torch
from diffusers.pipelines.stable_diffusion.convert_from_ckpt import download_from_original_stable_diffusion_ckpt
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument(
"--checkpoint_path", default=None, type=str, required=True, help="Path to the checkpoint to convert."
)
# !wget https://raw.githubusercontent.com/CompVis/stable-diffusion/main/configs/stable-diffusion/v1-inference.yaml
parser.add_argument(
"--original_config_file",
default=None,
type=str,
help="The YAML config file corresponding to the original architecture.",
)
parser.add_argument(
"--num_in_channels",
default=None,
type=int,
help="The number of input channels. If `None` number of input channels will be automatically inferred.",
)
parser.add_argument(
"--scheduler_type",
default="pndm",
type=str,
help="Type of scheduler to use. Should be one of ['pndm', 'lms', 'ddim', 'euler', 'euler-ancestral', 'dpm']",
)
parser.add_argument(
"--pipeline_type",
default=None,
type=str,
help=(
"The pipeline type. One of 'FrozenOpenCLIPEmbedder', 'FrozenCLIPEmbedder', 'PaintByExample'"
". If `None` pipeline will be automatically inferred."
),
)
parser.add_argument(
"--image_size",
default=None,
type=int,
help=(
"The image size that the model was trained on. Use 512 for Stable Diffusion v1.X and Stable Siffusion v2"
" Base. Use 768 for Stable Diffusion v2."
),
)
parser.add_argument(
"--prediction_type",
default=None,
type=str,
help=(
"The prediction type that the model was trained on. Use 'epsilon' for Stable Diffusion v1.X and Stable"
" Diffusion v2 Base. Use 'v_prediction' for Stable Diffusion v2."
),
)
parser.add_argument(
"--extract_ema",
action="store_true",
help=(
"Only relevant for checkpoints that have both EMA and non-EMA weights. Whether to extract the EMA weights"
" or not. Defaults to `False`. Add `--extract_ema` to extract the EMA weights. EMA weights usually yield"
" higher quality images for inference. Non-EMA weights are usually better to continue fine-tuning."
),
)
parser.add_argument(
"--upcast_attention",
action="store_true",
help=(
"Whether the attention computation should always be upcasted. This is necessary when running stable"
" diffusion 2.1."
),
)
parser.add_argument(
"--from_safetensors",
action="store_true",
help="If `--checkpoint_path` is in `safetensors` format, load checkpoint with safetensors instead of PyTorch.",
)
parser.add_argument(
"--to_safetensors",
action="store_true",
help="Whether to store pipeline in safetensors format or not.",
)
parser.add_argument("--dump_path", default=None, type=str, required=True, help="Path to the output model.")
parser.add_argument("--device", type=str, help="Device to use (e.g. cpu, cuda:0, cuda:1, etc.)")
parser.add_argument(
"--stable_unclip",
type=str,
default=None,
required=False,
help="Set if this is a stable unCLIP model. One of 'txt2img' or 'img2img'.",
)
parser.add_argument(
"--stable_unclip_prior",
type=str,
default=None,
required=False,
help="Set if this is a stable unCLIP txt2img model. Selects which prior to use. If `--stable_unclip` is set to `txt2img`, the karlo prior (https://huggingface.co/kakaobrain/karlo-v1-alpha/tree/main/prior) is selected by default.",
)
parser.add_argument(
"--clip_stats_path",
type=str,
help="Path to the clip stats file. Only required if the stable unclip model's config specifies `model.params.noise_aug_config.params.clip_stats_path`.",
required=False,
)
parser.add_argument(
"--controlnet", action="store_true", default=None, help="Set flag if this is a controlnet checkpoint."
)
parser.add_argument("--half", action="store_true", help="Save weights in half precision.")
parser.add_argument(
"--vae_path",
type=str,
default=None,
required=False,
help="Set to a path, hub id to an already converted vae to not convert it again.",
)
args = parser.parse_args()
pipe = download_from_original_stable_diffusion_ckpt(
checkpoint_path=args.checkpoint_path,
original_config_file=args.original_config_file,
image_size=args.image_size,
prediction_type=args.prediction_type,
model_type=args.pipeline_type,
extract_ema=args.extract_ema,
scheduler_type=args.scheduler_type,
num_in_channels=args.num_in_channels,
upcast_attention=args.upcast_attention,
from_safetensors=args.from_safetensors,
device=args.device,
stable_unclip=args.stable_unclip,
stable_unclip_prior=args.stable_unclip_prior,
clip_stats_path=args.clip_stats_path,
controlnet=args.controlnet,
vae_path=args.vae_path,
)
if args.half:
pipe.to(torch_dtype=torch.float16)
if args.controlnet:
# only save the controlnet model
pipe.controlnet.save_pretrained(args.dump_path, safe_serialization=args.to_safetensors)
else:
pipe.save_pretrained(args.dump_path, safe_serialization=args.to_safetensors)
| 0 |
hf_public_repos/diffusers | hf_public_repos/diffusers/scripts/convert_original_audioldm_to_diffusers.py | # coding=utf-8
# Copyright 2023 The HuggingFace Inc. team.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
""" Conversion script for the AudioLDM checkpoints."""
import argparse
import re
import torch
from transformers import (
AutoTokenizer,
ClapTextConfig,
ClapTextModelWithProjection,
SpeechT5HifiGan,
SpeechT5HifiGanConfig,
)
from diffusers import (
AudioLDMPipeline,
AutoencoderKL,
DDIMScheduler,
DPMSolverMultistepScheduler,
EulerAncestralDiscreteScheduler,
EulerDiscreteScheduler,
HeunDiscreteScheduler,
LMSDiscreteScheduler,
PNDMScheduler,
UNet2DConditionModel,
)
from diffusers.utils import is_omegaconf_available, is_safetensors_available
from diffusers.utils.import_utils import BACKENDS_MAPPING
# Copied from diffusers.pipelines.stable_diffusion.convert_from_ckpt.shave_segments
def shave_segments(path, n_shave_prefix_segments=1):
"""
Removes segments. Positive values shave the first segments, negative shave the last segments.
"""
if n_shave_prefix_segments >= 0:
return ".".join(path.split(".")[n_shave_prefix_segments:])
else:
return ".".join(path.split(".")[:n_shave_prefix_segments])
# Copied from diffusers.pipelines.stable_diffusion.convert_from_ckpt.renew_resnet_paths
def renew_resnet_paths(old_list, n_shave_prefix_segments=0):
"""
Updates paths inside resnets to the new naming scheme (local renaming)
"""
mapping = []
for old_item in old_list:
new_item = old_item.replace("in_layers.0", "norm1")
new_item = new_item.replace("in_layers.2", "conv1")
new_item = new_item.replace("out_layers.0", "norm2")
new_item = new_item.replace("out_layers.3", "conv2")
new_item = new_item.replace("emb_layers.1", "time_emb_proj")
new_item = new_item.replace("skip_connection", "conv_shortcut")
new_item = shave_segments(new_item, n_shave_prefix_segments=n_shave_prefix_segments)
mapping.append({"old": old_item, "new": new_item})
return mapping
# Copied from diffusers.pipelines.stable_diffusion.convert_from_ckpt.renew_vae_resnet_paths
def renew_vae_resnet_paths(old_list, n_shave_prefix_segments=0):
"""
Updates paths inside resnets to the new naming scheme (local renaming)
"""
mapping = []
for old_item in old_list:
new_item = old_item
new_item = new_item.replace("nin_shortcut", "conv_shortcut")
new_item = shave_segments(new_item, n_shave_prefix_segments=n_shave_prefix_segments)
mapping.append({"old": old_item, "new": new_item})
return mapping
# Copied from diffusers.pipelines.stable_diffusion.convert_from_ckpt.renew_attention_paths
def renew_attention_paths(old_list):
"""
Updates paths inside attentions to the new naming scheme (local renaming)
"""
mapping = []
for old_item in old_list:
new_item = old_item
# new_item = new_item.replace('norm.weight', 'group_norm.weight')
# new_item = new_item.replace('norm.bias', 'group_norm.bias')
# new_item = new_item.replace('proj_out.weight', 'proj_attn.weight')
# new_item = new_item.replace('proj_out.bias', 'proj_attn.bias')
# new_item = shave_segments(new_item, n_shave_prefix_segments=n_shave_prefix_segments)
mapping.append({"old": old_item, "new": new_item})
return mapping
# Copied from diffusers.pipelines.stable_diffusion.convert_from_ckpt.renew_vae_attention_paths
def renew_vae_attention_paths(old_list, n_shave_prefix_segments=0):
"""
Updates paths inside attentions to the new naming scheme (local renaming)
"""
mapping = []
for old_item in old_list:
new_item = old_item
new_item = new_item.replace("norm.weight", "group_norm.weight")
new_item = new_item.replace("norm.bias", "group_norm.bias")
new_item = new_item.replace("q.weight", "query.weight")
new_item = new_item.replace("q.bias", "query.bias")
new_item = new_item.replace("k.weight", "key.weight")
new_item = new_item.replace("k.bias", "key.bias")
new_item = new_item.replace("v.weight", "value.weight")
new_item = new_item.replace("v.bias", "value.bias")
new_item = new_item.replace("proj_out.weight", "proj_attn.weight")
new_item = new_item.replace("proj_out.bias", "proj_attn.bias")
new_item = shave_segments(new_item, n_shave_prefix_segments=n_shave_prefix_segments)
mapping.append({"old": old_item, "new": new_item})
return mapping
# Copied from diffusers.pipelines.stable_diffusion.convert_from_ckpt.assign_to_checkpoint
def assign_to_checkpoint(
paths, checkpoint, old_checkpoint, attention_paths_to_split=None, additional_replacements=None, config=None
):
"""
This does the final conversion step: take locally converted weights and apply a global renaming to them. It splits
attention layers, and takes into account additional replacements that may arise.
Assigns the weights to the new checkpoint.
"""
assert isinstance(paths, list), "Paths should be a list of dicts containing 'old' and 'new' keys."
# Splits the attention layers into three variables.
if attention_paths_to_split is not None:
for path, path_map in attention_paths_to_split.items():
old_tensor = old_checkpoint[path]
channels = old_tensor.shape[0] // 3
target_shape = (-1, channels) if len(old_tensor.shape) == 3 else (-1)
num_heads = old_tensor.shape[0] // config["num_head_channels"] // 3
old_tensor = old_tensor.reshape((num_heads, 3 * channels // num_heads) + old_tensor.shape[1:])
query, key, value = old_tensor.split(channels // num_heads, dim=1)
checkpoint[path_map["query"]] = query.reshape(target_shape)
checkpoint[path_map["key"]] = key.reshape(target_shape)
checkpoint[path_map["value"]] = value.reshape(target_shape)
for path in paths:
new_path = path["new"]
# These have already been assigned
if attention_paths_to_split is not None and new_path in attention_paths_to_split:
continue
# Global renaming happens here
new_path = new_path.replace("middle_block.0", "mid_block.resnets.0")
new_path = new_path.replace("middle_block.1", "mid_block.attentions.0")
new_path = new_path.replace("middle_block.2", "mid_block.resnets.1")
if additional_replacements is not None:
for replacement in additional_replacements:
new_path = new_path.replace(replacement["old"], replacement["new"])
# proj_attn.weight has to be converted from conv 1D to linear
if "proj_attn.weight" in new_path:
checkpoint[new_path] = old_checkpoint[path["old"]][:, :, 0]
else:
checkpoint[new_path] = old_checkpoint[path["old"]]
# Copied from diffusers.pipelines.stable_diffusion.convert_from_ckpt.conv_attn_to_linear
def conv_attn_to_linear(checkpoint):
keys = list(checkpoint.keys())
attn_keys = ["query.weight", "key.weight", "value.weight"]
for key in keys:
if ".".join(key.split(".")[-2:]) in attn_keys:
if checkpoint[key].ndim > 2:
checkpoint[key] = checkpoint[key][:, :, 0, 0]
elif "proj_attn.weight" in key:
if checkpoint[key].ndim > 2:
checkpoint[key] = checkpoint[key][:, :, 0]
def create_unet_diffusers_config(original_config, image_size: int):
"""
Creates a UNet config for diffusers based on the config of the original AudioLDM model.
"""
unet_params = original_config.model.params.unet_config.params
vae_params = original_config.model.params.first_stage_config.params.ddconfig
block_out_channels = [unet_params.model_channels * mult for mult in unet_params.channel_mult]
down_block_types = []
resolution = 1
for i in range(len(block_out_channels)):
block_type = "CrossAttnDownBlock2D" if resolution in unet_params.attention_resolutions else "DownBlock2D"
down_block_types.append(block_type)
if i != len(block_out_channels) - 1:
resolution *= 2
up_block_types = []
for i in range(len(block_out_channels)):
block_type = "CrossAttnUpBlock2D" if resolution in unet_params.attention_resolutions else "UpBlock2D"
up_block_types.append(block_type)
resolution //= 2
vae_scale_factor = 2 ** (len(vae_params.ch_mult) - 1)
cross_attention_dim = (
unet_params.cross_attention_dim if "cross_attention_dim" in unet_params else block_out_channels
)
class_embed_type = "simple_projection" if "extra_film_condition_dim" in unet_params else None
projection_class_embeddings_input_dim = (
unet_params.extra_film_condition_dim if "extra_film_condition_dim" in unet_params else None
)
class_embeddings_concat = unet_params.extra_film_use_concat if "extra_film_use_concat" in unet_params else None
config = {
"sample_size": image_size // vae_scale_factor,
"in_channels": unet_params.in_channels,
"out_channels": unet_params.out_channels,
"down_block_types": tuple(down_block_types),
"up_block_types": tuple(up_block_types),
"block_out_channels": tuple(block_out_channels),
"layers_per_block": unet_params.num_res_blocks,
"cross_attention_dim": cross_attention_dim,
"class_embed_type": class_embed_type,
"projection_class_embeddings_input_dim": projection_class_embeddings_input_dim,
"class_embeddings_concat": class_embeddings_concat,
}
return config
# Adapted from diffusers.pipelines.stable_diffusion.convert_from_ckpt.create_vae_diffusers_config
def create_vae_diffusers_config(original_config, checkpoint, image_size: int):
"""
Creates a VAE config for diffusers based on the config of the original AudioLDM model. Compared to the original
Stable Diffusion conversion, this function passes a *learnt* VAE scaling factor to the diffusers VAE.
"""
vae_params = original_config.model.params.first_stage_config.params.ddconfig
_ = original_config.model.params.first_stage_config.params.embed_dim
block_out_channels = [vae_params.ch * mult for mult in vae_params.ch_mult]
down_block_types = ["DownEncoderBlock2D"] * len(block_out_channels)
up_block_types = ["UpDecoderBlock2D"] * len(block_out_channels)
scaling_factor = checkpoint["scale_factor"] if "scale_by_std" in original_config.model.params else 0.18215
config = {
"sample_size": image_size,
"in_channels": vae_params.in_channels,
"out_channels": vae_params.out_ch,
"down_block_types": tuple(down_block_types),
"up_block_types": tuple(up_block_types),
"block_out_channels": tuple(block_out_channels),
"latent_channels": vae_params.z_channels,
"layers_per_block": vae_params.num_res_blocks,
"scaling_factor": float(scaling_factor),
}
return config
# Copied from diffusers.pipelines.stable_diffusion.convert_from_ckpt.create_diffusers_schedular
def create_diffusers_schedular(original_config):
schedular = DDIMScheduler(
num_train_timesteps=original_config.model.params.timesteps,
beta_start=original_config.model.params.linear_start,
beta_end=original_config.model.params.linear_end,
beta_schedule="scaled_linear",
)
return schedular
# Adapted from diffusers.pipelines.stable_diffusion.convert_from_ckpt.convert_ldm_unet_checkpoint
def convert_ldm_unet_checkpoint(checkpoint, config, path=None, extract_ema=False):
"""
Takes a state dict and a config, and returns a converted checkpoint. Compared to the original Stable Diffusion
conversion, this function additionally converts the learnt film embedding linear layer.
"""
# extract state_dict for UNet
unet_state_dict = {}
keys = list(checkpoint.keys())
unet_key = "model.diffusion_model."
# at least a 100 parameters have to start with `model_ema` in order for the checkpoint to be EMA
if sum(k.startswith("model_ema") for k in keys) > 100 and extract_ema:
print(f"Checkpoint {path} has both EMA and non-EMA weights.")
print(
"In this conversion only the EMA weights are extracted. If you want to instead extract the non-EMA"
" weights (useful to continue fine-tuning), please make sure to remove the `--extract_ema` flag."
)
for key in keys:
if key.startswith("model.diffusion_model"):
flat_ema_key = "model_ema." + "".join(key.split(".")[1:])
unet_state_dict[key.replace(unet_key, "")] = checkpoint.pop(flat_ema_key)
else:
if sum(k.startswith("model_ema") for k in keys) > 100:
print(
"In this conversion only the non-EMA weights are extracted. If you want to instead extract the EMA"
" weights (usually better for inference), please make sure to add the `--extract_ema` flag."
)
for key in keys:
if key.startswith(unet_key):
unet_state_dict[key.replace(unet_key, "")] = checkpoint.pop(key)
new_checkpoint = {}
new_checkpoint["time_embedding.linear_1.weight"] = unet_state_dict["time_embed.0.weight"]
new_checkpoint["time_embedding.linear_1.bias"] = unet_state_dict["time_embed.0.bias"]
new_checkpoint["time_embedding.linear_2.weight"] = unet_state_dict["time_embed.2.weight"]
new_checkpoint["time_embedding.linear_2.bias"] = unet_state_dict["time_embed.2.bias"]
new_checkpoint["class_embedding.weight"] = unet_state_dict["film_emb.weight"]
new_checkpoint["class_embedding.bias"] = unet_state_dict["film_emb.bias"]
new_checkpoint["conv_in.weight"] = unet_state_dict["input_blocks.0.0.weight"]
new_checkpoint["conv_in.bias"] = unet_state_dict["input_blocks.0.0.bias"]
new_checkpoint["conv_norm_out.weight"] = unet_state_dict["out.0.weight"]
new_checkpoint["conv_norm_out.bias"] = unet_state_dict["out.0.bias"]
new_checkpoint["conv_out.weight"] = unet_state_dict["out.2.weight"]
new_checkpoint["conv_out.bias"] = unet_state_dict["out.2.bias"]
# Retrieves the keys for the input blocks only
num_input_blocks = len({".".join(layer.split(".")[:2]) for layer in unet_state_dict if "input_blocks" in layer})
input_blocks = {
layer_id: [key for key in unet_state_dict if f"input_blocks.{layer_id}" in key]
for layer_id in range(num_input_blocks)
}
# Retrieves the keys for the middle blocks only
num_middle_blocks = len({".".join(layer.split(".")[:2]) for layer in unet_state_dict if "middle_block" in layer})
middle_blocks = {
layer_id: [key for key in unet_state_dict if f"middle_block.{layer_id}" in key]
for layer_id in range(num_middle_blocks)
}
# Retrieves the keys for the output blocks only
num_output_blocks = len({".".join(layer.split(".")[:2]) for layer in unet_state_dict if "output_blocks" in layer})
output_blocks = {
layer_id: [key for key in unet_state_dict if f"output_blocks.{layer_id}" in key]
for layer_id in range(num_output_blocks)
}
for i in range(1, num_input_blocks):
block_id = (i - 1) // (config["layers_per_block"] + 1)
layer_in_block_id = (i - 1) % (config["layers_per_block"] + 1)
resnets = [
key for key in input_blocks[i] if f"input_blocks.{i}.0" in key and f"input_blocks.{i}.0.op" not in key
]
attentions = [key for key in input_blocks[i] if f"input_blocks.{i}.1" in key]
if f"input_blocks.{i}.0.op.weight" in unet_state_dict:
new_checkpoint[f"down_blocks.{block_id}.downsamplers.0.conv.weight"] = unet_state_dict.pop(
f"input_blocks.{i}.0.op.weight"
)
new_checkpoint[f"down_blocks.{block_id}.downsamplers.0.conv.bias"] = unet_state_dict.pop(
f"input_blocks.{i}.0.op.bias"
)
paths = renew_resnet_paths(resnets)
meta_path = {"old": f"input_blocks.{i}.0", "new": f"down_blocks.{block_id}.resnets.{layer_in_block_id}"}
assign_to_checkpoint(
paths, new_checkpoint, unet_state_dict, additional_replacements=[meta_path], config=config
)
if len(attentions):
paths = renew_attention_paths(attentions)
meta_path = {"old": f"input_blocks.{i}.1", "new": f"down_blocks.{block_id}.attentions.{layer_in_block_id}"}
assign_to_checkpoint(
paths, new_checkpoint, unet_state_dict, additional_replacements=[meta_path], config=config
)
resnet_0 = middle_blocks[0]
attentions = middle_blocks[1]
resnet_1 = middle_blocks[2]
resnet_0_paths = renew_resnet_paths(resnet_0)
assign_to_checkpoint(resnet_0_paths, new_checkpoint, unet_state_dict, config=config)
resnet_1_paths = renew_resnet_paths(resnet_1)
assign_to_checkpoint(resnet_1_paths, new_checkpoint, unet_state_dict, config=config)
attentions_paths = renew_attention_paths(attentions)
meta_path = {"old": "middle_block.1", "new": "mid_block.attentions.0"}
assign_to_checkpoint(
attentions_paths, new_checkpoint, unet_state_dict, additional_replacements=[meta_path], config=config
)
for i in range(num_output_blocks):
block_id = i // (config["layers_per_block"] + 1)
layer_in_block_id = i % (config["layers_per_block"] + 1)
output_block_layers = [shave_segments(name, 2) for name in output_blocks[i]]
output_block_list = {}
for layer in output_block_layers:
layer_id, layer_name = layer.split(".")[0], shave_segments(layer, 1)
if layer_id in output_block_list:
output_block_list[layer_id].append(layer_name)
else:
output_block_list[layer_id] = [layer_name]
if len(output_block_list) > 1:
resnets = [key for key in output_blocks[i] if f"output_blocks.{i}.0" in key]
attentions = [key for key in output_blocks[i] if f"output_blocks.{i}.1" in key]
resnet_0_paths = renew_resnet_paths(resnets)
paths = renew_resnet_paths(resnets)
meta_path = {"old": f"output_blocks.{i}.0", "new": f"up_blocks.{block_id}.resnets.{layer_in_block_id}"}
assign_to_checkpoint(
paths, new_checkpoint, unet_state_dict, additional_replacements=[meta_path], config=config
)
output_block_list = {k: sorted(v) for k, v in output_block_list.items()}
if ["conv.bias", "conv.weight"] in output_block_list.values():
index = list(output_block_list.values()).index(["conv.bias", "conv.weight"])
new_checkpoint[f"up_blocks.{block_id}.upsamplers.0.conv.weight"] = unet_state_dict[
f"output_blocks.{i}.{index}.conv.weight"
]
new_checkpoint[f"up_blocks.{block_id}.upsamplers.0.conv.bias"] = unet_state_dict[
f"output_blocks.{i}.{index}.conv.bias"
]
# Clear attentions as they have been attributed above.
if len(attentions) == 2:
attentions = []
if len(attentions):
paths = renew_attention_paths(attentions)
meta_path = {
"old": f"output_blocks.{i}.1",
"new": f"up_blocks.{block_id}.attentions.{layer_in_block_id}",
}
assign_to_checkpoint(
paths, new_checkpoint, unet_state_dict, additional_replacements=[meta_path], config=config
)
else:
resnet_0_paths = renew_resnet_paths(output_block_layers, n_shave_prefix_segments=1)
for path in resnet_0_paths:
old_path = ".".join(["output_blocks", str(i), path["old"]])
new_path = ".".join(["up_blocks", str(block_id), "resnets", str(layer_in_block_id), path["new"]])
new_checkpoint[new_path] = unet_state_dict[old_path]
return new_checkpoint
# Copied from diffusers.pipelines.stable_diffusion.convert_from_ckpt.convert_ldm_vae_checkpoint
def convert_ldm_vae_checkpoint(checkpoint, config):
# extract state dict for VAE
vae_state_dict = {}
vae_key = "first_stage_model."
keys = list(checkpoint.keys())
for key in keys:
if key.startswith(vae_key):
vae_state_dict[key.replace(vae_key, "")] = checkpoint.get(key)
new_checkpoint = {}
new_checkpoint["encoder.conv_in.weight"] = vae_state_dict["encoder.conv_in.weight"]
new_checkpoint["encoder.conv_in.bias"] = vae_state_dict["encoder.conv_in.bias"]
new_checkpoint["encoder.conv_out.weight"] = vae_state_dict["encoder.conv_out.weight"]
new_checkpoint["encoder.conv_out.bias"] = vae_state_dict["encoder.conv_out.bias"]
new_checkpoint["encoder.conv_norm_out.weight"] = vae_state_dict["encoder.norm_out.weight"]
new_checkpoint["encoder.conv_norm_out.bias"] = vae_state_dict["encoder.norm_out.bias"]
new_checkpoint["decoder.conv_in.weight"] = vae_state_dict["decoder.conv_in.weight"]
new_checkpoint["decoder.conv_in.bias"] = vae_state_dict["decoder.conv_in.bias"]
new_checkpoint["decoder.conv_out.weight"] = vae_state_dict["decoder.conv_out.weight"]
new_checkpoint["decoder.conv_out.bias"] = vae_state_dict["decoder.conv_out.bias"]
new_checkpoint["decoder.conv_norm_out.weight"] = vae_state_dict["decoder.norm_out.weight"]
new_checkpoint["decoder.conv_norm_out.bias"] = vae_state_dict["decoder.norm_out.bias"]
new_checkpoint["quant_conv.weight"] = vae_state_dict["quant_conv.weight"]
new_checkpoint["quant_conv.bias"] = vae_state_dict["quant_conv.bias"]
new_checkpoint["post_quant_conv.weight"] = vae_state_dict["post_quant_conv.weight"]
new_checkpoint["post_quant_conv.bias"] = vae_state_dict["post_quant_conv.bias"]
# Retrieves the keys for the encoder down blocks only
num_down_blocks = len({".".join(layer.split(".")[:3]) for layer in vae_state_dict if "encoder.down" in layer})
down_blocks = {
layer_id: [key for key in vae_state_dict if f"down.{layer_id}" in key] for layer_id in range(num_down_blocks)
}
# Retrieves the keys for the decoder up blocks only
num_up_blocks = len({".".join(layer.split(".")[:3]) for layer in vae_state_dict if "decoder.up" in layer})
up_blocks = {
layer_id: [key for key in vae_state_dict if f"up.{layer_id}" in key] for layer_id in range(num_up_blocks)
}
for i in range(num_down_blocks):
resnets = [key for key in down_blocks[i] if f"down.{i}" in key and f"down.{i}.downsample" not in key]
if f"encoder.down.{i}.downsample.conv.weight" in vae_state_dict:
new_checkpoint[f"encoder.down_blocks.{i}.downsamplers.0.conv.weight"] = vae_state_dict.pop(
f"encoder.down.{i}.downsample.conv.weight"
)
new_checkpoint[f"encoder.down_blocks.{i}.downsamplers.0.conv.bias"] = vae_state_dict.pop(
f"encoder.down.{i}.downsample.conv.bias"
)
paths = renew_vae_resnet_paths(resnets)
meta_path = {"old": f"down.{i}.block", "new": f"down_blocks.{i}.resnets"}
assign_to_checkpoint(paths, new_checkpoint, vae_state_dict, additional_replacements=[meta_path], config=config)
mid_resnets = [key for key in vae_state_dict if "encoder.mid.block" in key]
num_mid_res_blocks = 2
for i in range(1, num_mid_res_blocks + 1):
resnets = [key for key in mid_resnets if f"encoder.mid.block_{i}" in key]
paths = renew_vae_resnet_paths(resnets)
meta_path = {"old": f"mid.block_{i}", "new": f"mid_block.resnets.{i - 1}"}
assign_to_checkpoint(paths, new_checkpoint, vae_state_dict, additional_replacements=[meta_path], config=config)
mid_attentions = [key for key in vae_state_dict if "encoder.mid.attn" in key]
paths = renew_vae_attention_paths(mid_attentions)
meta_path = {"old": "mid.attn_1", "new": "mid_block.attentions.0"}
assign_to_checkpoint(paths, new_checkpoint, vae_state_dict, additional_replacements=[meta_path], config=config)
conv_attn_to_linear(new_checkpoint)
for i in range(num_up_blocks):
block_id = num_up_blocks - 1 - i
resnets = [
key for key in up_blocks[block_id] if f"up.{block_id}" in key and f"up.{block_id}.upsample" not in key
]
if f"decoder.up.{block_id}.upsample.conv.weight" in vae_state_dict:
new_checkpoint[f"decoder.up_blocks.{i}.upsamplers.0.conv.weight"] = vae_state_dict[
f"decoder.up.{block_id}.upsample.conv.weight"
]
new_checkpoint[f"decoder.up_blocks.{i}.upsamplers.0.conv.bias"] = vae_state_dict[
f"decoder.up.{block_id}.upsample.conv.bias"
]
paths = renew_vae_resnet_paths(resnets)
meta_path = {"old": f"up.{block_id}.block", "new": f"up_blocks.{i}.resnets"}
assign_to_checkpoint(paths, new_checkpoint, vae_state_dict, additional_replacements=[meta_path], config=config)
mid_resnets = [key for key in vae_state_dict if "decoder.mid.block" in key]
num_mid_res_blocks = 2
for i in range(1, num_mid_res_blocks + 1):
resnets = [key for key in mid_resnets if f"decoder.mid.block_{i}" in key]
paths = renew_vae_resnet_paths(resnets)
meta_path = {"old": f"mid.block_{i}", "new": f"mid_block.resnets.{i - 1}"}
assign_to_checkpoint(paths, new_checkpoint, vae_state_dict, additional_replacements=[meta_path], config=config)
mid_attentions = [key for key in vae_state_dict if "decoder.mid.attn" in key]
paths = renew_vae_attention_paths(mid_attentions)
meta_path = {"old": "mid.attn_1", "new": "mid_block.attentions.0"}
assign_to_checkpoint(paths, new_checkpoint, vae_state_dict, additional_replacements=[meta_path], config=config)
conv_attn_to_linear(new_checkpoint)
return new_checkpoint
CLAP_KEYS_TO_MODIFY_MAPPING = {
"text_branch": "text_model",
"attn": "attention.self",
"self.proj": "output.dense",
"attention.self_mask": "attn_mask",
"mlp.fc1": "intermediate.dense",
"mlp.fc2": "output.dense",
"norm1": "layernorm_before",
"norm2": "layernorm_after",
"bn0": "batch_norm",
}
CLAP_KEYS_TO_IGNORE = ["text_transform"]
CLAP_EXPECTED_MISSING_KEYS = ["text_model.embeddings.token_type_ids"]
def convert_open_clap_checkpoint(checkpoint):
"""
Takes a state dict and returns a converted CLAP checkpoint.
"""
# extract state dict for CLAP text embedding model, discarding the audio component
model_state_dict = {}
model_key = "cond_stage_model.model.text_"
keys = list(checkpoint.keys())
for key in keys:
if key.startswith(model_key):
model_state_dict[key.replace(model_key, "text_")] = checkpoint.get(key)
new_checkpoint = {}
sequential_layers_pattern = r".*sequential.(\d+).*"
text_projection_pattern = r".*_projection.(\d+).*"
for key, value in model_state_dict.items():
# check if key should be ignored in mapping
if key.split(".")[0] in CLAP_KEYS_TO_IGNORE:
continue
# check if any key needs to be modified
for key_to_modify, new_key in CLAP_KEYS_TO_MODIFY_MAPPING.items():
if key_to_modify in key:
key = key.replace(key_to_modify, new_key)
if re.match(sequential_layers_pattern, key):
# replace sequential layers with list
sequential_layer = re.match(sequential_layers_pattern, key).group(1)
key = key.replace(f"sequential.{sequential_layer}.", f"layers.{int(sequential_layer)//3}.linear.")
elif re.match(text_projection_pattern, key):
projecton_layer = int(re.match(text_projection_pattern, key).group(1))
# Because in CLAP they use `nn.Sequential`...
transformers_projection_layer = 1 if projecton_layer == 0 else 2
key = key.replace(f"_projection.{projecton_layer}.", f"_projection.linear{transformers_projection_layer}.")
if "audio" and "qkv" in key:
# split qkv into query key and value
mixed_qkv = value
qkv_dim = mixed_qkv.size(0) // 3
query_layer = mixed_qkv[:qkv_dim]
key_layer = mixed_qkv[qkv_dim : qkv_dim * 2]
value_layer = mixed_qkv[qkv_dim * 2 :]
new_checkpoint[key.replace("qkv", "query")] = query_layer
new_checkpoint[key.replace("qkv", "key")] = key_layer
new_checkpoint[key.replace("qkv", "value")] = value_layer
else:
new_checkpoint[key] = value
return new_checkpoint
def create_transformers_vocoder_config(original_config):
"""
Creates a config for transformers SpeechT5HifiGan based on the config of the vocoder model.
"""
vocoder_params = original_config.model.params.vocoder_config.params
config = {
"model_in_dim": vocoder_params.num_mels,
"sampling_rate": vocoder_params.sampling_rate,
"upsample_initial_channel": vocoder_params.upsample_initial_channel,
"upsample_rates": list(vocoder_params.upsample_rates),
"upsample_kernel_sizes": list(vocoder_params.upsample_kernel_sizes),
"resblock_kernel_sizes": list(vocoder_params.resblock_kernel_sizes),
"resblock_dilation_sizes": [
list(resblock_dilation) for resblock_dilation in vocoder_params.resblock_dilation_sizes
],
"normalize_before": False,
}
return config
def convert_hifigan_checkpoint(checkpoint, config):
"""
Takes a state dict and config, and returns a converted HiFiGAN vocoder checkpoint.
"""
# extract state dict for vocoder
vocoder_state_dict = {}
vocoder_key = "first_stage_model.vocoder."
keys = list(checkpoint.keys())
for key in keys:
if key.startswith(vocoder_key):
vocoder_state_dict[key.replace(vocoder_key, "")] = checkpoint.get(key)
# fix upsampler keys, everything else is correct already
for i in range(len(config.upsample_rates)):
vocoder_state_dict[f"upsampler.{i}.weight"] = vocoder_state_dict.pop(f"ups.{i}.weight")
vocoder_state_dict[f"upsampler.{i}.bias"] = vocoder_state_dict.pop(f"ups.{i}.bias")
if not config.normalize_before:
# if we don't set normalize_before then these variables are unused, so we set them to their initialised values
vocoder_state_dict["mean"] = torch.zeros(config.model_in_dim)
vocoder_state_dict["scale"] = torch.ones(config.model_in_dim)
return vocoder_state_dict
# Adapted from https://huggingface.co/spaces/haoheliu/audioldm-text-to-audio-generation/blob/84a0384742a22bd80c44e903e241f0623e874f1d/audioldm/utils.py#L72-L73
DEFAULT_CONFIG = {
"model": {
"params": {
"linear_start": 0.0015,
"linear_end": 0.0195,
"timesteps": 1000,
"channels": 8,
"scale_by_std": True,
"unet_config": {
"target": "audioldm.latent_diffusion.openaimodel.UNetModel",
"params": {
"extra_film_condition_dim": 512,
"extra_film_use_concat": True,
"in_channels": 8,
"out_channels": 8,
"model_channels": 128,
"attention_resolutions": [8, 4, 2],
"num_res_blocks": 2,
"channel_mult": [1, 2, 3, 5],
"num_head_channels": 32,
},
},
"first_stage_config": {
"target": "audioldm.variational_autoencoder.autoencoder.AutoencoderKL",
"params": {
"embed_dim": 8,
"ddconfig": {
"z_channels": 8,
"resolution": 256,
"in_channels": 1,
"out_ch": 1,
"ch": 128,
"ch_mult": [1, 2, 4],
"num_res_blocks": 2,
},
},
},
"vocoder_config": {
"target": "audioldm.first_stage_model.vocoder",
"params": {
"upsample_rates": [5, 4, 2, 2, 2],
"upsample_kernel_sizes": [16, 16, 8, 4, 4],
"upsample_initial_channel": 1024,
"resblock_kernel_sizes": [3, 7, 11],
"resblock_dilation_sizes": [[1, 3, 5], [1, 3, 5], [1, 3, 5]],
"num_mels": 64,
"sampling_rate": 16000,
},
},
},
},
}
def load_pipeline_from_original_audioldm_ckpt(
checkpoint_path: str,
original_config_file: str = None,
image_size: int = 512,
prediction_type: str = None,
extract_ema: bool = False,
scheduler_type: str = "ddim",
num_in_channels: int = None,
model_channels: int = None,
num_head_channels: int = None,
device: str = None,
from_safetensors: bool = False,
) -> AudioLDMPipeline:
"""
Load an AudioLDM pipeline object from a `.ckpt`/`.safetensors` file and (ideally) a `.yaml` config file.
Although many of the arguments can be automatically inferred, some of these rely on brittle checks against the
global step count, which will likely fail for models that have undergone further fine-tuning. Therefore, it is
recommended that you override the default values and/or supply an `original_config_file` wherever possible.
Args:
checkpoint_path (`str`): Path to `.ckpt` file.
original_config_file (`str`):
Path to `.yaml` config file corresponding to the original architecture. If `None`, will be automatically
set to the audioldm-s-full-v2 config.
image_size (`int`, *optional*, defaults to 512):
The image size that the model was trained on.
prediction_type (`str`, *optional*):
The prediction type that the model was trained on. If `None`, will be automatically
inferred by looking for a key in the config. For the default config, the prediction type is `'epsilon'`.
num_in_channels (`int`, *optional*, defaults to None):
The number of UNet input channels. If `None`, it will be automatically inferred from the config.
model_channels (`int`, *optional*, defaults to None):
The number of UNet model channels. If `None`, it will be automatically inferred from the config. Override
to 128 for the small checkpoints, 192 for the medium checkpoints and 256 for the large.
num_head_channels (`int`, *optional*, defaults to None):
The number of UNet head channels. If `None`, it will be automatically inferred from the config. Override
to 32 for the small and medium checkpoints, and 64 for the large.
scheduler_type (`str`, *optional*, defaults to 'pndm'):
Type of scheduler to use. Should be one of `["pndm", "lms", "heun", "euler", "euler-ancestral", "dpm",
"ddim"]`.
extract_ema (`bool`, *optional*, defaults to `False`): Only relevant for
checkpoints that have both EMA and non-EMA weights. Whether to extract the EMA weights or not. Defaults to
`False`. Pass `True` to extract the EMA weights. EMA weights usually yield higher quality images for
inference. Non-EMA weights are usually better to continue fine-tuning.
device (`str`, *optional*, defaults to `None`):
The device to use. Pass `None` to determine automatically.
from_safetensors (`str`, *optional*, defaults to `False`):
If `checkpoint_path` is in `safetensors` format, load checkpoint with safetensors instead of PyTorch.
return: An AudioLDMPipeline object representing the passed-in `.ckpt`/`.safetensors` file.
"""
if not is_omegaconf_available():
raise ValueError(BACKENDS_MAPPING["omegaconf"][1])
from omegaconf import OmegaConf
if from_safetensors:
if not is_safetensors_available():
raise ValueError(BACKENDS_MAPPING["safetensors"][1])
from safetensors import safe_open
checkpoint = {}
with safe_open(checkpoint_path, framework="pt", device="cpu") as f:
for key in f.keys():
checkpoint[key] = f.get_tensor(key)
else:
if device is None:
device = "cuda" if torch.cuda.is_available() else "cpu"
checkpoint = torch.load(checkpoint_path, map_location=device)
else:
checkpoint = torch.load(checkpoint_path, map_location=device)
if "state_dict" in checkpoint:
checkpoint = checkpoint["state_dict"]
if original_config_file is None:
original_config = DEFAULT_CONFIG
original_config = OmegaConf.create(original_config)
else:
original_config = OmegaConf.load(original_config_file)
if num_in_channels is not None:
original_config["model"]["params"]["unet_config"]["params"]["in_channels"] = num_in_channels
if model_channels is not None:
original_config["model"]["params"]["unet_config"]["params"]["model_channels"] = model_channels
if num_head_channels is not None:
original_config["model"]["params"]["unet_config"]["params"]["num_head_channels"] = num_head_channels
if (
"parameterization" in original_config["model"]["params"]
and original_config["model"]["params"]["parameterization"] == "v"
):
if prediction_type is None:
prediction_type = "v_prediction"
else:
if prediction_type is None:
prediction_type = "epsilon"
if image_size is None:
image_size = 512
num_train_timesteps = original_config.model.params.timesteps
beta_start = original_config.model.params.linear_start
beta_end = original_config.model.params.linear_end
scheduler = DDIMScheduler(
beta_end=beta_end,
beta_schedule="scaled_linear",
beta_start=beta_start,
num_train_timesteps=num_train_timesteps,
steps_offset=1,
clip_sample=False,
set_alpha_to_one=False,
prediction_type=prediction_type,
)
# make sure scheduler works correctly with DDIM
scheduler.register_to_config(clip_sample=False)
if scheduler_type == "pndm":
config = dict(scheduler.config)
config["skip_prk_steps"] = True
scheduler = PNDMScheduler.from_config(config)
elif scheduler_type == "lms":
scheduler = LMSDiscreteScheduler.from_config(scheduler.config)
elif scheduler_type == "heun":
scheduler = HeunDiscreteScheduler.from_config(scheduler.config)
elif scheduler_type == "euler":
scheduler = EulerDiscreteScheduler.from_config(scheduler.config)
elif scheduler_type == "euler-ancestral":
scheduler = EulerAncestralDiscreteScheduler.from_config(scheduler.config)
elif scheduler_type == "dpm":
scheduler = DPMSolverMultistepScheduler.from_config(scheduler.config)
elif scheduler_type == "ddim":
scheduler = scheduler
else:
raise ValueError(f"Scheduler of type {scheduler_type} doesn't exist!")
# Convert the UNet2DModel
unet_config = create_unet_diffusers_config(original_config, image_size=image_size)
unet = UNet2DConditionModel(**unet_config)
converted_unet_checkpoint = convert_ldm_unet_checkpoint(
checkpoint, unet_config, path=checkpoint_path, extract_ema=extract_ema
)
unet.load_state_dict(converted_unet_checkpoint)
# Convert the VAE model
vae_config = create_vae_diffusers_config(original_config, checkpoint=checkpoint, image_size=image_size)
converted_vae_checkpoint = convert_ldm_vae_checkpoint(checkpoint, vae_config)
vae = AutoencoderKL(**vae_config)
vae.load_state_dict(converted_vae_checkpoint)
# Convert the text model
# AudioLDM uses the same configuration and tokenizer as the original CLAP model
config = ClapTextConfig.from_pretrained("laion/clap-htsat-unfused")
tokenizer = AutoTokenizer.from_pretrained("laion/clap-htsat-unfused")
converted_text_model = convert_open_clap_checkpoint(checkpoint)
text_model = ClapTextModelWithProjection(config)
missing_keys, unexpected_keys = text_model.load_state_dict(converted_text_model, strict=False)
# we expect not to have token_type_ids in our original state dict so let's ignore them
missing_keys = list(set(missing_keys) - set(CLAP_EXPECTED_MISSING_KEYS))
if len(unexpected_keys) > 0:
raise ValueError(f"Unexpected keys when loading CLAP model: {unexpected_keys}")
if len(missing_keys) > 0:
raise ValueError(f"Missing keys when loading CLAP model: {missing_keys}")
# Convert the vocoder model
vocoder_config = create_transformers_vocoder_config(original_config)
vocoder_config = SpeechT5HifiGanConfig(**vocoder_config)
converted_vocoder_checkpoint = convert_hifigan_checkpoint(checkpoint, vocoder_config)
vocoder = SpeechT5HifiGan(vocoder_config)
vocoder.load_state_dict(converted_vocoder_checkpoint)
# Instantiate the diffusers pipeline
pipe = AudioLDMPipeline(
vae=vae,
text_encoder=text_model,
tokenizer=tokenizer,
unet=unet,
scheduler=scheduler,
vocoder=vocoder,
)
return pipe
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument(
"--checkpoint_path", default=None, type=str, required=True, help="Path to the checkpoint to convert."
