
text
stringlengths 7
318k
| id
stringlengths 14
166
| metadata
dict | __index_level_0__
int64 0
439
|
|---|---|---|---|
use std::collections::HashMap;
use crate::utils::wrap_err;
use crate::{PyDType, PyTensor};
use candle_onnx::eval::{dtype, get_tensor, simple_eval};
use candle_onnx::onnx::tensor_proto::DataType;
use candle_onnx::onnx::tensor_shape_proto::dimension::Value;
use candle_onnx::onnx::type_proto::{Tensor as ONNXTensor, Value as ONNXValue};
use candle_onnx::onnx::{ModelProto, ValueInfoProto};
use pyo3::exceptions::PyValueError;
use pyo3::prelude::*;
use pyo3::types::{PyList, PyTuple};
#[derive(Clone, Debug)]
#[pyclass(name = "ONNXTensorDescription")]
/// A wrapper around an ONNX tensor description.
pub struct PyONNXTensorDescriptor(ONNXTensor);
#[pymethods]
impl PyONNXTensorDescriptor {
#[getter]
/// The data type of the tensor.
/// &RETURNS&: DType
fn dtype(&self) -> PyResult<PyDType> {
match DataType::try_from(self.0.elem_type) {
Ok(dt) => match dtype(dt) {
Some(dt) => Ok(PyDType(dt)),
None => Err(PyValueError::new_err(format!(
"unsupported 'value' data-type {dt:?}"
))),
},
type_ => Err(PyValueError::new_err(format!(
"unsupported input type {type_:?}"
))),
}
}
#[getter]
/// The shape of the tensor.
/// &RETURNS&: Tuple[Union[int,str,Any]]
fn shape(&self, py: Python) -> PyResult<Py<PyTuple>> {
let shape = PyList::empty(py);
if let Some(d) = &self.0.shape {
for dim in d.dim.iter() {
if let Some(value) = &dim.value {
match value {
Value::DimValue(v) => shape.append(*v)?,
Value::DimParam(s) => shape.append(s.clone())?,
};
} else {
return Err(PyValueError::new_err("None value in shape"));
}
}
}
Ok(shape.to_tuple().into())
}
fn __repr__(&self, py: Python) -> String {
match (self.shape(py), self.dtype()) {
(Ok(shape), Ok(dtype)) => format!(
"TensorDescriptor[shape: {:?}, dtype: {:?}]",
shape.to_string(),
dtype.__str__()
),
(Err(_), Err(_)) => "TensorDescriptor[shape: unknown, dtype: unknown]".to_string(),
(Err(_), Ok(dtype)) => format!(
"TensorDescriptor[shape: unknown, dtype: {:?}]",
dtype.__str__()
),
(Ok(shape), Err(_)) => format!(
"TensorDescriptor[shape: {:?}, dtype: unknown]",
shape.to_string()
),
}
}
fn __str__(&self, py: Python) -> String {
self.__repr__(py)
}
}
#[derive(Clone, Debug)]
#[pyclass(name = "ONNXModel")]
/// A wrapper around an ONNX model.
pub struct PyONNXModel(ModelProto);
fn extract_tensor_descriptions(
value_infos: &[ValueInfoProto],
) -> HashMap<String, PyONNXTensorDescriptor> {
let mut map = HashMap::new();
for value_info in value_infos.iter() {
let input_type = match &value_info.r#type {
Some(input_type) => input_type,
None => continue,
};
let input_type = match &input_type.value {
Some(input_type) => input_type,
None => continue,
};
let tensor_type: &ONNXTensor = match input_type {
ONNXValue::TensorType(tt) => tt,
_ => continue,
};
map.insert(
value_info.name.to_string(),
PyONNXTensorDescriptor(tensor_type.clone()),
);
}
map
}
#[pymethods]
impl PyONNXModel {
#[new]
#[pyo3(text_signature = "(self, path:str)")]
/// Load an ONNX model from the given path.
fn new(path: String) -> PyResult<Self> {
let model: ModelProto = candle_onnx::read_file(path).map_err(wrap_err)?;
Ok(PyONNXModel(model))
}
#[getter]
/// The version of the IR this model targets.
/// &RETURNS&: int
fn ir_version(&self) -> i64 {
self.0.ir_version
}
#[getter]
/// The producer of the model.
/// &RETURNS&: str
fn producer_name(&self) -> String {
self.0.producer_name.clone()
}
#[getter]
/// The version of the producer of the model.
/// &RETURNS&: str
fn producer_version(&self) -> String {
self.0.producer_version.clone()
}
#[getter]
/// The domain of the operator set of the model.
/// &RETURNS&: str
fn domain(&self) -> String {
self.0.domain.clone()
}
#[getter]
/// The version of the model.
/// &RETURNS&: int
fn model_version(&self) -> i64 {
self.0.model_version
}
#[getter]
/// The doc string of the model.
/// &RETURNS&: str
fn doc_string(&self) -> String {
self.0.doc_string.clone()
}
/// Get the weights of the model.
/// &RETURNS&: Dict[str, Tensor]
fn initializers(&self) -> PyResult<HashMap<String, PyTensor>> {
let mut map = HashMap::new();
if let Some(graph) = self.0.graph.as_ref() {
for tensor_description in graph.initializer.iter() {
let tensor = get_tensor(tensor_description, tensor_description.name.as_str())
.map_err(wrap_err)?;
map.insert(tensor_description.name.to_string(), PyTensor(tensor));
}
}
Ok(map)
}
#[getter]
/// The inputs of the model.
/// &RETURNS&: Optional[Dict[str, ONNXTensorDescription]]
fn inputs(&self) -> Option<HashMap<String, PyONNXTensorDescriptor>> {
if let Some(graph) = self.0.graph.as_ref() {
return Some(extract_tensor_descriptions(&graph.input));
}
None
}
#[getter]
/// The outputs of the model.
/// &RETURNS&: Optional[Dict[str, ONNXTensorDescription]]
fn outputs(&self) -> Option<HashMap<String, PyONNXTensorDescriptor>> {
if let Some(graph) = self.0.graph.as_ref() {
return Some(extract_tensor_descriptions(&graph.output));
}
None
}
#[pyo3(text_signature = "(self, inputs:Dict[str,Tensor])")]
/// Run the model on the given inputs.
/// &RETURNS&: Dict[str,Tensor]
fn run(&self, inputs: HashMap<String, PyTensor>) -> PyResult<HashMap<String, PyTensor>> {
let unwrapped_tensors = inputs.into_iter().map(|(k, v)| (k.clone(), v.0)).collect();
let result = simple_eval(&self.0, unwrapped_tensors).map_err(wrap_err)?;
Ok(result
.into_iter()
.map(|(k, v)| (k.clone(), PyTensor(v)))
.collect())
}
}
| candle/candle-pyo3/src/onnx.rs/0 | {
"file_path": "candle/candle-pyo3/src/onnx.rs",
"repo_id": "candle",
"token_count": 3266
} | 31 |
pub mod generation;
pub mod models;
pub mod object_detection;
pub mod pipelines;
pub mod quantized_nn;
pub mod quantized_var_builder;
pub mod utils;
| candle/candle-transformers/src/lib.rs/0 | {
"file_path": "candle/candle-transformers/src/lib.rs",
"repo_id": "candle",
"token_count": 47
} | 32 |
//! RepVGG inference implementation
//!
//! See "RepVGG: Making VGG-style ConvNets Great Again" Ding et al. 2021
//! https://arxiv.org/abs/2101.03697
use candle::{Result, Tensor, D};
use candle_nn::{
batch_norm, conv2d_no_bias, linear, BatchNorm, Conv2d, Conv2dConfig, Func, VarBuilder,
};
const CHANNELS_PER_STAGE: [usize; 5] = [64, 64, 128, 256, 512];
#[derive(Clone)]
pub struct Config {
a: f32,
b: f32,
groups: usize,
stages: [usize; 4],
}
impl Config {
pub fn a0() -> Self {
Self {
a: 0.75,
b: 2.5,
groups: 1,
stages: [2, 4, 14, 1],
}
}
pub fn a1() -> Self {
Self {
a: 1.0,
b: 2.5,
groups: 1,
stages: [2, 4, 14, 1],
}
}
pub fn a2() -> Self {
Self {
a: 1.5,
b: 2.75,
groups: 1,
stages: [2, 4, 14, 1],
}
}
pub fn b0() -> Self {
Self {
a: 1.0,
b: 2.5,
groups: 1,
stages: [4, 6, 16, 1],
}
}
pub fn b1() -> Self {
Self {
a: 2.0,
b: 4.0,
groups: 1,
stages: [4, 6, 16, 1],
}
}
pub fn b2() -> Self {
Self {
a: 2.5,
b: 5.0,
groups: 1,
stages: [4, 6, 16, 1],
}
}
pub fn b3() -> Self {
Self {
a: 3.0,
b: 5.0,
groups: 1,
stages: [4, 6, 16, 1],
}
}
pub fn b1g4() -> Self {
Self {
a: 2.0,
b: 4.0,
groups: 4,
stages: [4, 6, 16, 1],
}
}
pub fn b2g4() -> Self {
Self {
a: 2.5,
b: 5.0,
groups: 4,
stages: [4, 6, 16, 1],
}
}
pub fn b3g4() -> Self {
Self {
a: 3.0,
b: 5.0,
groups: 4,
stages: [4, 6, 16, 1],
}
}
}
// fuses a convolutional kernel and a batchnorm layer into a convolutional layer
// based on the _fuse_bn_tensor method in timm
// see https://github.com/huggingface/pytorch-image-models/blob/main/timm/models/byobnet.py#L602
fn fuse_conv_bn(weights: &Tensor, bn: BatchNorm) -> Result<(Tensor, Tensor)> {
let (gamma, beta) = bn.weight_and_bias().unwrap();
let mu = bn.running_mean();
let sigma = (bn.running_var() + bn.eps())?.sqrt();
let gps = (gamma / sigma)?;
let bias = (beta - mu * &gps)?;
let weights = weights.broadcast_mul(&gps.reshape(((), 1, 1, 1))?)?;
Ok((weights, bias))
}
// A RepVGG layer has a different training time and inference time architecture.
// The latter is a simple and efficient equivalent transformation of the former
// realized by a structural reparameterization technique, where 3x3 and 1x1 convolutions
// along with identity branches and batchnorm layers are fused into a single 3x3 convolution.
fn repvgg_layer(
has_identity: bool,
dim: usize,
stride: usize,
in_channels: usize,
out_channels: usize,
groups: usize,
vb: VarBuilder,
) -> Result<Func<'static>> {
let conv2d_cfg = Conv2dConfig {
stride,
groups,
padding: 1,
..Default::default()
};
// read and reparameterize the 1x1 conv and bn into w1 and b1
// based on https://github.com/huggingface/pytorch-image-models/blob/main/timm/models/byobnet.py#L543
let conv1x1_bn = batch_norm(dim, 1e-5, vb.pp("conv_1x1.bn"))?;
let conv1x1 = conv2d_no_bias(
in_channels,
out_channels,
1,
conv2d_cfg,
vb.pp("conv_1x1.conv"),
)?;
let (mut w1, b1) = fuse_conv_bn(conv1x1.weight(), conv1x1_bn)?;
// resize to 3x3
w1 = w1.pad_with_zeros(D::Minus1, 1, 1)?;
w1 = w1.pad_with_zeros(D::Minus2, 1, 1)?;
// read and reparameterize the 3x3 conv and bn into w3 and b3
let convkxk_bn = batch_norm(dim, 1e-5, vb.pp("conv_kxk.bn"))?;
let conv3x3 = conv2d_no_bias(
in_channels,
out_channels,
3,
conv2d_cfg,
vb.pp("conv_kxk.conv"),
)?;
let (w3, b3) = fuse_conv_bn(conv3x3.weight(), convkxk_bn)?;
let mut w = (w1 + w3)?;
let mut b = (b1 + b3)?;
// read and reparameterize the identity bn into wi and bi
if has_identity {
let identity_bn = batch_norm(dim, 1e-5, vb.pp("identity"))?;
// create a 3x3 convolution equivalent to the identity branch
let mut weights: Vec<f32> = vec![0.0; conv3x3.weight().elem_count()];
// https://github.com/huggingface/pytorch-image-models/blob/main/timm/models/byobnet.py#L620
let in_dim = in_channels / groups;
for i in 0..in_channels {
weights[i * in_dim * 3 * 3 + (i % in_dim) * 3 * 3 + 4] = 1.0;
}
let weights = &Tensor::from_vec(weights, w.shape(), w.device())?;
let (wi, bi) = fuse_conv_bn(weights, identity_bn)?;
w = (w + wi)?;
b = (b + bi)?;
}
// create the 3x3 conv equivalent to the sum of 3x3, 1x1 and identity branches
let reparam_conv = Conv2d::new(w, Some(b), conv2d_cfg);
Ok(Func::new(move |xs| {
let xs = xs.apply(&reparam_conv)?.relu()?;
Ok(xs)
}))
}
// Get the number of output channels per stage taking into account the multipliers
fn output_channels_per_stage(a: f32, b: f32, stage: usize) -> usize {
let channels = CHANNELS_PER_STAGE[stage] as f32;
match stage {
0 => std::cmp::min(64, (channels * a) as usize),
4 => (channels * b) as usize,
_ => (channels * a) as usize,
}
}
// Each stage is made of layers. The first layer always downsamples with stride 2.
// All but the first layer have a residual connection.
// The G4 variants have a groupwise convolution instead of a dense one on odd layers
// counted across stage boundaries, so we keep track of which layer we are in the
// full model.
fn repvgg_stage(cfg: &Config, idx: usize, vb: VarBuilder) -> Result<Func<'static>> {
let nlayers = cfg.stages[idx - 1];
let mut layers = Vec::with_capacity(nlayers);
let prev_layers: usize = cfg.stages[..idx - 1].iter().sum();
let out_channels_prev = output_channels_per_stage(cfg.a, cfg.b, idx - 1);
let out_channels = output_channels_per_stage(cfg.a, cfg.b, idx);
for layer_idx in 0..nlayers {
let (has_identity, stride, in_channels) = if layer_idx == 0 {
(false, 2, out_channels_prev)
} else {
(true, 1, out_channels)
};
let groups = if (prev_layers + layer_idx) % 2 == 1 {
cfg.groups
} else {
1
};
layers.push(repvgg_layer(
has_identity,
out_channels,
stride,
in_channels,
out_channels,
groups,
vb.pp(layer_idx),
)?)
}
Ok(Func::new(move |xs| {
let mut xs = xs.clone();
for layer in layers.iter() {
xs = xs.apply(layer)?
}
Ok(xs)
}))
}
// Build a RepVGG model for a given configuration.
fn repvgg_model(config: &Config, nclasses: Option<usize>, vb: VarBuilder) -> Result<Func<'static>> {
let cls = match nclasses {
None => None,
Some(nclasses) => {
let outputs = output_channels_per_stage(config.a, config.b, 4);
let linear = linear(outputs, nclasses, vb.pp("head.fc"))?;
Some(linear)
}
};
let stem_dim = output_channels_per_stage(config.a, config.b, 0);
let stem = repvgg_layer(false, stem_dim, 2, 3, stem_dim, 1, vb.pp("stem"))?;
let vb = vb.pp("stages");
let stage1 = repvgg_stage(config, 1, vb.pp(0))?;
let stage2 = repvgg_stage(config, 2, vb.pp(1))?;
let stage3 = repvgg_stage(config, 3, vb.pp(2))?;
let stage4 = repvgg_stage(config, 4, vb.pp(3))?;
Ok(Func::new(move |xs| {
let xs = xs
.apply(&stem)?
.apply(&stage1)?
.apply(&stage2)?
.apply(&stage3)?
.apply(&stage4)?
.mean(D::Minus1)?
.mean(D::Minus1)?;
match &cls {
None => Ok(xs),
Some(cls) => xs.apply(cls),
}
}))
}
pub fn repvgg(cfg: &Config, nclasses: usize, vb: VarBuilder) -> Result<Func<'static>> {
repvgg_model(cfg, Some(nclasses), vb)
}
pub fn repvgg_no_final_layer(cfg: &Config, vb: VarBuilder) -> Result<Func<'static>> {
repvgg_model(cfg, None, vb)
}
| candle/candle-transformers/src/models/repvgg.rs/0 | {
"file_path": "candle/candle-transformers/src/models/repvgg.rs",
"repo_id": "candle",
"token_count": 4371
} | 33 |
//! ResNet Building Blocks
//!
//! Some Residual Network blocks used in UNet models.
//!
//! Denoising Diffusion Implicit Models, K. He and al, 2015.
//! https://arxiv.org/abs/1512.03385
use crate::models::with_tracing::{conv2d, Conv2d};
use candle::{Result, Tensor, D};
use candle_nn as nn;
use candle_nn::Module;
/// Configuration for a ResNet block.
#[derive(Debug, Clone, Copy)]
pub struct ResnetBlock2DConfig {
/// The number of output channels, defaults to the number of input channels.
pub out_channels: Option<usize>,
pub temb_channels: Option<usize>,
/// The number of groups to use in group normalization.
pub groups: usize,
pub groups_out: Option<usize>,
/// The epsilon to be used in the group normalization operations.
pub eps: f64,
/// Whether to use a 2D convolution in the skip connection. When using None,
/// such a convolution is used if the number of input channels is different from
/// the number of output channels.
pub use_in_shortcut: Option<bool>,
// non_linearity: silu
/// The final output is scaled by dividing by this value.
pub output_scale_factor: f64,
}
impl Default for ResnetBlock2DConfig {
fn default() -> Self {
Self {
out_channels: None,
temb_channels: Some(512),
groups: 32,
groups_out: None,
eps: 1e-6,
use_in_shortcut: None,
output_scale_factor: 1.,
}
}
}
#[derive(Debug)]
pub struct ResnetBlock2D {
norm1: nn::GroupNorm,
conv1: Conv2d,
norm2: nn::GroupNorm,
conv2: Conv2d,
time_emb_proj: Option<nn::Linear>,
conv_shortcut: Option<Conv2d>,
span: tracing::Span,
config: ResnetBlock2DConfig,
}
impl ResnetBlock2D {
pub fn new(
vs: nn::VarBuilder,
in_channels: usize,
config: ResnetBlock2DConfig,
) -> Result<Self> {
let out_channels = config.out_channels.unwrap_or(in_channels);
let conv_cfg = nn::Conv2dConfig {
stride: 1,
padding: 1,
groups: 1,
dilation: 1,
};
let norm1 = nn::group_norm(config.groups, in_channels, config.eps, vs.pp("norm1"))?;
let conv1 = conv2d(in_channels, out_channels, 3, conv_cfg, vs.pp("conv1"))?;
let groups_out = config.groups_out.unwrap_or(config.groups);
let norm2 = nn::group_norm(groups_out, out_channels, config.eps, vs.pp("norm2"))?;
let conv2 = conv2d(out_channels, out_channels, 3, conv_cfg, vs.pp("conv2"))?;
let use_in_shortcut = config
.use_in_shortcut
.unwrap_or(in_channels != out_channels);
let conv_shortcut = if use_in_shortcut {
let conv_cfg = nn::Conv2dConfig {
stride: 1,
padding: 0,
groups: 1,
dilation: 1,
};
Some(conv2d(
in_channels,
out_channels,
1,
conv_cfg,
vs.pp("conv_shortcut"),
)?)
} else {
None
};
let time_emb_proj = match config.temb_channels {
None => None,
Some(temb_channels) => Some(nn::linear(
temb_channels,
out_channels,
vs.pp("time_emb_proj"),
)?),
};
let span = tracing::span!(tracing::Level::TRACE, "resnet2d");
Ok(Self {
norm1,
conv1,
norm2,
conv2,
time_emb_proj,
span,
config,
conv_shortcut,
})
}
pub fn forward(&self, xs: &Tensor, temb: Option<&Tensor>) -> Result<Tensor> {
let _enter = self.span.enter();
let shortcut_xs = match &self.conv_shortcut {
Some(conv_shortcut) => conv_shortcut.forward(xs)?,
None => xs.clone(),
};
let xs = self.norm1.forward(xs)?;
let xs = self.conv1.forward(&nn::ops::silu(&xs)?)?;
let xs = match (temb, &self.time_emb_proj) {
(Some(temb), Some(time_emb_proj)) => time_emb_proj
.forward(&nn::ops::silu(temb)?)?
.unsqueeze(D::Minus1)?
.unsqueeze(D::Minus1)?
.broadcast_add(&xs)?,
_ => xs,
};
let xs = self
.conv2
.forward(&nn::ops::silu(&self.norm2.forward(&xs)?)?)?;
(shortcut_xs + xs)? / self.config.output_scale_factor
}
}
| candle/candle-transformers/src/models/stable_diffusion/resnet.rs/0 | {
"file_path": "candle/candle-transformers/src/models/stable_diffusion/resnet.rs",
"repo_id": "candle",
"token_count": 2284
} | 34 |
use candle::{Module, Result, Tensor};
use candle_nn::{linear, Linear, VarBuilder};
// A simplified version of:
// https://github.com/huggingface/diffusers/blob/119ad2c3dc8a8fb8446a83f4bf6f20929487b47f/src/diffusers/models/attention_processor.py#L38
#[derive(Debug)]
pub struct Attention {
to_q: Linear,
to_k: Linear,
to_v: Linear,
to_out: Linear,
heads: usize,
scale: f64,
use_flash_attn: bool,
}
#[cfg(feature = "flash-attn")]
fn flash_attn(
q: &Tensor,
k: &Tensor,
v: &Tensor,
softmax_scale: f32,
causal: bool,
) -> Result<Tensor> {
candle_flash_attn::flash_attn(q, k, v, softmax_scale, causal)
}
#[cfg(not(feature = "flash-attn"))]
fn flash_attn(_: &Tensor, _: &Tensor, _: &Tensor, _: f32, _: bool) -> Result<Tensor> {
unimplemented!("compile with '--features flash-attn'")
}
impl Attention {
pub fn new(
query_dim: usize,
heads: usize,
dim_head: usize,
use_flash_attn: bool,
vb: VarBuilder,
) -> Result<Self> {
let inner_dim = dim_head * heads;
let scale = 1.0 / f64::sqrt(dim_head as f64);
let to_q = linear(query_dim, inner_dim, vb.pp("to_q"))?;
let to_k = linear(query_dim, inner_dim, vb.pp("to_k"))?;
let to_v = linear(query_dim, inner_dim, vb.pp("to_v"))?;
let to_out = linear(inner_dim, query_dim, vb.pp("to_out.0"))?;
Ok(Self {
to_q,
to_k,
to_v,
to_out,
scale,
heads,
use_flash_attn,
})
}
fn batch_to_head_dim(&self, xs: &Tensor) -> Result<Tensor> {
let (b_size, seq_len, dim) = xs.dims3()?;
xs.reshape((b_size / self.heads, self.heads, seq_len, dim))?
.permute((0, 2, 1, 3))?
.reshape((b_size / self.heads, seq_len, dim * self.heads))
}
fn head_to_batch_dim(&self, xs: &Tensor) -> Result<Tensor> {
let (b_size, seq_len, dim) = xs.dims3()?;
xs.reshape((b_size, seq_len, self.heads, dim / self.heads))?
.permute((0, 2, 1, 3))?
.reshape((b_size * self.heads, seq_len, dim / self.heads))
}
fn get_attention_scores(&self, query: &Tensor, key: &Tensor) -> Result<Tensor> {
let attn_probs = (query.matmul(&key.t()?)? * self.scale)?;
candle_nn::ops::softmax_last_dim(&attn_probs)
}
pub fn forward(&self, xs: &Tensor, encoder_hidden_states: &Tensor) -> Result<Tensor> {
let (b_size, channel, h, w) = xs.dims4()?;
let xs = xs.reshape((b_size, channel, h * w))?.t()?;
let query = self.to_q.forward(&xs)?;
let key = self.to_k.forward(encoder_hidden_states)?;
let value = self.to_v.forward(encoder_hidden_states)?;
let query = self.head_to_batch_dim(&query)?;
let key = self.head_to_batch_dim(&key)?;
let value = self.head_to_batch_dim(&value)?;
let xs = if self.use_flash_attn {
let init_dtype = query.dtype();
let q = query
.to_dtype(candle::DType::F16)?
.unsqueeze(0)?
.transpose(1, 2)?;
let k = key
.to_dtype(candle::DType::F16)?
.unsqueeze(0)?
.transpose(1, 2)?;
let v = value
.to_dtype(candle::DType::F16)?
.unsqueeze(0)?
.transpose(1, 2)?;
flash_attn(&q, &k, &v, self.scale as f32, false)?
.transpose(1, 2)?
.squeeze(0)?
.to_dtype(init_dtype)?
} else {
let attn_prs = self.get_attention_scores(&query, &key)?;
attn_prs.matmul(&value)?
};
let xs = self.batch_to_head_dim(&xs)?;
self.to_out
.forward(&xs)?
.t()?
.reshape((b_size, channel, h, w))
}
}
| candle/candle-transformers/src/models/wuerstchen/attention_processor.rs/0 | {
"file_path": "candle/candle-transformers/src/models/wuerstchen/attention_processor.rs",
"repo_id": "candle",
"token_count": 2076
} | 35 |
## Running [llama2.c](https://github.com/karpathy/llama2.c) Examples
Here, we provide two examples of how to run [llama2.c](https://github.com/karpathy/llama2.c) written in Rust using a Candle-compiled WASM binary and runtimes.
### Pure Rust UI
To build and test the UI made in Rust you will need [Trunk](https://trunkrs.dev/#install)
From the `candle-wasm-examples/llama2-c` directory run:
Download assets:
```bash
# Model and tokenizer
wget -c https://huggingface.co/spaces/lmz/candle-llama2/resolve/main/model.bin
wget -c https://huggingface.co/spaces/lmz/candle-llama2/resolve/main/tokenizer.json
```
Run hot reload server:
```bash
trunk serve --release --public-url / --port 8080
```
### Vanilla JS and WebWorkers
To build and test the UI made in Vanilla JS and WebWorkers, first we need to build the WASM library:
```bash
sh build-lib.sh
```
This will bundle the library under `./build` and we can import it inside our WebWorker like a normal JS module:
```js
import init, { Model } from "./build/m.js";
```
The full example can be found under `./lib-example.html`. All needed assets are fetched from the web, so no need to download anything.
Finally, you can preview the example by running a local HTTP server. For example:
```bash
python -m http.server
```
Then open `http://localhost:8000/lib-example.html` in your browser.
| candle/candle-wasm-examples/llama2-c/README.md/0 | {
"file_path": "candle/candle-wasm-examples/llama2-c/README.md",
"repo_id": "candle",
"token_count": 449
} | 36 |
import init, { Model } from "./build/m.js";
async function fetchArrayBuffer(url) {
const cacheName = "phi-mixformer-candle-cache";
const cache = await caches.open(cacheName);
const cachedResponse = await cache.match(url);
if (cachedResponse) {
const data = await cachedResponse.arrayBuffer();
return new Uint8Array(data);
}
const res = await fetch(url, { cache: "force-cache" });
cache.put(url, res.clone());
return new Uint8Array(await res.arrayBuffer());
}
async function concatenateArrayBuffers(urls) {
const arrayBuffers = await Promise.all(urls.map(url => fetchArrayBuffer(url)));
let totalLength = arrayBuffers.reduce((acc, arrayBuffer) => acc + arrayBuffer.byteLength, 0);
let concatenatedBuffer = new Uint8Array(totalLength);
let offset = 0;
arrayBuffers.forEach(buffer => {
concatenatedBuffer.set(new Uint8Array(buffer), offset);
offset += buffer.byteLength;
});
return concatenatedBuffer;
}
class Phi {
static instance = {};
static async getInstance(
weightsURL,
modelID,
tokenizerURL,
configURL,
quantized
) {
// load individual modelID only once
if (!this.instance[modelID]) {
await init();
self.postMessage({ status: "loading", message: "Loading Model" });
const [weightsArrayU8, tokenizerArrayU8, configArrayU8] =
await Promise.all([
weightsURL instanceof Array ? concatenateArrayBuffers(weightsURL) : fetchArrayBuffer(weightsURL),
fetchArrayBuffer(tokenizerURL),
fetchArrayBuffer(configURL),
]);
this.instance[modelID] = new Model(
weightsArrayU8,
tokenizerArrayU8,
configArrayU8,
quantized
);
}
return this.instance[modelID];
}
}
let controller = null;
self.addEventListener("message", (event) => {
if (event.data.command === "start") {
controller = new AbortController();
generate(event.data);
} else if (event.data.command === "abort") {
controller.abort();
}
});
async function generate(data) {
const {
weightsURL,
modelID,
tokenizerURL,
configURL,
quantized,
prompt,
temp,
top_p,
repeatPenalty,
seed,
maxSeqLen,
} = data;
try {
self.postMessage({ status: "loading", message: "Starting Phi" });
const model = await Phi.getInstance(
weightsURL,
modelID,
tokenizerURL,
configURL,
quantized
);
self.postMessage({ status: "loading", message: "Initializing model" });
const firstToken = model.init_with_prompt(
prompt,
temp,
top_p,
repeatPenalty,
64,
BigInt(seed)
);
const seq_len = 2048;
let sentence = firstToken;
let maxTokens = maxSeqLen ? maxSeqLen : seq_len - prompt.length - 1;
let startTime = performance.now();
let tokensCount = 0;
while (tokensCount < maxTokens) {
await new Promise(async (resolve) => {
if (controller && controller.signal.aborted) {
self.postMessage({
status: "aborted",
message: "Aborted",
output: prompt + sentence,
});
return;
}
const token = await model.next_token();
if (token === "<|endoftext|>") {
self.postMessage({
status: "complete",
message: "complete",
output: prompt + sentence,
});
return;
}
const tokensSec =
((tokensCount + 1) / (performance.now() - startTime)) * 1000;
sentence += token;
self.postMessage({
status: "generating",
message: "Generating token",
token: token,
sentence: sentence,
totalTime: performance.now() - startTime,
tokensSec,
prompt: prompt,
});
setTimeout(resolve, 0);
});
tokensCount++;
}
self.postMessage({
status: "complete",
message: "complete",
output: prompt + sentence,
});
} catch (e) {
self.postMessage({ error: e });
}
}
| candle/candle-wasm-examples/phi/phiWorker.js/0 | {
"file_path": "candle/candle-wasm-examples/phi/phiWorker.js",
"repo_id": "candle",
"token_count": 1667
} | 37 |
use candle::{Device, Tensor};
use candle_transformers::generation::LogitsProcessor;
pub use candle_transformers::models::quantized_t5::{
Config, T5EncoderModel, T5ForConditionalGeneration, VarBuilder,
};
use candle_wasm_example_t5::console_log;
use tokenizers::Tokenizer;
use wasm_bindgen::prelude::*;
const DEVICE: Device = Device::Cpu;
#[wasm_bindgen]
pub struct ModelEncoder {
model: T5EncoderModel,
tokenizer: Tokenizer,
}
#[wasm_bindgen]
pub struct ModelConditionalGeneration {
model: T5ForConditionalGeneration,
tokenizer: Tokenizer,
config: Config,
}
#[wasm_bindgen]
impl ModelConditionalGeneration {
#[wasm_bindgen(constructor)]
pub fn load(
weights: Vec<u8>,
tokenizer: Vec<u8>,
config: Vec<u8>,
) -> Result<ModelConditionalGeneration, JsError> {
console_error_panic_hook::set_once();
console_log!("loading model");
let vb = VarBuilder::from_gguf_buffer(&weights, &DEVICE)?;
let mut config: Config = serde_json::from_slice(&config)?;
let tokenizer =
Tokenizer::from_bytes(&tokenizer).map_err(|m| JsError::new(&m.to_string()))?;
let model = T5ForConditionalGeneration::load(vb, &config)?;
config.use_cache = false;
Ok(Self {
model,
tokenizer,
config,
})
}
pub fn decode(&mut self, input: JsValue) -> Result<JsValue, JsError> {
let input: ConditionalGenerationParams =
serde_wasm_bindgen::from_value(input).map_err(|m| JsError::new(&m.to_string()))?;
let device = &DEVICE;
self.model.clear_kv_cache();
let mut output_token_ids = [self.config.pad_token_id as u32].to_vec();
let prompt = input.prompt;
let repeat_penalty = input.repeat_penalty;
let repeat_last_n = input.repeat_last_n;
let seed = input.seed;
let max_length = usize::clamp(input.max_length.unwrap_or(512), 0, 512);
let temperature = if input.temperature <= 0. {
None
} else {
Some(input.temperature)
};
let top_p = if input.top_p <= 0. || input.top_p >= 1. {
None
} else {
Some(input.top_p)
};
let mut logits_processor = LogitsProcessor::new(seed, temperature, top_p);
let tokens = self
.tokenizer
.encode(prompt, true)
.map_err(|m| JsError::new(&m.to_string()))?
