
licenses
listlengths 1
3
| version
stringclasses 677
values | tree_hash
stringlengths 40
40
| path
stringclasses 1
value | type
stringclasses 2
values | size
stringlengths 2
8
| text
stringlengths 25
67.1M
| package_name
stringlengths 2
41
| repo
stringlengths 33
86
|
|---|---|---|---|---|---|---|---|---|
[
"MIT"
]
| 0.2.2 | 88c874db43a7c0f99347ee1013b2052e6cf23ac3 | code | 2487 | "A generic wrapper around `wasm_XXX_vec_t`"
mutable struct WasmVec{T,S} <: AbstractVector{S}
size::Csize_t
data::Ptr{S}
end
wasm_vec_delete(wasm_vec::WasmVec{T,S}) where {T,S} = _get_delete_function(T)(wasm_vec)
function WasmVec{T,S}(vector::Vector{S} = S[]) where {T,S}
vec_size = length(vector)
wasm_vec = WasmVec{T,S}(0, C_NULL)
vec_uninitialized = _get_uninitialized_function(T)
vec_uninitialized(wasm_vec, vec_size)
src_ptr = pointer(vector)
GC.@preserve vector unsafe_copyto!(wasm_vec.data, src_ptr, vec_size)
finalizer(wasm_vec_delete, wasm_vec)
end
_get_delete_function(T) =
getproperty(LibWasmtime, Symbol(string(nameof(T))[1:end-6] * "_vec_delete"))
_get_uninitialized_function(T) =
getproperty(LibWasmtime, Symbol(string(nameof(T))[1:end-6] * "_vec_new_uninitialized"))
WasmVec(base_type::Type) = WasmVec(base_type[])
function WasmVec(vec::Vector{S}) where {S}
vec_type = _get_wasm_vec_name(S)
WasmVec{vec_type,S}(vec)
end
WasmPtrVec(base_type::Type) = WasmPtrVec(Ptr{base_type}[])
function WasmPtrVec(vec::Vector{Ptr{S}}) where {S}
vec_type = _get_wasm_vec_name(S)
WasmVec{vec_type,Ptr{S}}(vec)
end
_get_wasm_vec_name(::Type{Cchar}) = wasm_byte_vec_t
_get_wasm_vec_name(::Type{UInt8}) = wasm_byte_vec_t
function _get_wasm_vec_name(type::Type)
@assert parentmodule(type) == LibWasmtime "$type should be a LibWasm type"
type_name = string(nameof(type)) # "wasm_XXX_t"
vec_type_sym = Symbol(replace(type_name, r"_t$" => "_vec_t")) # :wasm_XXX_vec_t
getproperty(LibWasmtime, vec_type_sym)
end
Base.IndexStyle(::Type{WasmVec}) = IndexLinear()
Base.length(vec::WasmVec) = vec.size
Base.size(vec::WasmVec) = (length(vec),)
function Base.getindex(vec::WasmVec, i::Int)
@assert 1 <= i <= length(vec) BoundsError(vec, i)
unsafe_load(vec.data, i)
end
function Base.setindex!(vec::WasmVec{T,S}, v::S, i::Int) where {T,S}
@assert 1 <= i <= length(vec) BoundsError(vec, i)
elsize = sizeof(S)
ref = Ref(v)
src_ptr = Base.unsafe_convert(Ptr{S}, ref)
dest_ptr = Base.unsafe_convert(Ptr{S}, vec.data + elsize * (i - 1))
GC.@preserve ref unsafe_copyto!(dest_ptr, src_ptr, 1)
v
end
Base.unsafe_convert(::Type{Ptr{T}}, vec::WasmVec{T,S}) where {T,S} =
Base.unsafe_convert(Ptr{T}, pointer_from_objref(vec))
Base.unsafe_convert(::Type{Ptr{S}}, vec::WasmVec{T,S}) where {T,S} = vec.data
const WasmByteVec = WasmVec{wasm_byte_vec_t,UInt8}
const WasmName = WasmByteVec
| Wasmtime | https://github.com/Pangoraw/Wasmtime.jl.git |
|
[
"MIT"
]
| 0.2.2 | 88c874db43a7c0f99347ee1013b2052e6cf23ac3 | code | 5058 | map_to_extern(extern_func::Ptr{wasm_func_t}) = wasm_func_as_extern(extern_func)
map_to_extern(other) = error("Type $(typeof(other)) is not supported")
mutable struct WasmInstance
wasm_instance_ptr::Ptr{wasm_instance_t}
wasm_module::WasmModule
wasm_externs::WasmVec{wasm_extern_vec_t,Ptr{wasm_extern_t}}
WasmInstance(
wasm_instance_ptr::Ptr{wasm_instance_t},
wasm_module::WasmModule,
wasm_externs = WasmVec{wasm_extern_vec_t,Ptr{wasm_extern_t}}(0, C_NULL),
) = finalizer(wasm_instance_delete, new(wasm_instance_ptr, wasm_module, wasm_externs))
end
function WasmInstance(store::WasmStore, wasm_module::WasmModule)
module_imports = imports(wasm_module)
n_expected_imports = length(module_imports.wasm_imports)
@assert n_expected_imports == 0 "No imports provided, expected $n_expected_imports"
empty_imports = WasmPtrVec(wasm_extern_t)
# TODO: pass trap here to get better error messages
# See `wasmtime/wasi.jl` for an example
wasm_instance_ptr = wasm_instance_new(
store.wasm_store_ptr,
wasm_module.wasm_module_ptr,
empty_imports,
C_NULL,
)
@assert wasm_instance_ptr != C_NULL "Failed to create WASM instance"
WasmInstance(wasm_instance_ptr, wasm_module)
end
function WasmInstance(store::WasmStore, wasm_module::WasmModule, host_imports)
externs_vec = WasmPtrVec(map(map_to_extern, host_imports))
WasmInstance(store, wasm_module, externs_vec)
end
function WasmInstance(
store::WasmStore,
wasm_module::WasmModule,
externs_vec::WasmVec{wasm_extern_vec_t,Ptr{wasm_extern_t}},
)
module_imports = imports(wasm_module)
n_expected_imports = length(module_imports.wasm_imports)
n_provided_imports = length(externs_vec)
@assert n_expected_imports == n_provided_imports "$n_provided_imports imports provided, expected $n_expected_imports"
wasm_trap_ptr = Ref(Ptr{wasm_trap_t}())
wasm_instance_ptr = wasm_instance_new(
store.wasm_store_ptr,
wasm_module.wasm_module_ptr,
externs_vec,
wasm_trap_ptr,
)
if wasm_instance_ptr == C_NULL && wasm_trap_ptr[] != C_NULL
trap_msg = WasmByteVec()
wasm_trap_message(wasm_trap_ptr[], trap_msg)
wasm_trap_delete(wasm_trap_ptr[])
error_message = unsafe_string(trap_msg.data, trap_msg.size)
error(error_message)
end
@assert wasm_instance_ptr != C_NULL "Failed to create WASM instance"
WasmInstance(wasm_instance_ptr, wasm_module, externs_vec)
end
Base.show(io::IO, ::WasmInstance) = print(io, "WasmInstance()")
Base.unsafe_convert(::Type{Ptr{wasm_instance_t}}, instance::WasmInstance) =
instance.wasm_instance_ptr
# TODO: One for each exporttype_type?
mutable struct WasmExport <: AbstractWasmExport
# The wasm_exporttype_t refers to the export on the module side
wasm_export_ptr::Ptr{wasm_exporttype_t}
# The wasm_extern_t refers to the export on the instance side
wasm_extern::WasmExtern
wasm_instance::WasmInstance
name::String
function WasmExport(
wasm_export_ptr::Ptr{wasm_exporttype_t},
wasm_extern_ptr::Ptr{wasm_extern_t},
wasm_instance::WasmInstance,
)
owned_wasm_export_ptr = wasm_exporttype_copy(wasm_export_ptr)
@assert owned_wasm_export_ptr != C_NULL "Failed to copy WASM export"
owned_wasm_extern_ptr = wasm_extern_copy(wasm_extern_ptr)
@assert owned_wasm_extern_ptr != C_NULL "Failed to copy WASM extern"
name_vec_ptr = wasm_exporttype_name(owned_wasm_export_ptr)
name_vec = Base.unsafe_load(name_vec_ptr)
name = unsafe_string(name_vec.data, name_vec.size)
wasm_name_delete(name_vec_ptr)
# TODO: Extract type here
finalizer(
new(
owned_wasm_export_ptr,
WasmExtern(owned_wasm_extern_ptr),
wasm_instance,
name,
),
) do wasm_export
wasm_extern_delete(wasm_export.wasm_extern)
wasm_exporttype_delete(wasm_export.wasm_export_ptr)
end
end
end
name(we::WasmExport) = we.name
function (wasm_export::WasmExport)(args...)
wasm_externtype_ptr = wasm_exporttype_type(wasm_export.wasm_export_ptr)
@assert wasm_externtype_ptr != C_NULL "Failed to get export type for export $(wasm_export.name)"
wasm_externkind = wasm_externtype_kind(wasm_externtype_ptr)
@assert wasm_externkind == WASM_EXTERN_FUNC "Called export '$(wasm_export.name)' is not a function"
wasm_export.wasm_extern(args...)
end
function exports(wasm_instance::WasmInstance)
exports = WasmPtrVec(wasm_exporttype_t)
wasm_module_exports(wasm_instance.wasm_module.wasm_module_ptr, exports)
externs = WasmPtrVec(wasm_extern_t)
wasm_instance_exports(wasm_instance.wasm_instance_ptr, externs)
@assert length(exports) == length(externs)
exports_vector = map(a -> WasmExport(a..., wasm_instance), zip(exports, externs))
WasmExports{WasmInstance,WasmExport}(wasm_instance, exports_vector)
end
| Wasmtime | https://github.com/Pangoraw/Wasmtime.jl.git |
|
[
"MIT"
]
| 0.2.2 | 88c874db43a7c0f99347ee1013b2052e6cf23ac3 | code | 4509 | mutable struct WasmModule <: AbstractWasmModule
wasm_module_ptr::Ptr{wasm_module_t}
WasmModule(module_ptr::Ptr{wasm_module_t}) =
finalizer(wasm_module_delete, new(module_ptr))
end
function WasmModule(store::WasmStore, wasm_byte_vec::WasmByteVec)
wasm_module_ptr = wasm_module_new(store, wasm_byte_vec)
wasm_module_ptr == C_NULL && error("Failed to create wasm module")
WasmModule(wasm_module_ptr)
end
Base.unsafe_convert(::Type{Ptr{wasm_module_t}}, wasm_module::WasmModule) =
wasm_module.wasm_module_ptr
mutable struct WasmMemory
wasm_memory_ptr::Ptr{wasm_memory_t}
end
function WasmMemory(store::WasmStore, limits::Pair{UInt32,UInt32})
limits = wasm_limits_t(limits...)
memory_type = GC.@preserve limits wasm_memorytype_new(pointer_from_objref(limits))
@assert memory_type != C_NULL "Failed to create memory type"
wasm_memory_ptr = wasm_memory_new(store, memory_type)
@assert wasm_memory_ptr != C_NULL "Failed to create memory"
WasmMemory(wasm_memory_ptr)
end
map_to_extern(mem::WasmMemory) = wasm_memory_as_extern(mem)
Base.show(io::IO, wasm_memory::WasmMemory) = print(io, "WasmMemory()")
Base.unsafe_convert(::Type{Ptr{wasm_memory_t}}, wasm_memory::WasmMemory) = wasm_memory.wasm_memory_ptr
function WasmFunc(store::WasmStore, func::Function, return_type, input_types)
params_vec =
WasmPtrVec(collect(Ptr{wasm_valtype_t}, map(julia_type_to_valtype, input_types)))
results_vec =
return_type == Nothing ? WasmPtrVec(wasm_valtype_t) :
WasmPtrVec([julia_type_to_valtype(return_type)])
func_type = wasm_functype_new(params_vec, results_vec)
@assert func_type != C_NULL "Failed to create functype"
function jl_side_host(
args::Ptr{wasm_val_vec_t},
results::Ptr{wasm_val_vec_t},
)::Ptr{wasm_trap_t}
# TODO: support passing the arguments
try
res = func()
wasm_res = Ref(convert(wasm_val_t, res))
data_ptr = unsafe_load(results).data
wasm_val_copy(data_ptr, wasm_res)
C_NULL
catch err
err_msg = string(err)
wasmtime_trap_new(err_msg, sizeof(err_msg))
end
end
# Create a pointer to jl_side_host(args, results)
func_ptr = Base.@cfunction(
$jl_side_host,
Ptr{wasm_trap_t},
(Ptr{wasm_val_vec_t}, Ptr{wasm_val_vec_t})
)
host_func = wasm_func_new(store, func_type, func_ptr)
wasm_functype_delete(func_type)
# Keep a reference to func_ptr in the store, so that it not garbage collected
add_extern_func!(store, func_ptr)
host_func
end
struct WasmFuncRef
wasm_func_ptr::Ptr{wasm_func_t}
end
Base.unsafe_convert(::Type{Ptr{wasm_func_t}}, wasm_func::WasmFuncRef) =
wasm_func.wasm_func_ptr
function (wasm_func::WasmFuncRef)(args...)
params_arity = wasm_func_param_arity(wasm_func)
result_arity = wasm_func_result_arity(wasm_func)
provided_params = length(args)
if params_arity != provided_params
error("Wrong number of argument to function, expected $params_arity, got $provided_params",)
end
converted_args = collect(wasm_val_t, map(arg -> convert(wasm_val_t, arg), args))
params_vec = WasmVec(converted_args)
default_val = wasm_val_t(tuple(zeros(UInt8, 16)...))
results_vec = WasmVec([default_val for _ = 1:result_arity])
wasm_func_call(wasm_func, params_vec, results_vec)
collect(results_vec)
end
mutable struct WasmExtern
wasm_extern_ptr::Ptr{wasm_extern_t}
end
Base.unsafe_convert(::Type{Ptr{wasm_extern_t}}, wasm_extern::WasmExtern) =
wasm_extern.wasm_extern_ptr
function Base.show(io::IO, wasm_extern::WasmExtern)
kind = wasm_extern_kind(wasm_extern) |> wasm_externkind_enum
print(io, "WasmExtern($kind)")
end
function (wasm_extern::WasmExtern)(args...)
extern_as_func = wasm_extern_as_func(wasm_extern)
@assert extern_as_func != C_NULL "Can not use extern $wasm_extern as a function"
WasmFuncRef(extern_as_func)(args...)
end
function name_vec_ptr_to_str(name_vec_ptr::Ptr{wasm_name_t})
@assert name_vec_ptr != C_NULL "Failed to convert wasm_name"
name_vec = Base.unsafe_load(name_vec_ptr)
name = unsafe_string(name_vec.data, name_vec.size)
wasm_name_delete(name_vec_ptr)
name
end
function imports(wasm_module::WasmModule)
wasm_imports_vec = WasmPtrVec(wasm_importtype_t)
wasm_module_imports(wasm_module, wasm_imports_vec)
WasmImports(wasm_module, wasm_imports_vec)
end
| Wasmtime | https://github.com/Pangoraw/Wasmtime.jl.git |
|
[
"MIT"
]
| 0.2.2 | 88c874db43a7c0f99347ee1013b2052e6cf23ac3 | code | 575 | mutable struct WasmStore
wasm_store_ptr::Ptr{wasm_store_t}
externs_func::Vector{Base.CFunction}
WasmStore(wasm_store_ptr::Ptr{wasm_store_t}) =
finalizer(wasm_store_delete, new(wasm_store_ptr, []))
end
WasmStore(wasm_engine::AbstractWasmEngine) = WasmStore(wasm_store_new(wasm_engine))
add_extern_func!(wasm_store::WasmStore, cfunc::Base.CFunction) =
push!(wasm_store.externs_func, cfunc)
Base.unsafe_convert(::Type{Ptr{wasm_store_t}}, wasm_store::WasmStore) =
wasm_store.wasm_store_ptr
Base.show(io::IO, ::WasmStore) = print(io, "WasmStore()")
| Wasmtime | https://github.com/Pangoraw/Wasmtime.jl.git |
|
[
"MIT"
]
| 0.2.2 | 88c874db43a7c0f99347ee1013b2052e6cf23ac3 | code | 1883 | """
A wrapper for wasm_table_t specific to wasmtime, since the wasmtime c-api is currently missing
wasm_ref_as_func()
"""
mutable struct WasmTable <: AbstractVector{WasmFuncRef}
store::WasmStore
wasm_table_ptr::Ptr{wasm_table_t}
end
function WasmTable(store::WasmStore, limits::Pair{Int,Int})
wasm_limits = wasm_limits_t(limits...)
table_valtype = wasm_valtype_new(WASM_FUNCREF)
@assert table_valtype != C_NULL "Failed to create table valtype"
table_type = GC.@preserve wasm_limits wasm_tabletype_new(
table_valtype,
pointer_from_objref(wasm_limits),
)
@assert table_type != C_NULL "Failed to create table type"
wasm_table_ptr = wasm_table_new(store, table_type, C_NULL)
@assert wasm_table_ptr != C_NULL "Failed to create table"
# finalizer(wasm_table_delete, WasmTable(store, wasm_table_ptr))
WasmTable(store, wasm_table_ptr)
end
Base.unsafe_convert(::Type{Ptr{wasm_table_t}}, wasm_table::WasmTable) =
wasm_table.wasm_table_ptr
Base.IndexStyle(::Type{WasmTable}) = IndexLinear()
Base.size(table::WasmTable) = (wasm_table_size(table) |> Int,)
function Base.getindex(table::WasmTable, i::Int)
wasm_val_ref = Ref(wasm_val_t(tuple((zero(UInt8) for _ = 1:16)...)))
index = i - 1
wasmtime_context = @ccall libwasmtime.wasmtime_store_context(table.store::Ptr{wasm_store_t})::Ptr{Nothing}
res = @ccall libwasmtime.wasmtime_table_get(
wasmtime_context::Ptr{Nothing},
table::Ptr{wasm_table_t},
index::Cint,
wasm_val_ref::Ptr{wasm_val_t},
)::Bool
@assert res "Failed to access index $i"
@assert wasm_val_ref[].kind == WASM_FUNCREF
WasmFuncRef(wasm_func_ptr[])
end
function Base.setindex!(table::WasmTable, v, i::Int)
wasm_table_set(table, v, i - 1) # TODO: use result
end
map_to_extern(extern_table::WasmTable) = wasm_table_as_extern(extern_table)
| Wasmtime | https://github.com/Pangoraw/Wasmtime.jl.git |
|
[
"MIT"
]
| 0.2.2 | 88c874db43a7c0f99347ee1013b2052e6cf23ac3 | code | 504 | function throw_error_message(wasm_error::Ptr{wasmtime_error_t})
message_buf = WasmByteVec()
wasmtime_error_message(
wasm_error,
message_buf,
)
error_msg = unsafe_string(message_buf.data, message_buf.size)
@ccall libwasmtime.wasmtime_error_delete(wasm_error::Ptr{wasmtime_error_t})::Cvoid
error(error_msg)
end
macro wt_check(call)
quote
wt_err = $(esc(call))
if wt_err != C_NULL
throw_error_message(wt_err)
end
end
end
| Wasmtime | https://github.com/Pangoraw/Wasmtime.jl.git |
|
[
"MIT"
]
| 0.2.2 | 88c874db43a7c0f99347ee1013b2052e6cf23ac3 | code | 10628 | struct WasmtimeInstance
# wasmtime instances are "just" a 64 bits identifier associated to a store, as such
# they don't have an associated destructor of type wasmtime_delete_instance()
# see the definition of wasmtime_instance_t in LibWasmtime for more info.
identifier::wasmtime_instance
store::WasmtimeStore
end
Base.unsafe_convert(::Type{Ptr{wasmtime_instance_t}}, instance::WasmtimeInstance) =
Base.convert(Ptr{wasmtime_instance}, Base.pointer_from_objref(instance.identifier))
function WasmtimeInstance(store::WasmtimeStore, mod::WasmtimeModule)
module_imports = imports(mod)
n_expected_imports = length(module_imports.wasm_imports)
@assert n_expected_imports == 0 "No imports provided, expected $n_expected_imports"
instance = Ref(wasmtime_instance_t(0, 0))
wasm_trap_ptr = Ref(Ptr{wasm_trap_t}())
@wt_check wasmtime_instance_new(
store,
mod,
C_NULL,
0,
instance,
wasm_trap_ptr,
)
if wasm_trap_ptr[] != C_NULL
trap_msg = WasmByteVec()
wasm_trap_message(wasm_trap_ptr[], trap_msg)
wasm_trap_delete(wasm_trap_ptr[])
error_message = unsafe_string(trap_msg.data, trap_msg.size)
error(error_message)
end
WasmtimeInstance(instance[], store)
end
function WasmtimeInstance(linker::WasmtimeLinker, store::WasmtimeStore, mod::WasmtimeModule)
instance = Ref(wasmtime_instance_t(0, 0))
wasm_trap_ptr = Ref(Ptr{wasm_trap_t}())
@wt_check GC.@preserve instance wasmtime_linker_instantiate(
linker,
store,
mod,
instance,
wasm_trap_ptr,
)
if wasm_trap_ptr[] != C_NULL
trap_msg = WasmByteVec()
wasm_trap_message(wasm_trap_ptr[], trap_msg)
wasm_trap_delete(wasm_trap_ptr[])
error_message = unsafe_string(trap_msg.data, trap_msg.size)
error(error_message)
end
WasmtimeInstance(instance[], store)
end
mutable struct WasmtimeInstanceExport <: AbstractWasmExport
wasm_export_ptr::Ptr{wasm_exporttype_t}
extern::Ref{wasmtime_extern}
wasmtime_instance::WasmtimeInstance
name::String
end
function wasmtime_valkind_to_julia(valkind::wasmtime_valkind_t)::Type
if valkind == WASMTIME_I32
Int32
elseif valkind == WASMTIME_I64
Int64
elseif valkind == WASMTIME_F32
Float32
elseif valkind == WASMTIME_F64
Float64
elseif valkind == WASMTIME_FUNCREF
wasmtime_func_t
elseif valkind == WASMTIME_EXTERNREF
Ptr{wasmtime_externref_t}
elseif valkind == WASMTIME_V128
wasmtime_v128
else
error("Invalid value kind $type")
end
end
struct WasmtimeMemory <: AbstractVector{UInt8}
export_::WasmtimeInstanceExport
end
"Page size of the memory"
function memory_size(mem::WasmtimeMemory)
extern = mem.export_.extern[]
@assert extern.kind == WASM_EXTERN_MEMORY
memory = Ref(extern.of.memory)
store = mem.export_.wasmtime_instance.store
sz = LibWasmtime.wasmtime_memory_size(store, memory)
Int(sz)
end
function memory_max(mem::WasmtimeMemory)
extern = mem.export_.extern[]
@assert extern.kind == WASM_EXTERN_MEMORY
memory = Ref(extern.of.memory)
store = mem.export_.wasmtime_instance.store
mem_type = LibWasmtime.wasmtime_memory_type(store, memory)
max = Ref{UInt64}()
hasmax = LibWasmtime.wasmtime_memorytype_maximum(mem_type, max)
hasmax ? max[] : typemax(UInt64)
end
struct WasmtimeFunc
export_::WasmtimeInstanceExport
end
function Base.size(mem::WasmtimeMemory)
extern = mem.export_.extern[]
@assert extern.kind == WASM_EXTERN_MEMORY
memory = Ref(extern.of.memory)
store = mem.export_.wasmtime_instance.store
sz = LibWasmtime.wasmtime_memory_data_size(store, memory)
(Int(sz),)
end
function Base.getindex(mem::WasmtimeMemory, r::UnitRange{Int})
extern = mem.export_.extern[]
@assert extern.kind == WASM_EXTERN_MEMORY
memory = Ref(extern.of.memory)
store = mem.export_.wasmtime_instance.store
1 <= first(r) <= last(r) <= length(mem) || throw(BoundsError(mem, r))
values = Vector{UInt8}(undef, length(r))
data_ptr = LibWasmtime.wasmtime_memory_data(store, memory) |> Ptr{UInt8}
@GC.preserve values mem unsafe_copyto!(pointer(values),
data_ptr + first(r) - 1, length(r))
values
end
function Base.getindex(mem::WasmtimeMemory, i::Int)
extern = mem.export_.extern[]
@assert extern.kind == WASM_EXTERN_MEMORY
memory = Ref(extern.of.memory)
store = mem.export_.wasmtime_instance.store
1 <= i <= length(mem) || throw(BoundsError(mem, i))
data_ptr = LibWasmtime.wasmtime_memory_data(store, memory) |> Ptr{UInt8}
unsafe_load(data_ptr, i)
end
function Base.setindex!(mem::WasmtimeMemory, v, i)
extern = mem.export_.extern[]
@assert extern.kind == WASM_EXTERN_MEMORY
memory = Ref(extern.of.memory)
store = mem.export_.wasmtime_instance.store
1 <= i <= length(mem) || throw("out of bounds $i")
data_ptr = LibWasmtime.wasmtime_memory_data(store, memory) |> Ptr{UInt8}
unsafe_store!(data_ptr, v, i)
end
function grow!(mem::WasmtimeMemory, delta)
extern = mem.export_.extern[]
@assert extern.kind == WASM_EXTERN_MEMORY
memory = Ref(extern.of.memory)
store = mem.export_.wasmtime_instance.store
if delta + memory_size(mem) > memory_max(mem)
max = memory_max(mem)
sz = memory_size(mem)
error("invalid delta $delta (maximum page size is $max, current $sz)")
end
prev_size = Ref{UInt64}()
@wt_check wasmtime_memory_grow(store, memory, delta, prev_size)
Int(prev_size[])
end
function (func::WasmtimeFunc)(args...)
wasmtime_export = func.export_
extern = wasmtime_export.extern[]
@assert extern.kind == WASM_EXTERN_FUNC "Expected an exported function but got type $(extern.kind)"
func = Ref(extern.of.func)
functype = wasmtime_func_type(wasmtime_export.wasmtime_instance.store, func)
wasm_params = Base.unsafe_convert(Ptr{WasmVec{wasm_valtype_vec_t,Ptr{wasm_valtype_t}}}, wasm_functype_params(functype)) |> Base.unsafe_load
wasm_results = Base.unsafe_convert(Ptr{WasmVec{wasm_valtype_vec_t,Ptr{wasm_valtype_t}}}, wasm_functype_results(functype)) |> Base.unsafe_load
@assert length(args) == length(wasm_params) "Expected $(wasm_params.size) arguments but got $(length(args))"
params_kind = wasm_valtype_kind.(wasm_params)
wasmtime_params = wasmtime_val[]
for (i, (param, kind)) in enumerate(zip(args, params_kind))
jtype = typeof(param)
etype = wasmtime_valkind_to_julia(kind)
@assert jtype == etype "Parameter #$i is of type $jtype, expected $etype"
valunion = Ref{wasmtime_valunion}(wasmtime_valunion(Tuple(zero(UInt8) for _ in 1:16)))
GC.@preserve valunion begin
ptr = Base.unsafe_convert(Ptr{wasmtime_valunion}, valunion)
if jtype == Int32
ptr.i32 = param
elseif jtype == Int64
ptr.i64 = param
elseif jtype == Float32
ptr.f32 = param
elseif jtype == Float64
ptr.f64 = param
elseif kind == WASMTIME_V128
ptr.v128 = param
else
error("cannot use type $etype")
end
end
push!(wasmtime_params, wasmtime_val(kind, valunion[]))
end
wasmtime_results = Vector{wasmtime_val}(undef, length(wasm_results))
trap = Ref(Ptr{wasm_trap_t}(C_NULL))
@wt_check wasmtime_func_call(
wasmtime_export.wasmtime_instance.store,
func,
wasmtime_params,
length(wasmtime_params),
wasmtime_results,
length(wasmtime_results),
trap
)
if trap[] != C_NULL
bytes = WasmByteVec()
wasm_trap_message(trap[], bytes)
msg = unsafe_string(bytes.data, bytes.size)
wasm_trap_delete(trap[])
error(msg)
end
results = map(wasmtime_results) do result
if result.kind == WASMTIME_I32
result.of.i32
elseif result.kind == WASMTIME_I64
result.of.i64
elseif result.kind == WASMTIME_F32
result.of.f32
elseif result.kind == WASMTIME_F64
result.of.f64
elseif result.kind == WASMTIME_V128
result.of.v128
elseif result.kind == WASMTIME_FUNCREF
result.of.funcref
elseif result.kind == WASMTIME_EXTERNREF
result.of.externref
else
error("Unknown value kind $(result.kind)")
end
end
length(results) == 1 ?