)
parser.add_argument(
"--original_config_file",
default=None,
type=str,
help="The YAML config file corresponding to the original architecture.",
)
parser.add_argument(
"--num_in_channels",
default=None,
type=int,
help="The number of input channels. If `None` number of input channels will be automatically inferred.",
)
parser.add_argument(
"--model_channels",
default=None,
type=int,
help="The number of UNet model channels. If `None`, it will be automatically inferred from the config. Override"
" to 128 for the small checkpoints, 192 for the medium checkpoints and 256 for the large.",
)
parser.add_argument(
"--num_head_channels",
default=None,
type=int,
help="The number of UNet head channels. If `None`, it will be automatically inferred from the config. Override"
" to 32 for the small and medium checkpoints, and 64 for the large.",
)
parser.add_argument(
"--scheduler_type",
default="ddim",
type=str,
help="Type of scheduler to use. Should be one of ['pndm', 'lms', 'ddim', 'euler', 'euler-ancestral', 'dpm']",
)
parser.add_argument(
"--image_size",
default=None,
type=int,
help=("The image size that the model was trained on."),
)
parser.add_argument(
"--prediction_type",
default=None,
type=str,
help=("The prediction type that the model was trained on."),
)
parser.add_argument(
"--extract_ema",
action="store_true",
help=(
"Only relevant for checkpoints that have both EMA and non-EMA weights. Whether to extract the EMA weights"
" or not. Defaults to `False`. Add `--extract_ema` to extract the EMA weights. EMA weights usually yield"
" higher quality images for inference. Non-EMA weights are usually better to continue fine-tuning."
),
)
parser.add_argument(
"--from_safetensors",
action="store_true",
help="If `--checkpoint_path` is in `safetensors` format, load checkpoint with safetensors instead of PyTorch.",
)
parser.add_argument(
"--to_safetensors",
action="store_true",
help="Whether to store pipeline in safetensors format or not.",
)
parser.add_argument("--dump_path", default=None, type=str, required=True, help="Path to the output model.")
parser.add_argument("--device", type=str, help="Device to use (e.g. cpu, cuda:0, cuda:1, etc.)")
args = parser.parse_args()
pipe = load_pipeline_from_original_audioldm_ckpt(
checkpoint_path=args.checkpoint_path,
original_config_file=args.original_config_file,
image_size=args.image_size,
prediction_type=args.prediction_type,
extract_ema=args.extract_ema,
scheduler_type=args.scheduler_type,
num_in_channels=args.num_in_channels,
model_channels=args.model_channels,
num_head_channels=args.num_head_channels,
from_safetensors=args.from_safetensors,
device=args.device,
)
pipe.save_pretrained(args.dump_path, safe_serialization=args.to_safetensors)
| 0 |
hf_public_repos/diffusers | hf_public_repos/diffusers/scripts/convert_if.py | import argparse
import inspect
import os
import numpy as np
import torch
from torch.nn import functional as F
from transformers import CLIPConfig, CLIPImageProcessor, CLIPVisionModelWithProjection, T5EncoderModel, T5Tokenizer
from diffusers import DDPMScheduler, IFPipeline, IFSuperResolutionPipeline, UNet2DConditionModel
from diffusers.pipelines.deepfloyd_if.safety_checker import IFSafetyChecker
try:
from omegaconf import OmegaConf
except ImportError:
raise ImportError(
"OmegaConf is required to convert the IF checkpoints. Please install it with `pip install" " OmegaConf`."
)
def parse_args():
parser = argparse.ArgumentParser()
parser.add_argument("--dump_path", required=False, default=None, type=str)
parser.add_argument("--dump_path_stage_2", required=False, default=None, type=str)
parser.add_argument("--dump_path_stage_3", required=False, default=None, type=str)
parser.add_argument("--unet_config", required=False, default=None, type=str, help="Path to unet config file")
parser.add_argument(
"--unet_checkpoint_path", required=False, default=None, type=str, help="Path to unet checkpoint file"
)
parser.add_argument(
"--unet_checkpoint_path_stage_2",
required=False,
default=None,
type=str,
help="Path to stage 2 unet checkpoint file",
)
parser.add_argument(
"--unet_checkpoint_path_stage_3",
required=False,
default=None,
type=str,
help="Path to stage 3 unet checkpoint file",
)
parser.add_argument("--p_head_path", type=str, required=True)
parser.add_argument("--w_head_path", type=str, required=True)
args = parser.parse_args()
return args
def main(args):
tokenizer = T5Tokenizer.from_pretrained("google/t5-v1_1-xxl")
text_encoder = T5EncoderModel.from_pretrained("google/t5-v1_1-xxl")
feature_extractor = CLIPImageProcessor.from_pretrained("openai/clip-vit-large-patch14")
safety_checker = convert_safety_checker(p_head_path=args.p_head_path, w_head_path=args.w_head_path)
if args.unet_config is not None and args.unet_checkpoint_path is not None and args.dump_path is not None:
convert_stage_1_pipeline(tokenizer, text_encoder, feature_extractor, safety_checker, args)
if args.unet_checkpoint_path_stage_2 is not None and args.dump_path_stage_2 is not None:
convert_super_res_pipeline(tokenizer, text_encoder, feature_extractor, safety_checker, args, stage=2)
if args.unet_checkpoint_path_stage_3 is not None and args.dump_path_stage_3 is not None:
convert_super_res_pipeline(tokenizer, text_encoder, feature_extractor, safety_checker, args, stage=3)
def convert_stage_1_pipeline(tokenizer, text_encoder, feature_extractor, safety_checker, args):
unet = get_stage_1_unet(args.unet_config, args.unet_checkpoint_path)
scheduler = DDPMScheduler(
variance_type="learned_range",
beta_schedule="squaredcos_cap_v2",
prediction_type="epsilon",
thresholding=True,
dynamic_thresholding_ratio=0.95,
sample_max_value=1.5,
)
pipe = IFPipeline(
tokenizer=tokenizer,
text_encoder=text_encoder,
unet=unet,
scheduler=scheduler,
safety_checker=safety_checker,
feature_extractor=feature_extractor,
requires_safety_checker=True,
)
pipe.save_pretrained(args.dump_path)
def convert_super_res_pipeline(tokenizer, text_encoder, feature_extractor, safety_checker, args, stage):
if stage == 2:
unet_checkpoint_path = args.unet_checkpoint_path_stage_2
sample_size = None
dump_path = args.dump_path_stage_2
elif stage == 3:
unet_checkpoint_path = args.unet_checkpoint_path_stage_3
sample_size = 1024
dump_path = args.dump_path_stage_3
else:
assert False
unet = get_super_res_unet(unet_checkpoint_path, verify_param_count=False, sample_size=sample_size)
image_noising_scheduler = DDPMScheduler(
beta_schedule="squaredcos_cap_v2",
)
scheduler = DDPMScheduler(
variance_type="learned_range",
beta_schedule="squaredcos_cap_v2",
prediction_type="epsilon",
thresholding=True,
dynamic_thresholding_ratio=0.95,
sample_max_value=1.0,
)
pipe = IFSuperResolutionPipeline(
tokenizer=tokenizer,
text_encoder=text_encoder,
unet=unet,
scheduler=scheduler,
image_noising_scheduler=image_noising_scheduler,
safety_checker=safety_checker,
feature_extractor=feature_extractor,
requires_safety_checker=True,
)
pipe.save_pretrained(dump_path)
def get_stage_1_unet(unet_config, unet_checkpoint_path):
original_unet_config = OmegaConf.load(unet_config)
original_unet_config = original_unet_config.params
unet_diffusers_config = create_unet_diffusers_config(original_unet_config)
unet = UNet2DConditionModel(**unet_diffusers_config)
device = "cuda" if torch.cuda.is_available() else "cpu"
unet_checkpoint = torch.load(unet_checkpoint_path, map_location=device)
converted_unet_checkpoint = convert_ldm_unet_checkpoint(
unet_checkpoint, unet_diffusers_config, path=unet_checkpoint_path
)
unet.load_state_dict(converted_unet_checkpoint)
return unet
def convert_safety_checker(p_head_path, w_head_path):
state_dict = {}
# p head
p_head = np.load(p_head_path)
p_head_weights = p_head["weights"]
p_head_weights = torch.from_numpy(p_head_weights)
p_head_weights = p_head_weights.unsqueeze(0)
p_head_biases = p_head["biases"]
p_head_biases = torch.from_numpy(p_head_biases)
p_head_biases = p_head_biases.unsqueeze(0)
state_dict["p_head.weight"] = p_head_weights
state_dict["p_head.bias"] = p_head_biases
# w head
w_head = np.load(w_head_path)
w_head_weights = w_head["weights"]
w_head_weights = torch.from_numpy(w_head_weights)
w_head_weights = w_head_weights.unsqueeze(0)
w_head_biases = w_head["biases"]
w_head_biases = torch.from_numpy(w_head_biases)
w_head_biases = w_head_biases.unsqueeze(0)
state_dict["w_head.weight"] = w_head_weights
state_dict["w_head.bias"] = w_head_biases
# vision model
vision_model = CLIPVisionModelWithProjection.from_pretrained("openai/clip-vit-large-patch14")
vision_model_state_dict = vision_model.state_dict()
for key, value in vision_model_state_dict.items():
key = f"vision_model.{key}"
state_dict[key] = value
# full model
config = CLIPConfig.from_pretrained("openai/clip-vit-large-patch14")
safety_checker = IFSafetyChecker(config)
safety_checker.load_state_dict(state_dict)
return safety_checker
def create_unet_diffusers_config(original_unet_config, class_embed_type=None):
attention_resolutions = parse_list(original_unet_config.attention_resolutions)
attention_resolutions = [original_unet_config.image_size // int(res) for res in attention_resolutions]
channel_mult = parse_list(original_unet_config.channel_mult)
block_out_channels = [original_unet_config.model_channels * mult for mult in channel_mult]
down_block_types = []
resolution = 1
for i in range(len(block_out_channels)):
if resolution in attention_resolutions:
block_type = "SimpleCrossAttnDownBlock2D"
elif original_unet_config.resblock_updown:
block_type = "ResnetDownsampleBlock2D"
else:
block_type = "DownBlock2D"
down_block_types.append(block_type)
if i != len(block_out_channels) - 1:
resolution *= 2
up_block_types = []
for i in range(len(block_out_channels)):
if resolution in attention_resolutions:
block_type = "SimpleCrossAttnUpBlock2D"
elif original_unet_config.resblock_updown:
block_type = "ResnetUpsampleBlock2D"
else:
block_type = "UpBlock2D"
up_block_types.append(block_type)
resolution //= 2
head_dim = original_unet_config.num_head_channels
use_linear_projection = (
original_unet_config.use_linear_in_transformer
if "use_linear_in_transformer" in original_unet_config
else False
)
if use_linear_projection:
# stable diffusion 2-base-512 and 2-768
if head_dim is None:
head_dim = [5, 10, 20, 20]
projection_class_embeddings_input_dim = None
if class_embed_type is None:
if "num_classes" in original_unet_config:
if original_unet_config.num_classes == "sequential":
class_embed_type = "projection"
assert "adm_in_channels" in original_unet_config
projection_class_embeddings_input_dim = original_unet_config.adm_in_channels
else:
raise NotImplementedError(
f"Unknown conditional unet num_classes config: {original_unet_config.num_classes}"
)
config = {
"sample_size": original_unet_config.image_size,
"in_channels": original_unet_config.in_channels,
"down_block_types": tuple(down_block_types),
"block_out_channels": tuple(block_out_channels),
"layers_per_block": original_unet_config.num_res_blocks,
"cross_attention_dim": original_unet_config.encoder_channels,
"attention_head_dim": head_dim,
"use_linear_projection": use_linear_projection,
"class_embed_type": class_embed_type,
"projection_class_embeddings_input_dim": projection_class_embeddings_input_dim,
"out_channels": original_unet_config.out_channels,
"up_block_types": tuple(up_block_types),
"upcast_attention": False, # TODO: guessing
"cross_attention_norm": "group_norm",
"mid_block_type": "UNetMidBlock2DSimpleCrossAttn",
"addition_embed_type": "text",
"act_fn": "gelu",
}
if original_unet_config.use_scale_shift_norm:
config["resnet_time_scale_shift"] = "scale_shift"
if "encoder_dim" in original_unet_config:
config["encoder_hid_dim"] = original_unet_config.encoder_dim
return config
def convert_ldm_unet_checkpoint(unet_state_dict, config, path=None):
"""
Takes a state dict and a config, and returns a converted checkpoint.
"""
new_checkpoint = {}
new_checkpoint["time_embedding.linear_1.weight"] = unet_state_dict["time_embed.0.weight"]
new_checkpoint["time_embedding.linear_1.bias"] = unet_state_dict["time_embed.0.bias"]
new_checkpoint["time_embedding.linear_2.weight"] = unet_state_dict["time_embed.2.weight"]
new_checkpoint["time_embedding.linear_2.bias"] = unet_state_dict["time_embed.2.bias"]
if config["class_embed_type"] in [None, "identity"]:
# No parameters to port
...
elif config["class_embed_type"] == "timestep" or config["class_embed_type"] == "projection":
new_checkpoint["class_embedding.linear_1.weight"] = unet_state_dict["label_emb.0.0.weight"]
new_checkpoint["class_embedding.linear_1.bias"] = unet_state_dict["label_emb.0.0.bias"]
new_checkpoint["class_embedding.linear_2.weight"] = unet_state_dict["label_emb.0.2.weight"]
new_checkpoint["class_embedding.linear_2.bias"] = unet_state_dict["label_emb.0.2.bias"]
else:
raise NotImplementedError(f"Not implemented `class_embed_type`: {config['class_embed_type']}")
new_checkpoint["conv_in.weight"] = unet_state_dict["input_blocks.0.0.weight"]
new_checkpoint["conv_in.bias"] = unet_state_dict["input_blocks.0.0.bias"]
new_checkpoint["conv_norm_out.weight"] = unet_state_dict["out.0.weight"]
new_checkpoint["conv_norm_out.bias"] = unet_state_dict["out.0.bias"]
new_checkpoint["conv_out.weight"] = unet_state_dict["out.2.weight"]
new_checkpoint["conv_out.bias"] = unet_state_dict["out.2.bias"]
# Retrieves the keys for the input blocks only
num_input_blocks = len({".".join(layer.split(".")[:2]) for layer in unet_state_dict if "input_blocks" in layer})
input_blocks = {
layer_id: [key for key in unet_state_dict if f"input_blocks.{layer_id}." in key]
for layer_id in range(num_input_blocks)
}
# Retrieves the keys for the middle blocks only
num_middle_blocks = len({".".join(layer.split(".")[:2]) for layer in unet_state_dict if "middle_block" in layer})
middle_blocks = {
layer_id: [key for key in unet_state_dict if f"middle_block.{layer_id}" in key]
for layer_id in range(num_middle_blocks)
}
# Retrieves the keys for the output blocks only
num_output_blocks = len({".".join(layer.split(".")[:2]) for layer in unet_state_dict if "output_blocks" in layer})
output_blocks = {
layer_id: [key for key in unet_state_dict if f"output_blocks.{layer_id}." in key]
for layer_id in range(num_output_blocks)
}
for i in range(1, num_input_blocks):
block_id = (i - 1) // (config["layers_per_block"] + 1)
layer_in_block_id = (i - 1) % (config["layers_per_block"] + 1)
resnets = [
key for key in input_blocks[i] if f"input_blocks.{i}.0" in key and f"input_blocks.{i}.0.op" not in key
]
attentions = [key for key in input_blocks[i] if f"input_blocks.{i}.1" in key]
if f"input_blocks.{i}.0.op.weight" in unet_state_dict:
new_checkpoint[f"down_blocks.{block_id}.downsamplers.0.conv.weight"] = unet_state_dict.pop(
f"input_blocks.{i}.0.op.weight"
)
new_checkpoint[f"down_blocks.{block_id}.downsamplers.0.conv.bias"] = unet_state_dict.pop(
f"input_blocks.{i}.0.op.bias"
)
paths = renew_resnet_paths(resnets)
# TODO need better check than i in [4, 8, 12, 16]
block_type = config["down_block_types"][block_id]
if (block_type == "ResnetDownsampleBlock2D" or block_type == "SimpleCrossAttnDownBlock2D") and i in [
4,
8,
12,
16,
]:
meta_path = {"old": f"input_blocks.{i}.0", "new": f"down_blocks.{block_id}.downsamplers.0"}
else:
meta_path = {"old": f"input_blocks.{i}.0", "new": f"down_blocks.{block_id}.resnets.{layer_in_block_id}"}
assign_to_checkpoint(
paths, new_checkpoint, unet_state_dict, additional_replacements=[meta_path], config=config
)
if len(attentions):
old_path = f"input_blocks.{i}.1"
new_path = f"down_blocks.{block_id}.attentions.{layer_in_block_id}"
assign_attention_to_checkpoint(
new_checkpoint=new_checkpoint,
unet_state_dict=unet_state_dict,
old_path=old_path,
new_path=new_path,
config=config,
)
paths = renew_attention_paths(attentions)
meta_path = {"old": old_path, "new": new_path}
assign_to_checkpoint(
paths,
new_checkpoint,
unet_state_dict,
additional_replacements=[meta_path],
config=config,
)
resnet_0 = middle_blocks[0]
attentions = middle_blocks[1]
resnet_1 = middle_blocks[2]
resnet_0_paths = renew_resnet_paths(resnet_0)
assign_to_checkpoint(resnet_0_paths, new_checkpoint, unet_state_dict, config=config)
resnet_1_paths = renew_resnet_paths(resnet_1)
assign_to_checkpoint(resnet_1_paths, new_checkpoint, unet_state_dict, config=config)
old_path = "middle_block.1"
new_path = "mid_block.attentions.0"
assign_attention_to_checkpoint(
new_checkpoint=new_checkpoint,
unet_state_dict=unet_state_dict,
old_path=old_path,
new_path=new_path,
config=config,
)
attentions_paths = renew_attention_paths(attentions)
meta_path = {"old": "middle_block.1", "new": "mid_block.attentions.0"}
assign_to_checkpoint(
attentions_paths, new_checkpoint, unet_state_dict, additional_replacements=[meta_path], config=config
)
for i in range(num_output_blocks):
block_id = i // (config["layers_per_block"] + 1)
layer_in_block_id = i % (config["layers_per_block"] + 1)
output_block_layers = [shave_segments(name, 2) for name in output_blocks[i]]
output_block_list = {}
for layer in output_block_layers:
layer_id, layer_name = layer.split(".")[0], shave_segments(layer, 1)
if layer_id in output_block_list:
output_block_list[layer_id].append(layer_name)
else:
output_block_list[layer_id] = [layer_name]
# len(output_block_list) == 1 -> resnet
# len(output_block_list) == 2 -> resnet, attention
# len(output_block_list) == 3 -> resnet, attention, upscale resnet
if len(output_block_list) > 1:
resnets = [key for key in output_blocks[i] if f"output_blocks.{i}.0" in key]
attentions = [key for key in output_blocks[i] if f"output_blocks.{i}.1" in key]
paths = renew_resnet_paths(resnets)
meta_path = {"old": f"output_blocks.{i}.0", "new": f"up_blocks.{block_id}.resnets.{layer_in_block_id}"}
assign_to_checkpoint(
paths, new_checkpoint, unet_state_dict, additional_replacements=[meta_path], config=config
)
output_block_list = {k: sorted(v) for k, v in output_block_list.items()}
if ["conv.bias", "conv.weight"] in output_block_list.values():
index = list(output_block_list.values()).index(["conv.bias", "conv.weight"])
new_checkpoint[f"up_blocks.{block_id}.upsamplers.0.conv.weight"] = unet_state_dict[
f"output_blocks.{i}.{index}.conv.weight"
]
new_checkpoint[f"up_blocks.{block_id}.upsamplers.0.conv.bias"] = unet_state_dict[
f"output_blocks.{i}.{index}.conv.bias"
]
# Clear attentions as they have been attributed above.
if len(attentions) == 2:
attentions = []
if len(attentions):
old_path = f"output_blocks.{i}.1"
new_path = f"up_blocks.{block_id}.attentions.{layer_in_block_id}"
assign_attention_to_checkpoint(
new_checkpoint=new_checkpoint,
unet_state_dict=unet_state_dict,
old_path=old_path,
new_path=new_path,
config=config,
)
paths = renew_attention_paths(attentions)
meta_path = {
"old": old_path,
"new": new_path,
}
assign_to_checkpoint(
paths, new_checkpoint, unet_state_dict, additional_replacements=[meta_path], config=config
)
if len(output_block_list) == 3:
resnets = [key for key in output_blocks[i] if f"output_blocks.{i}.2" in key]
paths = renew_resnet_paths(resnets)
meta_path = {"old": f"output_blocks.{i}.2", "new": f"up_blocks.{block_id}.upsamplers.0"}
assign_to_checkpoint(
paths, new_checkpoint, unet_state_dict, additional_replacements=[meta_path], config=config
)
else:
resnet_0_paths = renew_resnet_paths(output_block_layers, n_shave_prefix_segments=1)
for path in resnet_0_paths:
old_path = ".".join(["output_blocks", str(i), path["old"]])
new_path = ".".join(["up_blocks", str(block_id), "resnets", str(layer_in_block_id), path["new"]])
new_checkpoint[new_path] = unet_state_dict[old_path]
if "encoder_proj.weight" in unet_state_dict:
new_checkpoint["encoder_hid_proj.weight"] = unet_state_dict.pop("encoder_proj.weight")
new_checkpoint["encoder_hid_proj.bias"] = unet_state_dict.pop("encoder_proj.bias")
if "encoder_pooling.0.weight" in unet_state_dict:
new_checkpoint["add_embedding.norm1.weight"] = unet_state_dict.pop("encoder_pooling.0.weight")
new_checkpoint["add_embedding.norm1.bias"] = unet_state_dict.pop("encoder_pooling.0.bias")
new_checkpoint["add_embedding.pool.positional_embedding"] = unet_state_dict.pop(
"encoder_pooling.1.positional_embedding"
)
new_checkpoint["add_embedding.pool.k_proj.weight"] = unet_state_dict.pop("encoder_pooling.1.k_proj.weight")
new_checkpoint["add_embedding.pool.k_proj.bias"] = unet_state_dict.pop("encoder_pooling.1.k_proj.bias")
new_checkpoint["add_embedding.pool.q_proj.weight"] = unet_state_dict.pop("encoder_pooling.1.q_proj.weight")
new_checkpoint["add_embedding.pool.q_proj.bias"] = unet_state_dict.pop("encoder_pooling.1.q_proj.bias")
new_checkpoint["add_embedding.pool.v_proj.weight"] = unet_state_dict.pop("encoder_pooling.1.v_proj.weight")
new_checkpoint["add_embedding.pool.v_proj.bias"] = unet_state_dict.pop("encoder_pooling.1.v_proj.bias")
new_checkpoint["add_embedding.proj.weight"] = unet_state_dict.pop("encoder_pooling.2.weight")
new_checkpoint["add_embedding.proj.bias"] = unet_state_dict.pop("encoder_pooling.2.bias")
new_checkpoint["add_embedding.norm2.weight"] = unet_state_dict.pop("encoder_pooling.3.weight")
new_checkpoint["add_embedding.norm2.bias"] = unet_state_dict.pop("encoder_pooling.3.bias")
return new_checkpoint
def shave_segments(path, n_shave_prefix_segments=1):
"""
Removes segments. Positive values shave the first segments, negative shave the last segments.
"""
if n_shave_prefix_segments >= 0:
return ".".join(path.split(".")[n_shave_prefix_segments:])
else:
return ".".join(path.split(".")[:n_shave_prefix_segments])
def renew_resnet_paths(old_list, n_shave_prefix_segments=0):
"""
Updates paths inside resnets to the new naming scheme (local renaming)
"""
mapping = []
for old_item in old_list:
new_item = old_item.replace("in_layers.0", "norm1")
new_item = new_item.replace("in_layers.2", "conv1")
new_item = new_item.replace("out_layers.0", "norm2")
new_item = new_item.replace("out_layers.3", "conv2")
new_item = new_item.replace("emb_layers.1", "time_emb_proj")
new_item = new_item.replace("skip_connection", "conv_shortcut")
new_item = shave_segments(new_item, n_shave_prefix_segments=n_shave_prefix_segments)
mapping.append({"old": old_item, "new": new_item})
return mapping
def renew_attention_paths(old_list, n_shave_prefix_segments=0):
"""
Updates paths inside attentions to the new naming scheme (local renaming)
"""
mapping = []
for old_item in old_list:
new_item = old_item
if "qkv" in new_item:
continue
if "encoder_kv" in new_item:
continue
new_item = new_item.replace("norm.weight", "group_norm.weight")
new_item = new_item.replace("norm.bias", "group_norm.bias")
new_item = new_item.replace("proj_out.weight", "to_out.0.weight")
new_item = new_item.replace("proj_out.bias", "to_out.0.bias")
new_item = new_item.replace("norm_encoder.weight", "norm_cross.weight")
new_item = new_item.replace("norm_encoder.bias", "norm_cross.bias")
new_item = shave_segments(new_item, n_shave_prefix_segments=n_shave_prefix_segments)
mapping.append({"old": old_item, "new": new_item})
return mapping
def assign_attention_to_checkpoint(new_checkpoint, unet_state_dict, old_path, new_path, config):
qkv_weight = unet_state_dict.pop(f"{old_path}.qkv.weight")
qkv_weight = qkv_weight[:, :, 0]
qkv_bias = unet_state_dict.pop(f"{old_path}.qkv.bias")
is_cross_attn_only = "only_cross_attention" in config and config["only_cross_attention"]
split = 1 if is_cross_attn_only else 3
weights, bias = split_attentions(
weight=qkv_weight,
bias=qkv_bias,
split=split,
chunk_size=config["attention_head_dim"],
)
if is_cross_attn_only:
query_weight, q_bias = weights, bias
new_checkpoint[f"{new_path}.to_q.weight"] = query_weight[0]
new_checkpoint[f"{new_path}.to_q.bias"] = q_bias[0]
else:
[query_weight, key_weight, value_weight], [q_bias, k_bias, v_bias] = weights, bias
new_checkpoint[f"{new_path}.to_q.weight"] = query_weight
new_checkpoint[f"{new_path}.to_q.bias"] = q_bias
new_checkpoint[f"{new_path}.to_k.weight"] = key_weight
new_checkpoint[f"{new_path}.to_k.bias"] = k_bias
new_checkpoint[f"{new_path}.to_v.weight"] = value_weight
new_checkpoint[f"{new_path}.to_v.bias"] = v_bias
encoder_kv_weight = unet_state_dict.pop(f"{old_path}.encoder_kv.weight")
encoder_kv_weight = encoder_kv_weight[:, :, 0]
encoder_kv_bias = unet_state_dict.pop(f"{old_path}.encoder_kv.bias")
[encoder_k_weight, encoder_v_weight], [encoder_k_bias, encoder_v_bias] = split_attentions(
weight=encoder_kv_weight,
bias=encoder_kv_bias,
split=2,
chunk_size=config["attention_head_dim"],
)
new_checkpoint[f"{new_path}.add_k_proj.weight"] = encoder_k_weight
new_checkpoint[f"{new_path}.add_k_proj.bias"] = encoder_k_bias
new_checkpoint[f"{new_path}.add_v_proj.weight"] = encoder_v_weight
new_checkpoint[f"{new_path}.add_v_proj.bias"] = encoder_v_bias
def assign_to_checkpoint(paths, checkpoint, old_checkpoint, additional_replacements=None, config=None):
"""
This does the final conversion step: take locally converted weights and apply a global renaming to them. It splits
attention layers, and takes into account additional replacements that may arise.
Assigns the weights to the new checkpoint.
"""
assert isinstance(paths, list), "Paths should be a list of dicts containing 'old' and 'new' keys."
for path in paths:
new_path = path["new"]
# Global renaming happens here
new_path = new_path.replace("middle_block.0", "mid_block.resnets.0")
new_path = new_path.replace("middle_block.1", "mid_block.attentions.0")
new_path = new_path.replace("middle_block.2", "mid_block.resnets.1")
if additional_replacements is not None:
for replacement in additional_replacements:
new_path = new_path.replace(replacement["old"], replacement["new"])
# proj_attn.weight has to be converted from conv 1D to linear
if "proj_attn.weight" in new_path or "to_out.0.weight" in new_path:
checkpoint[new_path] = old_checkpoint[path["old"]][:, :, 0]
else:
checkpoint[new_path] = old_checkpoint[path["old"]]
# TODO maybe document and/or can do more efficiently (build indices in for loop and extract once for each split?)
def split_attentions(*, weight, bias, split, chunk_size):
weights = [None] * split
biases = [None] * split
weights_biases_idx = 0
for starting_row_index in range(0, weight.shape[0], chunk_size):
row_indices = torch.arange(starting_row_index, starting_row_index + chunk_size)
weight_rows = weight[row_indices, :]
bias_rows = bias[row_indices]
if weights[weights_biases_idx] is None:
weights[weights_biases_idx] = weight_rows
biases[weights_biases_idx] = bias_rows
else:
assert weights[weights_biases_idx] is not None
weights[weights_biases_idx] = torch.concat([weights[weights_biases_idx], weight_rows])
biases[weights_biases_idx] = torch.concat([biases[weights_biases_idx], bias_rows])
weights_biases_idx = (weights_biases_idx + 1) % split
return weights, biases
def parse_list(value):
if isinstance(value, str):
value = value.split(",")
value = [int(v) for v in value]
elif isinstance(value, list):
pass
else:
raise ValueError(f"Can't parse list for type: {type(value)}")
return value
# below is copy and pasted from original convert_if_stage_2.py script
def get_super_res_unet(unet_checkpoint_path, verify_param_count=True, sample_size=None):
orig_path = unet_checkpoint_path
original_unet_config = OmegaConf.load(os.path.join(orig_path, "config.yml"))
original_unet_config = original_unet_config.params
unet_diffusers_config = superres_create_unet_diffusers_config(original_unet_config)
unet_diffusers_config["time_embedding_dim"] = original_unet_config.model_channels * int(
original_unet_config.channel_mult.split(",")[-1]
)
if original_unet_config.encoder_dim != original_unet_config.encoder_channels:
unet_diffusers_config["encoder_hid_dim"] = original_unet_config.encoder_dim
unet_diffusers_config["class_embed_type"] = "timestep"
unet_diffusers_config["addition_embed_type"] = "text"
unet_diffusers_config["time_embedding_act_fn"] = "gelu"
unet_diffusers_config["resnet_skip_time_act"] = True
unet_diffusers_config["resnet_out_scale_factor"] = 1 / 0.7071
unet_diffusers_config["mid_block_scale_factor"] = 1 / 0.7071
unet_diffusers_config["only_cross_attention"] = (
bool(original_unet_config.disable_self_attentions)
if (
"disable_self_attentions" in original_unet_config
and isinstance(original_unet_config.disable_self_attentions, int)
)
else True
)
if sample_size is None:
unet_diffusers_config["sample_size"] = original_unet_config.image_size
else:
# The second upscaler unet's sample size is incorrectly specified
# in the config and is instead hardcoded in source
unet_diffusers_config["sample_size"] = sample_size
unet_checkpoint = torch.load(os.path.join(unet_checkpoint_path, "pytorch_model.bin"), map_location="cpu")
if verify_param_count:
# check that architecture matches - is a bit slow
verify_param_count(orig_path, unet_diffusers_config)
converted_unet_checkpoint = superres_convert_ldm_unet_checkpoint(
unet_checkpoint, unet_diffusers_config, path=unet_checkpoint_path
)
converted_keys = converted_unet_checkpoint.keys()
model = UNet2DConditionModel(**unet_diffusers_config)
expected_weights = model.state_dict().keys()
diff_c_e = set(converted_keys) - set(expected_weights)
diff_e_c = set(expected_weights) - set(converted_keys)
assert len(diff_e_c) == 0, f"Expected, but not converted: {diff_e_c}"
assert len(diff_c_e) == 0, f"Converted, but not expected: {diff_c_e}"
model.load_state_dict(converted_unet_checkpoint)
return model
def superres_create_unet_diffusers_config(original_unet_config):
attention_resolutions = parse_list(original_unet_config.attention_resolutions)
attention_resolutions = [original_unet_config.image_size // int(res) for res in attention_resolutions]
channel_mult = parse_list(original_unet_config.channel_mult)
block_out_channels = [original_unet_config.model_channels * mult for mult in channel_mult]
down_block_types = []
resolution = 1
for i in range(len(block_out_channels)):
if resolution in attention_resolutions:
block_type = "SimpleCrossAttnDownBlock2D"
elif original_unet_config.resblock_updown:
block_type = "ResnetDownsampleBlock2D"
else:
block_type = "DownBlock2D"
down_block_types.append(block_type)
if i != len(block_out_channels) - 1:
resolution *= 2
up_block_types = []
for i in range(len(block_out_channels)):
if resolution in attention_resolutions:
block_type = "SimpleCrossAttnUpBlock2D"
elif original_unet_config.resblock_updown:
block_type = "ResnetUpsampleBlock2D"
else:
block_type = "UpBlock2D"
up_block_types.append(block_type)
resolution //= 2
head_dim = original_unet_config.num_head_channels
use_linear_projection = (
original_unet_config.use_linear_in_transformer
if "use_linear_in_transformer" in original_unet_config
else False
)
if use_linear_projection:
# stable diffusion 2-base-512 and 2-768
if head_dim is None:
head_dim = [5, 10, 20, 20]
class_embed_type = None
projection_class_embeddings_input_dim = None
if "num_classes" in original_unet_config:
if original_unet_config.num_classes == "sequential":
class_embed_type = "projection"
assert "adm_in_channels" in original_unet_config
projection_class_embeddings_input_dim = original_unet_config.adm_in_channels
else:
raise NotImplementedError(
f"Unknown conditional unet num_classes config: {original_unet_config.num_classes}"
)
config = {
"in_channels": original_unet_config.in_channels,
"down_block_types": tuple(down_block_types),
"block_out_channels": tuple(block_out_channels),
"layers_per_block": tuple(original_unet_config.num_res_blocks),
"cross_attention_dim": original_unet_config.encoder_channels,
"attention_head_dim": head_dim,
"use_linear_projection": use_linear_projection,
"class_embed_type": class_embed_type,
"projection_class_embeddings_input_dim": projection_class_embeddings_input_dim,
"out_channels": original_unet_config.out_channels,
"up_block_types": tuple(up_block_types),
"upcast_attention": False, # TODO: guessing
"cross_attention_norm": "group_norm",
"mid_block_type": "UNetMidBlock2DSimpleCrossAttn",
"act_fn": "gelu",
}
if original_unet_config.use_scale_shift_norm:
config["resnet_time_scale_shift"] = "scale_shift"
return config
def superres_convert_ldm_unet_checkpoint(unet_state_dict, config, path=None, extract_ema=False):
"""
Takes a state dict and a config, and returns a converted checkpoint.
"""
new_checkpoint = {}
new_checkpoint["time_embedding.linear_1.weight"] = unet_state_dict["time_embed.0.weight"]
new_checkpoint["time_embedding.linear_1.bias"] = unet_state_dict["time_embed.0.bias"]
new_checkpoint["time_embedding.linear_2.weight"] = unet_state_dict["time_embed.2.weight"]
new_checkpoint["time_embedding.linear_2.bias"] = unet_state_dict["time_embed.2.bias"]
if config["class_embed_type"] is None:
# No parameters to port
...