.get_ids()
.to_vec();
let input_token_ids = Tensor::new(&tokens[..], device)?.unsqueeze(0)?;
let encoder_output = self.model.encode(&input_token_ids)?;
let mut decoded = String::new();
for index in 0.. {
if output_token_ids.len() > max_length {
break;
}
let decoder_token_ids = if index == 0 {
Tensor::new(output_token_ids.as_slice(), device)?.unsqueeze(0)?
} else {
let last_token = *output_token_ids.last().unwrap();
Tensor::new(&[last_token], device)?.unsqueeze(0)?
};
let logits = self
.model
.decode(&decoder_token_ids, &encoder_output)?
.squeeze(0)?;
let logits = if repeat_penalty == 1. {
logits
} else {
let start_at = output_token_ids.len().saturating_sub(repeat_last_n);
candle_transformers::utils::apply_repeat_penalty(
&logits,
repeat_penalty,
&output_token_ids[start_at..],
)?
};
let next_token_id = logits_processor.sample(&logits)?;
if next_token_id as usize == self.config.eos_token_id {
break;
}
output_token_ids.push(next_token_id);
if let Some(text) = self.tokenizer.id_to_token(next_token_id) {
let text = text.replace('▁', " ").replace("<0x0A>", "\n");
decoded += &text;
}
}
Ok(serde_wasm_bindgen::to_value(
&ConditionalGenerationOutput {
generation: decoded,
},
)?)
}
}
#[wasm_bindgen]
impl ModelEncoder {
#[wasm_bindgen(constructor)]
pub fn load(
weights: Vec<u8>,
tokenizer: Vec<u8>,
config: Vec<u8>,
) -> Result<ModelEncoder, JsError> {
console_error_panic_hook::set_once();
console_log!("loading model");
let vb = VarBuilder::from_gguf_buffer(&weights, &DEVICE)?;
let mut config: Config = serde_json::from_slice(&config)?;
config.use_cache = false;
let tokenizer =
Tokenizer::from_bytes(&tokenizer).map_err(|m| JsError::new(&m.to_string()))?;
let model = T5EncoderModel::load(vb, &config)?;
Ok(Self { model, tokenizer })
}
pub fn decode(&mut self, input: JsValue) -> Result<JsValue, JsError> {
let device = &DEVICE;
let input: DecoderParams =
serde_wasm_bindgen::from_value(input).map_err(|m| JsError::new(&m.to_string()))?;
self.model.clear_kv_cache();
let sentences = input.sentences;
let normalize_embeddings = input.normalize_embeddings;
let n_sentences = sentences.len();
let mut all_embeddings = Vec::with_capacity(n_sentences);
for sentence in sentences {
let tokens = self
.tokenizer
.encode(sentence, true)
.map_err(|m| JsError::new(&m.to_string()))?
.get_ids()
.to_vec();
let token_ids = Tensor::new(&tokens[..], device)?.unsqueeze(0)?;
let embeddings = self.model.forward(&token_ids)?;
console_log!("generated embeddings {:?}", embeddings.shape());
// Apply some avg-pooling by taking the mean embedding value for all tokens (including padding)
let (_n_sentence, n_tokens, _hidden_size) = embeddings.dims3()?;
let embeddings = (embeddings.sum(1)? / (n_tokens as f64))?;
let embeddings = if normalize_embeddings {
embeddings.broadcast_div(&embeddings.sqr()?.sum_keepdim(1)?.sqrt()?)?
} else {
embeddings
};
console_log!("{:?}", embeddings.shape());
all_embeddings.push(embeddings.squeeze(0)?.to_vec1::<f32>()?);
}
Ok(serde_wasm_bindgen::to_value(&DecoderOutput {
embeddings: all_embeddings,
})?)
}
}
#[derive(serde::Serialize, serde::Deserialize)]
struct ConditionalGenerationOutput {
generation: String,
}
#[derive(serde::Serialize, serde::Deserialize)]
struct DecoderOutput {
embeddings: Vec<Vec<f32>>,
}
#[derive(serde::Serialize, serde::Deserialize)]
pub struct DecoderParams {
sentences: Vec<String>,
normalize_embeddings: bool,
}
#[derive(serde::Serialize, serde::Deserialize)]
pub struct ConditionalGenerationParams {
prompt: String,
temperature: f64,
seed: u64,
top_p: f64,
repeat_penalty: f32,
repeat_last_n: usize,
max_length: Option<usize>,
}
fn main() {
console_error_panic_hook::set_once();
}
| candle/candle-wasm-examples/t5/src/bin/m-quantized.rs/0 | {
"file_path": "candle/candle-wasm-examples/t5/src/bin/m-quantized.rs",
"repo_id": "candle",
"token_count": 3555
} | 38 |
pub const WITH_TIMER: bool = true;
struct Timer {
label: &'static str,
}
// impl Timer {
// fn new(label: &'static str) -> Self {
// if WITH_TIMER {
// web_sys::console::time_with_label(label);
// }
// Self { label }
// }
// }
impl Drop for Timer {
fn drop(&mut self) {
if WITH_TIMER {
web_sys::console::time_end_with_label(self.label)
}
}
}
mod app;
mod audio;
pub mod languages;
pub mod worker;
pub use app::App;
pub use worker::Worker;
| candle/candle-wasm-examples/whisper/src/lib.rs/0 | {
"file_path": "candle/candle-wasm-examples/whisper/src/lib.rs",
"repo_id": "candle",
"token_count": 252
} | 39 |
//load the candle yolo wasm module
import init, { Model, ModelPose } from "./build/m.js";
async function fetchArrayBuffer(url) {
const cacheName = "yolo-candle-cache";
const cache = await caches.open(cacheName);
const cachedResponse = await cache.match(url);
if (cachedResponse) {
const data = await cachedResponse.arrayBuffer();
return new Uint8Array(data);
}
const res = await fetch(url, { cache: "force-cache" });
cache.put(url, res.clone());
return new Uint8Array(await res.arrayBuffer());
}
class Yolo {
static instance = {};
// Retrieve the YOLO model. When called for the first time,
// this will load the model and save it for future use.
static async getInstance(modelID, modelURL, modelSize) {
// load individual modelID only once
if (!this.instance[modelID]) {
await init();
self.postMessage({ status: `loading model ${modelID}:${modelSize}` });
const weightsArrayU8 = await fetchArrayBuffer(modelURL);
if (/pose/.test(modelID)) {
// if pose model, use ModelPose
this.instance[modelID] = new ModelPose(weightsArrayU8, modelSize);
} else {
this.instance[modelID] = new Model(weightsArrayU8, modelSize);
}
} else {
self.postMessage({ status: "model already loaded" });
}
return this.instance[modelID];
}
}
self.addEventListener("message", async (event) => {
const { imageURL, modelID, modelURL, modelSize, confidence, iou_threshold } =
event.data;
try {
self.postMessage({ status: "detecting" });
const yolo = await Yolo.getInstance(modelID, modelURL, modelSize);
self.postMessage({ status: "loading image" });
const imgRes = await fetch(imageURL);
const imgData = await imgRes.arrayBuffer();
const imageArrayU8 = new Uint8Array(imgData);
self.postMessage({ status: `running inference ${modelID}:${modelSize}` });
const bboxes = yolo.run(imageArrayU8, confidence, iou_threshold);
// Send the output back to the main thread as JSON
self.postMessage({
status: "complete",
output: JSON.parse(bboxes),
});
} catch (e) {
self.postMessage({ error: e });
}
});
| candle/candle-wasm-examples/yolo/yoloWorker.js/0 | {
"file_path": "candle/candle-wasm-examples/yolo/yoloWorker.js",
"repo_id": "candle",
"token_count": 756
} | 40 |
ARG INCLUDE_DB=false
FROM mongo:latest as mongo
FROM node:20-slim as local_db_false
FROM node:20-slim as local_db_true
RUN apt-get update
RUN apt-get install gnupg curl -y
COPY --from=mongo /usr/bin/mongo* /usr/bin/
FROM local_db_${INCLUDE_DB} as final
ARG INCLUDE_DB=false
ENV INCLUDE_DB=${INCLUDE_DB}
WORKDIR /app
COPY --link --chown=1000 package-lock.json package.json ./
RUN --mount=type=cache,target=/app/.npm \
npm set cache /app/.npm && \
npm ci
# copy the rest of the files, run regardless of
COPY --chown=1000 --link . .
RUN chmod +x /app/entrypoint.sh
CMD ["/bin/bash", "-c", "/app/entrypoint.sh"] | chat-ui/Dockerfile.local/0 | {
"file_path": "chat-ui/Dockerfile.local",
"repo_id": "chat-ui",
"token_count": 278
} | 41 |
import { navigating } from "$app/stores";
import { tick } from "svelte";
import { get } from "svelte/store";
const detachedOffset = 10;
/**
* @param node element to snap scroll to bottom
* @param dependency pass in a dependency to update scroll on changes.
*/
export const snapScrollToBottom = (node: HTMLElement, dependency: unknown) => {
let prevScrollValue = node.scrollTop;
let isDetached = false;
const handleScroll = () => {
// if user scrolled up, we detach
if (node.scrollTop < prevScrollValue) {
isDetached = true;
}
// if user scrolled back to within 10px of bottom, we reattach
if (node.scrollTop - (node.scrollHeight - node.clientHeight) >= -detachedOffset) {
isDetached = false;
}
prevScrollValue = node.scrollTop;
};
const updateScroll = async (_options: { force?: boolean } = {}) => {
const defaultOptions = { force: false };
const options = { ...defaultOptions, ..._options };
const { force } = options;
if (!force && isDetached && !get(navigating)) return;
// wait for next tick to ensure that the DOM is updated
await tick();
node.scrollTo({ top: node.scrollHeight });
};
node.addEventListener("scroll", handleScroll);
if (dependency) {
updateScroll({ force: true });
}
return {
update: updateScroll,
destroy: () => {
node.removeEventListener("scroll", handleScroll);
},
};
};
| chat-ui/src/lib/actions/snapScrollToBottom.ts/0 | {
"file_path": "chat-ui/src/lib/actions/snapScrollToBottom.ts",
"repo_id": "chat-ui",
"token_count": 437
} | 42 |
<script lang="ts">
import CarbonRotate360 from "~icons/carbon/rotate-360";
export let classNames = "";
</script>
<button
type="button"
on:click
class="btn flex h-8 rounded-lg border bg-white px-3 py-1 text-gray-500 shadow-sm transition-all hover:bg-gray-100 dark:border-gray-600 dark:bg-gray-700 dark:text-gray-300 dark:hover:bg-gray-600 {classNames}"
>
<CarbonRotate360 class="mr-2 text-xs " /> Retry
</button>
| chat-ui/src/lib/components/RetryBtn.svelte/0 | {
"file_path": "chat-ui/src/lib/components/RetryBtn.svelte",
"repo_id": "chat-ui",
"token_count": 157
} | 43 |
<script lang="ts">
export let classNames = "";
</script>
<svg
width="1em"
height="1em"
viewBox="0 0 15 6"
class={classNames}
fill="none"
xmlns="http://www.w3.org/2000/svg"
>
<path
d="M1.67236 1L7.67236 7L13.6724 1"
stroke="currentColor"
stroke-width="2"
stroke-linecap="round"
stroke-linejoin="round"
/>
</svg>
| chat-ui/src/lib/components/icons/IconChevron.svelte/0 | {
"file_path": "chat-ui/src/lib/components/icons/IconChevron.svelte",
"repo_id": "chat-ui",
"token_count": 156
} | 44 |
import { buildPrompt } from "$lib/buildPrompt";
import { textGenerationStream } from "@huggingface/inference";
import { z } from "zod";
import type { Endpoint } from "../endpoints";
export const endpointAwsParametersSchema = z.object({
weight: z.number().int().positive().default(1),
model: z.any(),
type: z.literal("aws"),
url: z.string().url(),
accessKey: z.string().min(1),
secretKey: z.string().min(1),
sessionToken: z.string().optional(),
service: z.union([z.literal("sagemaker"), z.literal("lambda")]).default("sagemaker"),
region: z.string().optional(),
});
export async function endpointAws(
input: z.input<typeof endpointAwsParametersSchema>
): Promise<Endpoint> {
let AwsClient;
try {
AwsClient = (await import("aws4fetch")).AwsClient;
} catch (e) {
throw new Error("Failed to import aws4fetch");
}
const { url, accessKey, secretKey, sessionToken, model, region, service } =
endpointAwsParametersSchema.parse(input);
const aws = new AwsClient({
accessKeyId: accessKey,
secretAccessKey: secretKey,
sessionToken,
service,
region,
});
return async ({ conversation }) => {
const prompt = await buildPrompt({
messages: conversation.messages,
webSearch: conversation.messages[conversation.messages.length - 1].webSearch,
preprompt: conversation.preprompt,
model,
});
return textGenerationStream(
{
parameters: { ...model.parameters, return_full_text: false },
model: url,
inputs: prompt,
},
{
use_cache: false,
fetch: aws.fetch.bind(aws) as typeof fetch,
}
);
};
}
export default endpointAws;
| chat-ui/src/lib/server/endpoints/aws/endpointAws.ts/0 | {
"file_path": "chat-ui/src/lib/server/endpoints/aws/endpointAws.ts",
"repo_id": "chat-ui",
"token_count": 582
} | 45 |
import { searchWeb } from "$lib/server/websearch/searchWeb";
import type { Message } from "$lib/types/Message";
import type { WebSearch, WebSearchSource } from "$lib/types/WebSearch";
import { generateQuery } from "$lib/server/websearch/generateQuery";
import { parseWeb } from "$lib/server/websearch/parseWeb";
import { chunk } from "$lib/utils/chunk";
import { findSimilarSentences } from "$lib/server/sentenceSimilarity";
import type { Conversation } from "$lib/types/Conversation";
import type { MessageUpdate } from "$lib/types/MessageUpdate";
import { getWebSearchProvider } from "./searchWeb";
import { defaultEmbeddingModel, embeddingModels } from "$lib/server/embeddingModels";
const MAX_N_PAGES_SCRAPE = 10 as const;
const MAX_N_PAGES_EMBED = 5 as const;
const DOMAIN_BLOCKLIST = ["youtube.com", "twitter.com"];
export async function runWebSearch(
conv: Conversation,
prompt: string,
updatePad: (upd: MessageUpdate) => void
) {
const messages = (() => {
return [...conv.messages, { content: prompt, from: "user", id: crypto.randomUUID() }];
})() satisfies Message[];
const webSearch: WebSearch = {
prompt,
searchQuery: "",
results: [],
context: "",
contextSources: [],
createdAt: new Date(),
updatedAt: new Date(),
};
function appendUpdate(message: string, args?: string[], type?: "error" | "update") {
updatePad({ type: "webSearch", messageType: type ?? "update", message, args });
}
try {
webSearch.searchQuery = await generateQuery(messages);
const searchProvider = getWebSearchProvider();
appendUpdate(`Searching ${searchProvider}`, [webSearch.searchQuery]);
const results = await searchWeb(webSearch.searchQuery);
webSearch.results =
(results.organic_results &&
results.organic_results.map((el: { title?: string; link: string; text?: string }) => {
try {
const { title, link, text } = el;
const { hostname } = new URL(link);
return { title, link, hostname, text };
} catch (e) {
// Ignore Errors
return null;
}
})) ??
[];
webSearch.results = webSearch.results.filter((value) => value !== null);
webSearch.results = webSearch.results
.filter(({ link }) => !DOMAIN_BLOCKLIST.some((el) => link.includes(el))) // filter out blocklist links
.slice(0, MAX_N_PAGES_SCRAPE); // limit to first 10 links only
// fetch the model
const embeddingModel =
embeddingModels.find((m) => m.id === conv.embeddingModel) ?? defaultEmbeddingModel;
if (!embeddingModel) {
throw new Error(`Embedding model ${conv.embeddingModel} not available anymore`);
}
let paragraphChunks: { source: WebSearchSource; text: string }[] = [];
if (webSearch.results.length > 0) {
appendUpdate("Browsing results");
const promises = webSearch.results.map(async (result) => {
const { link } = result;
let text = result.text ?? "";
if (!text) {
try {
text = await parseWeb(link);
appendUpdate("Browsing webpage", [link]);
} catch (e) {
// ignore errors
}
}
const MAX_N_CHUNKS = 100;
const texts = chunk(text, embeddingModel.chunkCharLength).slice(0, MAX_N_CHUNKS);
return texts.map((t) => ({ source: result, text: t }));
});
const nestedParagraphChunks = (await Promise.all(promises)).slice(0, MAX_N_PAGES_EMBED);
paragraphChunks = nestedParagraphChunks.flat();
if (!paragraphChunks.length) {
throw new Error("No text found on the first 5 results");
}
} else {
throw new Error("No results found for this search query");
}
appendUpdate("Extracting relevant information");
const topKClosestParagraphs = 8;
const texts = paragraphChunks.map(({ text }) => text);
const indices = await findSimilarSentences(embeddingModel, prompt, texts, {
topK: topKClosestParagraphs,
});
webSearch.context = indices.map((idx) => texts[idx]).join("");
const usedSources = new Set<string>();
for (const idx of indices) {
const { source } = paragraphChunks[idx];
if (!usedSources.has(source.link)) {
usedSources.add(source.link);
webSearch.contextSources.push(source);
}
}
updatePad({
type: "webSearch",
messageType: "sources",
message: "sources",
sources: webSearch.contextSources,
});
} catch (searchError) {
if (searchError instanceof Error) {
appendUpdate("An error occurred", [JSON.stringify(searchError.message)], "error");
}
}
return webSearch;
}
| chat-ui/src/lib/server/websearch/runWebSearch.ts/0 | {
"file_path": "chat-ui/src/lib/server/websearch/runWebSearch.ts",
"repo_id": "chat-ui",
"token_count": 1565
} | 46 |
import type { Session } from "./Session";
import type { Timestamps } from "./Timestamps";
import type { User } from "./User";
export interface MessageEvent extends Pick<Timestamps, "createdAt"> {
userId: User["_id"] | Session["sessionId"];
ip?: string;
}
| chat-ui/src/lib/types/MessageEvent.ts/0 | {
"file_path": "chat-ui/src/lib/types/MessageEvent.ts",
"repo_id": "chat-ui",
"token_count": 80
} | 47 |
export function deepestChild(el: HTMLElement): HTMLElement {
if (el.lastElementChild && el.lastElementChild.nodeType !== Node.TEXT_NODE) {
return deepestChild(el.lastElementChild as HTMLElement);
}
return el;
}
| chat-ui/src/lib/utils/deepestChild.ts/0 | {
"file_path": "chat-ui/src/lib/utils/deepestChild.ts",
"repo_id": "chat-ui",
"token_count": 74
} | 48 |
<script lang="ts">
import { onDestroy } from "svelte";
import { goto, invalidate } from "$app/navigation";
import { page } from "$app/stores";
import "../styles/main.css";
import { base } from "$app/paths";
import { PUBLIC_APP_DESCRIPTION, PUBLIC_ORIGIN } from "$env/static/public";
import { shareConversation } from "$lib/shareConversation";
import { UrlDependency } from "$lib/types/UrlDependency";
import { error } from "$lib/stores/errors";
import MobileNav from "$lib/components/MobileNav.svelte";
import NavMenu from "$lib/components/NavMenu.svelte";
import Toast from "$lib/components/Toast.svelte";
import { PUBLIC_APP_ASSETS, PUBLIC_APP_NAME } from "$env/static/public";
import titleUpdate from "$lib/stores/titleUpdate";
import { createSettingsStore } from "$lib/stores/settings";
import { browser } from "$app/environment";
import DisclaimerModal from "$lib/components/DisclaimerModal.svelte";
export let data;
let isNavOpen = false;
let errorToastTimeout: ReturnType<typeof setTimeout>;
let currentError: string | null;
async function onError() {
// If a new different error comes, wait for the current error to hide first
if ($error && currentError && $error !== currentError) {
clearTimeout(errorToastTimeout);
currentError = null;
await new Promise((resolve) => setTimeout(resolve, 300));
}
currentError = $error;
errorToastTimeout = setTimeout(() => {
$error = null;
currentError = null;
}, 3000);
}
async function deleteConversation(id: string) {
try {
const res = await fetch(`${base}/conversation/${id}`, {
method: "DELETE",
headers: {
"Content-Type": "application/json",
},
});
if (!res.ok) {
$error = "Error while deleting conversation, try again.";
return;
}
if ($page.params.id !== id) {
await invalidate(UrlDependency.ConversationList);
} else {
await goto(`${base}/`, { invalidateAll: true });
}
} catch (err) {
console.error(err);
$error = String(err);
}
}
async function editConversationTitle(id: string, title: string) {
try {
const res = await fetch(`${base}/conversation/${id}`, {
method: "PATCH",
headers: {
"Content-Type": "application/json",
},
body: JSON.stringify({ title }),
});
if (!res.ok) {
$error = "Error while editing title, try again.";
return;
}
await invalidate(UrlDependency.ConversationList);
} catch (err) {
console.error(err);
$error = String(err);
}
}
onDestroy(() => {
clearTimeout(errorToastTimeout);
});
$: if ($error) onError();
$: if ($titleUpdate) {
const convIdx = data.conversations.findIndex(({ id }) => id === $titleUpdate?.convId);
if (convIdx != -1) {
data.conversations[convIdx].title = $titleUpdate?.title ?? data.conversations[convIdx].title;
}
// update data.conversations
data.conversations = [...data.conversations];
$titleUpdate = null;
}
const settings = createSettingsStore(data.settings);
$: if (browser && $page.url.searchParams.has("model")) {
if ($settings.activeModel === $page.url.searchParams.get("model")) {
goto(`${base}/?`);
}
$settings.activeModel = $page.url.searchParams.get("model") ?? $settings.activeModel;
}
</script>
<svelte:head>
<title>{PUBLIC_APP_NAME}</title>
<meta name="description" content="The first open source alternative to ChatGPT. 💪" />
<meta name="twitter:card" content="summary_large_image" />
<meta name="twitter:site" content="@huggingface" />
<!-- use those meta tags everywhere except on the share assistant page -->
<!-- feel free to refacto if there's a better way -->
{#if !$page.url.pathname.includes("/assistant/") && $page.route.id !== "/assistants"}
<meta property="og:title" content={PUBLIC_APP_NAME} />
<meta property="og:type" content="website" />
<meta property="og:url" content="{PUBLIC_ORIGIN || $page.url.origin}{base}" />
<meta
property="og:image"
content="{PUBLIC_ORIGIN || $page.url.origin}{base}/{PUBLIC_APP_ASSETS}/thumbnail.png"
/>
<meta property="og:description" content={PUBLIC_APP_DESCRIPTION} />
{/if}
<link
rel="icon"
href="{PUBLIC_ORIGIN || $page.url.origin}{base}/{PUBLIC_APP_ASSETS}/favicon.ico"
sizes="32x32"
/>
<link
rel="icon"
href="{PUBLIC_ORIGIN || $page.url.origin}{base}/{PUBLIC_APP_ASSETS}/icon.svg"
type="image/svg+xml"
/>
<link
rel="apple-touch-icon"
href="{PUBLIC_ORIGIN || $page.url.origin}{base}/{PUBLIC_APP_ASSETS}/apple-touch-icon.png"
/>
<link
rel="manifest"
href="{PUBLIC_ORIGIN || $page.url.origin}{base}/{PUBLIC_APP_ASSETS}/manifest.json"
/>
</svelte:head>
{#if !$settings.ethicsModalAccepted}
<DisclaimerModal />
{/if}
<div
class="grid h-full w-screen grid-cols-1 grid-rows-[auto,1fr] overflow-hidden text-smd md:grid-cols-[280px,1fr] md:grid-rows-[1fr] dark:text-gray-300"
>
<MobileNav
isOpen={isNavOpen}
on:toggle={(ev) => (isNavOpen = ev.detail)}
title={data.conversations.find((conv) => conv.id === $page.params.id)?.title}
>
<NavMenu
conversations={data.conversations}
user={data.user}
canLogin={data.user === undefined && data.loginEnabled}
on:shareConversation={(ev) => shareConversation(ev.detail.id, ev.detail.title)}
on:deleteConversation={(ev) => deleteConversation(ev.detail)}
on:editConversationTitle={(ev) => editConversationTitle(ev.detail.id, ev.detail.title)}
/>
</MobileNav>
<nav class="grid max-h-screen grid-cols-1 grid-rows-[auto,1fr,auto] max-md:hidden">
<NavMenu
conversations={data.conversations}
user={data.user}
canLogin={data.user === undefined && data.loginEnabled}
on:shareConversation={(ev) => shareConversation(ev.detail.id, ev.detail.title)}
on:deleteConversation={(ev) => deleteConversation(ev.detail)}
on:editConversationTitle={(ev) => editConversationTitle(ev.detail.id, ev.detail.title)}
/>
</nav>
{#if currentError}
<Toast message={currentError} />
{/if}
<slot />
</div>
| chat-ui/src/routes/+layout.svelte/0 | {
"file_path": "chat-ui/src/routes/+layout.svelte",
"repo_id": "chat-ui",
"token_count": 2291
} | 49 |
import { MESSAGES_BEFORE_LOGIN, RATE_LIMIT } from "$env/static/private";
import { authCondition, requiresUser } from "$lib/server/auth";
import { collections } from "$lib/server/database";
import { models } from "$lib/server/models";
import { ERROR_MESSAGES } from "$lib/stores/errors";
import type { Message } from "$lib/types/Message";
import { error } from "@sveltejs/kit";
import { ObjectId } from "mongodb";
import { z } from "zod";
import type { MessageUpdate } from "$lib/types/MessageUpdate";
import { runWebSearch } from "$lib/server/websearch/runWebSearch";
import type { WebSearch } from "$lib/types/WebSearch";
import { abortedGenerations } from "$lib/server/abortedGenerations";
import { summarize } from "$lib/server/summarize";
import { uploadFile } from "$lib/server/files/uploadFile";
import sizeof from "image-size";
export async function POST({ request, locals, params, getClientAddress }) {
const id = z.string().parse(params.id);
const convId = new ObjectId(id);
const promptedAt = new Date();
const userId = locals.user?._id ?? locals.sessionId;
// check user
if (!userId) {
throw error(401, "Unauthorized");
}
// check if the user has access to the conversation
const conv = await collections.conversations.findOne({
_id: convId,
...authCondition(locals),
});
if (!conv) {
throw error(404, "Conversation not found");
}
// register the event for ratelimiting
await collections.messageEvents.insertOne({
userId,
createdAt: new Date(),
ip: getClientAddress(),
});
// guest mode check
if (
!locals.user?._id &&
requiresUser &&
(MESSAGES_BEFORE_LOGIN ? parseInt(MESSAGES_BEFORE_LOGIN) : 0) > 0
) {
const totalMessages =
(
await collections.conversations
.aggregate([
{ $match: authCondition(locals) },
{ $project: { messages: 1 } },
{ $unwind: "$messages" },
{ $match: { "messages.from": "assistant" } },
{ $count: "messages" },
])
.toArray()
)[0]?.messages ?? 0;
if (totalMessages > parseInt(MESSAGES_BEFORE_LOGIN)) {
throw error(429, "Exceeded number of messages before login");
}
}
// check if the user is rate limited
const nEvents = Math.max(
await collections.messageEvents.countDocuments({ userId }),
await collections.messageEvents.countDocuments({ ip: getClientAddress() })
);
if (RATE_LIMIT != "" && nEvents > parseInt(RATE_LIMIT)) {
throw error(429, ERROR_MESSAGES.rateLimited);
}
// fetch the model
const model = models.find((m) => m.id === conv.model);
if (!model) {
throw error(410, "Model not available anymore");
}
// finally parse the content of the request
const json = await request.json();
const {
inputs: newPrompt,
id: messageId,
is_retry: isRetry,
is_continue: isContinue,
web_search: webSearch,
files: b64files,
} = z
.object({
inputs: z.optional(z.string().trim().min(1)),
id: z.optional(z.string().uuid()),
is_retry: z.optional(z.boolean()),
is_continue: z.optional(z.boolean()),
web_search: z.optional(z.boolean()),
files: z.optional(z.array(z.string())),
})
.parse(json);
// files is an array of base64 strings encoding Blob objects
// we need to convert this array to an array of File objects
const files = b64files?.map((file) => {
const blob = Buffer.from(file, "base64");
return new File([blob], "image.png");
});
// check sizes
if (files) {
const filechecks = await Promise.all(
files.map(async (file) => {
const dimensions = sizeof(Buffer.from(await file.arrayBuffer()));
return (
file.size > 2 * 1024 * 1024 ||
(dimensions.width ?? 0) > 224 ||
(dimensions.height ?? 0) > 224
);
})
);
if (filechecks.some((check) => check)) {
throw error(413, "File too large, should be <2MB and 224x224 max.");
}
}
let hashes: undefined | string[];
if (files) {
hashes = await Promise.all(files.map(async (file) => await uploadFile(file, conv)));
}
// can only call isContinue on the last message id
if (isContinue && conv.messages[conv.messages.length - 1].id !== messageId) {
throw error(400, "Can only continue the last message");
}
// get the list of messages
// while checking for retries
let messages = (() => {
// for retries we slice and rewrite the last user message
if (isRetry && messageId) {
// if the message is a retry, replace the message and remove the messages after it
let retryMessageIdx = conv.messages.findIndex((message) => message.id === messageId);
if (retryMessageIdx === -1) {
retryMessageIdx = conv.messages.length;
}
return [
...conv.messages.slice(0, retryMessageIdx),
{
content: conv.messages[retryMessageIdx]?.content,
from: "user",
id: messageId as Message["id"],
updatedAt: new Date(),
files: conv.messages[retryMessageIdx]?.files,
},
];
} else if (isContinue && messageId) {
// for continue we do nothing and expand the last assistant message
return conv.messages;
} else {
// in normal conversation we add an extra user message
return [
...conv.messages,
{
content: newPrompt ?? "",
from: "user",
id: (messageId as Message["id"]) || crypto.randomUUID(),
createdAt: new Date(),
updatedAt: new Date(),
files: hashes,
},
];
} // else append the message at the bottom
})() satisfies Message[];
await collections.conversations.updateOne(
{
_id: convId,
},
{
$set: {
messages,
title: conv.title,
updatedAt: new Date(),
},
}
);
let doneStreaming = false;
// we now build the stream
const stream = new ReadableStream({
async start(controller) {
const updates: MessageUpdate[] = isContinue
? conv.messages[conv.messages.length - 1].updates ?? []
: [];
function update(newUpdate: MessageUpdate) {
if (newUpdate.type !== "stream") {
updates.push(newUpdate);
}
if (newUpdate.type === "stream" && newUpdate.token === "") {
return;
}
controller.enqueue(JSON.stringify(newUpdate) + "\n");
if (newUpdate.type === "finalAnswer") {
// 4096 of spaces to make sure the browser doesn't blocking buffer that holding the response
controller.enqueue(" ".repeat(4096));
}
}
update({ type: "status", status: "started" });
const summarizeIfNeeded = (async () => {
if (conv.title === "New Chat" && messages.length === 1) {
try {
conv.title = (await summarize(messages[0].content)) ?? conv.title;
update({ type: "status", status: "title", message: conv.title });
} catch (e) {
console.error(e);
}
}
})();
await collections.conversations.updateOne(
{
_id: convId,
},
{
$set: {
messages,
title: conv.title,
updatedAt: new Date(),
},
}
);
let webSearchResults: WebSearch | undefined;
if (webSearch && !isContinue) {
webSearchResults = await runWebSearch(conv, messages[messages.length - 1].content, update);
messages[messages.length - 1].webSearch = webSearchResults;
} else if (isContinue) {
webSearchResults = messages[messages.length - 1].webSearch;
}
conv.messages = messages;
const previousContent = isContinue
? conv.messages.find((message) => message.id === messageId)?.content ?? ""
: "";
try {
const endpoint = await model.getEndpoint();
for await (const output of await endpoint({ conversation: conv, continue: isContinue })) {
// if not generated_text is here it means the generation is not done
if (!output.generated_text) {
// else we get the next token
if (!output.token.special) {
update({
type: "stream",
token: output.token.text,
});
// if the last message is not from assistant, it means this is the first token
const lastMessage = messages[messages.length - 1];
if (lastMessage?.from !== "assistant") {
// so we create a new message
messages = [
...messages,
// id doesn't match the backend id but it's not important for assistant messages
// First token has a space at the beginning, trim it
{
from: "assistant",
content: output.token.text.trimStart(),
webSearch: webSearchResults,
updates,
id: crypto.randomUUID(),
createdAt: new Date(),
updatedAt: new Date(),
},
];
} else {
// abort check
const date = abortedGenerations.get(convId.toString());
if (date && date > promptedAt) {
break;
}
if (!output) {
break;
}
// otherwise we just concatenate tokens
lastMessage.content += output.token.text;
}
}
} else {
let interrupted = !output.token.special;
// add output.generated text to the last message
// strip end tokens from the output.generated_text
const text = (model.parameters.stop ?? []).reduce((acc: string, curr: string) => {
if (acc.endsWith(curr)) {
interrupted = false;
return acc.slice(0, acc.length - curr.length);
}
return acc;
}, output.generated_text.trimEnd());
messages = [
...messages.slice(0, -1),
{
...messages[messages.length - 1],
content: previousContent + text,
interrupted, // if its a special token it finished on its own, else it was interrupted
updates,
updatedAt: new Date(),
},
];
}
}
} catch (e) {
update({ type: "status", status: "error", message: (e as Error).message });
}
await collections.conversations.updateOne(
{
_id: convId,
},
{
$set: {
messages,
title: conv?.title,
updatedAt: new Date(),
},
}
);
// used to detect if cancel() is called bc of interrupt or just because the connection closes
doneStreaming = true;
update({
type: "finalAnswer",
text: messages[messages.length - 1].content,
});
await summarizeIfNeeded;
controller.close();
return;
},
async cancel() {
if (!doneStreaming) {
await collections.conversations.updateOne(
{
_id: convId,
},
{
$set: {
messages,
title: conv.title,
updatedAt: new Date(),
},
}
);
}
},
});
// Todo: maybe we should wait for the message to be saved before ending the response - in case of errors
return new Response(stream);
}
export async function DELETE({ locals, params }) {
const convId = new ObjectId(params.id);
const conv = await collections.conversations.findOne({
_id: convId,
...authCondition(locals),
});
if (!conv) {
throw error(404, "Conversation not found");
}
await collections.conversations.deleteOne({ _id: conv._id });
return new Response();
}
export async function PATCH({ request, locals, params }) {
const { title } = z
.object({ title: z.string().trim().min(1).max(100) })
.parse(await request.json());
const convId = new ObjectId(params.id);
const conv = await collections.conversations.findOne({
_id: convId,
...authCondition(locals),
});
if (!conv) {
throw error(404, "Conversation not found");
}
await collections.conversations.updateOne(
{
_id: convId,
},
{
$set: {
title,
},
}
);
return new Response();
}
| chat-ui/src/routes/conversation/[id]/+server.ts/0 | {
"file_path": "chat-ui/src/routes/conversation/[id]/+server.ts",
"repo_id": "chat-ui",
"token_count": 4523
} | 50 |
<script lang="ts">
import { createEventDispatcher } from "svelte";
import Modal from "$lib/components/Modal.svelte";
import CarbonClose from "~icons/carbon/close";
import CarbonTrashCan from "~icons/carbon/trash-can";
import CarbonArrowUpRight from "~icons/carbon/arrow-up-right";
import { enhance } from "$app/forms";
import { base } from "$app/paths";
import { useSettingsStore } from "$lib/stores/settings";
import Switch from "$lib/components/Switch.svelte";
import { PUBLIC_APP_DATA_SHARING } from "$env/static/public";
let isConfirmingDeletion = false;
const dispatch = createEventDispatcher<{ close: void }>();
let settings = useSettingsStore();
</script>
<div class="flex w-full flex-col gap-5">
<div class="flex items-start justify-between text-xl font-semibold text-gray-800">
<h2>Application Settings</h2>
</div>
<div class="flex h-full flex-col gap-4 pt-4 max-sm:pt-0">
{#if PUBLIC_APP_DATA_SHARING === "1"}
<!-- svelte-ignore a11y-label-has-associated-control -->
<label class="flex items-center">
<Switch
name="shareConversationsWithModelAuthors"
bind:checked={$settings.shareConversationsWithModelAuthors}
/>
<div class="inline cursor-pointer select-none items-center gap-2 pl-2">
Share conversations with model authors
</div>
</label>
<p class="text-sm text-gray-500">
Sharing your data will help improve the training data and make open models better over time.