first(results) : results
end
function exports(instance::WasmtimeInstance)
instance_type = wasmtime_instance_type(instance.store, instance)
@assert instance_type != C_NULL "Failed to get module type from WasmtimeModule"
wasm_exports = WasmPtrVec(wasm_exporttype_t)
wasmtime_instancetype_exports(instance_type, wasm_exports)
wasmtime_exports = map(enumerate(wasm_exports)) do (i, wasm_export_ptr)
owned_wasm_export_ptr = wasm_exporttype_copy(wasm_export_ptr)
@assert owned_wasm_export_ptr != C_NULL "Failed to copy WASM export"
extern = wasmtime_extern(
UInt8(0),
wasmtime_extern_union(Tuple(UInt8(0xab) for _ = 1:16)),
)
name_vec = Ref(wasm_name(0, Ptr{wasm_byte_t}()))
char_ptr =
Base.unsafe_convert(
Ptr{Nothing},
Base.unsafe_convert(Ptr{wasm_byte_vec_t}, name_vec),
) + Base.sizeof(Csize_t)
len_ptr = Base.unsafe_convert(
Ptr{Csize_t},
Base.unsafe_convert(Ptr{wasm_byte_vec_t}, name_vec),
)
exists = wasmtime_instance_export_nth(
instance.store,
instance,
i - 1,
char_ptr,
len_ptr,
Base.pointer_from_objref(extern),
)
exists || error("Export #$i does not exists")
name = unsafe_string(name_vec[].data, name_vec[].size)
export_ = WasmtimeInstanceExport(wasm_export_ptr, extern, instance, name)
if extern.kind == WASM_EXTERN_FUNC
WasmtimeFunc(export_)
elseif extern.kind == WASM_EXTERN_MEMORY
WasmtimeMemory(export_)
else # generic export, TODO: complete
export_
end
end
WasmExports(instance, wasmtime_exports)
end
name(func::WasmtimeFunc) = func.export_.name
name(mem::WasmtimeMemory) = mem.export_.name
name(export_::WasmtimeInstanceExport) = export_.name
| Wasmtime | https://github.com/Pangoraw/Wasmtime.jl.git |
|
[
"MIT"
]
| 0.2.2 | 88c874db43a7c0f99347ee1013b2052e6cf23ac3 | code | 496 | mutable struct WasmtimeLinker
wasmtime_linker_ptr::Ptr{wasmtime_linker_t}
WasmtimeLinker(ptr::Ptr{wasmtime_linker_t}) = finalizer(wasmtime_linker_delete, new(ptr))
end
WasmtimeLinker(engine) = wasmtime_linker_new(engine) |> WasmtimeLinker
Base.unsafe_convert(::Type{Ptr{wasmtime_linker_t}}, linker::WasmtimeLinker) = linker.wasmtime_linker_ptr
Base.show(io::IO, ::WasmtimeLinker) = write(io, "WasmtimeLinker()")
define_wasi!(linker) = (@wt_check wasmtime_linker_define_wasi(linker));
| Wasmtime | https://github.com/Pangoraw/Wasmtime.jl.git |
|
[
"MIT"
]
| 0.2.2 | 88c874db43a7c0f99347ee1013b2052e6cf23ac3 | code | 2147 | mutable struct WasmtimeModule <: AbstractWasmModule
wasmtime_module_ptr::Ptr{wasmtime_module_t}
WasmtimeModule(ptr::Ptr{wasmtime_module_t}) =
finalizer(wasmtime_module_delete, new(ptr))
end
function WasmtimeModule(engine, code)
mod_ptr = Ref{Ptr{wasmtime_module_t}}(Ptr{wasmtime_module_t}())
@wt_check GC.@preserve mod wasmtime_module_new(
engine,
code,
length(code),
Base.pointer_from_objref(mod_ptr),
)
WasmtimeModule(mod_ptr[])
end
Base.unsafe_convert(::Type{Ptr{wasmtime_module_t}}, mod::WasmtimeModule) =
mod.wasmtime_module_ptr
Base.show(io::IO, ::WasmtimeModule) = write(io, "WasmtimeModule()")
function imports(mod::WasmtimeModule)
module_type = wasmtime_module_type(mod)
mod_imports = WasmPtrVec(wasm_importtype_t)
wasmtime_moduletype_imports(module_type, mod_imports)
WasmImports(mod, mod_imports)
end
mutable struct NotInstanciatedWasmExport <: AbstractWasmExport
wasm_export_ptr::Ptr{wasm_exporttype_t}
wasm_module::WasmtimeModule
name::String
function NotInstanciatedWasmExport(
wasm_export_ptr::Ptr{wasm_exporttype_t},
mod::WasmtimeModule,
)
owned_wasm_export_ptr = wasm_exporttype_copy(wasm_export_ptr)
@assert owned_wasm_export_ptr != C_NULL "Failed to copy WASM export"
name_vec_ptr = wasm_exporttype_name(owned_wasm_export_ptr)
name_vec = Base.unsafe_load(name_vec_ptr)
name = unsafe_string(name_vec.data, name_vec.size)
wasm_name_delete(name_vec_ptr)
finalizer(new(owned_wasm_export_ptr, mod, name)) do wasm_export
wasm_exporttype_delete(wasm_export.wasm_export_ptr)
end
end
end
function exports(mod::WasmtimeModule)
module_type = wasmtime_module_type(mod)
@assert module_type != C_NULL "Failed to get module type from WasmtimeModule"
wasm_exports = WasmPtrVec(wasm_exporttype_t)
wasmtime_moduletype_exports(module_type, wasm_exports)
exports_vector = map(a -> NotInstanciatedWasmExport(a, mod), wasm_exports)
WasmExports{WasmtimeModule,NotInstanciatedWasmExport}(mod, exports_vector)
end
| Wasmtime | https://github.com/Pangoraw/Wasmtime.jl.git |
|
[
"MIT"
]
| 0.2.2 | 88c874db43a7c0f99347ee1013b2052e6cf23ac3 | code | 1511 | mutable struct WasmtimeStore
wasmtime_store_ptr::Ptr{wasmtime_store_t}
wasmtime_context_ptr::Ptr{wasmtime_context_t}
WasmtimeStore(store_ptr::Ptr{wasmtime_store_t},
ctx_ptr::Ptr{wasmtime_context_t}) = finalizer(wasmtime_store_delete, new(store_ptr, ctx_ptr))
end
function WasmtimeStore(engine)
store = wasmtime_store_new(engine, C_NULL, C_NULL)
context = wasmtime_store_context(store)
WasmtimeStore(store, context)
end
Base.unsafe_convert(::Type{Ptr{wasmtime_store_t}}, store::WasmtimeStore) = store.wasmtime_store_ptr
Base.unsafe_convert(::Type{Ptr{wasmtime_context_t}}, store::WasmtimeStore) = store.wasmtime_context_ptr
Base.show(io::IO, ::WasmtimeStore) = write(io, "WasmtimeStore()")
add_fuel!(store, ⛽) = @wt_check wasmtime_context_add_fuel(store, ⛽)
function consume_fuel!(store, 🛻)
remaining = Ref(0)
@wt_check GC.@preserve remaining wasmtime_context_consume_fuel(store, 🛻, Base.pointer_from_objref(remaining))
remaining[]
end
function fuel_consumed(store)
remaining = Ref(0)
fuel_enabled = GC.@preserve remaining wasmtime_context_fuel_consumed(store, Base.pointer_from_objref(remaining))
if !fuel_enabled
error("Fuel consumption is not enabled on the engine for this store")
end
remaining[]
end
function set_wasi!(store, wasi_config)
@assert !wasi_config.owned "This WASI configuration is already used by anotherstore"
@wt_check wasmtime_context_set_wasi(store, wasi_config)
wasi_config.owned = true
nothing
end
| Wasmtime | https://github.com/Pangoraw/Wasmtime.jl.git |
|
[
"MIT"
]
| 0.2.2 | 88c874db43a7c0f99347ee1013b2052e6cf23ac3 | code | 799 | mutable struct wasi_instance_t end
mutable struct WasiConfig
wasi_config_ptr::Ptr{wasi_config_t}
program_name::String
owned::Bool
WasiConfig(wasi_config_ptr, name) =
finalizer(new(wasi_config_ptr, name, false)) do config
config.owned || wasi_config_delete(config)
end
end
WasiConfig(program_name::String) = WasiConfig(wasi_config_new(), program_name)
Base.unsafe_convert(::Type{Ptr{wasi_config_t}}, wasi_config::WasiConfig) =
wasi_config.wasi_config_ptr
function set_argv!(config::WasiConfig, argv)
@assert !config.owned "This WASI configuration is already owned by a store, it can't be modified"
arr_ptr = Base.unsafe_convert.(Cstring, argv)
GC.@preserve arr_ptr argv wasi_config_set_argv(config, length(argv), pointer(arr_ptr))
end
| Wasmtime | https://github.com/Pangoraw/Wasmtime.jl.git |
|
[
"MIT"
]
| 0.2.2 | 88c874db43a7c0f99347ee1013b2052e6cf23ac3 | code | 215 | function wat2wasm(wat::AbstractString)
out = WasmByteVec()
@wt_check wasmtime_wat2wasm(
wat,
length(wat),
out,
)
out
end
macro wat_str(wat::String)
:(wat2wasm($wat))
end
| Wasmtime | https://github.com/Pangoraw/Wasmtime.jl.git |
|
[
"MIT"
]
| 0.2.2 | 88c874db43a7c0f99347ee1013b2052e6cf23ac3 | code | 3136 | @testset "Import/Export" begin
@testset "Import function" begin
wasm_code = wat"""
(module
(func $host_function (import \"\" \"host_function\") (result i32))
(func $function (export \"guest_function\") (result i32) (call $host_function)))
"""
engine = WasmEngine()
store = WasmStore(engine)
wasm_module = WasmModule(store, wasm_code)
@test_throws Any instance = WasmInstance(store, wasm_module)
wasm_imports = imports(wasm_module)
semaphore = Ref(32)
function jl_side()
# side effect on julia side
semaphore[] = 42
# return values
Int32(100)
end
func_type = WasmFunc(store, jl_side, Int32, ())
instance = WasmInstance(store, wasm_module, [func_type])
mod_exports = exports(instance)
guest_function = mod_exports.guest_function
res = guest_function()
@test res[1].kind == Wasmtime.WASM_I32
@test res[1].of.i32 == 100
@test semaphore[] == 42
end
@testset "WASI import" begin
wasm_code = wat"""
(module
;; Import the required fd_write WASI function which will write the given io vectors to stdout
;; The function signature for fd_write is:
;; (File Descriptor, *iovs, iovs_len, nwritten) -> Returns number of bytes written
(import "wasi_unstable" "fd_write" (func $fd_write (param i32 i32 i32 i32) (result i32)))
(memory 1)
(export "memory" (memory 0))
;; Write 'hello world\n' to memory at an offset of 8 bytes
;; Note the trailing newline which is required for the text to appear
(data (i32.const 8) "hello world\n")
(func $main (export "_start")
;; Creating a new io vector within linear memory
(i32.store (i32.const 0) (i32.const 8)) ;; iov.iov_base - This is a pointer to the start of the 'hello world\n' string
(i32.store (i32.const 4) (i32.const 12)) ;; iov.iov_len - The length of the 'hello world\n' string
(call $fd_write
(i32.const 1) ;; file_descriptor - 1 for stdout
(i32.const 0) ;; *iovs - The pointer to the iov array, which is stored at memory location 0
(i32.const 1) ;; iovs_len - We're printing 1 string stored in an iov - so one.
(i32.const 20) ;; nwritten - A place in memory to store the number of bytes written
)
drop ;; Discard the number of bytes written from the top of the stack
)
)
"""
engine = WasmEngine()
store = WasmStore(engine)
wasm_module = WasmModule(store, wasm_code)
imports = Wasmtime.imports(wasm_module)
@test length(imports.wasm_imports) == 1
@test imports.wasm_imports[1].import_module == "wasi_unstable"
@test imports.wasm_imports[1].name == "fd_write"
@test imports.wasm_imports[1].extern_kind == Wasmtime.WASM_EXTERN_FUNC
end
end
| Wasmtime | https://github.com/Pangoraw/Wasmtime.jl.git |
|
[
"MIT"
]
| 0.2.2 | 88c874db43a7c0f99347ee1013b2052e6cf23ac3 | code | 4765 | using Wasmtime
using Test
@testset "Call foreign" begin
engine = WasmEngine()
store = Wasmtime.WasmtimeStore(engine)
code = wat"""
(module
(func $add (param $lhs i32) (param $rhs i32) (result i32)
local.get $lhs
local.get $rhs
i32.add)
(export "add" (func $add))
)
"""
modu = Wasmtime.WasmtimeModule(engine, code)
instance = Wasmtime.WasmtimeInstance(store, modu)
add = exports(instance).add
res = add(Int32(1), Int32(2))
@test res == Int32(3)
end
const PAGE_SIZE = 65536
@testset "Memory" begin
engine = WasmEngine()
store = Wasmtime.WasmtimeStore(engine)
code = wat"""
(module
(memory 42)
(export "memory" (memory 0))
)
"""
modu = Wasmtime.WasmtimeModule(engine, code)
instance = Wasmtime.WasmtimeInstance(store, modu)
mem = exports(instance).memory
@test length(mem) == 42PAGE_SIZE
code = wat"""
(module
(memory 0 1)
(export "memory" (memory 0))
)
"""
modu = Wasmtime.WasmtimeModule(engine, code)
instance = Wasmtime.WasmtimeInstance(store, modu)
mem = exports(instance).memory
@test length(mem) == 0
Wasmtime.grow!(mem, 1)
@test length(mem) == PAGE_SIZE
# Cannot grow past max page size
@test_throws ErrorException Wasmtime.grow!(mem, 1)
code = wat"""
(module
(memory 1)
(func (result i32)
i32.const 0
i32.load
)
(func (result f32)
i32.const 0
f32.load
)
(func (result f64)
i32.const 0
f64.load
)
(export "i32" (func 0))
(export "f32" (func 1))
(export "f64" (func 2))
(export "memory" (memory 0))
)
"""
modu = Wasmtime.WasmtimeModule(engine, code)
instance = Wasmtime.WasmtimeInstance(store, modu)
mem = exports(instance).memory
i32 = exports(instance).i32
f32 = exports(instance).f32
f64 = exports(instance).f64
i32_buf = reinterpret(Int32, mem)
f32_buf = reinterpret(Float32, mem)
f64_buf = reinterpret(Float64, mem)
@test i32() === Int32(0)
i32_buf[1] = 42
@test i32() === Int32(42)
f32_buf[1] = 42f0
@test f32() === 42f0
f64_buf[1] = 42.
@test f64() === 42.
end
@testset "passthrough" begin
code = wat"""
(module
(func (param i32) (result i32)
local.get 0)
(func (param i64) (result i64)
local.get 0)
(func (param f32) (result f32)
local.get 0)
(func (param f64) (result f64)
local.get 0)
(export "i32" (func 0))
(export "i64" (func 1))
(export "f32" (func 2))
(export "f64" (func 3)))
"""
engine = WasmEngine()
store = Wasmtime.WasmtimeStore(engine)
modu = Wasmtime.WasmtimeModule(engine, code)
instance = Wasmtime.WasmtimeInstance(store, modu)
i32 = exports(instance).i32
i64 = exports(instance).i64
f32 = exports(instance).f32
f64 = exports(instance).f64
for (f,T) in zip((i32,i64,f32,f64),
(Int32,Int64,Float32,Float64))
val = T(42)
@test f(val) == val
end
end
@testset "v128" begin
code = wat"""
(module
(func (param v128) (result f32)
local.get 0
f32x4.extract_lane 1)
(func (param v128) (result f32)
local.get 0
f32x4.extract_lane 0
local.get 0
f32x4.extract_lane 1
local.get 0
f32x4.extract_lane 2
local.get 0
f32x4.extract_lane 3
f32.add
f32.add
f32.add)
(export "f32x4_extract_lane" (func 0))
(export "f32x4_sum" (func 1)))
"""
engine = WasmEngine()
store = Wasmtime.WasmtimeStore(engine)
module_ = Wasmtime.WasmtimeModule(engine, code)
instance = Wasmtime.WasmtimeInstance(store, module_)
f = exports(instance).f32x4_extract_lane
fsum = exports(instance).f32x4_sum
v = Wasmtime.f32x4(1f0, Float32(π), 42f0, -32f0)
out = f(v)
@test Float32(π) == out
x₁,x₂,x₃,x₄ = Wasmtime.f32x4(v)
out = fsum(v)
@test ((x₃+x₄)+x₂)+x₁ == out
end
@testset "traps on unreachable" begin
code = wat"""
(module
(func unreachable)
(export "f" (func 0)))
"""
engine = WasmEngine()
store = Wasmtime.WasmtimeStore(engine)
module_ = Wasmtime.WasmtimeModule(engine, code)
instance = Wasmtime.WasmtimeInstance(store, module_)
f = exports(instance).f
@test_throws ErrorException f()
end
# include("./table.jl")
include("./import_export.jl")
include("./wat2wasm.jl")
include("./wasi.jl")
| Wasmtime | https://github.com/Pangoraw/Wasmtime.jl.git |
|
[
"MIT"
]
| 0.2.2 | 88c874db43a7c0f99347ee1013b2052e6cf23ac3 | code | 887 | @testset "WasmTable" begin
wasm_code = wat"""
(module
(import "js" "tbl" (table 2 anyfunc))
(func $f42 (result i32) i32.const 42)
(func $f83 (result i32) i32.const 83)
(elem (i32.const 0) $f42 $f83)
)"""
engine = WasmEngine()
store = WasmStore(engine)
wasm_module = WasmModule(store, wasm_code)
table = Wasmtime.WasmTable(store, 2 => 5)
@test Base.unsafe_convert(Ptr{Wasmtime.wasm_func_t}, table[1]) == C_NULL
@test Base.unsafe_convert(Ptr{Wasmtime.wasm_func_t}, table[2]) == C_NULL
instance = WasmInstance(store, wasm_module, [table])
@test Base.unsafe_convert(Ptr{Wasmtime.wasm_func_t}, table[1]) != C_NULL
@test Base.unsafe_convert(Ptr{Wasmtime.wasm_func_t}, table[2]) != C_NULL
@test Base.convert(Int32, table[1]()[1]) == 42
@test Base.convert(Int32, table[2]()[1]) == 83
end
| Wasmtime | https://github.com/Pangoraw/Wasmtime.jl.git |
|
[
"MIT"
]
| 0.2.2 | 88c874db43a7c0f99347ee1013b2052e6cf23ac3 | code | 1865 | using Downloads
@testset "WASI - Cowsay" begin
mktempdir() do tmp_dir
# TODO: Find a better way to provide the files
location = joinpath(tmp_dir, "cowsay.wasm")
Downloads.download(
"https://registry-cdn.wapm.io/contents/_/cowsay/0.2.0/target/wasm32-wasi/release/cowsay.wasm",
location,
)
wasm_code = open(read, location, "r") |> Wasmtime.WasmVec
engine = WasmEngine()
store = Wasmtime.WasmtimeStore(engine)
wasm_module = Wasmtime.WasmtimeModule(engine, wasm_code)
msg = "Meuuuh!"
stdin_path = joinpath(tmp_dir, "./stdin.txt")
stdout_path = joinpath(tmp_dir, "./stdout.txt")
open(stdin_path, "w") do file
write(file, msg)
end
# TODO: Fix program name and argv's
wasi_config = Wasmtime.WasiConfig("wasi_unstable")
Wasmtime.wasi_config_inherit_stderr(wasi_config)
Wasmtime.wasi_config_set_stdout_file(wasi_config, stdout_path)
Wasmtime.wasi_config_set_stdin_file(wasi_config, stdin_path)
Wasmtime.wasi_config_inherit_env(wasi_config)
Wasmtime.wasi_config_set_argv(wasi_config, 1, ["cowsay"])
Wasmtime.set_wasi!(store, wasi_config)
linker = Wasmtime.WasmtimeLinker(engine)
Wasmtime.define_wasi!(linker)
instance = Wasmtime.WasmtimeInstance(linker, store, wasm_module)
instance_exports = exports(instance)
main_func = instance_exports._start
main_func()
result = read(stdout_path, String)
expected = raw"""
_________
< Meuuuh! >
---------
\ ^__^
\ (oo)\_______
(__)\ )\/\
||----w |
|| ||
"""
@test result == expected
end
end
| Wasmtime | https://github.com/Pangoraw/Wasmtime.jl.git |
|
[
"MIT"
]
| 0.2.2 | 88c874db43a7c0f99347ee1013b2052e6cf23ac3 | code | 888 | @testset "wat2wasm" begin
exception = try
wat"invalid wasm code"
catch e
e
end
exception_msg = string(exception)
@test occursin("invalid wasm code", exception_msg)
end
@testset "Basic export" begin
wasm_code = wat"""
(module
(type $sum_t (func (param i32 i32) (result i32)))
(func $sum_f (type $sum_t) (param $x i32) (param $y i32) (result i32)
local.get $x
local.get $y
i32.add)
(export "sum" (func $sum_f)))
"""
engine = WasmEngine()
store = WasmStore(engine)
wasm_module = WasmModule(store, wasm_code)
instance = WasmInstance(store, wasm_module)
wasm_exports = exports(instance)
sum_function = wasm_exports.sum
result, = sum_function(Int32(2), Int32(2))
result = Base.convert(Int32, result)
@test result == Int32(4)
end
| Wasmtime | https://github.com/Pangoraw/Wasmtime.jl.git |
|
[
"MIT"
]
| 0.2.2 | 88c874db43a7c0f99347ee1013b2052e6cf23ac3 | docs | 1552 | # Wasmtime.jl
A Julia wrapper around the wasmtime runtime to run Web Assembly blobs and libraries from Julia.
## Examples
```julia
julia> using Wasmtime
julia> code = wat"""
(module
(memory 1)
;; adds two consecutive f32 located at
;; address $ptr in memory
(func $sum (param $ptr i32)
(result f32)
local.get $ptr
f32.load
local.get 0
i32.const 4
i32.add
f32.load
f32.add
)
(export "sum" (func $sum))
(export "memory" (memory 0))
)
""";
julia> engine = WasmEngine(); store = Wasmtime.WasmtimeStore(engine);
julia> module_ = Wasmtime.WasmtimeModule(engine, code);
julia> instance = Wasmtime.WasmtimeInstance(store, module_);
julia> (; memory, sum) = exports(instance);
julia> buf = reinterpret(Float32, memory); # memory is an AbstractVector{UInt8}
julia> buf[1] = 32.5f0; buf[2] = 3f0;
julia> sum(Int32(0))
35.5f0
julia> buf[1] + buf[2]
35.5f0
```
## Usage
Wastime exposes two C api. The first one is the common Web Assembly runtime C api with names starting with `Wasm` in Wasmtime.jl.
The second one is a wasmtime specific api which provides more functionality like WASI imports, fine-grained configuration
of the store features like fuel.
See the [`test` folder](https://github.com/Pangoraw/Wasmtime.jl/tree/main/test) for usage examples.
| Wasmtime | https://github.com/Pangoraw/Wasmtime.jl.git |
|
[
"MIT"
]
| 0.1.0 | 59fc4a35e686a96aec6dc24959836b8e8d7666ce | code | 2765 |
"""
SSHAgentSetup
A tool to setup `ssh-agent`.
# Usage
```julia
import SSHAgentSetup
SSHAgentSetup.setup()
SSHAgentSetup.add_key(joinpath(homedir(), ".ssh", "id_rsa"))
```
"""
module SSHAgentSetup
"""
parse_ssh_agent_variables(ssh_agent_output::AbstractString) :: Dict{String, String}
Parses the result from command `ssh-agent -s` as variables `SSH_AUTH_SOCK` and `SSH_AGENT_PID`.
# Example
```julia
str = "SSH_AUTH_SOCK=/tmp/ssh-Spqsh9i4sw6Z/agent.4558; export SSH_AUTH_SOCK;\nSSH_AGENT_PID=4559; export SSH_AGENT_PID;\necho Agent pid 4559;"
result = SSHAgentSetup.parse_ssh_agent_variables(str)
@assert result["SSH_AUTH_SOCK"] == "/tmp/ssh-Spqsh9i4sw6Z/agent.4558"
@assert result["SSH_AGENT_PID"] == "4559"
```
"""
function parse_ssh_agent_variables(ssh_agent_output::AbstractString) :: Dict{String, String}
rgx = r"SSH_AUTH_SOCK=(?<SSH_AUTH_SOCK>[^;]+)[\S\s]*SSH_AGENT_PID=(?<SSH_AGENT_PID>\d+)"
m = match(rgx, ssh_agent_output)
result = Dict{String, String}()
for expected_key in (:SSH_AUTH_SOCK, :SSH_AGENT_PID)
!haskey(m, expected_key) && error("Failed to parse `$expected_key` from `ssh-agent` output")
result[string(expected_key)] = m[expected_key]
end
return result
end
"""
is_agent_up() :: Bool
Checks wether `ssh-agent` is running.
Looks for `SSH_AUTH_SOCK` environment variable.
"""
function is_agent_up() :: Bool
return get(ENV, "SSH_AUTH_SOCK", nothing) !== nothing
end
"""
kill_agent(; quiet::Bool=false)
Runs `ssh-agent -k` to kill the current agent,
and unset env variables `SSH_AUTH_SOCK` and `SSH_AGENT_PID`.
"""
function kill_agent(; quiet::Bool=false)
if is_agent_up()
!quiet && @info("Killing ssh-agent")
run(`ssh-agent -k`)
delete!(ENV, "SSH_AUTH_SOCK")
delete!(ENV, "SSH_AGENT_PID")
end
nothing
end
"""
setup(; kill_agent_atexit::Bool=false, quiet::Bool=false)
Runs `ssh-agent -s` and exports env variables `SSH_AUTH_SOCK` and `SSH_AGENT_PID`
with the result from that command.
"""
function setup(; kill_agent_atexit::Bool=false, quiet::Bool=false)
if is_agent_up()
!quiet && @info("ssh-agent is already present")
else
!quiet && @info("starting ssh-agent")
agent_data = parse_ssh_agent_variables(readchomp(`ssh-agent -s`))
for (k, v) in agent_data
!quiet && @info("Exporting: `$k=$v`")
ENV[k] = v
end
if kill_agent_atexit
atexit(kill_agent)
end
end
nothing
end
"""
add_key(key_file::AbstractString)
Runs `ssh-add \$key_file`.
"""
function add_key(key_file::AbstractString)
@assert isfile(key_file) "Key file `$key_file` not found"
run(`ssh-add $key_file`)
end
end # module SSHAgentSetup
| SSHAgentSetup | https://github.com/felipenoris/SSHAgentSetup.jl.git |
|
[
"MIT"
]
| 0.1.0 | 59fc4a35e686a96aec6dc24959836b8e8d7666ce | code | 551 |
using Test
import SSHAgentSetup
@testset "parse_ssh_agent_variables" begin
str = "SSH_AUTH_SOCK=/tmp/ssh-Spqsh9i4sw6Z/agent.4558; export SSH_AUTH_SOCK;\nSSH_AGENT_PID=4559; export SSH_AGENT_PID;\necho Agent pid 4559;"
result = SSHAgentSetup.parse_ssh_agent_variables(str)
expected_result = Dict{String, String}(
"SSH_AUTH_SOCK" => "/tmp/ssh-Spqsh9i4sw6Z/agent.4558",
"SSH_AGENT_PID" => "4559",
)
for (k, v) in expected_result
@test haskey(result, k)
@test result[k] == v
end
end
| SSHAgentSetup | https://github.com/felipenoris/SSHAgentSetup.jl.git |
|
[
"MIT"
]
| 0.1.0 | 59fc4a35e686a96aec6dc24959836b8e8d7666ce | docs | 245 | # SSHAgentSetup.jl
A tool to setup `ssh-agent`.
# Usage
```julia
import SSHAgentSetup
# starts `ssh-agent`
SSHAgentSetup.setup()
# uses `ssh-add` to add user key to ssh agent
SSHAgentSetup.add_key(joinpath(homedir(), ".ssh", "id_rsa"))
```
| SSHAgentSetup | https://github.com/felipenoris/SSHAgentSetup.jl.git |
|
[
"MIT"
]
| 0.2.1 | 75fdc4972dae0869b855af00ebe86f8f751b2c85 | code | 4745 | ## ODEProblem
"""
ODEProblem(env::AbstractEnv, f, x0, tspan; kwargs...)
An API for DifferentialEquations.ODEProblem(f, x0, tspan; kwargs...).
"""
function DifferentialEquations.ODEProblem(env::AbstractEnv, f, x0, tspan; kwargs...)
warn_is_registered(env)
_x0 = raw(env, x0)
_f(_x, p, t) = raw(env, f(readable(env, _x), p, t))
ODEProblem(_f, _x0, tspan; kwargs...)
end
function DifferentialEquations.ODEProblem(env::AbstractEnv, f, x0, tspan, p; kwargs...)
warn_is_registered(env)
_x0 = raw(env, x0)
_f(_x, p, t) = raw(env, f(readable(env, _x), p, t))
ODEProblem(_f, _x0, tspan, p; kwargs...)
end
## initial condition
# automatic completion of initial condition
"""
initial_condition(env::AbstractEnv)
Automatic completion of readable initial_condition if methods of its sub-environments are given.
"""
function initial_condition(env::AbstractEnv)
env_names = names(env)
values = env_names |> Map(name -> initial_condition(getfield(env, name)))
return (; zip(env_names, values)...) # NamedTuple
end
## register env
"""
@reg_env(env, x0)
Register given environment.
`x0` is an example of readable initial_condition for `env` so that `NestedEnvironments` infers the information of `env`.
# Notes
- Must be used in the global scope.
- `x0` can be any dummy NamedTuple-collection.
"""
macro reg_env(env, x0)
ex = quote
if typeof($(env)) <: AbstractEnv
local env_index_nt, env_size_nt = NestedEnvironments._preprocess($(env), $(x0))
# raw & readable
NestedEnvironments.readable(env::typeof($(env)), _x) = NestedEnvironments._readable(_x, env_index_nt, env_size_nt)
NestedEnvironments.raw(env::typeof($(env)), x) = NestedEnvironments._raw($(env), x)
# register env
push!(NestedEnvironments.__REGISTERED_ENVS, $(env), $(x0))
else
error("Invalid environment")
end
end
esc(ex)
end
# aux
function Base.push!(__REGISTERED_ENVS::RegisteredEnvs, env::AbstractEnv, x0)
num_of_already_reg_envs = __REGISTERED_ENVS.__envs |> Filter(__env -> typeof(__env) == typeof(env)) |> collect |> length
if num_of_already_reg_envs == 0
push!(__REGISTERED_ENVS.__envs, env)
push!(__REGISTERED_ENVS.__xs, x0)
println("$(typeof(env)): registered")
else
println("$(typeof(env)): overwrite existing registered env")
end
end
## macros
# macro for transformation from readable to raw
"""
@raw(env, x)
A macro that transforms a readable (NamedTuple) value to raw (flattened array) value.
"""
macro raw(env, x)
ex = quote
if typeof($(env)) <: AbstractEnv
_x = NestedEnvironments.raw($(env), $(x))
else
error("Invalid environment")
end
end
esc(ex)
end
# auto-completion
"""
@raw(x)
A macro that transforms a readable (NamedTuple) value to raw (flattened array) value by corresponding an appropriate environment from the registered environments.
"""
macro raw(x)
ex = quote
local env_x_cands = zip(NestedEnvironments.__REGISTERED_ENVS.__envs, NestedEnvironments.__REGISTERED_ENVS.__xs) |> Transducers.Filter(env_x -> size(env_x[2]) == size($(x))) |> collect
if length(env_x_cands) == 0
error("There is no matched registered envrionment")
elseif length(env_x_cands) > 1
error("It is ambiguous; too many matched registered environments")
else
@raw(env_x_cands[1][1], $(x))
end
end
esc(ex)
end
# macro for transformation from raw to readable
"""
@readable(env, _x)
A macro that transforms a raw (flattened array) value to readable (NamedTuple) value.
"""
macro readable(env, _x)
ex = quote
if typeof($(env)) <: AbstractEnv
x = NestedEnvironments.readable($(env), $(_x))
else
error("Invalid environment")
end
end
esc(ex)
end
# auto-completion
"""
@readable(x)
A macro that transforms a raw (flattened array) value to readable (NamedTuple) value by corresponding an appropriate environment from the registered environments.
"""
macro readable(_x)
ex = quote
local env_x_cands = zip(NestedEnvironments.__REGISTERED_ENVS.__envs, NestedEnvironments.__REGISTERED_ENVS.__xs) |> Transducers.Filter(env_x -> NestedEnvironments.flatten_length(env_x[2]) == NestedEnvironments.flatten_length($(_x))) |> collect
if length(env_x_cands) == 0
error("There is no matched registered envrionment")
elseif length(env_x_cands) > 1
error("It is ambiguous; too many matched registered environments")
else
@readable(env_x_cands[1][1], $(_x))
end
end
esc(ex)
end
| NestedEnvironments | https://github.com/JinraeKim/NestedEnvironments.jl.git |
|
[
"MIT"
]
| 0.2.1 | 75fdc4972dae0869b855af00ebe86f8f751b2c85 | code | 328 | module NestedEnvironments
using DifferentialEquations
using Transducers
export AbstractEnv # types.jl
# internalAPIs.jl
export raw, readable, @reg_env, @raw, @readable # APIs.jl
export BaseEnv, InputAffineQuadraticCostEnv # zoo.jl
include("types.jl")
include("internalAPIs.jl")
include("APIs.jl")
include("zoo.jl")
end
| NestedEnvironments | https://github.com/JinraeKim/NestedEnvironments.jl.git |
|
[
"MIT"
]
| 0.2.1 | 75fdc4972dae0869b855af00ebe86f8f751b2c85 | code | 2731 | ## warning
function warn_is_registered(env::AbstractEnv)
is_registered = NestedEnvironments.__REGISTERED_ENVS.__envs |> Map(__env -> typeof(__env) == typeof(env)) |> collect |> any
return is_registered ? nothing : error("Unregistered env: $(typeof(env))")
end
## functions
# env names
function Base.names(env::AbstractEnv)
return [name for name in fieldnames(typeof(env)) if typeof(getfield(env, name)) <: AbstractEnv]
end
# extend size for NamedTuple
function Base.size(x0::NamedTuple)
env_names = keys(x0)
if env_names == []
return size(x0)
else
env_sizes = env_names |> Map(name -> size(x0[name]))
return (; zip(env_names, env_sizes)...) # NamedTuple
end
end
function flatten_length(x0::NamedTuple)
env_names = keys(x0)
if env_names == []
return prod(size(x0))
else
return env_names |> Map(name -> flatten_length(x0[name])) |> sum
end
end
flatten_length(x0) = prod(size(x0))
# get the index
function _index(env::AbstractEnv, x0, _range)
env_names = names(env)
if env_names == []
return _range
else
env_accumulated_flatten_lengths = env_names |> Map(name -> flatten_length(x0[name])) |> Scan(+) |> collect
range_first = first(_range)
env_ranges_tmp = (range_first-1) .+ [0, env_accumulated_flatten_lengths...] |> Consecutive(length(env_accumulated_flatten_lengths); step=1)
env_ranges = zip(env_ranges_tmp...) |> MapSplat((x, y) -> x+1:y)
env_indices = zip(env_names, env_ranges) |> MapSplat((name, range) -> _index(getfield(env, name), x0[name], range))
return (; zip(env_names, env_indices)...) # NamedTuple
end
end
# get env_index and env_isze
function _preprocess(env::AbstractEnv, x0)
env_size_nt = size(x0)
env_flatten_length = flatten_length(x0)
env_index_nt = _index(env, x0, 1:env_flatten_length)
return env_index_nt, env_size_nt
end
## main functions
# transform readable to raw (flatten)
function _raw(env::AbstractEnv, x)
env_names = names(env)
if env_names == []
return x
else
_x = env_names |> MapCat(name -> _raw(getfield(env, name), x[name])) |> collect
return _x
end
end
# transform raw (flatten) to readable
function _readable(_x, env_index_nt, env_size_nt)
if typeof(env_index_nt) <: AbstractRange
if env_size_nt == ()
return _x[env_index_nt][1] # scalar
else
return reshape(_x[env_index_nt], env_size_nt...)
end
else
index_names = keys(env_index_nt)
processed_values = index_names |> Map(name -> _readable(_x, env_index_nt[name], env_size_nt[name]))
return (; zip(index_names, processed_values)...)
end
end
| NestedEnvironments | https://github.com/JinraeKim/NestedEnvironments.jl.git |
|
[
"MIT"
]
| 0.2.1 | 75fdc4972dae0869b855af00ebe86f8f751b2c85 | code | 269 | ## basic
# envs
abstract type AbstractEnv end
# registered envs
mutable struct RegisteredEnvs
__envs::Array{AbstractEnv, 1}
__xs::Array{Any, 1}
end
__REGISTERED_ENVS = RegisteredEnvs([], [])
# generic functions
function readable end
function raw end
## zoo
| NestedEnvironments | https://github.com/JinraeKim/NestedEnvironments.jl.git |
|
[
"MIT"
]
| 0.2.1 | 75fdc4972dae0869b855af00ebe86f8f751b2c85 | code | 1724 | using LinearAlgebra
using Parameters
########## Base Env ##########
# BaseEnv
struct BaseEnv <: AbstractEnv
initial_state
end
BaseEnv(given_size::Tuple) = BaseEnv(zeros(given_size))
BaseEnv(args...) = BaseEnv(zeros(args...))