elif config["class_embed_type"] == "timestep" or config["class_embed_type"] == "projection":
new_checkpoint["class_embedding.linear_1.weight"] = unet_state_dict["aug_proj.0.weight"]
new_checkpoint["class_embedding.linear_1.bias"] = unet_state_dict["aug_proj.0.bias"]
new_checkpoint["class_embedding.linear_2.weight"] = unet_state_dict["aug_proj.2.weight"]
new_checkpoint["class_embedding.linear_2.bias"] = unet_state_dict["aug_proj.2.bias"]
else:
raise NotImplementedError(f"Not implemented `class_embed_type`: {config['class_embed_type']}")
if "encoder_proj.weight" in unet_state_dict:
new_checkpoint["encoder_hid_proj.weight"] = unet_state_dict["encoder_proj.weight"]
new_checkpoint["encoder_hid_proj.bias"] = unet_state_dict["encoder_proj.bias"]
if "encoder_pooling.0.weight" in unet_state_dict:
mapping = {
"encoder_pooling.0": "add_embedding.norm1",
"encoder_pooling.1": "add_embedding.pool",
"encoder_pooling.2": "add_embedding.proj",
"encoder_pooling.3": "add_embedding.norm2",
}
for key in unet_state_dict.keys():
if key.startswith("encoder_pooling"):
prefix = key[: len("encoder_pooling.0")]
new_key = key.replace(prefix, mapping[prefix])
new_checkpoint[new_key] = unet_state_dict[key]
new_checkpoint["conv_in.weight"] = unet_state_dict["input_blocks.0.0.weight"]
new_checkpoint["conv_in.bias"] = unet_state_dict["input_blocks.0.0.bias"]
new_checkpoint["conv_norm_out.weight"] = unet_state_dict["out.0.weight"]
new_checkpoint["conv_norm_out.bias"] = unet_state_dict["out.0.bias"]
new_checkpoint["conv_out.weight"] = unet_state_dict["out.2.weight"]
new_checkpoint["conv_out.bias"] = unet_state_dict["out.2.bias"]
# Retrieves the keys for the input blocks only
num_input_blocks = len({".".join(layer.split(".")[:2]) for layer in unet_state_dict if "input_blocks" in layer})
input_blocks = {
layer_id: [key for key in unet_state_dict if f"input_blocks.{layer_id}." in key]
for layer_id in range(num_input_blocks)
}
# Retrieves the keys for the middle blocks only
num_middle_blocks = len({".".join(layer.split(".")[:2]) for layer in unet_state_dict if "middle_block" in layer})
middle_blocks = {
layer_id: [key for key in unet_state_dict if f"middle_block.{layer_id}" in key]
for layer_id in range(num_middle_blocks)
}
# Retrieves the keys for the output blocks only
num_output_blocks = len({".".join(layer.split(".")[:2]) for layer in unet_state_dict if "output_blocks" in layer})
output_blocks = {
layer_id: [key for key in unet_state_dict if f"output_blocks.{layer_id}." in key]
for layer_id in range(num_output_blocks)
}
if not isinstance(config["layers_per_block"], int):
layers_per_block_list = [e + 1 for e in config["layers_per_block"]]
layers_per_block_cumsum = list(np.cumsum(layers_per_block_list))
downsampler_ids = layers_per_block_cumsum
else:
# TODO need better check than i in [4, 8, 12, 16]
downsampler_ids = [4, 8, 12, 16]
for i in range(1, num_input_blocks):
if isinstance(config["layers_per_block"], int):
layers_per_block = config["layers_per_block"]
block_id = (i - 1) // (layers_per_block + 1)
layer_in_block_id = (i - 1) % (layers_per_block + 1)
else:
block_id = next(k for k, n in enumerate(layers_per_block_cumsum) if (i - 1) < n)
passed_blocks = layers_per_block_cumsum[block_id - 1] if block_id > 0 else 0
layer_in_block_id = (i - 1) - passed_blocks
resnets = [
key for key in input_blocks[i] if f"input_blocks.{i}.0" in key and f"input_blocks.{i}.0.op" not in key
]
attentions = [key for key in input_blocks[i] if f"input_blocks.{i}.1" in key]
if f"input_blocks.{i}.0.op.weight" in unet_state_dict:
new_checkpoint[f"down_blocks.{block_id}.downsamplers.0.conv.weight"] = unet_state_dict.pop(
f"input_blocks.{i}.0.op.weight"
)
new_checkpoint[f"down_blocks.{block_id}.downsamplers.0.conv.bias"] = unet_state_dict.pop(
f"input_blocks.{i}.0.op.bias"
)
paths = renew_resnet_paths(resnets)
block_type = config["down_block_types"][block_id]
if (
block_type == "ResnetDownsampleBlock2D" or block_type == "SimpleCrossAttnDownBlock2D"
) and i in downsampler_ids:
meta_path = {"old": f"input_blocks.{i}.0", "new": f"down_blocks.{block_id}.downsamplers.0"}
else:
meta_path = {"old": f"input_blocks.{i}.0", "new": f"down_blocks.{block_id}.resnets.{layer_in_block_id}"}
assign_to_checkpoint(
paths, new_checkpoint, unet_state_dict, additional_replacements=[meta_path], config=config
)
if len(attentions):
old_path = f"input_blocks.{i}.1"
new_path = f"down_blocks.{block_id}.attentions.{layer_in_block_id}"
assign_attention_to_checkpoint(
new_checkpoint=new_checkpoint,
unet_state_dict=unet_state_dict,
old_path=old_path,
new_path=new_path,
config=config,
)
paths = renew_attention_paths(attentions)
meta_path = {"old": old_path, "new": new_path}
assign_to_checkpoint(
paths,
new_checkpoint,
unet_state_dict,
additional_replacements=[meta_path],
config=config,
)
resnet_0 = middle_blocks[0]
attentions = middle_blocks[1]
resnet_1 = middle_blocks[2]
resnet_0_paths = renew_resnet_paths(resnet_0)
assign_to_checkpoint(resnet_0_paths, new_checkpoint, unet_state_dict, config=config)
resnet_1_paths = renew_resnet_paths(resnet_1)
assign_to_checkpoint(resnet_1_paths, new_checkpoint, unet_state_dict, config=config)
old_path = "middle_block.1"
new_path = "mid_block.attentions.0"
assign_attention_to_checkpoint(
new_checkpoint=new_checkpoint,
unet_state_dict=unet_state_dict,
old_path=old_path,
new_path=new_path,
config=config,
)
attentions_paths = renew_attention_paths(attentions)
meta_path = {"old": "middle_block.1", "new": "mid_block.attentions.0"}
assign_to_checkpoint(
attentions_paths, new_checkpoint, unet_state_dict, additional_replacements=[meta_path], config=config
)
if not isinstance(config["layers_per_block"], int):
layers_per_block_list = list(reversed([e + 1 for e in config["layers_per_block"]]))
layers_per_block_cumsum = list(np.cumsum(layers_per_block_list))
for i in range(num_output_blocks):
if isinstance(config["layers_per_block"], int):
layers_per_block = config["layers_per_block"]
block_id = i // (layers_per_block + 1)
layer_in_block_id = i % (layers_per_block + 1)
else:
block_id = next(k for k, n in enumerate(layers_per_block_cumsum) if i < n)
passed_blocks = layers_per_block_cumsum[block_id - 1] if block_id > 0 else 0
layer_in_block_id = i - passed_blocks
output_block_layers = [shave_segments(name, 2) for name in output_blocks[i]]
output_block_list = {}
for layer in output_block_layers:
layer_id, layer_name = layer.split(".")[0], shave_segments(layer, 1)
if layer_id in output_block_list:
output_block_list[layer_id].append(layer_name)
else:
output_block_list[layer_id] = [layer_name]
# len(output_block_list) == 1 -> resnet
# len(output_block_list) == 2 -> resnet, attention or resnet, upscale resnet
# len(output_block_list) == 3 -> resnet, attention, upscale resnet
if len(output_block_list) > 1:
resnets = [key for key in output_blocks[i] if f"output_blocks.{i}.0" in key]
has_attention = True
if len(output_block_list) == 2 and any("in_layers" in k for k in output_block_list["1"]):
has_attention = False
maybe_attentions = [key for key in output_blocks[i] if f"output_blocks.{i}.1" in key]
paths = renew_resnet_paths(resnets)
meta_path = {"old": f"output_blocks.{i}.0", "new": f"up_blocks.{block_id}.resnets.{layer_in_block_id}"}
assign_to_checkpoint(
paths, new_checkpoint, unet_state_dict, additional_replacements=[meta_path], config=config
)
output_block_list = {k: sorted(v) for k, v in output_block_list.items()}
if ["conv.bias", "conv.weight"] in output_block_list.values():
index = list(output_block_list.values()).index(["conv.bias", "conv.weight"])
new_checkpoint[f"up_blocks.{block_id}.upsamplers.0.conv.weight"] = unet_state_dict[
f"output_blocks.{i}.{index}.conv.weight"
]
new_checkpoint[f"up_blocks.{block_id}.upsamplers.0.conv.bias"] = unet_state_dict[
f"output_blocks.{i}.{index}.conv.bias"
]
# this layer was no attention
has_attention = False
maybe_attentions = []
if has_attention:
old_path = f"output_blocks.{i}.1"
new_path = f"up_blocks.{block_id}.attentions.{layer_in_block_id}"
assign_attention_to_checkpoint(
new_checkpoint=new_checkpoint,
unet_state_dict=unet_state_dict,
old_path=old_path,
new_path=new_path,
config=config,
)
paths = renew_attention_paths(maybe_attentions)
meta_path = {
"old": old_path,
"new": new_path,
}
assign_to_checkpoint(
paths, new_checkpoint, unet_state_dict, additional_replacements=[meta_path], config=config
)
if len(output_block_list) == 3 or (not has_attention and len(maybe_attentions) > 0):
layer_id = len(output_block_list) - 1
resnets = [key for key in output_blocks[i] if f"output_blocks.{i}.{layer_id}" in key]
paths = renew_resnet_paths(resnets)
meta_path = {"old": f"output_blocks.{i}.{layer_id}", "new": f"up_blocks.{block_id}.upsamplers.0"}
assign_to_checkpoint(
paths, new_checkpoint, unet_state_dict, additional_replacements=[meta_path], config=config
)
else:
resnet_0_paths = renew_resnet_paths(output_block_layers, n_shave_prefix_segments=1)
for path in resnet_0_paths:
old_path = ".".join(["output_blocks", str(i), path["old"]])
new_path = ".".join(["up_blocks", str(block_id), "resnets", str(layer_in_block_id), path["new"]])
new_checkpoint[new_path] = unet_state_dict[old_path]
return new_checkpoint
def verify_param_count(orig_path, unet_diffusers_config):
if "-II-" in orig_path:
from deepfloyd_if.modules import IFStageII
if_II = IFStageII(device="cpu", dir_or_name=orig_path)
elif "-III-" in orig_path:
from deepfloyd_if.modules import IFStageIII
if_II = IFStageIII(device="cpu", dir_or_name=orig_path)
else:
assert f"Weird name. Should have -II- or -III- in path: {orig_path}"
unet = UNet2DConditionModel(**unet_diffusers_config)
# in params
assert_param_count(unet.time_embedding, if_II.model.time_embed)
assert_param_count(unet.conv_in, if_II.model.input_blocks[:1])
# downblocks
assert_param_count(unet.down_blocks[0], if_II.model.input_blocks[1:4])
assert_param_count(unet.down_blocks[1], if_II.model.input_blocks[4:7])
assert_param_count(unet.down_blocks[2], if_II.model.input_blocks[7:11])
if "-II-" in orig_path:
assert_param_count(unet.down_blocks[3], if_II.model.input_blocks[11:17])
assert_param_count(unet.down_blocks[4], if_II.model.input_blocks[17:])
if "-III-" in orig_path:
assert_param_count(unet.down_blocks[3], if_II.model.input_blocks[11:15])
assert_param_count(unet.down_blocks[4], if_II.model.input_blocks[15:20])
assert_param_count(unet.down_blocks[5], if_II.model.input_blocks[20:])
# mid block
assert_param_count(unet.mid_block, if_II.model.middle_block)
# up block
if "-II-" in orig_path:
assert_param_count(unet.up_blocks[0], if_II.model.output_blocks[:6])
assert_param_count(unet.up_blocks[1], if_II.model.output_blocks[6:12])
assert_param_count(unet.up_blocks[2], if_II.model.output_blocks[12:16])
assert_param_count(unet.up_blocks[3], if_II.model.output_blocks[16:19])
assert_param_count(unet.up_blocks[4], if_II.model.output_blocks[19:])
if "-III-" in orig_path:
assert_param_count(unet.up_blocks[0], if_II.model.output_blocks[:5])
assert_param_count(unet.up_blocks[1], if_II.model.output_blocks[5:10])
assert_param_count(unet.up_blocks[2], if_II.model.output_blocks[10:14])
assert_param_count(unet.up_blocks[3], if_II.model.output_blocks[14:18])
assert_param_count(unet.up_blocks[4], if_II.model.output_blocks[18:21])
assert_param_count(unet.up_blocks[5], if_II.model.output_blocks[21:24])
# out params
assert_param_count(unet.conv_norm_out, if_II.model.out[0])
assert_param_count(unet.conv_out, if_II.model.out[2])
# make sure all model architecture has same param count
assert_param_count(unet, if_II.model)
def assert_param_count(model_1, model_2):
count_1 = sum(p.numel() for p in model_1.parameters())
count_2 = sum(p.numel() for p in model_2.parameters())
assert count_1 == count_2, f"{model_1.__class__}: {count_1} != {model_2.__class__}: {count_2}"
def superres_check_against_original(dump_path, unet_checkpoint_path):
model_path = dump_path
model = UNet2DConditionModel.from_pretrained(model_path)
model.to("cuda")
orig_path = unet_checkpoint_path
if "-II-" in orig_path:
from deepfloyd_if.modules import IFStageII
if_II_model = IFStageII(device="cuda", dir_or_name=orig_path, model_kwargs={"precision": "fp32"}).model
elif "-III-" in orig_path:
from deepfloyd_if.modules import IFStageIII
if_II_model = IFStageIII(device="cuda", dir_or_name=orig_path, model_kwargs={"precision": "fp32"}).model
batch_size = 1
channels = model.in_channels // 2
height = model.sample_size
width = model.sample_size
height = 1024
width = 1024
torch.manual_seed(0)
latents = torch.randn((batch_size, channels, height, width), device=model.device)
image_small = torch.randn((batch_size, channels, height // 4, width // 4), device=model.device)
interpolate_antialias = {}
if "antialias" in inspect.signature(F.interpolate).parameters:
interpolate_antialias["antialias"] = True
image_upscaled = F.interpolate(
image_small, size=[height, width], mode="bicubic", align_corners=False, **interpolate_antialias
)
latent_model_input = torch.cat([latents, image_upscaled], dim=1).to(model.dtype)
t = torch.tensor([5], device=model.device).to(model.dtype)
seq_len = 64
encoder_hidden_states = torch.randn((batch_size, seq_len, model.config.encoder_hid_dim), device=model.device).to(
model.dtype
)
fake_class_labels = torch.tensor([t], device=model.device).to(model.dtype)
with torch.no_grad():
out = if_II_model(latent_model_input, t, aug_steps=fake_class_labels, text_emb=encoder_hidden_states)
if_II_model.to("cpu")
del if_II_model
import gc
torch.cuda.empty_cache()
gc.collect()
print(50 * "=")
with torch.no_grad():
noise_pred = model(
sample=latent_model_input,
encoder_hidden_states=encoder_hidden_states,
class_labels=fake_class_labels,
timestep=t,
).sample
print("Out shape", noise_pred.shape)
print("Diff", (out - noise_pred).abs().sum())
if __name__ == "__main__":
main(parse_args())
| 0 |
hf_public_repos/diffusers | hf_public_repos/diffusers/scripts/convert_k_upscaler_to_diffusers.py | import argparse
import huggingface_hub
import k_diffusion as K
import torch
from diffusers import UNet2DConditionModel
UPSCALER_REPO = "pcuenq/k-upscaler"
def resnet_to_diffusers_checkpoint(resnet, checkpoint, *, diffusers_resnet_prefix, resnet_prefix):
rv = {
# norm1
f"{diffusers_resnet_prefix}.norm1.linear.weight": checkpoint[f"{resnet_prefix}.main.0.mapper.weight"],
f"{diffusers_resnet_prefix}.norm1.linear.bias": checkpoint[f"{resnet_prefix}.main.0.mapper.bias"],
# conv1
f"{diffusers_resnet_prefix}.conv1.weight": checkpoint[f"{resnet_prefix}.main.2.weight"],
f"{diffusers_resnet_prefix}.conv1.bias": checkpoint[f"{resnet_prefix}.main.2.bias"],
# norm2
f"{diffusers_resnet_prefix}.norm2.linear.weight": checkpoint[f"{resnet_prefix}.main.4.mapper.weight"],
f"{diffusers_resnet_prefix}.norm2.linear.bias": checkpoint[f"{resnet_prefix}.main.4.mapper.bias"],
# conv2
f"{diffusers_resnet_prefix}.conv2.weight": checkpoint[f"{resnet_prefix}.main.6.weight"],
f"{diffusers_resnet_prefix}.conv2.bias": checkpoint[f"{resnet_prefix}.main.6.bias"],
}
if resnet.conv_shortcut is not None:
rv.update(
{
f"{diffusers_resnet_prefix}.conv_shortcut.weight": checkpoint[f"{resnet_prefix}.skip.weight"],
}
)
return rv
def self_attn_to_diffusers_checkpoint(checkpoint, *, diffusers_attention_prefix, attention_prefix):
weight_q, weight_k, weight_v = checkpoint[f"{attention_prefix}.qkv_proj.weight"].chunk(3, dim=0)
bias_q, bias_k, bias_v = checkpoint[f"{attention_prefix}.qkv_proj.bias"].chunk(3, dim=0)
rv = {
# norm
f"{diffusers_attention_prefix}.norm1.linear.weight": checkpoint[f"{attention_prefix}.norm_in.mapper.weight"],
f"{diffusers_attention_prefix}.norm1.linear.bias": checkpoint[f"{attention_prefix}.norm_in.mapper.bias"],
# to_q
f"{diffusers_attention_prefix}.attn1.to_q.weight": weight_q.squeeze(-1).squeeze(-1),
f"{diffusers_attention_prefix}.attn1.to_q.bias": bias_q,
# to_k
f"{diffusers_attention_prefix}.attn1.to_k.weight": weight_k.squeeze(-1).squeeze(-1),
f"{diffusers_attention_prefix}.attn1.to_k.bias": bias_k,
# to_v
f"{diffusers_attention_prefix}.attn1.to_v.weight": weight_v.squeeze(-1).squeeze(-1),
f"{diffusers_attention_prefix}.attn1.to_v.bias": bias_v,
# to_out
f"{diffusers_attention_prefix}.attn1.to_out.0.weight": checkpoint[f"{attention_prefix}.out_proj.weight"]
.squeeze(-1)
.squeeze(-1),
f"{diffusers_attention_prefix}.attn1.to_out.0.bias": checkpoint[f"{attention_prefix}.out_proj.bias"],
}
return rv
def cross_attn_to_diffusers_checkpoint(
checkpoint, *, diffusers_attention_prefix, diffusers_attention_index, attention_prefix
):
weight_k, weight_v = checkpoint[f"{attention_prefix}.kv_proj.weight"].chunk(2, dim=0)
bias_k, bias_v = checkpoint[f"{attention_prefix}.kv_proj.bias"].chunk(2, dim=0)
rv = {
# norm2 (ada groupnorm)
f"{diffusers_attention_prefix}.norm{diffusers_attention_index}.linear.weight": checkpoint[
f"{attention_prefix}.norm_dec.mapper.weight"
],
f"{diffusers_attention_prefix}.norm{diffusers_attention_index}.linear.bias": checkpoint[
f"{attention_prefix}.norm_dec.mapper.bias"
],
# layernorm on encoder_hidden_state
f"{diffusers_attention_prefix}.attn{diffusers_attention_index}.norm_cross.weight": checkpoint[
f"{attention_prefix}.norm_enc.weight"
],
f"{diffusers_attention_prefix}.attn{diffusers_attention_index}.norm_cross.bias": checkpoint[
f"{attention_prefix}.norm_enc.bias"
],
# to_q
f"{diffusers_attention_prefix}.attn{diffusers_attention_index}.to_q.weight": checkpoint[
f"{attention_prefix}.q_proj.weight"
]
.squeeze(-1)
.squeeze(-1),
f"{diffusers_attention_prefix}.attn{diffusers_attention_index}.to_q.bias": checkpoint[
f"{attention_prefix}.q_proj.bias"
],
# to_k
f"{diffusers_attention_prefix}.attn{diffusers_attention_index}.to_k.weight": weight_k.squeeze(-1).squeeze(-1),
f"{diffusers_attention_prefix}.attn{diffusers_attention_index}.to_k.bias": bias_k,
# to_v
f"{diffusers_attention_prefix}.attn{diffusers_attention_index}.to_v.weight": weight_v.squeeze(-1).squeeze(-1),
f"{diffusers_attention_prefix}.attn{diffusers_attention_index}.to_v.bias": bias_v,
# to_out
f"{diffusers_attention_prefix}.attn{diffusers_attention_index}.to_out.0.weight": checkpoint[
f"{attention_prefix}.out_proj.weight"
]
.squeeze(-1)
.squeeze(-1),
f"{diffusers_attention_prefix}.attn{diffusers_attention_index}.to_out.0.bias": checkpoint[
f"{attention_prefix}.out_proj.bias"
],
}
return rv
def block_to_diffusers_checkpoint(block, checkpoint, block_idx, block_type):
block_prefix = "inner_model.u_net.u_blocks" if block_type == "up" else "inner_model.u_net.d_blocks"
block_prefix = f"{block_prefix}.{block_idx}"
diffusers_checkpoint = {}
if not hasattr(block, "attentions"):
n = 1 # resnet only
elif not block.attentions[0].add_self_attention:
n = 2 # resnet -> cross-attention
else:
n = 3 # resnet -> self-attention -> cross-attention)
for resnet_idx, resnet in enumerate(block.resnets):
# diffusers_resnet_prefix = f"{diffusers_up_block_prefix}.resnets.{resnet_idx}"
diffusers_resnet_prefix = f"{block_type}_blocks.{block_idx}.resnets.{resnet_idx}"
idx = n * resnet_idx if block_type == "up" else n * resnet_idx + 1
resnet_prefix = f"{block_prefix}.{idx}" if block_type == "up" else f"{block_prefix}.{idx}"
diffusers_checkpoint.update(
resnet_to_diffusers_checkpoint(
resnet, checkpoint, diffusers_resnet_prefix=diffusers_resnet_prefix, resnet_prefix=resnet_prefix
)
)
if hasattr(block, "attentions"):
for attention_idx, attention in enumerate(block.attentions):
diffusers_attention_prefix = f"{block_type}_blocks.{block_idx}.attentions.{attention_idx}"
idx = n * attention_idx + 1 if block_type == "up" else n * attention_idx + 2
self_attention_prefix = f"{block_prefix}.{idx}"
cross_attention_prefix = f"{block_prefix}.{idx }"
cross_attention_index = 1 if not attention.add_self_attention else 2
idx = (
n * attention_idx + cross_attention_index
if block_type == "up"
else n * attention_idx + cross_attention_index + 1
)
cross_attention_prefix = f"{block_prefix}.{idx }"
diffusers_checkpoint.update(
cross_attn_to_diffusers_checkpoint(
checkpoint,
diffusers_attention_prefix=diffusers_attention_prefix,
diffusers_attention_index=2,
attention_prefix=cross_attention_prefix,
)
)
if attention.add_self_attention is True:
diffusers_checkpoint.update(
self_attn_to_diffusers_checkpoint(
checkpoint,
diffusers_attention_prefix=diffusers_attention_prefix,
attention_prefix=self_attention_prefix,
)
)
return diffusers_checkpoint
def unet_to_diffusers_checkpoint(model, checkpoint):
diffusers_checkpoint = {}
# pre-processing
diffusers_checkpoint.update(
{
"conv_in.weight": checkpoint["inner_model.proj_in.weight"],
"conv_in.bias": checkpoint["inner_model.proj_in.bias"],
}
)
# timestep and class embedding
diffusers_checkpoint.update(
{
"time_proj.weight": checkpoint["inner_model.timestep_embed.weight"].squeeze(-1),
"time_embedding.linear_1.weight": checkpoint["inner_model.mapping.0.weight"],
"time_embedding.linear_1.bias": checkpoint["inner_model.mapping.0.bias"],
"time_embedding.linear_2.weight": checkpoint["inner_model.mapping.2.weight"],
"time_embedding.linear_2.bias": checkpoint["inner_model.mapping.2.bias"],
"time_embedding.cond_proj.weight": checkpoint["inner_model.mapping_cond.weight"],
}
)
# down_blocks
for down_block_idx, down_block in enumerate(model.down_blocks):
diffusers_checkpoint.update(block_to_diffusers_checkpoint(down_block, checkpoint, down_block_idx, "down"))
# up_blocks
for up_block_idx, up_block in enumerate(model.up_blocks):
diffusers_checkpoint.update(block_to_diffusers_checkpoint(up_block, checkpoint, up_block_idx, "up"))
# post-processing
diffusers_checkpoint.update(
{
"conv_out.weight": checkpoint["inner_model.proj_out.weight"],
"conv_out.bias": checkpoint["inner_model.proj_out.bias"],
}
)
return diffusers_checkpoint
def unet_model_from_original_config(original_config):
in_channels = original_config["input_channels"] + original_config["unet_cond_dim"]
out_channels = original_config["input_channels"] + (1 if original_config["has_variance"] else 0)
block_out_channels = original_config["channels"]
assert (
len(set(original_config["depths"])) == 1
), "UNet2DConditionModel currently do not support blocks with different number of layers"
layers_per_block = original_config["depths"][0]
class_labels_dim = original_config["mapping_cond_dim"]
cross_attention_dim = original_config["cross_cond_dim"]
attn1_types = []
attn2_types = []
for s, c in zip(original_config["self_attn_depths"], original_config["cross_attn_depths"]):
if s:
a1 = "self"
a2 = "cross" if c else None
elif c:
a1 = "cross"
a2 = None
else:
a1 = None
a2 = None
attn1_types.append(a1)
attn2_types.append(a2)
unet = UNet2DConditionModel(
in_channels=in_channels,
out_channels=out_channels,
down_block_types=("KDownBlock2D", "KCrossAttnDownBlock2D", "KCrossAttnDownBlock2D", "KCrossAttnDownBlock2D"),
mid_block_type=None,
up_block_types=("KCrossAttnUpBlock2D", "KCrossAttnUpBlock2D", "KCrossAttnUpBlock2D", "KUpBlock2D"),
block_out_channels=block_out_channels,
layers_per_block=layers_per_block,
act_fn="gelu",
norm_num_groups=None,
cross_attention_dim=cross_attention_dim,
attention_head_dim=64,
time_cond_proj_dim=class_labels_dim,
resnet_time_scale_shift="scale_shift",
time_embedding_type="fourier",
timestep_post_act="gelu",
conv_in_kernel=1,
conv_out_kernel=1,
)
return unet
def main(args):
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
orig_config_path = huggingface_hub.hf_hub_download(UPSCALER_REPO, "config_laion_text_cond_latent_upscaler_2.json")
orig_weights_path = huggingface_hub.hf_hub_download(
UPSCALER_REPO, "laion_text_cond_latent_upscaler_2_1_00470000_slim.pth"
)
print(f"loading original model configuration from {orig_config_path}")
print(f"loading original model checkpoint from {orig_weights_path}")
print("converting to diffusers unet")
orig_config = K.config.load_config(open(orig_config_path))["model"]
model = unet_model_from_original_config(orig_config)
orig_checkpoint = torch.load(orig_weights_path, map_location=device)["model_ema"]
converted_checkpoint = unet_to_diffusers_checkpoint(model, orig_checkpoint)
model.load_state_dict(converted_checkpoint, strict=True)
model.save_pretrained(args.dump_path)
print(f"saving converted unet model in {args.dump_path}")
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument("--dump_path", default=None, type=str, required=True, help="Path to the output model.")
args = parser.parse_args()
main(args)
| 0 |
hf_public_repos/diffusers | hf_public_repos/diffusers/scripts/conversion_ldm_uncond.py | import argparse
import OmegaConf
import torch
from diffusers import DDIMScheduler, LDMPipeline, UNetLDMModel, VQModel
def convert_ldm_original(checkpoint_path, config_path, output_path):
config = OmegaConf.load(config_path)
state_dict = torch.load(checkpoint_path, map_location="cpu")["model"]
keys = list(state_dict.keys())
# extract state_dict for VQVAE
first_stage_dict = {}
first_stage_key = "first_stage_model."
for key in keys:
if key.startswith(first_stage_key):
first_stage_dict[key.replace(first_stage_key, "")] = state_dict[key]
# extract state_dict for UNetLDM
unet_state_dict = {}
unet_key = "model.diffusion_model."
for key in keys:
if key.startswith(unet_key):
unet_state_dict[key.replace(unet_key, "")] = state_dict[key]
vqvae_init_args = config.model.params.first_stage_config.params
unet_init_args = config.model.params.unet_config.params
vqvae = VQModel(**vqvae_init_args).eval()
vqvae.load_state_dict(first_stage_dict)
unet = UNetLDMModel(**unet_init_args).eval()
unet.load_state_dict(unet_state_dict)
noise_scheduler = DDIMScheduler(
timesteps=config.model.params.timesteps,
beta_schedule="scaled_linear",
beta_start=config.model.params.linear_start,
beta_end=config.model.params.linear_end,
clip_sample=False,
)
pipeline = LDMPipeline(vqvae, unet, noise_scheduler)
pipeline.save_pretrained(output_path)
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument("--checkpoint_path", type=str, required=True)
parser.add_argument("--config_path", type=str, required=True)
parser.add_argument("--output_path", type=str, required=True)
args = parser.parse_args()
convert_ldm_original(args.checkpoint_path, args.config_path, args.output_path)
| 0 |
hf_public_repos/diffusers | hf_public_repos/diffusers/scripts/convert_kakao_brain_unclip_to_diffusers.py | import argparse
import tempfile
import torch
from accelerate import load_checkpoint_and_dispatch
from transformers import CLIPTextModelWithProjection, CLIPTokenizer
from diffusers import UnCLIPPipeline, UNet2DConditionModel, UNet2DModel
from diffusers.models.prior_transformer import PriorTransformer
from diffusers.pipelines.unclip.text_proj import UnCLIPTextProjModel
from diffusers.schedulers.scheduling_unclip import UnCLIPScheduler
"""
Example - From the diffusers root directory:
Download weights:
```sh
$ wget https://arena.kakaocdn.net/brainrepo/models/karlo-public/v1.0.0.alpha/efdf6206d8ed593961593dc029a8affa/decoder-ckpt-step%3D01000000-of-01000000.ckpt
$ wget https://arena.kakaocdn.net/brainrepo/models/karlo-public/v1.0.0.alpha/4226b831ae0279020d134281f3c31590/improved-sr-ckpt-step%3D1.2M.ckpt
$ wget https://arena.kakaocdn.net/brainrepo/models/karlo-public/v1.0.0.alpha/85626483eaca9f581e2a78d31ff905ca/prior-ckpt-step%3D01000000-of-01000000.ckpt
$ wget https://arena.kakaocdn.net/brainrepo/models/karlo-public/v1.0.0.alpha/0b62380a75e56f073e2844ab5199153d/ViT-L-14_stats.th
```
Convert the model:
```sh
$ python scripts/convert_kakao_brain_unclip_to_diffusers.py \
--decoder_checkpoint_path ./decoder-ckpt-step\=01000000-of-01000000.ckpt \
--super_res_unet_checkpoint_path ./improved-sr-ckpt-step\=1.2M.ckpt \
--prior_checkpoint_path ./prior-ckpt-step\=01000000-of-01000000.ckpt \
--clip_stat_path ./ViT-L-14_stats.th \
--dump_path <path where to save model>
```
"""
# prior
PRIOR_ORIGINAL_PREFIX = "model"
# Uses default arguments
PRIOR_CONFIG = {}
def prior_model_from_original_config():
model = PriorTransformer(**PRIOR_CONFIG)
return model
def prior_original_checkpoint_to_diffusers_checkpoint(model, checkpoint, clip_stats_checkpoint):
diffusers_checkpoint = {}
# <original>.time_embed.0 -> <diffusers>.time_embedding.linear_1
diffusers_checkpoint.update(
{
"time_embedding.linear_1.weight": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.time_embed.0.weight"],
"time_embedding.linear_1.bias": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.time_embed.0.bias"],
}
)
# <original>.clip_img_proj -> <diffusers>.proj_in
diffusers_checkpoint.update(
{
"proj_in.weight": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.clip_img_proj.weight"],
"proj_in.bias": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.clip_img_proj.bias"],
}
)
# <original>.text_emb_proj -> <diffusers>.embedding_proj
diffusers_checkpoint.update(
{
"embedding_proj.weight": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.text_emb_proj.weight"],
"embedding_proj.bias": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.text_emb_proj.bias"],
}
)
# <original>.text_enc_proj -> <diffusers>.encoder_hidden_states_proj
diffusers_checkpoint.update(
{
"encoder_hidden_states_proj.weight": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.text_enc_proj.weight"],
"encoder_hidden_states_proj.bias": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.text_enc_proj.bias"],
}
)
# <original>.positional_embedding -> <diffusers>.positional_embedding
diffusers_checkpoint.update({"positional_embedding": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.positional_embedding"]})
# <original>.prd_emb -> <diffusers>.prd_embedding
diffusers_checkpoint.update({"prd_embedding": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.prd_emb"]})
# <original>.time_embed.2 -> <diffusers>.time_embedding.linear_2
diffusers_checkpoint.update(
{
"time_embedding.linear_2.weight": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.time_embed.2.weight"],
"time_embedding.linear_2.bias": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.time_embed.2.bias"],
}
)
# <original>.resblocks.<x> -> <diffusers>.transformer_blocks.<x>
for idx in range(len(model.transformer_blocks)):
diffusers_transformer_prefix = f"transformer_blocks.{idx}"
original_transformer_prefix = f"{PRIOR_ORIGINAL_PREFIX}.transformer.resblocks.{idx}"
# <original>.attn -> <diffusers>.attn1
diffusers_attention_prefix = f"{diffusers_transformer_prefix}.attn1"
original_attention_prefix = f"{original_transformer_prefix}.attn"
diffusers_checkpoint.update(
prior_attention_to_diffusers(
checkpoint,
diffusers_attention_prefix=diffusers_attention_prefix,
original_attention_prefix=original_attention_prefix,
attention_head_dim=model.attention_head_dim,
)
)
# <original>.mlp -> <diffusers>.ff
diffusers_ff_prefix = f"{diffusers_transformer_prefix}.ff"
original_ff_prefix = f"{original_transformer_prefix}.mlp"
diffusers_checkpoint.update(
prior_ff_to_diffusers(
checkpoint, diffusers_ff_prefix=diffusers_ff_prefix, original_ff_prefix=original_ff_prefix
)
)
# <original>.ln_1 -> <diffusers>.norm1
diffusers_checkpoint.update(
{
f"{diffusers_transformer_prefix}.norm1.weight": checkpoint[
f"{original_transformer_prefix}.ln_1.weight"
],
f"{diffusers_transformer_prefix}.norm1.bias": checkpoint[f"{original_transformer_prefix}.ln_1.bias"],
}
)
# <original>.ln_2 -> <diffusers>.norm3
diffusers_checkpoint.update(
{
f"{diffusers_transformer_prefix}.norm3.weight": checkpoint[
f"{original_transformer_prefix}.ln_2.weight"
],
f"{diffusers_transformer_prefix}.norm3.bias": checkpoint[f"{original_transformer_prefix}.ln_2.bias"],
}
)
# <original>.final_ln -> <diffusers>.norm_out
diffusers_checkpoint.update(
{
"norm_out.weight": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.final_ln.weight"],
"norm_out.bias": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.final_ln.bias"],
}
)
# <original>.out_proj -> <diffusers>.proj_to_clip_embeddings
diffusers_checkpoint.update(
{
"proj_to_clip_embeddings.weight": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.out_proj.weight"],
"proj_to_clip_embeddings.bias": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.out_proj.bias"],
}
)
# clip stats
clip_mean, clip_std = clip_stats_checkpoint
clip_mean = clip_mean[None, :]
clip_std = clip_std[None, :]
diffusers_checkpoint.update({"clip_mean": clip_mean, "clip_std": clip_std})
return diffusers_checkpoint
def prior_attention_to_diffusers(
checkpoint, *, diffusers_attention_prefix, original_attention_prefix, attention_head_dim
):
diffusers_checkpoint = {}
# <original>.c_qkv -> <diffusers>.{to_q, to_k, to_v}
[q_weight, k_weight, v_weight], [q_bias, k_bias, v_bias] = split_attentions(
weight=checkpoint[f"{original_attention_prefix}.c_qkv.weight"],
bias=checkpoint[f"{original_attention_prefix}.c_qkv.bias"],
split=3,
chunk_size=attention_head_dim,
)
diffusers_checkpoint.update(
{
f"{diffusers_attention_prefix}.to_q.weight": q_weight,
f"{diffusers_attention_prefix}.to_q.bias": q_bias,
f"{diffusers_attention_prefix}.to_k.weight": k_weight,
f"{diffusers_attention_prefix}.to_k.bias": k_bias,
f"{diffusers_attention_prefix}.to_v.weight": v_weight,
f"{diffusers_attention_prefix}.to_v.bias": v_bias,
}
)
# <original>.c_proj -> <diffusers>.to_out.0
diffusers_checkpoint.update(
{
f"{diffusers_attention_prefix}.to_out.0.weight": checkpoint[f"{original_attention_prefix}.c_proj.weight"],
f"{diffusers_attention_prefix}.to_out.0.bias": checkpoint[f"{original_attention_prefix}.c_proj.bias"],
}
)
return diffusers_checkpoint
def prior_ff_to_diffusers(checkpoint, *, diffusers_ff_prefix, original_ff_prefix):
diffusers_checkpoint = {
# <original>.c_fc -> <diffusers>.net.0.proj
f"{diffusers_ff_prefix}.net.{0}.proj.weight": checkpoint[f"{original_ff_prefix}.c_fc.weight"],
f"{diffusers_ff_prefix}.net.{0}.proj.bias": checkpoint[f"{original_ff_prefix}.c_fc.bias"],
# <original>.c_proj -> <diffusers>.net.2
f"{diffusers_ff_prefix}.net.{2}.weight": checkpoint[f"{original_ff_prefix}.c_proj.weight"],
f"{diffusers_ff_prefix}.net.{2}.bias": checkpoint[f"{original_ff_prefix}.c_proj.bias"],
}
return diffusers_checkpoint
# done prior
# decoder
DECODER_ORIGINAL_PREFIX = "model"
# We are hardcoding the model configuration for now. If we need to generalize to more model configurations, we can
# update then.
DECODER_CONFIG = {
"sample_size": 64,
"layers_per_block": 3,
"down_block_types": (
"ResnetDownsampleBlock2D",
"SimpleCrossAttnDownBlock2D",
"SimpleCrossAttnDownBlock2D",
"SimpleCrossAttnDownBlock2D",
),
"up_block_types": (
"SimpleCrossAttnUpBlock2D",
"SimpleCrossAttnUpBlock2D",
"SimpleCrossAttnUpBlock2D",
"ResnetUpsampleBlock2D",
),
"mid_block_type": "UNetMidBlock2DSimpleCrossAttn",
"block_out_channels": (320, 640, 960, 1280),
"in_channels": 3,
"out_channels": 6,
"cross_attention_dim": 1536,
"class_embed_type": "identity",
"attention_head_dim": 64,
"resnet_time_scale_shift": "scale_shift",
}
def decoder_model_from_original_config():
model = UNet2DConditionModel(**DECODER_CONFIG)
return model
def decoder_original_checkpoint_to_diffusers_checkpoint(model, checkpoint):
diffusers_checkpoint = {}
original_unet_prefix = DECODER_ORIGINAL_PREFIX
num_head_channels = DECODER_CONFIG["attention_head_dim"]
diffusers_checkpoint.update(unet_time_embeddings(checkpoint, original_unet_prefix))
diffusers_checkpoint.update(unet_conv_in(checkpoint, original_unet_prefix))
# <original>.input_blocks -> <diffusers>.down_blocks
original_down_block_idx = 1
for diffusers_down_block_idx in range(len(model.down_blocks)):
checkpoint_update, num_original_down_blocks = unet_downblock_to_diffusers_checkpoint(
model,
checkpoint,
diffusers_down_block_idx=diffusers_down_block_idx,
original_down_block_idx=original_down_block_idx,
original_unet_prefix=original_unet_prefix,
num_head_channels=num_head_channels,
)
original_down_block_idx += num_original_down_blocks
diffusers_checkpoint.update(checkpoint_update)
# done <original>.input_blocks -> <diffusers>.down_blocks
diffusers_checkpoint.update(
unet_midblock_to_diffusers_checkpoint(
model,
checkpoint,
original_unet_prefix=original_unet_prefix,
num_head_channels=num_head_channels,
)
)
# <original>.output_blocks -> <diffusers>.up_blocks
original_up_block_idx = 0
for diffusers_up_block_idx in range(len(model.up_blocks)):
checkpoint_update, num_original_up_blocks = unet_upblock_to_diffusers_checkpoint(
model,
checkpoint,
diffusers_up_block_idx=diffusers_up_block_idx,
original_up_block_idx=original_up_block_idx,
original_unet_prefix=original_unet_prefix,
num_head_channels=num_head_channels,
)
original_up_block_idx += num_original_up_blocks
diffusers_checkpoint.update(checkpoint_update)
# done <original>.output_blocks -> <diffusers>.up_blocks
diffusers_checkpoint.update(unet_conv_norm_out(checkpoint, original_unet_prefix))
diffusers_checkpoint.update(unet_conv_out(checkpoint, original_unet_prefix))
return diffusers_checkpoint
# done decoder
# text proj
def text_proj_from_original_config():
# From the conditional unet constructor where the dimension of the projected time embeddings is
# constructed
time_embed_dim = DECODER_CONFIG["block_out_channels"][0] * 4
cross_attention_dim = DECODER_CONFIG["cross_attention_dim"]
model = UnCLIPTextProjModel(time_embed_dim=time_embed_dim, cross_attention_dim=cross_attention_dim)
return model
# Note that the input checkpoint is the original decoder checkpoint
def text_proj_original_checkpoint_to_diffusers_checkpoint(checkpoint):
diffusers_checkpoint = {
# <original>.text_seq_proj.0 -> <diffusers>.encoder_hidden_states_proj
"encoder_hidden_states_proj.weight": checkpoint[f"{DECODER_ORIGINAL_PREFIX}.text_seq_proj.0.weight"],
"encoder_hidden_states_proj.bias": checkpoint[f"{DECODER_ORIGINAL_PREFIX}.text_seq_proj.0.bias"],
# <original>.text_seq_proj.1 -> <diffusers>.text_encoder_hidden_states_norm
"text_encoder_hidden_states_norm.weight": checkpoint[f"{DECODER_ORIGINAL_PREFIX}.text_seq_proj.1.weight"],
"text_encoder_hidden_states_norm.bias": checkpoint[f"{DECODER_ORIGINAL_PREFIX}.text_seq_proj.1.bias"],
# <original>.clip_tok_proj -> <diffusers>.clip_extra_context_tokens_proj
"clip_extra_context_tokens_proj.weight": checkpoint[f"{DECODER_ORIGINAL_PREFIX}.clip_tok_proj.weight"],
"clip_extra_context_tokens_proj.bias": checkpoint[f"{DECODER_ORIGINAL_PREFIX}.clip_tok_proj.bias"],
# <original>.text_feat_proj -> <diffusers>.embedding_proj
"embedding_proj.weight": checkpoint[f"{DECODER_ORIGINAL_PREFIX}.text_feat_proj.weight"],
"embedding_proj.bias": checkpoint[f"{DECODER_ORIGINAL_PREFIX}.text_feat_proj.bias"],
# <original>.cf_param -> <diffusers>.learned_classifier_free_guidance_embeddings
"learned_classifier_free_guidance_embeddings": checkpoint[f"{DECODER_ORIGINAL_PREFIX}.cf_param"],
# <original>.clip_emb -> <diffusers>.clip_image_embeddings_project_to_time_embeddings
"clip_image_embeddings_project_to_time_embeddings.weight": checkpoint[
f"{DECODER_ORIGINAL_PREFIX}.clip_emb.weight"
],
"clip_image_embeddings_project_to_time_embeddings.bias": checkpoint[
f"{DECODER_ORIGINAL_PREFIX}.clip_emb.bias"
],
}
return diffusers_checkpoint
# done text proj
# super res unet first steps
SUPER_RES_UNET_FIRST_STEPS_PREFIX = "model_first_steps"
SUPER_RES_UNET_FIRST_STEPS_CONFIG = {
"sample_size": 256,
"layers_per_block": 3,
"down_block_types": (
"ResnetDownsampleBlock2D",
"ResnetDownsampleBlock2D",
"ResnetDownsampleBlock2D",
"ResnetDownsampleBlock2D",
),
"up_block_types": (
"ResnetUpsampleBlock2D",
"ResnetUpsampleBlock2D",
"ResnetUpsampleBlock2D",
"ResnetUpsampleBlock2D",
),
"block_out_channels": (320, 640, 960, 1280),
"in_channels": 6,
"out_channels": 3,
"add_attention": False,
}
def super_res_unet_first_steps_model_from_original_config():
model = UNet2DModel(**SUPER_RES_UNET_FIRST_STEPS_CONFIG)
return model
def super_res_unet_first_steps_original_checkpoint_to_diffusers_checkpoint(model, checkpoint):
diffusers_checkpoint = {}
original_unet_prefix = SUPER_RES_UNET_FIRST_STEPS_PREFIX
diffusers_checkpoint.update(unet_time_embeddings(checkpoint, original_unet_prefix))
diffusers_checkpoint.update(unet_conv_in(checkpoint, original_unet_prefix))
# <original>.input_blocks -> <diffusers>.down_blocks
original_down_block_idx = 1
for diffusers_down_block_idx in range(len(model.down_blocks)):
checkpoint_update, num_original_down_blocks = unet_downblock_to_diffusers_checkpoint(
model,
checkpoint,
diffusers_down_block_idx=diffusers_down_block_idx,
original_down_block_idx=original_down_block_idx,
original_unet_prefix=original_unet_prefix,
num_head_channels=None,
)
original_down_block_idx += num_original_down_blocks
diffusers_checkpoint.update(checkpoint_update)
diffusers_checkpoint.update(
unet_midblock_to_diffusers_checkpoint(
model,
checkpoint,
original_unet_prefix=original_unet_prefix,
num_head_channels=None,
)
)
# <original>.output_blocks -> <diffusers>.up_blocks
original_up_block_idx = 0
for diffusers_up_block_idx in range(len(model.up_blocks)):
checkpoint_update, num_original_up_blocks = unet_upblock_to_diffusers_checkpoint(
model,
checkpoint,
diffusers_up_block_idx=diffusers_up_block_idx,
original_up_block_idx=original_up_block_idx,
original_unet_prefix=original_unet_prefix,
num_head_channels=None,
)
original_up_block_idx += num_original_up_blocks
diffusers_checkpoint.update(checkpoint_update)
# done <original>.output_blocks -> <diffusers>.up_blocks
diffusers_checkpoint.update(unet_conv_norm_out(checkpoint, original_unet_prefix))
diffusers_checkpoint.update(unet_conv_out(checkpoint, original_unet_prefix))
return diffusers_checkpoint
# done super res unet first steps
# super res unet last step
SUPER_RES_UNET_LAST_STEP_PREFIX = "model_last_step"
SUPER_RES_UNET_LAST_STEP_CONFIG = {
"sample_size": 256,
"layers_per_block": 3,
"down_block_types": (
"ResnetDownsampleBlock2D",
"ResnetDownsampleBlock2D",
"ResnetDownsampleBlock2D",
"ResnetDownsampleBlock2D",
),
"up_block_types": (
"ResnetUpsampleBlock2D",
"ResnetUpsampleBlock2D",
"ResnetUpsampleBlock2D",
"ResnetUpsampleBlock2D",
),
"block_out_channels": (320, 640, 960, 1280),
"in_channels": 6,
"out_channels": 3,
"add_attention": False,
}
def super_res_unet_last_step_model_from_original_config():
model = UNet2DModel(**SUPER_RES_UNET_LAST_STEP_CONFIG)
return model
def super_res_unet_last_step_original_checkpoint_to_diffusers_checkpoint(model, checkpoint):
diffusers_checkpoint = {}
original_unet_prefix = SUPER_RES_UNET_LAST_STEP_PREFIX
diffusers_checkpoint.update(unet_time_embeddings(checkpoint, original_unet_prefix))
diffusers_checkpoint.update(unet_conv_in(checkpoint, original_unet_prefix))
# <original>.input_blocks -> <diffusers>.down_blocks
original_down_block_idx = 1
for diffusers_down_block_idx in range(len(model.down_blocks)):
checkpoint_update, num_original_down_blocks = unet_downblock_to_diffusers_checkpoint(
model,
checkpoint,
diffusers_down_block_idx=diffusers_down_block_idx,
original_down_block_idx=original_down_block_idx,
original_unet_prefix=original_unet_prefix,
num_head_channels=None,
)
original_down_block_idx += num_original_down_blocks
diffusers_checkpoint.update(checkpoint_update)
diffusers_checkpoint.update(
unet_midblock_to_diffusers_checkpoint(
model,
checkpoint,
original_unet_prefix=original_unet_prefix,
num_head_channels=None,
)
)
# <original>.output_blocks -> <diffusers>.up_blocks
original_up_block_idx = 0
for diffusers_up_block_idx in range(len(model.up_blocks)):
checkpoint_update, num_original_up_blocks = unet_upblock_to_diffusers_checkpoint(
model,
checkpoint,
diffusers_up_block_idx=diffusers_up_block_idx,
original_up_block_idx=original_up_block_idx,
original_unet_prefix=original_unet_prefix,
num_head_channels=None,
)
original_up_block_idx += num_original_up_blocks
diffusers_checkpoint.update(checkpoint_update)
# done <original>.output_blocks -> <diffusers>.up_blocks
diffusers_checkpoint.update(unet_conv_norm_out(checkpoint, original_unet_prefix))
diffusers_checkpoint.update(unet_conv_out(checkpoint, original_unet_prefix))
return diffusers_checkpoint
# done super res unet last step
# unet utils
# <original>.time_embed -> <diffusers>.time_embedding
def unet_time_embeddings(checkpoint, original_unet_prefix):
diffusers_checkpoint = {}
diffusers_checkpoint.update(
{
"time_embedding.linear_1.weight": checkpoint[f"{original_unet_prefix}.time_embed.0.weight"],
"time_embedding.linear_1.bias": checkpoint[f"{original_unet_prefix}.time_embed.0.bias"],
"time_embedding.linear_2.weight": checkpoint[f"{original_unet_prefix}.time_embed.2.weight"],
"time_embedding.linear_2.bias": checkpoint[f"{original_unet_prefix}.time_embed.2.bias"],
}
)
return diffusers_checkpoint
# <original>.input_blocks.0 -> <diffusers>.conv_in
def unet_conv_in(checkpoint, original_unet_prefix):
diffusers_checkpoint = {}
diffusers_checkpoint.update(
{
"conv_in.weight": checkpoint[f"{original_unet_prefix}.input_blocks.0.0.weight"],
"conv_in.bias": checkpoint[f"{original_unet_prefix}.input_blocks.0.0.bias"],
}
)
return diffusers_checkpoint
# <original>.out.0 -> <diffusers>.conv_norm_out
def unet_conv_norm_out(checkpoint, original_unet_prefix):
diffusers_checkpoint = {}
diffusers_checkpoint.update(
{
"conv_norm_out.weight": checkpoint[f"{original_unet_prefix}.out.0.weight"],
"conv_norm_out.bias": checkpoint[f"{original_unet_prefix}.out.0.bias"],
}
)
return diffusers_checkpoint
# <original>.out.2 -> <diffusers>.conv_out
def unet_conv_out(checkpoint, original_unet_prefix):
diffusers_checkpoint = {}
diffusers_checkpoint.update(
{
"conv_out.weight": checkpoint[f"{original_unet_prefix}.out.2.weight"],
"conv_out.bias": checkpoint[f"{original_unet_prefix}.out.2.bias"],
}
)
return diffusers_checkpoint
# <original>.input_blocks -> <diffusers>.down_blocks
def unet_downblock_to_diffusers_checkpoint(
model, checkpoint, *, diffusers_down_block_idx, original_down_block_idx, original_unet_prefix, num_head_channels
):
diffusers_checkpoint = {}
diffusers_resnet_prefix = f"down_blocks.{diffusers_down_block_idx}.resnets"
original_down_block_prefix = f"{original_unet_prefix}.input_blocks"
down_block = model.down_blocks[diffusers_down_block_idx]
num_resnets = len(down_block.resnets)
if down_block.downsamplers is None:
downsampler = False
else:
assert len(down_block.downsamplers) == 1
downsampler = True
# The downsample block is also a resnet
num_resnets += 1
for resnet_idx_inc in range(num_resnets):
full_resnet_prefix = f"{original_down_block_prefix}.{original_down_block_idx + resnet_idx_inc}.0"
if downsampler and resnet_idx_inc == num_resnets - 1:
# this is a downsample block
full_diffusers_resnet_prefix = f"down_blocks.{diffusers_down_block_idx}.downsamplers.0"
else:
# this is a regular resnet block
full_diffusers_resnet_prefix = f"{diffusers_resnet_prefix}.{resnet_idx_inc}"
diffusers_checkpoint.update(
resnet_to_diffusers_checkpoint(
checkpoint, resnet_prefix=full_resnet_prefix, diffusers_resnet_prefix=full_diffusers_resnet_prefix
)
)
if hasattr(down_block, "attentions"):
num_attentions = len(down_block.attentions)
diffusers_attention_prefix = f"down_blocks.{diffusers_down_block_idx}.attentions"
for attention_idx_inc in range(num_attentions):
full_attention_prefix = f"{original_down_block_prefix}.{original_down_block_idx + attention_idx_inc}.1"
full_diffusers_attention_prefix = f"{diffusers_attention_prefix}.{attention_idx_inc}"
diffusers_checkpoint.update(
attention_to_diffusers_checkpoint(
checkpoint,
attention_prefix=full_attention_prefix,
diffusers_attention_prefix=full_diffusers_attention_prefix,
num_head_channels=num_head_channels,
)
)
num_original_down_blocks = num_resnets
return diffusers_checkpoint, num_original_down_blocks
# <original>.middle_block -> <diffusers>.mid_block
def unet_midblock_to_diffusers_checkpoint(model, checkpoint, *, original_unet_prefix, num_head_channels):
diffusers_checkpoint = {}
# block 0
original_block_idx = 0
diffusers_checkpoint.update(
resnet_to_diffusers_checkpoint(
checkpoint,
diffusers_resnet_prefix="mid_block.resnets.0",
resnet_prefix=f"{original_unet_prefix}.middle_block.{original_block_idx}",
)
)
original_block_idx += 1
# optional block 1
if hasattr(model.mid_block, "attentions") and model.mid_block.attentions[0] is not None:
diffusers_checkpoint.update(
attention_to_diffusers_checkpoint(
checkpoint,
diffusers_attention_prefix="mid_block.attentions.0",
attention_prefix=f"{original_unet_prefix}.middle_block.{original_block_idx}",
num_head_channels=num_head_channels,
)
)
original_block_idx += 1
# block 1 or block 2
diffusers_checkpoint.update(
resnet_to_diffusers_checkpoint(
checkpoint,
diffusers_resnet_prefix="mid_block.resnets.1",
resnet_prefix=f"{original_unet_prefix}.middle_block.{original_block_idx}",
)
)
return diffusers_checkpoint
# <original>.output_blocks -> <diffusers>.up_blocks
def unet_upblock_to_diffusers_checkpoint(
model, checkpoint, *, diffusers_up_block_idx, original_up_block_idx, original_unet_prefix, num_head_channels
):
diffusers_checkpoint = {}
diffusers_resnet_prefix = f"up_blocks.{diffusers_up_block_idx}.resnets"
original_up_block_prefix = f"{original_unet_prefix}.output_blocks"
up_block = model.up_blocks[diffusers_up_block_idx]
num_resnets = len(up_block.resnets)
if up_block.upsamplers is None:
upsampler = False
else:
assert len(up_block.upsamplers) == 1
upsampler = True
# The upsample block is also a resnet
num_resnets += 1
has_attentions = hasattr(up_block, "attentions")
for resnet_idx_inc in range(num_resnets):
if upsampler and resnet_idx_inc == num_resnets - 1:
# this is an upsample block
if has_attentions:
# There is a middle attention block that we skip
original_resnet_block_idx = 2
else:
original_resnet_block_idx = 1
# we add the `minus 1` because the last two resnets are stuck together in the same output block
full_resnet_prefix = (
f"{original_up_block_prefix}.{original_up_block_idx + resnet_idx_inc - 1}.{original_resnet_block_idx}"
)
full_diffusers_resnet_prefix = f"up_blocks.{diffusers_up_block_idx}.upsamplers.0"
else:
# this is a regular resnet block
full_resnet_prefix = f"{original_up_block_prefix}.{original_up_block_idx + resnet_idx_inc}.0"
full_diffusers_resnet_prefix = f"{diffusers_resnet_prefix}.{resnet_idx_inc}"
diffusers_checkpoint.update(
resnet_to_diffusers_checkpoint(
checkpoint, resnet_prefix=full_resnet_prefix, diffusers_resnet_prefix=full_diffusers_resnet_prefix
)
)
if has_attentions:
num_attentions = len(up_block.attentions)
diffusers_attention_prefix = f"up_blocks.{diffusers_up_block_idx}.attentions"
for attention_idx_inc in range(num_attentions):
full_attention_prefix = f"{original_up_block_prefix}.{original_up_block_idx + attention_idx_inc}.1"
full_diffusers_attention_prefix = f"{diffusers_attention_prefix}.{attention_idx_inc}"
diffusers_checkpoint.update(
attention_to_diffusers_checkpoint(
checkpoint,
attention_prefix=full_attention_prefix,
diffusers_attention_prefix=full_diffusers_attention_prefix,
num_head_channels=num_head_channels,
)
)
num_original_down_blocks = num_resnets - 1 if upsampler else num_resnets
return diffusers_checkpoint, num_original_down_blocks
def resnet_to_diffusers_checkpoint(checkpoint, *, diffusers_resnet_prefix, resnet_prefix):
diffusers_checkpoint = {
f"{diffusers_resnet_prefix}.norm1.weight": checkpoint[f"{resnet_prefix}.in_layers.0.weight"],
f"{diffusers_resnet_prefix}.norm1.bias": checkpoint[f"{resnet_prefix}.in_layers.0.bias"],
f"{diffusers_resnet_prefix}.conv1.weight": checkpoint[f"{resnet_prefix}.in_layers.2.weight"],
f"{diffusers_resnet_prefix}.conv1.bias": checkpoint[f"{resnet_prefix}.in_layers.2.bias"],
f"{diffusers_resnet_prefix}.time_emb_proj.weight": checkpoint[f"{resnet_prefix}.emb_layers.1.weight"],
f"{diffusers_resnet_prefix}.time_emb_proj.bias": checkpoint[f"{resnet_prefix}.emb_layers.1.bias"],
f"{diffusers_resnet_prefix}.norm2.weight": checkpoint[f"{resnet_prefix}.out_layers.0.weight"],
f"{diffusers_resnet_prefix}.norm2.bias": checkpoint[f"{resnet_prefix}.out_layers.0.bias"],
f"{diffusers_resnet_prefix}.conv2.weight": checkpoint[f"{resnet_prefix}.out_layers.3.weight"],
f"{diffusers_resnet_prefix}.conv2.bias": checkpoint[f"{resnet_prefix}.out_layers.3.bias"],
}
skip_connection_prefix = f"{resnet_prefix}.skip_connection"
if f"{skip_connection_prefix}.weight" in checkpoint:
diffusers_checkpoint.update(
{
f"{diffusers_resnet_prefix}.conv_shortcut.weight": checkpoint[f"{skip_connection_prefix}.weight"],
f"{diffusers_resnet_prefix}.conv_shortcut.bias": checkpoint[f"{skip_connection_prefix}.bias"],
}
)
return diffusers_checkpoint
def attention_to_diffusers_checkpoint(checkpoint, *, diffusers_attention_prefix, attention_prefix, num_head_channels):
diffusers_checkpoint = {}
# <original>.norm -> <diffusers>.group_norm
diffusers_checkpoint.update(
{
f"{diffusers_attention_prefix}.group_norm.weight": checkpoint[f"{attention_prefix}.norm.weight"],
f"{diffusers_attention_prefix}.group_norm.bias": checkpoint[f"{attention_prefix}.norm.bias"],
}
)
# <original>.qkv -> <diffusers>.{query, key, value}
[q_weight, k_weight, v_weight], [q_bias, k_bias, v_bias] = split_attentions(
weight=checkpoint[f"{attention_prefix}.qkv.weight"][:, :, 0],
bias=checkpoint[f"{attention_prefix}.qkv.bias"],
split=3,
chunk_size=num_head_channels,
)
diffusers_checkpoint.update(
{
f"{diffusers_attention_prefix}.to_q.weight": q_weight,
f"{diffusers_attention_prefix}.to_q.bias": q_bias,
f"{diffusers_attention_prefix}.to_k.weight": k_weight,
f"{diffusers_attention_prefix}.to_k.bias": k_bias,
f"{diffusers_attention_prefix}.to_v.weight": v_weight,
f"{diffusers_attention_prefix}.to_v.bias": v_bias,
}
)
# <original>.encoder_kv -> <diffusers>.{context_key, context_value}
[encoder_k_weight, encoder_v_weight], [encoder_k_bias, encoder_v_bias] = split_attentions(
weight=checkpoint[f"{attention_prefix}.encoder_kv.weight"][:, :, 0],
bias=checkpoint[f"{attention_prefix}.encoder_kv.bias"],
split=2,
chunk_size=num_head_channels,
)
diffusers_checkpoint.update(
{
f"{diffusers_attention_prefix}.add_k_proj.weight": encoder_k_weight,
f"{diffusers_attention_prefix}.add_k_proj.bias": encoder_k_bias,
f"{diffusers_attention_prefix}.add_v_proj.weight": encoder_v_weight,
f"{diffusers_attention_prefix}.add_v_proj.bias": encoder_v_bias,
}
)
# <original>.proj_out (1d conv) -> <diffusers>.proj_attn (linear)
diffusers_checkpoint.update(
{
f"{diffusers_attention_prefix}.to_out.0.weight": checkpoint[f"{attention_prefix}.proj_out.weight"][
:, :, 0
],
f"{diffusers_attention_prefix}.to_out.0.bias": checkpoint[f"{attention_prefix}.proj_out.bias"],
}
)