</p>
{/if}
<!-- svelte-ignore a11y-label-has-associated-control -->
<label class="mt-6 flex items-center">
<Switch name="hideEmojiOnSidebar" bind:checked={$settings.hideEmojiOnSidebar} />
<div class="inline cursor-pointer select-none items-center gap-2 pl-2">
Hide emoticons in conversation topics
</div>
</label>
<div class="mt-12 flex flex-col gap-3">
<a
href="https://huggingface.co/spaces/huggingchat/chat-ui/discussions"
target="_blank"
rel="noreferrer"
class="flex items-center underline decoration-gray-300 underline-offset-2 hover:decoration-gray-700"
><CarbonArrowUpRight class="mr-1.5 shrink-0 text-sm " /> Share your feedback on HuggingChat</a
>
<button
on:click|preventDefault={() => (isConfirmingDeletion = true)}
type="submit"
class="flex items-center underline decoration-gray-300 underline-offset-2 hover:decoration-gray-700"
><CarbonTrashCan class="mr-2 inline text-sm text-red-500" />Delete all conversations</button
>
</div>
</div>
{#if isConfirmingDeletion}
<Modal on:close={() => (isConfirmingDeletion = false)}>
<form
use:enhance={() => {
dispatch("close");
}}
method="post"
action="{base}/conversations?/delete"
class="flex w-full flex-col gap-5 p-6"
>
<div class="flex items-start justify-between text-xl font-semibold text-gray-800">
<h2>Are you sure?</h2>
<button
type="button"
class="group"
on:click|stopPropagation={() => (isConfirmingDeletion = false)}
>
<CarbonClose class="text-gray-900 group-hover:text-gray-500" />
</button>
</div>
<p class="text-gray-800">
This action will delete all your conversations. This cannot be undone.
</p>
<button
type="submit"
class="mt-2 rounded-full bg-red-700 px-5 py-2 text-lg font-semibold text-gray-100 ring-gray-400 ring-offset-1 transition-all focus-visible:outline-none focus-visible:ring hover:ring"
>
Confirm deletion
</button>
</form>
</Modal>
{/if}
</div>
| chat-ui/src/routes/settings/+page.svelte/0 | {
"file_path": "chat-ui/src/routes/settings/+page.svelte",
"repo_id": "chat-ui",
"token_count": 1373
} | 51 |
cff-version: 1.2.0
message: "If you use this software, please cite it as below."
title: "huggingface/datasets"
authors:
- family-names: Lhoest
given-names: Quentin
- family-names: Villanova del Moral
given-names: Albert
orcid: "https://orcid.org/0000-0003-1727-1045"
- family-names: von Platen
given-names: Patrick
- family-names: Wolf
given-names: Thomas
- family-names: Šaško
given-names: Mario
- family-names: Jernite
given-names: Yacine
- family-names: Thakur
given-names: Abhishek
- family-names: Tunstall
given-names: Lewis
- family-names: Patil
given-names: Suraj
- family-names: Drame
given-names: Mariama
- family-names: Chaumond
given-names: Julien
- family-names: Plu
given-names: Julien
- family-names: Davison
given-names: Joe
- family-names: Brandeis
given-names: Simon
- family-names: Sanh
given-names: Victor
- family-names: Le Scao
given-names: Teven
- family-names: Canwen Xu
given-names: Kevin
- family-names: Patry
given-names: Nicolas
- family-names: Liu
given-names: Steven
- family-names: McMillan-Major
given-names: Angelina
- family-names: Schmid
given-names: Philipp
- family-names: Gugger
given-names: Sylvain
- family-names: Raw
given-names: Nathan
- family-names: Lesage
given-names: Sylvain
- family-names: Lozhkov
given-names: Anton
- family-names: Carrigan
given-names: Matthew
- family-names: Matussière
given-names: Théo
- family-names: von Werra
given-names: Leandro
- family-names: Debut
given-names: Lysandre
- family-names: Bekman
given-names: Stas
- family-names: Delangue
given-names: Clément
doi: 10.5281/zenodo.4817768
repository-code: "https://github.com/huggingface/datasets"
license: Apache-2.0
preferred-citation:
type: conference-paper
title: "Datasets: A Community Library for Natural Language Processing"
authors:
- family-names: Lhoest
given-names: Quentin
- family-names: Villanova del Moral
given-names: Albert
orcid: "https://orcid.org/0000-0003-1727-1045"
- family-names: von Platen
given-names: Patrick
- family-names: Wolf
given-names: Thomas
- family-names: Šaško
given-names: Mario
- family-names: Jernite
given-names: Yacine
- family-names: Thakur
given-names: Abhishek
- family-names: Tunstall
given-names: Lewis
- family-names: Patil
given-names: Suraj
- family-names: Drame
given-names: Mariama
- family-names: Chaumond
given-names: Julien
- family-names: Plu
given-names: Julien
- family-names: Davison
given-names: Joe
- family-names: Brandeis
given-names: Simon
- family-names: Sanh
given-names: Victor
- family-names: Le Scao
given-names: Teven
- family-names: Canwen Xu
given-names: Kevin
- family-names: Patry
given-names: Nicolas
- family-names: Liu
given-names: Steven
- family-names: McMillan-Major
given-names: Angelina
- family-names: Schmid
given-names: Philipp
- family-names: Gugger
given-names: Sylvain
- family-names: Raw
given-names: Nathan
- family-names: Lesage
given-names: Sylvain
- family-names: Lozhkov
given-names: Anton
- family-names: Carrigan
given-names: Matthew
- family-names: Matussière
given-names: Théo
- family-names: von Werra
given-names: Leandro
- family-names: Debut
given-names: Lysandre
- family-names: Bekman
given-names: Stas
- family-names: Delangue
given-names: Clément
collection-title: "Proceedings of the 2021 Conference on Empirical Methods in Natural Language Processing: System Demonstrations"
collection-type: proceedings
month: 11
year: 2021
publisher:
name: "Association for Computational Linguistics"
url: "https://aclanthology.org/2021.emnlp-demo.21"
start: 175
end: 184
identifiers:
- type: other
value: "arXiv:2109.02846"
description: "The arXiv preprint of the paper"
| datasets/CITATION.cff/0 | {
"file_path": "datasets/CITATION.cff",
"repo_id": "datasets",
"token_count": 1428
} | 52 |
# Know your dataset
There are two types of dataset objects, a regular [`Dataset`] and then an ✨ [`IterableDataset`] ✨. A [`Dataset`] provides fast random access to the rows, and memory-mapping so that loading even large datasets only uses a relatively small amount of device memory. But for really, really big datasets that won't even fit on disk or in memory, an [`IterableDataset`] allows you to access and use the dataset without waiting for it to download completely!
This tutorial will show you how to load and access a [`Dataset`] and an [`IterableDataset`].
## Dataset
When you load a dataset split, you'll get a [`Dataset`] object. You can do many things with a [`Dataset`] object, which is why it's important to learn how to manipulate and interact with the data stored inside.
This tutorial uses the [rotten_tomatoes](https://huggingface.co/datasets/rotten_tomatoes) dataset, but feel free to load any dataset you'd like and follow along!
```py
>>> from datasets import load_dataset
>>> dataset = load_dataset("rotten_tomatoes", split="train")
```
### Indexing
A [`Dataset`] contains columns of data, and each column can be a different type of data. The *index*, or axis label, is used to access examples from the dataset. For example, indexing by the row returns a dictionary of an example from the dataset:
```py
# Get the first row in the dataset
>>> dataset[0]
{'label': 1,
'text': 'the rock is destined to be the 21st century\'s new " conan " and that he\'s going to make a splash even greater than arnold schwarzenegger , jean-claud van damme or steven segal .'}
```
Use the `-` operator to start from the end of the dataset:
```py
# Get the last row in the dataset
>>> dataset[-1]
{'label': 0,
'text': 'things really get weird , though not particularly scary : the movie is all portent and no content .'}
```
Indexing by the column name returns a list of all the values in the column:
```py
>>> dataset["text"]
['the rock is destined to be the 21st century\'s new " conan " and that he\'s going to make a splash even greater than arnold schwarzenegger , jean-claud van damme or steven segal .',
'the gorgeously elaborate continuation of " the lord of the rings " trilogy is so huge that a column of words cannot adequately describe co-writer/director peter jackson\'s expanded vision of j . r . r . tolkien\'s middle-earth .',
'effective but too-tepid biopic',
...,
'things really get weird , though not particularly scary : the movie is all portent and no content .']
```
You can combine row and column name indexing to return a specific value at a position:
```py
>>> dataset[0]["text"]
'the rock is destined to be the 21st century\'s new " conan " and that he\'s going to make a splash even greater than arnold schwarzenegger , jean-claud van damme or steven segal .'
```
But it is important to remember that indexing order matters, especially when working with large audio and image datasets. Indexing by the column name returns all the values in the column first, then loads the value at that position. For large datasets, it may be slower to index by the column name first.
```py
>>> import time
>>> start_time = time.time()
>>> text = dataset[0]["text"]
>>> end_time = time.time()
>>> print(f"Elapsed time: {end_time - start_time:.4f} seconds")
Elapsed time: 0.0031 seconds
>>> start_time = time.time()
>>> text = dataset["text"][0]
>>> end_time = time.time()
>>> print(f"Elapsed time: {end_time - start_time:.4f} seconds")
Elapsed time: 0.0094 seconds
```
### Slicing
Slicing returns a slice - or subset - of the dataset, which is useful for viewing several rows at once. To slice a dataset, use the `:` operator to specify a range of positions.
```py
# Get the first three rows
>>> dataset[:3]
{'label': [1, 1, 1],
'text': ['the rock is destined to be the 21st century\'s new " conan " and that he\'s going to make a splash even greater than arnold schwarzenegger , jean-claud van damme or steven segal .',
'the gorgeously elaborate continuation of " the lord of the rings " trilogy is so huge that a column of words cannot adequately describe co-writer/director peter jackson\'s expanded vision of j . r . r . tolkien\'s middle-earth .',
'effective but too-tepid biopic']}
# Get rows between three and six
>>> dataset[3:6]
{'label': [1, 1, 1],
'text': ['if you sometimes like to go to the movies to have fun , wasabi is a good place to start .',
"emerges as something rare , an issue movie that's so honest and keenly observed that it doesn't feel like one .",
'the film provides some great insight into the neurotic mindset of all comics -- even those who have reached the absolute top of the game .']}
```
## IterableDataset
An [`IterableDataset`] is loaded when you set the `streaming` parameter to `True` in [`~datasets.load_dataset`]:
```py
>>> from datasets import load_dataset
>>> iterable_dataset = load_dataset("food101", split="train", streaming=True)
>>> for example in iterable_dataset:
... print(example)
... break
{'image': <PIL.JpegImagePlugin.JpegImageFile image mode=RGB size=384x512 at 0x7F0681F5C520>, 'label': 6}
```
You can also create an [`IterableDataset`] from an *existing* [`Dataset`], but it is faster than streaming mode because the dataset is streamed from local files:
```py
>>> from datasets import load_dataset
>>> dataset = load_dataset("rotten_tomatoes", split="train")
>>> iterable_dataset = dataset.to_iterable_dataset()
```
An [`IterableDataset`] progressively iterates over a dataset one example at a time, so you don't have to wait for the whole dataset to download before you can use it. As you can imagine, this is quite useful for large datasets you want to use immediately!
However, this means an [`IterableDataset`]'s behavior is different from a regular [`Dataset`]. You don't get random access to examples in an [`IterableDataset`]. Instead, you should iterate over its elements, for example, by calling `next(iter())` or with a `for` loop to return the next item from the [`IterableDataset`]:
```py
>>> next(iter(iterable_dataset))
{'image': <PIL.JpegImagePlugin.JpegImageFile image mode=RGB size=384x512 at 0x7F0681F59B50>,
'label': 6}
>>> for example in iterable_dataset:
... print(example)
... break
{'image': <PIL.JpegImagePlugin.JpegImageFile image mode=RGB size=384x512 at 0x7F7479DE82B0>, 'label': 6}
```
You can return a subset of the dataset with a specific number of examples in it with [`IterableDataset.take`]:
```py
# Get first three examples
>>> list(iterable_dataset.take(3))
[{'image': <PIL.JpegImagePlugin.JpegImageFile image mode=RGB size=384x512 at 0x7F7479DEE9D0>,
'label': 6},
{'image': <PIL.JpegImagePlugin.JpegImageFile image mode=RGB size=512x512 at 0x7F7479DE8190>,
'label': 6},
{'image': <PIL.JpegImagePlugin.JpegImageFile image mode=RGB size=512x383 at 0x7F7479DE8310>,
'label': 6}]
```
But unlike [slicing](access/#slicing), [`IterableDataset.take`] creates a new [`IterableDataset`].
## Next steps
Interested in learning more about the differences between these two types of datasets? Learn more about them in the [Differences between `Dataset` and `IterableDataset`](about_mapstyle_vs_iterable) conceptual guide.
To get more hands-on with these datasets types, check out the [Process](process) guide to learn how to preprocess a [`Dataset`] or the [Stream](stream) guide to learn how to preprocess an [`IterableDataset`].
| datasets/docs/source/access.mdx/0 | {
"file_path": "datasets/docs/source/access.mdx",
"repo_id": "datasets",
"token_count": 2274
} | 53 |
# Load image data
Image datasets have [`Image`] type columns, which contain PIL objects.
<Tip>
To work with image datasets, you need to have the `vision` dependency installed. Check out the [installation](./installation#vision) guide to learn how to install it.
</Tip>
When you load an image dataset and call the image column, the images are decoded as PIL Images:
```py
>>> from datasets import load_dataset, Image
>>> dataset = load_dataset("beans", split="train")
>>> dataset[0]["image"]
```
<Tip warning={true}>
Index into an image dataset using the row index first and then the `image` column - `dataset[0]["image"]` - to avoid decoding and resampling all the image objects in the dataset. Otherwise, this can be a slow and time-consuming process if you have a large dataset.
</Tip>
For a guide on how to load any type of dataset, take a look at the <a class="underline decoration-sky-400 decoration-2 font-semibold" href="./loading">general loading guide</a>.
## Local files
You can load a dataset from the image path. Use the [`~Dataset.cast_column`] function to accept a column of image file paths, and decode it into a PIL image with the [`Image`] feature:
```py
>>> from datasets import Dataset, Image
>>> dataset = Dataset.from_dict({"image": ["path/to/image_1", "path/to/image_2", ..., "path/to/image_n"]}).cast_column("image", Image())
>>> dataset[0]["image"]
<PIL.PngImagePlugin.PngImageFile image mode=RGBA size=1200x215 at 0x15E6D7160>]
```
If you only want to load the underlying path to the image dataset without decoding the image object, set `decode=False` in the [`Image`] feature:
```py
>>> dataset = load_dataset("beans", split="train").cast_column("image", Image(decode=False))
>>> dataset[0]["image"]
{'bytes': None,
'path': '/root/.cache/huggingface/datasets/downloads/extracted/b0a21163f78769a2cf11f58dfc767fb458fc7cea5c05dccc0144a2c0f0bc1292/train/bean_rust/bean_rust_train.29.jpg'}
```
## ImageFolder
You can also load a dataset with an `ImageFolder` dataset builder which does not require writing a custom dataloader. This makes `ImageFolder` ideal for quickly creating and loading image datasets with several thousand images for different vision tasks. Your image dataset structure should look like this:
```
folder/train/dog/golden_retriever.png
folder/train/dog/german_shepherd.png
folder/train/dog/chihuahua.png
folder/train/cat/maine_coon.png
folder/train/cat/bengal.png
folder/train/cat/birman.png
```
Load your dataset by specifying `imagefolder` and the directory of your dataset in `data_dir`:
```py
>>> from datasets import load_dataset
>>> dataset = load_dataset("imagefolder", data_dir="/path/to/folder")
>>> dataset["train"][0]
{"image": <PIL.PngImagePlugin.PngImageFile image mode=RGBA size=1200x215 at 0x15E6D7160>, "label": 0}
>>> dataset["train"][-1]
{"image": <PIL.PngImagePlugin.PngImageFile image mode=RGBA size=1200x215 at 0x15E8DAD30>, "label": 1}
```
Load remote datasets from their URLs with the `data_files` parameter:
```py
>>> dataset = load_dataset("imagefolder", data_files="https://download.microsoft.com/download/3/E/1/3E1C3F21-ECDB-4869-8368-6DEBA77B919F/kagglecatsanddogs_3367a.zip", split="train")
```
Some datasets have a metadata file (`metadata.csv`/`metadata.jsonl`) associated with it, containing other information about the data like bounding boxes, text captions, and labels. The metadata is automatically loaded when you call [`load_dataset`] and specify `imagefolder`.
To ignore the information in the metadata file, set `drop_labels=False` in [`load_dataset`], and allow `ImageFolder` to automatically infer the label name from the directory name:
```py
>>> from datasets import load_dataset
>>> dataset = load_dataset("imagefolder", data_dir="/path/to/folder", drop_labels=False)
```
<Tip>
For more information about creating your own `ImageFolder` dataset, take a look at the [Create an image dataset](./image_dataset) guide.
</Tip>
## WebDataset
The [WebDataset](https://github.com/webdataset/webdataset) format is based on a folder of TAR archives and is suitable for big image datasets.
Because of their size, WebDatasets are generally loaded in streaming mode (using `streaming=True`).
You can load a WebDataset like this:
```python
>>> from datasets import load_dataset
>>> dataset = load_dataset("webdataset", data_dir="/path/to/folder", streaming=True)
```
| datasets/docs/source/image_load.mdx/0 | {
"file_path": "datasets/docs/source/image_load.mdx",
"repo_id": "datasets",
"token_count": 1389
} | 54 |
# Task templates
<Tip warning={true}>
The Task API is deprecated in favor of [`train-eval-index`](https://github.com/huggingface/hub-docs/blob/9ab2555e1c146122056aba6f89af404a8bc9a6f1/datasetcard.md?plain=1#L90-L106) and will be removed in the next major release.
</Tip>
The tasks supported by [`Dataset.prepare_for_task`] and [`DatasetDict.prepare_for_task`].
[[autodoc]] datasets.tasks.AutomaticSpeechRecognition
[[autodoc]] datasets.tasks.AudioClassification
[[autodoc]] datasets.tasks.ImageClassification
- align_with_features
[[autodoc]] datasets.tasks.LanguageModeling
[[autodoc]] datasets.tasks.QuestionAnsweringExtractive
[[autodoc]] datasets.tasks.Summarization
[[autodoc]] datasets.tasks.TextClassification
- align_with_features
| datasets/docs/source/package_reference/task_templates.mdx/0 | {
"file_path": "datasets/docs/source/package_reference/task_templates.mdx",
"repo_id": "datasets",
"token_count": 277
} | 55 |
# Using Datasets with TensorFlow
This document is a quick introduction to using `datasets` with TensorFlow, with a particular focus on how to get
`tf.Tensor` objects out of our datasets, and how to stream data from Hugging Face `Dataset` objects to Keras methods
like `model.fit()`.
## Dataset format
By default, datasets return regular Python objects: integers, floats, strings, lists, etc.
To get TensorFlow tensors instead, you can set the format of the dataset to `tf`:
```py
>>> from datasets import Dataset
>>> data = [[1, 2],[3, 4]]
>>> ds = Dataset.from_dict({"data": data})
>>> ds = ds.with_format("tf")
>>> ds[0]
{'data': <tf.Tensor: shape=(2,), dtype=int64, numpy=array([1, 2])>}
>>> ds[:2]
{'data': <tf.Tensor: shape=(2, 2), dtype=int64, numpy=
array([[1, 2],
[3, 4]])>}
```
<Tip>
A [`Dataset`] object is a wrapper of an Arrow table, which allows fast reads from arrays in the dataset to TensorFlow tensors.
</Tip>
This can be useful for converting your dataset to a dict of `Tensor` objects, or for writing a generator to load TF
samples from it. If you wish to convert the entire dataset to `Tensor`, simply query the full dataset:
```py
>>> ds[:]
{'data': <tf.Tensor: shape=(2, 2), dtype=int64, numpy=
array([[1, 2],
[3, 4]])>}
```
## N-dimensional arrays
If your dataset consists of N-dimensional arrays, you will see that by default they are considered as nested lists.
In particular, a TensorFlow formatted dataset outputs a `RaggedTensor` instead of a single tensor:
```py
>>> from datasets import Dataset
>>> data = [[[1, 2],[3, 4]],[[5, 6],[7, 8]]]
>>> ds = Dataset.from_dict({"data": data})
>>> ds = ds.with_format("tf")
>>> ds[0]
{'data': <tf.RaggedTensor [[1, 2], [3, 4]]>}
```
To get a single tensor, you must explicitly use the [`Array`] feature type and specify the shape of your tensors:
```py
>>> from datasets import Dataset, Features, Array2D
>>> data = [[[1, 2],[3, 4]],[[5, 6],[7, 8]]]
>>> features = Features({"data": Array2D(shape=(2, 2), dtype='int32')})
>>> ds = Dataset.from_dict({"data": data}, features=features)
>>> ds = ds.with_format("tf")
>>> ds[0]
{'data': <tf.Tensor: shape=(2, 2), dtype=int64, numpy=
array([[1, 2],
[3, 4]])>}
>>> ds[:2]
{'data': <tf.Tensor: shape=(2, 2, 2), dtype=int64, numpy=
array([[[1, 2],
[3, 4]],
[[5, 6],
[7, 8]]])>}
```
## Other feature types
[`ClassLabel`] data are properly converted to tensors:
```py
>>> from datasets import Dataset, Features, ClassLabel
>>> labels = [0, 0, 1]
>>> features = Features({"label": ClassLabel(names=["negative", "positive"])})
>>> ds = Dataset.from_dict({"label": labels}, features=features)
>>> ds = ds.with_format("tf")
>>> ds[:3]
{'label': <tf.Tensor: shape=(3,), dtype=int64, numpy=array([0, 0, 1])>}
```
Strings and binary objects are also supported:
```py
>>> from datasets import Dataset, Features
>>> text = ["foo", "bar"]
>>> data = [0, 1]
>>> ds = Dataset.from_dict({"text": text, "data": data})
>>> ds = ds.with_format("tf")
>>> ds[:2]
{'text': <tf.Tensor: shape=(2,), dtype=string, numpy=array([b'foo', b'bar'], dtype=object)>,
'data': <tf.Tensor: shape=(2,), dtype=int64, numpy=array([0, 1])>}
```
You can also explicitly format certain columns and leave the other columns unformatted:
```py
>>> ds = ds.with_format("tf", columns=["data"], output_all_columns=True)
>>> ds[:2]
{'data': <tf.Tensor: shape=(2,), dtype=int64, numpy=array([0, 1])>,
'text': ['foo', 'bar']}
```
String and binary objects are unchanged, since PyTorch only supports numbers.