BaseEnv() = BaseEnv(0.0)
# initial_condition
NestedEnvironments.initial_condition(env::BaseEnv) = env.initial_state
########## InputAffineQuadraticCostEnv ##########
"""
An example of continuous-time nonlinear dynamical system introduced in
several studies on approximate dynamic programming.
# Reference
[1] K. G. Vamvoudakis and F. L. Lewis, “Online Actor-Critic Algorithm to Solve the Continuous-Time Infinite Horizon Optimal Control Problem,” Automatica, vol. 46, no. 5, pp. 878–888, 2010, doi: 10.1016/j.automatica.2010.02.018.
[2] V. Nevistic and J. A. Primbs, “Constrained Nonlinear Optimal Control: a Converse HJB Approach,” 1996.
"""
@with_kw struct InputAffineQuadraticCostEnv <: AbstractEnv
Q = Matrix(I, 2, 2)
R = 1
P = [0.5 0; 0 1]
end
function f(env::InputAffineQuadraticCostEnv, x)
x1 = x[1]
x2 = x[2]
f1 = -x1 + x2
f2 = -0.5*x1 -0.5*x2*(1-(cos(2*x1)+2)^2)
return [f1, f2]
end
function g(env::InputAffineQuadraticCostEnv, x)
x1 = x[1]
g1 = 0
g2 = cos(2*x1) +2
return [g1, g2]
end
"""
r(env, x, u)
Calculate running cost, i.e., V = ∫r dt.
"""
function r(env::InputAffineQuadraticCostEnv, x, u)
x'*env.Q*x + u'*env.R*u
end
function V_optimal(env::InputAffineQuadraticCostEnv, x)
return x'*env.P*x
end
function u_optimal(env::InputAffineQuadraticCostEnv, x)
_g = g(env, x)
return -_g'*env.P*x
end
function ẋ(env::InputAffineQuadraticCostEnv, x, t, u)
ẋ = f(env, x) + g(env, x)*u
return ẋ
end
| NestedEnvironments | https://github.com/JinraeKim/NestedEnvironments.jl.git |
|
[
"MIT"
]
| 0.2.1 | 75fdc4972dae0869b855af00ebe86f8f751b2c85 | code | 1955 | using NestedEnvironments
using DifferentialEquations
using Transducers
using Random
using Plots
## envs
struct Policy
end
command(policy::Policy, x::Array{Float64, 1}) = -5*sum(x)
struct Env <: AbstractEnv
iaqc::NestedEnvironments.InputAffineQuadraticCostEnv
policy::Policy
end
function dynamics(env::Env)
return function (x, p, t)
a = p # zero-order-hold action
(; iaqc = NestedEnvironments.ẋ(env.iaqc, x.iaqc, t, a))
end
end
# automatic completion of initial condition
NestedEnvironments.initial_condition(env::NestedEnvironments.InputAffineQuadraticCostEnv) = 2*(rand(2) .- 0.5)
# register envs
__env = Env(NestedEnvironments.InputAffineQuadraticCostEnv(), Policy())
__x0 = NestedEnvironments.initial_condition(__env)
@reg_env __env __x0
## main
function main()
Random.seed!(1)
env = Env(NestedEnvironments.InputAffineQuadraticCostEnv(), Policy())
x0 = NestedEnvironments.initial_condition(env)
t0 = 0.0
tf = 10.0
Δt = 0.01
tspan = (t0, tf)
ts = t0:Δt:tf
prob = ODEProblem(env, dynamics(env), x0, tspan)
function affect!(integrator)
x = @readable env integrator.u # actually not necessary in this case but recommended
integrator.p = command(env.policy, x.iaqc)
end
cb_policy = PresetTimeCallback(ts, affect!)
saved_values = SavedValues(Float64, NamedTuple)
cb_save = SavingCallback((u, t, integrator) -> (; state = @readable(env, integrator.u).iaqc, action = integrator.p), saved_values, saveat=ts)
cb = CallbackSet(cb_policy, cb_save)
@time sol = solve(prob, Tsit5(); p=0.0, callback=cb)
xs = (hcat((saved_values.saveval |> Map(nt -> nt.state) |> collect)...))'
actions = saved_values.saveval |> Map(nt -> nt.action) |> collect
p_x = plot(ts, xs)
log_dir = "data/agent"
mkpath(log_dir)
savefig(p_x, joinpath(log_dir, "x.png"))
p_a = plot(ts, actions)
savefig(p_a, joinpath(log_dir, "a.png"))
end
| NestedEnvironments | https://github.com/JinraeKim/NestedEnvironments.jl.git |
|
[
"MIT"
]
| 0.2.1 | 75fdc4972dae0869b855af00ebe86f8f751b2c85 | code | 1085 | using NestedEnvironments
using DifferentialEquations
using Transducers
using Random
using Plots
using Test
function dynamics(env::NestedEnvironments.InputAffineQuadraticCostEnv)
return function (x, p, t)
u = command(env, x)
NestedEnvironments.ẋ(env, x, t, u)
end
end
command(env, x) = NestedEnvironments.u_optimal(env, x)
NestedEnvironments.initial_condition(env::NestedEnvironments.InputAffineQuadraticCostEnv) = 2*(rand(2) .- 0.5)
# register envs
__env = NestedEnvironments.InputAffineQuadraticCostEnv()
__x0 = NestedEnvironments.initial_condition(__env)
@reg_env __env __x0
function test()
env = NestedEnvironments.InputAffineQuadraticCostEnv()
x0 = NestedEnvironments.initial_condition(env)
@show x0
@show _x0 = @raw(env, x0)
@test _x0 == @raw x0
@test x0 == @readable(env, _x0)
t0 = 0.0
tf = 10.0
Δt = 0.01
tspan = (t0, tf)
ts = t0:Δt:tf
prob = ODEProblem(env, dynamics(env), x0, tspan)
@time sol = solve(prob, Tsit5(), saveat=ts)
xs = sol.u |> Map(u -> @readable u) |> collect
@show xs
end
| NestedEnvironments | https://github.com/JinraeKim/NestedEnvironments.jl.git |
|
[
"MIT"
]
| 0.2.1 | 75fdc4972dae0869b855af00ebe86f8f751b2c85 | code | 154 | using NestedEnvironments
using DifferentialEquations
struct IntegralRLEnv <: AbstractEnv
env::InputAffineQuadraticCostEnv
∫r::IntegralRLEnv
end
| NestedEnvironments | https://github.com/JinraeKim/NestedEnvironments.jl.git |
|
[
"MIT"
]
| 0.2.1 | 75fdc4972dae0869b855af00ebe86f8f751b2c85 | code | 2182 | using NestedEnvironments
using DifferentialEquations
using Transducers
using Test
# `BaseEnv` is a kind of syntax sugar for definition of environment; provided by `src/zoo.jl`.
# Note: `NestedEnvironments.initial_condition(env::BaseEnv) = env.initial_state`
struct Env2 <: AbstractEnv
env21::BaseEnv
env22::BaseEnv
end
struct Env <: AbstractEnv
env1::BaseEnv
env2::Env2
gain::Float64
end
# differential equations are regarded as nested envs (NamedTuple)
function dynamics(env::Env)
return function (x, p, t)
x1 = x.env1
x21 = x.env2.env21
x22 = x.env2.env22
ẋ1 = -x1 - env.gain*sum(x21 + x22)
ẋ21 = -x21
ẋ22 = -x22
(; env1 = ẋ1, env2 = (; env21 = ẋ21, env22 = ẋ22))
end
end
# for convenience
function make_env()
env21, env22 = BaseEnv(reshape(collect(1:8), 2, 4)), BaseEnv(reshape(collect(9:16), 2, 4))
env1 = BaseEnv(-1)
env2 = Env2(env21, env22)
gain = 2.0
env = Env(env1, env2, gain)
env
end
# register env; do it in global scope
__env = make_env()
__x0 = NestedEnvironments.initial_condition(__env)
@reg_env __env __x0
# test
function test()
env = make_env()
# initial condition
# if you extend `NestedEnvironments.initial_condition` for all sub environments, then `NestedEnvironments.initial_condition(env::Env)` will automatically complete a readable initial condition as NamedTuple.
x0 = NestedEnvironments.initial_condition(env) # auto-completion of initial condition
@show x0 # x0 = (env1 = -1, env2 = (env21 = [1 3 5 7; 2 4 6 8], env22 = [9 11 13 15; 10 12 14 16]))
t0 = 0.0
tf = 10.0
tspan = (t0, tf)
Δt = 0.01 # saveat; not numerical integration
ts = t0:Δt:tf
prob = ODEProblem(env, dynamics(env), x0, tspan)
@time sol = solve(prob, Tsit5(), saveat=ts)
# readable
xs = sol.u |> Map(_x -> @readable _x) |> collect # nested states
@test xs[1].env1 == x0.env1
@test xs[1].env2.env21 == x0.env2.env21
@test xs[1].env2.env22 == x0.env2.env22
# raw
_x0 = @raw x0
@show _x0 # _x0 = [-1, 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16]
@test _x0 == sol.u[1]
end
| NestedEnvironments | https://github.com/JinraeKim/NestedEnvironments.jl.git |
|
[
"MIT"
]
| 0.2.1 | 75fdc4972dae0869b855af00ebe86f8f751b2c85 | code | 1872 | using NestedEnvironments
using DifferentialEquations
using Test
## user-defined nested environments
struct SubSubEnv <: AbstractEnv
end
struct SubEnv <: AbstractEnv
env21::SubSubEnv
env22::SubSubEnv
end
struct Env <: AbstractEnv
env1::SubSubEnv
env2::SubEnv
end
# dynamics
function f(x, p, t)
ẋ1 = -x.env1
ẋ21 = -x.env2.env21
ẋ22 = -x.env2.env22
(; env1 = ẋ1, env2 = (; env21 = ẋ21, env22 = ẋ22))
end
# initial condition
function initial_condition(env::Env)
(; env1 = 1, env2 = (; env21 = rand(4), env22 = rand(2, 7)))
end
# for register
__env = Env(SubSubEnv(), SubEnv(SubSubEnv(), SubSubEnv()))
__x0 = initial_condition(__env)
@reg_env __env __x0
## test
function test1()
env = Env(SubSubEnv(), SubEnv(SubSubEnv(), SubSubEnv()))
x0 = initial_condition(env)
@test x0 == @readable @raw x0
end
function test2()
env = Env(SubSubEnv(), SubEnv(SubSubEnv(), SubSubEnv()))
x0 = initial_condition(env)
_x0 = @raw env x0
x0_new = @readable env _x0
@test x0 == x0_new
end
function test3()
env = Env(SubSubEnv(), SubEnv(SubSubEnv(), SubSubEnv()))
x0 = initial_condition(env)
t0 = 0.0
tf = 100.0
tspan = (t0, tf)
ts = t0:0.01:tf
prob = ODEProblem(env, f, x0, tspan)
sol = solve(prob, Tsit5(), saveat=ts)
@test sol.u[1] == @raw env x0
end
function test4()
env1 = BaseEnv()
@test NestedEnvironments.initial_condition(env1) == 0.0
size_tuple = (1, 2)
env2 = BaseEnv(size_tuple)
@test NestedEnvironments.initial_condition(env2) == zeros(size_tuple)
env3 = BaseEnv(size_tuple...)
@test NestedEnvironments.initial_condition(env3) == zeros(size_tuple)
x0 = reshape(collect(1:15), 3, 5)
env4 = BaseEnv(x0)
@test NestedEnvironments.initial_condition(env4) == x0
end
function test()
test1()
test2()
test3()
test4()
end
| NestedEnvironments | https://github.com/JinraeKim/NestedEnvironments.jl.git |
|
[
"MIT"
]
| 0.2.1 | 75fdc4972dae0869b855af00ebe86f8f751b2c85 | code | 1382 | using NestedEnvironments
using DifferentialEquations
using Plots
using Random
using Transducers
function dynamics(env::NestedEnvironments.InputAffineQuadraticCostEnv)
return function (x, p, t)
u = command(env, x)
NestedEnvironments.ẋ(env, x, t, u)
end
end
command(env, x) = NestedEnvironments.u_optimal(env, x)
initial_condition(env::NestedEnvironments.InputAffineQuadraticCostEnv) = 2*(rand(2) .- 0.5)
__env = NestedEnvironments.InputAffineQuadraticCostEnv()
__x0 = initial_condition(__env)
@reg_env __env __x0
## main
function single()
Random.seed!(1)
env = NestedEnvironments.InputAffineQuadraticCostEnv()
x0 = initial_condition(env)
t0 = 0.0
tf = 10.0
Δt = 0.01
tspan = (t0, tf)
ts = t0:Δt:tf
prob = ODEProblem(env, dynamics(env), x0, tspan)
@time sol = solve(prob, Tsit5(), saveat=ts)
plot(sol)
end
function parallel()
Random.seed!(1)
env = NestedEnvironments.InputAffineQuadraticCostEnv()
num = 10
x0s = 1:num |> Map(i -> initial_condition(env))
t0 = 0.0
tf = 10.0
Δt = 0.01
tspan = (t0, tf)
ts = t0:Δt:tf
probs = x0s |> Map(x0 -> ODEProblem(env, dynamics(env), x0, tspan)) |> collect
sols = probs |> Map(prob -> solve(prob, Tsit5(), saveat=ts)) |> tcollect
p = plot()
_ = sols |> Map(sol -> plot!(sol, label=nothing)) |> collect
display(p)
end
| NestedEnvironments | https://github.com/JinraeKim/NestedEnvironments.jl.git |
|
[
"MIT"
]
| 0.2.1 | 75fdc4972dae0869b855af00ebe86f8f751b2c85 | docs | 3848 | # NestedEnvironments.jl
This is an API for nested environments,
compatible with [DifferentialEquations.jl](https://github.com/SciML/DifferentialEquations.jl).
## Terminology
An environment may consist of nested environments.
Each environment is a structure (e.g., `typeof(env) <: AbstractEnv`), which includes dynamical systems and additional information.
## Notes
- Currently, only ODE is supported.
See `src/API.jl` for more details.
# Features
## Nested environments
`NestedEnvironments.jl` supports nested environments API.
The **dynamical equations** and **initial condition** are treated as structured forms (as NamedTuple).
Compared to the original `DifferentialEquations.jl`, you don't need to match the index of derivative calculation.
For example,
```julia
function f(x, p, t)
x1 = x.env1 # for example
x2 = x.env2 # for example
dx1 = x2
dx2 = -x1
(; x1 = dx1, x2 = dx2) # NamedTuple
end
```
instead of
```julia
function f(x, p, t)
dx = zero(x)
dx[1] = x[2]
dx[2] = -x[1]
dx
end
```
.
For more details, see the below example.
## Macros and auto-completion
`NestedEnvironments.jl` provides convenient macros such as `@readable` and `@raw`.
`@readable` makes an Array, compatible with `DifferentialEquations.jl`, (structured) NamedTuple.
Conversely,
`@raw` makes a NamedTuple, default structure of `NestedEnvironments.jl`, an Array compatible with `DifferentialEquations.jl`.
## Environment Zoo
It provides some predefined environments.
See `src/zoo.jl` for more information.
# Usage
## Example
### Nested environments
It is highly recommended to run the following code and practice how to use it.
```julia
using NestedEnvironments
using DifferentialEquations
using Transducers
using Test
# `BaseEnv` is a kind of syntax sugar for definition of environment; provided by `src/zoo.jl`.
# Note: `NestedEnvironments.initial_condition(env::BaseEnv) = env.initial_state`
struct Env2 <: AbstractEnv
env21::BaseEnv
env22::BaseEnv
end
struct Env <: AbstractEnv
env1::BaseEnv
env2::Env2
gain::Float64
end
# differential equations are regarded as nested envs (NamedTuple)
function dynamics(env::Env)
return function (x, p, t)
x1 = x.env1
x21 = x.env2.env21
x22 = x.env2.env22
ẋ1 = -x1 - env.gain*sum(x21 + x22)
ẋ21 = -x21
ẋ22 = -x22
(; env1 = ẋ1, env2 = (; env21 = ẋ21, env22 = ẋ22))
end
end
# for convenience
function make_env()
env21, env22 = BaseEnv(reshape(collect(1:8), 2, 4)), BaseEnv(reshape(collect(9:16), 2, 4))
env1 = BaseEnv(-1)
env2 = Env2(env21, env22)
gain = 2.0
env = Env(env1, env2, gain)
env
end
# register env; do it in global scope
__env = make_env()
__x0 = NestedEnvironments.initial_condition(__env)
@reg_env __env __x0
# test
function test()
env = make_env()
# initial condition
# if you extend `NestedEnvironments.initial_condition` for all sub environments, then `NestedEnvironments.initial_condition(env::Env)` will automatically complete a readable initial condition as NamedTuple.
x0 = NestedEnvironments.initial_condition(env) # auto-completion of initial condition
@show x0 # x0 = (env1 = -1, env2 = (env21 = [1 3 5 7; 2 4 6 8], env22 = [9 11 13 15; 10 12 14 16]))
t0 = 0.0
tf = 10.0
tspan = (t0, tf)
Δt = 0.01 # saveat; not numerical integration
ts = t0:Δt:tf
prob = ODEProblem(env, dynamics(env), x0, tspan)
@time sol = solve(prob, Tsit5(), saveat=ts)
# readable
xs = sol.u |> Map(_x -> @readable _x) |> collect # nested states
@test xs[1].env1 == x0.env1
@test xs[1].env2.env21 == x0.env2.env21
@test xs[1].env2.env22 == x0.env2.env22
# raw
_x0 = @raw x0
@show _x0 # _x0 = [-1, 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16]
@test _x0 == sol.u[1]
end
```
| NestedEnvironments | https://github.com/JinraeKim/NestedEnvironments.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 749 | using Documenter, SignalTables, SignalTablesInterface_PyPlot
makedocs(
sitename = "SignalTables",
authors = "Martin Otter (DLR-SR)",
format = Documenter.HTML(prettyurls = false),
pages = [
"Home" => "index.md",
#"Getting Started" => "GettingStarted.md",
"Examples" => [
"Examples/Plots.md",
"Examples/FileIO.md",
],
"Functions" => [
"Functions/OverviewOfFunctions.md",
"Functions/Signals.md",
"Functions/SignalTables.md",
"Functions/PlotPackages.md",
"Functions/Plots.md",
],
"Internal" => [
"Internal/AbstractSignalTableInterface.md",
"Internal/AbstractPlotInterface.md",
# "internal/UtilityFunctions.md"
],
]
)
| SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 348 | module CSV_ReadFromFile
using SignalTables
import CSV
file = joinpath(SignalTables.path, "examples", "fileIO", "Rotational_First.csv")
println("\n... Read csv file \"$file\"")
sigTable = CSV.File(file)
println("\n... Show csv file as signal table")
showInfo(sigTable)
println("\ntime[1:10] = ", getSignal(sigTable, "time")[:values][1:10])
end | SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 171 | module JLD_HDF5_WriteToFile
using SignalTables
using FileIO
sigTable = getSignalTableExample("VariousTypes")
save( File(format"JLD", "VariousTypes.jld"), sigTable)
end | SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 238 | module JSON_WriteToFile
using SignalTables
sigTable = getSignalTableExample("VariousTypes")
writeSignalTable("VariousTypes_prettyPrint.json", sigTable; indent=2, log=true)
writeSignalTable("VariousTypes_compact.json" , sigTable)
end | SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 129 | module JSON_WriteToString
using SignalTables
str = signalTableToJSON( getSignalTableExample("VariousTypes") )
println(str)
end | SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 66 |
include("JSON_WriteToFile.jl")
include("JSON_WriteToString.jl")
| SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 234 | module ConstantSignals
using SignalTables
@usingPlotPackage
sigTable = getSignalTableExample("ConstantSignals")
plot(sigTable, [("phi_max", "i_max", "open"), ("matrix3[2,2]", "matrix2[1,2:3]"), "matrix1"], heading="Constants")
end | SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 175 | module MissingValues
using SignalTables
@usingPlotPackage
sigTable = getSignalTableExample("MissingValues")
plot(sigTable, [("sigC", "load.r[2:3]"), ("sigB", "sigD")])
end
| SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 204 | module OneMatrixSignal
using SignalTables
@usingPlotPackage
sigTable = getSignalTableExample("OneMatrixSignal")
plot(sigTable, ["matrix", "matrix[2,3]", "matrix[1,2:3]"], heading="Matrix signals")
end
| SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 234 | module OneMatrixSignalWithMatrixUnits
using SignalTables
@usingPlotPackage
sigTable = getSignalTableExample("OneMatrixSignalWithMatrixUnits")
plot(sigTable, ["matrix", "matrix[2,3]", "matrix[1,2:3]"], heading="Matrix signals")
end
| SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 162 | module OneScalarSignal
using SignalTables
@usingPlotPackage
sigTable = getSignalTableExample("OneScalarSignal")
plot(sigTable, "phi", heading="sine(time)")
end | SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 178 | module OneScalarSignalWithUnit
using SignalTables
@usingPlotPackage
sigTable = getSignalTableExample("OneScalarSignalWithUnit")
plot(sigTable, "phi", heading="Sine(time)")
end | SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 206 | module OneVectorSignalWithUnit
using SignalTables
@usingPlotPackage
sigTable = getSignalTableExample("OneVectorSignalWithUnit")
plot(sigTable, ["r", "r[2]", "r[2:3]"], heading="Plot vector signals")
end | SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 209 | module VariousTypes
using SignalTables
@usingPlotPackage
sigTable = getSignalTableExample("VariousTypes")
plot(sigTable, ["load.r", ("motor.w", "wm", "motor.w_c", "ref.clock")], heading="VariousTypes")
end
| SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 267 |
include("OneScalarSignal.jl")
include("OneScalarSignalWithUnit.jl")
include("OneVectorSignalWithUnit.jl")
include("OneMatrixSignal.jl")
include("OneMatrixSignalWithMatrixUnits.jl")
include("ConstantSignals.jl")
include("MissingValues.jl")
include("VariousTypes.jl")
| SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 7435 | # License for this file: MIT (expat)
# Copyright 2020-2022, DLR Institute of System Dynamics and Control
#
# This file is part of module SignalTables (is included by the PlotPackage_xxxMakie packages).
"""
prepend!(prefix, signalLegend)
Add `prefix` string in front of every element of the `signalLegend` string-Vector.
"""
function prepend!(prefix::AbstractString, signalLegend::Vector{AbstractString})
for i in eachindex(signalLegend)
signalLegend[i] = prefix*signalLegend[i]
end
return signalLegend
end
"""
plot(signalTable, names;
heading = "", grid = true, xAxis = nothing,
figure = 1, prefix = "", reuse = false, maxLegend = 10,
minXaxisTickLabels = false,
MonteCarloAsArea = true)
Generate **plots** of selected signals of a signal table using the plot package defined with
[`@usePlotPackage`]@ref`(xxx)`. Possible values for `xxx`:
`"GLMakie", "WGLMakie", "CairoMakie", "PyPlot", "SilentNoPlot"`).
`signalTable` is an instance of a type that supports the [Abstract Signal Table Interface](@ref).
Argument `names` defines the diagrams to be drawn and the signals to be included in the respective diagram:
- If `names` is a **String**, generate one diagram with one time series of the variable with key `names`.
- If `names` is a **Tuple** of Strings, generate one diagram with the time series of the variables
with the keys given in the tuple.
- If names is a **Vector** or a **Matrix** of **Strings** and/or **Tuples**,
generate a vector or matrix of diagrams.
Note, the names (and their units, if available in the signals) are automatically used as legends in the
respective diagram.
A signal variable identified by a `String` key can be a scalar of type `<:Number`
or an array of element type `<:Number`. A signal is defined by a vector of time values,
a corresponding vector of signal values, and the signal type (continuous or clocked).
Note, before passing data to the plot package,
it is converted to Float64. This allows to, for example, also plot rational numbers,
even if not supported by the plot package. `Measurements.Measurement{xxx}`
and `MonteCarloMeasurements` is specially handled.
# Optional Arguments
- `heading::AbstractString`: Optional heading above the diagram.
- `grid::Bool`: = true, to display a grid.
- `xAxis::Union{AbstractString,Nothing}`: Name of x-axis. If `xAxis=nothing`, the independent variable
of the signal table (usually `"time"` is used as x-axis.
- `figure::Int`: Integer identifier of the window in which the diagrams shall be drawn.
- `prefix::AbstractString`: String that is appended in front of every legend label
(useful especially if `reuse=true`).
- `reuse::Bool`: If figure already exists and reuse=false, clear the figure before adding the plot.
Otherwise, include the plot in the existing figure without removing the curves present in the figure.
`reuse = true` is ignored for `"WGLMakie"` (because not supported).
- `maxLegend::Int`: If the number of legend entries in one plot command `> maxLegend`,
the legend is suppressed.
All curves have still their names as labels. In PyPlot, the curves can be inspected by
their names by clicking in the toolbar of the plot on button `Edit axis, curve ..`
and then on `Curves`.
- `minXaxisTickLabels::Bool`: = true, if xaxis tick labels shall be
removed in a vector or array of plots, if not the last row
(useful when including plots in a document).
= false, x axis tick labels are always shown (useful when interactively zooming into a plot).
- `MonteCarloAsArea::Bool`: = true, if MonteCarloMeasurements values are shown with the mean value
and the area between the minimum and the maximum value of all particles.
= false, if all particles of MonteCarloMeasurements values are shown (e.g. if a value has 2000 particles,
then 2000 curves are shown in the diagram).
# Examples
```julia
using SignalTables
using Unitful
# Generate "using xxx" statement
# (where "xxx" is from a previous SignalTables.usePlotPackage("xxx"))
@usingPlotPackage
# Construct result data
t = range(0.0, stop=10.0, length=100);
result = Dict{String,Any}();
result["time"] = t*u"s";
result["phi"] = sin.(t)*u"rad";
result["w"] = cos.(t)*u"rad/s";
result["a"] = 1.2*sin.(t)*u"rad/s^2";
result["r"] = hcat(0.4 * cos.(t), 0.5 * sin.(t), 0.3*cos.(t))*u"m";
# 1 signal in one diagram (legend = "phi [rad]")
plot(result, "phi")
# 3 signals in one diagram
plot(result, ("phi", "w", "a"), figure=2)
# 3 diagrams in form of a vector (every diagram has one signal)
plot(result, ["phi", "w", "r"], figure=3)
# 4 diagrams in form of a matrix (every diagram has one signal)
plot(result, ["phi" "w";
"a" "r[2]" ], figure=4)
# 2 diagrams in form of a vector
plot(result, [ ("phi", "w"), ("a") ], figure=5)
# 4 diagrams in form of a matrix
plot(result, [ ("phi",) ("phi", "w");
("phi", "w", "a") ("r[2:3]",) ],figure=6)
# Plot w=f(phi) in one diagram
plot(result, "w", xAxis="phi", figure=7)
# Append signal of the next simulation run to figure=1
# (legend = "Sim 2: phi [rad]")
result["phi"] = 0.5*result["phi"];
plot(result, "phi", prefix="Sim 2: ", reuse=true)
```
Example of a matrix of plots:

"""
plot(result, names::AbstractString; kwargs...) = plot(result, [names] ; kwargs...)
plot(result, names::Symbol ; kwargs...) = plot(result, [string(names)]; kwargs...)
plot(result, names::Tuple ; kwargs...) = plot(result, [names] ; kwargs...)
plot(result, names::AbstractVector; kwargs...) = plot(result, reshape(names, length(names), 1); kwargs...)
"""
showFigure(figure)
| Plot package | Effect |
|:-------------|:------------------------------------|
| GLMakie | Show `figure` in the single window. |
| WGLMakie | Show `figure` in the single window. |
| CairoMakie | Call is ignored |
| PyPlot | Call is ignored |
| SilentNoPlot | Call is ignored |
# Example
```julia
using SignalTables
@usingPlotPackage
...
plot(..., figure=1)
plot(..., figure=2)
plot(..., figure=3)
showFigure(2)
showFigure(1)
```
"""
function showFigure end
"""
saveFigure(figure, file; kwargs...)
Save figure on file. The file extension defines the image format
(for example `*.png`).
| Plot package | Supported file extensions |
|:-------------|:------------------------------------|
| GLMakie | png, jpg, bmp |
| WGLMakie | png |
| CairoMakie | png, pdf, svg, eps |
| PyPlot | depends on [backend](https://matplotlib.org/stable/users/explain/backends.html) (usually: png, pdf, jpg, tiff, svg, ps, eps) |
| SilentNoPlot | Call is ignored |
# Keyword arguments
- resolution: (width::Int, height::Int) of the scene in dimensionless
units (equivalent to px for GLMakie and WGLMakie).
# Example
```julia
using SignalTables
@usingPlotPackage
...
plot(..., figure=1)
plot(..., figure=2)
saveFigure(1, "plot.png") # save in png-format
saveFigure(2, "plot.svg") # save in svg-format
```
"""
function saveFigure end
"""
closeFigure(figure)
Close `figure`.
"""
function closeFigure end
"""
closeAllFigures()
Close all figures.
"""
function closeAllFigures end
| SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 5011 | # License for this file: MIT (expat)
# Copyright 2022, DLR Institute of System Dynamics and Control (DLR-SR)
# Developer: Martin Otter, DLR-SR
#
# This file is part of module SignalTables
import Tables
"""
isSignalTable(obj)::Bool
Returns true, if `obj` is a signal table and supports the functions of the [Abstract Signal Table Interface](@ref).
"""
isSignalTable(obj) = Tables.istable(obj) && Tables.columnaccess(obj)
"""
getIndependentSignalNames(signalTable)::Vector{String}
Returns the names of the independent signals (often: ["time"]) from signalTable.
"""
function getIndependentSignalNames(obj)
if Tables.istable(obj) && Tables.columnaccess(obj)
return [string(Tables.columnnames(obj)[1])]
else
error("getIndependentSignalNames(obj) is not supported for typeof(obj) = " * string(typeof(obj)))
end
end
"""
getSignalNames(signalTable; getVar=true, getPar=true, getMap=true)::Vector{String}
Returns a string vector of the signal names that are present in signalTable
(including independent signal names).
- If getVar=true, Var(..) variables are included.
- If getPar=true, Par(..) variables are included.
- If getMap=true, Map(..) variables are included.
"""
function getSignalNames(obj; getVar=true, getPar=true, getMap=true)
if Tables.istable(obj) && Tables.columnaccess(obj)
if !getVar
return String[]
else
return string.(Tables.columnnames(obj))
end
else
error("getSignalNames(obj) is not supported for typeof(obj) = " * string(typeof(obj)))
end
end
"""
getSignal(signalTable, name::String)
Returns signal `name` from `signalTable` (that is a [`Var`](@ref), a [`Par`](@ref) or a [`Map`](@ref)).
If `name` does not exist, an error is raised.
"""
function getSignal(obj, name::String)
if Tables.istable(obj) && Tables.columnaccess(obj)
return Var(values= Tables.getcolumn(obj, Symbol(name)))
else
error("getSignal(obj, \"$name\") is not supported for typeof(obj) = " * string(typeof(obj)))
end
end
# ----------- Functions that have a default implementation ----------------------------------------
"""
hasSignal(signalTable, name::String)
Returns `true` if signal `name` is present in `signalTable`.
"""
function hasSignal(signalTable, name::String)::Bool
hasName = true
try
sig = getSignal(signalTable, name)
catch
hasName = false
end
return hasName
end
"""
getSignalInfo(signalTable, name::String)
Returns signal, but [`Var`](@ref) or [`Par`](@ref)) without :values or :value
but instead with :_eltypeOrType (eltype of the values if AbstractArray, otherwise typeof the values)
and :_size (if defined on the values)
If `name` does not exist, an error is raised.
This function is useful if only the attributes of a signal are needed, but not their values
(returning the attributes might be a *cheap* operation, whereas returning the values
might be an *expensive* operation).