return diffusers_checkpoint
# TODO maybe document and/or can do more efficiently (build indices in for loop and extract once for each split?)
def split_attentions(*, weight, bias, split, chunk_size):
weights = [None] * split
biases = [None] * split
weights_biases_idx = 0
for starting_row_index in range(0, weight.shape[0], chunk_size):
row_indices = torch.arange(starting_row_index, starting_row_index + chunk_size)
weight_rows = weight[row_indices, :]
bias_rows = bias[row_indices]
if weights[weights_biases_idx] is None:
assert weights[weights_biases_idx] is None
weights[weights_biases_idx] = weight_rows
biases[weights_biases_idx] = bias_rows
else:
assert weights[weights_biases_idx] is not None
weights[weights_biases_idx] = torch.concat([weights[weights_biases_idx], weight_rows])
biases[weights_biases_idx] = torch.concat([biases[weights_biases_idx], bias_rows])
weights_biases_idx = (weights_biases_idx + 1) % split
return weights, biases
# done unet utils
# Driver functions
def text_encoder():
print("loading CLIP text encoder")
clip_name = "openai/clip-vit-large-patch14"
# sets pad_value to 0
pad_token = "!"
tokenizer_model = CLIPTokenizer.from_pretrained(clip_name, pad_token=pad_token, device_map="auto")
assert tokenizer_model.convert_tokens_to_ids(pad_token) == 0
text_encoder_model = CLIPTextModelWithProjection.from_pretrained(
clip_name,
# `CLIPTextModel` does not support device_map="auto"
# device_map="auto"
)
print("done loading CLIP text encoder")
return text_encoder_model, tokenizer_model
def prior(*, args, checkpoint_map_location):
print("loading prior")
prior_checkpoint = torch.load(args.prior_checkpoint_path, map_location=checkpoint_map_location)
prior_checkpoint = prior_checkpoint["state_dict"]
clip_stats_checkpoint = torch.load(args.clip_stat_path, map_location=checkpoint_map_location)
prior_model = prior_model_from_original_config()
prior_diffusers_checkpoint = prior_original_checkpoint_to_diffusers_checkpoint(
prior_model, prior_checkpoint, clip_stats_checkpoint
)
del prior_checkpoint
del clip_stats_checkpoint
load_checkpoint_to_model(prior_diffusers_checkpoint, prior_model, strict=True)
print("done loading prior")
return prior_model
def decoder(*, args, checkpoint_map_location):
print("loading decoder")
decoder_checkpoint = torch.load(args.decoder_checkpoint_path, map_location=checkpoint_map_location)
decoder_checkpoint = decoder_checkpoint["state_dict"]
decoder_model = decoder_model_from_original_config()
decoder_diffusers_checkpoint = decoder_original_checkpoint_to_diffusers_checkpoint(
decoder_model, decoder_checkpoint
)
# text proj interlude
# The original decoder implementation includes a set of parameters that are used
# for creating the `encoder_hidden_states` which are what the U-net is conditioned
# on. The diffusers conditional unet directly takes the encoder_hidden_states. We pull
# the parameters into the UnCLIPTextProjModel class
text_proj_model = text_proj_from_original_config()
text_proj_checkpoint = text_proj_original_checkpoint_to_diffusers_checkpoint(decoder_checkpoint)
load_checkpoint_to_model(text_proj_checkpoint, text_proj_model, strict=True)
# done text proj interlude
del decoder_checkpoint
load_checkpoint_to_model(decoder_diffusers_checkpoint, decoder_model, strict=True)
print("done loading decoder")
return decoder_model, text_proj_model
def super_res_unet(*, args, checkpoint_map_location):
print("loading super resolution unet")
super_res_checkpoint = torch.load(args.super_res_unet_checkpoint_path, map_location=checkpoint_map_location)
super_res_checkpoint = super_res_checkpoint["state_dict"]
# model_first_steps
super_res_first_model = super_res_unet_first_steps_model_from_original_config()
super_res_first_steps_checkpoint = super_res_unet_first_steps_original_checkpoint_to_diffusers_checkpoint(
super_res_first_model, super_res_checkpoint
)
# model_last_step
super_res_last_model = super_res_unet_last_step_model_from_original_config()
super_res_last_step_checkpoint = super_res_unet_last_step_original_checkpoint_to_diffusers_checkpoint(
super_res_last_model, super_res_checkpoint
)
del super_res_checkpoint
load_checkpoint_to_model(super_res_first_steps_checkpoint, super_res_first_model, strict=True)
load_checkpoint_to_model(super_res_last_step_checkpoint, super_res_last_model, strict=True)
print("done loading super resolution unet")
return super_res_first_model, super_res_last_model
def load_checkpoint_to_model(checkpoint, model, strict=False):
with tempfile.NamedTemporaryFile() as file:
torch.save(checkpoint, file.name)
del checkpoint
if strict:
model.load_state_dict(torch.load(file.name), strict=True)
else:
load_checkpoint_and_dispatch(model, file.name, device_map="auto")
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument("--dump_path", default=None, type=str, required=True, help="Path to the output model.")
parser.add_argument(
"--prior_checkpoint_path",
default=None,
type=str,
required=True,
help="Path to the prior checkpoint to convert.",
)
parser.add_argument(
"--decoder_checkpoint_path",
default=None,
type=str,
required=True,
help="Path to the decoder checkpoint to convert.",
)
parser.add_argument(
"--super_res_unet_checkpoint_path",
default=None,
type=str,
required=True,
help="Path to the super resolution checkpoint to convert.",
)
parser.add_argument(
"--clip_stat_path", default=None, type=str, required=True, help="Path to the clip stats checkpoint to convert."
)
parser.add_argument(
"--checkpoint_load_device",
default="cpu",
type=str,
required=False,
help="The device passed to `map_location` when loading checkpoints.",
)
parser.add_argument(
"--debug",
default=None,
type=str,
required=False,
help="Only run a specific stage of the convert script. Used for debugging",
)
args = parser.parse_args()
print(f"loading checkpoints to {args.checkpoint_load_device}")
checkpoint_map_location = torch.device(args.checkpoint_load_device)
if args.debug is not None:
print(f"debug: only executing {args.debug}")
if args.debug is None:
text_encoder_model, tokenizer_model = text_encoder()
prior_model = prior(args=args, checkpoint_map_location=checkpoint_map_location)
decoder_model, text_proj_model = decoder(args=args, checkpoint_map_location=checkpoint_map_location)
super_res_first_model, super_res_last_model = super_res_unet(
args=args, checkpoint_map_location=checkpoint_map_location
)
prior_scheduler = UnCLIPScheduler(
variance_type="fixed_small_log",
prediction_type="sample",
num_train_timesteps=1000,
clip_sample_range=5.0,
)
decoder_scheduler = UnCLIPScheduler(
variance_type="learned_range",
prediction_type="epsilon",
num_train_timesteps=1000,
)
super_res_scheduler = UnCLIPScheduler(
variance_type="fixed_small_log",
prediction_type="epsilon",
num_train_timesteps=1000,
)
print(f"saving Kakao Brain unCLIP to {args.dump_path}")
pipe = UnCLIPPipeline(
prior=prior_model,
decoder=decoder_model,
text_proj=text_proj_model,
tokenizer=tokenizer_model,
text_encoder=text_encoder_model,
super_res_first=super_res_first_model,
super_res_last=super_res_last_model,
prior_scheduler=prior_scheduler,
decoder_scheduler=decoder_scheduler,
super_res_scheduler=super_res_scheduler,
)
pipe.save_pretrained(args.dump_path)
print("done writing Kakao Brain unCLIP")
elif args.debug == "text_encoder":
text_encoder_model, tokenizer_model = text_encoder()
elif args.debug == "prior":
prior_model = prior(args=args, checkpoint_map_location=checkpoint_map_location)
elif args.debug == "decoder":
decoder_model, text_proj_model = decoder(args=args, checkpoint_map_location=checkpoint_map_location)
elif args.debug == "super_res_unet":
super_res_first_model, super_res_last_model = super_res_unet(
args=args, checkpoint_map_location=checkpoint_map_location
)
else:
raise ValueError(f"unknown debug value : {args.debug}")
| 0 |
hf_public_repos/diffusers | hf_public_repos/diffusers/scripts/convert_lora_safetensor_to_diffusers.py | # coding=utf-8
# Copyright 2023, Haofan Wang, Qixun Wang, All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
""" Conversion script for the LoRA's safetensors checkpoints. """
import argparse
import torch
from safetensors.torch import load_file
from diffusers import StableDiffusionPipeline
def convert(base_model_path, checkpoint_path, LORA_PREFIX_UNET, LORA_PREFIX_TEXT_ENCODER, alpha):
# load base model
pipeline = StableDiffusionPipeline.from_pretrained(base_model_path, torch_dtype=torch.float32)
# load LoRA weight from .safetensors
state_dict = load_file(checkpoint_path)
visited = []
# directly update weight in diffusers model
for key in state_dict:
# it is suggested to print out the key, it usually will be something like below
# "lora_te_text_model_encoder_layers_0_self_attn_k_proj.lora_down.weight"
# as we have set the alpha beforehand, so just skip
if ".alpha" in key or key in visited:
continue
if "text" in key:
layer_infos = key.split(".")[0].split(LORA_PREFIX_TEXT_ENCODER + "_")[-1].split("_")
curr_layer = pipeline.text_encoder
else:
layer_infos = key.split(".")[0].split(LORA_PREFIX_UNET + "_")[-1].split("_")
curr_layer = pipeline.unet
# find the target layer
temp_name = layer_infos.pop(0)
while len(layer_infos) > -1:
try:
curr_layer = curr_layer.__getattr__(temp_name)
if len(layer_infos) > 0:
temp_name = layer_infos.pop(0)
elif len(layer_infos) == 0:
break
except Exception:
if len(temp_name) > 0:
temp_name += "_" + layer_infos.pop(0)
else:
temp_name = layer_infos.pop(0)
pair_keys = []
if "lora_down" in key:
pair_keys.append(key.replace("lora_down", "lora_up"))
pair_keys.append(key)
else:
pair_keys.append(key)
pair_keys.append(key.replace("lora_up", "lora_down"))
# update weight
if len(state_dict[pair_keys[0]].shape) == 4:
weight_up = state_dict[pair_keys[0]].squeeze(3).squeeze(2).to(torch.float32)
weight_down = state_dict[pair_keys[1]].squeeze(3).squeeze(2).to(torch.float32)
curr_layer.weight.data += alpha * torch.mm(weight_up, weight_down).unsqueeze(2).unsqueeze(3)
else:
weight_up = state_dict[pair_keys[0]].to(torch.float32)
weight_down = state_dict[pair_keys[1]].to(torch.float32)
curr_layer.weight.data += alpha * torch.mm(weight_up, weight_down)
# update visited list
for item in pair_keys:
visited.append(item)
return pipeline
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument(
"--base_model_path", default=None, type=str, required=True, help="Path to the base model in diffusers format."
)
parser.add_argument(
"--checkpoint_path", default=None, type=str, required=True, help="Path to the checkpoint to convert."
)
parser.add_argument("--dump_path", default=None, type=str, required=True, help="Path to the output model.")
parser.add_argument(
"--lora_prefix_unet", default="lora_unet", type=str, help="The prefix of UNet weight in safetensors"
)
parser.add_argument(
"--lora_prefix_text_encoder",
default="lora_te",
type=str,
help="The prefix of text encoder weight in safetensors",
)
parser.add_argument("--alpha", default=0.75, type=float, help="The merging ratio in W = W0 + alpha * deltaW")
parser.add_argument(
"--to_safetensors", action="store_true", help="Whether to store pipeline in safetensors format or not."
)
parser.add_argument("--device", type=str, help="Device to use (e.g. cpu, cuda:0, cuda:1, etc.)")
args = parser.parse_args()
base_model_path = args.base_model_path
checkpoint_path = args.checkpoint_path
dump_path = args.dump_path
lora_prefix_unet = args.lora_prefix_unet
lora_prefix_text_encoder = args.lora_prefix_text_encoder
alpha = args.alpha
pipe = convert(base_model_path, checkpoint_path, lora_prefix_unet, lora_prefix_text_encoder, alpha)
pipe = pipe.to(args.device)
pipe.save_pretrained(args.dump_path, safe_serialization=args.to_safetensors)
| 0 |
hf_public_repos/diffusers | hf_public_repos/diffusers/scripts/convert_ncsnpp_original_checkpoint_to_diffusers.py | # coding=utf-8
# Copyright 2023 The HuggingFace Inc. team.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
""" Conversion script for the NCSNPP checkpoints. """
import argparse
import json
import torch
from diffusers import ScoreSdeVePipeline, ScoreSdeVeScheduler, UNet2DModel
def convert_ncsnpp_checkpoint(checkpoint, config):
"""
Takes a state dict and the path to
"""
new_model_architecture = UNet2DModel(**config)
new_model_architecture.time_proj.W.data = checkpoint["all_modules.0.W"].data
new_model_architecture.time_proj.weight.data = checkpoint["all_modules.0.W"].data
new_model_architecture.time_embedding.linear_1.weight.data = checkpoint["all_modules.1.weight"].data
new_model_architecture.time_embedding.linear_1.bias.data = checkpoint["all_modules.1.bias"].data
new_model_architecture.time_embedding.linear_2.weight.data = checkpoint["all_modules.2.weight"].data
new_model_architecture.time_embedding.linear_2.bias.data = checkpoint["all_modules.2.bias"].data
new_model_architecture.conv_in.weight.data = checkpoint["all_modules.3.weight"].data
new_model_architecture.conv_in.bias.data = checkpoint["all_modules.3.bias"].data
new_model_architecture.conv_norm_out.weight.data = checkpoint[list(checkpoint.keys())[-4]].data
new_model_architecture.conv_norm_out.bias.data = checkpoint[list(checkpoint.keys())[-3]].data
new_model_architecture.conv_out.weight.data = checkpoint[list(checkpoint.keys())[-2]].data
new_model_architecture.conv_out.bias.data = checkpoint[list(checkpoint.keys())[-1]].data
module_index = 4
def set_attention_weights(new_layer, old_checkpoint, index):
new_layer.query.weight.data = old_checkpoint[f"all_modules.{index}.NIN_0.W"].data.T
new_layer.key.weight.data = old_checkpoint[f"all_modules.{index}.NIN_1.W"].data.T
new_layer.value.weight.data = old_checkpoint[f"all_modules.{index}.NIN_2.W"].data.T
new_layer.query.bias.data = old_checkpoint[f"all_modules.{index}.NIN_0.b"].data
new_layer.key.bias.data = old_checkpoint[f"all_modules.{index}.NIN_1.b"].data
new_layer.value.bias.data = old_checkpoint[f"all_modules.{index}.NIN_2.b"].data
new_layer.proj_attn.weight.data = old_checkpoint[f"all_modules.{index}.NIN_3.W"].data.T
new_layer.proj_attn.bias.data = old_checkpoint[f"all_modules.{index}.NIN_3.b"].data
new_layer.group_norm.weight.data = old_checkpoint[f"all_modules.{index}.GroupNorm_0.weight"].data
new_layer.group_norm.bias.data = old_checkpoint[f"all_modules.{index}.GroupNorm_0.bias"].data
def set_resnet_weights(new_layer, old_checkpoint, index):
new_layer.conv1.weight.data = old_checkpoint[f"all_modules.{index}.Conv_0.weight"].data
new_layer.conv1.bias.data = old_checkpoint[f"all_modules.{index}.Conv_0.bias"].data
new_layer.norm1.weight.data = old_checkpoint[f"all_modules.{index}.GroupNorm_0.weight"].data
new_layer.norm1.bias.data = old_checkpoint[f"all_modules.{index}.GroupNorm_0.bias"].data
new_layer.conv2.weight.data = old_checkpoint[f"all_modules.{index}.Conv_1.weight"].data
new_layer.conv2.bias.data = old_checkpoint[f"all_modules.{index}.Conv_1.bias"].data
new_layer.norm2.weight.data = old_checkpoint[f"all_modules.{index}.GroupNorm_1.weight"].data
new_layer.norm2.bias.data = old_checkpoint[f"all_modules.{index}.GroupNorm_1.bias"].data
new_layer.time_emb_proj.weight.data = old_checkpoint[f"all_modules.{index}.Dense_0.weight"].data
new_layer.time_emb_proj.bias.data = old_checkpoint[f"all_modules.{index}.Dense_0.bias"].data
if new_layer.in_channels != new_layer.out_channels or new_layer.up or new_layer.down:
new_layer.conv_shortcut.weight.data = old_checkpoint[f"all_modules.{index}.Conv_2.weight"].data
new_layer.conv_shortcut.bias.data = old_checkpoint[f"all_modules.{index}.Conv_2.bias"].data
for i, block in enumerate(new_model_architecture.downsample_blocks):
has_attentions = hasattr(block, "attentions")
for j in range(len(block.resnets)):
set_resnet_weights(block.resnets[j], checkpoint, module_index)
module_index += 1
if has_attentions:
set_attention_weights(block.attentions[j], checkpoint, module_index)
module_index += 1
if hasattr(block, "downsamplers") and block.downsamplers is not None:
set_resnet_weights(block.resnet_down, checkpoint, module_index)
module_index += 1
block.skip_conv.weight.data = checkpoint[f"all_modules.{module_index}.Conv_0.weight"].data
block.skip_conv.bias.data = checkpoint[f"all_modules.{module_index}.Conv_0.bias"].data
module_index += 1
set_resnet_weights(new_model_architecture.mid_block.resnets[0], checkpoint, module_index)
module_index += 1
set_attention_weights(new_model_architecture.mid_block.attentions[0], checkpoint, module_index)
module_index += 1
set_resnet_weights(new_model_architecture.mid_block.resnets[1], checkpoint, module_index)
module_index += 1
for i, block in enumerate(new_model_architecture.up_blocks):
has_attentions = hasattr(block, "attentions")
for j in range(len(block.resnets)):
set_resnet_weights(block.resnets[j], checkpoint, module_index)
module_index += 1
if has_attentions:
set_attention_weights(
block.attentions[0], checkpoint, module_index
) # why can there only be a single attention layer for up?
module_index += 1
if hasattr(block, "resnet_up") and block.resnet_up is not None:
block.skip_norm.weight.data = checkpoint[f"all_modules.{module_index}.weight"].data
block.skip_norm.bias.data = checkpoint[f"all_modules.{module_index}.bias"].data
module_index += 1
block.skip_conv.weight.data = checkpoint[f"all_modules.{module_index}.weight"].data
block.skip_conv.bias.data = checkpoint[f"all_modules.{module_index}.bias"].data
module_index += 1
set_resnet_weights(block.resnet_up, checkpoint, module_index)
module_index += 1
new_model_architecture.conv_norm_out.weight.data = checkpoint[f"all_modules.{module_index}.weight"].data
new_model_architecture.conv_norm_out.bias.data = checkpoint[f"all_modules.{module_index}.bias"].data
module_index += 1
new_model_architecture.conv_out.weight.data = checkpoint[f"all_modules.{module_index}.weight"].data
new_model_architecture.conv_out.bias.data = checkpoint[f"all_modules.{module_index}.bias"].data
return new_model_architecture.state_dict()
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument(
"--checkpoint_path",
default="/Users/arthurzucker/Work/diffusers/ArthurZ/diffusion_pytorch_model.bin",
type=str,
required=False,
help="Path to the checkpoint to convert.",
)
parser.add_argument(
"--config_file",
default="/Users/arthurzucker/Work/diffusers/ArthurZ/config.json",
type=str,
required=False,
help="The config json file corresponding to the architecture.",
)
parser.add_argument(
"--dump_path",
default="/Users/arthurzucker/Work/diffusers/ArthurZ/diffusion_model_new.pt",
type=str,
required=False,
help="Path to the output model.",
)
args = parser.parse_args()
checkpoint = torch.load(args.checkpoint_path, map_location="cpu")
with open(args.config_file) as f:
config = json.loads(f.read())
converted_checkpoint = convert_ncsnpp_checkpoint(
checkpoint,
config,
)
if "sde" in config:
del config["sde"]
model = UNet2DModel(**config)
model.load_state_dict(converted_checkpoint)
try:
scheduler = ScoreSdeVeScheduler.from_config("/".join(args.checkpoint_path.split("/")[:-1]))
pipe = ScoreSdeVePipeline(unet=model, scheduler=scheduler)
pipe.save_pretrained(args.dump_path)
except: # noqa: E722
model.save_pretrained(args.dump_path)
| 0 |
hf_public_repos/diffusers | hf_public_repos/diffusers/scripts/convert_vq_diffusion_to_diffusers.py | """
This script ports models from VQ-diffusion (https://github.com/microsoft/VQ-Diffusion) to diffusers.
It currently only supports porting the ITHQ dataset.
ITHQ dataset:
```sh
# From the root directory of diffusers.
# Download the VQVAE checkpoint
$ wget https://facevcstandard.blob.core.windows.net/v-zhictang/Improved-VQ-Diffusion_model_release/ithq_vqvae.pth?sv=2020-10-02&st=2022-05-30T15%3A17%3A18Z&se=2030-05-31T15%3A17%3A00Z&sr=b&sp=r&sig=1jVavHFPpUjDs%2FTO1V3PTezaNbPp2Nx8MxiWI7y6fEY%3D -O ithq_vqvae.pth
# Download the VQVAE config
# NOTE that in VQ-diffusion the documented file is `configs/ithq.yaml` but the target class
# `image_synthesis.modeling.codecs.image_codec.ema_vqvae.PatchVQVAE`
# loads `OUTPUT/pretrained_model/taming_dvae/config.yaml`
$ wget https://raw.githubusercontent.com/microsoft/VQ-Diffusion/main/OUTPUT/pretrained_model/taming_dvae/config.yaml -O ithq_vqvae.yaml
# Download the main model checkpoint
$ wget https://facevcstandard.blob.core.windows.net/v-zhictang/Improved-VQ-Diffusion_model_release/ithq_learnable.pth?sv=2020-10-02&st=2022-05-30T10%3A22%3A06Z&se=2030-05-31T10%3A22%3A00Z&sr=b&sp=r&sig=GOE%2Bza02%2FPnGxYVOOPtwrTR4RA3%2F5NVgMxdW4kjaEZ8%3D -O ithq_learnable.pth
# Download the main model config
$ wget https://raw.githubusercontent.com/microsoft/VQ-Diffusion/main/configs/ithq.yaml -O ithq.yaml
# run the convert script
$ python ./scripts/convert_vq_diffusion_to_diffusers.py \
--checkpoint_path ./ithq_learnable.pth \
--original_config_file ./ithq.yaml \
--vqvae_checkpoint_path ./ithq_vqvae.pth \
--vqvae_original_config_file ./ithq_vqvae.yaml \
--dump_path <path to save pre-trained `VQDiffusionPipeline`>
```
"""
import argparse
import tempfile
import torch
import yaml
from accelerate import init_empty_weights, load_checkpoint_and_dispatch
from transformers import CLIPTextModel, CLIPTokenizer
from yaml.loader import FullLoader
from diffusers import Transformer2DModel, VQDiffusionPipeline, VQDiffusionScheduler, VQModel
from diffusers.pipelines.vq_diffusion.pipeline_vq_diffusion import LearnedClassifierFreeSamplingEmbeddings
try:
from omegaconf import OmegaConf
except ImportError:
raise ImportError(
"OmegaConf is required to convert the VQ Diffusion checkpoints. Please install it with `pip install"
" OmegaConf`."
)
# vqvae model
PORTED_VQVAES = ["image_synthesis.modeling.codecs.image_codec.patch_vqgan.PatchVQGAN"]
def vqvae_model_from_original_config(original_config):
assert original_config.target in PORTED_VQVAES, f"{original_config.target} has not yet been ported to diffusers."
original_config = original_config.params
original_encoder_config = original_config.encoder_config.params
original_decoder_config = original_config.decoder_config.params
in_channels = original_encoder_config.in_channels
out_channels = original_decoder_config.out_ch
down_block_types = get_down_block_types(original_encoder_config)
up_block_types = get_up_block_types(original_decoder_config)
assert original_encoder_config.ch == original_decoder_config.ch
assert original_encoder_config.ch_mult == original_decoder_config.ch_mult
block_out_channels = tuple(
[original_encoder_config.ch * a_ch_mult for a_ch_mult in original_encoder_config.ch_mult]
)
assert original_encoder_config.num_res_blocks == original_decoder_config.num_res_blocks
layers_per_block = original_encoder_config.num_res_blocks
assert original_encoder_config.z_channels == original_decoder_config.z_channels
latent_channels = original_encoder_config.z_channels
num_vq_embeddings = original_config.n_embed
# Hard coded value for ResnetBlock.GoupNorm(num_groups) in VQ-diffusion
norm_num_groups = 32
e_dim = original_config.embed_dim
model = VQModel(
in_channels=in_channels,
out_channels=out_channels,
down_block_types=down_block_types,
up_block_types=up_block_types,
block_out_channels=block_out_channels,
layers_per_block=layers_per_block,
latent_channels=latent_channels,
num_vq_embeddings=num_vq_embeddings,
norm_num_groups=norm_num_groups,
vq_embed_dim=e_dim,
)
return model
def get_down_block_types(original_encoder_config):
attn_resolutions = coerce_attn_resolutions(original_encoder_config.attn_resolutions)
num_resolutions = len(original_encoder_config.ch_mult)
resolution = coerce_resolution(original_encoder_config.resolution)
curr_res = resolution
down_block_types = []
for _ in range(num_resolutions):
if curr_res in attn_resolutions:
down_block_type = "AttnDownEncoderBlock2D"
else:
down_block_type = "DownEncoderBlock2D"
down_block_types.append(down_block_type)
curr_res = [r // 2 for r in curr_res]
return down_block_types
def get_up_block_types(original_decoder_config):
attn_resolutions = coerce_attn_resolutions(original_decoder_config.attn_resolutions)
num_resolutions = len(original_decoder_config.ch_mult)
resolution = coerce_resolution(original_decoder_config.resolution)
curr_res = [r // 2 ** (num_resolutions - 1) for r in resolution]
up_block_types = []
for _ in reversed(range(num_resolutions)):
if curr_res in attn_resolutions:
up_block_type = "AttnUpDecoderBlock2D"
else:
up_block_type = "UpDecoderBlock2D"
up_block_types.append(up_block_type)
curr_res = [r * 2 for r in curr_res]
return up_block_types
def coerce_attn_resolutions(attn_resolutions):
attn_resolutions = OmegaConf.to_object(attn_resolutions)
attn_resolutions_ = []
for ar in attn_resolutions:
if isinstance(ar, (list, tuple)):
attn_resolutions_.append(list(ar))
else:
attn_resolutions_.append([ar, ar])
return attn_resolutions_
def coerce_resolution(resolution):
resolution = OmegaConf.to_object(resolution)
if isinstance(resolution, int):
resolution = [resolution, resolution] # H, W
elif isinstance(resolution, (tuple, list)):
resolution = list(resolution)
else:
raise ValueError("Unknown type of resolution:", resolution)
return resolution
# done vqvae model
# vqvae checkpoint
def vqvae_original_checkpoint_to_diffusers_checkpoint(model, checkpoint):
diffusers_checkpoint = {}
diffusers_checkpoint.update(vqvae_encoder_to_diffusers_checkpoint(model, checkpoint))
# quant_conv
diffusers_checkpoint.update(
{
"quant_conv.weight": checkpoint["quant_conv.weight"],
"quant_conv.bias": checkpoint["quant_conv.bias"],
}
)
# quantize
diffusers_checkpoint.update({"quantize.embedding.weight": checkpoint["quantize.embedding"]})
# post_quant_conv
diffusers_checkpoint.update(
{
"post_quant_conv.weight": checkpoint["post_quant_conv.weight"],
"post_quant_conv.bias": checkpoint["post_quant_conv.bias"],
}
)
# decoder
diffusers_checkpoint.update(vqvae_decoder_to_diffusers_checkpoint(model, checkpoint))
return diffusers_checkpoint
def vqvae_encoder_to_diffusers_checkpoint(model, checkpoint):
diffusers_checkpoint = {}
# conv_in
diffusers_checkpoint.update(
{
"encoder.conv_in.weight": checkpoint["encoder.conv_in.weight"],
"encoder.conv_in.bias": checkpoint["encoder.conv_in.bias"],
}
)
# down_blocks
for down_block_idx, down_block in enumerate(model.encoder.down_blocks):
diffusers_down_block_prefix = f"encoder.down_blocks.{down_block_idx}"
down_block_prefix = f"encoder.down.{down_block_idx}"
# resnets
for resnet_idx, resnet in enumerate(down_block.resnets):
diffusers_resnet_prefix = f"{diffusers_down_block_prefix}.resnets.{resnet_idx}"
resnet_prefix = f"{down_block_prefix}.block.{resnet_idx}"
diffusers_checkpoint.update(
vqvae_resnet_to_diffusers_checkpoint(
resnet, checkpoint, diffusers_resnet_prefix=diffusers_resnet_prefix, resnet_prefix=resnet_prefix
)
)
# downsample
# do not include the downsample when on the last down block
# There is no downsample on the last down block
if down_block_idx != len(model.encoder.down_blocks) - 1:
# There's a single downsample in the original checkpoint but a list of downsamples
# in the diffusers model.
diffusers_downsample_prefix = f"{diffusers_down_block_prefix}.downsamplers.0.conv"
downsample_prefix = f"{down_block_prefix}.downsample.conv"
diffusers_checkpoint.update(
{
f"{diffusers_downsample_prefix}.weight": checkpoint[f"{downsample_prefix}.weight"],
f"{diffusers_downsample_prefix}.bias": checkpoint[f"{downsample_prefix}.bias"],
}
)
# attentions
if hasattr(down_block, "attentions"):
for attention_idx, _ in enumerate(down_block.attentions):
diffusers_attention_prefix = f"{diffusers_down_block_prefix}.attentions.{attention_idx}"
attention_prefix = f"{down_block_prefix}.attn.{attention_idx}"
diffusers_checkpoint.update(
vqvae_attention_to_diffusers_checkpoint(
checkpoint,
diffusers_attention_prefix=diffusers_attention_prefix,
attention_prefix=attention_prefix,
)
)
# mid block
# mid block attentions
# There is a single hardcoded attention block in the middle of the VQ-diffusion encoder
diffusers_attention_prefix = "encoder.mid_block.attentions.0"
attention_prefix = "encoder.mid.attn_1"
diffusers_checkpoint.update(
vqvae_attention_to_diffusers_checkpoint(
checkpoint, diffusers_attention_prefix=diffusers_attention_prefix, attention_prefix=attention_prefix
)
)
# mid block resnets
for diffusers_resnet_idx, resnet in enumerate(model.encoder.mid_block.resnets):
diffusers_resnet_prefix = f"encoder.mid_block.resnets.{diffusers_resnet_idx}"
# the hardcoded prefixes to `block_` are 1 and 2
orig_resnet_idx = diffusers_resnet_idx + 1
# There are two hardcoded resnets in the middle of the VQ-diffusion encoder
resnet_prefix = f"encoder.mid.block_{orig_resnet_idx}"
diffusers_checkpoint.update(
vqvae_resnet_to_diffusers_checkpoint(
resnet, checkpoint, diffusers_resnet_prefix=diffusers_resnet_prefix, resnet_prefix=resnet_prefix
)
)
diffusers_checkpoint.update(
{
# conv_norm_out
"encoder.conv_norm_out.weight": checkpoint["encoder.norm_out.weight"],
"encoder.conv_norm_out.bias": checkpoint["encoder.norm_out.bias"],
# conv_out
"encoder.conv_out.weight": checkpoint["encoder.conv_out.weight"],
"encoder.conv_out.bias": checkpoint["encoder.conv_out.bias"],
}
)
return diffusers_checkpoint
def vqvae_decoder_to_diffusers_checkpoint(model, checkpoint):
diffusers_checkpoint = {}
# conv in
diffusers_checkpoint.update(
{
"decoder.conv_in.weight": checkpoint["decoder.conv_in.weight"],
"decoder.conv_in.bias": checkpoint["decoder.conv_in.bias"],
}
)
# up_blocks
for diffusers_up_block_idx, up_block in enumerate(model.decoder.up_blocks):
# up_blocks are stored in reverse order in the VQ-diffusion checkpoint
orig_up_block_idx = len(model.decoder.up_blocks) - 1 - diffusers_up_block_idx
diffusers_up_block_prefix = f"decoder.up_blocks.{diffusers_up_block_idx}"
up_block_prefix = f"decoder.up.{orig_up_block_idx}"
# resnets
for resnet_idx, resnet in enumerate(up_block.resnets):
diffusers_resnet_prefix = f"{diffusers_up_block_prefix}.resnets.{resnet_idx}"
resnet_prefix = f"{up_block_prefix}.block.{resnet_idx}"
diffusers_checkpoint.update(
vqvae_resnet_to_diffusers_checkpoint(
resnet, checkpoint, diffusers_resnet_prefix=diffusers_resnet_prefix, resnet_prefix=resnet_prefix
)
)
# upsample
# there is no up sample on the last up block
if diffusers_up_block_idx != len(model.decoder.up_blocks) - 1:
# There's a single upsample in the VQ-diffusion checkpoint but a list of downsamples
# in the diffusers model.
diffusers_downsample_prefix = f"{diffusers_up_block_prefix}.upsamplers.0.conv"
downsample_prefix = f"{up_block_prefix}.upsample.conv"
diffusers_checkpoint.update(
{
f"{diffusers_downsample_prefix}.weight": checkpoint[f"{downsample_prefix}.weight"],
f"{diffusers_downsample_prefix}.bias": checkpoint[f"{downsample_prefix}.bias"],
}
)
# attentions
if hasattr(up_block, "attentions"):
for attention_idx, _ in enumerate(up_block.attentions):
diffusers_attention_prefix = f"{diffusers_up_block_prefix}.attentions.{attention_idx}"
attention_prefix = f"{up_block_prefix}.attn.{attention_idx}"
diffusers_checkpoint.update(
vqvae_attention_to_diffusers_checkpoint(
checkpoint,
diffusers_attention_prefix=diffusers_attention_prefix,
attention_prefix=attention_prefix,
)
)
# mid block
# mid block attentions
# There is a single hardcoded attention block in the middle of the VQ-diffusion decoder
diffusers_attention_prefix = "decoder.mid_block.attentions.0"
attention_prefix = "decoder.mid.attn_1"
diffusers_checkpoint.update(
vqvae_attention_to_diffusers_checkpoint(
checkpoint, diffusers_attention_prefix=diffusers_attention_prefix, attention_prefix=attention_prefix
)
)
# mid block resnets
for diffusers_resnet_idx, resnet in enumerate(model.encoder.mid_block.resnets):
diffusers_resnet_prefix = f"decoder.mid_block.resnets.{diffusers_resnet_idx}"
# the hardcoded prefixes to `block_` are 1 and 2
orig_resnet_idx = diffusers_resnet_idx + 1
# There are two hardcoded resnets in the middle of the VQ-diffusion decoder
resnet_prefix = f"decoder.mid.block_{orig_resnet_idx}"
diffusers_checkpoint.update(
vqvae_resnet_to_diffusers_checkpoint(
resnet, checkpoint, diffusers_resnet_prefix=diffusers_resnet_prefix, resnet_prefix=resnet_prefix
)
)
diffusers_checkpoint.update(
{
# conv_norm_out
"decoder.conv_norm_out.weight": checkpoint["decoder.norm_out.weight"],
"decoder.conv_norm_out.bias": checkpoint["decoder.norm_out.bias"],
# conv_out
"decoder.conv_out.weight": checkpoint["decoder.conv_out.weight"],
"decoder.conv_out.bias": checkpoint["decoder.conv_out.bias"],
}
)
return diffusers_checkpoint
def vqvae_resnet_to_diffusers_checkpoint(resnet, checkpoint, *, diffusers_resnet_prefix, resnet_prefix):
rv = {
# norm1
f"{diffusers_resnet_prefix}.norm1.weight": checkpoint[f"{resnet_prefix}.norm1.weight"],
f"{diffusers_resnet_prefix}.norm1.bias": checkpoint[f"{resnet_prefix}.norm1.bias"],
# conv1
f"{diffusers_resnet_prefix}.conv1.weight": checkpoint[f"{resnet_prefix}.conv1.weight"],
f"{diffusers_resnet_prefix}.conv1.bias": checkpoint[f"{resnet_prefix}.conv1.bias"],
# norm2
f"{diffusers_resnet_prefix}.norm2.weight": checkpoint[f"{resnet_prefix}.norm2.weight"],
f"{diffusers_resnet_prefix}.norm2.bias": checkpoint[f"{resnet_prefix}.norm2.bias"],
# conv2
f"{diffusers_resnet_prefix}.conv2.weight": checkpoint[f"{resnet_prefix}.conv2.weight"],
f"{diffusers_resnet_prefix}.conv2.bias": checkpoint[f"{resnet_prefix}.conv2.bias"],
}
if resnet.conv_shortcut is not None:
rv.update(
{
f"{diffusers_resnet_prefix}.conv_shortcut.weight": checkpoint[f"{resnet_prefix}.nin_shortcut.weight"],
f"{diffusers_resnet_prefix}.conv_shortcut.bias": checkpoint[f"{resnet_prefix}.nin_shortcut.bias"],
}
)
return rv
def vqvae_attention_to_diffusers_checkpoint(checkpoint, *, diffusers_attention_prefix, attention_prefix):
return {
# group_norm
f"{diffusers_attention_prefix}.group_norm.weight": checkpoint[f"{attention_prefix}.norm.weight"],
f"{diffusers_attention_prefix}.group_norm.bias": checkpoint[f"{attention_prefix}.norm.bias"],
# query
f"{diffusers_attention_prefix}.query.weight": checkpoint[f"{attention_prefix}.q.weight"][:, :, 0, 0],
f"{diffusers_attention_prefix}.query.bias": checkpoint[f"{attention_prefix}.q.bias"],
# key
f"{diffusers_attention_prefix}.key.weight": checkpoint[f"{attention_prefix}.k.weight"][:, :, 0, 0],
f"{diffusers_attention_prefix}.key.bias": checkpoint[f"{attention_prefix}.k.bias"],
# value
f"{diffusers_attention_prefix}.value.weight": checkpoint[f"{attention_prefix}.v.weight"][:, :, 0, 0],
f"{diffusers_attention_prefix}.value.bias": checkpoint[f"{attention_prefix}.v.bias"],
# proj_attn
f"{diffusers_attention_prefix}.proj_attn.weight": checkpoint[f"{attention_prefix}.proj_out.weight"][
:, :, 0, 0
],
f"{diffusers_attention_prefix}.proj_attn.bias": checkpoint[f"{attention_prefix}.proj_out.bias"],
}
# done vqvae checkpoint
# transformer model
PORTED_DIFFUSIONS = ["image_synthesis.modeling.transformers.diffusion_transformer.DiffusionTransformer"]
PORTED_TRANSFORMERS = ["image_synthesis.modeling.transformers.transformer_utils.Text2ImageTransformer"]
PORTED_CONTENT_EMBEDDINGS = ["image_synthesis.modeling.embeddings.dalle_mask_image_embedding.DalleMaskImageEmbedding"]
def transformer_model_from_original_config(
original_diffusion_config, original_transformer_config, original_content_embedding_config
):
assert (
original_diffusion_config.target in PORTED_DIFFUSIONS
), f"{original_diffusion_config.target} has not yet been ported to diffusers."
assert (
original_transformer_config.target in PORTED_TRANSFORMERS
), f"{original_transformer_config.target} has not yet been ported to diffusers."
assert (
original_content_embedding_config.target in PORTED_CONTENT_EMBEDDINGS
), f"{original_content_embedding_config.target} has not yet been ported to diffusers."
original_diffusion_config = original_diffusion_config.params
original_transformer_config = original_transformer_config.params
original_content_embedding_config = original_content_embedding_config.params
inner_dim = original_transformer_config["n_embd"]
n_heads = original_transformer_config["n_head"]
# VQ-Diffusion gives dimension of the multi-headed attention layers as the
# number of attention heads times the sequence length (the dimension) of a
# single head. We want to specify our attention blocks with those values
# specified separately
assert inner_dim % n_heads == 0
d_head = inner_dim // n_heads
depth = original_transformer_config["n_layer"]
context_dim = original_transformer_config["condition_dim"]
num_embed = original_content_embedding_config["num_embed"]
# the number of embeddings in the transformer includes the mask embedding.
# the content embedding (the vqvae) does not include the mask embedding.
num_embed = num_embed + 1
height = original_transformer_config["content_spatial_size"][0]
width = original_transformer_config["content_spatial_size"][1]
assert width == height, "width has to be equal to height"
dropout = original_transformer_config["resid_pdrop"]
num_embeds_ada_norm = original_diffusion_config["diffusion_step"]
model_kwargs = {
"attention_bias": True,
"cross_attention_dim": context_dim,
"attention_head_dim": d_head,
"num_layers": depth,
"dropout": dropout,
"num_attention_heads": n_heads,
"num_vector_embeds": num_embed,
"num_embeds_ada_norm": num_embeds_ada_norm,
"norm_num_groups": 32,
"sample_size": width,
"activation_fn": "geglu-approximate",
}
model = Transformer2DModel(**model_kwargs)
return model
# done transformer model
# transformer checkpoint
def transformer_original_checkpoint_to_diffusers_checkpoint(model, checkpoint):
diffusers_checkpoint = {}
transformer_prefix = "transformer.transformer"
diffusers_latent_image_embedding_prefix = "latent_image_embedding"
latent_image_embedding_prefix = f"{transformer_prefix}.content_emb"
# DalleMaskImageEmbedding
diffusers_checkpoint.update(
{
f"{diffusers_latent_image_embedding_prefix}.emb.weight": checkpoint[
f"{latent_image_embedding_prefix}.emb.weight"
],
f"{diffusers_latent_image_embedding_prefix}.height_emb.weight": checkpoint[
f"{latent_image_embedding_prefix}.height_emb.weight"
],
f"{diffusers_latent_image_embedding_prefix}.width_emb.weight": checkpoint[
f"{latent_image_embedding_prefix}.width_emb.weight"
],
}
)
# transformer blocks
for transformer_block_idx, transformer_block in enumerate(model.transformer_blocks):
diffusers_transformer_block_prefix = f"transformer_blocks.{transformer_block_idx}"
transformer_block_prefix = f"{transformer_prefix}.blocks.{transformer_block_idx}"
# ada norm block
diffusers_ada_norm_prefix = f"{diffusers_transformer_block_prefix}.norm1"
ada_norm_prefix = f"{transformer_block_prefix}.ln1"
diffusers_checkpoint.update(
transformer_ada_norm_to_diffusers_checkpoint(
checkpoint, diffusers_ada_norm_prefix=diffusers_ada_norm_prefix, ada_norm_prefix=ada_norm_prefix
)
)
# attention block
diffusers_attention_prefix = f"{diffusers_transformer_block_prefix}.attn1"
attention_prefix = f"{transformer_block_prefix}.attn1"
diffusers_checkpoint.update(
transformer_attention_to_diffusers_checkpoint(
checkpoint, diffusers_attention_prefix=diffusers_attention_prefix, attention_prefix=attention_prefix
)
)
# ada norm block
diffusers_ada_norm_prefix = f"{diffusers_transformer_block_prefix}.norm2"
ada_norm_prefix = f"{transformer_block_prefix}.ln1_1"
diffusers_checkpoint.update(
transformer_ada_norm_to_diffusers_checkpoint(
checkpoint, diffusers_ada_norm_prefix=diffusers_ada_norm_prefix, ada_norm_prefix=ada_norm_prefix
)
)
# attention block
diffusers_attention_prefix = f"{diffusers_transformer_block_prefix}.attn2"
attention_prefix = f"{transformer_block_prefix}.attn2"
diffusers_checkpoint.update(
transformer_attention_to_diffusers_checkpoint(
checkpoint, diffusers_attention_prefix=diffusers_attention_prefix, attention_prefix=attention_prefix
)
)
# norm block
diffusers_norm_block_prefix = f"{diffusers_transformer_block_prefix}.norm3"
norm_block_prefix = f"{transformer_block_prefix}.ln2"
diffusers_checkpoint.update(
{
f"{diffusers_norm_block_prefix}.weight": checkpoint[f"{norm_block_prefix}.weight"],
f"{diffusers_norm_block_prefix}.bias": checkpoint[f"{norm_block_prefix}.bias"],
}
)
# feedforward block
diffusers_feedforward_prefix = f"{diffusers_transformer_block_prefix}.ff"
feedforward_prefix = f"{transformer_block_prefix}.mlp"
diffusers_checkpoint.update(
transformer_feedforward_to_diffusers_checkpoint(
checkpoint,
diffusers_feedforward_prefix=diffusers_feedforward_prefix,
feedforward_prefix=feedforward_prefix,
)
)
# to logits
diffusers_norm_out_prefix = "norm_out"
norm_out_prefix = f"{transformer_prefix}.to_logits.0"
diffusers_checkpoint.update(
{
f"{diffusers_norm_out_prefix}.weight": checkpoint[f"{norm_out_prefix}.weight"],
f"{diffusers_norm_out_prefix}.bias": checkpoint[f"{norm_out_prefix}.bias"],
}
)
diffusers_out_prefix = "out"
out_prefix = f"{transformer_prefix}.to_logits.1"
diffusers_checkpoint.update(
{
f"{diffusers_out_prefix}.weight": checkpoint[f"{out_prefix}.weight"],
f"{diffusers_out_prefix}.bias": checkpoint[f"{out_prefix}.bias"],
}
)
return diffusers_checkpoint
def transformer_ada_norm_to_diffusers_checkpoint(checkpoint, *, diffusers_ada_norm_prefix, ada_norm_prefix):
return {
f"{diffusers_ada_norm_prefix}.emb.weight": checkpoint[f"{ada_norm_prefix}.emb.weight"],
f"{diffusers_ada_norm_prefix}.linear.weight": checkpoint[f"{ada_norm_prefix}.linear.weight"],
f"{diffusers_ada_norm_prefix}.linear.bias": checkpoint[f"{ada_norm_prefix}.linear.bias"],
}
def transformer_attention_to_diffusers_checkpoint(checkpoint, *, diffusers_attention_prefix, attention_prefix):
return {
# key
f"{diffusers_attention_prefix}.to_k.weight": checkpoint[f"{attention_prefix}.key.weight"],
f"{diffusers_attention_prefix}.to_k.bias": checkpoint[f"{attention_prefix}.key.bias"],
# query
f"{diffusers_attention_prefix}.to_q.weight": checkpoint[f"{attention_prefix}.query.weight"],
f"{diffusers_attention_prefix}.to_q.bias": checkpoint[f"{attention_prefix}.query.bias"],
# value
f"{diffusers_attention_prefix}.to_v.weight": checkpoint[f"{attention_prefix}.value.weight"],
f"{diffusers_attention_prefix}.to_v.bias": checkpoint[f"{attention_prefix}.value.bias"],
# linear out
f"{diffusers_attention_prefix}.to_out.0.weight": checkpoint[f"{attention_prefix}.proj.weight"],
f"{diffusers_attention_prefix}.to_out.0.bias": checkpoint[f"{attention_prefix}.proj.bias"],
}
def transformer_feedforward_to_diffusers_checkpoint(checkpoint, *, diffusers_feedforward_prefix, feedforward_prefix):
return {
f"{diffusers_feedforward_prefix}.net.0.proj.weight": checkpoint[f"{feedforward_prefix}.0.weight"],
f"{diffusers_feedforward_prefix}.net.0.proj.bias": checkpoint[f"{feedforward_prefix}.0.bias"],
f"{diffusers_feedforward_prefix}.net.2.weight": checkpoint[f"{feedforward_prefix}.2.weight"],
f"{diffusers_feedforward_prefix}.net.2.bias": checkpoint[f"{feedforward_prefix}.2.bias"],
}
# done transformer checkpoint
def read_config_file(filename):
# The yaml file contains annotations that certain values should
# loaded as tuples. By default, OmegaConf will panic when reading
# these. Instead, we can manually read the yaml with the FullLoader and then
# construct the OmegaConf object.
with open(filename) as f:
original_config = yaml.load(f, FullLoader)
return OmegaConf.create(original_config)
# We take separate arguments for the vqvae because the ITHQ vqvae config file
# is separate from the config file for the rest of the model.
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument(
"--vqvae_checkpoint_path",
default=None,
type=str,
required=True,
help="Path to the vqvae checkpoint to convert.",
)
parser.add_argument(
"--vqvae_original_config_file",
default=None,
type=str,
required=True,
help="The YAML config file corresponding to the original architecture for the vqvae.",
)
parser.add_argument(
"--checkpoint_path", default=None, type=str, required=True, help="Path to the checkpoint to convert."
)
parser.add_argument(
"--original_config_file",
default=None,
type=str,
required=True,
help="The YAML config file corresponding to the original architecture.",
)
parser.add_argument("--dump_path", default=None, type=str, required=True, help="Path to the output model.")
parser.add_argument(
"--checkpoint_load_device",
default="cpu",
type=str,
required=False,
help="The device passed to `map_location` when loading checkpoints.",
)
# See link for how ema weights are always selected
# https://github.com/microsoft/VQ-Diffusion/blob/3c98e77f721db7c787b76304fa2c96a36c7b00af/inference_VQ_Diffusion.py#L65
parser.add_argument(
"--no_use_ema",
action="store_true",
required=False,
help=(
"Set to not use the ema weights from the original VQ-Diffusion checkpoint. You probably do not want to set"
" it as the original VQ-Diffusion always uses the ema weights when loading models."
),
)
args = parser.parse_args()
use_ema = not args.no_use_ema
print(f"loading checkpoints to {args.checkpoint_load_device}")
checkpoint_map_location = torch.device(args.checkpoint_load_device)
# vqvae_model
print(f"loading vqvae, config: {args.vqvae_original_config_file}, checkpoint: {args.vqvae_checkpoint_path}")
vqvae_original_config = read_config_file(args.vqvae_original_config_file).model
vqvae_checkpoint = torch.load(args.vqvae_checkpoint_path, map_location=checkpoint_map_location)["model"]
with init_empty_weights():
vqvae_model = vqvae_model_from_original_config(vqvae_original_config)
vqvae_diffusers_checkpoint = vqvae_original_checkpoint_to_diffusers_checkpoint(vqvae_model, vqvae_checkpoint)
with tempfile.NamedTemporaryFile() as vqvae_diffusers_checkpoint_file:
torch.save(vqvae_diffusers_checkpoint, vqvae_diffusers_checkpoint_file.name)
del vqvae_diffusers_checkpoint
del vqvae_checkpoint
load_checkpoint_and_dispatch(vqvae_model, vqvae_diffusers_checkpoint_file.name, device_map="auto")
print("done loading vqvae")
# done vqvae_model
# transformer_model
print(
f"loading transformer, config: {args.original_config_file}, checkpoint: {args.checkpoint_path}, use ema:"
f" {use_ema}"
)
original_config = read_config_file(args.original_config_file).model
diffusion_config = original_config.params.diffusion_config
transformer_config = original_config.params.diffusion_config.params.transformer_config
content_embedding_config = original_config.params.diffusion_config.params.content_emb_config
pre_checkpoint = torch.load(args.checkpoint_path, map_location=checkpoint_map_location)
if use_ema:
if "ema" in pre_checkpoint:
checkpoint = {}
for k, v in pre_checkpoint["model"].items():
checkpoint[k] = v
for k, v in pre_checkpoint["ema"].items():
# The ema weights are only used on the transformer. To mimic their key as if they came
# from the state_dict for the top level model, we prefix with an additional "transformer."
# See the source linked in the args.use_ema config for more information.
checkpoint[f"transformer.{k}"] = v
else:
print("attempted to load ema weights but no ema weights are specified in the loaded checkpoint.")
checkpoint = pre_checkpoint["model"]
else:
checkpoint = pre_checkpoint["model"]
del pre_checkpoint
with init_empty_weights():
transformer_model = transformer_model_from_original_config(
diffusion_config, transformer_config, content_embedding_config
)
diffusers_transformer_checkpoint = transformer_original_checkpoint_to_diffusers_checkpoint(
transformer_model, checkpoint
)
# classifier free sampling embeddings interlude
# The learned embeddings are stored on the transformer in the original VQ-diffusion. We store them on a separate
# model, so we pull them off the checkpoint before the checkpoint is deleted.
learnable_classifier_free_sampling_embeddings = diffusion_config.params.learnable_cf
if learnable_classifier_free_sampling_embeddings:
learned_classifier_free_sampling_embeddings_embeddings = checkpoint["transformer.empty_text_embed"]
else:
learned_classifier_free_sampling_embeddings_embeddings = None
# done classifier free sampling embeddings interlude
with tempfile.NamedTemporaryFile() as diffusers_transformer_checkpoint_file:
torch.save(diffusers_transformer_checkpoint, diffusers_transformer_checkpoint_file.name)
del diffusers_transformer_checkpoint
del checkpoint
load_checkpoint_and_dispatch(transformer_model, diffusers_transformer_checkpoint_file.name, device_map="auto")
print("done loading transformer")
# done transformer_model
# text encoder
print("loading CLIP text encoder")
clip_name = "openai/clip-vit-base-patch32"
# The original VQ-Diffusion specifies the pad value by the int used in the
# returned tokens. Each model uses `0` as the pad value. The transformers clip api
# specifies the pad value via the token before it has been tokenized. The `!` pad
# token is the same as padding with the `0` pad value.
pad_token = "!"
tokenizer_model = CLIPTokenizer.from_pretrained(clip_name, pad_token=pad_token, device_map="auto")
assert tokenizer_model.convert_tokens_to_ids(pad_token) == 0
text_encoder_model = CLIPTextModel.from_pretrained(
clip_name,
# `CLIPTextModel` does not support device_map="auto"
# device_map="auto"
)
print("done loading CLIP text encoder")
# done text encoder
# scheduler
scheduler_model = VQDiffusionScheduler(
# the scheduler has the same number of embeddings as the transformer
num_vec_classes=transformer_model.num_vector_embeds
)
# done scheduler
# learned classifier free sampling embeddings
with init_empty_weights():
learned_classifier_free_sampling_embeddings_model = LearnedClassifierFreeSamplingEmbeddings(
learnable_classifier_free_sampling_embeddings,
hidden_size=text_encoder_model.config.hidden_size,
length=tokenizer_model.model_max_length,
)
learned_classifier_free_sampling_checkpoint = {
"embeddings": learned_classifier_free_sampling_embeddings_embeddings.float()
}
with tempfile.NamedTemporaryFile() as learned_classifier_free_sampling_checkpoint_file:
torch.save(learned_classifier_free_sampling_checkpoint, learned_classifier_free_sampling_checkpoint_file.name)
del learned_classifier_free_sampling_checkpoint
del learned_classifier_free_sampling_embeddings_embeddings
load_checkpoint_and_dispatch(
learned_classifier_free_sampling_embeddings_model,
learned_classifier_free_sampling_checkpoint_file.name,
device_map="auto",
)
# done learned classifier free sampling embeddings
print(f"saving VQ diffusion model, path: {args.dump_path}")
pipe = VQDiffusionPipeline(
vqvae=vqvae_model,
transformer=transformer_model,
tokenizer=tokenizer_model,
text_encoder=text_encoder_model,
learned_classifier_free_sampling_embeddings=learned_classifier_free_sampling_embeddings_model,
scheduler=scheduler_model,
)
pipe.save_pretrained(args.dump_path)
print("done writing VQ diffusion model")
| 0 |
hf_public_repos/diffusers | hf_public_repos/diffusers/scripts/convert_stable_diffusion_checkpoint_to_onnx.py | # Copyright 2023 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import argparse
import os
import shutil
from pathlib import Path
import onnx
import torch
from packaging import version
from torch.onnx import export
from diffusers import OnnxRuntimeModel, OnnxStableDiffusionPipeline, StableDiffusionPipeline
is_torch_less_than_1_11 = version.parse(version.parse(torch.__version__).base_version) < version.parse("1.11")
def onnx_export(
model,
model_args: tuple,
output_path: Path,
ordered_input_names,
output_names,
dynamic_axes,
opset,
use_external_data_format=False,
):
output_path.parent.mkdir(parents=True, exist_ok=True)
# PyTorch deprecated the `enable_onnx_checker` and `use_external_data_format` arguments in v1.11,
# so we check the torch version for backwards compatibility
if is_torch_less_than_1_11:
export(
model,
model_args,
f=output_path.as_posix(),
input_names=ordered_input_names,
output_names=output_names,
dynamic_axes=dynamic_axes,
do_constant_folding=True,
use_external_data_format=use_external_data_format,
enable_onnx_checker=True,
opset_version=opset,
)
else:
export(
model,
model_args,
f=output_path.as_posix(),
input_names=ordered_input_names,
output_names=output_names,
dynamic_axes=dynamic_axes,
do_constant_folding=True,
opset_version=opset,
)
@torch.no_grad()
def convert_models(model_path: str, output_path: str, opset: int, fp16: bool = False):
dtype = torch.float16 if fp16 else torch.float32
if fp16 and torch.cuda.is_available():
device = "cuda"
elif fp16 and not torch.cuda.is_available():
raise ValueError("`float16` model export is only supported on GPUs with CUDA")
else:
device = "cpu"
pipeline = StableDiffusionPipeline.from_pretrained(model_path, torch_dtype=dtype).to(device)
output_path = Path(output_path)
# TEXT ENCODER
num_tokens = pipeline.text_encoder.config.max_position_embeddings
text_hidden_size = pipeline.text_encoder.config.hidden_size
text_input = pipeline.tokenizer(
"A sample prompt",
padding="max_length",
max_length=pipeline.tokenizer.model_max_length,
truncation=True,
return_tensors="pt",
)
onnx_export(
pipeline.text_encoder,
# casting to torch.int32 until the CLIP fix is released: https://github.com/huggingface/transformers/pull/18515/files
model_args=(text_input.input_ids.to(device=device, dtype=torch.int32)),
output_path=output_path / "text_encoder" / "model.onnx",
ordered_input_names=["input_ids"],
output_names=["last_hidden_state", "pooler_output"],
dynamic_axes={
"input_ids": {0: "batch", 1: "sequence"},
},
opset=opset,
)
del pipeline.text_encoder
# UNET
unet_in_channels = pipeline.unet.config.in_channels
unet_sample_size = pipeline.unet.config.sample_size
unet_path = output_path / "unet" / "model.onnx"
onnx_export(
pipeline.unet,
model_args=(
torch.randn(2, unet_in_channels, unet_sample_size, unet_sample_size).to(device=device, dtype=dtype),
torch.randn(2).to(device=device, dtype=dtype),
torch.randn(2, num_tokens, text_hidden_size).to(device=device, dtype=dtype),
False,
),
output_path=unet_path,
ordered_input_names=["sample", "timestep", "encoder_hidden_states", "return_dict"],
output_names=["out_sample"], # has to be different from "sample" for correct tracing
dynamic_axes={
"sample": {0: "batch", 1: "channels", 2: "height", 3: "width"},
"timestep": {0: "batch"},
"encoder_hidden_states": {0: "batch", 1: "sequence"},
},
opset=opset,
use_external_data_format=True, # UNet is > 2GB, so the weights need to be split
)
unet_model_path = str(unet_path.absolute().as_posix())
unet_dir = os.path.dirname(unet_model_path)
unet = onnx.load(unet_model_path)
# clean up existing tensor files
shutil.rmtree(unet_dir)
os.mkdir(unet_dir)
# collate external tensor files into one
onnx.save_model(
unet,
unet_model_path,
save_as_external_data=True,
all_tensors_to_one_file=True,
location="weights.pb",
convert_attribute=False,
)
del pipeline.unet
# VAE ENCODER
vae_encoder = pipeline.vae
vae_in_channels = vae_encoder.config.in_channels
vae_sample_size = vae_encoder.config.sample_size
# need to get the raw tensor output (sample) from the encoder
vae_encoder.forward = lambda sample, return_dict: vae_encoder.encode(sample, return_dict)[0].sample()
onnx_export(
vae_encoder,
model_args=(
torch.randn(1, vae_in_channels, vae_sample_size, vae_sample_size).to(device=device, dtype=dtype),
False,
),
output_path=output_path / "vae_encoder" / "model.onnx",
ordered_input_names=["sample", "return_dict"],
output_names=["latent_sample"],
dynamic_axes={
"sample": {0: "batch", 1: "channels", 2: "height", 3: "width"},
},
opset=opset,
)
# VAE DECODER
vae_decoder = pipeline.vae
vae_latent_channels = vae_decoder.config.latent_channels
vae_out_channels = vae_decoder.config.out_channels
# forward only through the decoder part
vae_decoder.forward = vae_encoder.decode
onnx_export(
vae_decoder,
model_args=(
torch.randn(1, vae_latent_channels, unet_sample_size, unet_sample_size).to(device=device, dtype=dtype),
False,
),
output_path=output_path / "vae_decoder" / "model.onnx",
ordered_input_names=["latent_sample", "return_dict"],
output_names=["sample"],
dynamic_axes={
"latent_sample": {0: "batch", 1: "channels", 2: "height", 3: "width"},
},
opset=opset,
)
del pipeline.vae
# SAFETY CHECKER
if pipeline.safety_checker is not None:
safety_checker = pipeline.safety_checker
clip_num_channels = safety_checker.config.vision_config.num_channels
clip_image_size = safety_checker.config.vision_config.image_size
safety_checker.forward = safety_checker.forward_onnx
onnx_export(
pipeline.safety_checker,
model_args=(
torch.randn(
1,
clip_num_channels,
clip_image_size,
clip_image_size,
).to(device=device, dtype=dtype),
torch.randn(1, vae_sample_size, vae_sample_size, vae_out_channels).to(device=device, dtype=dtype),
),
output_path=output_path / "safety_checker" / "model.onnx",
ordered_input_names=["clip_input", "images"],
output_names=["out_images", "has_nsfw_concepts"],
dynamic_axes={
"clip_input": {0: "batch", 1: "channels", 2: "height", 3: "width"},
"images": {0: "batch", 1: "height", 2: "width", 3: "channels"},
},
opset=opset,
)
del pipeline.safety_checker
safety_checker = OnnxRuntimeModel.from_pretrained(output_path / "safety_checker")
feature_extractor = pipeline.feature_extractor
else:
safety_checker = None
feature_extractor = None
onnx_pipeline = OnnxStableDiffusionPipeline(
vae_encoder=OnnxRuntimeModel.from_pretrained(output_path / "vae_encoder"),
vae_decoder=OnnxRuntimeModel.from_pretrained(output_path / "vae_decoder"),
text_encoder=OnnxRuntimeModel.from_pretrained(output_path / "text_encoder"),
tokenizer=pipeline.tokenizer,
unet=OnnxRuntimeModel.from_pretrained(output_path / "unet"),
scheduler=pipeline.scheduler,
safety_checker=safety_checker,
feature_extractor=feature_extractor,
requires_safety_checker=safety_checker is not None,
)
onnx_pipeline.save_pretrained(output_path)
print("ONNX pipeline saved to", output_path)
del pipeline
del onnx_pipeline
_ = OnnxStableDiffusionPipeline.from_pretrained(output_path, provider="CPUExecutionProvider")
print("ONNX pipeline is loadable")
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument(
"--model_path",
type=str,
required=True,
help="Path to the `diffusers` checkpoint to convert (either a local directory or on the Hub).",
)
parser.add_argument("--output_path", type=str, required=True, help="Path to the output model.")
parser.add_argument(
"--opset",
default=14,
type=int,
help="The version of the ONNX operator set to use.",
)
parser.add_argument("--fp16", action="store_true", default=False, help="Export the models in `float16` mode")
args = parser.parse_args()
convert_models(args.model_path, args.output_path, args.opset, args.fp16)
| 0 |
hf_public_repos/diffusers | hf_public_repos/diffusers/scripts/convert_dance_diffusion_to_diffusers.py | #!/usr/bin/env python3
import argparse
import math
import os
from copy import deepcopy
import torch
from audio_diffusion.models import DiffusionAttnUnet1D
from diffusion import sampling
from torch import nn
from diffusers import DanceDiffusionPipeline, IPNDMScheduler, UNet1DModel
MODELS_MAP = {
"gwf-440k": {
"url": "https://model-server.zqevans2.workers.dev/gwf-440k.ckpt",
"sample_rate": 48000,
"sample_size": 65536,
},
"jmann-small-190k": {
"url": "https://model-server.zqevans2.workers.dev/jmann-small-190k.ckpt",
"sample_rate": 48000,
"sample_size": 65536,
},
"jmann-large-580k": {
"url": "https://model-server.zqevans2.workers.dev/jmann-large-580k.ckpt",
"sample_rate": 48000,
"sample_size": 131072,
},
"maestro-uncond-150k": {
"url": "https://model-server.zqevans2.workers.dev/maestro-uncond-150k.ckpt",
"sample_rate": 16000,
"sample_size": 65536,
},
"unlocked-uncond-250k": {
"url": "https://model-server.zqevans2.workers.dev/unlocked-uncond-250k.ckpt",
"sample_rate": 16000,
"sample_size": 65536,
},
"honk-140k": {
"url": "https://model-server.zqevans2.workers.dev/honk-140k.ckpt",
"sample_rate": 16000,
"sample_size": 65536,
},
}
def alpha_sigma_to_t(alpha, sigma):
"""Returns a timestep, given the scaling factors for the clean image and for
the noise."""
return torch.atan2(sigma, alpha) / math.pi * 2
def get_crash_schedule(t):
sigma = torch.sin(t * math.pi / 2) ** 2
alpha = (1 - sigma**2) ** 0.5
return alpha_sigma_to_t(alpha, sigma)
class Object(object):
pass
class DiffusionUncond(nn.Module):
def __init__(self, global_args):
super().__init__()
self.diffusion = DiffusionAttnUnet1D(global_args, n_attn_layers=4)
self.diffusion_ema = deepcopy(self.diffusion)
self.rng = torch.quasirandom.SobolEngine(1, scramble=True)
def download(model_name):
url = MODELS_MAP[model_name]["url"]
os.system(f"wget {url} ./")
return f"./{model_name}.ckpt"
DOWN_NUM_TO_LAYER = {
"1": "resnets.0",
"2": "attentions.0",
"3": "resnets.1",
"4": "attentions.1",
"5": "resnets.2",
"6": "attentions.2",
}
UP_NUM_TO_LAYER = {
"8": "resnets.0",
"9": "attentions.0",
"10": "resnets.1",
"11": "attentions.1",
"12": "resnets.2",
"13": "attentions.2",
}
MID_NUM_TO_LAYER = {
"1": "resnets.0",
"2": "attentions.0",
"3": "resnets.1",
"4": "attentions.1",
"5": "resnets.2",
"6": "attentions.2",
"8": "resnets.3",
"9": "attentions.3",
"10": "resnets.4",
"11": "attentions.4",
"12": "resnets.5",
"13": "attentions.5",
}
DEPTH_0_TO_LAYER = {
"0": "resnets.0",
"1": "resnets.1",
"2": "resnets.2",
"4": "resnets.0",
"5": "resnets.1",
"6": "resnets.2",
}
RES_CONV_MAP = {
"skip": "conv_skip",
"main.0": "conv_1",
"main.1": "group_norm_1",
"main.3": "conv_2",
"main.4": "group_norm_2",
}
ATTN_MAP = {
"norm": "group_norm",
"qkv_proj": ["query", "key", "value"],
"out_proj": ["proj_attn"],
}
def convert_resconv_naming(name):
if name.startswith("skip"):
return name.replace("skip", RES_CONV_MAP["skip"])
# name has to be of format main.{digit}
if not name.startswith("main."):
raise ValueError(f"ResConvBlock error with {name}")
return name.replace(name[:6], RES_CONV_MAP[name[:6]])
def convert_attn_naming(name):
for key, value in ATTN_MAP.items():
if name.startswith(key) and not isinstance(value, list):
return name.replace(key, value)
elif name.startswith(key):
return [name.replace(key, v) for v in value]
raise ValueError(f"Attn error with {name}")
def rename(input_string, max_depth=13):
string = input_string
if string.split(".")[0] == "timestep_embed":
return string.replace("timestep_embed", "time_proj")
depth = 0
if string.startswith("net.3."):
depth += 1
string = string[6:]
elif string.startswith("net."):
string = string[4:]
while string.startswith("main.7."):
depth += 1
string = string[7:]
if string.startswith("main."):
string = string[5:]
# mid block
if string[:2].isdigit():
layer_num = string[:2]
string_left = string[2:]
else:
layer_num = string[0]
string_left = string[1:]
if depth == max_depth:
new_layer = MID_NUM_TO_LAYER[layer_num]
prefix = "mid_block"
elif depth > 0 and int(layer_num) < 7:
new_layer = DOWN_NUM_TO_LAYER[layer_num]
prefix = f"down_blocks.{depth}"
elif depth > 0 and int(layer_num) > 7:
new_layer = UP_NUM_TO_LAYER[layer_num]
prefix = f"up_blocks.{max_depth - depth - 1}"
elif depth == 0:
new_layer = DEPTH_0_TO_LAYER[layer_num]
prefix = f"up_blocks.{max_depth - 1}" if int(layer_num) > 3 else "down_blocks.0"
if not string_left.startswith("."):
raise ValueError(f"Naming error with {input_string} and string_left: {string_left}.")
string_left = string_left[1:]
if "resnets" in new_layer:
string_left = convert_resconv_naming(string_left)
elif "attentions" in new_layer:
new_string_left = convert_attn_naming(string_left)
string_left = new_string_left
if not isinstance(string_left, list):
new_string = prefix + "." + new_layer + "." + string_left
else:
new_string = [prefix + "." + new_layer + "." + s for s in string_left]
return new_string
def rename_orig_weights(state_dict):
new_state_dict = {}
for k, v in state_dict.items():
if k.endswith("kernel"):
# up- and downsample layers, don't have trainable weights
continue
new_k = rename(k)
# check if we need to transform from Conv => Linear for attention
if isinstance(new_k, list):
new_state_dict = transform_conv_attns(new_state_dict, new_k, v)
else:
new_state_dict[new_k] = v
return new_state_dict
def transform_conv_attns(new_state_dict, new_k, v):
if len(new_k) == 1:
if len(v.shape) == 3:
# weight
new_state_dict[new_k[0]] = v[:, :, 0]
else:
# bias
new_state_dict[new_k[0]] = v
else:
# qkv matrices
trippled_shape = v.shape[0]
single_shape = trippled_shape // 3
for i in range(3):
if len(v.shape) == 3:
new_state_dict[new_k[i]] = v[i * single_shape : (i + 1) * single_shape, :, 0]
else:
new_state_dict[new_k[i]] = v[i * single_shape : (i + 1) * single_shape]
return new_state_dict
def main(args):
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
model_name = args.model_path.split("/")[-1].split(".")[0]
if not os.path.isfile(args.model_path):
assert (
model_name == args.model_path
), f"Make sure to provide one of the official model names {MODELS_MAP.keys()}"
args.model_path = download(model_name)
sample_rate = MODELS_MAP[model_name]["sample_rate"]
sample_size = MODELS_MAP[model_name]["sample_size"]
config = Object()
config.sample_size = sample_size
config.sample_rate = sample_rate
config.latent_dim = 0
diffusers_model = UNet1DModel(sample_size=sample_size, sample_rate=sample_rate)
diffusers_state_dict = diffusers_model.state_dict()
orig_model = DiffusionUncond(config)
orig_model.load_state_dict(torch.load(args.model_path, map_location=device)["state_dict"])
orig_model = orig_model.diffusion_ema.eval()
orig_model_state_dict = orig_model.state_dict()
renamed_state_dict = rename_orig_weights(orig_model_state_dict)
renamed_minus_diffusers = set(renamed_state_dict.keys()) - set(diffusers_state_dict.keys())
diffusers_minus_renamed = set(diffusers_state_dict.keys()) - set(renamed_state_dict.keys())
assert len(renamed_minus_diffusers) == 0, f"Problem with {renamed_minus_diffusers}"
assert all(k.endswith("kernel") for k in list(diffusers_minus_renamed)), f"Problem with {diffusers_minus_renamed}"
for key, value in renamed_state_dict.items():
assert (
diffusers_state_dict[key].squeeze().shape == value.squeeze().shape
), f"Shape for {key} doesn't match. Diffusers: {diffusers_state_dict[key].shape} vs. {value.shape}"
if key == "time_proj.weight":
value = value.squeeze()
diffusers_state_dict[key] = value
diffusers_model.load_state_dict(diffusers_state_dict)
steps = 100
seed = 33
diffusers_scheduler = IPNDMScheduler(num_train_timesteps=steps)
generator = torch.manual_seed(seed)
noise = torch.randn([1, 2, config.sample_size], generator=generator).to(device)
t = torch.linspace(1, 0, steps + 1, device=device)[:-1]
step_list = get_crash_schedule(t)
pipe = DanceDiffusionPipeline(unet=diffusers_model, scheduler=diffusers_scheduler)
generator = torch.manual_seed(33)
audio = pipe(num_inference_steps=steps, generator=generator).audios
generated = sampling.iplms_sample(orig_model, noise, step_list, {})
generated = generated.clamp(-1, 1)
diff_sum = (generated - audio).abs().sum()
diff_max = (generated - audio).abs().max()
if args.save:
pipe.save_pretrained(args.checkpoint_path)
print("Diff sum", diff_sum)
print("Diff max", diff_max)
assert diff_max < 1e-3, f"Diff max: {diff_max} is too much :-/"
print(f"Conversion for {model_name} successful!")
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument("--model_path", default=None, type=str, required=True, help="Path to the model to convert.")
parser.add_argument(
"--save", default=True, type=bool, required=False, help="Whether to save the converted model or not."