The [`Image`] and [`Audio`] feature types are also supported.
<Tip>
To use the [`Image`] feature type, you'll need to install the `vision` extra as
`pip install datasets[vision]`.
</Tip>
```py
>>> from datasets import Dataset, Features, Audio, Image
>>> images = ["path/to/image.png"] * 10
>>> features = Features({"image": Image()})
>>> ds = Dataset.from_dict({"image": images}, features=features)
>>> ds = ds.with_format("tf")
>>> ds[0]
{'image': <tf.Tensor: shape=(512, 512, 4), dtype=uint8, numpy=
array([[[255, 215, 106, 255],
[255, 215, 106, 255],
...,
[255, 255, 255, 255],
[255, 255, 255, 255]]], dtype=uint8)>}
>>> ds[:2]
{'image': <tf.Tensor: shape=(2, 512, 512, 4), dtype=uint8, numpy=
array([[[[255, 215, 106, 255],
[255, 215, 106, 255],
...,
[255, 255, 255, 255],
[255, 255, 255, 255]]]], dtype=uint8)>}
```
<Tip>
To use the [`Audio`] feature type, you'll need to install the `audio` extra as
`pip install datasets[audio]`.
</Tip>
```py
>>> from datasets import Dataset, Features, Audio, Image
>>> audio = ["path/to/audio.wav"] * 10
>>> features = Features({"audio": Audio()})
>>> ds = Dataset.from_dict({"audio": audio}, features=features)
>>> ds = ds.with_format("tf")
>>> ds[0]["audio"]["array"]
<tf.Tensor: shape=(202311,), dtype=float32, numpy=
array([ 6.1035156e-05, 1.5258789e-05, 1.6784668e-04, ...,
-1.5258789e-05, -1.5258789e-05, 1.5258789e-05], dtype=float32)>
>>> ds[0]["audio"]["sampling_rate"]
<tf.Tensor: shape=(), dtype=int32, numpy=44100>
```
## Data loading
Although you can load individual samples and batches just by indexing into your dataset, this won't work if you want
to use Keras methods like `fit()` and `predict()`. You could write a generator function that shuffles and loads batches
from your dataset and `fit()` on that, but that sounds like a lot of unnecessary work. Instead, if you want to stream
data from your dataset on-the-fly, we recommend converting your dataset to a `tf.data.Dataset` using the
`to_tf_dataset()` method.
The `tf.data.Dataset` class covers a wide range of use-cases - it is often created from Tensors in memory, or using a load function to read files on disc
or external storage. The dataset can be transformed arbitrarily with the `map()` method, or methods like `batch()`
and `shuffle()` can be used to create a dataset that's ready for training. These methods do not modify the stored data
in any way - instead, the methods build a data pipeline graph that will be executed when the dataset is iterated over,
usually during model training or inference. This is different from the `map()` method of Hugging Face `Dataset` objects,
which runs the map function immediately and saves the new or changed columns.
Since the entire data preprocessing pipeline can be compiled in a `tf.data.Dataset`, this approach allows for massively
parallel, asynchronous data loading and training. However, the requirement for graph compilation can be a limitation,
particularly for Hugging Face tokenizers, which are usually not (yet!) compilable as part of a TF graph. As a result,
we usually advise pre-processing the dataset as a Hugging Face dataset, where arbitrary Python functions can be
used, and then converting to `tf.data.Dataset` afterwards using `to_tf_dataset()` to get a batched dataset ready for
training. To see examples of this approach, please see the [examples](https://github.com/huggingface/transformers/tree/main/examples) or [notebooks](https://huggingface.co/docs/transformers/notebooks) for `transformers`.
### Using `to_tf_dataset()`
Using `to_tf_dataset()` is straightforward. Once your dataset is preprocessed and ready, simply call it like so:
```py
>>> from datasets import Dataset
>>> data = {"inputs": [[1, 2],[3, 4]], "labels": [0, 1]}
>>> ds = Dataset.from_dict(data)
>>> tf_ds = ds.to_tf_dataset(
columns=["inputs"],
label_cols=["labels"],
batch_size=2,
shuffle=True
)
```
The returned `tf_ds` object here is now fully ready to train on, and can be passed directly to `model.fit()`. Note
that you set the batch size when creating the dataset, and so you don't need to specify it when calling `fit()`:
```py
>>> model.fit(tf_ds, epochs=2)
```
For a full description of the arguments, please see the [`~Dataset.to_tf_dataset`] documentation. In many cases,
you will also need to add a `collate_fn` to your call. This is a function that takes multiple elements of the dataset
and combines them into a single batch. When all elements have the same length, the built-in default collator will
suffice, but for more complex tasks a custom collator may be necessary. In particular, many tasks have samples
with varying sequence lengths which will require a [data collator](https://huggingface.co/docs/transformers/main/en/main_classes/data_collator) that can pad batches correctly. You can see examples
of this in the `transformers` NLP [examples](https://github.com/huggingface/transformers/tree/main/examples) and
[notebooks](https://huggingface.co/docs/transformers/notebooks), where variable sequence lengths are very common.
If you find that loading with `to_tf_dataset` is slow, you can also use the `num_workers` argument. This spins
up multiple subprocesses to load data in parallel. This feature is recent and still somewhat experimental - please file
an issue if you encounter any bugs while using it!
### When to use to_tf_dataset
The astute reader may have noticed at this point that we have offered two approaches to achieve the same goal - if you
want to pass your dataset to a TensorFlow model, you can either convert the dataset to a `Tensor` or `dict` of `Tensors`
using `.with_format('tf')`, or you can convert the dataset to a `tf.data.Dataset` with `to_tf_dataset()`. Either of these
can be passed to `model.fit()`, so which should you choose?
The key thing to recognize is that when you convert the whole dataset to `Tensor`s, it is static and fully loaded into
RAM. This is simple and convenient, but if any of the following apply, you should probably use `to_tf_dataset()`
instead:
- Your dataset is too large to fit in RAM. `to_tf_dataset()` streams only one batch at a time, so even very large
datasets can be handled with this method.
- You want to apply random transformations using `dataset.with_transform()` or the `collate_fn`. This is
common in several modalities, such as image augmentations when training vision models, or random masking when training
masked language models. Using `to_tf_dataset()` will apply those transformations
at the moment when a batch is loaded, which means the same samples will get different augmentations each time
they are loaded. This is usually what you want.
- Your data has a variable dimension, such as input texts in NLP that consist of varying
numbers of tokens. When you create a batch with samples with a variable dimension, the standard solution is to
pad the shorter samples to the length of the longest one. When you stream samples from a dataset with `to_tf_dataset`,
you can apply this padding to each batch via your `collate_fn`. However, if you want to convert
such a dataset to dense `Tensor`s, then you will have to pad samples to the length of the longest sample in *the
entire dataset!* This can result in huge amounts of padding, which wastes memory and reduces your model's speed.
### Caveats and limitations
Right now, `to_tf_dataset()` always returns a batched dataset - we will add support for unbatched datasets soon!
| datasets/docs/source/use_with_tensorflow.mdx/0 | {
"file_path": "datasets/docs/source/use_with_tensorflow.mdx",
"repo_id": "datasets",
"token_count": 3671
} | 56 |
# Copyright 2020 The HuggingFace Datasets Authors and the current dataset script contributor.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
# This code is adapted from OpenAI's release
# https://github.com/openai/human-eval/blob/master/human_eval/execution.py
import contextlib
import faulthandler
import io
import multiprocessing
import os
import platform
import signal
import tempfile
def check_correctness(check_program, timeout, task_id, completion_id):
"""
Evaluates the functional correctness of a completion by running the test
suite provided in the problem.
:param completion_id: an optional completion ID so we can match
the results later even if execution finishes asynchronously.
"""
manager = multiprocessing.Manager()
result = manager.list()
p = multiprocessing.Process(target=unsafe_execute, args=(check_program, result, timeout))
p.start()
p.join(timeout=timeout + 1)
if p.is_alive():
p.kill()
if not result:
result.append("timed out")
return {
"task_id": task_id,
"passed": result[0] == "passed",
"result": result[0],
"completion_id": completion_id,
}
def unsafe_execute(check_program, result, timeout):
with create_tempdir():
# These system calls are needed when cleaning up tempdir.
import os
import shutil
rmtree = shutil.rmtree
rmdir = os.rmdir
chdir = os.chdir
# Disable functionalities that can make destructive changes to the test.
reliability_guard()
# Run program.
try:
exec_globals = {}
with swallow_io():
with time_limit(timeout):
exec(check_program, exec_globals)
result.append("passed")
except TimeoutException:
result.append("timed out")
except BaseException as e:
result.append(f"failed: {e}")
# Needed for cleaning up.
shutil.rmtree = rmtree
os.rmdir = rmdir
os.chdir = chdir
@contextlib.contextmanager
def time_limit(seconds):
def signal_handler(signum, frame):
raise TimeoutException("Timed out!")
signal.setitimer(signal.ITIMER_REAL, seconds)
signal.signal(signal.SIGALRM, signal_handler)
try:
yield
finally:
signal.setitimer(signal.ITIMER_REAL, 0)
@contextlib.contextmanager
def swallow_io():
stream = WriteOnlyStringIO()
with contextlib.redirect_stdout(stream):
with contextlib.redirect_stderr(stream):
with redirect_stdin(stream):
yield
@contextlib.contextmanager
def create_tempdir():
with tempfile.TemporaryDirectory() as dirname:
with chdir(dirname):
yield dirname
class TimeoutException(Exception):
pass
class WriteOnlyStringIO(io.StringIO):
"""StringIO that throws an exception when it's read from"""
def read(self, *args, **kwargs):
raise OSError
def readline(self, *args, **kwargs):
raise OSError
def readlines(self, *args, **kwargs):
raise OSError
def readable(self, *args, **kwargs):
"""Returns True if the IO object can be read."""
return False
class redirect_stdin(contextlib._RedirectStream): # type: ignore
_stream = "stdin"
@contextlib.contextmanager
def chdir(root):
if root == ".":
yield
return
cwd = os.getcwd()
os.chdir(root)
try:
yield
except BaseException as exc:
raise exc
finally:
os.chdir(cwd)
def reliability_guard(maximum_memory_bytes=None):
"""
This disables various destructive functions and prevents the generated code
from interfering with the test (e.g. fork bomb, killing other processes,
removing filesystem files, etc.)
WARNING
This function is NOT a security sandbox. Untrusted code, including, model-
generated code, should not be blindly executed outside of one. See the
Codex paper for more information about OpenAI's code sandbox, and proceed
with caution.
"""
if maximum_memory_bytes is not None:
import resource
resource.setrlimit(resource.RLIMIT_AS, (maximum_memory_bytes, maximum_memory_bytes))
resource.setrlimit(resource.RLIMIT_DATA, (maximum_memory_bytes, maximum_memory_bytes))
if not platform.uname().system == "Darwin":
resource.setrlimit(resource.RLIMIT_STACK, (maximum_memory_bytes, maximum_memory_bytes))
faulthandler.disable()
import builtins
builtins.exit = None
builtins.quit = None
import os
os.environ["OMP_NUM_THREADS"] = "1"
os.kill = None
os.system = None
os.putenv = None
os.remove = None
os.removedirs = None
os.rmdir = None
os.fchdir = None
os.setuid = None
os.fork = None
os.forkpty = None
os.killpg = None
os.rename = None
os.renames = None
os.truncate = None
os.replace = None
os.unlink = None
os.fchmod = None
os.fchown = None
os.chmod = None
os.chown = None
os.chroot = None
os.fchdir = None
os.lchflags = None
os.lchmod = None
os.lchown = None
os.getcwd = None
os.chdir = None
import shutil
shutil.rmtree = None
shutil.move = None
shutil.chown = None
import subprocess
subprocess.Popen = None # type: ignore
__builtins__["help"] = None
import sys
sys.modules["ipdb"] = None
sys.modules["joblib"] = None
sys.modules["resource"] = None
sys.modules["psutil"] = None
sys.modules["tkinter"] = None
| datasets/metrics/code_eval/execute.py/0 | {
"file_path": "datasets/metrics/code_eval/execute.py",
"repo_id": "datasets",
"token_count": 2368
} | 57 |
# Metric Card for GLUE
## Metric description
This metric is used to compute the GLUE evaluation metric associated to each [GLUE dataset](https://huggingface.co/datasets/glue).
GLUE, the General Language Understanding Evaluation benchmark is a collection of resources for training, evaluating, and analyzing natural language understanding systems.
## How to use
There are two steps: (1) loading the GLUE metric relevant to the subset of the GLUE dataset being used for evaluation; and (2) calculating the metric.
1. **Loading the relevant GLUE metric** : the subsets of GLUE are the following: `sst2`, `mnli`, `mnli_mismatched`, `mnli_matched`, `qnli`, `rte`, `wnli`, `cola`,`stsb`, `mrpc`, `qqp`, and `hans`.
More information about the different subsets of the GLUE dataset can be found on the [GLUE dataset page](https://huggingface.co/datasets/glue).
2. **Calculating the metric**: the metric takes two inputs : one list with the predictions of the model to score and one lists of references for each translation.
```python
from datasets import load_metric
glue_metric = load_metric('glue', 'sst2')
references = [0, 1]
predictions = [0, 1]
results = glue_metric.compute(predictions=predictions, references=references)
```
## Output values
The output of the metric depends on the GLUE subset chosen, consisting of a dictionary that contains one or several of the following metrics:
`accuracy`: the proportion of correct predictions among the total number of cases processed, with a range between 0 and 1 (see [accuracy](https://huggingface.co/metrics/accuracy) for more information).
`f1`: the harmonic mean of the precision and recall (see [F1 score](https://huggingface.co/metrics/f1) for more information). Its range is 0-1 -- its lowest possible value is 0, if either the precision or the recall is 0, and its highest possible value is 1.0, which means perfect precision and recall.
`pearson`: a measure of the linear relationship between two datasets (see [Pearson correlation](https://huggingface.co/metrics/pearsonr) for more information). Its range is between -1 and +1, with 0 implying no correlation, and -1/+1 implying an exact linear relationship. Positive correlations imply that as x increases, so does y, whereas negative correlations imply that as x increases, y decreases.
`spearmanr`: a nonparametric measure of the monotonicity of the relationship between two datasets(see [Spearman Correlation](https://huggingface.co/metrics/spearmanr) for more information). `spearmanr` has the same range as `pearson`.
`matthews_correlation`: a measure of the quality of binary and multiclass classifications (see [Matthews Correlation](https://huggingface.co/metrics/matthews_correlation) for more information). Its range of values is between -1 and +1, where a coefficient of +1 represents a perfect prediction, 0 an average random prediction and -1 an inverse prediction.
The `cola` subset returns `matthews_correlation`, the `stsb` subset returns `pearson` and `spearmanr`, the `mrpc` and `qqp` subsets return both `accuracy` and `f1`, and all other subsets of GLUE return only accuracy.
### Values from popular papers
The [original GLUE paper](https://huggingface.co/datasets/glue) reported average scores ranging from 58 to 64%, depending on the model used (with all evaluation values scaled by 100 to make computing the average possible).
For more recent model performance, see the [dataset leaderboard](https://paperswithcode.com/dataset/glue).
## Examples
Maximal values for the MRPC subset (which outputs `accuracy` and `f1`):
```python
from datasets import load_metric
glue_metric = load_metric('glue', 'mrpc') # 'mrpc' or 'qqp'
references = [0, 1]
predictions = [0, 1]
results = glue_metric.compute(predictions=predictions, references=references)
print(results)
{'accuracy': 1.0, 'f1': 1.0}
```
Minimal values for the STSB subset (which outputs `pearson` and `spearmanr`):
```python
from datasets import load_metric
glue_metric = load_metric('glue', 'stsb')
references = [0., 1., 2., 3., 4., 5.]
predictions = [-10., -11., -12., -13., -14., -15.]
results = glue_metric.compute(predictions=predictions, references=references)
print(results)
{'pearson': -1.0, 'spearmanr': -1.0}
```
Partial match for the COLA subset (which outputs `matthews_correlation`)
```python
from datasets import load_metric
glue_metric = load_metric('glue', 'cola')
references = [0, 1]
predictions = [1, 1]
results = glue_metric.compute(predictions=predictions, references=references)
results
{'matthews_correlation': 0.0}
```
## Limitations and bias
This metric works only with datasets that have the same format as the [GLUE dataset](https://huggingface.co/datasets/glue).
While the GLUE dataset is meant to represent "General Language Understanding", the tasks represented in it are not necessarily representative of language understanding, and should not be interpreted as such.
Also, while the GLUE subtasks were considered challenging during its creation in 2019, they are no longer considered as such given the impressive progress made since then. A more complex (or "stickier") version of it, called [SuperGLUE](https://huggingface.co/datasets/super_glue), was subsequently created.
## Citation
```bibtex
@inproceedings{wang2019glue,
title={{GLUE}: A Multi-Task Benchmark and Analysis Platform for Natural Language Understanding},
author={Wang, Alex and Singh, Amanpreet and Michael, Julian and Hill, Felix and Levy, Omer and Bowman, Samuel R.},
note={In the Proceedings of ICLR.},
year={2019}
}
```
## Further References
- [GLUE benchmark homepage](https://gluebenchmark.com/)
- [Fine-tuning a model with the Trainer API](https://huggingface.co/course/chapter3/3?)
| datasets/metrics/glue/README.md/0 | {
"file_path": "datasets/metrics/glue/README.md",
"repo_id": "datasets",
"token_count": 1659
} | 58 |
# Metric Card for METEOR
## Metric description
METEOR (Metric for Evaluation of Translation with Explicit ORdering) is a machine translation evaluation metric, which is calculated based on the harmonic mean of precision and recall, with recall weighted more than precision.
METEOR is based on a generalized concept of unigram matching between the machine-produced translation and human-produced reference translations. Unigrams can be matched based on their surface forms, stemmed forms, and meanings. Once all generalized unigram matches between the two strings have been found, METEOR computes a score for this matching using a combination of unigram-precision, unigram-recall, and a measure of fragmentation that is designed to directly capture how well-ordered the matched words in the machine translation are in relation to the reference.
## How to use
METEOR has two mandatory arguments:
`predictions`: a list of predictions to score. Each prediction should be a string with tokens separated by spaces.
`references`: a list of references for each prediction. Each reference should be a string with tokens separated by spaces.
It also has several optional parameters:
`alpha`: Parameter for controlling relative weights of precision and recall. The default value is `0.9`.
`beta`: Parameter for controlling shape of penalty as a function of fragmentation. The default value is `3`.
`gamma`: The relative weight assigned to fragmentation penalty. The default is `0.5`.
Refer to the [METEOR paper](https://aclanthology.org/W05-0909.pdf) for more information about parameter values and ranges.
```python
>>> from datasets import load_metric
>>> meteor = load_metric('meteor')
>>> predictions = ["It is a guide to action which ensures that the military always obeys the commands of the party"]
>>> references = ["It is a guide to action that ensures that the military will forever heed Party commands"]
>>> results = meteor.compute(predictions=predictions, references=references)
```
## Output values
The metric outputs a dictionary containing the METEOR score. Its values range from 0 to 1.
### Values from popular papers
The [METEOR paper](https://aclanthology.org/W05-0909.pdf) does not report METEOR score values for different models, but it does report that METEOR gets an R correlation value of 0.347 with human evaluation on the Arabic data and 0.331 on the Chinese data.
## Examples
Maximal values :
```python
>>> from datasets import load_metric
>>> meteor = load_metric('meteor')
>>> predictions = ["It is a guide to action which ensures that the military always obeys the commands of the party"]
>>> references = ["It is a guide to action which ensures that the military always obeys the commands of the party"]
>>> results = meteor.compute(predictions=predictions, references=references)
>>> print(round(results['meteor'], 2))
1.0
```
Minimal values:
```python
>>> from datasets import load_metric
>>> meteor = load_metric('meteor')
>>> predictions = ["It is a guide to action which ensures that the military always obeys the commands of the party"]
>>> references = ["Hello world"]
>>> results = meteor.compute(predictions=predictions, references=references)
>>> print(round(results['meteor'], 2))
0.0
```
Partial match:
```python
>>> from datasets import load_metric
>>> meteor = load_metric('meteor')
>>> predictions = ["It is a guide to action which ensures that the military always obeys the commands of the party"]
>>> references = ["It is a guide to action that ensures that the military will forever heed Party commands"]
>>> results = meteor.compute(predictions=predictions, references=references)
>>> print(round(results['meteor'], 2))
0.69
```
## Limitations and bias
While the correlation between METEOR and human judgments was measured for Chinese and Arabic and found to be significant, further experimentation is needed to check its correlation for other languages.
Furthermore, while the alignment and matching done in METEOR is based on unigrams, using multiple word entities (e.g. bigrams) could contribute to improving its accuracy -- this has been proposed in [more recent publications](https://www.cs.cmu.edu/~alavie/METEOR/pdf/meteor-naacl-2010.pdf) on the subject.
## Citation
```bibtex
@inproceedings{banarjee2005,
title = {{METEOR}: An Automatic Metric for {MT} Evaluation with Improved Correlation with Human Judgments},
author = {Banerjee, Satanjeev and Lavie, Alon},
booktitle = {Proceedings of the {ACL} Workshop on Intrinsic and Extrinsic Evaluation Measures for Machine Translation and/or Summarization},
month = jun,
year = {2005},
address = {Ann Arbor, Michigan},
publisher = {Association for Computational Linguistics},
url = {https://www.aclweb.org/anthology/W05-0909},
pages = {65--72},
}
```
## Further References
- [METEOR -- Wikipedia](https://en.wikipedia.org/wiki/METEOR)
- [METEOR score -- NLTK](https://www.nltk.org/_modules/nltk/translate/meteor_score.html)
| datasets/metrics/meteor/README.md/0 | {
"file_path": "datasets/metrics/meteor/README.md",
"repo_id": "datasets",
"token_count": 1340
} | 59 |
# Metric Card for SacreBLEU
## Metric Description
SacreBLEU provides hassle-free computation of shareable, comparable, and reproducible BLEU scores. Inspired by Rico Sennrich's `multi-bleu-detok.perl`, it produces the official Workshop on Machine Translation (WMT) scores but works with plain text. It also knows all the standard test sets and handles downloading, processing, and tokenization.
See the [README.md] file at https://github.com/mjpost/sacreBLEU for more information.
## How to Use
This metric takes a set of predictions and a set of references as input, along with various optional parameters.
```python
>>> predictions = ["hello there general kenobi", "foo bar foobar"]
>>> references = [["hello there general kenobi", "hello there !"],
... ["foo bar foobar", "foo bar foobar"]]
>>> sacrebleu = datasets.load_metric("sacrebleu")
>>> results = sacrebleu.compute(predictions=predictions,
... references=references)
>>> print(list(results.keys()))
['score', 'counts', 'totals', 'precisions', 'bp', 'sys_len', 'ref_len']
>>> print(round(results["score"], 1))
100.0
```
### Inputs
- **`predictions`** (`list` of `str`): list of translations to score. Each translation should be tokenized into a list of tokens.
- **`references`** (`list` of `list` of `str`): A list of lists of references. The contents of the first sub-list are the references for the first prediction, the contents of the second sub-list are for the second prediction, etc. Note that there must be the same number of references for each prediction (i.e. all sub-lists must be of the same length).
- **`smooth_method`** (`str`): The smoothing method to use, defaults to `'exp'`. Possible values are:
- `'none'`: no smoothing
- `'floor'`: increment zero counts
- `'add-k'`: increment num/denom by k for n>1
- `'exp'`: exponential decay
- **`smooth_value`** (`float`): The smoothing value. Only valid when `smooth_method='floor'` (in which case `smooth_value` defaults to `0.1`) or `smooth_method='add-k'` (in which case `smooth_value` defaults to `1`).
- **`tokenize`** (`str`): Tokenization method to use for BLEU. If not provided, defaults to `'zh'` for Chinese, `'ja-mecab'` for Japanese and `'13a'` (mteval) otherwise. Possible values are:
- `'none'`: No tokenization.
- `'zh'`: Chinese tokenization.
- `'13a'`: mimics the `mteval-v13a` script from Moses.
- `'intl'`: International tokenization, mimics the `mteval-v14` script from Moses
- `'char'`: Language-agnostic character-level tokenization.
- `'ja-mecab'`: Japanese tokenization. Uses the [MeCab tokenizer](https://pypi.org/project/mecab-python3).
- **`lowercase`** (`bool`): If `True`, lowercases the input, enabling case-insensitivity. Defaults to `False`.
- **`force`** (`bool`): If `True`, insists that your tokenized input is actually detokenized. Defaults to `False`.
- **`use_effective_order`** (`bool`): If `True`, stops including n-gram orders for which precision is 0. This should be `True`, if sentence-level BLEU will be computed. Defaults to `False`.
### Output Values
- `score`: BLEU score
- `counts`: Counts
- `totals`: Totals
- `precisions`: Precisions
- `bp`: Brevity penalty
- `sys_len`: predictions length
- `ref_len`: reference length
The output is in the following format:
```python
{'score': 39.76353643835252, 'counts': [6, 4, 2, 1], 'totals': [10, 8, 6, 4], 'precisions': [60.0, 50.0, 33.333333333333336, 25.0], 'bp': 1.0, 'sys_len': 10, 'ref_len': 7}
```
The score can take any value between `0.0` and `100.0`, inclusive.
#### Values from Popular Papers
### Examples
```python
>>> predictions = ["hello there general kenobi",
... "on our way to ankh morpork"]
>>> references = [["hello there general kenobi", "hello there !"],
... ["goodbye ankh morpork", "ankh morpork"]]
>>> sacrebleu = datasets.load_metric("sacrebleu")
>>> results = sacrebleu.compute(predictions=predictions,
... references=references)
>>> print(list(results.keys()))
['score', 'counts', 'totals', 'precisions', 'bp', 'sys_len', 'ref_len']
>>> print(round(results["score"], 1))
39.8
```
## Limitations and Bias
Because what this metric calculates is BLEU scores, it has the same limitations as that metric, except that sacreBLEU is more easily reproducible.
## Citation
```bibtex
@inproceedings{post-2018-call,
title = "A Call for Clarity in Reporting {BLEU} Scores",
author = "Post, Matt",
booktitle = "Proceedings of the Third Conference on Machine Translation: Research Papers",
month = oct,
year = "2018",
address = "Belgium, Brussels",
publisher = "Association for Computational Linguistics",
url = "https://www.aclweb.org/anthology/W18-6319",
pages = "186--191",
}
```
## Further References
- See the [sacreBLEU README.md file](https://github.com/mjpost/sacreBLEU) for more information. | datasets/metrics/sacrebleu/README.md/0 | {
"file_path": "datasets/metrics/sacrebleu/README.md",
"repo_id": "datasets",
"token_count": 1692
} | 60 |
# Copyright 2020 The HuggingFace Datasets Authors.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
"""The SuperGLUE benchmark metric."""
from sklearn.metrics import f1_score, matthews_corrcoef
import datasets
from .record_evaluation import evaluate as evaluate_record
_CITATION = """\
@article{wang2019superglue,
title={SuperGLUE: A Stickier Benchmark for General-Purpose Language Understanding Systems},
author={Wang, Alex and Pruksachatkun, Yada and Nangia, Nikita and Singh, Amanpreet and Michael, Julian and Hill, Felix and Levy, Omer and Bowman, Samuel R},
journal={arXiv preprint arXiv:1905.00537},
year={2019}
}
"""
_DESCRIPTION = """\
SuperGLUE (https://super.gluebenchmark.com/) is a new benchmark styled after
GLUE with a new set of more difficult language understanding tasks, improved
resources, and a new public leaderboard.
"""
_KWARGS_DESCRIPTION = """
Compute SuperGLUE evaluation metric associated to each SuperGLUE dataset.
Args:
predictions: list of predictions to score. Depending on the SuperGlUE subset:
- for 'record': list of question-answer dictionaries with the following keys:
- 'idx': index of the question as specified by the dataset
- 'prediction_text': the predicted answer text
- for 'multirc': list of question-answer dictionaries with the following keys:
- 'idx': index of the question-answer pair as specified by the dataset
- 'prediction': the predicted answer label
- otherwise: list of predicted labels
references: list of reference labels. Depending on the SuperGLUE subset:
- for 'record': list of question-answers dictionaries with the following keys:
- 'idx': index of the question as specified by the dataset
- 'answers': list of possible answers
- otherwise: list of reference labels
Returns: depending on the SuperGLUE subset:
- for 'record':
- 'exact_match': Exact match between answer and gold answer
- 'f1': F1 score
- for 'multirc':
- 'exact_match': Exact match between answer and gold answer
- 'f1_m': Per-question macro-F1 score
- 'f1_a': Average F1 score over all answers
- for 'axb':
'matthews_correlation': Matthew Correlation
- for 'cb':
- 'accuracy': Accuracy
- 'f1': F1 score
- for all others:
- 'accuracy': Accuracy
Examples:
>>> super_glue_metric = datasets.load_metric('super_glue', 'copa') # any of ["copa", "rte", "wic", "wsc", "wsc.fixed", "boolq", "axg"]
>>> predictions = [0, 1]
>>> references = [0, 1]
>>> results = super_glue_metric.compute(predictions=predictions, references=references)
>>> print(results)
{'accuracy': 1.0}
>>> super_glue_metric = datasets.load_metric('super_glue', 'cb')
>>> predictions = [0, 1]
>>> references = [0, 1]
>>> results = super_glue_metric.compute(predictions=predictions, references=references)
>>> print(results)
{'accuracy': 1.0, 'f1': 1.0}
>>> super_glue_metric = datasets.load_metric('super_glue', 'record')
>>> predictions = [{'idx': {'passage': 0, 'query': 0}, 'prediction_text': 'answer'}]
>>> references = [{'idx': {'passage': 0, 'query': 0}, 'answers': ['answer', 'another_answer']}]
>>> results = super_glue_metric.compute(predictions=predictions, references=references)
>>> print(results)
{'exact_match': 1.0, 'f1': 1.0}
>>> super_glue_metric = datasets.load_metric('super_glue', 'multirc')
>>> predictions = [{'idx': {'answer': 0, 'paragraph': 0, 'question': 0}, 'prediction': 0}, {'idx': {'answer': 1, 'paragraph': 2, 'question': 3}, 'prediction': 1}]
>>> references = [0, 1]
>>> results = super_glue_metric.compute(predictions=predictions, references=references)
>>> print(results)
{'exact_match': 1.0, 'f1_m': 1.0, 'f1_a': 1.0}
>>> super_glue_metric = datasets.load_metric('super_glue', 'axb')
>>> references = [0, 1]
>>> predictions = [0, 1]
>>> results = super_glue_metric.compute(predictions=predictions, references=references)
>>> print(results)
{'matthews_correlation': 1.0}
"""
def simple_accuracy(preds, labels):
return float((preds == labels).mean())
def acc_and_f1(preds, labels, f1_avg="binary"):
acc = simple_accuracy(preds, labels)
f1 = float(f1_score(y_true=labels, y_pred=preds, average=f1_avg))
return {
"accuracy": acc,
"f1": f1,
}
def evaluate_multirc(ids_preds, labels):
"""
Computes F1 score and Exact Match for MultiRC predictions.