"""
function getSignalInfo(signalTable, name::String)::SymbolDictType
signal = getSignal(signalTable,name)
signal2 = copy(signal)
delete!(signal2, :values)
delete!(signal2, :value)
_eltypeOrType = nothing
_size = nothing
type_available = false
size_available = false
if isVar(signal)
if haskey(signal, :values)
type_available = true
try
sig = signal[:values]
_eltypeOrType = eltypeOrType(sig)
_size = size(sig)
size_available = true
catch
size_available = false
end
end
else
if haskey(signal, :value)
type_available = true
try
sig = signal[:value]
_eltypeOrType = eltypeOrType(sig)
_size = size(sig)
size_available = true
catch
size_available = false
end
end
end
if type_available
signal2[:_eltypeOrType] = _eltypeOrType
end
if size_available
signal2[:_size] = _size
end
return signal2
end
"""
getIndependentSignalsSize(signalTable)::Dims
Returns the lengths of the independent signals as Dims.
E.g. for one independent signal of length 5 return (5,),
or for two independent signals of length 5 and 7 return (5,7).
"""
function getIndependentSignalsSize(signalTable)::Dims
sigLength = Int[]
for name in getIndependentSignalNames(signalTable)
sigSize = getSignalInfo(signalTable,name)[:_size]
if length(sigSize) != 1
error("Independent signal $name has not one dimension but has size = $sigSize")
end
push!(sigLength, sigSize[1])
end
return ntuple(i -> sigLength[i], length(sigLength))
end
"""
getDefaultHeading(signalTable, name::String)::String
Returns the default heading for a plot.
"""
getDefaultHeading(signalTable)::String = ""
| SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 5099 | #
# This file contains a function with a set of example signal tables
#
"""
getSignalTableExample(signalTableName::String; logTitle=true, logShowInfo=true)
Return an example signal table.
"""
function getSignalTableExample(signalTableName::String; logTitle=true, logShowInfo=true)::SignalTable
if logTitle
println("\n... $signalTableName (from SignalTables/src/ExampleSignalTables.jl)")
end
if signalTableName == "OneScalarSignal"
t = range(0.0, stop=10.0, length=100)
sigTable = SignalTable(
"time" => Var(values = t, independent=true),
"phi" => Var(values = sin.(t))
)
elseif signalTableName == "OneScalarSignalWithUnit"
t = range(0.0, stop=10.0, length=100)
sigTable = SignalTable(
"time" => Var(values = t, unit="s", independent=true),
"phi" => Var(values = sin.(t), unit="rad")
)
elseif signalTableName == "OneVectorSignalWithUnit"
t = range(0.0, stop=10.0, length=100)
sigTable = SignalTable(
"time" => Var(values = t, unit="s", independent=true),
"r" => Var(values = [0.4*cos.(t) 0.5*sin.(t) 0.3*cos.(t)], unit="m"),
)
elseif signalTableName == "OneMatrixSignal"
t = range(0.0, stop=1.0, length=10)
offset = Float64[11 12 13;
21 22 23]
matrix = Array{Float64,3}(undef,length(t),2,3)
for i = 1:length(t), j = 1:2, k=1:3
matrix[i,j,k] = offset[j,k] + 0.3*sin(t[i])
end
sigTable = SignalTable(
"time" => Var(values = t, independent=true),
"matrix" => Var(values = matrix)
)
elseif signalTableName == "OneMatrixSignalWithMatrixUnits"
t = range(0.0, stop=1.0, length=10)
offset = Float64[11 12 13;
21 22 23]
matrix = Array{Float64,3}(undef,length(t),2,3)
for i = 1:length(t), j = 1:2, k=1:3
matrix[i,j,k] = offset[j,k] + 0.3*sin(t[i])
end
sigTable = SignalTable(
"time" => Var(values = t, unit="s", independent=true),
"matrix" => Var(values = matrix, unit=["m" "m/s" "m/s^2";
"rad" "rad/s" "rad/s^2"])
)
elseif signalTableName == "ConstantSignals"
t = range(0.0, stop=1.0, length=5)
matrix = Float64[11 12 13;
21 22 23]
sigTable = SignalTable(
"time" => Var(values = t, unit="s", independent=true),
"phi_max" => Par(value = 1.1f0, unit="rad"),
"i_max" => Par(value = 2),
"open" => Par(value = true),
"file" => Par(value = "filename.txt"),
"matrix1" => Par(value = matrix),
"matrix2" => Par(alias="matrix1", unit="m/s"),
"matrix3" => Par(alias="matrix1", unit=["m" "m/s" "m/s^2";
"rad" "rad/s" "rad/s^2"])
)
elseif signalTableName == "MissingValues"
time1 = 0.0 : 0.1 : 3.0
time2 = 3.0 : 0.1 : 11.0
time3 = 11.0 : 0.1 : 15
t = vcat(time1,time2,time3)
sigC = vcat(fill(missing,length(time1)), 0.6*cos.(time2.+0.5), fill(missing,length(time3)))
function sigD(t, time1, time2)
sig = Vector{Union{Missing,Float64}}(undef, length(t))
j = 1
for i = length(time1)+1:length(time1)+length(time2)
if j == 1
sig[i] = 0.5*cos(t[i])
end
j = j > 3 ? 1 : j+1
end
return sig
end
sigTable = SignalTable(
"time" => Var(values=t, unit="s", independent=true),
"load.r" => Var(values=0.4*[sin.(t) cos.(t) sin.(t)], unit="m"),
"sigA" => Var(values=0.5*sin.(t), unit="m"),
"sigB" => Var(values=1.1*sin.(t), unit="m/s"),
"sigC" => Var(values=sigC, unit="N*m"),
"sigD" => Var(values=sigD(t, time1, time2), unit="rad/s", variability="clocked", info="Motor angular velocity")
)
elseif signalTableName == "VariousTypes"
t = 0.0:0.1:0.5
sigTable = SignalTable(
"_attributes" => Map(experiment=Map(stoptime=0.5, interval=0.01)),
"time" => Var(values= t, unit="s", independent=true),
"load.r" => Var(values= [sin.(t) cos.(t) sin.(t)], unit="m"),
"motor.angle" => Var(values= sin.(t), unit="rad", state=true, der="motor.w"),
"motor.w" => Var(values= cos.(t), unit="rad/s", state=true, start=1.0u"rad/s"),
"motor.w_ref" => Var(values= 0.9*[sin.(t) cos.(t)], unit = ["rad", "1/s"],
info="Reference angle and speed"),
"wm" => Var(alias = "motor.w"),
"ref.clock" => Var(values= [true, missing, missing, true, missing, missing],
variability="clock"),
"motor.w_c" => Var(values= [0.6, missing, missing, 0.8, missing, missing],
variability="clocked", clock="ref.clock"),
"motor.inertia" => Par(value = 0.02f0, unit="kg*m/s^2"),
"motor.data" => Par(value = "resources/motorMap.json")
)
else
error("getSignalTableExample(\"$signalTableName\"): unknown name.")
end
if logShowInfo
showInfo(sigTable)
println()
end
return sigTable
end | SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 1073 | # License for this file: MIT (expat)
# Copyright 2021, DLR Institute of System Dynamics and Control
module NoPlot
export plot, showFigure, saveFigure, closeFigure, closeAllFigures
include("AbstractPlotInterface.jl")
plot(signalTable, names::AbstractMatrix; heading::AbstractString="", grid::Bool=true, xAxis="time",
figure::Int=1, prefix::AbstractString="", reuse::Bool=false, maxLegend::Integer=10,
minXaxisTickLabels::Bool=false, MonteCarloAsArea=false) =
println("... plot(..): Call is ignored, because of usePlotPackage(\"NoPlot\").")
showFigure(figure::Int) = println("... showFigure($figure): Call is ignored, because of usePlotPackage(\"NoPlot\").")
closeFigure(figure::Int) = println("... closeFigure($figure): Call is ignored, because of usePlotPackage(\"NoPlot\").")
saveFigure(figure::Int, fileName::AbstractString) = println("... saveFigure($figure,\"$fileName\"): Call is ignored, because of usePlotPackage(\"NoPlot\").")
closeAllFigures() = println("... closeAllFigures(): Call is ignored, because of usePlotPackage(\"NoPlot\").")
end | SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 5720 | isinstalled(pkg::String) = any(x -> x.name == pkg && x.is_direct_dep, values(Pkg.dependencies()))
const AvailablePlotPackages = ["GLMakie", "WGLMakie", "CairoMakie", "PyPlot", "SilentNoPlot"]
const PlotPackagesStack = String[]
"""
@usingPlotPackage()
Execute `using XXX`, where `XXX` is the Plot package that was
activated with `usePlotPackage(plotPackage)`.
"""
macro usingPlotPackage()
if haskey(ENV, "SignalTablesPlotPackage")
PlotPackage = ENV["SignalTablesPlotPackage"]
if !(PlotPackage in AvailablePlotPackages)
@info "ENV[\"SignalTablesPlotPackage\"] = \"$PlotPackage\" is not supported!. Using \"SilentNoPlot\"."
@goto USE_NO_PLOT
elseif PlotPackage == "NoPlot"
@goto USE_NO_PLOT
elseif PlotPackage == "SilentNoPlot"
expr = :( using SignalTables.SilentNoPlot )
return esc( expr )
else
PlotPackage = Symbol("SignalTablesInterface_" * PlotPackage)
expr = :(using $PlotPackage)
println("$expr")
return esc( :(using $PlotPackage) )
end
elseif haskey(ENV, "MODIA_PLOT_PACKAGE")
PlotPackage = ENV["MODIA_PLOT_PACKAGE"]
if !(PlotPackage in AvailablePlotPackages)
@info "ENV[\"MODIA_PLOT_PACKAGE\"] = \"$PlotPackage\" is not supported!. Using \"SilentNoPlot\"."
@goto USE_NO_PLOT
elseif PlotPackage == "NoPlot"
@goto USE_NO_PLOT
elseif PlotPackage == "SilentNoPlot"
expr = :( using SignalTables.SilentNoPlot )
return esc( expr )
else
PlotPackage = Symbol("SignalTablesInterface_" * PlotPackage)
expr = :(using $PlotPackage)
println("$expr")
return esc( :(using $PlotPackage) )
end
else
@info "No plot package activated. Using \"SilentNoPlot\"."
@goto USE_NO_PLOT
end
@label USE_NO_PLOT
expr = :( using SignalTables.SilentNoPlot )
println("$expr")
return esc( expr )
end
"""
usePlotPackage(plotPackage::String)
Define the plot package that shall be used by command `@usingPlotPackage`.
If a PlotPackage package is already defined, save it on an internal stack
(can be reactivated with `usePreviousPlotPackage()`.
Possible values for `plotPackage`:
- `"PyPlot"`
- `"GLMakie"`
- `"WGLMakie"`
- `"CairoMakie"`
- `"SilentNoPlot"`
# Example
```julia
using SignalTables
usePlotPackage("GLMakie")
module MyTest
using SignalTables
@usingPlotPackage
t = range(0.0, stop=10.0, length=100)
result = Dict{String,Any}("time" => t, "phi" => sin.(t))
plot(result, "phi") # use GLMakie for the rendering
end
```
"""
function usePlotPackage(plotPackage::String; pushPreviousOnStack=true)::Bool
success = true
if plotPackage == "NoPlot" || plotPackage == "SilentNoPlot"
newPlot = true
if pushPreviousOnStack
if haskey(ENV, "SignalTablesPlotPackage")
push!(PlotPackagesStack, ENV["SignalTablesPlotPackage"])
elseif haskey(ENV, "MODIA_PLOT_PACKAGE")
push!(PlotPackagesStack, ENV["MODIA_PLOT_PACKAGE"])
newPlot=false
end
end
if plotPackage == "NoPlot"
if newPlot
ENV["SignalTablesPlotPackage"] = "NoPlot"
else
ENV["MODIA_PLOT_PACKAGE"] = "NoPlot"
end
else
if newPlot
ENV["SignalTablesPlotPackage"] = "SilentNoPlot"
else
ENV["MODIA_PLOT_PACKAGE"] = "SilentNoPlot"
end
end
else
plotPackageName = "SignalTablesInterface_" * plotPackage
if plotPackage in AvailablePlotPackages
# Check that plotPackage is defined in current environment
if isinstalled(plotPackageName)
newPlot = true
if pushPreviousOnStack
if haskey(ENV, "SignalTablesPlotPackage")
push!(PlotPackagesStack, ENV["SignalTablesPlotPackage"])
elseif haskey(ENV, "MODIA_PLOT_PACKAGE")
push!(PlotPackagesStack, ENV["MODIA_PLOT_PACKAGE"])
newPlot=false
end
end
if newPlot
ENV["SignalTablesPlotPackage"] = plotPackage
else
ENV["MODIA_PLOT_PACKAGE"] = plotPackage
end
else
@warn "... usePlotPackage(\"$plotPackage\"): Call ignored, since package $plotPackageName is not in your current environment"
success = false
end
else
@warn "\n... usePlotPackage(\"$plotPackage\"): Call ignored, since argument not in $AvailablePlotPackages."
success = false
end
end
return success
end
"""
usePreviousPlotPackage()
Pop the last saved PlotPackage package from an internal stack
and call `usePlotPackage(<popped PlotPackage package>)`.
"""
function usePreviousPlotPackage()::Bool
if length(PlotPackagesStack) > 0
plotPackage = pop!(PlotPackagesStack)
usePlotPackage(plotPackage, pushPreviousOnStack=false)
end
return true
end
"""
currentPlotPackage()
Return the name of the plot package as a string that was
defined with [`usePlotPackage`](@ref).
For example, the function may return "GLMakie", "PyPlot" or "NoPlot" or
or "", if no PlotPackage is defined.
"""
currentPlotPackage() = haskey(ENV, "SignalTablesPlotPackage") ? ENV["SignalTablesPlotPackage"] :
(haskey(ENV, "MODIA_PLOT_PACKAGE") ? ENV["MODIA_PLOT_PACKAGE"] : "" ) | SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 10956 |
"""
sigTable = SignalTable(args...)
Returns a new SignalTable dictionary.
Arguments `args...` are dictionary pairs where `values` must be [`Var`](@ref)(...) and/or
[`Par`](@ref)(...) and/or [`Map`](@ref)(...). Example:
The *first* argument must define the *independent* signal, that is, `Var(values=..., independent=true), ...`
and `values` must be an `AbstractVector`. Further added signals with a `:values` key, must have the
same first dimension as the independent signal.
Most dictionary operations can be applied on `sigTable`, as well as all functions
of [Overview of Functions](@ref).
# Examples
```julia
using SignalTables
using Unitful
t = 0.0:0.1:0.5
sigTable = SignalTable(
"time" => Var(values= t, unit="s", independent=true),
"load.r" => Var(values= [sin.(t) cos.(t) sin.(t)], unit="m"),
"motor.angle" => Var(values= sin.(t), unit="rad", state=true, der="motor.w"),
"motor.w" => Var(values= cos.(t), unit="rad/s"),
"motor.w_ref" => Var(values= 0.9*[sin.(t) cos.(t)], unit = ["rad", "1/s"],
info="Reference angle and speed"),
"wm" => Var(alias = "motor.w"),
"ref.clock" => Var(values= [true, missing, missing, true, missing, missing],
variability="clock"),
"motor.w_c" => Var(values= [0.8, missing, missing, 1.5, missing, missing],
variability="clocked", clock="ref.clock"),
"motor.inertia"=> Par(value = 0.02f0, unit="kg*m/s^2"),
"motor.data" => Par(value = "resources/motorMap.json"),
"attributes" => Map(experiment=Map(stoptime=0.5, interval=0.01))
)
signalInfo(sigTable)
```
This results in the following output:
```julia
name unit size eltypeOrType kind attributes
─────────────────────────────────────────────────────────────────────────────────────────────────────────
time "s" [6] Float64 Var independent=true
load.r "m" [6,3] Float64 Var
motor.angle "rad" [6] Float64 Var state=true, der="motor.w"
motor.w "rad/s" [6] Float64 Var
motor.w_ref ["rad", "1/s"] [6,2] Float64 Var info="Reference angle and speed"
wm "rad/s" [6] Float64 Var alias="motor.w"
ref.clock [6] Union{Missing,Bool} Var variability="clock"
motor.w_c [6] Union{Missing,Float64} Var variability="clocked", clock="ref.clock"
motor.inertia "kg*m/s^2" Float32 Par
motor.data String Par
attributes Map experiment=Map(stoptime=0.5, interval=0.01)
```
The command `show(IOContext(stdout, :compact => true), sigTable)` results in the following output:
```julia
SignalTable(
"time" => Var(values=0.0:0.1:0.5, unit="s", independent=true),
"load.r" => Var(values=[0.0 1.0 0.0; 0.0998334 0.995004 0.0998334; 0.198669 0.980067 0.198669; 0.29552 0.955336 0.29552; 0.389418 0.921061 0.389418; 0.479426 0.877583 0.479426], unit="m"),
"motor.angle" => Var(values=[0.0, 0.0998334, 0.198669, 0.29552, 0.389418, 0.479426], unit="rad", state=true. der="motor.w"),
"motor.w" => Var(values=[1.0, 0.995004, 0.980067, 0.955336, 0.921061, 0.877583], unit="rad/s"),
"motor.w_ref" => Var(values=[0.0 0.9; 0.0898501 0.895504; 0.178802 0.88206; 0.265968 0.859803; 0.350477 0.828955; 0.431483 0.789824], unit=["rad", "1/s"], info="Reference angle and speed"),
"wm" => Var(values=[1.0, 0.995004, 0.980067, 0.955336, 0.921061, 0.877583], unit="rad/s", alias="motor.w"),
"ref.clock" => Var(values=Union{Missing, Bool}[true, missing, missing, true, missing, missing], variability="clock"),
"ref.trigger" => Var(values=Union{Missing, Bool}[missing, missing, true, missing, true, true], variability="trigger"),
"motor.w_c" => Var(values=Union{Missing, Float64}[0.8, missing, missing, 1.5, missing, missing], variability="clocked", clock="ref.clock"),
"motor.inertia" => Par(value=0.02, unit="kg*m/s^2"),
"motor.data" => Par(value="resources/motorMap.json"),
"attributes" => Map(experiment=Map(stoptime=0.5, interval=0.01)),
)
```
"""
struct SignalTable <: AbstractDict{String,Any}
dict::StringDictType
independendentSignalNames::Vector{String}
independentSignalsSize::NTuple
function SignalTable(args...)
dict = new_signal_table()
independendentSignalNames = String[]
independentSignalLengths = Int[]
k = 0
for (key, sig) in args
if !isSignal(sig)
error("SignalTable(\"$key\" => signal, ...): The added signal is neither a Var(..) nor a Par(..) nor a Map(...)\ntypeof(signal) = $(typeof(sig))!")
end
if isVar(sig)
if haskey(sig, :values)
sig_values = sig[:values]
if !(typeof(sig_values) <: AbstractArray)
error("SignalTable(\"$key\" => signal, ...): typeof(signal[:values]) = $(typeof(sig_values)) but must be an `<: AbstractArray`!")
end
if get(sig, :independent, false)
k += 1
ndims_sig = ndims(sig_values)
if ndims_sig != 1
error("SignalTable(.., $key => ..): Independent signal $key must have one dimension, but has $ndims_sig dimensions.")
end
push!(independendentSignalNames, key)
push!(independentSignalLengths, length(sig_values))
else
for (i,val) in enumerate(independentSignalLengths)
if size(sig_values, i) != val
error("SignalTable(\"$key\" => signal, ...): size(signal[:values],$i) = $(size(sig_values,i)) but must be $val (= length of independent signal)!")
end
end
end
else
# Needs not have :values, e.g. alias
# error("SignalTable(\"$key\" => signal, ...) is a Var(..) and has no key :values which is required!")
end
if haskey(sig, :alias)
aliasName = sig[:alias]
if haskey(sig,:values)
error("SignalTable(\"$key\" => Var(values=.., alias=\"$aliasName\"...): not allowed to define values and alias together.")
elseif !haskey(dict, aliasName)
error("SignalTable(\"$key\" => Var(alias=\"$aliasName\"...): referenced signal does not exist.")
end
sigAlias = dict[aliasName]
sig = merge(sigAlias,sig)
end
elseif isPar(sig)
if haskey(sig, :alias)
aliasName = sig[:alias]
if haskey(sig,:value)
error("SignalTable(\"$key\" => Par(values=.., alias=\"$aliasName\"...): not allowed to define values and alias together.")
elseif !haskey(dict, aliasName)
error("SignalTable(\"$key\" => Par(alias=\"$aliasName\"...): referenced signal does not exist.")
end
sigAlias = dict[aliasName]
sig = merge(sigAlias,sig)
end
end
dict[key] = sig
end
new(dict, independendentSignalNames, ntuple(i -> independentSignalLengths[i], length(independentSignalLengths)))
end
end
Base.convert(::Type{StringDictType}, sig::SignalTable) = sig.dict
Base.length(sigTable::SignalTable) = length(sigTable.dict)
Base.iterate(sigTable::SignalTable) = Base.iterate(sigTable.dict)
Base.iterate(sigTable::SignalTable, iter) = Base.iterate(sigTable.dict, iter)
Base.haskey(signalTable::SignalTable, key::String) = Base.haskey(signalTable.dict, key)
Base.getindex(signalTable::SignalTable, key...) = Base.getindex(signalTable.dict, key...)
Base.get(signalTable::SignalTable, key::String, default) = Base.get(signalTable.dict, key, default)
Base.get(f::Function, signalTable::SignalTable, key::String) = Base.get(f, signalTable.dict, key)
Base.get!(signalTable::SignalTable, key::String, default) = Base.get!(signalTable.dict, key, default)
Base.get!(f::Function, signalTable::SignalTable, key::String) = Base.get!(f, signalTable.dict, key)
Base.keys(signalTable::SignalTable) = Base.keys(signalTable.dict)
Base.values(signalTable::SignalTable) = Base.values(signalTable.dict)
Base.setindex!(signalTable::SignalTable, value, key...) = Base.setindex!(signalTable.dict, value, key...)
Base.getproperty(signalTable::SignalTable, key::String) = signalTable[key]
Base.pop!(signalTable::SignalTable) = Base.pop!(signalTable.dict)
Base.delete!(signalTable::SignalTable, key::String) = Base.delete!(signalTable.dict, key)
function Base.show(io::IO, sigTable::SignalTable)
print(io, "SignalTable(\n")
for (key,sig) in sigTable
if key != "_class"
Base.print(io, " ")
Base.show(io, key)
Base.print(io, " => ")
showSignal(io, sig)
print(io, ",\n")
end
end
println(io," )")
end
# Implementation of AbstractSignalTableInterface
isSignalTable( sigTable::SignalTable) = true
getIndependentSignalNames(sigTable::SignalTable) = sigTable.independendentSignalNames
getIndependentSignalsSize(sigTable::SignalTable) = sigTable.independentSignalsSize
getSignal( sigTable::SignalTable, name::String) = sigTable[name]
hasSignal( sigTable::SignalTable, name::String) = haskey(sigTable, name)
function getSignalNames(sigTable::SignalTable; getVar=true, getPar=true, getMap=true)
if getVar && getPar && getMap
sigNames = setdiff(String.(keys(sigTable)), ["_class"])
else
sigNames = String[]
for (key,value) in sigTable.dict
if getVar && isVar(value) ||
getPar && isPar(value) ||
getMap && isMap(value)
push!(sigNames, key)
end
end
end
return sigNames
end
function getDefaultHeading(sigTable::SignalTable)::String
attr = get(sigTable, "attributes", "")
if attr == ""
return ""
else
return get(attr, :plotHeading, "")
end
end
"""
toSignalTable(signalTable)::SignalTable
Returns a signalTable as instance of [`SignalTable`](@ref).
"""
function toSignalTable(sigTable)::SignalTable
if !isSignalTable(sigTable)
error("toSignalTable(obj): obj::$(typeof(sigTable)) is no signal table.")
end
sigTable2 = SignalTable()
for name in getSignalNames(sigTable)
sigTable2[name] = getSignal(sigTable,name)
end
return sigTable2
end
| SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 31047 | """
compactPaths(str::String)
Returns a compacted string, where all paths with dots are reduced to their leaf name.
Example: compactPaths("MonteCarloMeasurements.Particles") is reduced to "Particles".
"""
function compactPaths(str::String)
i1 = findfirst("{", str)
if isnothing(i1)
i2 = findlast(".", str)
else
i2 = findprev(".", str, i1[1])
end
if !isnothing(i2) && length(str) > i2[1]
str = str[i2[1]+1:end]
end
str = replace(str, " " => "") # remove blanks
return str
end
"""
dictToString(dict:AbstractDict)
"""
function dictToString(dict::AbstractDict)::String
io = IOBuffer()
str = ""
first = true
for (key,value) in dict
if first
first = false
else
show(io, ", ")
end
print(io, key, "=")
show(io, value)
end
str = String(take!(io))
return str
end
"""
new_signal_table(args...)::OrderedDict{String,Any}
Returns a new signal table, that is `OrderedDict{String,Any}("_class" => :SignalTable, args...)`
"""
new_signal_table(args...) = OrderedDict{String,Any}("_class" => :SignalTable, args...)
"""
getValues(signalTable, name)
Returns the *values* of a [`Var`](@ref) signal name from signalTable.
"""
getValues(signalTable, name::String) = getSignal(signalTable, name)[:values]
"""
getValue(signalTable, name)
Returns the *value* of a [`Par`](@ref) signal name from signalTable.
"""
getValue( signalTable, name::String) = getSignal(signalTable, name)[:value]
"""
getValuesWithUnit(signalTable, name)
Returns the *values* of a [`Var`](@ref) signal name from signalTable including its unit.
"""
getValuesWithUnit(signalTable, name::String) = begin
sig = getSignal(signalTable, name)
sigUnit = get(sig, :unit, "")
sigVal = sig[:values]
if typeof(sigUnit) <: AbstractArray
error("getValuesWithUnit(signalTable, $name) is not yet supported for unit arrays (= $sigUnit)")
elseif sigUnit != ""
sigVal = sigVal*uparse(sigUnit)
end
return sigVal
end
"""
getValueWithUnit(signalTable, name)
Returns the *value* of a [`Par`](@ref) signal name from signalTable including its unit.
"""
getValueWithUnit(signalTable, name::String) = begin
sig = getSignal(signalTable, name)
sigUnit = get(sig, :unit, "")
sigVal = sig[:value]
if typeof(sigUnit) <: AbstractArray
error("getValueWithUnit(signalTable, $name) is not yet supported for unit arrays (= $sigUnit)")
elseif sigUnit != ""
sigVal = sigVal*uparse(sigUnit)
end
end
const doNotShowAttributes = [:_class, :_eltypeOrType, :_size, :unit]
function showMapValue(iostr,mapValue)::Nothing
print(iostr, "Map(")
first = true
for (key,val) in mapValue
if key in doNotShowAttributes
continue
end
if first
first = false
else
print(iostr, ", ")
end
print(iostr, key, "=")
if isMap(val)
showMap(iostr, val)
end
show(iostr,val)
end
print(iostr, ")")
return nothing
end
"""
showInfo([io::IO=stdout,] signalTable;
sorted=false, showVar=true, showPar=true, showMap=true, showAttributes=true)
Writes info about a signal table to the output stream.
The keyword arguments define what information shall be printed
or whether the names shall be sorted or presented in definition order.
# Example
```julia
using SignalTables
using Unitful
t = 0.0:0.1:0.5
sigTable = SignalTable(
"time" => Var(values= t, unit="s", independent=true),
"load.r" => Var(values= [sin.(t) cos.(t) sin.(t)], unit="m"),
"motor.angle" => Var(values= sin.(t), unit="rad", state=true, der="motor.w"),
"motor.w" => Var(values= cos.(t), unit="rad/s"),
"motor.w_ref" => Var(values= 0.9*[sin.(t) cos.(t)], unit = ["rad", "1/s"],
info="Reference angle and speed"),
"wm" => Var(alias = "motor.w"),
"ref.clock" => Var(values= [true, missing, missing, true, missing, missing],
variability="clock"),
"motor.w_c" => Var(values= [0.8, missing, missing, 1.5, missing, missing],
variability="clocked", clock="ref.clock"),
"motor.inertia"=> Par(value = 0.02f0, unit="kg*m/s^2"),
"motor.data" => Par(value = "resources/motorMap.json"),
"attributes" => Map(experiment=Map(stoptime=0.5, interval=0.01))
)
signalInfo(sigTable)
```
results in the following output
```julia
name unit size eltypeOrType kind attributes
───────────────────────────────────────────────────────────────────────────────────────────────────────
time "s" [6] Float64 Var independent=true
load.r "m" [6,3] Float64 Var
motor.angle "rad" [6] Float64 Var state=true, der="motor.w"
motor.w "rad/s" [6] Float64 Var
motor.w_ref ["rad", "1/s"] [6,2] Float64 Var info="Reference angle and speed"
wm "rad/s" [6] Float64 Var alias="motor.w"
ref.clock [6] Union{Missing,Bool} Var variability="clock"
motor.w_c [6] Union{Missing,Float64} Var variability="clocked", clock="ref.clock"
motor.inertia "kg*m/s^2" Float32 Par
motor.data String Par
attributes Map experiment=Map(stoptime=0.5, interval=0.01)
```
"""
function showInfo(io::IO, signalTable;
sorted=false, showVar=true, showPar=true, showMap=true, showAttributes=true)::Nothing
if isnothing(signalTable)
@info "The call of showInfo(signalTable) is ignored, since the argument is nothing."
return
end
name2 = String[]
unit2 = String[]
size2 = String[]
eltypeOrType2 = String[]
kind2 = String[]
attr2 = String[]
sigNames = getSignalNames(signalTable, getVar=showVar, getPar=showPar, getMap=showMap)
if sorted
sigNames = sort(sigNames)
end
iostr = IOBuffer()
for name in sigNames
signal = getSignalInfo(signalTable, name)
kind = isVar(signal) ? "Var" : (isPar(signal) ? "Par" : "Map")
if showVar && kind == "Var" || showPar && kind == "Par" || showMap && kind == "Map"
first = true
if kind == "Par"
val = getValue(signalTable, name)
if !ismutable(val)
first = false
print(iostr, "=")
show(iostr, val)
end
end
if showAttributes
for (key,val) in signal
if key in doNotShowAttributes
continue
end
if first
first = false
else
print(iostr, ", ")
end
print(iostr, key, "=")
if isMap(val)
showMapValue(iostr, val)
else
show(iostr, val)
end
end
attr = String(take!(iostr))
end
independent = get(signal, :independent, false)
#println("$name: _type = ", get(signal, :_type, "notDefined"))
valBaseType = string( get(signal, :_eltypeOrType, "") )
valBaseType = compactPaths(valBaseType)
valSize = string( get(signal, :_size, "") )
valSize = replace(valSize, "()" => "", " " => "", ",)" => "]", "(" => "[", ")" => "]")
valUnit = get(signal, :unit, "")
if typeof(valUnit) <: AbstractString
if valUnit != ""
valUnit = "\"$valUnit\""
end
else
show(iostr, valUnit)
valUnit = String(take!(iostr))
#valUnit = replace(valUnit, "; " => ";\n")
end
push!(name2 , name)
push!(unit2 , valUnit)
push!(size2 , valSize)
push!(eltypeOrType2, valBaseType)
push!(kind2 , kind)
if showAttributes
push!(attr2, attr)
end
end
end
if showAttributes
infoTable = DataFrames.DataFrame(name=name2, unit=unit2, size=size2, eltypeOrType=eltypeOrType2, kind=kind2, attributes=attr2)
else
infoTable = DataFrames.DataFrame(name=name2, unit=unit2, size=size2, eltypeOrType=eltypeOrType2, kind=kind2)
end
show(io, infoTable, show_row_number=false, summary=false, allcols=true, eltypes=false, truncate=50) # rowlabel=Symbol("#")
println(io)
return nothing
end
showInfo(signalTable; kwargs...) = showInfo(stdout, signalTable; kwargs...)
const TypesForPlotting = [Float64, Float32, Int]
nameWithUnit(name::String, unit::String) = unit == "" ? name : string(name, " [", unit, "]")
function nameWithArrayUnit(unit, indicesAsVector::Vector{Int})::String
if unit == ""
return "]"
elseif typeof(unit) == String
return string( "] [", unit, "]")
else
elementIndicesAsTuple = Tuple(i for i in indicesAsVector)
elementUnit = unit[elementIndicesAsTuple...]
return string("] [", elementUnit, "]")
end
end
#TargetElType(::Type{T}) where {T} = T
#TargetElType(::Type{Measurements.Measurement{T}}) where {T} = T
#TargetElType(::Type{MonteCarloMeasurements.Particles{T,N}}) where {T,N} = T
#TargetElType(::Type{MonteCarloMeasurements.StaticParticles{T,N}}) where {T,N} = T
#=
function eltypeOrTypeWithMeasurements(obj)
if typeof(obj) <: AbstractArray
obj1 = obj[1]
if eltype(obj1) <: Real
println("... is Real")
Tobj1 = typeof(obj1)
if hasfield(Tobj1, :particles) # MonteCarloMeasurements
btype = eltype(obj1.particles)
elseif hasfield(Tobj1, :val) && hasfield(Tobj1, :err) # Measurements
btype = typeof(obj1.val)
else
btype = eltypeOrType(obj)
end
end
else
btype = eltypeOrType(obj)
end
#catch
# btype = eltypeOrType(obj)
#end
return btype
end
function eltypeOrTypeWithMeasurements(obj)
obj_eltype = eltype(obj)
if obj_eltype <: Real
if hasfield(obj_eltype, :particles) # MonteCarloMeasurements
btype = eltype(obj1.particles)
elseif hasfield(Tobj1, :val) && hasfield(Tobj1, :err) # Measurements
btype = typeof(obj1.val)
else
btype = eltypeOrType(obj)
end
end
else
btype = eltypeOrType(obj)
end
#catch
# btype = eltypeOrType(obj)
#end
return btype
end
=#
function eltypeOrTypeWithMeasurements(obj)
obj1 = typeof(obj) <: AbstractArray ? obj[1] : obj
Tobj1 = typeof(obj1)
if hasfield(Tobj1, :particles) # MonteCarloMeasurements
btype = eltype(obj1.particles)
elseif hasfield(Tobj1, :val) && hasfield(Tobj1, :err) # Measurements
btype = typeof(obj1.val)
else
btype = eltypeOrType(obj)
end
return btype
end
function getValuesFromPar(signal, len::Int)
sigValue = signal[:value]
if typeof(sigValue) <: Number || typeof(sigValue) <: AbstractArray
sigSize = (len,size(sigValue)...)
sigValues2 = Array{eltype(sigValue),ndims(sigValue)+1}(undef, sigSize)
if ndims(sigValue) == 0
for i = 1:len
sigValues2[i] = sigValue
end
else
nsig = prod(sigSize[i] for i=2:length(sigSize))
sig1 = reshape(sigValues2, (len, nsig))
sig2 = reshape(sigValue, nsig)
for i = 1:len, j=1:nsig
sig1[i,j] = sig2[j]
end
sigValues2 = reshape(sig1, sigSize)
end
return sigValues2
end
return nothing
end
"""
signal = getFlattenedSignal(signalTable, name;
missingToNaN = true,
targetInt = Int,
targetFloat = Float64)
Returns a copy of a signal where the *flattened* and *converted* values (e.g.: missing -> NaN)
are stored as `signal[:flattenedValues]` and the legend as `signal[:legend]`.