)
parser.add_argument("--checkpoint_path", default=None, type=str, required=True, help="Path to the output model.")
args = parser.parse_args()
main(args)
| 0 |
hf_public_repos/diffusers | hf_public_repos/diffusers/scripts/convert_kandinsky_to_diffusers.py | import argparse
import os
import tempfile
import torch
from accelerate import load_checkpoint_and_dispatch
from diffusers import UNet2DConditionModel
from diffusers.models.prior_transformer import PriorTransformer
from diffusers.models.vq_model import VQModel
"""
Example - From the diffusers root directory:
Download weights:
```sh
$ wget https://huggingface.co/ai-forever/Kandinsky_2.1/blob/main/prior_fp16.ckpt
```
Convert the model:
```sh
python scripts/convert_kandinsky_to_diffusers.py \
--prior_checkpoint_path /home/yiyi_huggingface_co/Kandinsky-2/checkpoints_Kandinsky_2.1/prior_fp16.ckpt \
--clip_stat_path /home/yiyi_huggingface_co/Kandinsky-2/checkpoints_Kandinsky_2.1/ViT-L-14_stats.th \
--text2img_checkpoint_path /home/yiyi_huggingface_co/Kandinsky-2/checkpoints_Kandinsky_2.1/decoder_fp16.ckpt \
--inpaint_text2img_checkpoint_path /home/yiyi_huggingface_co/Kandinsky-2/checkpoints_Kandinsky_2.1/inpainting_fp16.ckpt \
--movq_checkpoint_path /home/yiyi_huggingface_co/Kandinsky-2/checkpoints_Kandinsky_2.1/movq_final.ckpt \
--dump_path /home/yiyi_huggingface_co/dump \
--debug decoder
```
"""
# prior
PRIOR_ORIGINAL_PREFIX = "model"
# Uses default arguments
PRIOR_CONFIG = {}
def prior_model_from_original_config():
model = PriorTransformer(**PRIOR_CONFIG)
return model
def prior_original_checkpoint_to_diffusers_checkpoint(model, checkpoint, clip_stats_checkpoint):
diffusers_checkpoint = {}
# <original>.time_embed.0 -> <diffusers>.time_embedding.linear_1
diffusers_checkpoint.update(
{
"time_embedding.linear_1.weight": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.time_embed.0.weight"],
"time_embedding.linear_1.bias": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.time_embed.0.bias"],
}
)
# <original>.clip_img_proj -> <diffusers>.proj_in
diffusers_checkpoint.update(
{
"proj_in.weight": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.clip_img_proj.weight"],
"proj_in.bias": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.clip_img_proj.bias"],
}
)
# <original>.text_emb_proj -> <diffusers>.embedding_proj
diffusers_checkpoint.update(
{
"embedding_proj.weight": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.text_emb_proj.weight"],
"embedding_proj.bias": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.text_emb_proj.bias"],
}
)
# <original>.text_enc_proj -> <diffusers>.encoder_hidden_states_proj
diffusers_checkpoint.update(
{
"encoder_hidden_states_proj.weight": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.text_enc_proj.weight"],
"encoder_hidden_states_proj.bias": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.text_enc_proj.bias"],
}
)
# <original>.positional_embedding -> <diffusers>.positional_embedding
diffusers_checkpoint.update({"positional_embedding": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.positional_embedding"]})
# <original>.prd_emb -> <diffusers>.prd_embedding
diffusers_checkpoint.update({"prd_embedding": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.prd_emb"]})
# <original>.time_embed.2 -> <diffusers>.time_embedding.linear_2
diffusers_checkpoint.update(
{
"time_embedding.linear_2.weight": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.time_embed.2.weight"],
"time_embedding.linear_2.bias": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.time_embed.2.bias"],
}
)
# <original>.resblocks.<x> -> <diffusers>.transformer_blocks.<x>
for idx in range(len(model.transformer_blocks)):
diffusers_transformer_prefix = f"transformer_blocks.{idx}"
original_transformer_prefix = f"{PRIOR_ORIGINAL_PREFIX}.transformer.resblocks.{idx}"
# <original>.attn -> <diffusers>.attn1
diffusers_attention_prefix = f"{diffusers_transformer_prefix}.attn1"
original_attention_prefix = f"{original_transformer_prefix}.attn"
diffusers_checkpoint.update(
prior_attention_to_diffusers(
checkpoint,
diffusers_attention_prefix=diffusers_attention_prefix,
original_attention_prefix=original_attention_prefix,
attention_head_dim=model.attention_head_dim,
)
)
# <original>.mlp -> <diffusers>.ff
diffusers_ff_prefix = f"{diffusers_transformer_prefix}.ff"
original_ff_prefix = f"{original_transformer_prefix}.mlp"
diffusers_checkpoint.update(
prior_ff_to_diffusers(
checkpoint, diffusers_ff_prefix=diffusers_ff_prefix, original_ff_prefix=original_ff_prefix
)
)
# <original>.ln_1 -> <diffusers>.norm1
diffusers_checkpoint.update(
{
f"{diffusers_transformer_prefix}.norm1.weight": checkpoint[
f"{original_transformer_prefix}.ln_1.weight"
],
f"{diffusers_transformer_prefix}.norm1.bias": checkpoint[f"{original_transformer_prefix}.ln_1.bias"],
}
)
# <original>.ln_2 -> <diffusers>.norm3
diffusers_checkpoint.update(
{
f"{diffusers_transformer_prefix}.norm3.weight": checkpoint[
f"{original_transformer_prefix}.ln_2.weight"
],
f"{diffusers_transformer_prefix}.norm3.bias": checkpoint[f"{original_transformer_prefix}.ln_2.bias"],
}
)
# <original>.final_ln -> <diffusers>.norm_out
diffusers_checkpoint.update(
{
"norm_out.weight": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.final_ln.weight"],
"norm_out.bias": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.final_ln.bias"],
}
)
# <original>.out_proj -> <diffusers>.proj_to_clip_embeddings
diffusers_checkpoint.update(
{
"proj_to_clip_embeddings.weight": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.out_proj.weight"],
"proj_to_clip_embeddings.bias": checkpoint[f"{PRIOR_ORIGINAL_PREFIX}.out_proj.bias"],
}
)
# clip stats
clip_mean, clip_std = clip_stats_checkpoint
clip_mean = clip_mean[None, :]
clip_std = clip_std[None, :]
diffusers_checkpoint.update({"clip_mean": clip_mean, "clip_std": clip_std})
return diffusers_checkpoint
def prior_attention_to_diffusers(
checkpoint, *, diffusers_attention_prefix, original_attention_prefix, attention_head_dim
):
diffusers_checkpoint = {}
# <original>.c_qkv -> <diffusers>.{to_q, to_k, to_v}
[q_weight, k_weight, v_weight], [q_bias, k_bias, v_bias] = split_attentions(
weight=checkpoint[f"{original_attention_prefix}.c_qkv.weight"],
bias=checkpoint[f"{original_attention_prefix}.c_qkv.bias"],
split=3,
chunk_size=attention_head_dim,
)
diffusers_checkpoint.update(
{
f"{diffusers_attention_prefix}.to_q.weight": q_weight,
f"{diffusers_attention_prefix}.to_q.bias": q_bias,
f"{diffusers_attention_prefix}.to_k.weight": k_weight,
f"{diffusers_attention_prefix}.to_k.bias": k_bias,
f"{diffusers_attention_prefix}.to_v.weight": v_weight,
f"{diffusers_attention_prefix}.to_v.bias": v_bias,
}
)
# <original>.c_proj -> <diffusers>.to_out.0
diffusers_checkpoint.update(
{
f"{diffusers_attention_prefix}.to_out.0.weight": checkpoint[f"{original_attention_prefix}.c_proj.weight"],
f"{diffusers_attention_prefix}.to_out.0.bias": checkpoint[f"{original_attention_prefix}.c_proj.bias"],
}
)
return diffusers_checkpoint
def prior_ff_to_diffusers(checkpoint, *, diffusers_ff_prefix, original_ff_prefix):
diffusers_checkpoint = {
# <original>.c_fc -> <diffusers>.net.0.proj
f"{diffusers_ff_prefix}.net.{0}.proj.weight": checkpoint[f"{original_ff_prefix}.c_fc.weight"],
f"{diffusers_ff_prefix}.net.{0}.proj.bias": checkpoint[f"{original_ff_prefix}.c_fc.bias"],
# <original>.c_proj -> <diffusers>.net.2
f"{diffusers_ff_prefix}.net.{2}.weight": checkpoint[f"{original_ff_prefix}.c_proj.weight"],
f"{diffusers_ff_prefix}.net.{2}.bias": checkpoint[f"{original_ff_prefix}.c_proj.bias"],
}
return diffusers_checkpoint
# done prior
# unet
# We are hardcoding the model configuration for now. If we need to generalize to more model configurations, we can
# update then.
UNET_CONFIG = {
"act_fn": "silu",
"addition_embed_type": "text_image",
"addition_embed_type_num_heads": 64,
"attention_head_dim": 64,
"block_out_channels": [384, 768, 1152, 1536],
"center_input_sample": False,
"class_embed_type": None,
"class_embeddings_concat": False,
"conv_in_kernel": 3,
"conv_out_kernel": 3,
"cross_attention_dim": 768,
"cross_attention_norm": None,
"down_block_types": [
"ResnetDownsampleBlock2D",
"SimpleCrossAttnDownBlock2D",
"SimpleCrossAttnDownBlock2D",
"SimpleCrossAttnDownBlock2D",
],
"downsample_padding": 1,
"dual_cross_attention": False,
"encoder_hid_dim": 1024,
"encoder_hid_dim_type": "text_image_proj",
"flip_sin_to_cos": True,
"freq_shift": 0,
"in_channels": 4,
"layers_per_block": 3,
"mid_block_only_cross_attention": None,
"mid_block_scale_factor": 1,
"mid_block_type": "UNetMidBlock2DSimpleCrossAttn",
"norm_eps": 1e-05,
"norm_num_groups": 32,
"num_class_embeds": None,
"only_cross_attention": False,
"out_channels": 8,
"projection_class_embeddings_input_dim": None,
"resnet_out_scale_factor": 1.0,
"resnet_skip_time_act": False,
"resnet_time_scale_shift": "scale_shift",
"sample_size": 64,
"time_cond_proj_dim": None,
"time_embedding_act_fn": None,
"time_embedding_dim": None,
"time_embedding_type": "positional",
"timestep_post_act": None,
"up_block_types": [
"SimpleCrossAttnUpBlock2D",
"SimpleCrossAttnUpBlock2D",
"SimpleCrossAttnUpBlock2D",
"ResnetUpsampleBlock2D",
],
"upcast_attention": False,
"use_linear_projection": False,
}
def unet_model_from_original_config():
model = UNet2DConditionModel(**UNET_CONFIG)
return model
def unet_original_checkpoint_to_diffusers_checkpoint(model, checkpoint):
diffusers_checkpoint = {}
num_head_channels = UNET_CONFIG["attention_head_dim"]
diffusers_checkpoint.update(unet_time_embeddings(checkpoint))
diffusers_checkpoint.update(unet_conv_in(checkpoint))
diffusers_checkpoint.update(unet_add_embedding(checkpoint))
diffusers_checkpoint.update(unet_encoder_hid_proj(checkpoint))
# <original>.input_blocks -> <diffusers>.down_blocks
original_down_block_idx = 1
for diffusers_down_block_idx in range(len(model.down_blocks)):
checkpoint_update, num_original_down_blocks = unet_downblock_to_diffusers_checkpoint(
model,
checkpoint,
diffusers_down_block_idx=diffusers_down_block_idx,
original_down_block_idx=original_down_block_idx,
num_head_channels=num_head_channels,
)
original_down_block_idx += num_original_down_blocks
diffusers_checkpoint.update(checkpoint_update)
# done <original>.input_blocks -> <diffusers>.down_blocks
diffusers_checkpoint.update(
unet_midblock_to_diffusers_checkpoint(
model,
checkpoint,
num_head_channels=num_head_channels,
)
)
# <original>.output_blocks -> <diffusers>.up_blocks
original_up_block_idx = 0
for diffusers_up_block_idx in range(len(model.up_blocks)):
checkpoint_update, num_original_up_blocks = unet_upblock_to_diffusers_checkpoint(
model,
checkpoint,
diffusers_up_block_idx=diffusers_up_block_idx,
original_up_block_idx=original_up_block_idx,
num_head_channels=num_head_channels,
)
original_up_block_idx += num_original_up_blocks
diffusers_checkpoint.update(checkpoint_update)
# done <original>.output_blocks -> <diffusers>.up_blocks
diffusers_checkpoint.update(unet_conv_norm_out(checkpoint))
diffusers_checkpoint.update(unet_conv_out(checkpoint))
return diffusers_checkpoint
# done unet
# inpaint unet
# We are hardcoding the model configuration for now. If we need to generalize to more model configurations, we can
# update then.
INPAINT_UNET_CONFIG = {
"act_fn": "silu",
"addition_embed_type": "text_image",
"addition_embed_type_num_heads": 64,
"attention_head_dim": 64,
"block_out_channels": [384, 768, 1152, 1536],
"center_input_sample": False,
"class_embed_type": None,
"class_embeddings_concat": None,
"conv_in_kernel": 3,
"conv_out_kernel": 3,
"cross_attention_dim": 768,
"cross_attention_norm": None,
"down_block_types": [
"ResnetDownsampleBlock2D",
"SimpleCrossAttnDownBlock2D",
"SimpleCrossAttnDownBlock2D",
"SimpleCrossAttnDownBlock2D",
],
"downsample_padding": 1,
"dual_cross_attention": False,
"encoder_hid_dim": 1024,
"encoder_hid_dim_type": "text_image_proj",
"flip_sin_to_cos": True,
"freq_shift": 0,
"in_channels": 9,
"layers_per_block": 3,
"mid_block_only_cross_attention": None,
"mid_block_scale_factor": 1,
"mid_block_type": "UNetMidBlock2DSimpleCrossAttn",
"norm_eps": 1e-05,
"norm_num_groups": 32,
"num_class_embeds": None,
"only_cross_attention": False,
"out_channels": 8,
"projection_class_embeddings_input_dim": None,
"resnet_out_scale_factor": 1.0,
"resnet_skip_time_act": False,
"resnet_time_scale_shift": "scale_shift",
"sample_size": 64,
"time_cond_proj_dim": None,
"time_embedding_act_fn": None,
"time_embedding_dim": None,
"time_embedding_type": "positional",
"timestep_post_act": None,
"up_block_types": [
"SimpleCrossAttnUpBlock2D",
"SimpleCrossAttnUpBlock2D",
"SimpleCrossAttnUpBlock2D",
"ResnetUpsampleBlock2D",
],
"upcast_attention": False,
"use_linear_projection": False,
}
def inpaint_unet_model_from_original_config():
model = UNet2DConditionModel(**INPAINT_UNET_CONFIG)
return model
def inpaint_unet_original_checkpoint_to_diffusers_checkpoint(model, checkpoint):
diffusers_checkpoint = {}
num_head_channels = INPAINT_UNET_CONFIG["attention_head_dim"]
diffusers_checkpoint.update(unet_time_embeddings(checkpoint))
diffusers_checkpoint.update(unet_conv_in(checkpoint))
diffusers_checkpoint.update(unet_add_embedding(checkpoint))
diffusers_checkpoint.update(unet_encoder_hid_proj(checkpoint))
# <original>.input_blocks -> <diffusers>.down_blocks
original_down_block_idx = 1
for diffusers_down_block_idx in range(len(model.down_blocks)):
checkpoint_update, num_original_down_blocks = unet_downblock_to_diffusers_checkpoint(
model,
checkpoint,
diffusers_down_block_idx=diffusers_down_block_idx,
original_down_block_idx=original_down_block_idx,
num_head_channels=num_head_channels,
)
original_down_block_idx += num_original_down_blocks
diffusers_checkpoint.update(checkpoint_update)
# done <original>.input_blocks -> <diffusers>.down_blocks
diffusers_checkpoint.update(
unet_midblock_to_diffusers_checkpoint(
model,
checkpoint,
num_head_channels=num_head_channels,
)
)
# <original>.output_blocks -> <diffusers>.up_blocks
original_up_block_idx = 0
for diffusers_up_block_idx in range(len(model.up_blocks)):
checkpoint_update, num_original_up_blocks = unet_upblock_to_diffusers_checkpoint(
model,
checkpoint,
diffusers_up_block_idx=diffusers_up_block_idx,
original_up_block_idx=original_up_block_idx,
num_head_channels=num_head_channels,
)
original_up_block_idx += num_original_up_blocks
diffusers_checkpoint.update(checkpoint_update)
# done <original>.output_blocks -> <diffusers>.up_blocks
diffusers_checkpoint.update(unet_conv_norm_out(checkpoint))
diffusers_checkpoint.update(unet_conv_out(checkpoint))
return diffusers_checkpoint
# done inpaint unet
# unet utils
# <original>.time_embed -> <diffusers>.time_embedding
def unet_time_embeddings(checkpoint):
diffusers_checkpoint = {}
diffusers_checkpoint.update(
{
"time_embedding.linear_1.weight": checkpoint["time_embed.0.weight"],
"time_embedding.linear_1.bias": checkpoint["time_embed.0.bias"],
"time_embedding.linear_2.weight": checkpoint["time_embed.2.weight"],
"time_embedding.linear_2.bias": checkpoint["time_embed.2.bias"],
}
)
return diffusers_checkpoint
# <original>.input_blocks.0 -> <diffusers>.conv_in
def unet_conv_in(checkpoint):
diffusers_checkpoint = {}
diffusers_checkpoint.update(
{
"conv_in.weight": checkpoint["input_blocks.0.0.weight"],
"conv_in.bias": checkpoint["input_blocks.0.0.bias"],
}
)
return diffusers_checkpoint
def unet_add_embedding(checkpoint):
diffusers_checkpoint = {}
diffusers_checkpoint.update(
{
"add_embedding.text_norm.weight": checkpoint["ln_model_n.weight"],
"add_embedding.text_norm.bias": checkpoint["ln_model_n.bias"],
"add_embedding.text_proj.weight": checkpoint["proj_n.weight"],
"add_embedding.text_proj.bias": checkpoint["proj_n.bias"],
"add_embedding.image_proj.weight": checkpoint["img_layer.weight"],
"add_embedding.image_proj.bias": checkpoint["img_layer.bias"],
}
)
return diffusers_checkpoint
def unet_encoder_hid_proj(checkpoint):
diffusers_checkpoint = {}
diffusers_checkpoint.update(
{
"encoder_hid_proj.image_embeds.weight": checkpoint["clip_to_seq.weight"],
"encoder_hid_proj.image_embeds.bias": checkpoint["clip_to_seq.bias"],
"encoder_hid_proj.text_proj.weight": checkpoint["to_model_dim_n.weight"],
"encoder_hid_proj.text_proj.bias": checkpoint["to_model_dim_n.bias"],
}
)
return diffusers_checkpoint
# <original>.out.0 -> <diffusers>.conv_norm_out
def unet_conv_norm_out(checkpoint):
diffusers_checkpoint = {}
diffusers_checkpoint.update(
{
"conv_norm_out.weight": checkpoint["out.0.weight"],
"conv_norm_out.bias": checkpoint["out.0.bias"],
}
)
return diffusers_checkpoint
# <original>.out.2 -> <diffusers>.conv_out
def unet_conv_out(checkpoint):
diffusers_checkpoint = {}
diffusers_checkpoint.update(
{
"conv_out.weight": checkpoint["out.2.weight"],
"conv_out.bias": checkpoint["out.2.bias"],
}
)
return diffusers_checkpoint
# <original>.input_blocks -> <diffusers>.down_blocks
def unet_downblock_to_diffusers_checkpoint(
model, checkpoint, *, diffusers_down_block_idx, original_down_block_idx, num_head_channels
):
diffusers_checkpoint = {}
diffusers_resnet_prefix = f"down_blocks.{diffusers_down_block_idx}.resnets"
original_down_block_prefix = "input_blocks"
down_block = model.down_blocks[diffusers_down_block_idx]
num_resnets = len(down_block.resnets)
if down_block.downsamplers is None:
downsampler = False
else:
assert len(down_block.downsamplers) == 1
downsampler = True
# The downsample block is also a resnet
num_resnets += 1
for resnet_idx_inc in range(num_resnets):
full_resnet_prefix = f"{original_down_block_prefix}.{original_down_block_idx + resnet_idx_inc}.0"
if downsampler and resnet_idx_inc == num_resnets - 1:
# this is a downsample block
full_diffusers_resnet_prefix = f"down_blocks.{diffusers_down_block_idx}.downsamplers.0"
else:
# this is a regular resnet block
full_diffusers_resnet_prefix = f"{diffusers_resnet_prefix}.{resnet_idx_inc}"
diffusers_checkpoint.update(
resnet_to_diffusers_checkpoint(
checkpoint, resnet_prefix=full_resnet_prefix, diffusers_resnet_prefix=full_diffusers_resnet_prefix
)
)
if hasattr(down_block, "attentions"):
num_attentions = len(down_block.attentions)
diffusers_attention_prefix = f"down_blocks.{diffusers_down_block_idx}.attentions"
for attention_idx_inc in range(num_attentions):
full_attention_prefix = f"{original_down_block_prefix}.{original_down_block_idx + attention_idx_inc}.1"
full_diffusers_attention_prefix = f"{diffusers_attention_prefix}.{attention_idx_inc}"
diffusers_checkpoint.update(
attention_to_diffusers_checkpoint(
checkpoint,
attention_prefix=full_attention_prefix,
diffusers_attention_prefix=full_diffusers_attention_prefix,
num_head_channels=num_head_channels,
)
)
num_original_down_blocks = num_resnets
return diffusers_checkpoint, num_original_down_blocks
# <original>.middle_block -> <diffusers>.mid_block
def unet_midblock_to_diffusers_checkpoint(model, checkpoint, *, num_head_channels):
diffusers_checkpoint = {}
# block 0
original_block_idx = 0
diffusers_checkpoint.update(
resnet_to_diffusers_checkpoint(
checkpoint,
diffusers_resnet_prefix="mid_block.resnets.0",
resnet_prefix=f"middle_block.{original_block_idx}",
)
)
original_block_idx += 1
# optional block 1
if hasattr(model.mid_block, "attentions") and model.mid_block.attentions[0] is not None:
diffusers_checkpoint.update(
attention_to_diffusers_checkpoint(
checkpoint,
diffusers_attention_prefix="mid_block.attentions.0",
attention_prefix=f"middle_block.{original_block_idx}",
num_head_channels=num_head_channels,
)
)
original_block_idx += 1
# block 1 or block 2
diffusers_checkpoint.update(
resnet_to_diffusers_checkpoint(
checkpoint,
diffusers_resnet_prefix="mid_block.resnets.1",
resnet_prefix=f"middle_block.{original_block_idx}",
)
)
return diffusers_checkpoint
# <original>.output_blocks -> <diffusers>.up_blocks
def unet_upblock_to_diffusers_checkpoint(
model, checkpoint, *, diffusers_up_block_idx, original_up_block_idx, num_head_channels
):
diffusers_checkpoint = {}
diffusers_resnet_prefix = f"up_blocks.{diffusers_up_block_idx}.resnets"
original_up_block_prefix = "output_blocks"
up_block = model.up_blocks[diffusers_up_block_idx]
num_resnets = len(up_block.resnets)
if up_block.upsamplers is None:
upsampler = False
else:
assert len(up_block.upsamplers) == 1
upsampler = True
# The upsample block is also a resnet
num_resnets += 1
has_attentions = hasattr(up_block, "attentions")
for resnet_idx_inc in range(num_resnets):
if upsampler and resnet_idx_inc == num_resnets - 1:
# this is an upsample block
if has_attentions:
# There is a middle attention block that we skip
original_resnet_block_idx = 2
else:
original_resnet_block_idx = 1
# we add the `minus 1` because the last two resnets are stuck together in the same output block
full_resnet_prefix = (
f"{original_up_block_prefix}.{original_up_block_idx + resnet_idx_inc - 1}.{original_resnet_block_idx}"
)
full_diffusers_resnet_prefix = f"up_blocks.{diffusers_up_block_idx}.upsamplers.0"
else:
# this is a regular resnet block
full_resnet_prefix = f"{original_up_block_prefix}.{original_up_block_idx + resnet_idx_inc}.0"
full_diffusers_resnet_prefix = f"{diffusers_resnet_prefix}.{resnet_idx_inc}"
diffusers_checkpoint.update(
resnet_to_diffusers_checkpoint(
checkpoint, resnet_prefix=full_resnet_prefix, diffusers_resnet_prefix=full_diffusers_resnet_prefix
)
)
if has_attentions:
num_attentions = len(up_block.attentions)
diffusers_attention_prefix = f"up_blocks.{diffusers_up_block_idx}.attentions"
for attention_idx_inc in range(num_attentions):
full_attention_prefix = f"{original_up_block_prefix}.{original_up_block_idx + attention_idx_inc}.1"
full_diffusers_attention_prefix = f"{diffusers_attention_prefix}.{attention_idx_inc}"
diffusers_checkpoint.update(
attention_to_diffusers_checkpoint(
checkpoint,
attention_prefix=full_attention_prefix,
diffusers_attention_prefix=full_diffusers_attention_prefix,
num_head_channels=num_head_channels,
)
)
num_original_down_blocks = num_resnets - 1 if upsampler else num_resnets
return diffusers_checkpoint, num_original_down_blocks
def resnet_to_diffusers_checkpoint(checkpoint, *, diffusers_resnet_prefix, resnet_prefix):
diffusers_checkpoint = {
f"{diffusers_resnet_prefix}.norm1.weight": checkpoint[f"{resnet_prefix}.in_layers.0.weight"],
f"{diffusers_resnet_prefix}.norm1.bias": checkpoint[f"{resnet_prefix}.in_layers.0.bias"],
f"{diffusers_resnet_prefix}.conv1.weight": checkpoint[f"{resnet_prefix}.in_layers.2.weight"],
f"{diffusers_resnet_prefix}.conv1.bias": checkpoint[f"{resnet_prefix}.in_layers.2.bias"],
f"{diffusers_resnet_prefix}.time_emb_proj.weight": checkpoint[f"{resnet_prefix}.emb_layers.1.weight"],
f"{diffusers_resnet_prefix}.time_emb_proj.bias": checkpoint[f"{resnet_prefix}.emb_layers.1.bias"],
f"{diffusers_resnet_prefix}.norm2.weight": checkpoint[f"{resnet_prefix}.out_layers.0.weight"],
f"{diffusers_resnet_prefix}.norm2.bias": checkpoint[f"{resnet_prefix}.out_layers.0.bias"],
f"{diffusers_resnet_prefix}.conv2.weight": checkpoint[f"{resnet_prefix}.out_layers.3.weight"],
f"{diffusers_resnet_prefix}.conv2.bias": checkpoint[f"{resnet_prefix}.out_layers.3.bias"],
}
skip_connection_prefix = f"{resnet_prefix}.skip_connection"
if f"{skip_connection_prefix}.weight" in checkpoint:
diffusers_checkpoint.update(
{
f"{diffusers_resnet_prefix}.conv_shortcut.weight": checkpoint[f"{skip_connection_prefix}.weight"],
f"{diffusers_resnet_prefix}.conv_shortcut.bias": checkpoint[f"{skip_connection_prefix}.bias"],
}
)
return diffusers_checkpoint
def attention_to_diffusers_checkpoint(checkpoint, *, diffusers_attention_prefix, attention_prefix, num_head_channels):
diffusers_checkpoint = {}
# <original>.norm -> <diffusers>.group_norm
diffusers_checkpoint.update(
{
f"{diffusers_attention_prefix}.group_norm.weight": checkpoint[f"{attention_prefix}.norm.weight"],
f"{diffusers_attention_prefix}.group_norm.bias": checkpoint[f"{attention_prefix}.norm.bias"],
}
)
# <original>.qkv -> <diffusers>.{query, key, value}
[q_weight, k_weight, v_weight], [q_bias, k_bias, v_bias] = split_attentions(
weight=checkpoint[f"{attention_prefix}.qkv.weight"][:, :, 0],
bias=checkpoint[f"{attention_prefix}.qkv.bias"],
split=3,
chunk_size=num_head_channels,
)
diffusers_checkpoint.update(
{
f"{diffusers_attention_prefix}.to_q.weight": q_weight,
f"{diffusers_attention_prefix}.to_q.bias": q_bias,
f"{diffusers_attention_prefix}.to_k.weight": k_weight,
f"{diffusers_attention_prefix}.to_k.bias": k_bias,
f"{diffusers_attention_prefix}.to_v.weight": v_weight,
f"{diffusers_attention_prefix}.to_v.bias": v_bias,
}
)
# <original>.encoder_kv -> <diffusers>.{context_key, context_value}
[encoder_k_weight, encoder_v_weight], [encoder_k_bias, encoder_v_bias] = split_attentions(
weight=checkpoint[f"{attention_prefix}.encoder_kv.weight"][:, :, 0],
bias=checkpoint[f"{attention_prefix}.encoder_kv.bias"],
split=2,
chunk_size=num_head_channels,
)
diffusers_checkpoint.update(
{
f"{diffusers_attention_prefix}.add_k_proj.weight": encoder_k_weight,
f"{diffusers_attention_prefix}.add_k_proj.bias": encoder_k_bias,
f"{diffusers_attention_prefix}.add_v_proj.weight": encoder_v_weight,
f"{diffusers_attention_prefix}.add_v_proj.bias": encoder_v_bias,
}
)
# <original>.proj_out (1d conv) -> <diffusers>.proj_attn (linear)
diffusers_checkpoint.update(
{
f"{diffusers_attention_prefix}.to_out.0.weight": checkpoint[f"{attention_prefix}.proj_out.weight"][
:, :, 0
],
f"{diffusers_attention_prefix}.to_out.0.bias": checkpoint[f"{attention_prefix}.proj_out.bias"],
}
)
return diffusers_checkpoint
# TODO maybe document and/or can do more efficiently (build indices in for loop and extract once for each split?)
def split_attentions(*, weight, bias, split, chunk_size):
weights = [None] * split
biases = [None] * split
weights_biases_idx = 0
for starting_row_index in range(0, weight.shape[0], chunk_size):
row_indices = torch.arange(starting_row_index, starting_row_index + chunk_size)
weight_rows = weight[row_indices, :]
bias_rows = bias[row_indices]
if weights[weights_biases_idx] is None:
assert weights[weights_biases_idx] is None
weights[weights_biases_idx] = weight_rows
biases[weights_biases_idx] = bias_rows
else:
assert weights[weights_biases_idx] is not None
weights[weights_biases_idx] = torch.concat([weights[weights_biases_idx], weight_rows])
biases[weights_biases_idx] = torch.concat([biases[weights_biases_idx], bias_rows])
weights_biases_idx = (weights_biases_idx + 1) % split
return weights, biases
# done unet utils
def prior(*, args, checkpoint_map_location):
print("loading prior")
prior_checkpoint = torch.load(args.prior_checkpoint_path, map_location=checkpoint_map_location)
clip_stats_checkpoint = torch.load(args.clip_stat_path, map_location=checkpoint_map_location)
prior_model = prior_model_from_original_config()
prior_diffusers_checkpoint = prior_original_checkpoint_to_diffusers_checkpoint(
prior_model, prior_checkpoint, clip_stats_checkpoint
)
del prior_checkpoint
del clip_stats_checkpoint
load_checkpoint_to_model(prior_diffusers_checkpoint, prior_model, strict=True)
print("done loading prior")
return prior_model
def text2img(*, args, checkpoint_map_location):
print("loading text2img")
text2img_checkpoint = torch.load(args.text2img_checkpoint_path, map_location=checkpoint_map_location)
unet_model = unet_model_from_original_config()
unet_diffusers_checkpoint = unet_original_checkpoint_to_diffusers_checkpoint(unet_model, text2img_checkpoint)
del text2img_checkpoint
load_checkpoint_to_model(unet_diffusers_checkpoint, unet_model, strict=True)
print("done loading text2img")
return unet_model
def inpaint_text2img(*, args, checkpoint_map_location):
print("loading inpaint text2img")
inpaint_text2img_checkpoint = torch.load(
args.inpaint_text2img_checkpoint_path, map_location=checkpoint_map_location
)
inpaint_unet_model = inpaint_unet_model_from_original_config()
inpaint_unet_diffusers_checkpoint = inpaint_unet_original_checkpoint_to_diffusers_checkpoint(
inpaint_unet_model, inpaint_text2img_checkpoint
)
del inpaint_text2img_checkpoint
load_checkpoint_to_model(inpaint_unet_diffusers_checkpoint, inpaint_unet_model, strict=True)
print("done loading inpaint text2img")
return inpaint_unet_model
# movq
MOVQ_CONFIG = {
"in_channels": 3,
"out_channels": 3,
"latent_channels": 4,
"down_block_types": ("DownEncoderBlock2D", "DownEncoderBlock2D", "DownEncoderBlock2D", "AttnDownEncoderBlock2D"),
"up_block_types": ("AttnUpDecoderBlock2D", "UpDecoderBlock2D", "UpDecoderBlock2D", "UpDecoderBlock2D"),
"num_vq_embeddings": 16384,
"block_out_channels": (128, 256, 256, 512),
"vq_embed_dim": 4,
"layers_per_block": 2,
"norm_type": "spatial",
}
def movq_model_from_original_config():
movq = VQModel(**MOVQ_CONFIG)
return movq
def movq_encoder_to_diffusers_checkpoint(model, checkpoint):
diffusers_checkpoint = {}
# conv_in
diffusers_checkpoint.update(
{
"encoder.conv_in.weight": checkpoint["encoder.conv_in.weight"],
"encoder.conv_in.bias": checkpoint["encoder.conv_in.bias"],
}
)
# down_blocks
for down_block_idx, down_block in enumerate(model.encoder.down_blocks):
diffusers_down_block_prefix = f"encoder.down_blocks.{down_block_idx}"
down_block_prefix = f"encoder.down.{down_block_idx}"
# resnets
for resnet_idx, resnet in enumerate(down_block.resnets):
diffusers_resnet_prefix = f"{diffusers_down_block_prefix}.resnets.{resnet_idx}"
resnet_prefix = f"{down_block_prefix}.block.{resnet_idx}"
diffusers_checkpoint.update(
movq_resnet_to_diffusers_checkpoint(
resnet, checkpoint, diffusers_resnet_prefix=diffusers_resnet_prefix, resnet_prefix=resnet_prefix
)
)
# downsample
# do not include the downsample when on the last down block
# There is no downsample on the last down block
if down_block_idx != len(model.encoder.down_blocks) - 1:
# There's a single downsample in the original checkpoint but a list of downsamples
# in the diffusers model.
diffusers_downsample_prefix = f"{diffusers_down_block_prefix}.downsamplers.0.conv"
downsample_prefix = f"{down_block_prefix}.downsample.conv"
diffusers_checkpoint.update(
{
f"{diffusers_downsample_prefix}.weight": checkpoint[f"{downsample_prefix}.weight"],
f"{diffusers_downsample_prefix}.bias": checkpoint[f"{downsample_prefix}.bias"],
}
)
# attentions
if hasattr(down_block, "attentions"):
for attention_idx, _ in enumerate(down_block.attentions):
diffusers_attention_prefix = f"{diffusers_down_block_prefix}.attentions.{attention_idx}"
attention_prefix = f"{down_block_prefix}.attn.{attention_idx}"
diffusers_checkpoint.update(
movq_attention_to_diffusers_checkpoint(
checkpoint,
diffusers_attention_prefix=diffusers_attention_prefix,
attention_prefix=attention_prefix,
)
)
# mid block
# mid block attentions
# There is a single hardcoded attention block in the middle of the VQ-diffusion encoder
diffusers_attention_prefix = "encoder.mid_block.attentions.0"
attention_prefix = "encoder.mid.attn_1"
diffusers_checkpoint.update(
movq_attention_to_diffusers_checkpoint(
checkpoint, diffusers_attention_prefix=diffusers_attention_prefix, attention_prefix=attention_prefix
)
)
# mid block resnets
for diffusers_resnet_idx, resnet in enumerate(model.encoder.mid_block.resnets):
diffusers_resnet_prefix = f"encoder.mid_block.resnets.{diffusers_resnet_idx}"
# the hardcoded prefixes to `block_` are 1 and 2
orig_resnet_idx = diffusers_resnet_idx + 1
# There are two hardcoded resnets in the middle of the VQ-diffusion encoder
resnet_prefix = f"encoder.mid.block_{orig_resnet_idx}"
diffusers_checkpoint.update(
movq_resnet_to_diffusers_checkpoint(
resnet, checkpoint, diffusers_resnet_prefix=diffusers_resnet_prefix, resnet_prefix=resnet_prefix
)
)
diffusers_checkpoint.update(
{
# conv_norm_out
"encoder.conv_norm_out.weight": checkpoint["encoder.norm_out.weight"],
"encoder.conv_norm_out.bias": checkpoint["encoder.norm_out.bias"],
# conv_out
"encoder.conv_out.weight": checkpoint["encoder.conv_out.weight"],
"encoder.conv_out.bias": checkpoint["encoder.conv_out.bias"],
}
)
return diffusers_checkpoint
def movq_decoder_to_diffusers_checkpoint(model, checkpoint):
diffusers_checkpoint = {}
# conv in
diffusers_checkpoint.update(
{
"decoder.conv_in.weight": checkpoint["decoder.conv_in.weight"],
"decoder.conv_in.bias": checkpoint["decoder.conv_in.bias"],
}
)
# up_blocks
for diffusers_up_block_idx, up_block in enumerate(model.decoder.up_blocks):
# up_blocks are stored in reverse order in the VQ-diffusion checkpoint
orig_up_block_idx = len(model.decoder.up_blocks) - 1 - diffusers_up_block_idx
diffusers_up_block_prefix = f"decoder.up_blocks.{diffusers_up_block_idx}"
up_block_prefix = f"decoder.up.{orig_up_block_idx}"
# resnets
for resnet_idx, resnet in enumerate(up_block.resnets):
diffusers_resnet_prefix = f"{diffusers_up_block_prefix}.resnets.{resnet_idx}"
resnet_prefix = f"{up_block_prefix}.block.{resnet_idx}"
diffusers_checkpoint.update(
movq_resnet_to_diffusers_checkpoint_spatial_norm(
resnet, checkpoint, diffusers_resnet_prefix=diffusers_resnet_prefix, resnet_prefix=resnet_prefix
)
)
# upsample
# there is no up sample on the last up block
if diffusers_up_block_idx != len(model.decoder.up_blocks) - 1:
# There's a single upsample in the VQ-diffusion checkpoint but a list of downsamples
# in the diffusers model.
diffusers_downsample_prefix = f"{diffusers_up_block_prefix}.upsamplers.0.conv"
downsample_prefix = f"{up_block_prefix}.upsample.conv"
diffusers_checkpoint.update(
{
f"{diffusers_downsample_prefix}.weight": checkpoint[f"{downsample_prefix}.weight"],
f"{diffusers_downsample_prefix}.bias": checkpoint[f"{downsample_prefix}.bias"],
}
)
# attentions
if hasattr(up_block, "attentions"):
for attention_idx, _ in enumerate(up_block.attentions):
diffusers_attention_prefix = f"{diffusers_up_block_prefix}.attentions.{attention_idx}"
attention_prefix = f"{up_block_prefix}.attn.{attention_idx}"
diffusers_checkpoint.update(
movq_attention_to_diffusers_checkpoint_spatial_norm(
checkpoint,
diffusers_attention_prefix=diffusers_attention_prefix,
attention_prefix=attention_prefix,
)
)
# mid block
# mid block attentions
# There is a single hardcoded attention block in the middle of the VQ-diffusion decoder
diffusers_attention_prefix = "decoder.mid_block.attentions.0"
attention_prefix = "decoder.mid.attn_1"
diffusers_checkpoint.update(
movq_attention_to_diffusers_checkpoint_spatial_norm(
checkpoint, diffusers_attention_prefix=diffusers_attention_prefix, attention_prefix=attention_prefix
)
)
# mid block resnets
for diffusers_resnet_idx, resnet in enumerate(model.encoder.mid_block.resnets):
diffusers_resnet_prefix = f"decoder.mid_block.resnets.{diffusers_resnet_idx}"
# the hardcoded prefixes to `block_` are 1 and 2
orig_resnet_idx = diffusers_resnet_idx + 1
# There are two hardcoded resnets in the middle of the VQ-diffusion decoder
resnet_prefix = f"decoder.mid.block_{orig_resnet_idx}"
diffusers_checkpoint.update(
movq_resnet_to_diffusers_checkpoint_spatial_norm(
resnet, checkpoint, diffusers_resnet_prefix=diffusers_resnet_prefix, resnet_prefix=resnet_prefix
)
)
diffusers_checkpoint.update(
{
# conv_norm_out
"decoder.conv_norm_out.norm_layer.weight": checkpoint["decoder.norm_out.norm_layer.weight"],
"decoder.conv_norm_out.norm_layer.bias": checkpoint["decoder.norm_out.norm_layer.bias"],
"decoder.conv_norm_out.conv_y.weight": checkpoint["decoder.norm_out.conv_y.weight"],
"decoder.conv_norm_out.conv_y.bias": checkpoint["decoder.norm_out.conv_y.bias"],
"decoder.conv_norm_out.conv_b.weight": checkpoint["decoder.norm_out.conv_b.weight"],
"decoder.conv_norm_out.conv_b.bias": checkpoint["decoder.norm_out.conv_b.bias"],
# conv_out
"decoder.conv_out.weight": checkpoint["decoder.conv_out.weight"],
"decoder.conv_out.bias": checkpoint["decoder.conv_out.bias"],
}
)
return diffusers_checkpoint
def movq_resnet_to_diffusers_checkpoint(resnet, checkpoint, *, diffusers_resnet_prefix, resnet_prefix):
rv = {
# norm1
f"{diffusers_resnet_prefix}.norm1.weight": checkpoint[f"{resnet_prefix}.norm1.weight"],
f"{diffusers_resnet_prefix}.norm1.bias": checkpoint[f"{resnet_prefix}.norm1.bias"],
# conv1
f"{diffusers_resnet_prefix}.conv1.weight": checkpoint[f"{resnet_prefix}.conv1.weight"],
f"{diffusers_resnet_prefix}.conv1.bias": checkpoint[f"{resnet_prefix}.conv1.bias"],
# norm2
f"{diffusers_resnet_prefix}.norm2.weight": checkpoint[f"{resnet_prefix}.norm2.weight"],
f"{diffusers_resnet_prefix}.norm2.bias": checkpoint[f"{resnet_prefix}.norm2.bias"],
# conv2
f"{diffusers_resnet_prefix}.conv2.weight": checkpoint[f"{resnet_prefix}.conv2.weight"],
f"{diffusers_resnet_prefix}.conv2.bias": checkpoint[f"{resnet_prefix}.conv2.bias"],
}
if resnet.conv_shortcut is not None:
rv.update(
{
f"{diffusers_resnet_prefix}.conv_shortcut.weight": checkpoint[f"{resnet_prefix}.nin_shortcut.weight"],
f"{diffusers_resnet_prefix}.conv_shortcut.bias": checkpoint[f"{resnet_prefix}.nin_shortcut.bias"],
}
)
return rv
def movq_resnet_to_diffusers_checkpoint_spatial_norm(resnet, checkpoint, *, diffusers_resnet_prefix, resnet_prefix):
rv = {
# norm1
f"{diffusers_resnet_prefix}.norm1.norm_layer.weight": checkpoint[f"{resnet_prefix}.norm1.norm_layer.weight"],
f"{diffusers_resnet_prefix}.norm1.norm_layer.bias": checkpoint[f"{resnet_prefix}.norm1.norm_layer.bias"],
f"{diffusers_resnet_prefix}.norm1.conv_y.weight": checkpoint[f"{resnet_prefix}.norm1.conv_y.weight"],
f"{diffusers_resnet_prefix}.norm1.conv_y.bias": checkpoint[f"{resnet_prefix}.norm1.conv_y.bias"],
f"{diffusers_resnet_prefix}.norm1.conv_b.weight": checkpoint[f"{resnet_prefix}.norm1.conv_b.weight"],
f"{diffusers_resnet_prefix}.norm1.conv_b.bias": checkpoint[f"{resnet_prefix}.norm1.conv_b.bias"],
# conv1
f"{diffusers_resnet_prefix}.conv1.weight": checkpoint[f"{resnet_prefix}.conv1.weight"],
f"{diffusers_resnet_prefix}.conv1.bias": checkpoint[f"{resnet_prefix}.conv1.bias"],
# norm2
f"{diffusers_resnet_prefix}.norm2.norm_layer.weight": checkpoint[f"{resnet_prefix}.norm2.norm_layer.weight"],
f"{diffusers_resnet_prefix}.norm2.norm_layer.bias": checkpoint[f"{resnet_prefix}.norm2.norm_layer.bias"],
f"{diffusers_resnet_prefix}.norm2.conv_y.weight": checkpoint[f"{resnet_prefix}.norm2.conv_y.weight"],
f"{diffusers_resnet_prefix}.norm2.conv_y.bias": checkpoint[f"{resnet_prefix}.norm2.conv_y.bias"],
f"{diffusers_resnet_prefix}.norm2.conv_b.weight": checkpoint[f"{resnet_prefix}.norm2.conv_b.weight"],
f"{diffusers_resnet_prefix}.norm2.conv_b.bias": checkpoint[f"{resnet_prefix}.norm2.conv_b.bias"],
# conv2
f"{diffusers_resnet_prefix}.conv2.weight": checkpoint[f"{resnet_prefix}.conv2.weight"],
f"{diffusers_resnet_prefix}.conv2.bias": checkpoint[f"{resnet_prefix}.conv2.bias"],
}
if resnet.conv_shortcut is not None:
rv.update(
{
f"{diffusers_resnet_prefix}.conv_shortcut.weight": checkpoint[f"{resnet_prefix}.nin_shortcut.weight"],
f"{diffusers_resnet_prefix}.conv_shortcut.bias": checkpoint[f"{resnet_prefix}.nin_shortcut.bias"],
}
)
return rv
def movq_attention_to_diffusers_checkpoint(checkpoint, *, diffusers_attention_prefix, attention_prefix):
return {
# norm
f"{diffusers_attention_prefix}.group_norm.weight": checkpoint[f"{attention_prefix}.norm.weight"],
f"{diffusers_attention_prefix}.group_norm.bias": checkpoint[f"{attention_prefix}.norm.bias"],
# query
f"{diffusers_attention_prefix}.to_q.weight": checkpoint[f"{attention_prefix}.q.weight"][:, :, 0, 0],
f"{diffusers_attention_prefix}.to_q.bias": checkpoint[f"{attention_prefix}.q.bias"],
# key
f"{diffusers_attention_prefix}.to_k.weight": checkpoint[f"{attention_prefix}.k.weight"][:, :, 0, 0],
f"{diffusers_attention_prefix}.to_k.bias": checkpoint[f"{attention_prefix}.k.bias"],
# value
f"{diffusers_attention_prefix}.to_v.weight": checkpoint[f"{attention_prefix}.v.weight"][:, :, 0, 0],
f"{diffusers_attention_prefix}.to_v.bias": checkpoint[f"{attention_prefix}.v.bias"],
# proj_attn
f"{diffusers_attention_prefix}.to_out.0.weight": checkpoint[f"{attention_prefix}.proj_out.weight"][:, :, 0, 0],
f"{diffusers_attention_prefix}.to_out.0.bias": checkpoint[f"{attention_prefix}.proj_out.bias"],
}
def movq_attention_to_diffusers_checkpoint_spatial_norm(checkpoint, *, diffusers_attention_prefix, attention_prefix):
return {
# norm
f"{diffusers_attention_prefix}.spatial_norm.norm_layer.weight": checkpoint[
f"{attention_prefix}.norm.norm_layer.weight"
],
f"{diffusers_attention_prefix}.spatial_norm.norm_layer.bias": checkpoint[
f"{attention_prefix}.norm.norm_layer.bias"
],
f"{diffusers_attention_prefix}.spatial_norm.conv_y.weight": checkpoint[
f"{attention_prefix}.norm.conv_y.weight"
],
f"{diffusers_attention_prefix}.spatial_norm.conv_y.bias": checkpoint[f"{attention_prefix}.norm.conv_y.bias"],
f"{diffusers_attention_prefix}.spatial_norm.conv_b.weight": checkpoint[
f"{attention_prefix}.norm.conv_b.weight"
],
f"{diffusers_attention_prefix}.spatial_norm.conv_b.bias": checkpoint[f"{attention_prefix}.norm.conv_b.bias"],
# query
f"{diffusers_attention_prefix}.to_q.weight": checkpoint[f"{attention_prefix}.q.weight"][:, :, 0, 0],
f"{diffusers_attention_prefix}.to_q.bias": checkpoint[f"{attention_prefix}.q.bias"],
# key
f"{diffusers_attention_prefix}.to_k.weight": checkpoint[f"{attention_prefix}.k.weight"][:, :, 0, 0],
f"{diffusers_attention_prefix}.to_k.bias": checkpoint[f"{attention_prefix}.k.bias"],
# value
f"{diffusers_attention_prefix}.to_v.weight": checkpoint[f"{attention_prefix}.v.weight"][:, :, 0, 0],
f"{diffusers_attention_prefix}.to_v.bias": checkpoint[f"{attention_prefix}.v.bias"],
# proj_attn
f"{diffusers_attention_prefix}.to_out.0.weight": checkpoint[f"{attention_prefix}.proj_out.weight"][:, :, 0, 0],
f"{diffusers_attention_prefix}.to_out.0.bias": checkpoint[f"{attention_prefix}.proj_out.bias"],
}
def movq_original_checkpoint_to_diffusers_checkpoint(model, checkpoint):
diffusers_checkpoint = {}
diffusers_checkpoint.update(movq_encoder_to_diffusers_checkpoint(model, checkpoint))
# quant_conv
diffusers_checkpoint.update(
{
"quant_conv.weight": checkpoint["quant_conv.weight"],
"quant_conv.bias": checkpoint["quant_conv.bias"],
}
)
# quantize
diffusers_checkpoint.update({"quantize.embedding.weight": checkpoint["quantize.embedding.weight"]})
# post_quant_conv
diffusers_checkpoint.update(
{
"post_quant_conv.weight": checkpoint["post_quant_conv.weight"],
"post_quant_conv.bias": checkpoint["post_quant_conv.bias"],
}
)
# decoder
diffusers_checkpoint.update(movq_decoder_to_diffusers_checkpoint(model, checkpoint))
return diffusers_checkpoint
def movq(*, args, checkpoint_map_location):
print("loading movq")
movq_checkpoint = torch.load(args.movq_checkpoint_path, map_location=checkpoint_map_location)
movq_model = movq_model_from_original_config()
movq_diffusers_checkpoint = movq_original_checkpoint_to_diffusers_checkpoint(movq_model, movq_checkpoint)
del movq_checkpoint
load_checkpoint_to_model(movq_diffusers_checkpoint, movq_model, strict=True)
print("done loading movq")
return movq_model
def load_checkpoint_to_model(checkpoint, model, strict=False):
with tempfile.NamedTemporaryFile(delete=False) as file:
torch.save(checkpoint, file.name)
del checkpoint
if strict:
model.load_state_dict(torch.load(file.name), strict=True)
else:
load_checkpoint_and_dispatch(model, file.name, device_map="auto")
os.remove(file.name)
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument("--dump_path", default=None, type=str, required=True, help="Path to the output model.")