"""
question_map = {}
for id_pred, label in zip(ids_preds, labels):
question_id = f'{id_pred["idx"]["paragraph"]}-{id_pred["idx"]["question"]}'
pred = id_pred["prediction"]
if question_id in question_map:
question_map[question_id].append((pred, label))
else:
question_map[question_id] = [(pred, label)]
f1s, ems = [], []
for question, preds_labels in question_map.items():
question_preds, question_labels = zip(*preds_labels)
f1 = f1_score(y_true=question_labels, y_pred=question_preds, average="macro")
f1s.append(f1)
em = int(sum(pred == label for pred, label in preds_labels) == len(preds_labels))
ems.append(em)
f1_m = float(sum(f1s) / len(f1s))
em = sum(ems) / len(ems)
f1_a = float(f1_score(y_true=labels, y_pred=[id_pred["prediction"] for id_pred in ids_preds]))
return {"exact_match": em, "f1_m": f1_m, "f1_a": f1_a}
@datasets.utils.file_utils.add_start_docstrings(_DESCRIPTION, _KWARGS_DESCRIPTION)
class SuperGlue(datasets.Metric):
def _info(self):
if self.config_name not in [
"boolq",
"cb",
"copa",
"multirc",
"record",
"rte",
"wic",
"wsc",
"wsc.fixed",
"axb",
"axg",
]:
raise KeyError(
"You should supply a configuration name selected in "
'["boolq", "cb", "copa", "multirc", "record", "rte", "wic", "wsc", "wsc.fixed", "axb", "axg",]'
)
return datasets.MetricInfo(
description=_DESCRIPTION,
citation=_CITATION,
inputs_description=_KWARGS_DESCRIPTION,
features=datasets.Features(self._get_feature_types()),
codebase_urls=[],
reference_urls=[],
format="numpy" if not self.config_name == "record" and not self.config_name == "multirc" else None,
)
def _get_feature_types(self):
if self.config_name == "record":
return {
"predictions": {
"idx": {
"passage": datasets.Value("int64"),
"query": datasets.Value("int64"),
},
"prediction_text": datasets.Value("string"),
},
"references": {
"idx": {
"passage": datasets.Value("int64"),
"query": datasets.Value("int64"),
},
"answers": datasets.Sequence(datasets.Value("string")),
},
}
elif self.config_name == "multirc":
return {
"predictions": {
"idx": {
"answer": datasets.Value("int64"),
"paragraph": datasets.Value("int64"),
"question": datasets.Value("int64"),
},
"prediction": datasets.Value("int64"),
},
"references": datasets.Value("int64"),
}
else:
return {
"predictions": datasets.Value("int64"),
"references": datasets.Value("int64"),
}
def _compute(self, predictions, references):
if self.config_name == "axb":
return {"matthews_correlation": matthews_corrcoef(references, predictions)}
elif self.config_name == "cb":
return acc_and_f1(predictions, references, f1_avg="macro")
elif self.config_name == "record":
dataset = [
{
"qas": [
{"id": ref["idx"]["query"], "answers": [{"text": ans} for ans in ref["answers"]]}
for ref in references
]
}
]
predictions = {pred["idx"]["query"]: pred["prediction_text"] for pred in predictions}
return evaluate_record(dataset, predictions)[0]
elif self.config_name == "multirc":
return evaluate_multirc(predictions, references)
elif self.config_name in ["copa", "rte", "wic", "wsc", "wsc.fixed", "boolq", "axg"]:
return {"accuracy": simple_accuracy(predictions, references)}
else:
raise KeyError(
"You should supply a configuration name selected in "
'["boolq", "cb", "copa", "multirc", "record", "rte", "wic", "wsc", "wsc.fixed", "axb", "axg",]'
)
| datasets/metrics/super_glue/super_glue.py/0 | {
"file_path": "datasets/metrics/super_glue/super_glue.py",
"repo_id": "datasets",
"token_count": 4296
} | 61 |
__all__ = [
"DownloadConfig",
"DownloadManager",
"DownloadMode",
"StreamingDownloadManager",
]
from .download_config import DownloadConfig
from .download_manager import DownloadManager, DownloadMode
from .streaming_download_manager import StreamingDownloadManager
| datasets/src/datasets/download/__init__.py/0 | {
"file_path": "datasets/src/datasets/download/__init__.py",
"repo_id": "datasets",
"token_count": 77
} | 62 |
# Copyright 2020 The HuggingFace Authors.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
from collections.abc import Mapping, MutableMapping
from functools import partial
# Lint as: python3
from typing import Any, Callable, Dict, Generic, Iterable, List, Optional, TypeVar, Union
import numpy as np
import pandas as pd
import pyarrow as pa
from packaging import version
from .. import config
from ..features import Features
from ..features.features import _ArrayXDExtensionType, _is_zero_copy_only, decode_nested_example, pandas_types_mapper
from ..table import Table
from ..utils.py_utils import no_op_if_value_is_null
T = TypeVar("T")
RowFormat = TypeVar("RowFormat")
ColumnFormat = TypeVar("ColumnFormat")
BatchFormat = TypeVar("BatchFormat")
def _is_range_contiguous(key: range) -> bool:
return key.step == 1 and key.stop >= key.start
def _raise_bad_key_type(key: Any):
raise TypeError(
f"Wrong key type: '{key}' of type '{type(key)}'. Expected one of int, slice, range, str or Iterable."
)
def _query_table_with_indices_mapping(
table: Table, key: Union[int, slice, range, str, Iterable], indices: Table
) -> pa.Table:
"""
Query a pyarrow Table to extract the subtable that correspond to the given key.
The :obj:`indices` parameter corresponds to the indices mapping in case we cant to take into
account a shuffling or an indices selection for example.
The indices table must contain one column named "indices" of type uint64.
"""
if isinstance(key, int):
key = indices.fast_slice(key % indices.num_rows, 1).column(0)[0].as_py()
return _query_table(table, key)
if isinstance(key, slice):
key = range(*key.indices(indices.num_rows))
if isinstance(key, range):
if _is_range_contiguous(key) and key.start >= 0:
return _query_table(
table, [i.as_py() for i in indices.fast_slice(key.start, key.stop - key.start).column(0)]
)
else:
pass # treat as an iterable
if isinstance(key, str):
table = table.select([key])
return _query_table(table, indices.column(0).to_pylist())
if isinstance(key, Iterable):
return _query_table(table, [indices.fast_slice(i, 1).column(0)[0].as_py() for i in key])
_raise_bad_key_type(key)
def _query_table(table: Table, key: Union[int, slice, range, str, Iterable]) -> pa.Table:
"""
Query a pyarrow Table to extract the subtable that correspond to the given key.
"""
if isinstance(key, int):
return table.fast_slice(key % table.num_rows, 1)
if isinstance(key, slice):
key = range(*key.indices(table.num_rows))
if isinstance(key, range):
if _is_range_contiguous(key) and key.start >= 0:
return table.fast_slice(key.start, key.stop - key.start)
else:
pass # treat as an iterable
if isinstance(key, str):
return table.table.drop([column for column in table.column_names if column != key])
if isinstance(key, Iterable):
key = np.fromiter(key, np.int64)
if len(key) == 0:
return table.table.slice(0, 0)
# don't use pyarrow.Table.take even for pyarrow >=1.0 (see https://issues.apache.org/jira/browse/ARROW-9773)
return table.fast_gather(key % table.num_rows)
_raise_bad_key_type(key)
def _is_array_with_nulls(pa_array: pa.Array) -> bool:
return pa_array.null_count > 0
class BaseArrowExtractor(Generic[RowFormat, ColumnFormat, BatchFormat]):
"""
Arrow extractor are used to extract data from pyarrow tables.
It makes it possible to extract rows, columns and batches.
These three extractions types have to be implemented.
"""
def extract_row(self, pa_table: pa.Table) -> RowFormat:
raise NotImplementedError
def extract_column(self, pa_table: pa.Table) -> ColumnFormat:
raise NotImplementedError
def extract_batch(self, pa_table: pa.Table) -> BatchFormat:
raise NotImplementedError
def _unnest(py_dict: Dict[str, List[T]]) -> Dict[str, T]:
"""Return the first element of a batch (dict) as a row (dict)"""
return {key: array[0] for key, array in py_dict.items()}
class SimpleArrowExtractor(BaseArrowExtractor[pa.Table, pa.Array, pa.Table]):
def extract_row(self, pa_table: pa.Table) -> pa.Table:
return pa_table
def extract_column(self, pa_table: pa.Table) -> pa.Array:
return pa_table.column(0)
def extract_batch(self, pa_table: pa.Table) -> pa.Table:
return pa_table
class PythonArrowExtractor(BaseArrowExtractor[dict, list, dict]):
def extract_row(self, pa_table: pa.Table) -> dict:
return _unnest(pa_table.to_pydict())
def extract_column(self, pa_table: pa.Table) -> list:
return pa_table.column(0).to_pylist()
def extract_batch(self, pa_table: pa.Table) -> dict:
return pa_table.to_pydict()
class NumpyArrowExtractor(BaseArrowExtractor[dict, np.ndarray, dict]):
def __init__(self, **np_array_kwargs):
self.np_array_kwargs = np_array_kwargs
def extract_row(self, pa_table: pa.Table) -> dict:
return _unnest(self.extract_batch(pa_table))
def extract_column(self, pa_table: pa.Table) -> np.ndarray:
return self._arrow_array_to_numpy(pa_table[pa_table.column_names[0]])
def extract_batch(self, pa_table: pa.Table) -> dict:
return {col: self._arrow_array_to_numpy(pa_table[col]) for col in pa_table.column_names}
def _arrow_array_to_numpy(self, pa_array: pa.Array) -> np.ndarray:
if isinstance(pa_array, pa.ChunkedArray):
if isinstance(pa_array.type, _ArrayXDExtensionType):
# don't call to_pylist() to preserve dtype of the fixed-size array
zero_copy_only = _is_zero_copy_only(pa_array.type.storage_dtype, unnest=True)
array: List = [
row for chunk in pa_array.chunks for row in chunk.to_numpy(zero_copy_only=zero_copy_only)
]
else:
zero_copy_only = _is_zero_copy_only(pa_array.type) and all(
not _is_array_with_nulls(chunk) for chunk in pa_array.chunks
)
array: List = [
row for chunk in pa_array.chunks for row in chunk.to_numpy(zero_copy_only=zero_copy_only)
]
else:
if isinstance(pa_array.type, _ArrayXDExtensionType):
# don't call to_pylist() to preserve dtype of the fixed-size array
zero_copy_only = _is_zero_copy_only(pa_array.type.storage_dtype, unnest=True)
array: List = pa_array.to_numpy(zero_copy_only=zero_copy_only)
else:
zero_copy_only = _is_zero_copy_only(pa_array.type) and not _is_array_with_nulls(pa_array)
array: List = pa_array.to_numpy(zero_copy_only=zero_copy_only).tolist()
if len(array) > 0:
if any(
(isinstance(x, np.ndarray) and (x.dtype == object or x.shape != array[0].shape))
or (isinstance(x, float) and np.isnan(x))
for x in array
):
return np.array(array, copy=False, dtype=object)
return np.array(array, copy=False)
class PandasArrowExtractor(BaseArrowExtractor[pd.DataFrame, pd.Series, pd.DataFrame]):
def extract_row(self, pa_table: pa.Table) -> pd.DataFrame:
return pa_table.slice(length=1).to_pandas(types_mapper=pandas_types_mapper)
def extract_column(self, pa_table: pa.Table) -> pd.Series:
return pa_table.select([0]).to_pandas(types_mapper=pandas_types_mapper)[pa_table.column_names[0]]
def extract_batch(self, pa_table: pa.Table) -> pd.DataFrame:
return pa_table.to_pandas(types_mapper=pandas_types_mapper)
class PythonFeaturesDecoder:
def __init__(self, features: Optional[Features]):
self.features = features
def decode_row(self, row: dict) -> dict:
return self.features.decode_example(row) if self.features else row
def decode_column(self, column: list, column_name: str) -> list:
return self.features.decode_column(column, column_name) if self.features else column
def decode_batch(self, batch: dict) -> dict:
return self.features.decode_batch(batch) if self.features else batch
class PandasFeaturesDecoder:
def __init__(self, features: Optional[Features]):
self.features = features
def decode_row(self, row: pd.DataFrame) -> pd.DataFrame:
decode = (
{
column_name: no_op_if_value_is_null(partial(decode_nested_example, feature))
for column_name, feature in self.features.items()
if self.features._column_requires_decoding[column_name]
}
if self.features
else {}
)
if decode:
row[list(decode.keys())] = row.transform(decode)
return row
def decode_column(self, column: pd.Series, column_name: str) -> pd.Series:
decode = (
no_op_if_value_is_null(partial(decode_nested_example, self.features[column_name]))
if self.features and column_name in self.features and self.features._column_requires_decoding[column_name]
else None
)
if decode:
column = column.transform(decode)
return column
def decode_batch(self, batch: pd.DataFrame) -> pd.DataFrame:
return self.decode_row(batch)
class LazyDict(MutableMapping):
"""A dictionary backed by Arrow data. The values are formatted on-the-fly when accessing the dictionary."""
def __init__(self, pa_table: pa.Table, formatter: "Formatter"):
self.pa_table = pa_table
self.formatter = formatter
self.data = {key: None for key in pa_table.column_names}
self.keys_to_format = set(self.data.keys())
def __len__(self):
return len(self.data)
def __getitem__(self, key):
value = self.data[key]
if key in self.keys_to_format:
value = self.format(key)
self.data[key] = value
self.keys_to_format.remove(key)
return value
def __setitem__(self, key, value):
if key in self.keys_to_format:
self.keys_to_format.remove(key)
self.data[key] = value
def __delitem__(self, key) -> None:
if key in self.keys_to_format:
self.keys_to_format.remove(key)
del self.data[key]
def __iter__(self):
return iter(self.data)
def __contains__(self, key):
return key in self.data
def __repr__(self):
self._format_all()
return repr(self.data)
if config.PY_VERSION >= version.parse("3.9"):
# merging with the union ("|") operator is supported in Python 3.9+
def __or__(self, other):
if isinstance(other, LazyDict):
inst = self.copy()
other = other.copy()
other._format_all()
inst.keys_to_format -= other.data.keys()
inst.data = inst.data | other.data
return inst
if isinstance(other, dict):
inst = self.copy()
inst.keys_to_format -= other.keys()
inst.data = inst.data | other
return inst
return NotImplemented
def __ror__(self, other):
if isinstance(other, LazyDict):
inst = self.copy()
other = other.copy()
other._format_all()
inst.keys_to_format -= other.data.keys()
inst.data = other.data | inst.data
return inst
if isinstance(other, dict):
inst = self.copy()
inst.keys_to_format -= other.keys()
inst.data = other | inst.data
return inst
return NotImplemented
def __ior__(self, other):
if isinstance(other, LazyDict):
other = other.copy()
other._format_all()
self.keys_to_format -= other.data.keys()
self.data |= other.data
else:
self.keys_to_format -= other.keys()
self.data |= other
return self
def __copy__(self):
# Identical to `UserDict.__copy__`
inst = self.__class__.__new__(self.__class__)
inst.__dict__.update(self.__dict__)
# Create a copy and avoid triggering descriptors
inst.__dict__["data"] = self.__dict__["data"].copy()
inst.__dict__["keys_to_format"] = self.__dict__["keys_to_format"].copy()
return inst
def copy(self):
import copy
return copy.copy(self)
@classmethod
def fromkeys(cls, iterable, value=None):
raise NotImplementedError
def format(self, key):
raise NotImplementedError
def _format_all(self):
for key in self.keys_to_format:
self.data[key] = self.format(key)
self.keys_to_format.clear()
class LazyRow(LazyDict):
def format(self, key):
return self.formatter.format_column(self.pa_table.select([key]))[0]
class LazyBatch(LazyDict):
def format(self, key):
return self.formatter.format_column(self.pa_table.select([key]))
class Formatter(Generic[RowFormat, ColumnFormat, BatchFormat]):
"""
A formatter is an object that extracts and formats data from pyarrow tables.
It defines the formatting for rows, columns and batches.
"""
simple_arrow_extractor = SimpleArrowExtractor
python_arrow_extractor = PythonArrowExtractor
numpy_arrow_extractor = NumpyArrowExtractor
pandas_arrow_extractor = PandasArrowExtractor
def __init__(self, features: Optional[Features] = None):
self.features = features
self.python_features_decoder = PythonFeaturesDecoder(self.features)
self.pandas_features_decoder = PandasFeaturesDecoder(self.features)
def __call__(self, pa_table: pa.Table, query_type: str) -> Union[RowFormat, ColumnFormat, BatchFormat]:
if query_type == "row":
return self.format_row(pa_table)
elif query_type == "column":
return self.format_column(pa_table)
elif query_type == "batch":
return self.format_batch(pa_table)
def format_row(self, pa_table: pa.Table) -> RowFormat:
raise NotImplementedError
def format_column(self, pa_table: pa.Table) -> ColumnFormat:
raise NotImplementedError
def format_batch(self, pa_table: pa.Table) -> BatchFormat:
raise NotImplementedError
class TensorFormatter(Formatter[RowFormat, ColumnFormat, BatchFormat]):
def recursive_tensorize(self, data_struct: dict):
raise NotImplementedError
class ArrowFormatter(Formatter[pa.Table, pa.Array, pa.Table]):
def format_row(self, pa_table: pa.Table) -> pa.Table:
return self.simple_arrow_extractor().extract_row(pa_table)
def format_column(self, pa_table: pa.Table) -> pa.Array:
return self.simple_arrow_extractor().extract_column(pa_table)
def format_batch(self, pa_table: pa.Table) -> pa.Table:
return self.simple_arrow_extractor().extract_batch(pa_table)
class PythonFormatter(Formatter[Mapping, list, Mapping]):
def __init__(self, features=None, lazy=False):
super().__init__(features)
self.lazy = lazy
def format_row(self, pa_table: pa.Table) -> Mapping:
if self.lazy:
return LazyRow(pa_table, self)
row = self.python_arrow_extractor().extract_row(pa_table)
row = self.python_features_decoder.decode_row(row)
return row
def format_column(self, pa_table: pa.Table) -> list:
column = self.python_arrow_extractor().extract_column(pa_table)
column = self.python_features_decoder.decode_column(column, pa_table.column_names[0])
return column
def format_batch(self, pa_table: pa.Table) -> Mapping:
if self.lazy:
return LazyBatch(pa_table, self)
batch = self.python_arrow_extractor().extract_batch(pa_table)
batch = self.python_features_decoder.decode_batch(batch)
return batch
class PandasFormatter(Formatter[pd.DataFrame, pd.Series, pd.DataFrame]):
def format_row(self, pa_table: pa.Table) -> pd.DataFrame:
row = self.pandas_arrow_extractor().extract_row(pa_table)
row = self.pandas_features_decoder.decode_row(row)
return row
def format_column(self, pa_table: pa.Table) -> pd.Series:
column = self.pandas_arrow_extractor().extract_column(pa_table)
column = self.pandas_features_decoder.decode_column(column, pa_table.column_names[0])
return column
def format_batch(self, pa_table: pa.Table) -> pd.DataFrame:
row = self.pandas_arrow_extractor().extract_batch(pa_table)
row = self.pandas_features_decoder.decode_batch(row)
return row
class CustomFormatter(Formatter[dict, ColumnFormat, dict]):
"""
A user-defined custom formatter function defined by a ``transform``.
The transform must take as input a batch of data extracted for an arrow table using the python extractor,
and return a batch.
If the output batch is not a dict, then output_all_columns won't work.
If the ouput batch has several fields, then querying a single column won't work since we don't know which field
to return.
"""
def __init__(self, transform: Callable[[dict], dict], features=None, **kwargs):
super().__init__(features=features)
self.transform = transform
def format_row(self, pa_table: pa.Table) -> dict:
formatted_batch = self.format_batch(pa_table)
try:
return _unnest(formatted_batch)
except Exception as exc:
raise TypeError(
f"Custom formatting function must return a dict of sequences to be able to pick a row, but got {formatted_batch}"
) from exc
def format_column(self, pa_table: pa.Table) -> ColumnFormat:
formatted_batch = self.format_batch(pa_table)
if hasattr(formatted_batch, "keys"):
if len(formatted_batch.keys()) > 1:
raise TypeError(
"Tried to query a column but the custom formatting function returns too many columns. "
f"Only one column was expected but got columns {list(formatted_batch.keys())}."
)
else:
raise TypeError(
f"Custom formatting function must return a dict to be able to pick a row, but got {formatted_batch}"
)
try:
return formatted_batch[pa_table.column_names[0]]
except Exception as exc:
raise TypeError(
f"Custom formatting function must return a dict to be able to pick a row, but got {formatted_batch}"
) from exc
def format_batch(self, pa_table: pa.Table) -> dict:
batch = self.python_arrow_extractor().extract_batch(pa_table)
batch = self.python_features_decoder.decode_batch(batch)
return self.transform(batch)
def _check_valid_column_key(key: str, columns: List[str]) -> None:
if key not in columns:
raise KeyError(f"Column {key} not in the dataset. Current columns in the dataset: {columns}")
def _check_valid_index_key(key: Union[int, slice, range, Iterable], size: int) -> None:
if isinstance(key, int):
if (key < 0 and key + size < 0) or (key >= size):
raise IndexError(f"Invalid key: {key} is out of bounds for size {size}")
return
elif isinstance(key, slice):
pass
elif isinstance(key, range):
if len(key) > 0:
_check_valid_index_key(max(key), size=size)
_check_valid_index_key(min(key), size=size)
elif isinstance(key, Iterable):
if len(key) > 0:
_check_valid_index_key(int(max(key)), size=size)
_check_valid_index_key(int(min(key)), size=size)
else:
_raise_bad_key_type(key)
def key_to_query_type(key: Union[int, slice, range, str, Iterable]) -> str:
if isinstance(key, int):
return "row"
elif isinstance(key, str):
return "column"
elif isinstance(key, (slice, range, Iterable)):
return "batch"
_raise_bad_key_type(key)
def query_table(
table: Table,
key: Union[int, slice, range, str, Iterable],
indices: Optional[Table] = None,
) -> pa.Table:
"""
Query a Table to extract the subtable that correspond to the given key.
Args:
table (``datasets.table.Table``): The input Table to query from
key (``Union[int, slice, range, str, Iterable]``): The key can be of different types:
- an integer i: the subtable containing only the i-th row
- a slice [i:j:k]: the subtable containing the rows that correspond to this slice
- a range(i, j, k): the subtable containing the rows that correspond to this range
- a string c: the subtable containing all the rows but only the column c
- an iterable l: the subtable that is the concatenation of all the i-th rows for all i in the iterable
indices (Optional ``datasets.table.Table``): If not None, it is used to re-map the given key to the table rows.
The indices table must contain one column named "indices" of type uint64.
This is used in case of shuffling or rows selection.
Returns:
``pyarrow.Table``: the result of the query on the input table
"""
# Check if key is valid
if not isinstance(key, (int, slice, range, str, Iterable)):
_raise_bad_key_type(key)
if isinstance(key, str):
_check_valid_column_key(key, table.column_names)
else:
size = indices.num_rows if indices is not None else table.num_rows
_check_valid_index_key(key, size)
# Query the main table
if indices is None:
pa_subtable = _query_table(table, key)
else:
pa_subtable = _query_table_with_indices_mapping(table, key, indices=indices)
return pa_subtable
def format_table(
table: Table,
key: Union[int, slice, range, str, Iterable],
formatter: Formatter,
format_columns: Optional[list] = None,
output_all_columns=False,
):
"""
Format a Table depending on the key that was used and a Formatter object.
Args:
table (``datasets.table.Table``): The input Table to format
key (``Union[int, slice, range, str, Iterable]``): Depending on the key that was used, the formatter formats
the table as either a row, a column or a batch.
formatter (``datasets.formatting.formatting.Formatter``): Any subclass of a Formatter such as
PythonFormatter, NumpyFormatter, etc.
format_columns (:obj:`List[str]`, optional): if not None, it defines the columns that will be formatted using the
given formatter. Other columns are discarded (unless ``output_all_columns`` is True)
output_all_columns (:obj:`bool`, defaults to False). If True, the formatted output is completed using the columns
that are not in the ``format_columns`` list. For these columns, the PythonFormatter is used.
Returns:
A row, column or batch formatted object defined by the Formatter:
- the PythonFormatter returns a dictionary for a row or a batch, and a list for a column.
- the NumpyFormatter returns a dictionary for a row or a batch, and a np.array for a column.
- the PandasFormatter returns a pd.DataFrame for a row or a batch, and a pd.Series for a column.
- the TorchFormatter returns a dictionary for a row or a batch, and a torch.Tensor for a column.
- the TFFormatter returns a dictionary for a row or a batch, and a tf.Tensor for a column.
"""
if isinstance(table, Table):
pa_table = table.table
else:
pa_table = table
query_type = key_to_query_type(key)
python_formatter = PythonFormatter(features=formatter.features)
if format_columns is None:
return formatter(pa_table, query_type=query_type)
elif query_type == "column":
if key in format_columns:
return formatter(pa_table, query_type)
else:
return python_formatter(pa_table, query_type=query_type)
else:
pa_table_to_format = pa_table.drop(col for col in pa_table.column_names if col not in format_columns)
formatted_output = formatter(pa_table_to_format, query_type=query_type)
if output_all_columns:
if isinstance(formatted_output, MutableMapping):
pa_table_with_remaining_columns = pa_table.drop(
col for col in pa_table.column_names if col in format_columns
)
remaining_columns_dict = python_formatter(pa_table_with_remaining_columns, query_type=query_type)
formatted_output.update(remaining_columns_dict)
else:
raise TypeError(
f"Custom formatting function must return a dict to work with output_all_columns=True, but got {formatted_output}"
)
return formatted_output
| datasets/src/datasets/formatting/formatting.py/0 | {
"file_path": "datasets/src/datasets/formatting/formatting.py",
"repo_id": "datasets",
"token_count": 10729
} | 63 |
import copy
import itertools
import sys
import warnings
from collections import Counter
from copy import deepcopy
from dataclasses import dataclass
from functools import partial
from itertools import cycle, islice
from typing import Any, Callable, Dict, Iterable, Iterator, List, Optional, Tuple, Union
import numpy as np
import pyarrow as pa
from . import config
from .arrow_dataset import Dataset, DatasetInfoMixin
from .features import Features
from .features.features import FeatureType, _align_features, _check_if_features_can_be_aligned, cast_to_python_objects
from .filesystems import _reset_fsspec_lock
from .formatting import PythonFormatter, TensorFormatter, get_format_type_from_alias, get_formatter
from .info import DatasetInfo
from .splits import NamedSplit
from .table import cast_table_to_features, read_schema_from_file, table_cast
from .utils.logging import get_logger
from .utils.py_utils import Literal
from .utils.sharding import _merge_gen_kwargs, _number_of_shards_in_gen_kwargs, _shuffle_gen_kwargs, _split_gen_kwargs
logger = get_logger(__name__)
Key = Union[int, str]
def identity_func(x):
return x
def _rename_columns_fn(example: Dict, column_mapping: Dict[str, str]):
if any(col not in example for col in column_mapping):
raise ValueError(
f"Error when renaming {list(column_mapping)} to {list(column_mapping.values())}: columns {set(column_mapping) - set(example)} are not in the dataset."
)
if any(col in example for col in column_mapping.values()):
raise ValueError(
f"Error when renaming {list(column_mapping)} to {list(column_mapping.values())}: columns {set(example) - set(column_mapping.values())} are already in the dataset."
)
return {
new_column_name: example[original_column_name]
for original_column_name, new_column_name in column_mapping.items()
}
def add_column_fn(example: Dict, idx: int, name: str, column: List[Dict]):
if name in example:
raise ValueError(f"Error when adding {name}: column {name} is already in the dataset.")
return {name: column[idx]}
def _infer_features_from_batch(batch: Dict[str, list], try_features: Optional[Features] = None) -> Features:
pa_table = pa.Table.from_pydict(batch)
if try_features is not None:
try:
pa_table = table_cast(pa_table, pa.schema(try_features.type))
except (TypeError, pa.ArrowInvalid, pa.ArrowNotImplementedError):
pass
return Features.from_arrow_schema(pa_table.schema)
def _examples_to_batch(examples: List[Dict[str, Any]]) -> Dict[str, list]:
# we order the columns by order of appearance
# to do so, we use a dict as an ordered set
cols = {col: None for example in examples for col in example}
# when an example is missing a column, we set the value to None with .get()
arrays = [[example.get(col) for example in examples] for col in cols]
return dict(zip(cols, arrays))
def _batch_to_examples(batch: Dict[str, list]) -> List[Dict[str, Any]]:
"""Convert a batch (dict of examples) to examples list"""
n_examples = len(batch[next(iter(batch))])
for i in range(n_examples):
yield {col: array[i] for col, array in batch.items()}
class _HasNextIterator(Iterator):
"""Iterator with an hasnext() function. Taken from https://stackoverflow.com/questions/1966591/has-next-in-python-iterators."""
def __init__(self, it):
self.it = iter(it)
self._hasnext = None
def __iter__(self):
return self
def __next__(self):
if self._hasnext:
result = self._thenext
else:
result = next(self.it)
self._hasnext = None
return result
def hasnext(self):
if self._hasnext is None:
try:
self._thenext = next(self.it)
except StopIteration:
self._hasnext = False
else:
self._hasnext = True
return self._hasnext
def _convert_to_arrow(
iterable: Iterable[Tuple[Key, dict]],
batch_size: int,
drop_last_batch: bool = False,
) -> Iterator[Tuple[Key, pa.Table]]:
"""Convert and group examples in Arrow tables of size `batch_size`.