A flattened signal can be, for example, used for traditional plot functions or for traditional tables.
`signal[:flattenedValues]` is a reshape of values into a vector or a matrix with optionally the following transformations:
- `name` can be a signal name with or without array range indices (for example `name = "a.b.c[2,3:5]"`).
- If `missingToNaN=true`, then missing values are replaced by NaN values.
If NaN does not exist in the corresponding type, the values are first converted to `targetFloat`.
- If targetInt is not nothing, Int-types are converted to targetInt
- If targetFloat is not nothing, Float-types are converted to targetFloat
- collect(..) is performed on the result.
`flattenedSignal[:legend]` is a vector of strings that provides a description for every array column
(e.g. if `"name=a.b.c[2,3:5]", unit="m/s"`, then `legend = ["a.b.c[2,3] [m/s]", "a.b.c[2,3] [m/s]", "a.b.c[2,5] [m/s]"]`.
If the required transformation is not possible, a warning message is printed and `nothing` is returned.
As a special case, if signal[:values] is a vector or signal[:value] is a scalar and
an element of values or value is of type `Measurements{targetFloat}` or
`MonteCarloMeasurements{targetFloat}`, then the signal is not transformed,
so signal[:flattenedValues] = signal[:values].
"""
function getFlattenedSignal(signalTable, name::String;
missingToNaN = true,
targetInt = Int,
targetFloat = Float64)
independentSignalsSize = getIndependentSignalsSize(signalTable)
if length(independentSignalsSize) != 1
ni = length(independentSignalsSize)
@info "getFlattenedSignal(.., \"$name\") supported for one independent signal,\nbut number of independent signals = $(ni)! Signal is ignored."
return nothing
end
lenx = independentSignalsSize[1]
sigPresent = false
if hasSignal(signalTable,name)
# name is a signal name without range
signal = getSignal(signalTable,name)
if isVar(signal) && haskey(signal, :values)
sigValues = signal[:values]
elseif isPar(signal) && haskey(signal, :value)
sigValues = getValuesFromPar(signal, lenx)
if isnothing(sigValues)
@goto ERROR
end
else
@goto ERROR
end
dims = size(sigValues)
if dims[1] > 0
sigPresent = true
if length(dims) > 2
# Reshape to a matrix
sigValues = reshape(sigValues, dims[1], prod(dims[i] for i=2:length(dims)))
end
# Collect information for legend
arrayName = name
sigUnit = get(signal, :unit, "")
if length(dims) == 1
arrayIndices = ()
nScalarSignals = 1
else
varDims = dims[2:end]
arrayIndices = Tuple(1:Int(ni) for ni in varDims)
nScalarSignals = prod(i for i in varDims)
end
end
else
# Handle signal arrays, such as a.b.c[3] or a.b.c[2:3, 1:5, 3]
if name[end] == ']'
i = findlast('[', name)
if i >= 2
arrayName = name[1:i-1]
indices = name[i+1:end-1]
if hasSignal(signalTable, arrayName)
signal = getSignal(signalTable,arrayName)
if isVar(signal) && haskey(signal, :values)
sigValues = signal[:values]
elseif isPar(signal) && haskey(signal, :value)
sigValues = getValuesFromPar(signal, lenx)
if isnothing(sigValues)
@goto ERROR
end
else
@goto ERROR
end
dims = size(sigValues)
if dims[1] > 0
sigPresent = true
# Determine indices as tuple
arrayIndices = ()
try
arrayIndices = eval( Meta.parse( "(" * indices * ",)" ) )
catch
@goto ERROR
end
# Extract sub-array and collect info for legend
sigValues = getindex(sigValues, (:, arrayIndices...)...)
sigUnit = get(signal, :unit, "")
dims = size(sigValues)
nScalarSignals = length(dims) == 1 ? 1 : prod(i for i in dims[2:end])
if length(dims) > 2
# Reshape to a matrix
sigValues = reshape(sigValues, dims[1], nScalarSignals)
end
end
end
end
end
end
if !sigPresent
@goto ERROR
end
# Transform sigValues
sigElType = eltype(sigValues)
eltypeOrType2 = eltypeOrTypeWithMeasurements(sigValues)
hasMissing = isa(missing, sigElType)
if (!isnothing(targetInt) && eltypeOrType2 == targetInt ||
!isnothing(targetFloat) && eltypeOrType2 == targetFloat) &&
!(missingToNaN && hasMissing)
# Signal need not be converted - do nothing
elseif hasMissing && missingToNaN && !isnothing(targetFloat)
# sig contains missing or nothing - convert to targetFloat and replace missing by NaN
sigNaN = convert(targetFloat, NaN)
sigValues2 = Array{targetFloat, ndims(sigValues)}(undef, size(sigValues))
try
for i = 1:length(sigValues)
sigValues2[i] = ismissing(sigValues[i]) ? sigNaN : convert(targetFloat, sigValues[i])
end
catch
# Cannot be converted
@info "\"$name\" is ignored, because its element type = $sigElType\nwhich cannot be converted to targetFloat = $targetFloat."
return nothing
end
sigValues = sigValues2
elseif !hasMissing && sigElType <: Integer && !isnothing(targetInt)
# Transform to targetInt
sigValues2 = Array{targetInt, ndims(sigValues)}(undef, size(sigValues))
for i = 1:length(sigValues)
sigValues2[i] = convert(targetInt, sigValues[i])
end
sigValues = sigValues2
elseif !hasMissing && sigElType <: Real && !isnothing(targetFloat)
# Transform to targetFloat
sigValues2 = Array{targetFloat, ndims(sigValues)}(undef, size(sigValues))
for i = 1:length(sigValues)
sigValues2[i] = convert(targetFloat, sigValues[i])
end
sigValues = sigValues2
else
@goto ERROR
end
# Build legend
if arrayIndices == ()
# sig is a scalar variable
legend = String[nameWithUnit(name, sigUnit)]
else
# sig is an array variable
legend = [arrayName * "[" for i = 1:nScalarSignals]
legendIndices = Vector{Vector{Int}}(undef, nScalarSignals)
for i = 1:nScalarSignals
legendIndices[i] = Int[]
end
i = 1
sizeLength = Int[]
for j1 in eachindex(arrayIndices)
push!(sizeLength, length(arrayIndices[j1]))
i = 1
if j1 == 1
for j2 in 1:div(nScalarSignals, sizeLength[1])
for j3 in arrayIndices[1]
legend[i] *= string(j3)
push!(legendIndices[i], j3)
# println("i = $i, j2 = $j2, j3 = $j3, legend[$i] = ", legend[i], ", legendIndices[$i] = ", legendIndices[i])
i += 1
end
end
else
ncum = prod( sizeLength[1:j1-1] )
for j2 in arrayIndices[j1]
for j3 = 1:ncum
legend[i] *= "," * string(j2)
push!(legendIndices[i], j2)
# println("i = $i, j2 = $j2, j3 = $j3, legend[$i] = ", legend[i], ", legendIndices[$i] = ", legendIndices[i])
i += 1
end
end
end
end
for i = 1:nScalarSignals
legend[i] *= nameWithArrayUnit(sigUnit, legendIndices[i])
end
end
signal = copy(signal)
signal[:flattenedValues] = collect(sigValues)
signal[:legend] = legend
return signal
@label ERROR
@info "\"$name\" is ignored, because it is not defined or is not correct or has no values."
return nothing
end
# Deprecated (provided to use the plot functions without any changes
@enum SignalType Independent=1 Continuous=2 Clocked=3
function signalValuesForLinePlots(sigTable, name)
signal = getFlattenedSignal(sigTable, name)
if isnothing(signal)
return (nothing, nothing, nothing)
end
sig = signal[:flattenedValues]
sigLegend = signal[:legend]
variability = get(signal, :variability, "")
if variability == "independent"
sigKind = Independent
elseif variability == "clocked" || variability == "clock" || variability == "trigger" || get(signal, "interpolation", "") == "none"
sigKind = Clocked
else
sigKind = Continuous
end
return (sig, sigLegend, sigKind)
end
function getPlotSignal(sigTable, ysigName::AbstractString; xsigName=nothing)
(ysig, ysigLegend, ysigKind) = signalValuesForLinePlots(sigTable, ysigName)
if isnothing(ysig)
@goto ERROR
end
if isnothing(xsigName)
xNames = getIndependentSignalNames(sigTable)
if length(xNames) != 1
error("Plotting requires currently exactly one independent signal. However, getIndependentSignalNames = $getIndependentSignalNames")
end
xsigName2 = xNames[1]
else
xsigName2 = xsigName
end
(xsig, xsigLegend, xsigKind) = signalValuesForLinePlots(sigTable, xsigName2)
if isnothing(xsig)
@goto ERROR
end
# Check x-axis signal
if ndims(xsig) != 1
@info "\"$xsigName\" does not characterize a scalar variable as needed for the x-axis."
@goto ERROR
#elseif !(typeof(xsigValue) <: Real ||
# typeof(xsigValue) <: Measurements.Measurement ||
# typeof(xsigValue) <: MonteCarloMeasurements.StaticParticles ||
# typeof(xsigValue) <: MonteCarloMeasurements.Particles )
# @info "\"$xsigName\" is of type " * string(typeof(xsigValue)) * " which is not supported for the x-axis."
# @goto ERROR
end
return (xsig, xsigLegend[1], ysig, ysigLegend, ysigKind)
@label ERROR
return (nothing, nothing, nothing, nothing, nothing)
end
"""
getHeading(signalTable, heading)
Return `heading` if no empty string. Otherwise, return `defaultHeading(signalTable)`.
"""
getHeading(signalTable, heading::AbstractString) = heading != "" ? heading : getDefaultHeading(signalTable)
# ------------------------------- File IO ------------------------------------------------------
#
# Encoding and decoding Modia signal tables as JSON.
#
# Based on Modia/src/JSONModel.jl developed by Hilding Elmqvist
# License: MIT (expat)
import JSON
const TypesWithoutEncoding = Set([Float64, Int64, Bool, String, Symbol])
appendNames(name1, name2) = name1 == "" ? name2 : name1 * "." * string(name2)
"""
jsigDict = encodeSignalTable(signalTable; signalNames = nothing)
Encodes a SignalTable suitable to convert to JSON format.
If a keyword signalNames with a vector of strings is provided, then only
the corresponding signals are encoded.
"""
function encodeSignalTable(signalTable; signalNames=nothing, log=false)
if isSignalTable(signalTable)
jdict = OrderedDict{String,Any}("_class" => "SignalTable",
"_classVersion" => version_SignalTable_JSON)
if isnothing(signalNames)
signalNames = getSignalNames(signalTable)
end
for name in signalNames
signal = getSignal(signalTable, name)
if haskey(signal, :alias)
signal = copy(signal)
delete!(signal, :values)
delete!(signal, :value)
end
encodedSignal = encodeSignalTableElement(name, signal, log=log)
if !isnothing(encodedSignal)
jdict[name] = encodedSignal
end
end
return jdict
else
error("encodeSignalTable(signalTable, ...): signalTable::$(typeof(signalTable)) is no signal table.")
end
end
arrayElementBaseType(::Type{T}) where {T} = T
arrayElementBaseType(::Type{Array{T,N}}) where {T,N} = arrayElementBaseType(T)
arrayElementBaseType(::Type{Union{Missing,T}}) where {T} = T
arrayElementBaseType(A::Type{<:AbstractArray}) = arrayElementBaseType(eltype(A))
"""
jsigDict = encodeSignalTableElement(path, signalTableElement; log=false)
Encodes a signal table element suitable to convert to JSON format.
"""
function encodeSignalTableElement(path, element; log=false)
if isSignal(element)
if isVar(element)
jdict = OrderedDict{String,Any}("_class" => "Var")
elseif isPar(element)
jdict = OrderedDict{String,Any}("_class" => "Par")
else
jdict = OrderedDict{String,Any}("_class" => "Map")
end
available = false
for (key,val) in element
if key != :_class
encodedSignal = encodeSignalTableElement(appendNames(path,key),val, log=log)
if !isnothing(encodedSignal)
available = true
jdict[string(key)] = encodedSignal
end
end
end
if available
return jdict
else
return nothing
end
else
elementType = typeof(element)
if elementType <: AbstractArray && (arrayElementBaseType(elementType) <: Number || arrayElementBaseType(elementType) <: String)
if ndims(element) == 1 && arrayElementBaseType(elementType) in TypesWithoutEncoding
return element
else
elunit = unitAsParseableString(element)
if elunit == ""
if ndims(element) == 1
jdict = OrderedDict{String,Any}("_class" => "Array",
"eltype" => replace(string(eltype(element)), " " => ""),
"size" => Int[i for i in size(element)],
"values" => element
)
else
jdict = OrderedDict{String,Any}("_class" => "Array",
"eltype" => replace(string(eltype(element)), " " => ""),
"size" => Int[i for i in size(element)],
"layout" => "column-major",
"values" => reshape(element, length(element))
)
end
else
element = ustrip.(element)
jdict = OrderedDict{String,Any}("_class" => "Array",
"unit" => elunit,
"eltype" => replace(string(eltype(element)), " " => ""),
"size" => Int[i for i in size(element)],
"layout" => "column-major",
"values" => reshape(element, length(element)))
end
return jdict
end
elseif elementType in TypesWithoutEncoding
return element
elseif elementType <: Number
elunit = unitAsParseableString(element)
if elunit == ""
jdict = OrderedDict{String,Any}("_class" => "Number",
"type" => replace(string(typeof(element)), " " => ""),
"value" => element)
else
element = ustrip.(element)
jdict = OrderedDict{String,Any}("_class" => "Number",
"unit" => elunit,
"type" => replace(string(typeof(element)), " " => ""),
"value" => element)
end
return jdict
else
@info "$path::$(typeof(element)) is ignored, because mapping to JSON not known"
return nothing
end
end
end
"""
json = signalTableToJSON(signalTable; signalNames = nothing)
Returns a JSON string representation of signalTable
If keyword signalNames with a Vector of strings is provided, then a
signal table with the corresponding signals are returned as JSON string.
"""
function signalTableToJSON(signalTable; signalNames = nothing, log=false)::String
jsignalTable = encodeSignalTable(signalTable; signalNames=signalNames, log=log)
return JSON.json(jsignalTable)
end
"""
writeSignalTable(filename::String, signalTable; signalNames=nothing, indent=nothing, log=false)
Write signalTable in JSON format on file `filename`.
If keyword signalNames with a Vector of strings is provided, then a
signal table with the corresponding signals are stored on file.
If indent=<number> is given, then <number> indentation is used (otherwise, compact representation)
"""
function writeSignalTable(filename::String, signalTable; signalNames = nothing, indent=nothing, log=false)::Nothing
file = joinpath(pwd(), filename)
if log
println(" Write signalTable in JSON format on file \"$file\"")
end
jsignalTable = encodeSignalTable(signalTable; signalNames=signalNames, log=log)
open(file, "w") do io
JSON.print(io, jsignalTable, indent)
end
return nothing
end | SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 1208 | # Signal table interface for DataFrames
isSignalTable( obj::DataFrames.DataFrame) = true
getIndependentSignalNames( obj::DataFrames.DataFrame) = DataFrames.names(obj, 1)[1]
getIndependentSignalsSize(obj::DataFrames.DataFrame) = [size(obj,1)]
getSignalNames(obj::DataFrames.DataFrame) = DataFrames.names(obj)
getSignal( obj::DataFrames.DataFrame, name::String) = Var(values = obj[!,name])
hasSignal( obj::DataFrames.DataFrame, name::String) = haskey(obj, name)
"""
df = signalTableToDataFrame(signalTable)
Returns a signal table as [DataFrame](https://github.com/JuliaData/DataFrames.jl) object.
"""
function signalTableToDataFrame(sigTable)::DataFrames.DataFrame
names = getSignalNames(sigTable; getPar=false, getMap=false)
name = names[1]
df = DataFrames.DataFrame(name = getSignal(sigTable,name)[:values])
for i in 2:length(names)
name = names[i]
sig = getSignal(sigTable,name)
sigValues = sig[:values]
if typeof(sigValues) <: AbstractVector
df[!,name] = sig[:values]
else
@info "$name::$(typeof(sigValues)) is ignored, because no Vector"
end
end
return df
end
| SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 1453 | module SignalTables
const path = dirname(dirname(@__FILE__))
const version = "0.4.2"
const version_SignalTable_JSON = "0.4.2" # version tag to be stored in JSON files
using OrderedCollections
using Unitful
using Test
import DataFrames
#import Measurements
#import MonteCarloMeasurements
import Pkg
# Signals
export SignalType, Var, Par, Map, isVar, isPar, isMap, isSignal, showSignal, eltypeOrType, quantity, unitAsParseableString
# Abstract Signal Table Interface
export isSignalTable, getIndependentSignalNames, getSignalNames, hasSignal, getSignal, getSignalInfo, getIndependentSignalsSize, getDefaultHeading
# Signal table functions
export new_signal_table, getValues, getValue, getValuesWithUnit, getValueWithUnit, getFlattenedSignal, showInfo, getHeading
export signalTableToJSON, writeSignalTable
# SignalTable
export SignalTable, toSignalTable, signalTableToDataFrame
# Plot Package
export @usingPlotPackage, usePlotPackage, usePreviousPlotPackage, currentPlotPackage
# Examples
export getSignalTableExample
include("Signals.jl")
include("AbstractSignalTableInterface.jl")
include("AbstractPlotInterface.jl")
include("SignalTable.jl")
include("SignalTableFunctions.jl")
include("PlotPackageDefinition.jl")
include("ExampleSignalTables.jl")
include("NoPlot.jl")
include("SilentNoPlot.jl")
include("SignalTableInterface_DataFrames.jl")
#include("SilentNoPlot.jl")
#include("UserFunctions.jl")
#include("OverloadedMethods.jl")
end
| SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 12159 | # License for this file: MIT (expat)
# Copyright 2022, DLR Institute of System Dynamics and Control (DLR-SR)
# Developer: Martin Otter, DLR-SR
#
# This file is part of module SignalTables
"""
const SymbolDictType = OrderedDict{Symbol,Any}
Predefined dictionary type used for attributes.
"""
const SymbolDictType = OrderedDict{Symbol,Any}
SymbolDict(; kwargs...) = SymbolDictType(kwargs)
"""
const StringDictType = OrderedDict{String,Any}
Predefined dictionary type used for the signal dictionary.
"""
const StringDictType = OrderedDict{String,Any}
StringDict(; kwargs...) = StringDictType(kwargs)
elementBaseType(::Type{T}) where {T} = T
elementBaseType(::Type{Union{Missing,T}}) where {T} = T
"""
eltypeOrType(obj)
Returns eltype(obj), if obj is an AbstractArray and otherwise returns typeof(obj).
"""
eltypeOrType(array::AbstractArray) = eltype(array)
eltypeOrType(obj) = typeof(obj)
eltypeOrType(::Type{T}) where {T} = T <: AbstractArray ? eltype(T) : T
# Copied from Modia/src/ModelCollections.jl (= newCollection) and adapted
function newSignal(kwargs, kind)::OrderedDict{Symbol,Any}
sig = OrderedDict{Symbol, Any}(:_class => kind, kwargs...)
if kind == :Var && haskey(sig, :values)
values = sig[:values]
if !(typeof(values) <: AbstractArray)
error("Var(values=..): typeof(values) = $(typeof(values)), but must be an Array")
end
if haskey(sig, :unit)
sigUnit = sig[:unit]
if typeof(sigUnit) <: AbstractArray &&
ndims(values) != ndims(sigUnit)+1 &&
ndims(values) < 2 &&
size(values)[2:end] != size(sigUnit)
error("Var(values=..., unit=...): size(unit) = $(size(sigUnit)) and size(values)[2:end] = $(size(values)[2:end]) do not agree")
end
end
elseif kind == :Par && haskey(sig, :value)
value = sig[:value]
if haskey(sig, :unit)
sigUnit = sig[:unit]
if typeof(sigUnit) <: AbstractArray && size(value) != size(sigUnit)
error("Par(value=..., unit=...): size(unit) = $(size(sigUnit)) and size(value) = $(size(values)) do not agree")
end
end
end
return sig
end
"""
signal = Var(; kwargs...)::OrderedDict{Symbol,Any}
Returns a *variable* signal definition in form of a dictionary.
`kwargs...` are key/value pairs of variable attributes.
The *:values* key represents a *signal array* of any element type
as function of the independent signal(s) (or is the k-th independent variable).
A *signal array* has indices `[i1,i2,...,j1,j2,...]` to hold variable elements `[j1,j2,...]`
at the `[i1,i2,...]` independent signal(s). If an element of a signal array is *not defined*
it has a value of *missing*. Furthermore, additional attributes can be stored.
The following keys are recognized (all are *optional* with exception of *:values* that must be
either directly defined or via :alias):
|key | value (of type String, if not obvious from context) |
|:---------------|:------------------------------------------------------------------------------------------------------|
|`:values` | Array{T,N}: `signal[:values][i1,i2,...j1,j2,...]` is value `[j1,j2,...]` at the `[i1,i2,...]` independent signal(s), or `signal[:values][i_k]` is value `[i_k]` of the k-th independent variable. |
|`:unit` | String: Unit of all signal elements (parseable with `Unitful.uparse`), e.g., `"kg*m*s^2"`. Array{String,N}: `signal[:unit][j1,j2,...]` is unit of variable element `[j1,j2,...]`. |
|`:info` | Short description of signal (= `description` of [FMI 3.0](https://fmi-standard.org/docs/3.0/) and of [Modelica](https://specification.modelica.org/maint/3.5/MLS.html)). |
|`:independent` | = true, if independent variable (k-th independent variable is k-th Var insignal table) |
|`:variability` | `"continuous", "clocked", "clock", "discrete",` or `"tunable"` (parameter). |
|`:state` | = true, if signal is a (*continuous*, *clocked*, or *discrete*) state. |
|`:der` | String: [`getSignal`](@ref)`(signalTable, signal[:der])[:values]` is the *derivative* of `signal[:values]`.|
|`:clock` | String: [`getSignal`](@ref)`(signalTable, signal[:clock])[:values]` is the *clock* associated with `signal[:values]` (is only defined at clock ticks and otherwise is *missing*). If `Vector{String}`, a set of clocks is associated with the signal. |
|`:alias` | String: `signal[:values]` is a *reference* to [`getSignal`](@ref)`(signalTable, signal[:alias])[:values]`. The *reference* is set and attributes are merged when the Var-signal is added to the signal table. |
|`:interpolation`| Interpolation of signal points (`"linear", "none"`). If not provided, `interpolation` is deduced from `:variability` and otherwise interpolation is `"linear". |
|`:extrapolation`| Extrapolation outside the values of the independent signal (`"none"`). |
Additionally, any other signal attributes can be stored in `signal` with a desired key, such as
*Variable Types* of [FMI 3.0](https://fmi-standard.org/docs/3.0/#definition-of-types).
# Example
```julia
using SignalTables
t = (0.0:0.1:0.5)
t_sig = Var(values = t, unit=u"s", independent=true)
w_sig = Var(values = sin.(t), unit="rad/s", info="Motor angular velocity")
c_sig = Var(values = [1.0, missing, missing, 4.0, missing, missing],
variability="clocked")
b_sig = Var(values = [false, true, true, false, false, true])
a_sig = Var(alias = "w_sig")
```
"""
Var(;kwargs...) = newSignal(kwargs, :Var)
"""
signal = Par(; kwargs...)::OrderedDict{Symbol,Any}
Returns a *parameter* signal definition in form of a dictionary.
A parameter is a variable that is constant and is not a function
of the independent variables.
`kwargs...` are key/value pairs of parameter attributes.
The value of a parameter variable is stored with key *:value* in `signal`
and is an instance of any Julia type (number, string, array, tuple, dictionary, ...).
The following keys are recognized (all are *optional*):
| key | value (of type String, if not obvious from context) |
|:---------|:------------------------------------------------------------------------------------------------------|
| `:value` | `signal[:value]` is a constant value that holds for all values of the independent signals. |
| `:unit` | String: Unit of all signal elements (parseable with `Unitful.uparse`), e.g., `"kg*m*s^2"`. Array{String,N}: `signal[:unit][j1,j2,...]` is unit of variable element `[j1,j2,...]`. |
| `:info` | Short description of signal (= `description` of [FMI 3.0](https://fmi-standard.org/docs/3.0/) and of [Modelica](https://specification.modelica.org/maint/3.5/MLS.html)). |
| `:alias` | String: `signal[:value]` is a *reference* to [`getSignal`](@ref)`(signalTable, signal[:alias])[:value]`. The *reference* is set and attributes are merged when the Par-signal is added to the signal table. |
Additionally, any other signal attributes can be stored in `signal` with a desired key, such as
*Variable Types* of [FMI 3.0](https://fmi-standard.org/docs/3.0/#definition-of-types).
# Example
```julia
using SignalTables
J = Par(value = 0.02, unit=u"kg*m/s^2", info="Motor inertia")
fileNames = Par(value = ["data1.json", "data2.json"])
J_alias = Par(alias = "J")
```
"""
Par(; kwargs...) = newSignal(kwargs, :Par)
"""
signal = Map(; kwargs...)::OrderedDict{Symbol,Any}
Returns a set of key/value pairs in form of a dictionary.
A Map is used to associate a set of attributes to a Variable, Parameter or Signal Table.
The following keys are recognized (all are *optional*):
| key | value |
|:---------|:-----------------------------------------------------|
| `:info` | Short description. |
Additionally, any other signal attributes can be stored in `signal` with a desired key,
# Example
```julia
using SignalTables
sigTable = SignalTable(
J = Par(value = 0.02),
attributes = Map(author = "xyz")
)
```
"""
Map(; kwargs...) = newSignal(kwargs, :Map)
"""
isVar(signal)
Returns true, if signal is a [`Var`](@ref).
"""
isVar(signal) = typeof(signal) <: SymbolDictType && get(signal, :_class, :_) == :Var
"""
isPar(signal)
Returns true, if signal is a [`Par`](@ref).
"""
isPar(signal) = typeof(signal) <: SymbolDictType && get(signal, :_class, :_) == :Par
"""
isMap(signal)
Returns true, if signal is a [`Map`](@ref).
"""
isMap(signal) = typeof(signal) <: SymbolDictType && get(signal, :_class, :_) == :Map
"""
isSignal(signal)
Returns true, if signal is a [`Var`](@ref) or a [`Par`](@ref) or a [`Map`](@ref)
"""
isSignal(signal) = isVar(signal) || isPar(signal) || isMap(signal)
const doNotShow = [:_class] # [:_class, :_type, :_size]
"""
showSignal([io=stdout,] signal)
Prints a [`Var`](@ref)(...) or [`Par`](@ref)(...) signal to io.
"""
function showSignal(io, sig)
if isVar(sig)
print(io, Var)
elseif isPar(sig)
print(io, Par)
elseif isMap(sig)
print(io, Map)
else
print(io, typeof(sig))
end
print(io, "(")
first = true
for (key,val) in sig
if key in doNotShow
continue
end
if first
first = false
else
print(io, ", ")
end
print(io, key, "=")
show(io, val)
end
print(io, ")")
end
showSignal(sig) = showSignal(stdout, sig)
"""
quantityType = quantity(numberType, numberUnit::Unitful.FreeUnits)
Returns Quantity from numberType and numberUnit, e.g. `quantity(Float64,u"m/s")`
# Example
```julia
using SignalTables
using Unitful
mutable struct Data{FloatType <: AbstractFloat}
velocity::quantity(FloatType, u"m/s")
end
v = Data{Float64}(2.0u"mm/s")
@show v # v = Data{Float64}(0.002 m s^-1)
sig = Vector{Union{Missing,quantity(Float64,u"m/s")}}(missing,3)
append!(sig, [1.0, 2.0, 3.0]u"m/s")
append!(sig, fill(missing, 2))
@show sig # [missing, missing, missing, 1.0u"m/s", 2.0u"m/s", 3.0u"m/s", missing, missing]
```
"""
quantity(numberType, numberUnit::Unitful.FreeUnits) = Quantity{numberType, dimension(numberUnit), typeof(numberUnit)}
"""
v_unit = unitAsParseableString(v::[Number|AbstractArray])::String
Returns the unit of `v` as a string that can be parsed with `Unitful.uparse`.
This allows, for example, to store a quantity with units into a JSON File and
recover it when reading the file. This is not (easily) possible with current
Unitful functionality, because `string(unit(v))` returns a string that cannot be
parse with `uparse`. In Julia this is an unusual behavior because `string(something)`
typically returns a string representation of something that can be again parsed by Julia.
For more details, see [Unitful issue 412](https://github.com/PainterQubits/Unitful.jl/issues/412).
Most likely, `unitAsParseableString(..)` cannot handle all occuring cases.