parser.add_argument(
"--prior_checkpoint_path",
default=None,
type=str,
required=False,
help="Path to the prior checkpoint to convert.",
)
parser.add_argument(
"--clip_stat_path",
default=None,
type=str,
required=False,
help="Path to the clip stats checkpoint to convert.",
)
parser.add_argument(
"--text2img_checkpoint_path",
default=None,
type=str,
required=False,
help="Path to the text2img checkpoint to convert.",
)
parser.add_argument(
"--movq_checkpoint_path",
default=None,
type=str,
required=False,
help="Path to the text2img checkpoint to convert.",
)
parser.add_argument(
"--inpaint_text2img_checkpoint_path",
default=None,
type=str,
required=False,
help="Path to the inpaint text2img checkpoint to convert.",
)
parser.add_argument(
"--checkpoint_load_device",
default="cpu",
type=str,
required=False,
help="The device passed to `map_location` when loading checkpoints.",
)
parser.add_argument(
"--debug",
default=None,
type=str,
required=False,
help="Only run a specific stage of the convert script. Used for debugging",
)
args = parser.parse_args()
print(f"loading checkpoints to {args.checkpoint_load_device}")
checkpoint_map_location = torch.device(args.checkpoint_load_device)
if args.debug is not None:
print(f"debug: only executing {args.debug}")
if args.debug is None:
print("to-do")
elif args.debug == "prior":
prior_model = prior(args=args, checkpoint_map_location=checkpoint_map_location)
prior_model.save_pretrained(args.dump_path)
elif args.debug == "text2img":
unet_model = text2img(args=args, checkpoint_map_location=checkpoint_map_location)
unet_model.save_pretrained(f"{args.dump_path}/unet")
elif args.debug == "inpaint_text2img":
inpaint_unet_model = inpaint_text2img(args=args, checkpoint_map_location=checkpoint_map_location)
inpaint_unet_model.save_pretrained(f"{args.dump_path}/inpaint_unet")
elif args.debug == "decoder":
decoder = movq(args=args, checkpoint_map_location=checkpoint_map_location)
decoder.save_pretrained(f"{args.dump_path}/decoder")
else:
raise ValueError(f"unknown debug value : {args.debug}")
| 0 |
hf_public_repos/diffusers | hf_public_repos/diffusers/scripts/convert_ms_text_to_video_to_diffusers.py | # coding=utf-8
# Copyright 2023 The HuggingFace Inc. team.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
""" Conversion script for the LDM checkpoints. """
import argparse
import torch
from diffusers import UNet3DConditionModel
def assign_to_checkpoint(
paths, checkpoint, old_checkpoint, attention_paths_to_split=None, additional_replacements=None, config=None
):
"""
This does the final conversion step: take locally converted weights and apply a global renaming to them. It splits
attention layers, and takes into account additional replacements that may arise.
Assigns the weights to the new checkpoint.
"""
assert isinstance(paths, list), "Paths should be a list of dicts containing 'old' and 'new' keys."
# Splits the attention layers into three variables.
if attention_paths_to_split is not None:
for path, path_map in attention_paths_to_split.items():
old_tensor = old_checkpoint[path]
channels = old_tensor.shape[0] // 3
target_shape = (-1, channels) if len(old_tensor.shape) == 3 else (-1)
num_heads = old_tensor.shape[0] // config["num_head_channels"] // 3
old_tensor = old_tensor.reshape((num_heads, 3 * channels // num_heads) + old_tensor.shape[1:])
query, key, value = old_tensor.split(channels // num_heads, dim=1)
checkpoint[path_map["query"]] = query.reshape(target_shape)
checkpoint[path_map["key"]] = key.reshape(target_shape)
checkpoint[path_map["value"]] = value.reshape(target_shape)
for path in paths:
new_path = path["new"]
# These have already been assigned
if attention_paths_to_split is not None and new_path in attention_paths_to_split:
continue
if additional_replacements is not None:
for replacement in additional_replacements:
new_path = new_path.replace(replacement["old"], replacement["new"])
# proj_attn.weight has to be converted from conv 1D to linear
weight = old_checkpoint[path["old"]]
names = ["proj_attn.weight"]
names_2 = ["proj_out.weight", "proj_in.weight"]
if any(k in new_path for k in names):
checkpoint[new_path] = weight[:, :, 0]
elif any(k in new_path for k in names_2) and len(weight.shape) > 2 and ".attentions." not in new_path:
checkpoint[new_path] = weight[:, :, 0]
else:
checkpoint[new_path] = weight
def renew_attention_paths(old_list, n_shave_prefix_segments=0):
"""
Updates paths inside attentions to the new naming scheme (local renaming)
"""
mapping = []
for old_item in old_list:
new_item = old_item
# new_item = new_item.replace('norm.weight', 'group_norm.weight')
# new_item = new_item.replace('norm.bias', 'group_norm.bias')
# new_item = new_item.replace('proj_out.weight', 'proj_attn.weight')
# new_item = new_item.replace('proj_out.bias', 'proj_attn.bias')
# new_item = shave_segments(new_item, n_shave_prefix_segments=n_shave_prefix_segments)
mapping.append({"old": old_item, "new": new_item})
return mapping
def shave_segments(path, n_shave_prefix_segments=1):
"""
Removes segments. Positive values shave the first segments, negative shave the last segments.
"""
if n_shave_prefix_segments >= 0:
return ".".join(path.split(".")[n_shave_prefix_segments:])
else:
return ".".join(path.split(".")[:n_shave_prefix_segments])
def renew_temp_conv_paths(old_list, n_shave_prefix_segments=0):
"""
Updates paths inside resnets to the new naming scheme (local renaming)
"""
mapping = []
for old_item in old_list:
mapping.append({"old": old_item, "new": old_item})
return mapping
def renew_resnet_paths(old_list, n_shave_prefix_segments=0):
"""
Updates paths inside resnets to the new naming scheme (local renaming)
"""
mapping = []
for old_item in old_list:
new_item = old_item.replace("in_layers.0", "norm1")
new_item = new_item.replace("in_layers.2", "conv1")
new_item = new_item.replace("out_layers.0", "norm2")
new_item = new_item.replace("out_layers.3", "conv2")
new_item = new_item.replace("emb_layers.1", "time_emb_proj")
new_item = new_item.replace("skip_connection", "conv_shortcut")
new_item = shave_segments(new_item, n_shave_prefix_segments=n_shave_prefix_segments)
if "temopral_conv" not in old_item:
mapping.append({"old": old_item, "new": new_item})
return mapping
def convert_ldm_unet_checkpoint(checkpoint, config, path=None, extract_ema=False):
"""
Takes a state dict and a config, and returns a converted checkpoint.
"""
# extract state_dict for UNet
unet_state_dict = {}
keys = list(checkpoint.keys())
unet_key = "model.diffusion_model."
# at least a 100 parameters have to start with `model_ema` in order for the checkpoint to be EMA
if sum(k.startswith("model_ema") for k in keys) > 100 and extract_ema:
print(f"Checkpoint {path} has both EMA and non-EMA weights.")
print(
"In this conversion only the EMA weights are extracted. If you want to instead extract the non-EMA"
" weights (useful to continue fine-tuning), please make sure to remove the `--extract_ema` flag."
)
for key in keys:
if key.startswith("model.diffusion_model"):
flat_ema_key = "model_ema." + "".join(key.split(".")[1:])
unet_state_dict[key.replace(unet_key, "")] = checkpoint.pop(flat_ema_key)
else:
if sum(k.startswith("model_ema") for k in keys) > 100:
print(
"In this conversion only the non-EMA weights are extracted. If you want to instead extract the EMA"
" weights (usually better for inference), please make sure to add the `--extract_ema` flag."
)
for key in keys:
unet_state_dict[key.replace(unet_key, "")] = checkpoint.pop(key)
new_checkpoint = {}
new_checkpoint["time_embedding.linear_1.weight"] = unet_state_dict["time_embed.0.weight"]
new_checkpoint["time_embedding.linear_1.bias"] = unet_state_dict["time_embed.0.bias"]
new_checkpoint["time_embedding.linear_2.weight"] = unet_state_dict["time_embed.2.weight"]
new_checkpoint["time_embedding.linear_2.bias"] = unet_state_dict["time_embed.2.bias"]
if config["class_embed_type"] is None:
# No parameters to port
...
elif config["class_embed_type"] == "timestep" or config["class_embed_type"] == "projection":
new_checkpoint["class_embedding.linear_1.weight"] = unet_state_dict["label_emb.0.0.weight"]
new_checkpoint["class_embedding.linear_1.bias"] = unet_state_dict["label_emb.0.0.bias"]
new_checkpoint["class_embedding.linear_2.weight"] = unet_state_dict["label_emb.0.2.weight"]
new_checkpoint["class_embedding.linear_2.bias"] = unet_state_dict["label_emb.0.2.bias"]
else:
raise NotImplementedError(f"Not implemented `class_embed_type`: {config['class_embed_type']}")
new_checkpoint["conv_in.weight"] = unet_state_dict["input_blocks.0.0.weight"]
new_checkpoint["conv_in.bias"] = unet_state_dict["input_blocks.0.0.bias"]
first_temp_attention = [v for v in unet_state_dict if v.startswith("input_blocks.0.1")]
paths = renew_attention_paths(first_temp_attention)
meta_path = {"old": "input_blocks.0.1", "new": "transformer_in"}
assign_to_checkpoint(paths, new_checkpoint, unet_state_dict, additional_replacements=[meta_path], config=config)
new_checkpoint["conv_norm_out.weight"] = unet_state_dict["out.0.weight"]
new_checkpoint["conv_norm_out.bias"] = unet_state_dict["out.0.bias"]
new_checkpoint["conv_out.weight"] = unet_state_dict["out.2.weight"]
new_checkpoint["conv_out.bias"] = unet_state_dict["out.2.bias"]
# Retrieves the keys for the input blocks only
num_input_blocks = len({".".join(layer.split(".")[:2]) for layer in unet_state_dict if "input_blocks" in layer})
input_blocks = {
layer_id: [key for key in unet_state_dict if f"input_blocks.{layer_id}" in key]
for layer_id in range(num_input_blocks)
}
# Retrieves the keys for the middle blocks only
num_middle_blocks = len({".".join(layer.split(".")[:2]) for layer in unet_state_dict if "middle_block" in layer})
middle_blocks = {
layer_id: [key for key in unet_state_dict if f"middle_block.{layer_id}" in key]
for layer_id in range(num_middle_blocks)
}
# Retrieves the keys for the output blocks only
num_output_blocks = len({".".join(layer.split(".")[:2]) for layer in unet_state_dict if "output_blocks" in layer})
output_blocks = {
layer_id: [key for key in unet_state_dict if f"output_blocks.{layer_id}" in key]
for layer_id in range(num_output_blocks)
}
for i in range(1, num_input_blocks):
block_id = (i - 1) // (config["layers_per_block"] + 1)
layer_in_block_id = (i - 1) % (config["layers_per_block"] + 1)
resnets = [
key for key in input_blocks[i] if f"input_blocks.{i}.0" in key and f"input_blocks.{i}.0.op" not in key
]
attentions = [key for key in input_blocks[i] if f"input_blocks.{i}.1" in key]
temp_attentions = [key for key in input_blocks[i] if f"input_blocks.{i}.2" in key]
if f"input_blocks.{i}.op.weight" in unet_state_dict:
new_checkpoint[f"down_blocks.{block_id}.downsamplers.0.conv.weight"] = unet_state_dict.pop(
f"input_blocks.{i}.op.weight"
)
new_checkpoint[f"down_blocks.{block_id}.downsamplers.0.conv.bias"] = unet_state_dict.pop(
f"input_blocks.{i}.op.bias"
)
paths = renew_resnet_paths(resnets)
meta_path = {"old": f"input_blocks.{i}.0", "new": f"down_blocks.{block_id}.resnets.{layer_in_block_id}"}
assign_to_checkpoint(
paths, new_checkpoint, unet_state_dict, additional_replacements=[meta_path], config=config
)
temporal_convs = [key for key in resnets if "temopral_conv" in key]
paths = renew_temp_conv_paths(temporal_convs)
meta_path = {
"old": f"input_blocks.{i}.0.temopral_conv",
"new": f"down_blocks.{block_id}.temp_convs.{layer_in_block_id}",
}
assign_to_checkpoint(
paths, new_checkpoint, unet_state_dict, additional_replacements=[meta_path], config=config
)
if len(attentions):
paths = renew_attention_paths(attentions)
meta_path = {"old": f"input_blocks.{i}.1", "new": f"down_blocks.{block_id}.attentions.{layer_in_block_id}"}
assign_to_checkpoint(
paths, new_checkpoint, unet_state_dict, additional_replacements=[meta_path], config=config
)
if len(temp_attentions):
paths = renew_attention_paths(temp_attentions)
meta_path = {
"old": f"input_blocks.{i}.2",
"new": f"down_blocks.{block_id}.temp_attentions.{layer_in_block_id}",
}
assign_to_checkpoint(
paths, new_checkpoint, unet_state_dict, additional_replacements=[meta_path], config=config
)
resnet_0 = middle_blocks[0]
temporal_convs_0 = [key for key in resnet_0 if "temopral_conv" in key]
attentions = middle_blocks[1]
temp_attentions = middle_blocks[2]
resnet_1 = middle_blocks[3]
temporal_convs_1 = [key for key in resnet_1 if "temopral_conv" in key]
resnet_0_paths = renew_resnet_paths(resnet_0)
meta_path = {"old": "middle_block.0", "new": "mid_block.resnets.0"}
assign_to_checkpoint(
resnet_0_paths, new_checkpoint, unet_state_dict, config=config, additional_replacements=[meta_path]
)
temp_conv_0_paths = renew_temp_conv_paths(temporal_convs_0)
meta_path = {"old": "middle_block.0.temopral_conv", "new": "mid_block.temp_convs.0"}
assign_to_checkpoint(
temp_conv_0_paths, new_checkpoint, unet_state_dict, config=config, additional_replacements=[meta_path]
)
resnet_1_paths = renew_resnet_paths(resnet_1)
meta_path = {"old": "middle_block.3", "new": "mid_block.resnets.1"}
assign_to_checkpoint(
resnet_1_paths, new_checkpoint, unet_state_dict, config=config, additional_replacements=[meta_path]
)
temp_conv_1_paths = renew_temp_conv_paths(temporal_convs_1)
meta_path = {"old": "middle_block.3.temopral_conv", "new": "mid_block.temp_convs.1"}
assign_to_checkpoint(
temp_conv_1_paths, new_checkpoint, unet_state_dict, config=config, additional_replacements=[meta_path]
)
attentions_paths = renew_attention_paths(attentions)
meta_path = {"old": "middle_block.1", "new": "mid_block.attentions.0"}
assign_to_checkpoint(
attentions_paths, new_checkpoint, unet_state_dict, additional_replacements=[meta_path], config=config
)
temp_attentions_paths = renew_attention_paths(temp_attentions)
meta_path = {"old": "middle_block.2", "new": "mid_block.temp_attentions.0"}
assign_to_checkpoint(
temp_attentions_paths, new_checkpoint, unet_state_dict, additional_replacements=[meta_path], config=config
)
for i in range(num_output_blocks):
block_id = i // (config["layers_per_block"] + 1)
layer_in_block_id = i % (config["layers_per_block"] + 1)
output_block_layers = [shave_segments(name, 2) for name in output_blocks[i]]
output_block_list = {}
for layer in output_block_layers:
layer_id, layer_name = layer.split(".")[0], shave_segments(layer, 1)
if layer_id in output_block_list:
output_block_list[layer_id].append(layer_name)
else:
output_block_list[layer_id] = [layer_name]
if len(output_block_list) > 1:
resnets = [key for key in output_blocks[i] if f"output_blocks.{i}.0" in key]
attentions = [key for key in output_blocks[i] if f"output_blocks.{i}.1" in key]
temp_attentions = [key for key in output_blocks[i] if f"output_blocks.{i}.2" in key]
resnet_0_paths = renew_resnet_paths(resnets)
paths = renew_resnet_paths(resnets)
meta_path = {"old": f"output_blocks.{i}.0", "new": f"up_blocks.{block_id}.resnets.{layer_in_block_id}"}
assign_to_checkpoint(
paths, new_checkpoint, unet_state_dict, additional_replacements=[meta_path], config=config
)
temporal_convs = [key for key in resnets if "temopral_conv" in key]
paths = renew_temp_conv_paths(temporal_convs)
meta_path = {
"old": f"output_blocks.{i}.0.temopral_conv",
"new": f"up_blocks.{block_id}.temp_convs.{layer_in_block_id}",
}
assign_to_checkpoint(
paths, new_checkpoint, unet_state_dict, additional_replacements=[meta_path], config=config
)
output_block_list = {k: sorted(v) for k, v in output_block_list.items()}
if ["conv.bias", "conv.weight"] in output_block_list.values():
index = list(output_block_list.values()).index(["conv.bias", "conv.weight"])
new_checkpoint[f"up_blocks.{block_id}.upsamplers.0.conv.weight"] = unet_state_dict[
f"output_blocks.{i}.{index}.conv.weight"
]
new_checkpoint[f"up_blocks.{block_id}.upsamplers.0.conv.bias"] = unet_state_dict[
f"output_blocks.{i}.{index}.conv.bias"
]
# Clear attentions as they have been attributed above.
if len(attentions) == 2:
attentions = []
if len(attentions):
paths = renew_attention_paths(attentions)
meta_path = {
"old": f"output_blocks.{i}.1",
"new": f"up_blocks.{block_id}.attentions.{layer_in_block_id}",
}
assign_to_checkpoint(
paths, new_checkpoint, unet_state_dict, additional_replacements=[meta_path], config=config
)
if len(temp_attentions):
paths = renew_attention_paths(temp_attentions)
meta_path = {
"old": f"output_blocks.{i}.2",
"new": f"up_blocks.{block_id}.temp_attentions.{layer_in_block_id}",
}
assign_to_checkpoint(
paths, new_checkpoint, unet_state_dict, additional_replacements=[meta_path], config=config
)
else:
resnet_0_paths = renew_resnet_paths(output_block_layers, n_shave_prefix_segments=1)
for path in resnet_0_paths:
old_path = ".".join(["output_blocks", str(i), path["old"]])
new_path = ".".join(["up_blocks", str(block_id), "resnets", str(layer_in_block_id), path["new"]])
new_checkpoint[new_path] = unet_state_dict[old_path]
temopral_conv_paths = [l for l in output_block_layers if "temopral_conv" in l]
for path in temopral_conv_paths:
pruned_path = path.split("temopral_conv.")[-1]
old_path = ".".join(["output_blocks", str(i), str(block_id), "temopral_conv", pruned_path])
new_path = ".".join(["up_blocks", str(block_id), "temp_convs", str(layer_in_block_id), pruned_path])
new_checkpoint[new_path] = unet_state_dict[old_path]
return new_checkpoint
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument(
"--checkpoint_path", default=None, type=str, required=True, help="Path to the checkpoint to convert."
)
parser.add_argument("--dump_path", default=None, type=str, required=True, help="Path to the output model.")
args = parser.parse_args()
unet_checkpoint = torch.load(args.checkpoint_path, map_location="cpu")
unet = UNet3DConditionModel()
converted_ckpt = convert_ldm_unet_checkpoint(unet_checkpoint, unet.config)
diff_0 = set(unet.state_dict().keys()) - set(converted_ckpt.keys())
diff_1 = set(converted_ckpt.keys()) - set(unet.state_dict().keys())
assert len(diff_0) == len(diff_1) == 0, "Converted weights don't match"
# load state_dict
unet.load_state_dict(converted_ckpt)
unet.save_pretrained(args.dump_path)
# -- finish converting the unet --
| 0 |
hf_public_repos/diffusers | hf_public_repos/diffusers/scripts/convert_ddpm_original_checkpoint_to_diffusers.py | import argparse
import json
import torch
from diffusers import AutoencoderKL, DDPMPipeline, DDPMScheduler, UNet2DModel, VQModel
def shave_segments(path, n_shave_prefix_segments=1):
"""
Removes segments. Positive values shave the first segments, negative shave the last segments.
"""
if n_shave_prefix_segments >= 0:
return ".".join(path.split(".")[n_shave_prefix_segments:])
else:
return ".".join(path.split(".")[:n_shave_prefix_segments])
def renew_resnet_paths(old_list, n_shave_prefix_segments=0):
mapping = []
for old_item in old_list:
new_item = old_item
new_item = new_item.replace("block.", "resnets.")
new_item = new_item.replace("conv_shorcut", "conv1")
new_item = new_item.replace("in_shortcut", "conv_shortcut")
new_item = new_item.replace("temb_proj", "time_emb_proj")
new_item = shave_segments(new_item, n_shave_prefix_segments=n_shave_prefix_segments)
mapping.append({"old": old_item, "new": new_item})
return mapping
def renew_attention_paths(old_list, n_shave_prefix_segments=0, in_mid=False):
mapping = []
for old_item in old_list:
new_item = old_item
# In `model.mid`, the layer is called `attn`.
if not in_mid:
new_item = new_item.replace("attn", "attentions")
new_item = new_item.replace(".k.", ".key.")
new_item = new_item.replace(".v.", ".value.")
new_item = new_item.replace(".q.", ".query.")
new_item = new_item.replace("proj_out", "proj_attn")
new_item = new_item.replace("norm", "group_norm")
new_item = shave_segments(new_item, n_shave_prefix_segments=n_shave_prefix_segments)
mapping.append({"old": old_item, "new": new_item})
return mapping
def assign_to_checkpoint(
paths, checkpoint, old_checkpoint, attention_paths_to_split=None, additional_replacements=None, config=None
):
assert isinstance(paths, list), "Paths should be a list of dicts containing 'old' and 'new' keys."
if attention_paths_to_split is not None:
if config is None:
raise ValueError("Please specify the config if setting 'attention_paths_to_split' to 'True'.")
for path, path_map in attention_paths_to_split.items():
old_tensor = old_checkpoint[path]
channels = old_tensor.shape[0] // 3
target_shape = (-1, channels) if len(old_tensor.shape) == 3 else (-1)
num_heads = old_tensor.shape[0] // config.get("num_head_channels", 1) // 3
old_tensor = old_tensor.reshape((num_heads, 3 * channels // num_heads) + old_tensor.shape[1:])
query, key, value = old_tensor.split(channels // num_heads, dim=1)
checkpoint[path_map["query"]] = query.reshape(target_shape).squeeze()
checkpoint[path_map["key"]] = key.reshape(target_shape).squeeze()
checkpoint[path_map["value"]] = value.reshape(target_shape).squeeze()
for path in paths:
new_path = path["new"]
if attention_paths_to_split is not None and new_path in attention_paths_to_split:
continue
new_path = new_path.replace("down.", "down_blocks.")
new_path = new_path.replace("up.", "up_blocks.")
if additional_replacements is not None:
for replacement in additional_replacements:
new_path = new_path.replace(replacement["old"], replacement["new"])
if "attentions" in new_path:
checkpoint[new_path] = old_checkpoint[path["old"]].squeeze()
else:
checkpoint[new_path] = old_checkpoint[path["old"]]
def convert_ddpm_checkpoint(checkpoint, config):
"""
Takes a state dict and a config, and returns a converted checkpoint.
"""
new_checkpoint = {}
new_checkpoint["time_embedding.linear_1.weight"] = checkpoint["temb.dense.0.weight"]
new_checkpoint["time_embedding.linear_1.bias"] = checkpoint["temb.dense.0.bias"]
new_checkpoint["time_embedding.linear_2.weight"] = checkpoint["temb.dense.1.weight"]
new_checkpoint["time_embedding.linear_2.bias"] = checkpoint["temb.dense.1.bias"]
new_checkpoint["conv_norm_out.weight"] = checkpoint["norm_out.weight"]
new_checkpoint["conv_norm_out.bias"] = checkpoint["norm_out.bias"]
new_checkpoint["conv_in.weight"] = checkpoint["conv_in.weight"]
new_checkpoint["conv_in.bias"] = checkpoint["conv_in.bias"]
new_checkpoint["conv_out.weight"] = checkpoint["conv_out.weight"]
new_checkpoint["conv_out.bias"] = checkpoint["conv_out.bias"]
num_down_blocks = len({".".join(layer.split(".")[:2]) for layer in checkpoint if "down" in layer})
down_blocks = {
layer_id: [key for key in checkpoint if f"down.{layer_id}" in key] for layer_id in range(num_down_blocks)
}
num_up_blocks = len({".".join(layer.split(".")[:2]) for layer in checkpoint if "up" in layer})
up_blocks = {layer_id: [key for key in checkpoint if f"up.{layer_id}" in key] for layer_id in range(num_up_blocks)}
for i in range(num_down_blocks):
block_id = (i - 1) // (config["layers_per_block"] + 1)
if any("downsample" in layer for layer in down_blocks[i]):
new_checkpoint[f"down_blocks.{i}.downsamplers.0.conv.weight"] = checkpoint[
f"down.{i}.downsample.op.weight"
]
new_checkpoint[f"down_blocks.{i}.downsamplers.0.conv.bias"] = checkpoint[f"down.{i}.downsample.op.bias"]
# new_checkpoint[f'down_blocks.{i}.downsamplers.0.op.weight'] = checkpoint[f'down.{i}.downsample.conv.weight']
# new_checkpoint[f'down_blocks.{i}.downsamplers.0.op.bias'] = checkpoint[f'down.{i}.downsample.conv.bias']
if any("block" in layer for layer in down_blocks[i]):
num_blocks = len(
{".".join(shave_segments(layer, 2).split(".")[:2]) for layer in down_blocks[i] if "block" in layer}
)
blocks = {
layer_id: [key for key in down_blocks[i] if f"block.{layer_id}" in key]
for layer_id in range(num_blocks)
}
if num_blocks > 0:
for j in range(config["layers_per_block"]):
paths = renew_resnet_paths(blocks[j])
assign_to_checkpoint(paths, new_checkpoint, checkpoint)
if any("attn" in layer for layer in down_blocks[i]):
num_attn = len(
{".".join(shave_segments(layer, 2).split(".")[:2]) for layer in down_blocks[i] if "attn" in layer}
)
attns = {
layer_id: [key for key in down_blocks[i] if f"attn.{layer_id}" in key]
for layer_id in range(num_blocks)
}
if num_attn > 0:
for j in range(config["layers_per_block"]):
paths = renew_attention_paths(attns[j])
assign_to_checkpoint(paths, new_checkpoint, checkpoint, config=config)
mid_block_1_layers = [key for key in checkpoint if "mid.block_1" in key]
mid_block_2_layers = [key for key in checkpoint if "mid.block_2" in key]
mid_attn_1_layers = [key for key in checkpoint if "mid.attn_1" in key]
# Mid new 2
paths = renew_resnet_paths(mid_block_1_layers)
assign_to_checkpoint(
paths,
new_checkpoint,
checkpoint,
additional_replacements=[{"old": "mid.", "new": "mid_new_2."}, {"old": "block_1", "new": "resnets.0"}],
)
paths = renew_resnet_paths(mid_block_2_layers)
assign_to_checkpoint(
paths,
new_checkpoint,
checkpoint,
additional_replacements=[{"old": "mid.", "new": "mid_new_2."}, {"old": "block_2", "new": "resnets.1"}],
)
paths = renew_attention_paths(mid_attn_1_layers, in_mid=True)
assign_to_checkpoint(
paths,
new_checkpoint,
checkpoint,
additional_replacements=[{"old": "mid.", "new": "mid_new_2."}, {"old": "attn_1", "new": "attentions.0"}],
)
for i in range(num_up_blocks):
block_id = num_up_blocks - 1 - i
if any("upsample" in layer for layer in up_blocks[i]):
new_checkpoint[f"up_blocks.{block_id}.upsamplers.0.conv.weight"] = checkpoint[
f"up.{i}.upsample.conv.weight"
]
new_checkpoint[f"up_blocks.{block_id}.upsamplers.0.conv.bias"] = checkpoint[f"up.{i}.upsample.conv.bias"]
if any("block" in layer for layer in up_blocks[i]):
num_blocks = len(
{".".join(shave_segments(layer, 2).split(".")[:2]) for layer in up_blocks[i] if "block" in layer}
)
blocks = {
layer_id: [key for key in up_blocks[i] if f"block.{layer_id}" in key] for layer_id in range(num_blocks)
}
if num_blocks > 0:
for j in range(config["layers_per_block"] + 1):
replace_indices = {"old": f"up_blocks.{i}", "new": f"up_blocks.{block_id}"}
paths = renew_resnet_paths(blocks[j])
assign_to_checkpoint(paths, new_checkpoint, checkpoint, additional_replacements=[replace_indices])
if any("attn" in layer for layer in up_blocks[i]):
num_attn = len(
{".".join(shave_segments(layer, 2).split(".")[:2]) for layer in up_blocks[i] if "attn" in layer}
)
attns = {
layer_id: [key for key in up_blocks[i] if f"attn.{layer_id}" in key] for layer_id in range(num_blocks)
}
if num_attn > 0:
for j in range(config["layers_per_block"] + 1):
replace_indices = {"old": f"up_blocks.{i}", "new": f"up_blocks.{block_id}"}
paths = renew_attention_paths(attns[j])
assign_to_checkpoint(paths, new_checkpoint, checkpoint, additional_replacements=[replace_indices])
new_checkpoint = {k.replace("mid_new_2", "mid_block"): v for k, v in new_checkpoint.items()}
return new_checkpoint
def convert_vq_autoenc_checkpoint(checkpoint, config):
"""
Takes a state dict and a config, and returns a converted checkpoint.
"""
new_checkpoint = {}
new_checkpoint["encoder.conv_norm_out.weight"] = checkpoint["encoder.norm_out.weight"]
new_checkpoint["encoder.conv_norm_out.bias"] = checkpoint["encoder.norm_out.bias"]
new_checkpoint["encoder.conv_in.weight"] = checkpoint["encoder.conv_in.weight"]
new_checkpoint["encoder.conv_in.bias"] = checkpoint["encoder.conv_in.bias"]
new_checkpoint["encoder.conv_out.weight"] = checkpoint["encoder.conv_out.weight"]
new_checkpoint["encoder.conv_out.bias"] = checkpoint["encoder.conv_out.bias"]
new_checkpoint["decoder.conv_norm_out.weight"] = checkpoint["decoder.norm_out.weight"]
new_checkpoint["decoder.conv_norm_out.bias"] = checkpoint["decoder.norm_out.bias"]
new_checkpoint["decoder.conv_in.weight"] = checkpoint["decoder.conv_in.weight"]
new_checkpoint["decoder.conv_in.bias"] = checkpoint["decoder.conv_in.bias"]
new_checkpoint["decoder.conv_out.weight"] = checkpoint["decoder.conv_out.weight"]
new_checkpoint["decoder.conv_out.bias"] = checkpoint["decoder.conv_out.bias"]
num_down_blocks = len({".".join(layer.split(".")[:3]) for layer in checkpoint if "down" in layer})
down_blocks = {
layer_id: [key for key in checkpoint if f"down.{layer_id}" in key] for layer_id in range(num_down_blocks)
}
num_up_blocks = len({".".join(layer.split(".")[:3]) for layer in checkpoint if "up" in layer})
up_blocks = {layer_id: [key for key in checkpoint if f"up.{layer_id}" in key] for layer_id in range(num_up_blocks)}
for i in range(num_down_blocks):
block_id = (i - 1) // (config["layers_per_block"] + 1)
if any("downsample" in layer for layer in down_blocks[i]):
new_checkpoint[f"encoder.down_blocks.{i}.downsamplers.0.conv.weight"] = checkpoint[
f"encoder.down.{i}.downsample.conv.weight"
]
new_checkpoint[f"encoder.down_blocks.{i}.downsamplers.0.conv.bias"] = checkpoint[
f"encoder.down.{i}.downsample.conv.bias"
]
if any("block" in layer for layer in down_blocks[i]):
num_blocks = len(
{".".join(shave_segments(layer, 3).split(".")[:3]) for layer in down_blocks[i] if "block" in layer}
)
blocks = {
layer_id: [key for key in down_blocks[i] if f"block.{layer_id}" in key]
for layer_id in range(num_blocks)
}
if num_blocks > 0:
for j in range(config["layers_per_block"]):
paths = renew_resnet_paths(blocks[j])
assign_to_checkpoint(paths, new_checkpoint, checkpoint)
if any("attn" in layer for layer in down_blocks[i]):
num_attn = len(
{".".join(shave_segments(layer, 3).split(".")[:3]) for layer in down_blocks[i] if "attn" in layer}
)
attns = {
layer_id: [key for key in down_blocks[i] if f"attn.{layer_id}" in key]
for layer_id in range(num_blocks)
}
if num_attn > 0:
for j in range(config["layers_per_block"]):
paths = renew_attention_paths(attns[j])
assign_to_checkpoint(paths, new_checkpoint, checkpoint, config=config)
mid_block_1_layers = [key for key in checkpoint if "mid.block_1" in key]
mid_block_2_layers = [key for key in checkpoint if "mid.block_2" in key]
mid_attn_1_layers = [key for key in checkpoint if "mid.attn_1" in key]
# Mid new 2
paths = renew_resnet_paths(mid_block_1_layers)
assign_to_checkpoint(
paths,
new_checkpoint,
checkpoint,
additional_replacements=[{"old": "mid.", "new": "mid_new_2."}, {"old": "block_1", "new": "resnets.0"}],
)
paths = renew_resnet_paths(mid_block_2_layers)
assign_to_checkpoint(
paths,
new_checkpoint,
checkpoint,
additional_replacements=[{"old": "mid.", "new": "mid_new_2."}, {"old": "block_2", "new": "resnets.1"}],
)
paths = renew_attention_paths(mid_attn_1_layers, in_mid=True)
assign_to_checkpoint(
paths,
new_checkpoint,
checkpoint,
additional_replacements=[{"old": "mid.", "new": "mid_new_2."}, {"old": "attn_1", "new": "attentions.0"}],
)
for i in range(num_up_blocks):
block_id = num_up_blocks - 1 - i
if any("upsample" in layer for layer in up_blocks[i]):
new_checkpoint[f"decoder.up_blocks.{block_id}.upsamplers.0.conv.weight"] = checkpoint[
f"decoder.up.{i}.upsample.conv.weight"
]
new_checkpoint[f"decoder.up_blocks.{block_id}.upsamplers.0.conv.bias"] = checkpoint[
f"decoder.up.{i}.upsample.conv.bias"
]
if any("block" in layer for layer in up_blocks[i]):
num_blocks = len(
{".".join(shave_segments(layer, 3).split(".")[:3]) for layer in up_blocks[i] if "block" in layer}
)
blocks = {
layer_id: [key for key in up_blocks[i] if f"block.{layer_id}" in key] for layer_id in range(num_blocks)
}
if num_blocks > 0:
for j in range(config["layers_per_block"] + 1):
replace_indices = {"old": f"up_blocks.{i}", "new": f"up_blocks.{block_id}"}
paths = renew_resnet_paths(blocks[j])
assign_to_checkpoint(paths, new_checkpoint, checkpoint, additional_replacements=[replace_indices])
if any("attn" in layer for layer in up_blocks[i]):
num_attn = len(
{".".join(shave_segments(layer, 3).split(".")[:3]) for layer in up_blocks[i] if "attn" in layer}
)
attns = {
layer_id: [key for key in up_blocks[i] if f"attn.{layer_id}" in key] for layer_id in range(num_blocks)
}
if num_attn > 0:
for j in range(config["layers_per_block"] + 1):
replace_indices = {"old": f"up_blocks.{i}", "new": f"up_blocks.{block_id}"}
paths = renew_attention_paths(attns[j])
assign_to_checkpoint(paths, new_checkpoint, checkpoint, additional_replacements=[replace_indices])
new_checkpoint = {k.replace("mid_new_2", "mid_block"): v for k, v in new_checkpoint.items()}
new_checkpoint["quant_conv.weight"] = checkpoint["quant_conv.weight"]
new_checkpoint["quant_conv.bias"] = checkpoint["quant_conv.bias"]
if "quantize.embedding.weight" in checkpoint:
new_checkpoint["quantize.embedding.weight"] = checkpoint["quantize.embedding.weight"]
new_checkpoint["post_quant_conv.weight"] = checkpoint["post_quant_conv.weight"]
new_checkpoint["post_quant_conv.bias"] = checkpoint["post_quant_conv.bias"]
return new_checkpoint
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument(
"--checkpoint_path", default=None, type=str, required=True, help="Path to the checkpoint to convert."
)
parser.add_argument(
"--config_file",
default=None,
type=str,
required=True,
help="The config json file corresponding to the architecture.",
)
parser.add_argument("--dump_path", default=None, type=str, required=True, help="Path to the output model.")
args = parser.parse_args()
checkpoint = torch.load(args.checkpoint_path)
with open(args.config_file) as f:
config = json.loads(f.read())
# unet case
key_prefix_set = {key.split(".")[0] for key in checkpoint.keys()}
if "encoder" in key_prefix_set and "decoder" in key_prefix_set:
converted_checkpoint = convert_vq_autoenc_checkpoint(checkpoint, config)
else:
converted_checkpoint = convert_ddpm_checkpoint(checkpoint, config)
if "ddpm" in config:
del config["ddpm"]
if config["_class_name"] == "VQModel":
model = VQModel(**config)
model.load_state_dict(converted_checkpoint)
model.save_pretrained(args.dump_path)
elif config["_class_name"] == "AutoencoderKL":
model = AutoencoderKL(**config)
model.load_state_dict(converted_checkpoint)
model.save_pretrained(args.dump_path)
else:
model = UNet2DModel(**config)
model.load_state_dict(converted_checkpoint)
scheduler = DDPMScheduler.from_config("/".join(args.checkpoint_path.split("/")[:-1]))
pipe = DDPMPipeline(unet=model, scheduler=scheduler)
pipe.save_pretrained(args.dump_path)
| 0 |
hf_public_repos/diffusers | hf_public_repos/diffusers/scripts/convert_diffusers_to_original_stable_diffusion.py | # Script for converting a HF Diffusers saved pipeline to a Stable Diffusion checkpoint.