Args:
iterable (`Iterable[Tuple[Key, dict]]`):
An examples iterable containing tuples (example_key, example) of type (int/str, dict)
batch_size (`Optional[int]`):
Size of each sub-table to yield. If None or <= 0, yields the full table.
drop_last_batch (`bool`, defaults to `False`):
Drop the last batch if it is smaller than `batch_size`.
"""
if batch_size is None or batch_size <= 0:
yield (
"all",
pa.Table.from_pylist(cast_to_python_objects([example for _, example in iterable], only_1d_for_numpy=True)),
)
return
iterator = iter(iterable)
for key, example in iterator:
iterator_batch = islice(iterator, batch_size - 1)
key_examples_list = [(key, example)] + list(iterator_batch)
if len(key_examples_list) < batch_size and drop_last_batch:
return
keys, examples = zip(*key_examples_list)
new_key = "_".join(str(key) for key in keys)
yield new_key, pa.Table.from_pylist(cast_to_python_objects(examples, only_1d_for_numpy=True))
def _batch_arrow_tables(
iterable: Iterable[Tuple[Key, pa.Table]],
batch_size: Optional[int],
drop_last_batch: bool = False,
) -> Iterator[Tuple[Key, pa.Table]]:
"""Iterate over sub-tables of size `batch_size`.
Args:
iterable (`Iterable[Tuple[Key, pa.Table]]`):
A tables iterable containing tuples (table_key, table) of type (int/str, pa.Table)
batch_size (`Optional[int]`):
Size of each sub-table to yield. If None or <= 0, yields the full table.
drop_last_batch (`bool`, defaults to `False`):
Drop the last batch if it is smaller than `batch_size`.
"""
if batch_size is None or batch_size <= 0:
yield "all", pa.concat_tables([pa_table for _, pa_table in iterable])
return
keys_buffer = []
chunks_buffer = []
chunks_buffer_size = 0
for key, pa_table in iterable:
for chunk in pa_table.to_reader(max_chunksize=batch_size):
if len(chunk) == 0:
continue
elif chunks_buffer_size + len(chunk) < batch_size:
keys_buffer.append(key)
chunks_buffer.append(chunk)
chunks_buffer_size += len(chunk)
continue
elif chunks_buffer_size + len(chunk) == batch_size:
keys_buffer.append(key)
chunks_buffer.append(chunk)
new_key = "_".join(str(_key) for _key in keys_buffer)
yield new_key, pa.Table.from_batches(chunks_buffer)
keys_buffer = []
chunks_buffer = []
chunks_buffer_size = 0
else:
cropped_chunk_length = batch_size - chunks_buffer_size
keys_buffer.append(f"{key}[:{cropped_chunk_length}]")
chunks_buffer.append(chunk.slice(0, cropped_chunk_length))
new_key = "_".join(str(_key) for _key in keys_buffer)
yield new_key, pa.Table.from_batches(chunks_buffer)
keys_buffer = [f"{key}[{cropped_chunk_length}:]"]
chunks_buffer = [chunk.slice(cropped_chunk_length, len(chunk) - cropped_chunk_length)]
chunks_buffer_size = len(chunk) - cropped_chunk_length
if not drop_last_batch and chunks_buffer:
new_key = "_".join(str(_key) for _key in keys_buffer)
yield new_key, pa.Table.from_batches(chunks_buffer)
class _BaseExamplesIterable:
"""Base class for the examples iterable used by an IterableDataset"""
def __init__(self) -> None:
self.iter_arrow: Optional[Callable[[], Iterator[Tuple[Key, pa.Table]]]] = None
def __iter__(self) -> Iterator[Tuple[Key, dict]]:
"""An examples iterable should yield tuples (example_key, example) of type (int/str, dict)"""
raise NotImplementedError(f"{type(self)} doesn't implement __iter__ yet")
def shuffle_data_sources(self, generator: np.random.Generator) -> "_BaseExamplesIterable":
"""
Either shuffle the shards/sources of the dataset, or propagate the shuffling to the underlying iterable.
If the order of the shards must stay fixed (when using .skip or .take for example), then this method returns self.
"""
raise NotImplementedError(f"{type(self)} doesn't implement shuffle_data_sources yet")
def shard_data_sources(self, worker_id: int, num_workers: int) -> "_BaseExamplesIterable":
"""Either keep only the requested shard, or propagate the request to the underlying iterable."""
raise NotImplementedError(f"{type(self)} doesn't implement shard_data_sources yet")
def split_shard_indices_by_worker(self, worker_id: int, num_workers: int) -> List[int]:
return list(range(worker_id, self.n_shards, num_workers))
@property
def n_shards(self) -> int:
raise NotImplementedError(f"{type(self)} doesn't implement n_shards yet")
class ExamplesIterable(_BaseExamplesIterable):
def __init__(self, generate_examples_fn: Callable[..., Tuple[Key, dict]], kwargs: dict):
super().__init__()
self.generate_examples_fn = generate_examples_fn
self.kwargs = kwargs
def __iter__(self):
yield from self.generate_examples_fn(**self.kwargs)
def shuffle_data_sources(self, generator: np.random.Generator) -> "ExamplesIterable":
return ShuffledDataSourcesExamplesIterable(self.generate_examples_fn, self.kwargs, generator)
def shard_data_sources(self, worker_id: int, num_workers: int) -> "ExamplesIterable":
"""Keep only the requested shard."""
gen_kwargs_list = _split_gen_kwargs(self.kwargs, max_num_jobs=self.n_shards)
shard_indices = self.split_shard_indices_by_worker(worker_id, num_workers)
requested_gen_kwargs = _merge_gen_kwargs([gen_kwargs_list[i] for i in shard_indices])
return ExamplesIterable(self.generate_examples_fn, requested_gen_kwargs)
@property
def n_shards(self) -> int:
return _number_of_shards_in_gen_kwargs(self.kwargs)
class ShuffledDataSourcesExamplesIterable(ExamplesIterable):
def __init__(
self, generate_examples_fn: Callable[..., Tuple[Key, dict]], kwargs: dict, generator: np.random.Generator
):
super().__init__(generate_examples_fn, kwargs)
self.generator = deepcopy(generator)
def __iter__(self):
"""Shuffle the kwargs order to shuffle shards"""
rng = deepcopy(self.generator)
kwargs_with_shuffled_shards = _shuffle_gen_kwargs(rng, self.kwargs)
yield from self.generate_examples_fn(**kwargs_with_shuffled_shards)
def shard_data_sources(self, worker_id: int, num_workers: int) -> "ExamplesIterable":
"""Keep only the requested shard."""
rng = deepcopy(self.generator)
kwargs_with_shuffled_shards = _shuffle_gen_kwargs(rng, self.kwargs)
return ExamplesIterable(self.generate_examples_fn, kwargs_with_shuffled_shards).shard_data_sources(
worker_id, num_workers
)
class ArrowExamplesIterable(_BaseExamplesIterable):
def __init__(self, generate_tables_fn: Callable[..., Tuple[Key, pa.Table]], kwargs: dict):
super().__init__()
self.generate_tables_fn = generate_tables_fn
self.kwargs = kwargs
self.iter_arrow = self._iter_arrow
def __iter__(self):
formatter = PythonFormatter()
for key, pa_table in self.generate_tables_fn(**self.kwargs):
for pa_subtable in pa_table.to_reader(max_chunksize=config.ARROW_READER_BATCH_SIZE_IN_DATASET_ITER):
formatted_batch = formatter.format_batch(pa_subtable)
for example in _batch_to_examples(formatted_batch):
yield key, example
def _iter_arrow(self):
yield from self.generate_tables_fn(**self.kwargs)
def shuffle_data_sources(self, generator: np.random.Generator) -> "ArrowExamplesIterable":
return ShuffledDataSourcesArrowExamplesIterable(self.generate_tables_fn, self.kwargs, generator)
def shard_data_sources(self, worker_id: int, num_workers: int) -> "ArrowExamplesIterable":
"""Keep only the requested shard."""
gen_kwargs_list = _split_gen_kwargs(self.kwargs, max_num_jobs=self.n_shards)
shard_indices = self.split_shard_indices_by_worker(worker_id, num_workers)
requested_gen_kwargs = _merge_gen_kwargs([gen_kwargs_list[i] for i in shard_indices])
return ArrowExamplesIterable(self.generate_tables_fn, requested_gen_kwargs)
@property
def n_shards(self) -> int:
return _number_of_shards_in_gen_kwargs(self.kwargs)
class ShuffledDataSourcesArrowExamplesIterable(ArrowExamplesIterable):
def __init__(
self,
generate_tables_fn: Callable[..., Tuple[Key, pa.Table]],
kwargs: dict,
generator: np.random.Generator,
):
super().__init__(generate_tables_fn, kwargs)
self.generator = deepcopy(generator)
def __iter__(self):
"""Shuffle the kwargs order to shuffle shards"""
rng = deepcopy(self.generator)
kwargs_with_shuffled_shards = _shuffle_gen_kwargs(rng, self.kwargs)
formatter = PythonFormatter()
for key, pa_table in self.generate_tables_fn(**kwargs_with_shuffled_shards):
for pa_subtable in pa_table.to_reader(max_chunksize=config.ARROW_READER_BATCH_SIZE_IN_DATASET_ITER):
formatted_batch = formatter.format_batch(pa_subtable)
for example in _batch_to_examples(formatted_batch):
yield key, example
def _iter_arrow(self):
rng = deepcopy(self.generator)
kwargs_with_shuffled_shards = _shuffle_gen_kwargs(rng, self.kwargs)
yield from self.generate_tables_fn(**kwargs_with_shuffled_shards)
def shard_data_sources(self, worker_id: int, num_workers: int) -> "ArrowExamplesIterable":
"""Keep only the requested shard."""
rng = deepcopy(self.generator)
kwargs_with_shuffled_shards = _shuffle_gen_kwargs(rng, self.kwargs)
return ArrowExamplesIterable(self.generate_tables_fn, kwargs_with_shuffled_shards).shard_data_sources(
worker_id, num_workers
)
class SelectColumnsIterable(_BaseExamplesIterable):
def __init__(self, ex_iterable: _BaseExamplesIterable, column_names: List[str]):
super().__init__()
self.ex_iterable = ex_iterable
self.column_names = column_names
if self.ex_iterable.iter_arrow:
self.iter_arrow = self._iter_arrow
def __iter__(self):
for idx, row in self.ex_iterable:
yield idx, {c: row[c] for c in self.column_names}
def _iter_arrow(self) -> Iterator[Tuple[Key, pa.Table]]:
for idx, pa_table in self.ex_iterable.iter_arrow():
yield idx, pa_table.select(self.column_names)
def shuffle_data_sources(self, generator: np.random.Generator) -> "SelectColumnsIterable":
return SelectColumnsIterable(self.ex_iterable.shuffle_data_sources(generator), self.column_names)
def shard_data_sources(self, worker_id: int, num_workers: int) -> "SelectColumnsIterable":
return SelectColumnsIterable(self.ex_iterable.shard_data_sources(worker_id, num_workers), self.column_names)
@property
def n_shards(self) -> int:
return self.ex_iterable.n_shards
class StepExamplesIterable(_BaseExamplesIterable):
def __init__(self, ex_iterable: _BaseExamplesIterable, step: int, offset: int):
super().__init__()
self.ex_iterable = ex_iterable
self.step = step
self.offset = offset
# TODO(QL): implement iter_arrow
def __iter__(self):
ex_iterator = iter(self.ex_iterable)
while True:
batch = list(islice(ex_iterator, self.step))
if len(batch) > self.offset:
yield batch[self.offset]
else:
break
def shuffle_data_sources(self, generator: np.random.Generator) -> "StepExamplesIterable":
return StepExamplesIterable(
self.ex_iterable.shuffle_data_sources(generator), step=self.step, offset=self.offset
)
def shard_data_sources(self, worker_id: int, num_workers: int) -> "StepExamplesIterable":
return StepExamplesIterable(
self.ex_iterable.shard_data_sources(worker_id, num_workers), step=self.step, offset=self.offset
)
@property
def n_shards(self) -> int:
return self.ex_iterable.n_shards
class CyclingMultiSourcesExamplesIterable(_BaseExamplesIterable):
def __init__(
self,
ex_iterables: List[_BaseExamplesIterable],
stopping_strategy: Literal["first_exhausted", "all_exhausted"] = "first_exhausted",
):
super().__init__()
self.ex_iterables = ex_iterables
self.stopping_strategy = stopping_strategy
# if undersampling ("first_exhausted"), we stop as soon as one dataset is exhausted
# if oversampling ("all_exhausted"), we stop as soons as every dataset is exhausted, i.e as soon as every samples of every dataset has been visited at least once
self.bool_strategy_func = np.all if (stopping_strategy == "all_exhausted") else np.any
# TODO(QL): implement iter_arrow
def _get_indices_iterator(self):
# this is an infinite iterator to keep track of which iterator we want to pick examples from
return cycle(range(len(self.ex_iterables)))
def __iter__(self):
iterators = [_HasNextIterator(ex_iterable) for ex_iterable in self.ex_iterables]
indices_iterator = self._get_indices_iterator()
is_exhausted = np.full(len(self.ex_iterables), False)
for i in indices_iterator:
try: # let's pick one example from the iterator at index i
yield next(iterators[i])
# it will resume from the yield at the next call so that we can directly test if the iterable is exhausted and if we need to break out of the loop
if not iterators[i].hasnext():
is_exhausted[i] = True
if self.bool_strategy_func(is_exhausted):
# if the stopping criteria is met, break the main for loop
break
# otherwise reinitialise the iterator and yield the first example
iterators[i] = _HasNextIterator(self.ex_iterables[i])
except StopIteration:
# here it means that the i-th iterabledataset is empty, i.e we never have the occasion to yield an element of the i-th dataset.
# we still check if the stopping criteria is met and if we break out of the loop in case of an oversampling strategy
is_exhausted[i] = True
if self.bool_strategy_func(is_exhausted):
# if the stopping criteria is met, break the main for loop
break
def shuffle_data_sources(self, generator: np.random.Generator) -> "CyclingMultiSourcesExamplesIterable":
"""Shuffle each underlying examples iterable."""
ex_iterables = [ex_iterable.shuffle_data_sources(generator) for ex_iterable in self.ex_iterables]
return CyclingMultiSourcesExamplesIterable(ex_iterables, self.stopping_strategy)
@property
def n_shards(self) -> int:
return min(ex_iterable.n_shards for ex_iterable in self.ex_iterables)
def shard_data_sources(self, worker_id: int, num_workers: int) -> "CyclingMultiSourcesExamplesIterable":
"""Either keep only the requested shard, or propagate the request to the underlying iterable."""
return CyclingMultiSourcesExamplesIterable(
[iterable.shard_data_sources(worker_id, num_workers) for iterable in self.ex_iterables],
stopping_strategy=self.stopping_strategy,
)
class VerticallyConcatenatedMultiSourcesExamplesIterable(_BaseExamplesIterable):
"""
VerticallyConcatenatedMultiSourcesExamplesIterable simply chains the input iterables.
It doesn't require the examples iterables to always yield the same columns.
Instead, this is handled by the `IterableDataset` class or `TypedExamplesIterable`.
For information, `IterableDataset` merges the features of all the datasets to concatenate into one.
We use `IterableDataset._resolve_features` to obtain the features of all the datasets to concatenate.
Then for each example, `IterableDataset` and `TypedExamplesIterable` automatically fill missing columns with None.
This is done with `_apply_feature_types_on_example`.
"""
def __init__(self, ex_iterables: List[_BaseExamplesIterable]):
super().__init__()
self.ex_iterables = ex_iterables
if all(ex_iterable.iter_arrow is not None for ex_iterable in ex_iterables):
self.iter_arrow = self._iter_arrow
def __iter__(self):
for ex_iterable in self.ex_iterables:
yield from ex_iterable
def _iter_arrow(self):
for ex_iterable in self.ex_iterables:
yield from ex_iterable.iter_arrow()
def shuffle_data_sources(
self, generator: np.random.Generator
) -> "VerticallyConcatenatedMultiSourcesExamplesIterable":
"""Shuffle the list of examples iterable, as well as each underlying examples iterable."""
rng = deepcopy(generator)
ex_iterables = list(self.ex_iterables)
rng.shuffle(ex_iterables)
ex_iterables = [ex_iterable.shuffle_data_sources(generator) for ex_iterable in ex_iterables]
return VerticallyConcatenatedMultiSourcesExamplesIterable(ex_iterables)
@property
def n_shards(self) -> int:
return min(ex_iterable.n_shards for ex_iterable in self.ex_iterables)
def shard_data_sources(
self, worker_id: int, num_workers: int
) -> "VerticallyConcatenatedMultiSourcesExamplesIterable":
"""Either keep only the requested shard, or propagate the request to the underlying iterable."""
return VerticallyConcatenatedMultiSourcesExamplesIterable(
[iterable.shard_data_sources(worker_id, num_workers) for iterable in self.ex_iterables]
)
def _check_column_names(column_names: List[str]):
"""Check the column names to make sure they don't contain duplicates."""
counter = Counter(column_names)
if not all(count == 1 for count in counter.values()):
duplicated_columns = [col for col in counter if counter[col] > 1]
raise ValueError(
f"The examples iterables can't have duplicated columns but columns {duplicated_columns} are duplicated."
)
class HorizontallyConcatenatedMultiSourcesExamplesIterable(_BaseExamplesIterable):
"""
HorizontallyConcatenatedMultiSourcesExamplesIterable merges examples together for the input list of iterables.
It also checks that there are no duplicate columns (otherwise we don't know which one to keep).
This check is done once when yielding the first example.
However it doesn't fill missing columns with None.
Instead, this is handled by the `IterableDataset` class or `TypedExamplesIterable`.
For information, `IterableDataset` merges the features of all the datasets to concatenate into one.
We use `IterableDataset._resolve_features` to obtain the features of all the datasets to concatenate.
Then for each example, `IterableDataset` and `TypedExamplesIterable` automatically fill missing columns with None.
This is done with `_apply_feature_types_on_example`.
"""
def __init__(self, ex_iterables: List[_BaseExamplesIterable]):
super().__init__()
self.ex_iterables = ex_iterables
# TODO(QL): implement iter_arrow
def __iter__(self):
ex_iterators = [iter(ex_iterable) for ex_iterable in self.ex_iterables]
for i in itertools.count():
keys = []
examples = []
for ex_iterator in list(ex_iterators):
try:
key, example = next(ex_iterator)
keys.append(key)
examples.append(example)
except StopIteration:
ex_iterators.remove(ex_iterator)
if ex_iterators:
if i == 0:
_check_column_names([column_name for example in examples for column_name in example])
new_example = {}
for example in examples:
new_example.update(example)
new_key = "_".join(str(key) for key in keys)
yield new_key, new_example
else:
break
def shuffle_data_sources(
self, generator: np.random.Generator
) -> "HorizontallyConcatenatedMultiSourcesExamplesIterable":
"""Doesn't shuffle the wrapped examples iterable since it would break the alignment between them."""
return self
@property
def n_shards(self) -> int:
return 1
def shard_data_sources(
self, worker_id: int, num_workers: int
) -> "HorizontallyConcatenatedMultiSourcesExamplesIterable":
"""Either keep only the requested shard, or propagate the request to the underlying iterable."""
return HorizontallyConcatenatedMultiSourcesExamplesIterable(
[iterable.shard_data_sources(worker_id, num_workers) for iterable in self.ex_iterables]
)
class RandomlyCyclingMultiSourcesExamplesIterable(CyclingMultiSourcesExamplesIterable):
def __init__(
self,
ex_iterables: List[_BaseExamplesIterable],
generator: np.random.Generator,
probabilities: Optional[List[float]] = None,
stopping_strategy: Literal["first_exhausted", "all_exhausted"] = "first_exhausted",
):
super().__init__(ex_iterables, stopping_strategy)
self.generator = deepcopy(generator)
self.probabilities = probabilities
# TODO(QL): implement iter_arrow
@staticmethod
def _iter_random_indices(
rng: np.random.Generator,
num_sources: int,
random_batch_size=1000,
p: Optional[List[float]] = None,
) -> Iterator[int]:
"""Get an infinite iterator that randomly samples the index of the source to pick examples from."""
if p is None:
while True:
yield from (int(i) for i in rng.integers(0, num_sources, size=random_batch_size))
else:
while True:
yield from (int(i) for i in rng.choice(num_sources, size=random_batch_size, p=p))
def _get_indices_iterator(self):
rng = deepcopy(self.generator)
# this is an infinite iterator that randomly samples the index of the source to pick examples from
return self._iter_random_indices(rng, len(self.ex_iterables), p=self.probabilities)
def shuffle_data_sources(self, generator: np.random.Generator) -> "RandomlyCyclingMultiSourcesExamplesIterable":
"""Shuffle the data sources of each wrapped examples iterable."""
ex_iterables = [ex_iterable.shuffle_data_sources(generator) for ex_iterable in self.ex_iterables]
return RandomlyCyclingMultiSourcesExamplesIterable(
ex_iterables,
generator=generator,
probabilities=self.probabilities,
stopping_strategy=self.stopping_strategy,
)
def shard_data_sources(self, worker_id: int, num_workers: int) -> "RandomlyCyclingMultiSourcesExamplesIterable":
"""Either keep only the requested shard, or propagate the request to the underlying iterable."""
return RandomlyCyclingMultiSourcesExamplesIterable(
[iterable.shard_data_sources(worker_id, num_workers) for iterable in self.ex_iterables],
self.generator,
self.probabilities,
self.stopping_strategy,
)
class MappedExamplesIterable(_BaseExamplesIterable):
def __init__(
self,
ex_iterable: _BaseExamplesIterable,
function: Callable,
with_indices: bool = False,
input_columns: Optional[List[str]] = None,
batched: bool = False,
batch_size: Optional[int] = 1000,
drop_last_batch: bool = False,
remove_columns: Optional[List[str]] = None,
fn_kwargs: Optional[dict] = None,
formatting: Optional["FormattingConfig"] = None,
format_type="deprecated",
):
if format_type != "deprecated":
warning_msg = "'format_type' is deprecated and will be removed in the next major version of datasets. "
help_message = "Please use 'formatting=FormattingConfig(format_type=format_type)' instead."
warnings.warn(warning_msg + help_message, category=FutureWarning, stacklevel=2)
formatting = FormattingConfig(format_type=format_type)
super().__init__()
self.ex_iterable = ex_iterable
self.function = function
self.batched = batched
self.batch_size = batch_size
self.drop_last_batch = drop_last_batch
self.remove_columns = remove_columns
self.with_indices = with_indices
self.input_columns = input_columns
self.fn_kwargs = fn_kwargs or {}
self.formatting = formatting
if self.formatting and self.formatting.format_type == "arrow":
self.iter_arrow = self._iter_arrow
def __iter__(self):
if self.formatting and self.formatting.format_type == "arrow":
yield from ArrowExamplesIterable(self._iter_arrow, {})
else:
yield from self._iter()
def _iter(self):
iterator = iter(self.ex_iterable)
current_idx = 0
if self.formatting:
formatter = get_formatter(self.formatting.format_type)
format_dict = (
formatter.recursive_tensorize if isinstance(formatter, TensorFormatter) else cast_to_python_objects
)
else:
format_dict = None
if self.batched:
for key, example in iterator:
# If `batched`, first build the batch, if `batch_size` is None or <=0, then the batch is the whole dataset
iterator_batch = (
iterator
if self.batch_size is None or self.batch_size <= 0
else islice(iterator, self.batch_size - 1)
)
key_examples_list = [(key, example)] + list(iterator_batch)
keys, examples = zip(*key_examples_list)
if (
self.drop_last_batch
and self.batch_size is not None
and self.batch_size > 0
and len(examples) < self.batch_size
): # ignore last batch
return
batch = _examples_to_batch(examples)
batch = format_dict(batch) if format_dict else batch
# then apply the transform
inputs = batch
function_args = [inputs] if self.input_columns is None else [inputs[col] for col in self.input_columns]
if self.with_indices:
function_args.append([current_idx + i for i in range(len(key_examples_list))])
transformed_batch = dict(batch) # this will be updated with the function output
transformed_batch.update(self.function(*function_args, **self.fn_kwargs))
# then remove the unwanted columns
if self.remove_columns:
for c in self.remove_columns:
del transformed_batch[c]
if transformed_batch:
first_col = next(iter(transformed_batch))
bad_cols = [
col
for col in transformed_batch
if len(transformed_batch[col]) != len(transformed_batch[first_col])
]
if bad_cols:
raise ValueError(
f"Column lengths mismatch: columns {bad_cols} have length {[len(transformed_batch[col]) for col in bad_cols]} while {first_col} has length {len(transformed_batch[first_col])}."
)
# the new key is the concatenation of the examples keys from the batch
new_key = "_".join(str(key) for key in keys)
# yield one example at a time from the transformed batch
for example in _batch_to_examples(transformed_batch):
yield new_key, example
current_idx += 1
else:
for key, example in iterator:
# If not batched, we can apply the transform and yield the example directly
# first copy the example, since we might drop some keys
example = dict(example)
example = format_dict(example) if format_dict else example
# then apply the transform
inputs = example
function_args = [inputs] if self.input_columns is None else [inputs[col] for col in self.input_columns]
if self.with_indices:
function_args.append(current_idx)
transformed_example = dict(example) # this will be updated with the function output
transformed_example.update(self.function(*function_args, **self.fn_kwargs))
# then we remove the unwanted columns
if self.remove_columns:
for c in self.remove_columns:
del transformed_example[c]
yield key, transformed_example
current_idx += 1
def _iter_arrow(self) -> Iterator[Tuple[Key, pa.Table]]:
if self.ex_iterable.iter_arrow:
iterator = _batch_arrow_tables(
self.ex_iterable.iter_arrow(),
batch_size=self.batch_size if self.batched else 1,
drop_last_batch=self.drop_last_batch,
)
else:
iterator = _convert_to_arrow(
self.ex_iterable,
batch_size=self.batch_size if self.batched else 1,
drop_last_batch=self.drop_last_batch,
)
current_idx = 0
for key, pa_table in iterator:
# first build the batch
function_args = [pa_table] if self.input_columns is None else [pa_table[col] for col in self.input_columns]
if self.with_indices:
if self.batched:
function_args.append([current_idx + i for i in range(len(pa_table))])
else:
function_args.append(current_idx)
# then apply the transform
output_table = self.function(*function_args, **self.fn_kwargs)
if not isinstance(output_table, pa.Table):
raise TypeError(
f"Provided `function` which is applied to pyarrow tables returns a variable of type {type(output_table)}. Make sure provided `function` returns a a pyarrow table to update the dataset."