# Examples
```julia
using SignalTables
using Unitful
s = 2.1u"m/s"
v = [1.0, 2.0, 3.0]u"m/s"
s_unit = unitAsParseableString(s) # ::String
v_unit = unitAsParseableString(v) # ::String
s_unit2 = uparse(s_unit) # :: Unitful.FreeUnits{(m, s^-1), ..., nothing}
v_unit2 = uparse(v_unit) # :: Unitful.FreeUnits{(m, s^-1), ..., nothing}
@show s_unit # = "m*s^-1"
@show v_unit # = "m*s^-1"
@show s_unit2 # = "m s^-1"
@show v_unit2 # = "m s^-1"
```
"""
unitAsParseableString(sig)::String = ""
unitAsParseableString(sigUnit::Unitful.FreeUnits)::String = replace(repr(sigUnit,context = Pair(:fancy_exponent,false)), " " => "*")
unitAsParseableString(sigValue::Number)::String = unitAsParseableString(unit(sigValue))
unitAsParseableString(sigArray::AbstractArray)::String = unitAsParseableString(unit(eltypeOrType(sigArray)))
| SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 650 | # License for this file: MIT (expat)
# Copyright 2021, DLR Institute of System Dynamics and Control
module SilentNoPlot
export plot, showFigure, saveFigure, closeFigure, closeAllFigures
include("AbstractPlotInterface.jl")
plot(signalTable, names::AbstractMatrix; heading::AbstractString="", grid::Bool=true, xAxis="time",
figure::Int=1, prefix::AbstractString="", reuse::Bool=false, maxLegend::Integer=10,
minXaxisTickLabels::Bool=false, MonteCarloAsArea=false) = nothing
showFigure(figure::Int) = nothing
closeFigure(figure::Int) = nothing
saveFigure(figure::Int, fileName::AbstractString) = nothing
closeAllFigures() = nothing
end | SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 11903 | # License for this file: MIT (expat)
# Copyright 2020-2022, DLR Institute of System Dynamics and Control
#
# This file is part of module SignalTables (is included by the SignalTablesInterface_XXMakie packages).
export plot, showFigure, saveFigure, closeFigure, closeAllFigures
#--------------------------- Utility definitions
# color definitions
const colors = ["blue1",
"green4",
"red1",
"cyan1",
"purple1",
"orange1",
"black",
"blue2",
"green3",
"red2",
"cyan2",
"purple2",
"orange2",
"grey20",
"blue3",
"green2",
"red3",
"cyan3",
"purple3",
"orange3",
"grey30",
"blue4",
"green1",
"red4",
"cyan4",
"purple4",
"orange4",
"grey40"]
mutable struct Diagram
fig
axis
row::Int
col::Int
curves::Union{AbstractVector, Nothing}
yLegend::Union{AbstractVector, Nothing}
function Diagram(fig,row,col,title)
axis = fig[row,col] = Axis(fig, title=title)
new(fig, axis, row, col, nothing, nothing)
end
end
# figures[i] is Figure instance of figureNumber = i
const figures = Dict{Int,Any}() # Dictionary of MatrixFigures
mutable struct MatrixFigure
fig
resolution
diagrams::Union{Matrix{Diagram},Nothing}
function MatrixFigure(figureNumber::Int, nrow::Int, ncol::Int, reuse::Bool, resolution)
if haskey(figures, figureNumber) && reuse
# Reuse existing figure
matrixFigure = figures[figureNumber]
if isnothing(matrixFigure.diagrams) || size(matrixFigure.diagrams) != (nrow,ncol)
error("From ModiaPlot.plot: reuse=true, but figure=$figureNumber has not $nrow rows and $ncol columns.")
end
else
# Create a new figure
fig = Figure(resolution=resolution)
diagrams = Matrix{Diagram}(undef,nrow,ncol)
matrixFigure = new(fig, resolution, diagrams)
figures[figureNumber] = matrixFigure
end
return matrixFigure
end
end
getMatrixFigure(figureNumber::Int) = figures[figureNumber]
setTheme() = set_theme!(fontsize = 12)
"""
getColor(i::Int)
Return color, given an integer (from colors)
"""
function getColor(i::Int)
j = mod(i, length(colors))
if j == 0
j = length(colors)
end
return colors[j]
end
"""
createLegend(diagram::Diagram, maxLegend)
Create a new legend in diagram
"""
function createLegend(diagram::Diagram, maxLegend::Int)::Nothing
curves = diagram.curves
yLegend = diagram.yLegend
if length(curves) > 1
nc = min(length(curves), maxLegend)
curves = curves[1:nc]
yLegend = yLegend[1:nc]
end
fig = diagram.fig
i = diagram.row
j = diagram.col
fig[i,j] = Legend(fig, curves, yLegend,
margin=[0,0,0,0], padding=[5,5,0,0], rowgap=0, halign=:right, valign=:top,
linewidth=1, labelsize=10, tellheight=false, tellwidth=false)
return nothing
end
const reltol = 0.001
function sig_max(xsig, y_min, y_max)
dy = y_max - y_min
abstol = typemax(eltype(y_min))
for (i,v) in enumerate(dy)
if v > 0.0 && v < abstol
abstol = v
end
end
@assert(abstol > 0.0)
y_max2 = similar(y_max)
for (i,value) = enumerate(y_max)
y_max2[i] = max(y_max[i], y_min[i] + max(abstol, abs(y_min[i])*reltol))
end
return y_max2
end
# Something of the following is required in the file where makie.jl is included:
# const Makie_Point2f = isdefined(GLMakie, :Point2f) ? Point2f : Point2f0
function fill_between(axis, xsig, ysig_min, ysig_max, color)
ysig_max2 = sig_max(xsig, ysig_min, ysig_max)
sig = Makie_Point2f.(xsig,ysig_min)
append!(sig, reverse(Makie_Point2f.(xsig,ysig_max2)))
push!(sig, sig[1])
return poly!(axis, sig, color = color)
end
function plotOneSignal(axis, xsig, ysig, color, ysigType, MonteCarloAsArea)
if typeof(ysig[1]) <: Measurements.Measurement
# Plot mean value signal
xsig_mean = Measurements.value.(xsig)
ysig_mean = Measurements.value.(ysig)
curve = lines!(axis, xsig_mean, ysig_mean, color=color)
# Plot area of uncertainty around mean value signal (use the same color, but transparent)
ysig_u = Measurements.uncertainty.(ysig)
ysig_max = ysig_mean + ysig_u
ysig_min = ysig_mean - ysig_u
fill_between(axis, xsig_mean, ysig_min, ysig_max, (color,0.2))
elseif typeof(ysig[1]) <: MonteCarloMeasurements.StaticParticles ||
typeof(ysig[1]) <: MonteCarloMeasurements.Particles
# Plot mean value signal
pfunctionsDefined = isdefined(MonteCarloMeasurements, :pmean)
if pfunctionsDefined
# MonteCarlMeasurements, version >= 1.0
xsig_mean = MonteCarloMeasurements.pmean.(xsig)
ysig_mean = MonteCarloMeasurements.pmean.(ysig)
else
# MonteCarloMeasurements, version < 1.0
xsig_mean = MonteCarloMeasurements.mean.(xsig)
ysig_mean = MonteCarloMeasurements.mean.(ysig)
end
xsig_mean = ustrip.(xsig_mean)
ysig_mean = ustrip.(ysig_mean)
curve = lines!(axis, xsig_mean, ysig_mean, color=color)
if MonteCarloAsArea
# Plot area of uncertainty around mean value signal (use the same color, but transparent)
if pfunctionsDefined
# MonteCarlMeasurements, version >= 1.0
ysig_max = MonteCarloMeasurements.pmaximum.(ysig)
ysig_min = MonteCarloMeasurements.pminimum.(ysig)
else
# MonteCarloMeasurements, version < 1.0
ysig_max = MonteCarloMeasurements.maximum.(ysig)
ysig_min = MonteCarloMeasurements.minimum.(ysig)
end
ysig_max = ustrip.(ysig_max)
ysig_min = ustrip.(ysig_min)
fill_between(axis, xsig_mean, ysig_min, ysig_max, (color,0.2))
else
# Plot all particle signals
value = ysig[1].particles
ysig3 = zeros(eltype(value), length(xsig))
for j in 1:length(value)
for i in eachindex(ysig)
ysig3[i] = ysig[i].particles[j]
end
ysig3 = ustrip.(ysig3)
lines!(axis, xsig, ysig3, color=(color,0.1))
end
end
else
if typeof(xsig[1]) <: Measurements.Measurement
xsig = Measurements.value.(xsig)
elseif typeof(xsig[1]) <: MonteCarloMeasurements.StaticParticles ||
typeof(xsig[1]) <: MonteCarloMeasurements.Particles
if isdefined(MonteCarloMeasurements, :pmean)
# MonteCarlMeasurements, version >= 1.0
xsig = MonteCarloMeasurements.pmean.(xsig)
else
# MonteCarlMeasurements, version < 1.0
xsig = MonteCarloMeasurements.mean.(xsig)
end
xsig = ustrip.(xsig)
end
if ysigType == SignalTables.Continuous
curve = lines!(axis, xsig, ysig, color=color)
else
curve = scatter!(axis, xsig, ysig, color=color, markersize = 5.0)
end
end
return curve
end
function addPlot(names::Tuple, diagram::Diagram, result, grid::Bool, xLabel::Bool, xAxis,
prefix::AbstractString, reuse::Bool, maxLegend::Integer, MonteCarloAsArea::Bool)
xsigLegend = ""
yLegend = String[]
curves = Any[]
i0 = isnothing(diagram.curves) ? 0 : length(diagram.curves)
for name in names
name2 = string(name)
(xsig, xsigLegend, ysig, ysigLegend, ysigType) = SignalTables.getPlotSignal(result, name2; xsigName = xAxis)
if !isnothing(xsig)
if ndims(ysig) == 1
push!(yLegend, prefix*ysigLegend[1])
push!(curves, plotOneSignal(diagram.axis, xsig, ysig, getColor(i0+1), ysigType, MonteCarloAsArea))
i0 = i0 + 1
else
for i = 1:size(ysig,2)
curve = plotOneSignal(diagram.axis, xsig, ysig[:,i], getColor(i0+i), ysigType, MonteCarloAsArea)
push!(yLegend, prefix*ysigLegend[i])
push!(curves, curve)
end
i0 = i0 + size(ysig,2)
end
end
end
#PyPlot.grid(grid)
if reuse
diagram.curves = append!(diagram.curves, curves)
diagram.yLegend = append!(diagram.yLegend, yLegend)
else
diagram.curves = curves
diagram.yLegend = yLegend
end
createLegend(diagram, maxLegend)
if xLabel && !reuse && xsigLegend !== nothing
diagram.axis.xlabel = xsigLegend
end
end
addPlot(name::AbstractString, args...) = addPlot((name,) , args...)
addPlot(name::Symbol , args...) = addPlot((string(name),), args...)
#--------------------------- Plot function
function plot(result, names::AbstractMatrix; heading::AbstractString="", grid::Bool=true, xAxis=nothing,
figure::Int=1, prefix::AbstractString="", reuse::Bool=false, maxLegend::Integer=10,
minXaxisTickLabels::Bool=false, MonteCarloAsArea=false)
if isnothing(result)
@info "The call of ModiaPlot.plot(result, ...) is ignored, since the first argument is nothing."
return
end
if !reusePossible
reuse=false
end
# Plot a vector or matrix of diagrams
setTheme()
(nrow, ncol) = size(names)
matrixFigure = MatrixFigure(figure, nrow, ncol, reuse, (min(ncol*600,1500), min(nrow*350, 900)))
fig = matrixFigure.fig
xAxis2 = isnothing(xAxis) ? xAxis : string(xAxis)
heading2 = SignalTables.getHeading(result, heading)
hasTopHeading = !reuse && ncol > 1 && heading2 != ""
# Add diagrams
lastRow = true
xLabel = true
for i = 1:nrow
lastRow = i == nrow
for j = 1:ncol
if reuse
diagram = matrixFigure.diagrams[i,j]
else
if ncol == 1 && i == 1 && !hasTopHeading
diagram = Diagram(fig, i, j, heading2)
else
diagram = Diagram(fig, i, j, "")
end
matrixFigure.diagrams[i,j] = diagram
end
xLabel = !( minXaxisTickLabels && !lastRow )
addPlot(names[i,j], diagram, result, grid, xLabel, xAxis2, prefix, reuse, maxLegend, MonteCarloAsArea)
end
end
# Add overall heading in case of a matrix of diagrams (ncol > 1) and add a figure label on the top level
if hasTopHeading
fig[0,:] = Label(fig, heading2, fontsize = 14)
end
if showFigureStringInDiagram
figText = fig[1,1,TopLeft()] = Label(fig, "showFigure(" * string(figure) * ")", fontsize=9, color=:blue, halign = :left)
if hasTopHeading
figText.padding = (0, 0, 5, 0)
else
figText.padding = (0, 0, 30, 0)
end
end
# Update and display fig
trim!(fig.layout)
#update!(fig.scene)
if callDisplayFunction
display(fig)
end
return matrixFigure
end
| SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 1282 |
include("SignalTableFunctions/test_SignalTypes.jl")
include("SignalTableFunctions/test_SignalTable.jl")
include("SignalTableFunctions/test_DataFrames.jl")
include("SignalTableFunctions/test_json.jl")
include("../examples/plots/_include_all.jl")
include("../examples/fileIO/_include_all.jl")
#=
include("LinePlots/test_06_OneScalarMeasurementSignal.jl")
include("LinePlots/test_07_OneScalarMeasurementSignalWithUnit.jl")
=#
include("LinePlots/test_20_SeveralSignalsInOneDiagram.jl")
include("LinePlots/test_21_VectorOfPlots.jl")
include("LinePlots/test_22_MatrixOfPlots.jl")
include("LinePlots/test_23_MatrixOfPlotsWithTimeLabelsInLastRow.jl")
include("LinePlots/test_24_Reuse.jl")
include("LinePlots/test_25_SeveralFigures.jl")
include("LinePlots/test_26_TooManyLegends.jl")
#=
include("LinePlots/test_51_OneScalarMonteCarloMeasurementsSignal.jl")
include("LinePlots/test_52_MonteCarloMeasurementsWithDistributions.jl")
# include("test_71_Tables_Rotational_First.jl") # deactivated, because "using CSV"
include("test_72_ResultDictWithMatrixOfPlots.jl")
include("test_80_Warnings.jl")
include("test_81_SaveFigure.jl")
include("test_82_AllExportedFunctions.jl")
=#
# include("test_90_CompareOneScalarSignal.jl")
# include("test_91_CompareOneScalarSignalWithUnit.jl") | SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 254 | module Runtests
# Run all tests with SilentNoPlot (so not plots)
using SignalTables
using SignalTables.Test
@testset "Test SignalTables/test" begin
usePlotPackage("SilentNoPlot")
include("include_all.jl")
usePreviousPlotPackage()
end
end
| SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 435 | module test_06_OneScalarMeasurementSignal
using SignalTables
using SignalTables.Unitful
using SignalTables.Measurements
@usingPlotPackage
t = range(0.0, stop=10.0, length=100)
c = ones(size(t,1))
sigTable = SignalTable(
"time" => t
"phi" => [sin(t[i]) ± 0.1*c[i] for i in eachindex(t)]
println("\n... test_06_OneScalarMeasurementSignal.jl:")
showInfo(sigTable)
plot(sigTable, "phi", heading="Sine(time) with Measurement")
end | SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 461 | module test_07_OneScalarMeasurementSignalWithUnit
using SignalTables
using SignalTables.Unitful
using SignalTables.Measurements
@usingPlotPackage
t = range(0.0, stop=10.0, length=100)
c = ones(size(t,1))
sigTable = SignalTable(
"time" => t*u"s"
"phi" => [sin(t[i]) ± 0.1*c[i] for i in eachindex(t)]*u"rad"
println("\n... test_07_OneScalarMeasurementSignalWithUnit:")
showInfo(sigTable)
plot(sigTable, "phi", heading="Sine(time) with Measurement")
end
| SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 632 | module test_20_SeveralSignalsInOneDiagram
using SignalTables
@usingPlotPackage
t = range(0.0, stop=10.0, length=100)
sigTable = SignalTable(
"time" => Var(values = t , unit="s", independent=true),
"phi" => Var(values = sin.(t) , unit="rad"),
"phi2" => Var(values = 0.5*sin.(t), unit="rad"),
"w" => Var(values = cos.(t) , unit="rad/s"),
"w2" => Var(values = 0.6*cos.(t), unit="rad/s"),
"A" => Par(value = 0.6)
)
println("\n... test_20_SeveralSignalsInOneDiagram:")
showInfo(sigTable)
plot(sigTable, ("phi", "phi2", "w", "w2", "A"), heading="Several signals in one diagram")
end
| SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 546 | module test_21_VectorOfPlots
using SignalTables
@usingPlotPackage
t = range(0.0, stop=10.0, length=100)
sigTable = SignalTable(
"time" => Var(values=t, unit="s", independent=true),
"phi" => Var(values=sin.(t), unit="rad"),
"phi2" => Var(values=0.5 * sin.(t), unit="rad"),
"w" => Var(values=cos.(t), unit="rad/s"),
"w2" => Var(values=0.6 * cos.(t), unit="rad/s")
)
println("\n... test_21_VectorOfPlots:")
showInfo(sigTable)
plot(sigTable, ["phi2", ("w",), ("phi", "phi2", "w", "w2")], heading="Vector of plots")
end | SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 694 | module test_22_MatrixOfPlots
using SignalTables
@usingPlotPackage
t = range(0.0, stop=10.0, length=100)
sigTable = SignalTable(
"time" => Var(values = t, unit="s", independent=true),
"phi" => Var(values = sin.(t), unit="rad"),
"phi2" => Var(values = 0.5 * sin.(t), unit="rad"),
"w" => Var(values = cos.(t), unit="rad/s"),
"w2" => Var(values = 0.6 * cos.(t), unit="rad/s"),
"r" => Var(values = [0.4 * cos.(t) 0.5 * sin.(t) 0.3 * cos.(t)], unit="m")
)
println("\n... test_22_MatrixOfPlots:")
showInfo(sigTable)
plot(sigTable, [ ("phi", "r") ("phi", "phi2", "w");
("w", "w2", "phi2") "w" ], heading="Matrix of plots")
end | SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 856 | module test_23_MatrixOfPlotsWithTimeLabelsInLastRow
using SignalTables
using SignalTables.Unitful
@usingPlotPackage
t = range(0.0, stop=10.0, length=100)
sigTable = SignalTable(
"time" => Var(values = t, unit="s", independent=true),
"phi" => Var(values = sin.(t), unit="rad"),
"phi2" => Var(values = 0.5 * sin.(t), unit="rad"),
"w" => Var(values = cos.(t), unit="rad/s"),
"w2" => Var(values = 0.6 * cos.(t), unit="rad/s"),
"r" => Var(values = [0.4 * cos.(t) 0.5 * sin.(t) 0.3 * cos.(t)], unit="m")
)
println("\n... test_23_MatrixOfPlotsWithTimeLabelsInLastRow:")
showInfo(sigTable)
plot(sigTable, [ ("phi", "r") ("phi", "phi2", "w");
("w", "w2", "phi2") ("phi", "w") ],
minXaxisTickLabels = true,
heading="Matrix of plots with time labels in last row")
end | SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 682 | module test_24_Reuse
using SignalTables
@usingPlotPackage
t = range(0.0, stop=10.0, length=100)
sigTable1 = SignalTable(
"time" => Var(values=t, unit="s", independent=true),
"phi" => Var(values=sin.(t), unit="rad"),
"w" => Var(values=cos.(t), unit="rad/s")
)
sigTable2 = SignalTable(
"time" => Var(values=t, unit="s"),
"phi" => Var(values=1.2*sin.(t), unit="rad", independent=true),
"w" => Var(values=0.8*cos.(t), unit="rad/s")
)
println("\n... test_24_Reuse:")
showInfo(sigTable1)
println()
showInfo(sigTable2)
plot(sigTable1, ("phi", "w"), prefix="Sim 1:", heading="Test reuse")
plot(sigTable2, ("phi", "w"), prefix="Sim 2:", reuse=true)
end | SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 767 | module test_25_SeveralFigures
using SignalTables
@usingPlotPackage
t = range(0.0, stop=10.0, length=100)
sigTable = SignalTable(
"time" => Var(values = t, unit="s", independent=true),
"phi" => Var(values = sin.(t), unit="rad"),
"phi2" => Var(values = 0.5 * sin.(t), unit="rad"),
"w" => Var(values = cos.(t), unit="rad/s"),
"w2" => Var(values = 0.6 * cos.(t), unit="rad/s"),
"r" => Var(values = [0.4 * cos.(t) 0.5 * sin.(t) 0.3 * cos.(t)], unit="m")
)
println("\n... test_25_SeveralFigures:")
showInfo(sigTable)
plot(sigTable, ("phi", "r") , heading="First figure" , figure=1)
plot(sigTable, ["w", "w2", "r[2]"], heading="Second figure", figure=2)
plot(sigTable, "r" , heading="Third figure" , figure=3)
end
| SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 651 | module test_26_TooManyLegends
using SignalTables
@usingPlotPackage
t = range(0.0, stop=10.0, length=100)
sigTable = SignalTable(
"time" => Var(values = t, unit="s", independent=true),
"phi" => Var(values = sin.(t), unit="rad"),
"phi2" => Var(values = 0.5 * sin.(t), unit="rad"),
"w" => Var(values = cos.(t), unit="rad/s"),
"w2" => Var(values = 0.6 * cos.(t), unit="rad/s"),
"r" => Var(values = [0.4 * cos.(t) 0.5 * sin.(t) 0.3 * cos.(t)], unit="m")
)
println("\n... test_26_TooManyLegends:")
showInfo(sigTable)
plot(sigTable, ("phi", "r", "w", "w2"),
maxLegend = 5,
heading = "Too many legends")
end | SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 510 | module test_51_OneScalarMonteCarloMeasurementsSignal
using SignalTables
using SignalTables.Unitful
using SignalTables.MonteCarloMeasurements
@usingPlotPackage
t = range(0.0, stop=10.0, length=100)
c = ones(size(t,1))
sigTable = SignalTable(
"time" => t*u"s"
"phi" => [sin(t[i]) ± 0.1*c[i] for i in eachindex(t)]*u"rad"
println("\n... test_51_OneScalarMonteCarloMeasurementsSignal:")
showInfo(sigTable)
plot(sigTable, "phi", MonteCarloAsArea=true, heading="Sine(time) with MonteCarloMeasurements")
end | SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 1219 | module test_52_MonteCarloMeasurementsWithDistributions
using SignalTables
using SignalTables.Unitful
using SignalTables.MonteCarloMeasurements
using SignalTables.MonteCarloMeasurements.Distributions
@usingPlotPackage
t = range(0.0, stop=10.0, length=100)
uniform1(xmin,xmax) = MonteCarloMeasurements.Particles( 100,Distributions.Uniform(xmin,xmax))
uniform2(xmin,xmax) = MonteCarloMeasurements.StaticParticles(100,Distributions.Uniform(xmin,xmax))
particles1 = uniform1(-0.4, 0.4)
particles2 = uniform2(-0.4, 0.4)
sigTable = SignalTable(
# ∓ are 100 StaticParticles uniform distribution
"time" => t*u"s"
sigTable["phi1"] = [sin(t[i]) + particles1*t[i]/10.0 for i in eachindex(t)]*u"rad"
"phi2" => [sin(t[i]) + particles2*t[i]/10.0 for i in eachindex(t)]*u"rad"
sigTable["phi3"] = [sin(t[i]) ∓ 0.4*t[i]/10.0 for i in eachindex(t)]*u"rad"
println("\n... test_52_MonteCarloMeasurementsWithDistributions:")
showInfo(sigTable)
plot(sigTable, ["phi1", "phi2", "phi3"], figure=1,
heading="Sine(time) with MonteCarloParticles/StaticParticles (plot area)")
plot(sigTable, ["phi1", "phi2", "phi3"], figure=2,
heading="Sine(time) with MonteCarloParticles/StaticParticles (plot all runs)")
end
| SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 639 | module test_71_Tables_Rotational_First
using SignalTables
using SignalTables.DataFrames
using CSV
SignalTables.@usingPlotPackage
sigTable1 = CSV.File("$(SignalTables.path)/test/test_71_Tables_Rotational_First.csv")
sigTable2 = DataFrames.DataFrame(sigTable1)
println("\n... test_71_Tables_Rotational_First.jl:")
println("CSV-Table (sigTable1 = CSV.File(fileName)):\n")
showInfo(sigTable1)
println("\nDataFrame-Table (sigTable2 = DataFrame(sigTable1)):\n")
showInfo(sigTable2)
plot(sigTable1, ["damper.w_rel", "inertia3.w"], prefix="sigTable1: ")
plot(sigTable2, ["damper.w_rel", "inertia3.w"], prefix="sigTable2: ", reuse=true)
end
| SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 1306 | module test_72_ResultDictWithMatrixOfPlots
using SignalTables
using SignalTables.Unitful
SignalTables.@usingPlotPackage
tr = [0.0, 15.0]
t0 = (tr, tr, SignalTables.Independent)
t1 = (0.0 : 0.1 : 15.0)
t2 = (0.0 : 0.1 : 3.0)
t3 = (5.0 : 0.3 : 9.5)
t4 = (11.0 : 0.1 : 15.0)
sigA1 = 0.9*sin.(t2)u"m"
sigA2 = cos.(t3)u"m"
sigA3 = 1.1*sin.(t4)u"m"
R2 = [[0.4 * cos(t), 0.5 * sin(t), 0.3 * cos(t)] for t in t2]u"m"
R4 = [[0.2 * cos(t), 0.3 * sin(t), 0.2 * cos(t)] for t in t4]u"m"
sigA = ([t2,t3,t4], [sigA1,sigA2,sigA3 ], SignalTables.Continuous)
sigB = ([t1] , [0.7*sin.(t1)u"m/s"], SignalTables.Continuous)
sigC = ([t3] , [sin.(t3)u"N*m"] , SignalTables.Clocked)
r = ([t2,t4] , [R2,R4] , SignalTables.Continuous)
sigTable = SignalTables.ResultDict("time" => t0,
"sigA" => sigA,
"sigB" => sigB,
"sigC" => sigC,
"r" => r,
defaultHeading = "Signals from test_72_ResultDictWithMatrixOfPlots",
hasOneTimeSignal = false)
println("\n... test_72_ResultDictWithMatrixOfPlots.jl:\n")
showInfo(sigTable)
plot(sigTable, [("sigA", "sigB", "sigC"), "r[2:3]"])
end
| SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 1279 | module test_72_ResultDictWithMatrixOfPlotsb
using SignalTables
using SignalTables.Unitful
SignalTables.@usingPlotPackage
tr = [0.0, 15.0]
t0 = (tr, tr, SignalTables.Independent)
t1 = (0.0 : 0.1 : 15.0)
t2 = (0.0 : 0.1 : 3.0)
t3 = (5.0 : 0.3 : 9.5)
t4 = (11.0 : 0.1 : 15.0)
sigA1 = 0.9*sin.(t2)u"m"
sigA2 = cos.(t3)u"m"
sigA3 = 1.1*sin.(t4)u"m"
R2 = [[0.4 * cos(t), 0.5 * sin(t), 0.3 * cos(t)] for t in t2]u"m"
R4 = [[0.2 * cos(t), 0.3 * sin(t), 0.2 * cos(t)] for t in t4]u"m"
sigA = ([t2,t3,t4], [sigA1,sigA2,sigA3 ], SignalTables.Continuous)
sigB = ([t1] , [0.7*sin.(t1)u"m/s"], SignalTables.Continuous)
sigC = ([t3] , [sin.(t3)u"N*m"] , SignalTables.Clocked)
r = ([t2,t4] , [R2,R4] , SignalTables.Continuous)
sigTable = SignalTables.ResultDict("time" => t0,
"sigA" => sigA,
"sigB" => sigB,
"sigC" => sigC,
"r" => r,
defaultHeading = "Segmented time signals",
hasOneTimeSignal = false)
println("\n... test_72_ResultDictWithMatrixOfPlots.jl:\n")
showInfo(sigTable)
plot(sigTable, [("sigA", "sigB", "sigC"), "r[2:3]"])
end
| SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 927 | module test_80_Warnings
using SignalTables
using SignalTables.Unitful
SignalTables.@usingPlotPackage
t = range(0.0, stop=10.0, length=100)
t2 = range(0.0, stop=10.0, length=110)
sigTable = SignalTable(
"time" => t*u"s"
"phi" => sin.(t)u"rad"
"phi2" => 0.5 * sin.(t)u"rad"
"w" => cos.(t)u"rad/s"
"w2" => 0.6 * cos.(t)u"rad/s"
"r" = [[0.4 * cos(t[i]),
0.5 * sin(t[i]),
0.3 * cos(t[i])] for i in eachindex(t)]*u"m"
sigTable["nothingSignal"] = nothing
sigTable["emptySignal"] = Float64[]
sigTable["wrongSizeSignal"] = sin.(t2)u"rad"
println("\n... test_40_Warnings")
showInfo(sigTable)
plot(sigTable, ("phi", "r", "signalNotDefined"), heading="Plot with warning 1" , figure=1)
plot(sigTable, ("signalNotDefined",
"nothingSignal",
"emptySignal",
"wrongSizeSignal"),
heading="Plot with warning 2" , figure=2)
end | SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 369 | module test_81_SaveFigure
import @usingPlotPackage
SignalTables.@usingPlotPackage
println("\n... test test_81_SaveFigure.jl:\n")
t = range(0.0, stop=10.0, length=100)
sigTable = Dict{String,Any}("time" => t, "phi" => sin.(t))
info = SignalTables.sigTableInfo(sigTable)
showInfo(sigTable)
plot(sigTable, "phi", figure=2)
saveFigure(2, "test_saveFigure2.png")
end | SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 464 | module test_82_AllExportedFunctions
import @usingPlotPackage
SignalTables.@usingPlotPackage
# Test the Figure operations
println("\n... test test_82_AllExportedFunctions.jl:\n")
t = range(0.0, stop=10.0, length=100)
sigTable = Dict{String,Any}("time" => t, "phi" => sin.(t))
info = SignalTables.sigTableInfo(sigTable)
showInfo(sigTable)
plot(sigTable, "phi", figure=2)
showFigure(2)
saveFigure(2, "test_saveFigure.png")
closeFigure(2)
closeAllFigures()
end | SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 2407 | module test_90_CompareOneScalarSignal
using SignalTables
using SignalTables.DataFrames
SignalTables.@usingPlotPackagePackage
t1 = range(0.0, stop=10.0, length=100)
t2 = deepcopy(t1)
t3 = range(0.0 , stop=10.0 , length=112)
t4 = range(-0.1, stop=10.1, length=111)
sigTable1 = OrderedDict{String,Any}()
sigTable2 = DataFrame()
sigTable3 = DataFrame()
sigTable4 = DataFrame()
sigTable1["time"] = t1
sigTable1["phi"] = sin.(t1)
sigTable2."time" = t2
sigTable2."phi" = sin.(t2)
sigTable3[!,"time"] = t3
sigTable3[!,"phi"] = sin.(t3)
sigTable4."time" = t4
sigTable4."phi" = sin.(t4.+0.01)
# Check makeSameTimeAxis
(sigTable1b, sigTable2b, sameTimeRange1) = SignalTables.makeSameTimeAxis(sigTable1, sigTable2, select=["phi", "w"])
println("sameTimeRange1 = ", sameTimeRange1)
(sigTable1c, sigTable3b, sameTimeRange3) = SignalTables.makeSameTimeAxis(sigTable1, sigTable3)
println("sameTimeRange3 = ", sameTimeRange3)
(sigTable1d, sigTable4b, sameTimeRange4) = SignalTables.makeSameTimeAxis(sigTable1, sigTable4)
println("sameTimeRange4 = ", sameTimeRange4)
# check compareResults
(success2, diff2, diff_names2, max_error2, within_tolerance2) = SignalTables.compareResults(sigTable1, sigTable2)
println("success2 = $success2, max_error2 = $max_error2, within_tolerance2 = $within_tolerance2")
(success3, diff3, diff_names3, max_error3, within_tolerance3) = SignalTables.compareResults(sigTable1, sigTable3)
println("success3 = $success3, max_error3 = $max_error3, within_tolerance3 = $within_tolerance3")
(success4, diff4, diff_names4, max_error4, within_tolerance4) = SignalTables.compareResults(sigTable1, sigTable4)
println("success4 = $success4, max_error4 = $max_error4, within_tolerance4 = $within_tolerance4")
plot(sigTable1, "phi", prefix="r1.")
plot(sigTable2, "phi", prefix="r2.", reuse=true)
plot(sigTable3, "phi", prefix="r3.", reuse=true)
plot(sigTable4, "phi", prefix="r4.", reuse=true)
plot(sigTable1b, "phi", prefix="r1b.", reuse=true)
plot(sigTable2b, "phi", prefix="r2b.", reuse=true)
plot(sigTable1c, "phi", prefix="r1c.", reuse=true)
plot(sigTable3b, "phi", prefix="r3b.", reuse=true)
plot(sigTable1d, "phi", prefix="r1d.", reuse=true)
plot(sigTable4b, "phi", prefix="r4b.", reuse=true)
plot(diff2, "phi", prefix="diff2_", figure=2)
plot(diff3, "phi", prefix="diff3_", figure=2, reuse=true)
plot(diff4, "phi", prefix="diff4_", figure=2, reuse=true)
end
| SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 1140 | module test_91_CompareOneScalarSignalWithUnit
using SignalTables
using SignalTables.Unitful
using SignalTables.DataFrames
SignalTables.@usingPlotPackagePackage
t = range(0.0, stop=10.0, length=100)
sigTable1 = DataFrame()
sigTable2 = DataFrame()
sigTable3 = DataFrame()
sigTable1."time" = t*u"s"
sigTable1."w" => sin.(t)*u"rad/s"
sigTable2."time" = t*u"s"
sigTable2."w" => 0.0005*u"rad/s" .+ sin.(t)*u"rad/s"
sigTable3."time" = t
sigTable3."w" => sin.(t.+0.001)
(success2, diff2, diff_names2, max_error2, within_tolerance2) = SignalTables.compareResults(sigTable1, sigTable2)
println("success2 = $success2, max_error2 = $max_error2, within_tolerance2 = $within_tolerance2")
(success3, diff3, diff_names3, max_error3, within_tolerance3) = SignalTables.compareResults(sigTable1, sigTable3)
println("success3 = $success3, max_error3 = $max_error3, within_tolerance3 = $within_tolerance3")
plot(sigTable1, "w", prefix="r1.")