# *Only* converts the UNet, VAE, and Text Encoder.
# Does not convert optimizer state or any other thing.
import argparse
import os.path as osp
import re
import torch
from safetensors.torch import load_file, save_file
# =================#
# UNet Conversion #
# =================#
unet_conversion_map = [
# (stable-diffusion, HF Diffusers)
("time_embed.0.weight", "time_embedding.linear_1.weight"),
("time_embed.0.bias", "time_embedding.linear_1.bias"),
("time_embed.2.weight", "time_embedding.linear_2.weight"),
("time_embed.2.bias", "time_embedding.linear_2.bias"),
("input_blocks.0.0.weight", "conv_in.weight"),
("input_blocks.0.0.bias", "conv_in.bias"),
("out.0.weight", "conv_norm_out.weight"),
("out.0.bias", "conv_norm_out.bias"),
("out.2.weight", "conv_out.weight"),
("out.2.bias", "conv_out.bias"),
]
unet_conversion_map_resnet = [
# (stable-diffusion, HF Diffusers)
("in_layers.0", "norm1"),
("in_layers.2", "conv1"),
("out_layers.0", "norm2"),
("out_layers.3", "conv2"),
("emb_layers.1", "time_emb_proj"),
("skip_connection", "conv_shortcut"),
]
unet_conversion_map_layer = []
# hardcoded number of downblocks and resnets/attentions...
# would need smarter logic for other networks.
for i in range(4):
# loop over downblocks/upblocks
for j in range(2):
# loop over resnets/attentions for downblocks
hf_down_res_prefix = f"down_blocks.{i}.resnets.{j}."
sd_down_res_prefix = f"input_blocks.{3*i + j + 1}.0."
unet_conversion_map_layer.append((sd_down_res_prefix, hf_down_res_prefix))
if i < 3:
# no attention layers in down_blocks.3
hf_down_atn_prefix = f"down_blocks.{i}.attentions.{j}."
sd_down_atn_prefix = f"input_blocks.{3*i + j + 1}.1."
unet_conversion_map_layer.append((sd_down_atn_prefix, hf_down_atn_prefix))
for j in range(3):
# loop over resnets/attentions for upblocks
hf_up_res_prefix = f"up_blocks.{i}.resnets.{j}."
sd_up_res_prefix = f"output_blocks.{3*i + j}.0."
unet_conversion_map_layer.append((sd_up_res_prefix, hf_up_res_prefix))
if i > 0:
# no attention layers in up_blocks.0
hf_up_atn_prefix = f"up_blocks.{i}.attentions.{j}."
sd_up_atn_prefix = f"output_blocks.{3*i + j}.1."
unet_conversion_map_layer.append((sd_up_atn_prefix, hf_up_atn_prefix))
if i < 3:
# no downsample in down_blocks.3
hf_downsample_prefix = f"down_blocks.{i}.downsamplers.0.conv."
sd_downsample_prefix = f"input_blocks.{3*(i+1)}.0.op."
unet_conversion_map_layer.append((sd_downsample_prefix, hf_downsample_prefix))
# no upsample in up_blocks.3
hf_upsample_prefix = f"up_blocks.{i}.upsamplers.0."
sd_upsample_prefix = f"output_blocks.{3*i + 2}.{1 if i == 0 else 2}."
unet_conversion_map_layer.append((sd_upsample_prefix, hf_upsample_prefix))
hf_mid_atn_prefix = "mid_block.attentions.0."
sd_mid_atn_prefix = "middle_block.1."
unet_conversion_map_layer.append((sd_mid_atn_prefix, hf_mid_atn_prefix))
for j in range(2):
hf_mid_res_prefix = f"mid_block.resnets.{j}."
sd_mid_res_prefix = f"middle_block.{2*j}."
unet_conversion_map_layer.append((sd_mid_res_prefix, hf_mid_res_prefix))
def convert_unet_state_dict(unet_state_dict):
# buyer beware: this is a *brittle* function,
# and correct output requires that all of these pieces interact in
# the exact order in which I have arranged them.
mapping = {k: k for k in unet_state_dict.keys()}
for sd_name, hf_name in unet_conversion_map:
mapping[hf_name] = sd_name
for k, v in mapping.items():
if "resnets" in k:
for sd_part, hf_part in unet_conversion_map_resnet:
v = v.replace(hf_part, sd_part)
mapping[k] = v
for k, v in mapping.items():
for sd_part, hf_part in unet_conversion_map_layer:
v = v.replace(hf_part, sd_part)
mapping[k] = v
new_state_dict = {v: unet_state_dict[k] for k, v in mapping.items()}
return new_state_dict
# ================#
# VAE Conversion #
# ================#
vae_conversion_map = [
# (stable-diffusion, HF Diffusers)
("nin_shortcut", "conv_shortcut"),
("norm_out", "conv_norm_out"),
("mid.attn_1.", "mid_block.attentions.0."),
]
for i in range(4):
# down_blocks have two resnets
for j in range(2):
hf_down_prefix = f"encoder.down_blocks.{i}.resnets.{j}."
sd_down_prefix = f"encoder.down.{i}.block.{j}."
vae_conversion_map.append((sd_down_prefix, hf_down_prefix))
if i < 3:
hf_downsample_prefix = f"down_blocks.{i}.downsamplers.0."
sd_downsample_prefix = f"down.{i}.downsample."
vae_conversion_map.append((sd_downsample_prefix, hf_downsample_prefix))
hf_upsample_prefix = f"up_blocks.{i}.upsamplers.0."
sd_upsample_prefix = f"up.{3-i}.upsample."
vae_conversion_map.append((sd_upsample_prefix, hf_upsample_prefix))
# up_blocks have three resnets
# also, up blocks in hf are numbered in reverse from sd
for j in range(3):
hf_up_prefix = f"decoder.up_blocks.{i}.resnets.{j}."
sd_up_prefix = f"decoder.up.{3-i}.block.{j}."
vae_conversion_map.append((sd_up_prefix, hf_up_prefix))
# this part accounts for mid blocks in both the encoder and the decoder
for i in range(2):
hf_mid_res_prefix = f"mid_block.resnets.{i}."
sd_mid_res_prefix = f"mid.block_{i+1}."
vae_conversion_map.append((sd_mid_res_prefix, hf_mid_res_prefix))
vae_conversion_map_attn = [
# (stable-diffusion, HF Diffusers)
("norm.", "group_norm."),
("q.", "query."),
("k.", "key."),
("v.", "value."),
("proj_out.", "proj_attn."),
]
def reshape_weight_for_sd(w):
# convert HF linear weights to SD conv2d weights
return w.reshape(*w.shape, 1, 1)
def convert_vae_state_dict(vae_state_dict):
mapping = {k: k for k in vae_state_dict.keys()}
for k, v in mapping.items():
for sd_part, hf_part in vae_conversion_map:
v = v.replace(hf_part, sd_part)
mapping[k] = v
for k, v in mapping.items():
if "attentions" in k:
for sd_part, hf_part in vae_conversion_map_attn:
v = v.replace(hf_part, sd_part)
mapping[k] = v
new_state_dict = {v: vae_state_dict[k] for k, v in mapping.items()}
weights_to_convert = ["q", "k", "v", "proj_out"]
for k, v in new_state_dict.items():
for weight_name in weights_to_convert:
if f"mid.attn_1.{weight_name}.weight" in k:
print(f"Reshaping {k} for SD format")
new_state_dict[k] = reshape_weight_for_sd(v)
return new_state_dict
# =========================#
# Text Encoder Conversion #
# =========================#
textenc_conversion_lst = [
# (stable-diffusion, HF Diffusers)
("resblocks.", "text_model.encoder.layers."),
("ln_1", "layer_norm1"),
("ln_2", "layer_norm2"),
(".c_fc.", ".fc1."),
(".c_proj.", ".fc2."),
(".attn", ".self_attn"),
("ln_final.", "transformer.text_model.final_layer_norm."),
("token_embedding.weight", "transformer.text_model.embeddings.token_embedding.weight"),
("positional_embedding", "transformer.text_model.embeddings.position_embedding.weight"),
]
protected = {re.escape(x[1]): x[0] for x in textenc_conversion_lst}
textenc_pattern = re.compile("|".join(protected.keys()))
# Ordering is from https://github.com/pytorch/pytorch/blob/master/test/cpp/api/modules.cpp
code2idx = {"q": 0, "k": 1, "v": 2}
def convert_text_enc_state_dict_v20(text_enc_dict):
new_state_dict = {}
capture_qkv_weight = {}
capture_qkv_bias = {}
for k, v in text_enc_dict.items():
if (
k.endswith(".self_attn.q_proj.weight")
or k.endswith(".self_attn.k_proj.weight")
or k.endswith(".self_attn.v_proj.weight")
):
k_pre = k[: -len(".q_proj.weight")]
k_code = k[-len("q_proj.weight")]
if k_pre not in capture_qkv_weight:
capture_qkv_weight[k_pre] = [None, None, None]
capture_qkv_weight[k_pre][code2idx[k_code]] = v
continue
if (
k.endswith(".self_attn.q_proj.bias")
or k.endswith(".self_attn.k_proj.bias")
or k.endswith(".self_attn.v_proj.bias")
):
k_pre = k[: -len(".q_proj.bias")]
k_code = k[-len("q_proj.bias")]
if k_pre not in capture_qkv_bias:
capture_qkv_bias[k_pre] = [None, None, None]
capture_qkv_bias[k_pre][code2idx[k_code]] = v
continue
relabelled_key = textenc_pattern.sub(lambda m: protected[re.escape(m.group(0))], k)
new_state_dict[relabelled_key] = v
for k_pre, tensors in capture_qkv_weight.items():
if None in tensors:
raise Exception("CORRUPTED MODEL: one of the q-k-v values for the text encoder was missing")
relabelled_key = textenc_pattern.sub(lambda m: protected[re.escape(m.group(0))], k_pre)
new_state_dict[relabelled_key + ".in_proj_weight"] = torch.cat(tensors)
for k_pre, tensors in capture_qkv_bias.items():
if None in tensors:
raise Exception("CORRUPTED MODEL: one of the q-k-v values for the text encoder was missing")
relabelled_key = textenc_pattern.sub(lambda m: protected[re.escape(m.group(0))], k_pre)
new_state_dict[relabelled_key + ".in_proj_bias"] = torch.cat(tensors)
return new_state_dict
def convert_text_enc_state_dict(text_enc_dict):
return text_enc_dict
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument("--model_path", default=None, type=str, required=True, help="Path to the model to convert.")
parser.add_argument("--checkpoint_path", default=None, type=str, required=True, help="Path to the output model.")
parser.add_argument("--half", action="store_true", help="Save weights in half precision.")
parser.add_argument(
"--use_safetensors", action="store_true", help="Save weights use safetensors, default is ckpt."
)
args = parser.parse_args()
assert args.model_path is not None, "Must provide a model path!"
assert args.checkpoint_path is not None, "Must provide a checkpoint path!"
# Path for safetensors
unet_path = osp.join(args.model_path, "unet", "diffusion_pytorch_model.safetensors")
vae_path = osp.join(args.model_path, "vae", "diffusion_pytorch_model.safetensors")
text_enc_path = osp.join(args.model_path, "text_encoder", "model.safetensors")
# Load models from safetensors if it exists, if it doesn't pytorch
if osp.exists(unet_path):
unet_state_dict = load_file(unet_path, device="cpu")
else:
unet_path = osp.join(args.model_path, "unet", "diffusion_pytorch_model.bin")
unet_state_dict = torch.load(unet_path, map_location="cpu")
if osp.exists(vae_path):
vae_state_dict = load_file(vae_path, device="cpu")
else:
vae_path = osp.join(args.model_path, "vae", "diffusion_pytorch_model.bin")
vae_state_dict = torch.load(vae_path, map_location="cpu")
if osp.exists(text_enc_path):
text_enc_dict = load_file(text_enc_path, device="cpu")
else:
text_enc_path = osp.join(args.model_path, "text_encoder", "pytorch_model.bin")
text_enc_dict = torch.load(text_enc_path, map_location="cpu")
# Convert the UNet model
unet_state_dict = convert_unet_state_dict(unet_state_dict)
unet_state_dict = {"model.diffusion_model." + k: v for k, v in unet_state_dict.items()}
# Convert the VAE model
vae_state_dict = convert_vae_state_dict(vae_state_dict)
vae_state_dict = {"first_stage_model." + k: v for k, v in vae_state_dict.items()}
# Easiest way to identify v2.0 model seems to be that the text encoder (OpenCLIP) is deeper
is_v20_model = "text_model.encoder.layers.22.layer_norm2.bias" in text_enc_dict
if is_v20_model:
# Need to add the tag 'transformer' in advance so we can knock it out from the final layer-norm
text_enc_dict = {"transformer." + k: v for k, v in text_enc_dict.items()}
text_enc_dict = convert_text_enc_state_dict_v20(text_enc_dict)
text_enc_dict = {"cond_stage_model.model." + k: v for k, v in text_enc_dict.items()}
else:
text_enc_dict = convert_text_enc_state_dict(text_enc_dict)
text_enc_dict = {"cond_stage_model.transformer." + k: v for k, v in text_enc_dict.items()}
# Put together new checkpoint
state_dict = {**unet_state_dict, **vae_state_dict, **text_enc_dict}
if args.half:
state_dict = {k: v.half() for k, v in state_dict.items()}
if args.use_safetensors:
save_file(state_dict, args.checkpoint_path)
else:
state_dict = {"state_dict": state_dict}
torch.save(state_dict, args.checkpoint_path)
| 0 |
hf_public_repos/diffusers/docker | hf_public_repos/diffusers/docker/diffusers-onnxruntime-cpu/Dockerfile | FROM ubuntu:20.04
LABEL maintainer="Hugging Face"
LABEL repository="diffusers"
ENV DEBIAN_FRONTEND=noninteractive
RUN apt update && \
apt install -y bash \
build-essential \
git \
git-lfs \
curl \
ca-certificates \
libsndfile1-dev \
python3.8 \
python3-pip \
python3.8-venv && \
rm -rf /var/lib/apt/lists
# make sure to use venv
RUN python3 -m venv /opt/venv
ENV PATH="/opt/venv/bin:$PATH"
# pre-install the heavy dependencies (these can later be overridden by the deps from setup.py)
RUN python3 -m pip install --no-cache-dir --upgrade pip && \
python3 -m pip install --no-cache-dir \
torch \
torchvision \
torchaudio \
onnxruntime \
--extra-index-url https://download.pytorch.org/whl/cpu && \
python3 -m pip install --no-cache-dir \
accelerate \
datasets \
hf-doc-builder \
huggingface-hub \
Jinja2 \
librosa \
numpy \
scipy \
tensorboard \
transformers
CMD ["/bin/bash"] | 0 |
hf_public_repos/diffusers/docker | hf_public_repos/diffusers/docker/diffusers-pytorch-cuda/Dockerfile | FROM nvidia/cuda:11.7.1-cudnn8-runtime-ubuntu20.04
LABEL maintainer="Hugging Face"
LABEL repository="diffusers"
ENV DEBIAN_FRONTEND=noninteractive
RUN apt update && \
apt install -y bash \
build-essential \
git \
git-lfs \
curl \
ca-certificates \
libsndfile1-dev \
libgl1 \
python3.8 \
python3-pip \
python3.8-venv && \
rm -rf /var/lib/apt/lists
# make sure to use venv
RUN python3 -m venv /opt/venv
ENV PATH="/opt/venv/bin:$PATH"
# pre-install the heavy dependencies (these can later be overridden by the deps from setup.py)
RUN python3 -m pip install --no-cache-dir --upgrade pip && \
python3 -m pip install --no-cache-dir \
torch \
torchvision \
torchaudio \
invisible_watermark && \
python3 -m pip install --no-cache-dir \
accelerate \
datasets \
hf-doc-builder \
huggingface-hub \
Jinja2 \
librosa \
numpy \
scipy \
tensorboard \
transformers \
omegaconf \
pytorch-lightning \
xformers
CMD ["/bin/bash"]
| 0 |
hf_public_repos/diffusers/docker | hf_public_repos/diffusers/docker/diffusers-onnxruntime-cuda/Dockerfile | FROM nvidia/cuda:11.6.2-cudnn8-devel-ubuntu20.04
LABEL maintainer="Hugging Face"
LABEL repository="diffusers"
ENV DEBIAN_FRONTEND=noninteractive
RUN apt update && \
apt install -y bash \
build-essential \
git \
git-lfs \
curl \
ca-certificates \
libsndfile1-dev \
python3.8 \
python3-pip \
python3.8-venv && \
rm -rf /var/lib/apt/lists
# make sure to use venv
RUN python3 -m venv /opt/venv
ENV PATH="/opt/venv/bin:$PATH"
# pre-install the heavy dependencies (these can later be overridden by the deps from setup.py)
RUN python3 -m pip install --no-cache-dir --upgrade pip && \
python3 -m pip install --no-cache-dir \
torch \
torchvision \
torchaudio \
"onnxruntime-gpu>=1.13.1" \
--extra-index-url https://download.pytorch.org/whl/cu117 && \
python3 -m pip install --no-cache-dir \
accelerate \
datasets \
hf-doc-builder \
huggingface-hub \
Jinja2 \
librosa \
numpy \
scipy \
tensorboard \
transformers
CMD ["/bin/bash"] | 0 |
hf_public_repos/diffusers/docker | hf_public_repos/diffusers/docker/diffusers-flax-tpu/Dockerfile | FROM ubuntu:20.04
LABEL maintainer="Hugging Face"
LABEL repository="diffusers"
ENV DEBIAN_FRONTEND=noninteractive
RUN apt update && \
apt install -y bash \
build-essential \
git \
git-lfs \
curl \
ca-certificates \
libsndfile1-dev \
python3.8 \
python3-pip \
python3.8-venv && \
rm -rf /var/lib/apt/lists
# make sure to use venv
RUN python3 -m venv /opt/venv
ENV PATH="/opt/venv/bin:$PATH"
# pre-install the heavy dependencies (these can later be overridden by the deps from setup.py)
# follow the instructions here: https://cloud.google.com/tpu/docs/run-in-container#train_a_jax_model_in_a_docker_container
RUN python3 -m pip install --no-cache-dir --upgrade pip && \
python3 -m pip install --no-cache-dir \
"jax[tpu]>=0.2.16,!=0.3.2" \
-f https://storage.googleapis.com/jax-releases/libtpu_releases.html && \
python3 -m pip install --upgrade --no-cache-dir \
clu \
"flax>=0.4.1" \
"jaxlib>=0.1.65" && \
python3 -m pip install --no-cache-dir \
accelerate \
datasets \
hf-doc-builder \
huggingface-hub \
Jinja2 \
librosa \
numpy \
scipy \
tensorboard \
transformers
CMD ["/bin/bash"] | 0 |
hf_public_repos/diffusers/docker | hf_public_repos/diffusers/docker/diffusers-pytorch-cpu/Dockerfile | FROM ubuntu:20.04
LABEL maintainer="Hugging Face"
LABEL repository="diffusers"
ENV DEBIAN_FRONTEND=noninteractive
RUN apt update && \
apt install -y bash \
build-essential \
git \
git-lfs \
curl \
ca-certificates \
libsndfile1-dev \
python3.8 \
python3-pip \
libgl1 \
python3.8-venv && \
rm -rf /var/lib/apt/lists
# make sure to use venv
RUN python3 -m venv /opt/venv
ENV PATH="/opt/venv/bin:$PATH"
# pre-install the heavy dependencies (these can later be overridden by the deps from setup.py)
RUN python3 -m pip install --no-cache-dir --upgrade pip && \
python3 -m pip install --no-cache-dir \
torch \
torchvision \
torchaudio \
invisible_watermark \
--extra-index-url https://download.pytorch.org/whl/cpu && \
python3 -m pip install --no-cache-dir \
accelerate \
datasets \
hf-doc-builder \
huggingface-hub \
Jinja2 \
librosa \
numpy \
scipy \
tensorboard \
transformers
CMD ["/bin/bash"]
| 0 |
hf_public_repos/diffusers/docker | hf_public_repos/diffusers/docker/diffusers-flax-cpu/Dockerfile | FROM ubuntu:20.04
LABEL maintainer="Hugging Face"
LABEL repository="diffusers"
ENV DEBIAN_FRONTEND=noninteractive
RUN apt update && \
apt install -y bash \
build-essential \
git \
git-lfs \
curl \
ca-certificates \
libsndfile1-dev \
python3.8 \
python3-pip \
python3.8-venv && \
rm -rf /var/lib/apt/lists
# make sure to use venv
RUN python3 -m venv /opt/venv
ENV PATH="/opt/venv/bin:$PATH"
# pre-install the heavy dependencies (these can later be overridden by the deps from setup.py)
# follow the instructions here: https://cloud.google.com/tpu/docs/run-in-container#train_a_jax_model_in_a_docker_container
RUN python3 -m pip install --no-cache-dir --upgrade pip && \
python3 -m pip install --upgrade --no-cache-dir \
clu \
"jax[cpu]>=0.2.16,!=0.3.2" \
"flax>=0.4.1" \
"jaxlib>=0.1.65" && \
python3 -m pip install --no-cache-dir \
accelerate \
datasets \
hf-doc-builder \
huggingface-hub \
Jinja2 \
librosa \
numpy \
scipy \
tensorboard \
transformers
CMD ["/bin/bash"] | 0 |
hf_public_repos/diffusers/src | hf_public_repos/diffusers/src/diffusers/training_utils.py | import contextlib
import copy
import random
from typing import Any, Dict, Iterable, Optional, Union
import numpy as np
import torch
from .utils import deprecate, is_transformers_available
if is_transformers_available():
import transformers
def set_seed(seed: int):
"""
Args:
Helper function for reproducible behavior to set the seed in `random`, `numpy`, `torch`.
seed (`int`): The seed to set.
"""
random.seed(seed)
np.random.seed(seed)
torch.manual_seed(seed)
torch.cuda.manual_seed_all(seed)
# ^^ safe to call this function even if cuda is not available
# Adapted from torch-ema https://github.com/fadel/pytorch_ema/blob/master/torch_ema/ema.py#L14
class EMAModel:
"""
Exponential Moving Average of models weights
"""
def __init__(
self,
parameters: Iterable[torch.nn.Parameter],
decay: float = 0.9999,
min_decay: float = 0.0,
update_after_step: int = 0,
use_ema_warmup: bool = False,
inv_gamma: Union[float, int] = 1.0,
power: Union[float, int] = 2 / 3,
model_cls: Optional[Any] = None,
model_config: Dict[str, Any] = None,
**kwargs,
):
"""
Args:
parameters (Iterable[torch.nn.Parameter]): The parameters to track.
decay (float): The decay factor for the exponential moving average.
min_decay (float): The minimum decay factor for the exponential moving average.
update_after_step (int): The number of steps to wait before starting to update the EMA weights.
use_ema_warmup (bool): Whether to use EMA warmup.
inv_gamma (float):
Inverse multiplicative factor of EMA warmup. Default: 1. Only used if `use_ema_warmup` is True.
power (float): Exponential factor of EMA warmup. Default: 2/3. Only used if `use_ema_warmup` is True.
device (Optional[Union[str, torch.device]]): The device to store the EMA weights on. If None, the EMA
weights will be stored on CPU.
@crowsonkb's notes on EMA Warmup:
If gamma=1 and power=1, implements a simple average. gamma=1, power=2/3 are good values for models you plan
to train for a million or more steps (reaches decay factor 0.999 at 31.6K steps, 0.9999 at 1M steps),
gamma=1, power=3/4 for models you plan to train for less (reaches decay factor 0.999 at 10K steps, 0.9999
at 215.4k steps).
"""
if isinstance(parameters, torch.nn.Module):
deprecation_message = (
"Passing a `torch.nn.Module` to `ExponentialMovingAverage` is deprecated. "
"Please pass the parameters of the module instead."
)
deprecate(
"passing a `torch.nn.Module` to `ExponentialMovingAverage`",
"1.0.0",
deprecation_message,
standard_warn=False,
)
parameters = parameters.parameters()
# set use_ema_warmup to True if a torch.nn.Module is passed for backwards compatibility
use_ema_warmup = True
if kwargs.get("max_value", None) is not None:
deprecation_message = "The `max_value` argument is deprecated. Please use `decay` instead."
deprecate("max_value", "1.0.0", deprecation_message, standard_warn=False)
decay = kwargs["max_value"]
if kwargs.get("min_value", None) is not None:
deprecation_message = "The `min_value` argument is deprecated. Please use `min_decay` instead."
deprecate("min_value", "1.0.0", deprecation_message, standard_warn=False)
min_decay = kwargs["min_value"]
parameters = list(parameters)
self.shadow_params = [p.clone().detach() for p in parameters]
if kwargs.get("device", None) is not None:
deprecation_message = "The `device` argument is deprecated. Please use `to` instead."
deprecate("device", "1.0.0", deprecation_message, standard_warn=False)
self.to(device=kwargs["device"])
self.temp_stored_params = None
self.decay = decay
self.min_decay = min_decay
self.update_after_step = update_after_step
self.use_ema_warmup = use_ema_warmup
self.inv_gamma = inv_gamma
self.power = power
self.optimization_step = 0
self.cur_decay_value = None # set in `step()`
self.model_cls = model_cls
self.model_config = model_config
@classmethod
def from_pretrained(cls, path, model_cls) -> "EMAModel":
_, ema_kwargs = model_cls.load_config(path, return_unused_kwargs=True)
model = model_cls.from_pretrained(path)
ema_model = cls(model.parameters(), model_cls=model_cls, model_config=model.config)
ema_model.load_state_dict(ema_kwargs)
return ema_model
def save_pretrained(self, path):
if self.model_cls is None:
raise ValueError("`save_pretrained` can only be used if `model_cls` was defined at __init__.")
if self.model_config is None:
raise ValueError("`save_pretrained` can only be used if `model_config` was defined at __init__.")
model = self.model_cls.from_config(self.model_config)
state_dict = self.state_dict()
state_dict.pop("shadow_params", None)
model.register_to_config(**state_dict)
self.copy_to(model.parameters())
model.save_pretrained(path)
def get_decay(self, optimization_step: int) -> float:
"""
Compute the decay factor for the exponential moving average.
"""
step = max(0, optimization_step - self.update_after_step - 1)
if step <= 0:
return 0.0
if self.use_ema_warmup:
cur_decay_value = 1 - (1 + step / self.inv_gamma) ** -self.power
else:
cur_decay_value = (1 + step) / (10 + step)
cur_decay_value = min(cur_decay_value, self.decay)
# make sure decay is not smaller than min_decay
cur_decay_value = max(cur_decay_value, self.min_decay)
return cur_decay_value
@torch.no_grad()
def step(self, parameters: Iterable[torch.nn.Parameter]):
if isinstance(parameters, torch.nn.Module):
deprecation_message = (
"Passing a `torch.nn.Module` to `ExponentialMovingAverage.step` is deprecated. "
"Please pass the parameters of the module instead."
)
deprecate(
"passing a `torch.nn.Module` to `ExponentialMovingAverage.step`",
"1.0.0",
deprecation_message,
standard_warn=False,
)
parameters = parameters.parameters()
parameters = list(parameters)
self.optimization_step += 1
# Compute the decay factor for the exponential moving average.
decay = self.get_decay(self.optimization_step)
self.cur_decay_value = decay
one_minus_decay = 1 - decay
context_manager = contextlib.nullcontext
if is_transformers_available() and transformers.deepspeed.is_deepspeed_zero3_enabled():
import deepspeed
for s_param, param in zip(self.shadow_params, parameters):
if is_transformers_available() and transformers.deepspeed.is_deepspeed_zero3_enabled():
context_manager = deepspeed.zero.GatheredParameters(param, modifier_rank=None)
with context_manager():
if param.requires_grad:
s_param.sub_(one_minus_decay * (s_param - param))
else:
s_param.copy_(param)
def copy_to(self, parameters: Iterable[torch.nn.Parameter]) -> None:
"""
Copy current averaged parameters into given collection of parameters.
Args:
parameters: Iterable of `torch.nn.Parameter`; the parameters to be
updated with the stored moving averages. If `None`, the parameters with which this
`ExponentialMovingAverage` was initialized will be used.
"""
parameters = list(parameters)
for s_param, param in zip(self.shadow_params, parameters):
param.data.copy_(s_param.to(param.device).data)
def to(self, device=None, dtype=None) -> None:
r"""Move internal buffers of the ExponentialMovingAverage to `device`.
Args:
device: like `device` argument to `torch.Tensor.to`
"""
# .to() on the tensors handles None correctly
self.shadow_params = [
p.to(device=device, dtype=dtype) if p.is_floating_point() else p.to(device=device)
for p in self.shadow_params
]
def state_dict(self) -> dict:
r"""
Returns the state of the ExponentialMovingAverage as a dict. This method is used by accelerate during
checkpointing to save the ema state dict.
"""
# Following PyTorch conventions, references to tensors are returned:
# "returns a reference to the state and not its copy!" -
# https://pytorch.org/tutorials/beginner/saving_loading_models.html#what-is-a-state-dict
return {
"decay": self.decay,
"min_decay": self.min_decay,
"optimization_step": self.optimization_step,
"update_after_step": self.update_after_step,
"use_ema_warmup": self.use_ema_warmup,
"inv_gamma": self.inv_gamma,
"power": self.power,
"shadow_params": self.shadow_params,
}
def store(self, parameters: Iterable[torch.nn.Parameter]) -> None:
r"""
Args:
Save the current parameters for restoring later.
parameters: Iterable of `torch.nn.Parameter`; the parameters to be
temporarily stored.
"""
self.temp_stored_params = [param.detach().cpu().clone() for param in parameters]
def restore(self, parameters: Iterable[torch.nn.Parameter]) -> None:
r"""
Args:
Restore the parameters stored with the `store` method. Useful to validate the model with EMA parameters without:
affecting the original optimization process. Store the parameters before the `copy_to()` method. After
validation (or model saving), use this to restore the former parameters.
parameters: Iterable of `torch.nn.Parameter`; the parameters to be
updated with the stored parameters. If `None`, the parameters with which this
`ExponentialMovingAverage` was initialized will be used.
"""
if self.temp_stored_params is None:
raise RuntimeError("This ExponentialMovingAverage has no `store()`ed weights " "to `restore()`")
for c_param, param in zip(self.temp_stored_params, parameters):
param.data.copy_(c_param.data)
# Better memory-wise.
self.temp_stored_params = None
def load_state_dict(self, state_dict: dict) -> None:
r"""
Args:
Loads the ExponentialMovingAverage state. This method is used by accelerate during checkpointing to save the
ema state dict.
state_dict (dict): EMA state. Should be an object returned
from a call to :meth:`state_dict`.
"""
# deepcopy, to be consistent with module API
state_dict = copy.deepcopy(state_dict)
self.decay = state_dict.get("decay", self.decay)
if self.decay < 0.0 or self.decay > 1.0:
raise ValueError("Decay must be between 0 and 1")
self.min_decay = state_dict.get("min_decay", self.min_decay)
if not isinstance(self.min_decay, float):
raise ValueError("Invalid min_decay")
self.optimization_step = state_dict.get("optimization_step", self.optimization_step)
if not isinstance(self.optimization_step, int):
raise ValueError("Invalid optimization_step")
self.update_after_step = state_dict.get("update_after_step", self.update_after_step)
if not isinstance(self.update_after_step, int):
raise ValueError("Invalid update_after_step")
self.use_ema_warmup = state_dict.get("use_ema_warmup", self.use_ema_warmup)
if not isinstance(self.use_ema_warmup, bool):
raise ValueError("Invalid use_ema_warmup")
self.inv_gamma = state_dict.get("inv_gamma", self.inv_gamma)
if not isinstance(self.inv_gamma, (float, int)):
raise ValueError("Invalid inv_gamma")
self.power = state_dict.get("power", self.power)
if not isinstance(self.power, (float, int)):
raise ValueError("Invalid power")
shadow_params = state_dict.get("shadow_params", None)
if shadow_params is not None:
self.shadow_params = shadow_params
if not isinstance(self.shadow_params, list):
raise ValueError("shadow_params must be a list")
if not all(isinstance(p, torch.Tensor) for p in self.shadow_params):
raise ValueError("shadow_params must all be Tensors")
| 0 |
hf_public_repos/diffusers/src | hf_public_repos/diffusers/src/diffusers/__init__.py | __version__ = "0.20.0.dev0"
from .configuration_utils import ConfigMixin
from .utils import (
OptionalDependencyNotAvailable,
is_flax_available,
is_inflect_available,
is_invisible_watermark_available,
is_k_diffusion_available,
is_k_diffusion_version,
is_librosa_available,
is_note_seq_available,
is_onnx_available,
is_scipy_available,
is_torch_available,
is_torchsde_available,
is_transformers_available,
is_transformers_version,
is_unidecode_available,
logging,
)
try:
if not is_onnx_available():
raise OptionalDependencyNotAvailable()
except OptionalDependencyNotAvailable:
from .utils.dummy_onnx_objects import * # noqa F403
else:
from .pipelines import OnnxRuntimeModel
try:
if not is_torch_available():
raise OptionalDependencyNotAvailable()
except OptionalDependencyNotAvailable:
from .utils.dummy_pt_objects import * # noqa F403
else:
from .models import (
AsymmetricAutoencoderKL,
AutoencoderKL,
ControlNetModel,
ModelMixin,
MultiAdapter,
PriorTransformer,
T2IAdapter,
T5FilmDecoder,
Transformer2DModel,
UNet1DModel,
UNet2DConditionModel,
UNet2DModel,
UNet3DConditionModel,
VQModel,
)
from .optimization import (
get_constant_schedule,
get_constant_schedule_with_warmup,
get_cosine_schedule_with_warmup,
get_cosine_with_hard_restarts_schedule_with_warmup,
get_linear_schedule_with_warmup,
get_polynomial_decay_schedule_with_warmup,
get_scheduler,
)
from .pipelines import (
AudioPipelineOutput,
AutoPipelineForImage2Image,
AutoPipelineForInpainting,
AutoPipelineForText2Image,
ConsistencyModelPipeline,
DanceDiffusionPipeline,
DDIMPipeline,
DDPMPipeline,
DiffusionPipeline,
DiTPipeline,
ImagePipelineOutput,
KarrasVePipeline,
LDMPipeline,
LDMSuperResolutionPipeline,
PNDMPipeline,
RePaintPipeline,
ScoreSdeVePipeline,
)
from .schedulers import (
CMStochasticIterativeScheduler,
DDIMInverseScheduler,
DDIMParallelScheduler,
DDIMScheduler,
DDPMParallelScheduler,
DDPMScheduler,
DEISMultistepScheduler,
DPMSolverMultistepInverseScheduler,
DPMSolverMultistepScheduler,
DPMSolverSinglestepScheduler,
EulerAncestralDiscreteScheduler,
EulerDiscreteScheduler,
HeunDiscreteScheduler,
IPNDMScheduler,
KarrasVeScheduler,
KDPM2AncestralDiscreteScheduler,
KDPM2DiscreteScheduler,
PNDMScheduler,
RePaintScheduler,
SchedulerMixin,
ScoreSdeVeScheduler,
UnCLIPScheduler,
UniPCMultistepScheduler,
VQDiffusionScheduler,
)
from .training_utils import EMAModel
try:
if not (is_torch_available() and is_scipy_available()):
raise OptionalDependencyNotAvailable()
except OptionalDependencyNotAvailable:
from .utils.dummy_torch_and_scipy_objects import * # noqa F403
else:
from .schedulers import LMSDiscreteScheduler
try:
if not (is_torch_available() and is_torchsde_available()):
raise OptionalDependencyNotAvailable()
except OptionalDependencyNotAvailable:
from .utils.dummy_torch_and_torchsde_objects import * # noqa F403
else:
from .schedulers import DPMSolverSDEScheduler
try:
if not (is_torch_available() and is_transformers_available()):
raise OptionalDependencyNotAvailable()
except OptionalDependencyNotAvailable:
from .utils.dummy_torch_and_transformers_objects import * # noqa F403
else:
from .pipelines import (
AltDiffusionImg2ImgPipeline,
AltDiffusionPipeline,
AudioLDMPipeline,
CycleDiffusionPipeline,
IFImg2ImgPipeline,
IFImg2ImgSuperResolutionPipeline,
IFInpaintingPipeline,
IFInpaintingSuperResolutionPipeline,
IFPipeline,
IFSuperResolutionPipeline,
ImageTextPipelineOutput,
KandinskyCombinedPipeline,
KandinskyImg2ImgCombinedPipeline,
KandinskyImg2ImgPipeline,
KandinskyInpaintCombinedPipeline,
KandinskyInpaintPipeline,
KandinskyPipeline,
KandinskyPriorPipeline,
KandinskyV22CombinedPipeline,
KandinskyV22ControlnetImg2ImgPipeline,
KandinskyV22ControlnetPipeline,
KandinskyV22Img2ImgCombinedPipeline,
KandinskyV22Img2ImgPipeline,
KandinskyV22InpaintCombinedPipeline,
KandinskyV22InpaintPipeline,
KandinskyV22Pipeline,
KandinskyV22PriorEmb2EmbPipeline,
KandinskyV22PriorPipeline,
LDMTextToImagePipeline,
PaintByExamplePipeline,
SemanticStableDiffusionPipeline,
ShapEImg2ImgPipeline,
ShapEPipeline,
StableDiffusionAdapterPipeline,
StableDiffusionAttendAndExcitePipeline,
StableDiffusionControlNetImg2ImgPipeline,
StableDiffusionControlNetInpaintPipeline,
StableDiffusionControlNetPipeline,
StableDiffusionDepth2ImgPipeline,
StableDiffusionDiffEditPipeline,
StableDiffusionImageVariationPipeline,
StableDiffusionImg2ImgPipeline,
StableDiffusionInpaintPipeline,
StableDiffusionInpaintPipelineLegacy,
StableDiffusionInstructPix2PixPipeline,
StableDiffusionLatentUpscalePipeline,
StableDiffusionLDM3DPipeline,
StableDiffusionModelEditingPipeline,
StableDiffusionPanoramaPipeline,
StableDiffusionParadigmsPipeline,
StableDiffusionPipeline,
StableDiffusionPipelineSafe,
StableDiffusionPix2PixZeroPipeline,
StableDiffusionSAGPipeline,
StableDiffusionUpscalePipeline,
StableUnCLIPImg2ImgPipeline,
StableUnCLIPPipeline,
TextToVideoSDPipeline,
TextToVideoZeroPipeline,
UnCLIPImageVariationPipeline,
UnCLIPPipeline,
UniDiffuserModel,
UniDiffuserPipeline,
UniDiffuserTextDecoder,
VersatileDiffusionDualGuidedPipeline,
VersatileDiffusionImageVariationPipeline,
VersatileDiffusionPipeline,
VersatileDiffusionTextToImagePipeline,
VideoToVideoSDPipeline,
VQDiffusionPipeline,
)
try:
if not (is_torch_available() and is_transformers_available() and is_invisible_watermark_available()):
raise OptionalDependencyNotAvailable()
except OptionalDependencyNotAvailable:
from .utils.dummy_torch_and_transformers_and_invisible_watermark_objects import * # noqa F403
else:
from .pipelines import (
StableDiffusionXLControlNetPipeline,
StableDiffusionXLImg2ImgPipeline,
StableDiffusionXLInpaintPipeline,
StableDiffusionXLInstructPix2PixPipeline,
StableDiffusionXLPipeline,
)
try:
if not (is_torch_available() and is_transformers_available() and is_k_diffusion_available()):
raise OptionalDependencyNotAvailable()
except OptionalDependencyNotAvailable:
from .utils.dummy_torch_and_transformers_and_k_diffusion_objects import * # noqa F403
else:
from .pipelines import StableDiffusionKDiffusionPipeline
try:
if not (is_torch_available() and is_transformers_available() and is_onnx_available()):
raise OptionalDependencyNotAvailable()
except OptionalDependencyNotAvailable:
from .utils.dummy_torch_and_transformers_and_onnx_objects import * # noqa F403
else:
from .pipelines import (
OnnxStableDiffusionImg2ImgPipeline,
OnnxStableDiffusionInpaintPipeline,
OnnxStableDiffusionInpaintPipelineLegacy,
OnnxStableDiffusionPipeline,
OnnxStableDiffusionUpscalePipeline,
StableDiffusionOnnxPipeline,
)
try:
if not (is_torch_available() and is_librosa_available()):
raise OptionalDependencyNotAvailable()
except OptionalDependencyNotAvailable:
from .utils.dummy_torch_and_librosa_objects import * # noqa F403
else:
from .pipelines import AudioDiffusionPipeline, Mel
try:
if not (is_transformers_available() and is_torch_available() and is_note_seq_available()):
raise OptionalDependencyNotAvailable()
except OptionalDependencyNotAvailable:
from .utils.dummy_transformers_and_torch_and_note_seq_objects import * # noqa F403
else:
from .pipelines import SpectrogramDiffusionPipeline
try:
if not is_flax_available():
raise OptionalDependencyNotAvailable()
except OptionalDependencyNotAvailable:
from .utils.dummy_flax_objects import * # noqa F403
else:
from .models.controlnet_flax import FlaxControlNetModel
from .models.modeling_flax_utils import FlaxModelMixin
from .models.unet_2d_condition_flax import FlaxUNet2DConditionModel
from .models.vae_flax import FlaxAutoencoderKL
from .pipelines import FlaxDiffusionPipeline
from .schedulers import (
FlaxDDIMScheduler,
FlaxDDPMScheduler,
FlaxDPMSolverMultistepScheduler,
FlaxKarrasVeScheduler,
FlaxLMSDiscreteScheduler,
FlaxPNDMScheduler,
FlaxSchedulerMixin,
FlaxScoreSdeVeScheduler,
)
try:
if not (is_flax_available() and is_transformers_available()):
raise OptionalDependencyNotAvailable()
except OptionalDependencyNotAvailable:
from .utils.dummy_flax_and_transformers_objects import * # noqa F403
else:
from .pipelines import (
FlaxStableDiffusionControlNetPipeline,
FlaxStableDiffusionImg2ImgPipeline,
FlaxStableDiffusionInpaintPipeline,
FlaxStableDiffusionPipeline,
)
try:
if not (is_note_seq_available()):
raise OptionalDependencyNotAvailable()
except OptionalDependencyNotAvailable:
from .utils.dummy_note_seq_objects import * # noqa F403
else:
from .pipelines import MidiProcessor
| 0 |
hf_public_repos/diffusers/src | hf_public_repos/diffusers/src/diffusers/dependency_versions_table.py | # THIS FILE HAS BEEN AUTOGENERATED. To update:
# 1. modify the `_deps` dict in setup.py
# 2. run `make deps_table_update``
deps = {
"Pillow": "Pillow",
"accelerate": "accelerate>=0.11.0",
"compel": "compel==0.1.8",
"black": "black~=23.1",
"datasets": "datasets",
"filelock": "filelock",
"flax": "flax>=0.4.1",
"hf-doc-builder": "hf-doc-builder>=0.3.0",
"huggingface-hub": "huggingface-hub>=0.13.2",
"requests-mock": "requests-mock==1.10.0",
"importlib_metadata": "importlib_metadata",
"invisible-watermark": "invisible-watermark>=0.2.0",
"isort": "isort>=5.5.4",
"jax": "jax>=0.2.8,!=0.3.2",
"jaxlib": "jaxlib>=0.1.65",
"Jinja2": "Jinja2",
"k-diffusion": "k-diffusion>=0.0.12",
"torchsde": "torchsde",
"note_seq": "note_seq",
"librosa": "librosa",
"numpy": "numpy",
"omegaconf": "omegaconf",
"parameterized": "parameterized",
"protobuf": "protobuf>=3.20.3,<4",
"pytest": "pytest",
"pytest-timeout": "pytest-timeout",
"pytest-xdist": "pytest-xdist",
"ruff": "ruff>=0.0.241",
"safetensors": "safetensors>=0.3.1",
"sentencepiece": "sentencepiece>=0.1.91,!=0.1.92",
"scipy": "scipy",
"onnx": "onnx",
"regex": "regex!=2019.12.17",
"requests": "requests",
"tensorboard": "tensorboard",
"torch": "torch>=1.4",
"torchvision": "torchvision",
"transformers": "transformers>=4.25.1",
"urllib3": "urllib3<=2.0.0",
}
| 0 |
Subsets and Splits
No community queries yet
The top public SQL queries from the community will appear here once available.