)
# we don't need to merge results for consistency with Dataset.map which merges iif both input and output are dicts
# then remove the unwanted columns
if self.remove_columns:
for column in self.remove_columns:
if column in output_table.column_names:
output_table = output_table.remove_column(output_table.column_names.index(column))
# return output
yield key, output_table
current_idx += len(pa_table)
def shuffle_data_sources(self, generator: np.random.Generator) -> "MappedExamplesIterable":
"""Shuffle the wrapped examples iterable."""
return MappedExamplesIterable(
self.ex_iterable.shuffle_data_sources(generator),
function=self.function,
with_indices=self.with_indices,
input_columns=self.input_columns,
batched=self.batched,
batch_size=self.batch_size,
drop_last_batch=self.drop_last_batch,
remove_columns=self.remove_columns,
fn_kwargs=self.fn_kwargs,
formatting=self.formatting,
)
def shard_data_sources(self, worker_id: int, num_workers: int) -> "MappedExamplesIterable":
"""Keep only the requested shard."""
return MappedExamplesIterable(
self.ex_iterable.shard_data_sources(worker_id, num_workers),
function=self.function,
with_indices=self.with_indices,
input_columns=self.input_columns,
batched=self.batched,
batch_size=self.batch_size,
drop_last_batch=self.drop_last_batch,
remove_columns=self.remove_columns,
fn_kwargs=self.fn_kwargs,
formatting=self.formatting,
)
@property
def n_shards(self) -> int:
return self.ex_iterable.n_shards
class FilteredExamplesIterable(_BaseExamplesIterable):
def __init__(
self,
ex_iterable: _BaseExamplesIterable,
function: Callable,
with_indices: bool = False,
input_columns: Optional[List[str]] = None,
batched: bool = False,
batch_size: Optional[int] = 1000,
fn_kwargs: Optional[dict] = None,
formatting: Optional["FormattingConfig"] = None,
format_type="deprecated",
):
if format_type != "deprecated":
warning_msg = "'format_type' is deprecated and will be removed in the next major version of datasets. "
help_message = "Please use 'formatting=FormattingConfig(format_type=format_type)' instead."
warnings.warn(warning_msg + help_message, category=FutureWarning, stacklevel=2)
formatting = FormattingConfig(format_type=format_type)
super().__init__()
self.ex_iterable = ex_iterable
self.function = function
self.batched = batched
self.batch_size = batch_size
self.with_indices = with_indices
self.input_columns = input_columns
self.fn_kwargs = fn_kwargs or {}
self.formatting = formatting
if self.formatting and self.formatting.format_type == "arrow":
self.iter_arrow = self._iter_arrow
def __iter__(self):
if self.formatting and self.formatting.format_type == "arrow":
yield from ArrowExamplesIterable(self._iter_arrow, {})
else:
yield from self._iter()
def _iter(self):
if self.formatting:
formatter = get_formatter(self.formatting.format_type)
format_dict = (
formatter.recursive_tensorize if isinstance(formatter, TensorFormatter) else cast_to_python_objects
)
else:
format_dict = None
iterator = iter(self.ex_iterable)
current_idx = 0
if self.batched:
for key, example in iterator:
# If `batched`, first build the batch, if `batch_size` is None or <=0, then the batch is the whole dataset
iterator_batch = (
iterator
if self.batch_size is None or self.batch_size <= 0
else islice(iterator, self.batch_size - 1)
)
key_examples_list = [(key, example)] + list(iterator_batch)
keys, examples = zip(*key_examples_list)
batch = _examples_to_batch(examples)
batch = format_dict(batch) if format_dict else batch
# then compute the mask for the batch
inputs = batch
function_args = [inputs] if self.input_columns is None else [inputs[col] for col in self.input_columns]
if self.with_indices:
function_args.append([current_idx + i for i in range(len(key_examples_list))])
mask = self.function(*function_args, **self.fn_kwargs)
# yield one example at a time from the batch
for key_example, to_keep in zip(key_examples_list, mask):
if to_keep:
yield key_example
current_idx += 1
else:
for key, example in iterator:
# If not batched, we can apply the filtering function direcly
example = dict(example)
inputs = format_dict(example) if format_dict else example
function_args = [inputs] if self.input_columns is None else [inputs[col] for col in self.input_columns]
if self.with_indices:
function_args.append(current_idx)
to_keep = self.function(*function_args, **self.fn_kwargs)
if to_keep:
yield key, example
current_idx += 1
def _iter_arrow(self):
if self.ex_iterable.iter_arrow:
iterator = _batch_arrow_tables(
self.ex_iterable.iter_arrow(), batch_size=self.batch_size if self.batched else 1
)
else:
iterator = _convert_to_arrow(self.ex_iterable, batch_size=self.batch_size if self.batched else 1)
current_idx = 0
for key, pa_table in iterator:
# first build the batch
function_args = [pa_table] if self.input_columns is None else [pa_table[col] for col in self.input_columns]
if self.with_indices:
if self.batched:
function_args.append([current_idx + i for i in range(len(pa_table))])
else:
function_args.append(current_idx)
# then apply the transform
mask = self.function(*function_args, **self.fn_kwargs)
# yield the filtered table
if self.batched:
yield key, pa_table.filter(mask)
elif mask.as_py() if isinstance(mask, pa.BooleanScalar) else mask:
yield key, pa_table
current_idx += len(pa_table)
def shuffle_data_sources(self, seed: Optional[int]) -> "FilteredExamplesIterable":
"""Shuffle the wrapped examples iterable."""
return FilteredExamplesIterable(
self.ex_iterable.shuffle_data_sources(seed),
function=self.function,
with_indices=self.with_indices,
input_columns=self.input_columns,
batched=self.batched,
batch_size=self.batch_size,
)
def shard_data_sources(self, worker_id: int, num_workers: int) -> "FilteredExamplesIterable":
"""Keep only the requested shard."""
return FilteredExamplesIterable(
self.ex_iterable.shard_data_sources(worker_id, num_workers),
function=self.function,
with_indices=self.with_indices,
input_columns=self.input_columns,
batched=self.batched,
batch_size=self.batch_size,
)
@property
def n_shards(self) -> int:
return self.ex_iterable.n_shards
class BufferShuffledExamplesIterable(_BaseExamplesIterable):
def __init__(self, ex_iterable: _BaseExamplesIterable, buffer_size: int, generator: np.random.Generator):
super().__init__()
self.ex_iterable = ex_iterable
self.buffer_size = buffer_size
self.generator = generator
# TODO(QL): implement iter_arrow
@staticmethod
def _iter_random_indices(rng: np.random.Generator, buffer_size: int, random_batch_size=1000) -> Iterator[int]:
while True:
yield from (int(i) for i in rng.integers(0, buffer_size, size=random_batch_size))
def __iter__(self):
buffer_size = self.buffer_size
rng = deepcopy(self.generator)
indices_iterator = self._iter_random_indices(rng, buffer_size)
# this is the shuffle buffer that we keep in memory
mem_buffer = []
for x in self.ex_iterable:
if len(mem_buffer) == buffer_size: # if the buffer is full, pick and example from it
i = next(indices_iterator)
yield mem_buffer[i]
mem_buffer[i] = x # replace the picked example by a new one
else: # otherwise, keep filling the buffer
mem_buffer.append(x)
# when we run out of examples, we shuffle the remaining examples in the buffer and yield them
rng.shuffle(mem_buffer)
yield from mem_buffer
def shuffle_data_sources(self, generator: np.random.Generator) -> "BufferShuffledExamplesIterable":
"""Shuffle the wrapped examples iterable as well as the shuffling buffer."""
return BufferShuffledExamplesIterable(
self.ex_iterable.shuffle_data_sources(generator), buffer_size=self.buffer_size, generator=generator
)
def shard_data_sources(self, worker_id: int, num_workers: int) -> "BufferShuffledExamplesIterable":
"""Keep only the requested shard."""
return BufferShuffledExamplesIterable(
self.ex_iterable.shard_data_sources(worker_id, num_workers),
buffer_size=self.buffer_size,
generator=self.generator,
)
@property
def n_shards(self) -> int:
return self.ex_iterable.n_shards
class SkipExamplesIterable(_BaseExamplesIterable):
def __init__(self, ex_iterable: _BaseExamplesIterable, n: int):
super().__init__()
self.ex_iterable = ex_iterable
self.n = n
# TODO(QL): implement iter_arrow
def __iter__(self):
yield from islice(self.ex_iterable, self.n, None)
def shuffle_data_sources(self, generator: np.random.Generator) -> "SkipExamplesIterable":
"""Doesn't shuffle the wrapped examples iterable since it would skip examples from other shards instead."""
return self
@property
def n_shards(self) -> int:
return self.ex_iterable.n_shards
class TakeExamplesIterable(_BaseExamplesIterable):
def __init__(self, ex_iterable: _BaseExamplesIterable, n: int):
super().__init__()
self.ex_iterable = ex_iterable
self.n = n
# TODO(QL): implement iter_arrow
def __iter__(self):
yield from islice(self.ex_iterable, self.n)
def shuffle_data_sources(self, generator: np.random.Generator) -> "TakeExamplesIterable":
"""Doesn't shuffle the wrapped examples iterable since it would take examples from other shards instead."""
return self
@staticmethod
def split_number(num, n):
quotient = num // n
remainder = num % n
result = [quotient] * n
for i in range(remainder):
result[i] += 1
return result
def shard_data_sources(self, worker_id: int, num_workers: int) -> "TakeExamplesIterable":
"""Keep only the requested shard."""
return TakeExamplesIterable(
self.ex_iterable.shard_data_sources(worker_id, num_workers),
n=self.split_number(self.n, num_workers)[worker_id],
)
@property
def n_shards(self) -> int:
return self.ex_iterable.n_shards
def _apply_feature_types_on_example(
example: dict, features: Features, token_per_repo_id: Dict[str, Union[str, bool, None]]
) -> dict:
example = dict(example)
# add missing columns
for column_name in features:
if column_name not in example:
example[column_name] = None
# we encode the example for ClassLabel feature types for example
encoded_example = features.encode_example(example)
# Decode example for Audio feature, e.g.
decoded_example = features.decode_example(encoded_example, token_per_repo_id=token_per_repo_id)
return decoded_example
def _apply_feature_types_on_batch(
batch: dict, features: Features, token_per_repo_id: Dict[str, Union[str, bool, None]]
) -> dict:
batch = dict(batch)
# add missing columns
n_examples = len(batch[next(iter(batch))])
for column_name in features:
if column_name not in batch:
batch[column_name] = [None] * n_examples
# we encode the batch for ClassLabel feature types for example
encoded_batch = features.encode_batch(batch)
# Decode batch for Audio feature, e.g.
decoded_batch = features.decode_batch(encoded_batch, token_per_repo_id=token_per_repo_id)
return decoded_batch
class TypedExamplesIterable(_BaseExamplesIterable):
def __init__(
self,
ex_iterable: _BaseExamplesIterable,
features: Features,
token_per_repo_id: Dict[str, Union[str, bool, None]],
):
super().__init__()
self.ex_iterable = ex_iterable
self.features = features
self.token_per_repo_id = token_per_repo_id
if self.ex_iterable.iter_arrow is not None:
self.iter_arrow = self._iter_arrow
def __iter__(self):
# Then for each example, `TypedExamplesIterable` automatically fills missing columns with None.
# This is done with `_apply_feature_types_on_example`.
for key, example in self.ex_iterable:
yield (
key,
_apply_feature_types_on_example(example, self.features, token_per_repo_id=self.token_per_repo_id),
)
def _iter_arrow(self) -> Iterator[Tuple[Key, pa.Table]]:
schema = self.features.arrow_schema
for key, pa_table in self.ex_iterable.iter_arrow():
columns = set(pa_table.column_names)
# add missing columns
for column_name in self.features:
if column_name not in columns:
col = pa.NullArray.from_buffers(pa.null(), len(pa_table), [None])
pa_table = pa_table.append_column(column_name, col)
if pa_table.schema != schema:
pa_table = cast_table_to_features(pa_table, self.features)
yield key, pa_table
def shuffle_data_sources(self, generator: np.random.Generator) -> "TypedExamplesIterable":
"""Shuffle the wrapped examples iterable."""
return TypedExamplesIterable(
self.ex_iterable.shuffle_data_sources(generator),
features=self.features,
token_per_repo_id=self.token_per_repo_id,
)
def shard_data_sources(self, worker_id: int, num_workers: int) -> "TypedExamplesIterable":
"""Keep only the requested shard."""
return TypedExamplesIterable(
self.ex_iterable.shard_data_sources(worker_id, num_workers),
features=self.features,
token_per_repo_id=self.token_per_repo_id,
)
@property
def n_shards(self) -> int:
return self.ex_iterable.n_shards
@dataclass
class FormattingConfig:
format_type: Optional[str]
def __post_init__(self):
if self.format_type == "pandas":
raise NotImplementedError(
"The 'pandas' formatting is not implemented for iterable datasets. You can use 'numpy' or 'arrow' instead."
)
@dataclass
class ShufflingConfig:
generator: np.random.Generator
_original_seed: Optional[int] = None
@dataclass
class DistributedConfig:
rank: int
world_size: int
def _maybe_add_torch_iterable_dataset_parent_class(cls):
"""Add torch.utils.data.IterableDataset as a parent class if 'torch' is available"""
if config.TORCH_AVAILABLE:
import torch.utils.data
if torch.utils.data.IterableDataset not in cls.__bases__:
cls.__bases__ += (torch.utils.data.IterableDataset,)
class IterableDataset(DatasetInfoMixin):
"""A Dataset backed by an iterable."""
def __init__(
self,
ex_iterable: _BaseExamplesIterable,
info: Optional[DatasetInfo] = None,
split: Optional[NamedSplit] = None,
formatting: Optional[FormattingConfig] = None,
shuffling: Optional[ShufflingConfig] = None,
distributed: Optional[DistributedConfig] = None,
token_per_repo_id: Optional[Dict[str, Union[str, bool, None]]] = None,
format_type="deprecated",
):
if distributed and distributed.world_size > 1 and shuffling and shuffling._original_seed is None:
raise RuntimeError(
"The dataset doesn't have a fixed random seed across nodes to shuffle and split the list of dataset shards by node. "
"Please pass e.g. `seed=42` in `.shuffle()` to make all the nodes use the same seed. "
)
if format_type != "deprecated":
warning_msg = "'format_type' is deprecated and will be removed in the next major version of datasets. "
help_message = "Please use 'formatting=FormattingConfig(format_type=format_type)' instead."
warnings.warn(warning_msg + help_message, category=FutureWarning, stacklevel=2)
formatting = FormattingConfig(format_type=format_type)
info = info.copy() if info is not None else DatasetInfo()
DatasetInfoMixin.__init__(self, info=info, split=split)
self._ex_iterable = ex_iterable
self._formatting = formatting
self._shuffling = shuffling
self._distributed = distributed
self._epoch = 0
self._token_per_repo_id: Dict[str, Union[str, bool, None]] = token_per_repo_id or {}
_maybe_add_torch_iterable_dataset_parent_class(self.__class__)
def __repr__(self):
return f"IterableDataset({{\n features: {list(self._info.features.keys()) if self._info.features is not None else 'Unknown'},\n n_shards: {self.n_shards}\n}})"
def __getstate__(self):
return self.__dict__
def __setstate__(self, d):
self.__dict__ = d
# Re-add torch iterable dataset as a parent class, since dynamically added parent classes are not kept when pickling
_maybe_add_torch_iterable_dataset_parent_class(self.__class__)
def _head(self, n=5):
return _examples_to_batch(list(self.take(n)))
def _effective_generator(self):
if self._shuffling and self._epoch == 0:
return self._shuffling.generator
elif self._shuffling:
# Create effective seed using self._epoch (we subtract in order to avoir overflow in long_scalars)
effective_seed = deepcopy(self._shuffling.generator).integers(0, 1 << 63) - self._epoch
effective_seed = (1 << 63) + effective_seed if effective_seed < 0 else effective_seed
return np.random.default_rng(effective_seed)
else:
raise ValueError("This dataset is not shuffled")
@property
def n_shards(self) -> int:
if self._distributed and self._ex_iterable.n_shards % self._distributed.world_size == 0:
return self._ex_iterable.n_shards // self._distributed.world_size
return self._ex_iterable.n_shards
def _iter_pytorch(self):
ex_iterable = self._prepare_ex_iterable_for_iteration()
# fix for fsspec when using multiprocess
_reset_fsspec_lock()
# check if there aren't too many workers
import torch.utils.data
worker_info = torch.utils.data.get_worker_info()
if self._is_main_process() and ex_iterable.n_shards < worker_info.num_workers:
logger.warning(
f"Too many dataloader workers: {worker_info.num_workers} (max is dataset.n_shards={ex_iterable.n_shards}). "
f"Stopping {worker_info.num_workers - ex_iterable.n_shards} dataloader workers."
)
logger.info(
f"To parallelize data loading, we give each process some shards (or data sources) to process. "
f"Therefore it's unnecessary to have a number of workers greater than dataset.n_shards={ex_iterable.n_shards}. "
f"To enable more parallelism, please split the dataset in more files than {ex_iterable.n_shards}."
)
# split workload
_log_prefix = f"node#{self._distributed.rank} " if self._distributed else ""
shards_indices = self._ex_iterable.split_shard_indices_by_worker(worker_info.id, worker_info.num_workers)
if shards_indices:
logger.debug(
f"{_log_prefix}dataloader worker#{worker_info.id}, ': Starting to iterate over {len(shards_indices)}/{ex_iterable.n_shards} shards."
)
ex_iterable = ex_iterable.shard_data_sources(worker_id=worker_info.id, num_workers=worker_info.num_workers)
if self._formatting:
formatter = get_formatter(self._formatting.format_type, features=self.features)
format_dict = (
formatter.recursive_tensorize if isinstance(formatter, TensorFormatter) else cast_to_python_objects
)
else:
format_dict = None
if self._formatting and (ex_iterable.iter_arrow or self._formatting == "arrow"):
if ex_iterable.iter_arrow:
iterator = _batch_arrow_tables(ex_iterable.iter_arrow(), batch_size=1)
else:
iterator = _convert_to_arrow(ex_iterable, batch_size=1)
for key, pa_table in iterator:
yield formatter.format_row(pa_table)
return
else:
for key, example in ex_iterable:
if self.features:
# `IterableDataset` automatically fills missing columns with None.
# This is done with `_apply_feature_types_on_example`.
example = _apply_feature_types_on_example(
example, self.features, token_per_repo_id=self._token_per_repo_id
)
yield format_dict(example) if format_dict else example
logger.debug(
f"{_log_prefix}dataloader worker#{worker_info.id}, ': Finished iterating over {len(shards_indices)}/{ex_iterable.n_shards} shards."
)
else:
logger.debug(
f"{_log_prefix}dataloader worker#{worker_info.id}, ': Stopping... Number of dataset shards < num_workers ({ex_iterable.n_shards}<{worker_info.num_workers})."
)
def _is_main_process(self):
if self._distributed and self._distributed.rank > 0:
return False
if "torch" in sys.modules:
import torch.utils.data
worker_info = torch.utils.data.get_worker_info()
if worker_info is not None and worker_info.id > 0:
return False
return True
def _prepare_ex_iterable_for_iteration(self) -> _BaseExamplesIterable:
if self._shuffling:
ex_iterable = self._ex_iterable.shuffle_data_sources(self._effective_generator())
else:
ex_iterable = self._ex_iterable
if self._distributed:
rank = self._distributed.rank
world_size = self._distributed.world_size
if ex_iterable.n_shards % world_size == 0:
if self._is_main_process():
n_shards_per_node = ex_iterable.n_shards // world_size
plural = "s" if n_shards_per_node > 1 else ""
logger.info(
f"Assigning {n_shards_per_node} shard{plural} (or data source{plural}) of the dataset to each node."
)
ex_iterable = ex_iterable.shard_data_sources(rank, world_size)
else:
if self._is_main_process():
logger.info(
f"Assigning 1 out of {world_size} examples of the dataset to each node. The others are skipped during the iteration."
)
logger.info(
f"It is more optimized to distribute the dataset shards (or data sources) across nodes. "
f"You can do that by using a dataset with number of shards that is a factor of world_size={world_size}. "
f"The current dataset has {ex_iterable.n_shards} which is not a factor of {world_size}"
)
ex_iterable = StepExamplesIterable(ex_iterable, step=world_size, offset=rank)
return ex_iterable
def __iter__(self):
if "torch" in sys.modules:
import torch.utils.data
worker_info = torch.utils.data.get_worker_info()
if isinstance(self, torch.utils.data.IterableDataset) and worker_info is not None:
# We're a torch.utils.data.IterableDataset in a PyTorch worker process
yield from self._iter_pytorch()
return
ex_iterable = self._prepare_ex_iterable_for_iteration()
if self._formatting:
formatter = get_formatter(self._formatting.format_type, features=self.features)
format_dict = (
formatter.recursive_tensorize if isinstance(formatter, TensorFormatter) else cast_to_python_objects
)
else:
format_dict = None
if self._formatting and (ex_iterable.iter_arrow or self._formatting.format_type == "arrow"):
if ex_iterable.iter_arrow:
iterator = _batch_arrow_tables(ex_iterable.iter_arrow(), batch_size=1)
else:
iterator = _convert_to_arrow(ex_iterable, batch_size=1)
for key, pa_table in iterator:
yield formatter.format_row(pa_table)
return
for key, example in ex_iterable:
if self.features:
# `IterableDataset` automatically fills missing columns with None.
# This is done with `_apply_feature_types_on_example`.
example = _apply_feature_types_on_example(
example, self.features, token_per_repo_id=self._token_per_repo_id
)
yield format_dict(example) if format_dict else example
def iter(self, batch_size: int, drop_last_batch: bool = False):
"""Iterate through the batches of size `batch_size`.
Args:
batch_size (:obj:`int`): size of each batch to yield.
drop_last_batch (:obj:`bool`, default `False`): Whether a last batch smaller than the batch_size should be
dropped
"""
if self._formatting:
formatter = get_formatter(self._formatting.format_type, features=self.features)
format_dict = (
formatter.recursive_tensorize if isinstance(formatter, TensorFormatter) else cast_to_python_objects
)
else:
format_dict = None
ex_iterable = self._prepare_ex_iterable_for_iteration()
if self._formatting and (ex_iterable.iter_arrow or self._formatting == "arrow"):
if ex_iterable.iter_arrow:
iterator = _batch_arrow_tables(
ex_iterable.iter_arrow(), batch_size=batch_size, drop_last_batch=drop_last_batch
)
else:
iterator = _convert_to_arrow(ex_iterable, batch_size=batch_size, drop_last_batch=drop_last_batch)
for key, pa_table in iterator:
yield formatter.format_batch(pa_table)
return
iterator = iter(ex_iterable)
for key, example in iterator:
# If batched, first build the batch
examples = [example] + [example for key, example in islice(iterator, batch_size - 1)]
if drop_last_batch and len(examples) < batch_size: # ignore last batch
return
batch = _examples_to_batch(examples)
if self.features:
# `IterableDataset` automatically fills missing columns with None.
# This is done with `_apply_feature_types_on_batch`.
batch = _apply_feature_types_on_batch(batch, self.features, token_per_repo_id=self._token_per_repo_id)
yield format_dict(batch) if format_dict else batch
@staticmethod
def from_generator(
generator: Callable,
features: Optional[Features] = None,
gen_kwargs: Optional[dict] = None,
) -> "IterableDataset":
"""Create an Iterable Dataset from a generator.
Args:
generator (`Callable`):
A generator function that `yields` examples.
features (`Features`, *optional*):
Dataset features.
gen_kwargs(`dict`, *optional*):
Keyword arguments to be passed to the `generator` callable.
You can define a sharded iterable dataset by passing the list of shards in `gen_kwargs`.
This can be used to improve shuffling and when iterating over the dataset with multiple workers.
Returns:
`IterableDataset`
Example:
```py
>>> def gen():
... yield {"text": "Good", "label": 0}
... yield {"text": "Bad", "label": 1}
...
>>> ds = IterableDataset.from_generator(gen)
```
```py
>>> def gen(shards):
... for shard in shards:
... with open(shard) as f:
... for line in f:
... yield {"line": line}
...
>>> shards = [f"data{i}.txt" for i in range(32)]
>>> ds = IterableDataset.from_generator(gen, gen_kwargs={"shards": shards})
>>> ds = ds.shuffle(seed=42, buffer_size=10_000) # shuffles the shards order + uses a shuffle buffer
>>> from torch.utils.data import DataLoader
>>> dataloader = DataLoader(ds.with_format("torch"), num_workers=4) # give each worker a subset of 32/4=8 shards
```
"""
from .io.generator import GeneratorDatasetInputStream
return GeneratorDatasetInputStream(
generator=generator,
features=features,
gen_kwargs=gen_kwargs,
streaming=True,
).read()
@staticmethod
def from_spark(
df: "pyspark.sql.DataFrame",
split: Optional[NamedSplit] = None,
features: Optional[Features] = None,
**kwargs,
) -> "IterableDataset":
"""Create an IterableDataset from Spark DataFrame. The dataset is streamed to the driver in batches.
Args:
df (`pyspark.sql.DataFrame`):
The DataFrame containing the desired data.
split (`NamedSplit`, *optional*):
Split name to be assigned to the dataset.
features (`Features`, *optional*):
Dataset features.
Returns:
[`IterableDataset`]
Example:
```py
>>> df = spark.createDataFrame(
>>> data=[[1, "Elia"], [2, "Teo"], [3, "Fang"]],
>>> columns=["id", "name"],
>>> )
>>> ds = IterableDataset.from_spark(df)
```
"""
from .io.spark import SparkDatasetReader
if sys.platform == "win32":
raise EnvironmentError("IterableDataset.from_spark is not currently supported on Windows")
return SparkDatasetReader(
df,
split=split,
features=features,
streaming=True,
**kwargs,
).read()
@staticmethod
def from_file(filename: str) -> "IterableDataset":
"""Instantiate a IterableDataset from Arrow table at filename.
Args:
filename (`str`):
File name of the dataset.
Returns:
[`IterableDataset`]
"""
pa_table_schema = read_schema_from_file(filename)
inferred_features = Features.from_arrow_schema(pa_table_schema)
ex_iterable = ArrowExamplesIterable(Dataset._generate_tables_from_cache_file, kwargs={"filename": filename})
return IterableDataset(ex_iterable=ex_iterable, info=DatasetInfo(features=inferred_features))
def with_format(
self,
type: Optional[str] = None,
) -> "IterableDataset":
"""
Return a dataset with the specified format.
Supported formats: "arrow", or None for regular python objects.
The other formats are currently not implemented.
Args:
type (`str`, optional, default None): if set to "torch", the returned dataset
will be a subclass of torch.utils.data.IterableDataset to be used in a DataLoader
"""
type = get_format_type_from_alias(type)
# TODO(QL): add format_kwargs
# TODO(QL): add format_columns and return_all_columns
# TODO(QL): add pandas format
return IterableDataset(
ex_iterable=self._ex_iterable,
info=self._info.copy(),
split=self._split,
formatting=FormattingConfig(format_type=type),
shuffling=copy.deepcopy(self._shuffling),
distributed=copy.deepcopy(self._distributed),
token_per_repo_id=self._token_per_repo_id,
)
def map(
self,
function: Optional[Callable] = None,
with_indices: bool = False,
input_columns: Optional[Union[str, List[str]]] = None,
batched: bool = False,
batch_size: Optional[int] = 1000,
drop_last_batch: bool = False,
remove_columns: Optional[Union[str, List[str]]] = None,
features: Optional[Features] = None,
fn_kwargs: Optional[dict] = None,
) -> "IterableDataset":
"""
Apply a function to all the examples in the iterable dataset (individually or in batches) and update them.
If your function returns a column that already exists, then it overwrites it.
The function is applied on-the-fly on the examples when iterating over the dataset.
You can specify whether the function should be batched or not with the `batched` parameter:
- If batched is `False`, then the function takes 1 example in and should return 1 example.
An example is a dictionary, e.g. `{"text": "Hello there !"}`.
- If batched is `True` and `batch_size` is 1, then the function takes a batch of 1 example as input and can return a batch with 1 or more examples.
A batch is a dictionary, e.g. a batch of 1 example is {"text": ["Hello there !"]}.
- If batched is `True` and `batch_size` is `n` > 1, then the function takes a batch of `n` examples as input and can return a batch with `n` examples, or with an arbitrary number of examples.
Note that the last batch may have less than `n` examples.
A batch is a dictionary, e.g. a batch of `n` examples is `{"text": ["Hello there !"] * n}`.
Args:
function (`Callable`, *optional*, defaults to `None`):
Function applied on-the-fly on the examples when you iterate on the dataset.
It must have one of the following signatures:
- `function(example: Dict[str, Any]) -> Dict[str, Any]` if `batched=False` and `with_indices=False`
- `function(example: Dict[str, Any], idx: int) -> Dict[str, Any]` if `batched=False` and `with_indices=True`
- `function(batch: Dict[str, List]) -> Dict[str, List]` if `batched=True` and `with_indices=False`
- `function(batch: Dict[str, List], indices: List[int]) -> Dict[str, List]` if `batched=True` and `with_indices=True`
For advanced usage, the function can also return a `pyarrow.Table`.
Moreover if your function returns nothing (`None`), then `map` will run your function and return the dataset unchanged.
If no function is provided, default to identity function: `lambda x: x`.
with_indices (`bool`, defaults to `False`):
Provide example indices to `function`. Note that in this case the signature of `function` should be `def function(example, idx[, rank]): ...`.
input_columns (`Optional[Union[str, List[str]]]`, defaults to `None`):
The columns to be passed into `function`
as positional arguments. If `None`, a dict mapping to all formatted columns is passed as one argument.
batched (`bool`, defaults to `False`):
Provide batch of examples to `function`.
batch_size (`int`, *optional*, defaults to `1000`):
Number of examples per batch provided to `function` if `batched=True`.
`batch_size <= 0` or `batch_size == None` then provide the full dataset as a single batch to `function`.
drop_last_batch (`bool`, defaults to `False`):
Whether a last batch smaller than the batch_size should be
dropped instead of being processed by the function.
remove_columns (`[List[str]]`, *optional*, defaults to `None`):
Remove a selection of columns while doing the mapping.
Columns will be removed before updating the examples with the output of `function`, i.e. if `function` is adding
columns with names in `remove_columns`, these columns will be kept.
features (`[Features]`, *optional*, defaults to `None`):
Feature types of the resulting dataset.
fn_kwargs (`Dict`, *optional*, default `None`):
Keyword arguments to be passed to `function`.
Example:
```py
>>> from datasets import load_dataset
>>> ds = load_dataset("rotten_tomatoes", split="train", streaming=True)
>>> def add_prefix(example):
... example["text"] = "Review: " + example["text"]
... return example
>>> ds = ds.map(add_prefix)
>>> list(ds.take(3))
[{'label': 1,
'text': 'Review: the rock is destined to be the 21st century\'s new " conan " and that he\'s going to make a splash even greater than arnold schwarzenegger , jean-claud van damme or steven segal .'},
{'label': 1,
'text': 'Review: the gorgeously elaborate continuation of " the lord of the rings " trilogy is so huge that a column of words cannot adequately describe co-writer/director peter jackson\'s expanded vision of j . r . r . tolkien\'s middle-earth .'},
{'label': 1, 'text': 'Review: effective but too-tepid biopic'}]
```
"""
if isinstance(input_columns, str):
input_columns = [input_columns]
if isinstance(remove_columns, str):
remove_columns = [remove_columns]
if function is None:
function = identity_func
if fn_kwargs is None:
fn_kwargs = {}
ex_iterable = MappedExamplesIterable(
TypedExamplesIterable(self._ex_iterable, self._info.features, token_per_repo_id=self._token_per_repo_id)
if self._info.features is not None
else self._ex_iterable,
function=function,
with_indices=with_indices,
input_columns=input_columns,
batched=batched,
batch_size=batch_size,
drop_last_batch=drop_last_batch,
remove_columns=remove_columns,
fn_kwargs=fn_kwargs,
formatting=self._formatting,
)
info = self.info.copy()
info.features = features
return IterableDataset(
ex_iterable=ex_iterable,
info=info,
split=self._split,
formatting=self._formatting,
shuffling=copy.deepcopy(self._shuffling),
distributed=copy.deepcopy(self._distributed),
token_per_repo_id=self._token_per_repo_id,
)
def filter(
self,
function: Optional[Callable] = None,
with_indices=False,
input_columns: Optional[Union[str, List[str]]] = None,
batched: bool = False,
batch_size: Optional[int] = 1000,
fn_kwargs: Optional[dict] = None,
) -> "IterableDataset":
"""Apply a filter function to all the elements so that the dataset only includes examples according to the filter function.
The filtering is done on-the-fly when iterating over the dataset.
Args:
function (`Callable`):
Callable with one of the following signatures:
- `function(example: Dict[str, Any]) -> bool` if `with_indices=False, batched=False`
- `function(example: Dict[str, Any], indices: int) -> bool` if `with_indices=True, batched=False`
- `function(example: Dict[str, List]) -> List[bool]` if `with_indices=False, batched=True`
- `function(example: Dict[str, List], indices: List[int]) -> List[bool]` if `with_indices=True, batched=True`
If no function is provided, defaults to an always True function: `lambda x: True`.
with_indices (`bool`, defaults to `False`):
Provide example indices to `function`. Note that in this case the signature of `function` should be `def function(example, idx): ...`.
input_columns (`str` or `List[str]`, *optional*):
The columns to be passed into `function` as
positional arguments. If `None`, a dict mapping to all formatted columns is passed as one argument.
batched (`bool`, defaults to `False`):
Provide batch of examples to `function`.
batch_size (`int`, *optional*, default `1000`):
Number of examples per batch provided to `function` if `batched=True`.
fn_kwargs (`Dict`, *optional*, default `None`):
Keyword arguments to be passed to `function`.