plot(sigTable2, "w", prefix="r2.", reuse=true)
plot(sigTable3, "w", prefix="r3.", reuse=true)
plot(diff2, "w", prefix="diff2_", figure=2)
plot(diff3, "w", prefix="diff3_", figure=2, reuse=true)
end
| SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 439 | module test_DataFrames
using SignalTables
import SignalTables.DataFrames
println("\n... Convert DataFrame to SignalTable object")
t = range(0.0, stop=10.0, length=10)
df = DataFrames.DataFrame(time=t, phi=sin.(t))
@show df
sigTable = toSignalTable(df)
showInfo(sigTable)
println("\n... Convert SignalTable to DataFrame object")
sigTable2 = getSignalTableExample("VariousTypes")
df2 = signalTableToDataFrame(sigTable2)
@show df2
end | SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 1787 | module test_SignalTables
using SignalTables
using SignalTables.Unitful
using SignalTables.Test
t = 0.0:0.1:0.5
sigTable = SignalTable(
"time" => Var(values= t, unit="s", independent=true),
"load.r" => Var(values= [sin.(t) cos.(t) sin.(t)], unit="m"),
"motor.angle" => Var(values= sin.(t), unit="rad", state=true, der="motor.w"),
"motor.w" => Var(values= cos.(t), unit="rad/s"),
"motor.w_ref" => Var(values= 0.9*[sin.(t) cos.(t)], unit = ["rad", "1/s"],
info="Reference angle and speed"),
"wm" => Var(alias = "motor.w"),
"ref.clock" => Var(values= [true, missing, missing, true, missing, missing],
variability="clock"),
"ref.trigger" => Var(values= [missing, missing, true, missing, true, true],
variability="trigger"),
"motor.w_c" => Var(values= [0.8, missing, missing, 1.5, missing, missing],
variability="clocked", clock="ref.clock"),
"motor.inertia"=> Par(value = 0.02f0, unit="kg*m/s^2"),
"motor.data" => Par(value = "resources/motorMap.json"),
"attributes" => Map(experiment=Map(stoptime=0.5, interval=0.01))
)
# Abstract Signal Tables Interface
phi_m_sig = getSignal( sigTable, "motor.angle") # = Var(values=..., unit=..., ...)
phi_m = getValuesWithUnit(sigTable, "motor.angle") # = [0.0, 0.0998, 0.1986, ...]u"rad"
w_c = getValues( sigTable, "motor.w_c" ) # = [0.8, missing, missing, 1.5, ...]
inertia = getValueWithUnit( sigTable, "motor.inertia") # = 0.02u"kg*m/s^2"
motor_w = getValues(sigTable, "motor.w")
wm = getValues(sigTable, "wm")
@test motor_w === wm
showInfo(sigTable)
showInfo(sigTable, showPar=false, showAttributes=false)
end | SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 1022 | module test_SignalTypes
using SignalTables
using SignalTables.Unitful
using SignalTables.Test
@test eltypeOrType([1.0,2.0,3.0]) == Float64
@test eltypeOrType([1.0,missing,3.0]) == Union{Missing,Float64}
@test eltypeOrType("abc") == String
@test eltypeOrType((1,1.0,"abc")) == Tuple{Int64, Float64, String}
s = 2.1u"m/s"
v = [1.0, 2.0, 3.0]u"m/s"
s_unit = unitAsParseableString(s)
v_unit = unitAsParseableString(v)
@test s_unit == "m*s^-1"
@test v_unit == "m*s^-1"
# Check that parsing the unit string works
s_unit2 = uparse(s_unit)
v_unit2 = uparse(s_unit)
mutable struct Data{FloatType <: AbstractFloat}
velocity::quantity(FloatType, u"m/s")
end
v = Data{Float64}(2.0u"mm/s")
@show v # v = Data{Float64}(0.002 m s^-1)
sig = Vector{Union{Missing,quantity(Float64,u"m/s")}}(missing,3)
append!(sig, [1.0, 2.0, 3.0]u"m/s")
append!(sig, fill(missing, 2))
@show sig # Union{Missing, Unitful.Quantity{xxx}}[missing, missing, missing, 1.0 m s^-1, 2.0 m s^-1, 3.0 m s^-1, missing, missing]
end | SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | code | 2268 | module test_json
using SignalTables
println("\n... Write signal table in json format to file.")
t = 0.0:0.1:0.5
signalTable1 = SignalTable(
"time" => Var(values= t, unit="s", independent=true),
"load.r" => Var(values= [sin.(t) cos.(t) sin.(t)], unit="m"),
"motor.angle" => Var(values= sin.(t), unit="rad", state=true, der="motor.w"),
"motor.w" => Var(values= cos.(t), unit="rad/s"),
"motor.w_ref" => Var(values= 0.9*[sin.(t) cos.(t)], unit = ["rad", "1/s"],
info="Reference angle and speed"),
"wm" => Var(alias = "motor.w"),
"ref.clock" => Var(values= [true, missing, missing, true, missing, missing],
variability="clock"),
"ref.trigger" => Var(values= [missing, missing, true, missing, true, true],
variability="trigger"),
"motor.w_c" => Var(values= [0.8, missing, missing, 1.5, missing, missing],
variability="clocked", clock="ref.clock"),
"motor.inertia"=> Par(value = 0.02f0, unit="kg*m/s^2"),
"motor.data" => Par(value = "resources/motorMap.json"),
"attributes" => Map(info = "This is a test signal table")
)
writeSignalTable("test_json_signalTable1.json", signalTable1, log=true, indent=2)
t = 0.0:0.1:10.0
tc = [rem(i,5) == 0 ? div(i,5)+1 : missing for i in 0:length(t)-1]
sigTable2 = SignalTable(
"_attributes" => Map(experiment=Map(stopTime=10.0, interval=0.1)),
"time" => Var(values = t, unit="s", independent=true),
"motor.angle" => Var(values = sin.(t), unit="rad", der="motor.w"),
"motor.w" => Var(values = cos.(t), unit="rad/s"),
"motor.w_ref" => Var(values = 0.9*cos.(t), unit="rad/s"),
"baseClock" => Var(values = tc, variability="clock"),
"motor.w_c" => Var(values = 1.2*cos.((tc.-1)/2), unit="rad/s",
variability="clocked", clock="baseClock"),
"motor.file" => Par(value = "motormap.json",
info = "File name of motor characteristics")
)
showInfo(sigTable2)
@usingPlotPackage
plot(sigTable2, ("motor.w", "motor.w_c"), figure=2)
plot(sigTable2, "motor.w_c", xAxis="baseClock", figure=3)
writeSignalTable("sigTable2.json", sigTable2, log=true, indent=2)
end | SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | docs | 8775 | # SignalTables
[](https://modiasim.github.io/SignalTables.jl/stable/index.html)
[](https://github.com/ModiaSim/SignalTables.jl/blob/master/LICENSE)
Package [SignalTables](https://github.com/ModiaSim/SignalTables.jl) (see [docu](https://modiasim.github.io/SignalTables.jl/stable/index.html))
provides abstract and concrete types and functions for *signal tables*.
A *signal table* is basically a table where the table columns can be multi-dimensional arrays with attributes.
Typically, simulation results, reference signals, table-based input signals, measurement data,
look-up tables can be represented by a signal table.
A *signal table* is an *ordered dictionary* of *signals* with string keys. A *signal* can be defined in the following forms:
- As [Var](https://modiasim.github.io/SignalTables.jl/stable/Functions/Signals.html#SignalTables.Var) *dictionary* that has a required *values* key
(or an *alias* key) representing a *signal array* of any element type as function of the independent signal(s) (or is the k-th independent signal). A *signal array* is a *multi-dimensional array* with indices `[i1,i2,...,j1,j2,...]` to hold variable elements `[j1,j2,...]` at the `[i1,i2,...]` independent signal(s). If an element of a signal array is *not defined*, it has a value of *missing*.
- As [Par](https://modiasim.github.io/SignalTables.jl/stable/Functions/Signals.html#SignalTables.Par) *dictionary* that has a required *value* key (or and *alias* key) representing a constant of any type.
- As [Map](https://modiasim.github.io/SignalTables.jl/stable/Functions/Signals.html#SignalTables.Map) *dictionary* that has no required keys and collects attributes/meta-data that are associated with a Var, Par, Map, or signal table dictionary.
In all these dictionaries, additional attributes can be stored, for example *unit*, *info*, *variability* (continuous, clocked, ...), *interpolation*,
*extrapolation*, and user-defined attributes.
This logical view is directly mapped to Julia data structures, but can be also mapped to data structures in other
programming languages. It is then possible to use existing textual or binary persistent serialization formats
(JSON, HDF5, BSON, MessagePack, ...) to store a signal table in these formats on file. Furthermore, a subset of a signal table
can also be stored in traditional tables (Excel, CSV, pandas, DataFrames.jl, ...) by *flattening* the multi-dimensional arrays and
not storing constants and attributes.
## Examples
```julia
using SignalTables
t = 0.0:0.1:0.5
sigTable = SignalTable(
"time" => Var(values= t, unit="s", independent=true),
"load.r" => Var(values= [sin.(t) cos.(t) sin.(t)], unit="m"),
"motor.angle" => Var(values= sin.(t), unit="rad", state=true, der="motor.w"),
"motor.w" => Var(values= cos.(t), unit="rad/s"),
"motor.w_ref" => Var(values= 0.9*[sin.(t) cos.(t)], unit = ["rad", "1/s"],
info="Reference angle and speed"),
"wm" => Var(alias = "motor.w"),
"ref.clock" => Var(values= [true, missing, missing, true, missing, missing],
variability="clock"),
"motor.w_c" => Var(values= [0.8, missing, missing, 1.5, missing, missing],
variability="clocked", clock="ref.clock"),
"motor.inertia"=> Par(value = 0.02f0, unit="kg*m/s^2"),
"motor.data" => Par(value = "resources/motorMap.json"),
"attributes" => Map(experiment=Map(stoptime=0.5, interval=0.01))
)
phi_m_sig = getSignal( sigTable, "motor.angle") # = Var(values=..., unit=..., ...)
phi_m = getValuesWithUnit(sigTable, "motor.angle") # = [0.0, 0.0998, 0.1986, ...]u"rad"
w_c = getValues( sigTable, "motor.w_c" ) # = [0.8, missing, missing, 1.5, ...]
inertia = getValueWithUnit( sigTable, "motor.inertia") # = 0.02u"kg*m/s^2"
getValues(sigTable, "motor.w") === getValues(sigTable, "wm")
showInfo(sigTable)
```
Command `showInfo` generates the following output:
```julia
name unit size eltypeOrType kind attributes
───────────────────────────────────────────────────────────────────────────────────────────────────────
time "s" [6] Float64 Var independent=true
load.r "m" [6,3] Float64 Var
motor.angle "rad" [6] Float64 Var state=true, der="motor.w"
motor.w "rad/s" [6] Float64 Var
motor.w_ref ["rad", "1/s"] [6,2] Float64 Var info="Reference angle and speed"
wm "rad/s" [6] Float64 Var alias="motor.w"
ref.clock [6] Union{Missing,Bool} Var variability="clock"
motor.w_c [6] Union{Missing,Float64} Var variability="clocked", clock="ref.clock"
motor.inertia "kg*m/s^2" Float32 Par
motor.data String Par
attributes Map experiment=Map(stoptime=0.5, interval=0.01)
```
The various Julia FileIO functions can be directly used to save a signal table
in various formats, e.g. JSON or HDF5 (see [FileIO Examples](https://modiasim.github.io/SignalTables.jl/stable/Examples/FileIO.html),
[json file of sigTable above](docs/resources/examples/fileIO/VariousTypes_prettyPrint.json) ).
```julia
using SignalTable
usePlotPackage("PyPlot") # or ENV["SignalTablesPlotPackage"] = "PyPlot"
sigTable = getSignalTableExample("MissingValues")
@usingPlotPackage # = using SignalTablesInterface_PyPlot
plot(sigTable, [("sigC", "load.r[2:3]"), ("sigB", "sigD")]) # generate plots
```
generate the following plot:
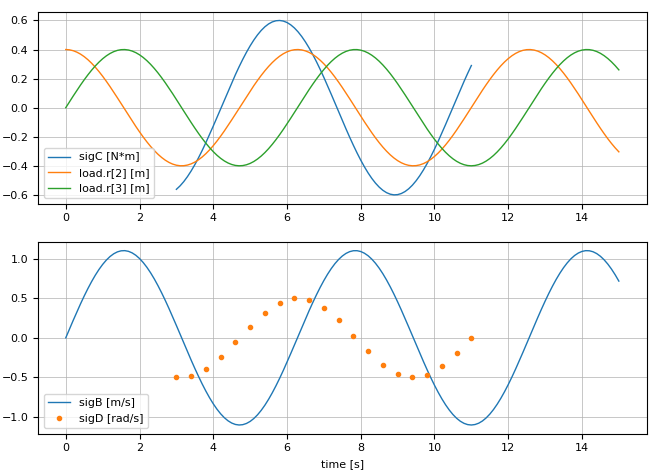
*Concrete implementations* of the [Abstract Signal Table Interface](https://modiasim.github.io/SignalTables.jl/stable/Internal/AbstractSignalTableInterface.html) are provided for:
- [`SignalTable`](https://modiasim.github.io/SignalTables.jl/stable/Functions/SignalTables.html#SignalTables.SignalTable) (included in SignalTables.jl).
- [Modia.jl](https://github.com/ModiaSim/Modia.jl) (a modeling and simulation environment; version >= 0.9.0)
- [DataFrames.jl](https://github.com/JuliaData/DataFrames.jl)
(tabular data; first column is independent variable; *only scalar variables*))
- [Tables.jl](https://github.com/JuliaData/Tables.jl)
(abstract tables, e.g. [CSV](https://github.com/JuliaData/CSV.jl) tables;
first column is independent variable; *only scalar variables*).
*Concrete implementations* of the [Abstract Plot Interface](https://modiasim.github.io/SignalTables.jl/stable/Internal/AbstractPlotInterface.html) are provided for:
- [PyPlot](https://github.com/JuliaPy/PyPlot.jl) (plots with [Matplotlib](https://matplotlib.org/stable/) from Python;
via [SignalTablesInterface_PyPlot.jl](https://github.com/ModiaSim/SignalTablesInterface_PyPlot.jl)),
- [GLMakie](https://github.com/JuliaPlots/GLMakie.jl) (interactive plots in an OpenGL window;
via [SignalTablesInterface_GLMakie.jl](https://github.com/ModiaSim/SignalTablesInterface_GLMakie.jl)),
- [WGLMakie](https://github.com/JuliaPlots/WGLMakie.jl) (interactive plots in a browser window;
via [SignalTablesInterface_WGLMakie.jl](https://github.com/ModiaSim/SignalTablesInterface_WGLMakie.jl)),
- [CairoMakie](https://github.com/JuliaPlots/CairoMakie.jl) (static plots on file with publication quality;
via [SignalTablesInterface_CairoMakie.jl](https://github.com/ModiaSim/SignalTablesInterface_CairoMakie.jl)).
Furthermore, there is a dummy implementation included in SignalTables that is useful when performing tests with runtests.jl,
in order that no plot package needs to be loaded during the tests:
- SilentNoPlot (= all plot calls are silently ignored).
## Installation
```julia
julia> ]add SignalTables
add SignalTablesInterface_PyPlot # if plotting with PyPlot desired
add SignalTablesInterface_GLMakie # if plotting with GLMakie desired
add SignalTablesInterface_WGLMakie # if plotting with WGLMakie desired
add SignalTablesInterface_CairoMakie # if plotting with CairoMakie desired
```
If you have trouble installing `SignalTablesInterface_PyPlot`, see
[Installation of PyPlot.jl](https://modiasim.github.io/SignalTables.jl/stable/index.html#Installation-of-PyPlot.jl)
## Main developer
[Martin Otter](https://rmc.dlr.de/sr/en/staff/martin.otter/),
[DLR - Institute of System Dynamics and Control](https://www.dlr.de/sr/en) | SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | docs | 13185 | # SignalTables Documentation
```@meta
CurrentModule = SignalTables
```
## Overview
Package [SignalTables](https://github.com/ModiaSim/SignalTables.jl)
provides abstract and concrete types and functions for *signal tables*.
A *signal table* is basically a table where the table columns can be multi-dimensional arrays with attributes.
Typically, simulation results, reference signals, table-based input signals, measurement data,
look-up tables can be represented by a signal table.
A *signal table* is an *ordered dictionary* of *signals* with string keys. A *signal* can be defined in the following forms:
- As [Var](https://modiasim.github.io/SignalTables.jl/stable/Functions/Signals.html#SignalTables.Var) *dictionary* that has a required *values* key (or an *alias* key) representing a *signal array* of any element type as function of the independent signal(s), or is the k-th independent signal. A *signal array* is a *multi-dimensional array* with indices `[i1,i2,...,j1,j2,...]` to hold variable elements `[j1,j2,...]` at the `[i1,i2,...]` independent signal(s). If an element of a signal array is *not defined*, it has a value of *missing*.
- As [Par](https://modiasim.github.io/SignalTables.jl/stable/Functions/Signals.html#SignalTables.Par) *dictionary* that has a required *value* key (or and *alias* key) representing a constant of any type.
- As [Map](https://modiasim.github.io/SignalTables.jl/stable/Functions/Signals.html#SignalTables.Map) *dictionary* that has no required keys and collects attributes/meta-data that are associated with a Var, Par, Map, or signal table dictionary.
In all these dictionaries, additional attributes can be stored, for example *unit*, *info*, *variability* (continuous, clocked, ...), *interpolation*,
*extrapolation*, and user-defined attributes.
## Examples
```julia
using SignalTablesact
t = 0.0:0.1:0.5
sigTable = SignalTable(
"time" => Var(values= t, unit="s", independent=true),
"load.r" => Var(values= [sin.(t) cos.(t) sin.(t)], unit="m"),
"motor.angle" => Var(values= sin.(t), unit="rad", state=true, der="motor.w"),
"motor.w" => Var(values= cos.(t), unit="rad/s"),
"motor.w_ref" => Var(values= 0.9*[sin.(t) cos.(t)], unit = ["rad", "1/s"],
info="Reference angle and speed"),
"wm" => Var(alias = "motor.w"),
"ref.clock" => Var(values= [true, missing, missing, true, missing, missing],
variability="clock"),
"motor.w_c" => Var(values= [0.8, missing, missing, 1.5, missing, missing],
variability="clocked", clock="ref.clock"),
"motor.inertia"=> Par(value = 0.02f0, unit="kg*m/s^2"),
"motor.data" => Par(value = "resources/motorMap.json"),
"attributes" => Map(experiment=Map(stoptime=0.5, interval=0.01))
)
phi_m_sig = getSignal( sigTable, "motor.angle") # = Var(values=..., unit=..., ...)
phi_m = getValuesWithUnit(sigTable, "motor.angle") # = [0.0, 0.0998, 0.1986, ...]u"rad"
w_c = getValues( sigTable, "motor.w_c" ) # = [0.8, missing, missing, 1.5, ...]
inertia = getValueWithUnit( sigTable, "motor.inertia") # = 0.02u"kg*m/s^2"
getValues(sigTable, "motor.w") === getValues(sigTable, "wm")
showInfo(sigTable)
```
Command `showInfo` generates the following output:
```julia
name unit size eltypeOrType kind attributes
───────────────────────────────────────────────────────────────────────────────────────────────────────
time "s" [6] Float64 Var independent=true
load.r "m" [6,3] Float64 Var
motor.angle "rad" [6] Float64 Var state=true, der="motor.w"
motor.w "rad/s" [6] Float64 Var
motor.w_ref ["rad", "1/s"] [6,2] Float64 Var info="Reference angle and speed"
wm "rad/s" [6] Float64 Var alias="motor.w"
ref.clock [6] Union{Missing,Bool} Var variability="clock"
motor.w_c [6] Union{Missing,Float64} Var variability="clocked", clock="ref.clock"
motor.inertia "kg*m/s^2" Float32 Par
motor.data String Par
attributes Map experiment=Map(stoptime=0.5, interval=0.01)
```
The various Julia FileIO functions can be directly used to save a signal table
in various formats, e.g. JSON or HDF5 (see [FileIO Examples](@ref), [json file of sigTable above](../resources/examples/fileIO/VariousTypes_prettyPrint.json) ).
The commands
```julia
using SignalTable
usePlotPackage("PyPlot") # or ENV["SignalTablesPlotPackage"] = "PyPlot"
sigTable = getSignalTableExample("MissingValues")
@usingPlotPackage # = using SignalTablesInterface_PyPlot
plot(sigTable, [("sigC", "load.r[2:3]"), ("sigB", "sigD")])
```
generate the following plot:

## Abstract Interfaces
*Concrete implementations* of the [Abstract Signal Table Interface](@ref) are provided for:
- [`SignalTable`](@ref) (included in SignalTables.jl).
- [Modia.jl](https://github.com/ModiaSim/Modia.jl) (a modeling and simulation environment; version >= 0.9.0)
- [DataFrames.jl](https://github.com/JuliaData/DataFrames.jl)
(tabular data; first column is independent variable; *only scalar variables*))
- [Tables.jl](https://github.com/JuliaData/Tables.jl)
(abstract tables, e.g. [CSV](https://github.com/JuliaData/CSV.jl) tables;
first column is independent variable; *only scalar variables*).
*Concrete implementations* of the [Abstract Plot Interface](@ref) are provided for:
- [PyPlot](https://github.com/JuliaPy/PyPlot.jl) (plots with [Matplotlib](https://matplotlib.org/stable/) from Python;
via [SignalTablesInterface_PyPlot.jl](https://github.com/ModiaSim/SignalTablesInterface_PyPlot.jl)),
- [GLMakie](https://github.com/JuliaPlots/GLMakie.jl) (interactive plots in an OpenGL window;
via [SignalTablesInterface_GLMakie.jl](https://github.com/ModiaSim/SignalTablesInterface_GLMakie.jl)),
- [WGLMakie](https://github.com/JuliaPlots/WGLMakie.jl) (interactive plots in a browser window;
via [SignalTablesInterface_WGLMakie.jl](https://github.com/ModiaSim/SignalTablesInterface_WGLMakie.jl)),
- [CairoMakie](https://github.com/JuliaPlots/CairoMakie.jl) (static plots on file with publication quality;
via [SignalTablesInterface_CairoMakie.jl](https://github.com/ModiaSim/SignalTablesInterface_CairoMakie.jl)).
Furthermore, there is a dummy implementation included in SignalTables.jl that is useful when performing tests with runtests.jl,
in order that no plot package needs to be loaded during the tests:
- SilentNoPlot (= all plot calls are silently ignored).
## Installation
```julia
julia> ]add SignalTables
add SignalTablesInterface_PyPlot # if plotting with PyPlot desired
# once registration processs finished
add SignalTablesInterface_GLMakie # if plotting with GLMakie desired
add SignalTablesInterface_WGLMakie # if plotting with WGLMakie desired
add SignalTablesInterface_CairoMakie # if plotting with CairoMakie desired
```
If you have trouble installing `SignalTablesInterface_PyPlot`, see
[Installation of PyPlot.jl](https://modiasim.github.io/SignalTables.jl/stable/index.html#Installation-of-PyPlot.jl)
## Installation of PyPlot.jl
`SignalTablesInterface_PyPlot.jl` uses `PyPlot.jl` which in turn uses Python.
Therefore a Python installation is needed. Installation
might give problems in some cases. Here are some hints what to do
(you may also consult the documentation of [PyPlot.jl](https://github.com/JuliaPy/PyPlot.jl)).
Before installing `SignalTablesInterface_PyPlot.jl` make sure that `PyPlot.jl` is working:
```julia
]add PyPlot
using PyPlot
t = [0,1,2,3,4]
plot(t,2*t)
```
If the commands above give a plot window. Everything is fine.
If you get errors or no plot window appears or Julia crashes,
try to first install a standard Python installation from Julia:
```julia
# Start a new Julia session
ENV["PYTHON"] = "" # Let Julia install Python
]build PyCall
exit() # Exit Juila
# Start a new Julia session
]add PyPlot
using PyPlot
t = [0,1,2,3,4]
plot(t,2*t)
```
If the above does not work, or you want to use another Python distribution,
install a [Python 3.x distribution](https://wiki.python.org/moin/PythonDistributions) that contains Matplotlib,
set `ENV["PYTHON"] = "<path-above-python-installation>/python.exe"` and follow the steps above.
Note, `SignalTablesInterface_PyPlot` is based on the Python 3.x version of Matplotlib where some keywords
are different to the Python 2.x version.
## Release Notes
### Version 0.4.4
- Adapted to GLMakie 0.8 (`textsize` replaced by `fontsize` in src/makie.jl)
### Version 0.4.3
- Minor improvements when printing a SignalTable.
### Version 0.4.2
- Fix issue [#6](https://github.com/ModiaSim/SignalTables.jl/issues/6):
signalTableToDataFrame(..) is now working if the first signal is not a Var(..).
- Minor improvement in JSON generation.
### Version 0.4.1
- getSignalNames(signalTable; getVar=true, getPar=true, getMap=true): New keyword arguments
getVar, getPar, getMap to only return names of the specified signal categories.
- writeSignalTable(...): Some issues corrected.
- @error replaced by error(..).
### Version 0.4.0
- New signal-type Map added (additionally to Var und Par signals) with two new functions Map(..), isMap(..).
- Output of showInfo(..) improved.
- Non-backwards compatible changes: Function showInfo(..) has optional keywords arguments
showVar, showPar, showMap, showAttributes, instead of the previous Var, Par, attributes.
### Version 0.3.5
- @usingPlotPackage(): If SilentNoPlot selected, use "using SignalTables.SilentNoPlot" instead of "import SignalTables.SilentNoPlot: plot ..:".
- writeSignalTable(..): Arrays get an additional key `layout = "column-major"` to clearly define that storage is in column-major order.
Furthermore, if a signal has an *alias* key, then the *values* or *value* array is not stored on file.
**Bug fixes**
- writeSignalTable(..): If arrays or numbers have Unitful units, these units are stripped off and provided via key `unit` as a string.
### Version 0.3.4
- Bug fix in usePreviousPlotPackage()
### Version 0.3.3
- Bug fix: getValuesWithUnit(..) is now correctly returning the values vector, if no unit is defined.
### Version 0.3.2
- Add makie.jl to be used by Makie backends.
- For backwards compatibilty to ModiaResult, also accept ENV["MODIA_PLOT_PACKAGE"] instead of ENV["SignalTablesPlotPackage"]
to define plot package - at all places (some parts have been missing).
### Version 0.3.1
- writeSignalTable(..): Do not store elements, that cannot be mapped to JSON + add _classVersion to signal table on file.
- For backwards compatibilty to ModiaResult, also accept ENV["MODIA_PLOT_PACKAGE"] instead of ENV["SignalTablesPlotPackage"]
to define plot package.
### Version 0.3.0
- Slightly non-backwards compatible to 0.2.0.
- Various new functions (e.g. storing a signal table in JSON format on file).
- DataFrames.jl, Tables.jl are supported as signal tables.
- Plotting/flattening: Support of Measurements.jl and MonteCarloMeasurements.jl
- Docu improved.
- Bug with PlotPackage "SilentNoPlot" fixed.
- `SignalTables/test/runtests.jl` runs the tests with plot package *"SilentNoPlot"* (instead of the activated plot package).
- New file `SignalTables/test/runtests_with_plot.jl` runs the tests with the activated plot package.
### Version 0.2.0
Version, based on [ModiaResult.jl](https://github.com/ModiaSim/ModiaResult.jl).
Changes with respect to ModiaResult.jl:
Underlying data format made much simpler, more general and more useful:
- Dictionary of *multi-dimensional arrays* as function of one or more independent variables
with potentially *missing values*.
- Also parameters can be stored in the dictionary and are supported, e.g., for plotting.
- Variables and parameters are dictionaries that store the actual values (e.g. arrays), and additional attributes.
- Values are stored without units and the units are provided via the additional string attribute `:unit`. A unit can be
either hold for all elements of an array, or an array of units can be provided defining the units for all variable elements.
- A new function to *flatten* and convert a signal array for use in plots or traditional tables.
- Since signals are arrays, all the Julia array operations can be directly used,
e.g. for post-processing of simulation results.
- write/save on JSON and JDL (HDF5) files.
Furthermore
- Documentation considerably improved and made more user-oriented.
- The Abstract Interfaces defined more clearly.
- Several annoying bugs of ModiaResult.jl are no longer present.
### Version 0.1.0
Initial version used for registration.
## Main developer
[Martin Otter](https://rmc.dlr.de/sr/en/staff/martin.otter/),
[DLR - Institute of System Dynamics and Control](https://www.dlr.de/sr/en)
| SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | docs | 3862 | # FileIO Examples
```@meta
CurrentModule = SignalTables
```
## JSON - Write to File
```julia
using SignalTables
sigTable = getSignalTableExample("VariousTypes")
writeSignalTable("VariousTypes_prettyPrint.json", sigTable; indent=2, log=true)
writeSignalTable("VariousTypes_compact.json" , sigTable)
```
results in the following files
- [VariousTypes_prettyPrint.json](../../resources/examples/fileIO/VariousTypes_prettyPrint.json).
- [VariousTypes_compact.json](../../resources/examples/fileIO/VariousTypes_compact.json).
## JSON - Write to String
```julia
using SignalTables
str = signalTableToJSON( getSignalTableExample("VariousTypes") )
println(str)
```
results in the following print output
```julia
"{\"_class\":\"SignalTable\",\"time\":{\"_class\":\"Var\",\"values\":[0.0,0.1,0.2,0.3,0.4,0.5],\"unit\":\"s\",\"independent\":true},\"load.r\":{\"_class\":\"Var\",\"values\":{\"_class\":\"Array\",\"eltype\":\"Float64\",\"size\":[6,3],\"values\":[0.0,0.09983341664682815,0.19866933079506122,0.29552020666133955,0.3894183423086505,0.479425538604203,1.0,0.9950041652780258,0.9800665778412416,0.955336489125606,0.9210609940028851,0.8775825618903728,0.0,0.09983341664682815,0.19866933079506122,0.29552020666133955,0.3894183423086505,0.479425538604203]},\"unit\":\"m\"},\"motor.angle\":{\"_class\":\"Var\",\"values\":[0.0,0.09983341664682815,0.19866933079506122,0.29552020666133955,0.3894183423086505,0" ⋯ 533 bytes ⋯ ",\"info\":\"Reference angle and speed\"},\"wm\":{\"_class\":\"Var\",\"values\":[1.0,0.9950041652780258,0.9800665778412416,0.955336489125606,0.9210609940028851,0.8775825618903728],\"unit\":\"rad/s\",\"alias\":\"motor.w\"},\"ref.clock\":{\"_class\":\"Var\",\"values\":[true,null,null,true,null,null],\"variability\":\"clock\"},\"motor.w_c\":{\"_class\":\"Var\",\"values\":[0.6,null,null,0.8,null,null],\"variability\":\"clocked\",\"clock\":\"ref.clock\"},\"motor.inertia\":{\"_class\":\"Par\",\"value\":{\"_class\":\"Number\",\"type\":\"Float32\",\"value\":0.02},\"unit\":\"kg*m/s^2\"},\"motor.data\":{\"_class\":\"Par\",\"value\":\"resources/motorMap.json\"},\"attributes\":{\"_class\":\"Par\",\"info\":\"This is a test signal table\"}}"
```
Such a string could be communicated to a web browser.
## JLD (HDF5) - Write to File
[JLD](https://github.com/JuliaIO/JLD.jl) stores Julia objects in HDF5 format, hereby additional attributes
are stored to preserve type information.
```julia
using SignalTables
using FileIO
sigTable = getSignalTableExample("VariousTypes")
save( File(format"JLD", "VariousTypes.jld"), sigTable)
```
results in the following file:
- [VariousTypes.jld](../../resources/examples/fileIO/VariousTypes.jld).
## CSV - Read from File
All Julia tables that are derived from [Tables.jl](https://github.com/JuliaData/Tables.jl) are seen as signal tables.
For example, a CSV Files is read from file and treated as signal Table:
```julia
using SignalTables
import CSV
file = joinpath(SignalTables.path, "examples", "fileIO", "Rotational_First.csv")
println("\n... Read csv file \"$file\"")
sigTable = CSV.File(file)
println("\n... Show csv file as signal table")
showInfo(sigTable)
println("\ntime[1:10] = ", getSignal(sigTable, "time")[:values][1:10])
```
results in the following output:
```julia
... Read csv file "[...]\SignalTables\examples\fileIO\Rotational_First.csv"
... Show csv file as signal table
name unit size eltypeOrType kind attributes
───────────────────────────────────────────────────────────────
time (2002,) Float64 Var
damper.phi_rel (2002,) Float64 Var
damper.w_rel (2002,) Float64 Var
inertia3.phi (2002,) Float64 Var
inertia3.w (2002,) Float64 Var
time[1:10] = [0.0, 0.0005, 0.001, 0.0015, 0.002, 0.0025, 0.003, 0.0035, 0.004, 0.0045000000000000005]
``` | SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | docs | 9835 | # Plot Examples
```@meta
CurrentModule = SignalTables
```
## OneScalarSignal
```julia
using SignalTables
@usingPlotPackage
t = range(0.0, stop=10.0, length=100)
sigTable = SignalTable(
"time" => Var(values = t, independent=true),
"phi" => Var(values = sin.(t))
)
showInfo(sigTable)
plot(sigTable, "phi", heading="sine(time)")
```
results in:
```julia
name unit size eltypeOrType kind attributes
──────────────────────────────────────────────────────────
time (100,) Float64 Var independent=true
phi (100,) Float64 Var
```

## OneScalarSignalWithUnit
```julia
using SignalTables
@usingPlotPackage
t = range(0.0, stop=10.0, length=100)
sigTable = SignalTable(
"time" => Var(values = t, unit="s", independent=true),
"phi" => Var(values = sin.(t), unit="rad")
)
showInfo(sigTable)
plot(sigTable, "phi", heading="sine(time)")
```
results in:
```julia
name unit size eltypeOrType kind attributes
───────────────────────────────────────────────────────────
time "s" (100,) Float64 Var independent=true
phi "rad" (100,) Float64 Var
```

## OneVectorSignalWithUnit
```julia
using SignalTables
@usingPlotPackage
t = range(0.0, stop=10.0, length=100)
sigTable = SignalTable(
"time" => Var(values = t, unit="s", independent=true),
"r" => Var(values = [0.4*cos.(t) 0.5*sin.(t) 0.3*cos.(t)], unit="m"),
)
showInfo(sigTable)
plot(sigTable, "phi", heading="sine(time)")
```
results in:
```julia
name unit size eltypeOrType kind attributes
───────────────────────────────────────────────────────────
time "s" (100,) Float64 Var independent=true
r "m" (100,3) Float64 Var
```

## OneMatrixSignal
```julia
using SignalTables
@usingPlotPackage
t = range(0.0, stop=1.0, length=10)
offset = Float64[11 12 13;
21 22 23]
matrix = Array{Float64,3}(undef,length(t),2,3)
for i = 1:length(t), j = 1:2, k=1:3
matrix[i,j,k] = offset[j,k] + 0.3*sin(t[i])
end
sigTable = SignalTable(
"time" => Var(values = t, independent=true),
"matrix" => Var(values = matrix)
)
showInfo(sigTable)
plot(sigTable, "phi", heading="sine(time)")
```
results in:
```julia
name unit size eltypeOrType kind attributes
──────────────────────────────────────────────────────────────
time (10,) Float64 Var independent=true
matrix (10,2,3) Float64 Var
```

## OneMatrixSignalWithMatrixUnits
```julia
using SignalTables
@usingPlotPackage
t = range(0.0, stop=1.0, length=10)
offset = Float64[11 12 13;
21 22 23]
matrix = Array{Float64,3}(undef,length(t),2,3)
for i = 1:length(t), j = 1:2, k=1:3
matrix[i,j,k] = offset[j,k] + 0.3*sin(t[i])
end
sigTable = SignalTable(
"time" => Var(values = t, unit="s", independent=true),
"matrix" => Var(values = matrix, unit=["m" "m/s" "m/s^2";
"rad" "rad/s" "rad/s^2"])
)
showInfo(sigTable)
plot(sigTable, "phi", heading="sine(time)")
```
results in:
```julia
name unit size eltypeOrType kind attributes
──────────────────────────────────────────────────────────────────────────────────────────────────────
time "s" (10,) Float64 Var independent=true
matrix ["m" "m/s" "m/s^2"; "rad" "rad/s" "rad/s^2"] (10,2,3) Float64 Var
```

## ConstantSignals
```julia
using SignalTables
@usingPlotPackage
t = range(0.0, stop=1.0, length=5)
matrix = Float64[11 12 13;
21 22 23]
sigTable = SignalTable(
"time" => Var(values = t, unit="s", independent=true),
"phi_max" => Par(value = 1.1f0, unit="rad"),
"i_max" => Par(value = 2),
"open" => Par(value = true),
"file" => Par(value = "filename.txt"),
"matrix1" => Par(value = matrix),
"matrix2" => Par(alias = "matrix1", unit="m/s"),
"matrix3" => Par(alias = "matrix1", unit=["m" "m/s" "m/s^2";
"rad" "rad/s" "rad/s^2"])
)
showInfo(sigTable)
plot(sigTable, "phi", heading="sine(time)")
```
results in:
```julia
name unit size eltypeOrType kind attributes
────────────────────────────────────────────────────────────────────────────────────────────────────
time "s" (5,) Float64 Var independent=true
phi_max "rad" () Float32 Par
i_max () Int64 Par
open () Bool Par
file String Par
matrix1 (2,3) Float64 Par
matrix2 "m/s" (2,3) Float64 Par alias="matrix1"
matrix3 ["m" "m/s" "m/s^2"; "rad" "rad/s" "rad/s^2"] (2,3) Float64 Par alias="matrix1"
```

# MissingValues
```julia
using SignalTables
@usingPlotPackage
time1 = 0.0 : 0.1 : 3.0
time2 = 3.0 : 0.1 : 11.0
time3 = 11.0 : 0.1 : 15
t = vcat(time1,time2,time3)
sigC = vcat(fill(missing,length(time1)), 0.6*cos.(time2.+0.5), fill(missing,length(time3)))
function sigD(t, time1, time2)
sig = Vector{Union{Missing,Float64}}(undef, length(t))
j = 1
for i = length(time1)+1:length(time1)+length(time2)
if j == 1
sig[i] = 0.5*cos(t[i])
end
j = j > 3 ? 1 : j+1
end
return sig
end
sigTable = SignalTable(
"time" => Var(values=t, unit="s", independent=true),
"load.r" => Var(values=0.4*[sin.(t) cos.(t) sin.(t)], unit="m"),
"sigA" => Var(values=0.5*sin.(t), unit="m"),
"sigB" => Var(values=1.1*sin.(t), unit="m/s"),
"sigC" => Var(values=sigC, unit="N*m"),
"sigD" => Var(values=sigD(t, time1, time2), unit="rad/s", variability="clocked", info="Motor angular velocity")
)
showInfo(sigTable)
plot(sigTable, [("sigC", "load.r[2:3]"), ("sigB", "sigD")])
```
results in:
```julia
name unit size eltypeOrType kind attributes
─────────────────────────────────────────────────────────────────────────────────────────────────────────────
time "s" (153,) Float64 Var independent=true
load.r "m" (153,3) Float64 Var
sigA "m" (153,) Float64 Var
sigB "m/s" (153,) Float64 Var
sigC "N*m" (153,) Union{Missing,Float64} Var
sigD "rad/s" (153,) Union{Missing,Float64} Var variability="clocked", info="Motor angular velocit…
```

# VariousTypes
```julia
using SignalTables
@usingPlotPackage
t = 0.0:0.1:0.5
sigTable = SignalTable(
"time" => Var(values= t, unit="s", independent=true),
"load.r" => Var(values= [sin.(t) cos.(t) sin.(t)], unit="m"),
"motor.angle" => Var(values= sin.(t), unit="rad", state=true),
"motor.w" => Var(values= cos.(t), unit="rad/s", integral="motor.angle"),
"motor.w_ref" => Var(values= 0.9*[sin.(t) cos.(t)], unit = ["rad", "1/s"],
info="Reference angle and speed"),
"wm" => Var(alias = "motor.w"),
"ref.clock" => Var(values= [true, missing, missing, true, missing, missing],
variability="clock"),
"motor.w_c" => Var(values= [0.6, missing, missing, 0.8, missing, missing],
variability="clocked", clock="ref.clock"),
"motor.inertia" => Par(value = 0.02f0, unit="kg*m/s^2"),
"motor.data" => Par(value = "resources/motorMap.json"),
"attributes" => Par(info = "This is a test signal table")
)
showInfo(sigTable)
plot(sigTable, ["load.r", ("motor.w", "wm", "motor.w_c", "ref.clock")], heading="VariousTypes")
```
results in:
```julia
name unit size eltypeOrType kind attributes
──────────────────────────────────────────────────────────────────────────────────────────────────────────────
time "s" (6,) Float64 Var independent=true
load.r "m" (6,3) Float64 Var
motor.angle "rad" (6,) Float64 Var state=true, der="motor.w"
motor.w "rad/s" (6,) Float64 Var
motor.w_ref ["rad", "1/s"] (6,2) Float64 Var info="Reference angle and speed"
wm "rad/s" (6,) Float64 Var alias="motor.w"
ref.clock (6,) Union{Missing,Bool} Var variability="clock"
motor.w_c (6,) Union{Missing,Float64} Var variability="clocked", clock="ref.clock"
motor.inertia "kg*m/s^2" () Float32 Par
motor.data String Par
attributes Par info="This is a test signal table"
```

| SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | docs | 6737 | # Overview of Functions
```@meta
CurrentModule = SignalTables
```
This chapter documents functions that operate on signals and on signal tables
A *signal table* is an *ordered dictionary* of *signals* with string keys that supports the
[Abstract Signal Table Interface](@ref). The first k entries
represent the k independent signals. A *signal* is either a
- [`Var`](@ref) dictionary that has a required *:values* key representing a *signal array* of any element type
as function of the independent signal(s) (or is the k-th independent variable), or a
- [`Par`](@ref) dictionary that has an optional *:value* key representing a constant of any type.
A *signal array* has indices `[i1,i2,...,j1,j2,...]` to hold variable elements `[j1,j2,...]`
at the `[i1,i2,...]` independent signal(s). If an element of a signal array is *not defined*
it has a value of *missing*. In both dictionaries, additional attributes can be stored,
for example units, into texts, variability (continuous, clocked, ...), alias.
Note, *FileIO* functions (e.g. JSON, HDF5) can be directly used, see [FileIO Examples](@ref).
| Signal functions | Description |
|:--------------------------------|:-------------------------------------------------------------------------------------------|
| [`Var`](@ref) | Returns a variable signal definition in form of a dictionary. |
| [`Par`](@ref) | Returns a parameter signal definition in form of a dictionary. |
| [`isVar`](@ref) | Returns true, if signal is a [`Var`](@ref). |
| [`isPar`](@ref) | Returns true, if signal is a [`Par`](@ref). |
| [`isMap`](@ref) | Returns true, if signal is a [`Map`](@ref). |
| [`isSignal`](@ref) | Returns true, if signal is a [`Var`](@ref), [`Par`](@ref) or [`Map`](@ref). |
| [`showSignal`](@ref) | Prints a [`Var`](@ref), [`Par`](@ref) or [`Map`](@ref) signal to io. |
| [`eltypeOrType`](@ref) | Returns eltype(..) of AbstractArray or otherwise typeof(..). |
| [`quantity`](@ref) | Returns `Unitful.Quantity` from numberType and numberUnit, e.g. `quantity(Float64,u"m/s")` |
| [`unitAsParseableString`](@ref) | Returns the unit as a String that can be parsed with `Unitful.uparse`, e.g. "m*s^-1" |
| Signal table functions | Description |
|:------------------------------------|:-----------------------------------------------------------------------------------------------|
| [`SignalTable`](@ref) | Returns a new SignalTable dictionary. |
| [`showInfo`](@ref) | Writes info about a signal table to the output stream. |
| [`getIndependentSignalNames`](@ref) | Returns the names of the independent signals. |
| [`getSignalNames`](@ref) | Returns a string vector of the signal names that are present in a signal table. |
| [`hasSignal`](@ref) | Returns `true` if a signal is present in a signal table. |
| [`getSignal`](@ref) | Returns signal from a signal table as [`Var`](@ref), [`Par`](@ref) or [`Map`](@ref). |
| [`getSignalInfo`](@ref) | Returns signal with :\_typeof, :\_size keys instead of :values/:value keys. |
| [`getIndependentSignalsSize`](@ref) | Returns the lengths of the independent signals as Dims. |
| [`getValues`](@ref) | Returns the *values* of a [`Var`](@ref) signal from a signal table. |
| [`getValuesWithUnit`](@ref) | Returns the *values* of a [`Var`](@ref) signal from a signal table including its unit. |
| [`getValue`](@ref) | Returns the *value* of a [`Par`](@ref) signal from a signal table. |
| [`getValueWithUnit`](@ref) | Returns the *value* of a [`Par`](@ref) signal from a signal table including its unit. |
| [`getFlattenedSignal`](@ref) | Returns a copy of a signal where the values or the value are *flattened* and converted for use in plots or traditional tables. |
| [`getDefaultHeading`](@ref) | Returns the default heading for a plot. |
| [`signalTableToJSON`](@ref) | Returns a JSON string representation of a signal table. |
| [`writeSignalTable`](@ref) | Write a signal table in JSON format on file. |
| [`toSignalTable`](@ref) | Returns a signal table as [`SignalTable`](@ref) object. |
| [`signalTableToDataFrame`](@ref) | Returns a signal table as [DataFrame](https://github.com/JuliaData/DataFrames.jl) object. |
| Plot package functions | Description |
|:---------------------------------|:----------------------------------------------------------|
| [`@usingPlotPackage`](@ref) | Expands into `using PlotPackage_<PlotPackageName>` |
| [`usePlotPackage`](@ref) | Define the plot package to be used. |
| [`usePreviousPlotPackage`](@ref) | Define the previously defined plot package to be used. |
| [`currentPlotPackage`](@ref) | Return name defined with [`usePlotPackage`](@ref) |
```@meta
CurrentModule = SignalTablesInterface_PyPlot
```
| Plot functions | Description |
|:--------------------------|:---------------------------------------------------------------|
| [`plot`](@ref) | Plot signals from a signal table in multiple diagrams/figures. |
| [`saveFigure`](@ref) | Save figure in different formats on file. |
| [`closeFigure`](@ref) | Close one figure |
| [`closeAllFigures`](@ref) | Close all figures |
| [`showFigure`](@ref) | Show figure in window (only GLMakie, WGLMakie) | | SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | docs | 2462 | # Plot Packages
```@meta
CurrentModule = SignalTables
```
Example to define the plot package to be used:
```julia
using SignalTables
usePlotPackage("PyPlot") # or ENV["SignalTablesPlotPackage"] = "PyPlot"
```
The following plot packages are supported:
- `"PyPlot"` ([PyPlot](https://github.com/JuliaPy/PyPlot.jl) plots with Matplotlib from Python;
via [SignalTablesInterface_PyPlot.jl](https://github.com/ModiaSim/SignalTablesInterface_PyPlot.jl)),
- `"GLMakie"` ([GLMakie](https://github.com/JuliaPlots/GLMakie.jl) provides interactive plots in an OpenGL window;
via [SignalTablesInterface_GLMakie.jl](https://github.com/ModiaSim/SignalTablesInterface_GLMakie.jl)),
- `"WGLMakie"` ([WGLMakie](https://github.com/JuliaPlots/WGLMakie.jl) provides interactive plots in a browser window;
via [SignalTablesInterface_WGLMakie.jl](https://github.com/ModiaSim/SignalTablesInterface_WGLMakie.jl)),
- `"CairoMakie"` ([CairoMakie](https://github.com/JuliaPlots/CairoMakie.jl) provides static plots on file with publication quality;
via [SignalTablesInterface_CairoMakie.jl](https://github.com/ModiaSim/SignalTablesInterface_CairoMakie.jl)).
- `"SilentNoPlot"` (= all plot calls are silently ignored).
Typically, runtests.jl is defined as:
```julia
using SignalTables
usePlotPackage("SilentNoPlot") # Define Plot Package (previously defined one is put on a stack)
include("include_all.jl") # Include all tests that use a plot package
usePreviousPlotPackage() # Use previously defined Plot package
```
The following functions are provided to define/inquire the current plot package.
!!! note
[SignalTables.jl](https://github.com/ModiaSim/SignalTables.jl) exports all symbols of this table.\
[Modia.jl](https://github.com/ModiaSim/Modia.jl) reexports all symbols.
| Plot package functions | Description |
|:---------------------------------|:----------------------------------------------------------|
| [`@usingPlotPackage`](@ref) | Expands into `using PlotPackage_<PlotPackageName>` |
| [`usePlotPackage`](@ref) | Define the plot package to be used. |
| [`usePreviousPlotPackage`](@ref) | Define the previously defined plot package to be used. |
| [`currentPlotPackage`](@ref) | Return name defined with [`usePlotPackage`](@ref) |
```@docs
@usingPlotPackage
usePlotPackage
usePreviousPlotPackage
currentPlotPackage
```
| SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | docs | 2059 | # Plots
```@meta
CurrentModule = SignalTablesInterface_PyPlot
```
The functions below are used to *plot* one or more signalTable signals in one or more *diagrams*
within one or more *windows* (figures), and *save* a window (figure) in various *formats* on file
(e.g. png, pdf). The functions below are available after
```julia
using SignalTables # Make Symbols available
usePlotPackage("PyPlot") # or ENV["SignalTablesPlotPackage"] = "PyPlot"
# Other options: "GLMakie", "WGLMakie, "CairoMakie", "SilentNoPlot"
@usingPlotPackage # expands into: using SignalTablesInterface_PyPlot
```
or
```
using Modia # Make Symbols available
usePlotPackage("PyPlot") # or ENV["SignalTablesPlotPackage"] = "PyPlot"
# Other options: "GLMakie", "WGLMakie, "CairoMakie", "SilentNoPlot"
@usingPlotPackage # expands into: using SignalTablesInterface_PyPlot
```
have been executed. The documentation has been generated with [SignalTablesInterface_PyPlot](https://github.com/ModiaSim/SignalTablesInterface_PyPlot.jl).
!!! note
[SignalTables.jl](https://github.com/ModiaSim/SignalTables.jl) exports all symbols of the table.\
[Modia.jl](https://github.com/ModiaSim/Modia.jl) reexports all symbols and uses as *signalTable* argument `instantiatedModel`.
| Plot functions | Description |
|:--------------------------|:---------------------------------------------------------------|
| [`plot`](@ref) | Plot signals from a signal table in multiple diagrams/figures. |
| [`saveFigure`](@ref) | Save figure in different formats on file. |
| [`closeFigure`](@ref) | Close one figure |
| [`closeAllFigures`](@ref) | Close all figures |
| [`showFigure`](@ref) | Show figure in window (only GLMakie, WGLMakie) |
```@docs
plot
saveFigure
closeFigure
closeAllFigures
showFigure
```
| SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | docs | 3619 | # Signal Tables
```@meta
CurrentModule = SignalTables
```
The functions below operate on a *signal table* that implements the [Abstract Signal Table Interface](@ref).
!!! note
[SignalTables.jl](https://github.com/ModiaSim/SignalTables.jl) exports all symbols of this table.\
[Modia.jl](https://github.com/ModiaSim/Modia.jl) reexports all symbols and uses `instantiatedModel` as *signalTable* argument.
| Signal table functions | Description |
|:-----------------------------------|:-----------------------------------------------------------------------------------------------|
| [`new_signal_table`](@ref) | Returns a new signal table dictionary (= OrderedDict{String,Any}("_class" => :SignalTable)). |
| [`SignalTable`](@ref) | Returns a new instance of type SignalTable. |
| [`showInfo`](@ref) | Writes info about a signal table to the output stream. |
| [`getIndependentSignalNames`](@ref)| Returns the names of the independent signals. |
| [`getSignalNames`](@ref) | Returns a string vector of the signal names that are present in a signal table. |
| [`hasSignal`](@ref) | Returns `true` if a signal is present in a signal table. |
| [`getSignal`](@ref) | Returns signal from a signal table as [`Var`](@ref), [`Par`](@ref) or [`Map`](@ref). |
| [`getSignalInfo`](@ref) | Returns signal with :\_typeof, :\_size keys instead of :values/:value keys. |
| [`getIndependentSignalsSize`](@ref)| Returns the lengths of the independent signals as Dims. |
| [`getValues`](@ref) | Returns the *values* of a [`Var`](@ref) signal from a signal table. |
| [`getValuesWithUnit`](@ref) | Returns the *values* of a [`Var`](@ref) signal from a signal table including its unit. |
| [`getValue`](@ref) | Returns the *value* of a [`Par`](@ref) signal from a signal table. |
| [`getValueWithUnit`](@ref) | Returns the *value* of a [`Par`](@ref) signal from a signal table including its unit. |
| [`getFlattenedSignal`](@ref) | Returns a copy of a signal where the values or the value are *flattened* and converted for use in plots or traditional tables. |
| [`getDefaultHeading`](@ref) | Returns the default heading for a plot. |
| [`signalTableToJSON`](@ref) | Returns a JSON string representation of a signal table. |
| [`writeSignalTable`](@ref) | Write a signal table in JSON format on file. |
| [`toSignalTable`](@ref) | Returns a signal table as instance of [`SignalTable`](@ref). |
| [`signalTableToDataFrame`](@ref) | Returns a signal table as [DataFrame](https://github.com/JuliaData/DataFrames.jl) object. |
```@docs
new_signal_table
SignalTable
showInfo
getIndependentSignalNames
getSignalNames
hasSignal
getSignal
getSignalInfo
getIndependentSignalsSize
getValues
getValuesWithUnit
getValue
getValueWithUnit
getFlattenedSignal
getDefaultHeading
signalTableToJSON
writeSignalTable
toSignalTable
signalTableToDataFrame
```
| SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | docs | 2071 | # Signals
```@meta
CurrentModule = SignalTables
```
The functions below operate on *signals*.
!!! note
[SignalTables.jl](https://github.com/ModiaSim/SignalTables.jl) exports all symbols of this table.\
[Modia.jl](https://github.com/ModiaSim/Modia.jl) reexports all symbols.
| Signal functions | Description |
|:--------------------------------|:-------------------------------------------------------------------------------------------|
| [`Var`](@ref) | Returns a variable signal definition in form of a dictionary. |
| [`Par`](@ref) | Returns a parameter signal definition in form of a dictionary. |
| [`Map`](@ref) | Returns an attribute signal definition in form of a dictionary. |
| [`isVar`](@ref) | Returns true, if signal is a [`Var`](@ref). |
| [`isPar`](@ref) | Returns true, if signal is a [`Par`](@ref). |
| [`isMap`](@ref) | Returns true, if signal is a [`Map`](@ref). |
| [`isSignal`](@ref) | Returns true, if signal is a [`Var`](@ref), [`Par`](@ref) or [`Map`](@ref). |
| [`showSignal`](@ref) | Prints a [`Var`](@ref), [`Par`](@ref) or [`Map`](@ref) signal to io. |
| [`eltypeOrType`](@ref) | Returns eltype of an array (but without Missing) and otherwise returns typeof. |
| [`quantity`](@ref) | Returns `Unitful.Quantity` from numberType and numberUnit, e.g. `quantity(Float64,u"m/s")` |
| [`unitAsParseableString`](@ref) | Returns the unit as a String that can be parsed with `Unitful.uparse`, e.g. "m*s^-1" |
```@docs
Var
Par
Map
isVar
isPar
isMap
isSignal
showSignal
eltypeOrType
quantity
unitAsParseableString
```
| SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | docs | 1342 | # Abstract Plot Interface
```@meta
CurrentModule = SignalTablesInterface_PyPlot
```
This chapter documents the *abstract plot interface* for which an implementation has to be provided,
in order that the corresponding plot package can be used from the functions of SignalTables to
provide plots in a convenient way.
For every plot package `XXX.jl` an interface package `SignalTablesInterface_XXX.jl` has to be provided
that implements the following functions (with exception of `plot`, all other functions
can be just dummy functions; the docu below was generated with [SignalTablesInterface_PyPlot](https://github.com/ModiaSim/SignalTablesInterface_PyPlot.jl)).
| Functions | Description |
|:---------------------------|:----------------------------------------------------------|
| [`plot`](@ref) | Plot signals of a signalTable in multiple diagrams within multiple windows/figures (*required*). |
| [`saveFigure`](@ref) | Save figure in different formats on file (*required*). |
| [`closeFigure`](@ref) | Close one figure (*required*) |
| [`closeAllFigures`](@ref) | Close all figures (*required*) |
| [`showFigure`](@ref) | Show figure in window (*required*) |
| SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.4.4 | 51d22822acd421c4b99c6c39345a4e3b0e52694e | docs | 2435 | # Abstract Signal Table Interface
```@meta
CurrentModule = SignalTables
```
This chapter documents the *Abstract Signal Table Interface* for which an implementation has to be provided,
in order that the functions (see [Overview of Functions](@ref)) of the SignalTables package can be used.
A *signal table* is an *ordered dictionary* of *signals* with string keys. The first k entries
represent the k independent signals. A *signal* is either a
- [`Var`](@ref) dictionary that has a required *:values* key representing a *signal array* of any element type
as function of the independent signal(s) (or is the k-th independent variable), or a
- [`Par`](@ref) dictionary that has an optional *:value* key representing a constant of any type.
A *signal array* has indices `[i1,i2,...,j1,j2,...]` to hold variable elements `[j1,j2,...]`
at the `[i1,i2,...]` independent signal(s). If an element of a signal array is *not defined*
it has a value of *missing*. In both dictionaries, additional attributes can be stored,
for example units, into texts, variability (continuous, clocked, ...), alias.
Functions that are marked as *required*, need to be defined for a new signal table type.
Functions that are marked as *optional* have a default implementation.
| Abstract functions | Description |
|:-----------------------------------|:----------------------------------------------------------------------------------------|
| [`getIndependentSignalNames`](@ref) | Returns a string vector of the names of the independent signals (*required*). |
| [`getSignalNames`](@ref) | Returns a string vector of the signal names from a signal table (*required*). |
| [`getSignal`](@ref) | Returns signal from a signal table as [`Var`](@ref) or as [`Par`](@ref) (*required*). |
| [`getSignalInfo`](@ref) | Returns signal with :\_typeof, :\_size keys instead of :values/:value key (*optional*). |
| [`getIndependentSignalsSize`](@ref)| Returns the lengths of the independent signals as Dims. (*optional*). |
| [`getDefaultHeading`](@ref) | Returns the default heading for a plot. (*optional*). |
| [`hasSignal`](@ref) | Returns true if signal name is present in signal table. (*optional*). |
| SignalTables | https://github.com/ModiaSim/SignalTables.jl.git |
|
[
"MIT"
]
| 0.2.0 | a31133b7c2707f5f9216d3bf0c99c5f034d8342d | code | 1932 | module ColorBitstring
export printbits, printlnbits, binarystring, parsebinary
printred(io::IO, x) = print(io, "\x1b[31m" * x * "\x1b[0m")
printgreen(io::IO, x) = print(io, "\x1b[32m" * x * "\x1b[0m")
printblue(io::IO, x) = print(io, "\x1b[34m" * x * "\x1b[0m")
function printbits(io::IO, x::Float16)
bts = bitstring(x)
printred(io, bts[1:1])
printgreen(io, bts[2:6])
printblue(io, bts[7:end])
end
function printbits(io::IO, x::Float32)
bts = bitstring(x)
printred(io, bts[1:1])
printgreen(io, bts[2:2+8-1])
printblue(io, bts[2+8:end])
end
function printbits(io::IO, x::Float64)
bts = bitstring(x)
printred(io, bts[1:1])
printgreen(io, bts[2:2+11-1])
printblue(io, bts[2+11:end])
end
function printbits(io::IO, x::Signed)
bts = bitstring(x)
printred(io, bts[1:1])
printblue(io, bts[2:end])
end
printbits(io::IO, x::Unsigned) = printblue(io, bitstring(x))
printbits(x) = printbits(stdout, x)
function printlnbits(x)
printbits(x)
println()
end
# routines for other binary
binarystring(x) = (signbit(x) ? "-" : "") * "(" * string(abs(x); base=2) * ")_2"
function binarystring(x::AbstractFloat)
S = precision(x)-1
j = exponent(x)
str = string(BigInt(big(2)^S * significand(abs(x))); base=2)
str = "2^$j * (" * str[1] * "." * str[2:end] * ")_2"
s_str = if x ≥ 0
""
else
"-"
end
s_str * str
end
function binarystring(x::AbstractIrrational)
str = binarystring(big(x))
str[1:end-3] * "…" * ")_2"
end
function parsebinary(T, str::String)
if str[1] == '-'
s = -1
str = str[2:end]
else
s = 1
end
j = findfirst(isequal('.'), str)
if isnothing(j)
s*convert(T, parse(BigInt, str; base=2))
else
intpart = parse(BigInt, str[1:j-1] * str[j+1:end]; base=2)
convert(T, s * intpart/(big(2)^(length(str)-j)))
end
end
end | ColorBitstring | https://github.com/dlfivefifty/ColorBitstring.jl.git |
|
[
"MIT"
]
| 0.2.0 | a31133b7c2707f5f9216d3bf0c99c5f034d8342d | code | 2122 | using ColorBitstring, Test
@testset "ColorBitstring" begin
io = IOBuffer()
printbits(io, Float16(1))
@test String(take!(io)) == "\e[31m0\e[0m\e[32m01111\e[0m\e[34m0000000000\e[0m"
printbits(io, Float32(1))
@test String(take!(io)) == "\e[31m0\e[0m\e[32m01111111\e[0m\e[34m00000000000000000000000\e[0m"
printbits(io, 1.0)
@test String(take!(io)) == "\e[31m0\e[0m\e[32m01111111111\e[0m\e[34m0000000000000000000000000000000000000000000000000000\e[0m"
printbits(io, 1)
end
@testset "binarystring" begin
@test binarystring(2) == "(10)_2"
@test binarystring(-2) == "-(10)_2"
@test binarystring(2.0) == "2^1 * (1.0000000000000000000000000000000000000000000000000000)_2"
@test binarystring(Float16(2)) == "2^1 * (1.0000000000)_2"
@test binarystring(-2.0) == "-2^1 * (1.0000000000000000000000000000000000000000000000000000)_2"
@test binarystring(-Float16(2)) == "-2^1 * (1.0000000000)_2"
@test binarystring(1/2.0) == "2^-1 * (1.0000000000000000000000000000000000000000000000000000)_2"
@test binarystring(1/Float16(2)) == "2^-1 * (1.0000000000)_2"
@test binarystring(-1/2.0) == "-2^-1 * (1.0000000000000000000000000000000000000000000000000000)_2"
@test binarystring(-1/Float16(2)) == "-2^-1 * (1.0000000000)_2"
end
@testset "parsebinary" begin
@test parsebinary(Float64, "1") ≡ 1.0
@test parsebinary(Float32, "1") ≡ 1.0f0
@test parsebinary(Float64, "-1") ≡ -1.0
@test parsebinary(Float32, "-1") ≡ -1.0f0
@test parsebinary(Float64, "10") ≡ 2.0
@test parsebinary(Float32, "10") ≡ 2.0f0
@test parsebinary(Float64, "-10") ≡ -2.0
@test parsebinary(Float32, "-10") ≡ -2.0f0
@test parsebinary(Float32, "1.") ≡ 1.0f0
@test parsebinary(Float32, "1.") ≡ 1.0f0
@test parsebinary(Float64, "1.001") ≡ 1.125
@test parsebinary(Float32, "1.001") ≡ 1.125f0
@test parsebinary(Float64, "10.001") ≡ 2.125
@test parsebinary(Float32, "10.001") ≡ 2.125f0
@test parsebinary(Float64, ".001") ≡ parsebinary(Float64, "0.001") ≡ 0.125
@test parsebinary(Float64, "-.001") ≡ parsebinary(Float64, "-0.001") ≡ -0.125
end | ColorBitstring | https://github.com/dlfivefifty/ColorBitstring.jl.git |
|
[
"MIT"
]
| 0.2.0 | a31133b7c2707f5f9216d3bf0c99c5f034d8342d | docs | 160 | # ColorBitstring.jl
A Julia package for colorized version of bitstring
<img src=https://github.com/dlfivefifty/ColorBitstring.jl/raw/main/images/example.png> | ColorBitstring | https://github.com/dlfivefifty/ColorBitstring.jl.git |
|
[
"MIT"
]
| 0.1.1 | e100c4b8fbd8394f8603216c87e0858959595558 | code | 361 | module GNSSDecoder
using DocStringExtensions, GNSSSignals, BitIntegers, ViterbiDecoder, CRC
export decode, GPSL1DecoderState, GalileoE1BDecoderState, is_sat_healthy, GNSSDecoderState
galCRC24 = crc(spec(24, 0x864cfb, 0x000000, false, false, 0x000000, 0xcde703))
include("gnss.jl")
include("bit_fiddling.jl")
include("gpsl1.jl")
include("galileo_e1b.jl")
end | GNSSDecoder | https://github.com/JuliaGNSS/GNSSDecoder.jl.git |
Subsets and Splits
No community queries yet
The top public SQL queries from the community will appear here once available.