Example:
```py
>>> from datasets import load_dataset
>>> ds = load_dataset("rotten_tomatoes", split="train", streaming=True)
>>> ds = ds.filter(lambda x: x["label"] == 0)
>>> list(ds.take(3))
[{'label': 0, 'movie_review': 'simplistic , silly and tedious .'},
{'label': 0,
'movie_review': "it's so laddish and juvenile , only teenage boys could possibly find it funny ."},
{'label': 0,
'movie_review': 'exploitative and largely devoid of the depth or sophistication that would make watching such a graphic treatment of the crimes bearable .'}]
```
"""
if isinstance(input_columns, str):
input_columns = [input_columns]
# TODO(QL): keep the features (right now if we keep it it would call decode_example again on an already decoded example)
info = copy.deepcopy(self._info)
info.features = None
# We need the examples to be decoded for certain feature types like Image or Audio, so we use TypedExamplesIterable here
ex_iterable = FilteredExamplesIterable(
TypedExamplesIterable(self._ex_iterable, self._info.features, token_per_repo_id=self._token_per_repo_id)
if self._info.features is not None
else self._ex_iterable,
function=function,
with_indices=with_indices,
input_columns=input_columns,
batched=batched,
batch_size=batch_size,
fn_kwargs=fn_kwargs,
formatting=self._formatting,
)
return IterableDataset(
ex_iterable=ex_iterable,
info=info,
split=self._split,
formatting=self._formatting,
shuffling=copy.deepcopy(self._shuffling),
distributed=copy.deepcopy(self._distributed),
token_per_repo_id=self._token_per_repo_id,
)
def shuffle(
self, seed=None, generator: Optional[np.random.Generator] = None, buffer_size: int = 1000
) -> "IterableDataset":
"""
Randomly shuffles the elements of this dataset.
This dataset fills a buffer with `buffer_size` elements, then randomly samples elements from this buffer,
replacing the selected elements with new elements. For perfect shuffling, a buffer size greater than or
equal to the full size of the dataset is required.
For instance, if your dataset contains 10,000 elements but `buffer_size` is set to 1000, then `shuffle` will
initially select a random element from only the first 1000 elements in the buffer. Once an element is
selected, its space in the buffer is replaced by the next (i.e. 1,001-st) element,
maintaining the 1000 element buffer.
If the dataset is made of several shards, it also does shuffle the order of the shards.
However if the order has been fixed by using [`~datasets.IterableDataset.skip`] or [`~datasets.IterableDataset.take`]
then the order of the shards is kept unchanged.
Args:
seed (`int`, *optional*, defaults to `None`):
Random seed that will be used to shuffle the dataset.
It is used to sample from the shuffle buffer and also to shuffle the data shards.
generator (`numpy.random.Generator`, *optional*):
Numpy random Generator to use to compute the permutation of the dataset rows.
If `generator=None` (default), uses `np.random.default_rng` (the default BitGenerator (PCG64) of NumPy).
buffer_size (`int`, defaults to `1000`):
Size of the buffer.
Example:
```py
>>> from datasets import load_dataset
>>> ds = load_dataset("rotten_tomatoes", split="train", streaming=True)
>>> list(ds.take(3))
[{'label': 1,
'text': 'the rock is destined to be the 21st century\'s new " conan " and that he\'s going to make a splash even greater than arnold schwarzenegger , jean-claud van damme or steven segal .'},
{'label': 1,
'text': 'the gorgeously elaborate continuation of " the lord of the rings " trilogy is so huge that a column of words cannot adequately describe co-writer/director peter jackson\'s expanded vision of j . r . r . tolkien\'s middle-earth .'},
{'label': 1, 'text': 'effective but too-tepid biopic'}]
>>> shuffled_ds = ds.shuffle(seed=42)
>>> list(shuffled_ds.take(3))
[{'label': 1,
'text': "a sports movie with action that's exciting on the field and a story you care about off it ."},
{'label': 1,
'text': 'at its best , the good girl is a refreshingly adult take on adultery . . .'},
{'label': 1,
'text': "sam jones became a very lucky filmmaker the day wilco got dropped from their record label , proving that one man's ruin may be another's fortune ."}]
```
"""
if generator is None:
generator = np.random.default_rng(seed)
else:
generator = deepcopy(generator)
shuffling = ShufflingConfig(generator=generator, _original_seed=seed)
return IterableDataset(
ex_iterable=BufferShuffledExamplesIterable(
self._ex_iterable, buffer_size=buffer_size, generator=generator
).shuffle_data_sources(generator),
info=self._info.copy(),
split=self._split,
formatting=self._formatting,
shuffling=shuffling,
distributed=copy.deepcopy(self._distributed),
token_per_repo_id=self._token_per_repo_id,
)
def set_epoch(self, epoch: int):
self._epoch = epoch
def skip(self, n) -> "IterableDataset":
"""
Create a new [`IterableDataset`] that skips the first `n` elements.
Args:
n (`int`):
Number of elements to skip.
Example:
```py
>>> from datasets import load_dataset
>>> ds = load_dataset("rotten_tomatoes", split="train", streaming=True)
>>> list(ds.take(3))
[{'label': 1,
'text': 'the rock is destined to be the 21st century\'s new " conan " and that he\'s going to make a splash even greater than arnold schwarzenegger , jean-claud van damme or steven segal .'},
{'label': 1,
'text': 'the gorgeously elaborate continuation of " the lord of the rings " trilogy is so huge that a column of words cannot adequately describe co-writer/director peter jackson\'s expanded vision of j . r . r . tolkien\'s middle-earth .'},
{'label': 1, 'text': 'effective but too-tepid biopic'}]
>>> ds = ds.skip(1)
>>> list(ds.take(3))
[{'label': 1,
'text': 'the gorgeously elaborate continuation of " the lord of the rings " trilogy is so huge that a column of words cannot adequately describe co-writer/director peter jackson\'s expanded vision of j . r . r . tolkien\'s middle-earth .'},
{'label': 1, 'text': 'effective but too-tepid biopic'},
{'label': 1,
'text': 'if you sometimes like to go to the movies to have fun , wasabi is a good place to start .'}]
```
"""
ex_iterable = SkipExamplesIterable(self._ex_iterable, n)
return IterableDataset(
ex_iterable=ex_iterable,
info=self._info.copy(),
split=self._split,
formatting=self._formatting,
shuffling=copy.deepcopy(self._shuffling),
distributed=copy.deepcopy(self._distributed),
token_per_repo_id=self._token_per_repo_id,
)
def take(self, n) -> "IterableDataset":
"""
Create a new [`IterableDataset`] with only the first `n` elements.
Args:
n (`int`):
Number of elements to take.
Example:
```py
>>> from datasets import load_dataset
>>> ds = load_dataset("rotten_tomatoes", split="train", streaming=True)
>>> small_ds = ds.take(2)
>>> list(small_ds)
[{'label': 1,
'text': 'the rock is destined to be the 21st century\'s new " conan " and that he\'s going to make a splash even greater than arnold schwarzenegger , jean-claud van damme or steven segal .'},
{'label': 1,
'text': 'the gorgeously elaborate continuation of " the lord of the rings " trilogy is so huge that a column of words cannot adequately describe co-writer/director peter jackson\'s expanded vision of j . r . r . tolkien\'s middle-earth .'}]
```
"""
ex_iterable = TakeExamplesIterable(self._ex_iterable, n)
return IterableDataset(
ex_iterable=ex_iterable,
info=self._info.copy(),
split=self._split,
formatting=self._formatting,
shuffling=copy.deepcopy(self._shuffling),
distributed=copy.deepcopy(self._distributed),
token_per_repo_id=self._token_per_repo_id,
)
@property
def column_names(self) -> Optional[List[str]]:
"""Names of the columns in the dataset.
Example:
```py
>>> from datasets import load_dataset
>>> ds = load_dataset("rotten_tomatoes", split="validation", streaming=True)
>>> ds.column_names
['text', 'label']
```
"""
return list(self._info.features.keys()) if self._info.features is not None else None
def add_column(self, name: str, column: Union[list, np.array]) -> "IterableDataset":
"""Add column to Dataset.
Args:
name (str): Column name.
column (list or np.array): Column data to be added.
Returns:
`IterableDataset`
"""
return self.map(partial(add_column_fn, name=name, column=column), with_indices=True)
def rename_column(self, original_column_name: str, new_column_name: str) -> "IterableDataset":
"""
Rename a column in the dataset, and move the features associated to the original column under the new column
name.
Args:
original_column_name (`str`):
Name of the column to rename.
new_column_name (`str`):
New name for the column.
Returns:
`IterableDataset`: A copy of the dataset with a renamed column.
Example:
```py
>>> from datasets import load_dataset
>>> ds = load_dataset("rotten_tomatoes", split="train", streaming=True)
>>> next(iter(ds))
{'label': 1,
'text': 'the rock is destined to be the 21st century\'s new " conan " and that he\'s going to make a splash even greater than arnold schwarzenegger , jean-claud van damme or steven segal .'}
>>> ds = ds.rename_column("text", "movie_review")
>>> next(iter(ds))
{'label': 1,
'movie_review': 'the rock is destined to be the 21st century\'s new " conan " and that he\'s going to make a splash even greater than arnold schwarzenegger , jean-claud van damme or steven segal .'}
```
"""
return self.rename_columns({original_column_name: new_column_name})
def rename_columns(self, column_mapping: Dict[str, str]) -> "IterableDataset":
"""
Rename several columns in the dataset, and move the features associated to the original columns under
the new column names.
Args:
column_mapping (`Dict[str, str]`): A mapping of columns to rename to their new names
Returns:
`IterableDataset`: A copy of the dataset with renamed columns
"""
original_features = self._info.features.copy() if self._info.features else None
ds_iterable = self.map(
partial(_rename_columns_fn, column_mapping=column_mapping), remove_columns=list(column_mapping)
)
if original_features is not None:
ds_iterable._info.features = Features(
{
column_mapping[col] if col in column_mapping.keys() else col: feature
for col, feature in original_features.items()
}
)
# check that it's still valid, especially with regard to task templates
try:
ds_iterable._info.copy()
except ValueError:
ds_iterable._info.task_templates = None
return ds_iterable
def remove_columns(self, column_names: Union[str, List[str]]) -> "IterableDataset":
"""
Remove one or several column(s) in the dataset and the features associated to them.
The removal is done on-the-fly on the examples when iterating over the dataset.
Args:
column_names (`Union[str, List[str]]`):
Name of the column(s) to remove.
Returns:
`IterableDataset`: A copy of the dataset object without the columns to remove.
Example:
```py
>>> from datasets import load_dataset
>>> ds = load_dataset("rotten_tomatoes", split="train", streaming=True)
>>> next(iter(ds))
{'text': 'the rock is destined to be the 21st century\'s new " conan " and that he\'s going to make a splash even greater than arnold schwarzenegger , jean-claud van damme or steven segal .', 'label': 1}
>>> ds = ds.remove_columns("label")
>>> next(iter(ds))
{'text': 'the rock is destined to be the 21st century\'s new " conan " and that he\'s going to make a splash even greater than arnold schwarzenegger , jean-claud van damme or steven segal .'}
```
"""
original_features = self._info.features.copy() if self._info.features else None
ds_iterable = self.map(remove_columns=column_names)
if original_features is not None:
ds_iterable._info.features = original_features.copy()
for col, _ in original_features.items():
if col in column_names:
del ds_iterable._info.features[col]
# check that it's still valid, especially with regard to task templates
try:
ds_iterable._info.copy()
except ValueError:
ds_iterable._info.task_templates = None
return ds_iterable
def select_columns(self, column_names: Union[str, List[str]]) -> "IterableDataset":
"""Select one or several column(s) in the dataset and the features
associated to them. The selection is done on-the-fly on the examples
when iterating over the dataset.
Args:
column_names (`Union[str, List[str]]`):
Name of the column(s) to select.
Returns:
`IterableDataset`: A copy of the dataset object with selected columns.
Example:
```py
>>> from datasets import load_dataset
>>> ds = load_dataset("rotten_tomatoes", split="train", streaming=True)
>>> next(iter(ds))
{'text': 'the rock is destined to be the 21st century\'s new " conan " and that he\'s going to make a splash even greater than arnold schwarzenegger , jean-claud van damme or steven segal .', 'label': 1}
>>> ds = ds.select_columns("text")
>>> next(iter(ds))
{'text': 'the rock is destined to be the 21st century\'s new " conan " and that he\'s going to make a splash even greater than arnold schwarzenegger , jean-claud van damme or steven segal .'}
```
"""
if isinstance(column_names, str):
column_names = [column_names]
if self._info:
info = copy.deepcopy(self._info)
if self._info.features is not None:
for column_name in column_names:
if column_name not in self._info.features:
raise ValueError(
f"Column name {column_name} not in the "
"dataset. Columns in the dataset: "
f"{list(self._info.features.keys())}."
)
info.features = Features({c: info.features[c] for c in column_names})
# check that it's still valid, especially with regard to task templates
try:
info.copy()
except ValueError:
info.task_templates = None
ex_iterable = SelectColumnsIterable(self._ex_iterable, column_names)
return IterableDataset(
ex_iterable=ex_iterable,
info=info,
split=self._split,
formatting=self._formatting,
shuffling=self._shuffling,
distributed=self._distributed,
token_per_repo_id=self._token_per_repo_id,
)
def cast_column(self, column: str, feature: FeatureType) -> "IterableDataset":
"""Cast column to feature for decoding.
Args:
column (`str`):
Column name.
feature (`Feature`):
Target feature.
Returns:
`IterableDataset`
Example:
```py
>>> from datasets import load_dataset, Audio
>>> ds = load_dataset("PolyAI/minds14", name="en-US", split="train", streaming=True)
>>> ds.features
{'audio': Audio(sampling_rate=8000, mono=True, decode=True, id=None),
'english_transcription': Value(dtype='string', id=None),
'intent_class': ClassLabel(num_classes=14, names=['abroad', 'address', 'app_error', 'atm_limit', 'balance', 'business_loan', 'card_issues', 'cash_deposit', 'direct_debit', 'freeze', 'high_value_payment', 'joint_account', 'latest_transactions', 'pay_bill'], id=None),
'lang_id': ClassLabel(num_classes=14, names=['cs-CZ', 'de-DE', 'en-AU', 'en-GB', 'en-US', 'es-ES', 'fr-FR', 'it-IT', 'ko-KR', 'nl-NL', 'pl-PL', 'pt-PT', 'ru-RU', 'zh-CN'], id=None),
'path': Value(dtype='string', id=None),
'transcription': Value(dtype='string', id=None)}
>>> ds = ds.cast_column("audio", Audio(sampling_rate=16000))
>>> ds.features
{'audio': Audio(sampling_rate=16000, mono=True, decode=True, id=None),
'english_transcription': Value(dtype='string', id=None),
'intent_class': ClassLabel(num_classes=14, names=['abroad', 'address', 'app_error', 'atm_limit', 'balance', 'business_loan', 'card_issues', 'cash_deposit', 'direct_debit', 'freeze', 'high_value_payment', 'joint_account', 'latest_transactions', 'pay_bill'], id=None),
'lang_id': ClassLabel(num_classes=14, names=['cs-CZ', 'de-DE', 'en-AU', 'en-GB', 'en-US', 'es-ES', 'fr-FR', 'it-IT', 'ko-KR', 'nl-NL', 'pl-PL', 'pt-PT', 'ru-RU', 'zh-CN'], id=None),
'path': Value(dtype='string', id=None),
'transcription': Value(dtype='string', id=None)}
```
"""
info = self._info.copy()
info.features[column] = feature
# check that it's still valid, especially with regard to task templates
try:
info.copy()
except ValueError:
info.task_templates = None
return IterableDataset(
ex_iterable=self._ex_iterable,
info=info,
split=self._split,
formatting=self._formatting,
shuffling=copy.deepcopy(self._shuffling),
distributed=copy.deepcopy(self._distributed),
token_per_repo_id=self._token_per_repo_id,
)
def cast(
self,
features: Features,
) -> "IterableDataset":
"""
Cast the dataset to a new set of features.
Args:
features ([`Features`]):
New features to cast the dataset to.
The name of the fields in the features must match the current column names.
The type of the data must also be convertible from one type to the other.
For non-trivial conversion, e.g. `string` <-> `ClassLabel` you should use [`~Dataset.map`] to update the Dataset.
Returns:
`IterableDataset`: A copy of the dataset with casted features.
Example:
```py
>>> from datasets import load_dataset
>>> ds = load_dataset("rotten_tomatoes", split="train", streaming=True)
>>> ds.features
{'label': ClassLabel(num_classes=2, names=['neg', 'pos'], id=None),
'text': Value(dtype='string', id=None)}
>>> new_features = ds.features.copy()
>>> new_features["label"] = ClassLabel(names=["bad", "good"])
>>> new_features["text"] = Value("large_string")
>>> ds = ds.cast(new_features)
>>> ds.features
{'label': ClassLabel(num_classes=2, names=['bad', 'good'], id=None),
'text': Value(dtype='large_string', id=None)}
```
"""
info = self._info.copy()
info.features = features
# check that it's still valid, especially with regard to task templates
try:
info.copy()
except ValueError:
info.task_templates = None
return IterableDataset(
ex_iterable=self._ex_iterable,
info=info,
split=self._split,
formatting=self._formatting,
shuffling=copy.deepcopy(self._shuffling),
distributed=copy.deepcopy(self._distributed),
token_per_repo_id=self._token_per_repo_id,
)
def _step(self, step: int, offset: int) -> "IterableDataset":
ex_iterable = StepExamplesIterable(self._ex_iterable, step=step, offset=offset)
return IterableDataset(
ex_iterable=ex_iterable,
info=self._info.copy(),
split=self._split,
formatting=self._formatting,
shuffling=copy.deepcopy(self._shuffling),
distributed=copy.deepcopy(self._distributed),
token_per_repo_id=self._token_per_repo_id,
)
def _resolve_features(self):
if self.features is not None:
return self
elif isinstance(self._ex_iterable, TypedExamplesIterable):
features = self._ex_iterable.features
else:
features = _infer_features_from_batch(self.with_format(None)._head())
info = self.info.copy()
info.features = features
return IterableDataset(
ex_iterable=self._ex_iterable,
info=info,
split=self._split,
formatting=self._formatting,
shuffling=copy.deepcopy(self._shuffling),
distributed=copy.deepcopy(self._distributed),
token_per_repo_id=self._token_per_repo_id,
)
def _concatenate_iterable_datasets(
dsets: List[IterableDataset],
info: Optional[DatasetInfo] = None,
split: Optional[NamedSplit] = None,
axis: int = 0,
) -> IterableDataset:
"""
Converts a list of `IterableDataset` with the same schema into a single `IterableDataset`.
Missing data are filled with None values.
<Added version="2.4.0"/>
Args:
dsets (`List[datasets.IterableDataset]`): List of Datasets to concatenate.
info (`DatasetInfo`, optional): Dataset information, like description, citation, etc.
split (`NamedSplit`, optional): Name of the dataset split.
axis (``{0, 1}``, default ``0``, meaning over rows):
Axis to concatenate over, where ``0`` means over rows (vertically) and ``1`` means over columns
(horizontally).
*New in version 1.6.0*
Example:
```py
>>> ds3 = _concatenate_iterable_datasets([ds1, ds2])
```
"""
dsets = [d._resolve_features() for d in dsets]
# Perform checks (and a potentional cast if axis=0)
if axis == 0:
_check_if_features_can_be_aligned([dset.features for dset in dsets])
else:
_check_column_names([col_name for dset in dsets for col_name in dset.features])
# TODO: improve this to account for a mix of ClassLabel and Value for example
# right now it would keep the type of the first dataset in the list
features = Features(
{k: v for features in _align_features([dset.features for dset in dsets]) for k, v in features.items()}
)
ex_iterables = [d._ex_iterable for d in dsets]
if axis == 0:
ex_iterable = VerticallyConcatenatedMultiSourcesExamplesIterable(ex_iterables)
else:
ex_iterable = HorizontallyConcatenatedMultiSourcesExamplesIterable(ex_iterables)
# Set new info - we update the features
# setting the features also ensures to fill missing columns with None
if info is None:
info = DatasetInfo.from_merge([d.info for d in dsets])
else:
info = info.copy()
info.features = features
# Get all the auth tokens per repository - in case the datasets come from different private repositories
token_per_repo_id = {repo_id: token for dataset in dsets for repo_id, token in dataset._token_per_repo_id.items()}
# Return new daset
return IterableDataset(ex_iterable=ex_iterable, info=info, split=split, token_per_repo_id=token_per_repo_id)
def _interleave_iterable_datasets(
datasets: List[IterableDataset],
probabilities: Optional[List[float]] = None,
seed: Optional[int] = None,
info: Optional[DatasetInfo] = None,
split: Optional[NamedSplit] = None,
stopping_strategy: Literal["first_exhausted", "all_exhausted"] = "first_exhausted",
) -> IterableDataset:
"""
Interleave several iterable datasets (sources) into a single iterable dataset.
The new iterable dataset alternates between the sources to yield examples.
If `probabilities = None` (default) the iterable dataset will cycles through the sources in order for each next example in the iteration.
If `probabilities` is not `None, the iterable dataset will sample a random source according to the provided probabilities for each next examples in the iteration.
<Added version="2.4.0"/>
Args:
datasets (`List[IterableDataset]`): list of datasets to interleave
probabilities (`List[float]`, optional, default None): If specified, the new iterable dataset samples
examples from one source at a time according to these probabilities.
seed (`int`, optional, default None): The random seed used to choose a source for each example.
stopping_strategy (`str`, defaults to `first_exhausted`):
Two strategies are proposed right now.
By default, `first_exhausted` is an undersampling strategy, i.e the dataset construction is stopped as soon as one dataset has ran out of samples.
If the strategy is `all_exhausted`, we use an oversampling strategy, i.e the dataset construction is stopped as soon as every samples of every dataset has been added at least once.
Note that if the strategy is `all_exhausted`, the interleaved dataset size can get enormous:
- with no probabilities, the resulting dataset will have max_length_datasets*nb_dataset samples.
- with given probabilities, the resulting dataset will have more samples if some datasets have really low probability of visiting.
Output:
`datasets.IterableDataset`
"""
datasets = [d._resolve_features() for d in datasets]
# Perform checks
_check_if_features_can_be_aligned([dset.features for dset in datasets])
# TODO: improve this to account for a mix of ClassLabel and Value for example
# right now it would keep the type of the first dataset in the list
features = Features(
{k: v for features in _align_features([dset.features for dset in datasets]) for k, v in features.items()}
)
ex_iterables = [d._ex_iterable for d in datasets]
# Use cycling or random cycling of sources
if probabilities is None:
ex_iterable = CyclingMultiSourcesExamplesIterable(ex_iterables, stopping_strategy=stopping_strategy)
else:
generator = np.random.default_rng(seed)
ex_iterable = RandomlyCyclingMultiSourcesExamplesIterable(
ex_iterables, generator=generator, probabilities=probabilities, stopping_strategy=stopping_strategy
)
# Set new info - we update the features
# setting the features also ensures to fill missing columns with None
if info is None:
info = DatasetInfo.from_merge([d.info for d in datasets])
else:
info = info.copy()
info.features = features
# Get all the auth tokens per repository - in case the datasets come from different private repositories
token_per_repo_id = {
repo_id: token for dataset in datasets for repo_id, token in dataset._token_per_repo_id.items()
}
# Return new daset
return IterableDataset(ex_iterable=ex_iterable, info=info, split=split, token_per_repo_id=token_per_repo_id)
def _split_by_node_iterable_dataset(dataset: IterableDataset, rank: int, world_size: int) -> IterableDataset:
"""
Split an iterable dataset for the node at rank `rank` in a pool of nodes of size `world_size`.
If the dataset has a number of shards that is a factor of `world_size` (i.e. if `dataset.n_shards % world_size == 0`),
then the shards are evenly assigned across the nodes, which is the most optimized.
Otherwise, each node keeps 1 example out of `world_size`, skipping the other examples.
Args:
dataset ([`IterableDataset`]):
The iterable dataset to split by node.
rank (`int`):
Rank of the current node.
world_size (`int`):
Total number of nodes.
Returns:
[`IterableDataset`]: The iterable dataset to be used on the node at rank `rank`.
"""
if dataset._distributed:
world_size = world_size * dataset._distributed.world_size
rank = world_size * dataset._distributed.rank + rank
distributed = DistributedConfig(rank=rank, world_size=world_size)
return IterableDataset(
ex_iterable=dataset._ex_iterable,
info=dataset._info.copy(),
split=dataset._split,
formatting=dataset._formatting,
shuffling=copy.deepcopy(dataset._shuffling),
distributed=distributed,
token_per_repo_id=dataset._token_per_repo_id,
)
| datasets/src/datasets/iterable_dataset.py/0 | {
"file_path": "datasets/src/datasets/iterable_dataset.py",
"repo_id": "datasets",
"token_count": 46487
} | 64 |
from dataclasses import dataclass, field
from typing import ClassVar, Dict
from ..features import Features, Value
from .base import TaskTemplate
@dataclass(frozen=True)
class Summarization(TaskTemplate):
# `task` is not a ClassVar since we want it to be part of the `asdict` output for JSON serialization
task: str = field(default="summarization", metadata={"include_in_asdict_even_if_is_default": True})
input_schema: ClassVar[Features] = Features({"text": Value("string")})
label_schema: ClassVar[Features] = Features({"summary": Value("string")})
text_column: str = "text"
summary_column: str = "summary"
@property
def column_mapping(self) -> Dict[str, str]:
return {self.text_column: "text", self.summary_column: "summary"}
| datasets/src/datasets/tasks/summarization.py/0 | {
"file_path": "datasets/src/datasets/tasks/summarization.py",
"repo_id": "datasets",
"token_count": 254
} | 65 |
# Copyright 2020 Optuna, Hugging Face
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
""" Logging utilities. """
import logging
import os
from logging import (
CRITICAL, # NOQA
DEBUG, # NOQA
ERROR, # NOQA
FATAL, # NOQA
INFO, # NOQA
NOTSET, # NOQA
WARN, # NOQA
WARNING, # NOQA
)
from typing import Optional
from .tqdm import ( # noqa: F401 # imported for backward compatibility
disable_progress_bar,
enable_progress_bar,
is_progress_bar_enabled,
tqdm,
)
log_levels = {
"debug": logging.DEBUG,
"info": logging.INFO,
"warning": logging.WARNING,
"error": logging.ERROR,
"critical": logging.CRITICAL,
}
_default_log_level = logging.WARNING
def _get_default_logging_level():
"""
If DATASETS_VERBOSITY env var is set to one of the valid choices return that as the new default level.
If it is not - fall back to ``_default_log_level``
"""
env_level_str = os.getenv("DATASETS_VERBOSITY", None)
if env_level_str:
if env_level_str in log_levels:
return log_levels[env_level_str]
else:
logging.getLogger().warning(
f"Unknown option DATASETS_VERBOSITY={env_level_str}, "
f"has to be one of: { ', '.join(log_levels.keys()) }"
)
return _default_log_level
def _get_library_name() -> str:
return __name__.split(".")[0]
def _get_library_root_logger() -> logging.Logger:
return logging.getLogger(_get_library_name())
def _configure_library_root_logger() -> None:
# Apply our default configuration to the library root logger.
library_root_logger = _get_library_root_logger()
library_root_logger.addHandler(logging.StreamHandler())
library_root_logger.setLevel(_get_default_logging_level())
def _reset_library_root_logger() -> None:
library_root_logger = _get_library_root_logger()
library_root_logger.setLevel(logging.NOTSET)
def get_logger(name: Optional[str] = None) -> logging.Logger:
"""Return a logger with the specified name.
This function can be used in dataset scripts.
"""
if name is None:
name = _get_library_name()
return logging.getLogger(name)
def get_verbosity() -> int:
"""Return the current level for the HuggingFace datasets library's root logger.
Returns:
Logging level, e.g., `datasets.logging.DEBUG` and `datasets.logging.INFO`.
<Tip>
HuggingFace datasets library has following logging levels:
- `datasets.logging.CRITICAL`, `datasets.logging.FATAL`
- `datasets.logging.ERROR`
- `datasets.logging.WARNING`, `datasets.logging.WARN`
- `datasets.logging.INFO`
- `datasets.logging.DEBUG`
</Tip>
"""
return _get_library_root_logger().getEffectiveLevel()
def set_verbosity(verbosity: int) -> None:
"""Set the level for the Hugging Face Datasets library's root logger.
Args:
verbosity:
Logging level, e.g., `datasets.logging.DEBUG` and `datasets.logging.INFO`.
"""
_get_library_root_logger().setLevel(verbosity)
def set_verbosity_info():
"""Set the level for the Hugging Face datasets library's root logger to `INFO`.
This will display most of the logging information and tqdm bars.
Shortcut to `datasets.logging.set_verbosity(datasets.logging.INFO)`.
"""
return set_verbosity(INFO)
def set_verbosity_warning():
"""Set the level for the Hugging Face datasets library's root logger to `WARNING`.
This will display only the warning and errors logging information and tqdm bars.
Shortcut to `datasets.logging.set_verbosity(datasets.logging.WARNING)`.
"""
return set_verbosity(WARNING)
def set_verbosity_debug():
"""Set the level for the Hugging Face datasets library's root logger to `DEBUG`.
This will display all the logging information and tqdm bars.
Shortcut to `datasets.logging.set_verbosity(datasets.logging.DEBUG)`.
"""
return set_verbosity(DEBUG)
def set_verbosity_error():
"""Set the level for the Hugging Face datasets library's root logger to `ERROR`.
This will display only the errors logging information and tqdm bars.
Shortcut to `datasets.logging.set_verbosity(datasets.logging.ERROR)`.
"""
return set_verbosity(ERROR)
def disable_propagation() -> None:
"""Disable propagation of the library log outputs.
Note that log propagation is disabled by default.
"""
_get_library_root_logger().propagate = False
def enable_propagation() -> None:
"""Enable propagation of the library log outputs.
Please disable the Hugging Face datasets library's default handler to prevent double logging if the root logger has
been configured.
"""
_get_library_root_logger().propagate = True
# Configure the library root logger at the module level (singleton-like)
_configure_library_root_logger()
| datasets/src/datasets/utils/logging.py/0 | {
"file_path": "datasets/src/datasets/utils/logging.py",
"repo_id": "datasets",
"token_count": 1934
} | 66 |
import os
from typing import Dict, List, Tuple, TypeVar, Union
T = TypeVar("T")
ListLike = Union[List[T], Tuple[T, ...]]
NestedDataStructureLike = Union[T, List[T], Dict[str, T]]
PathLike = Union[str, bytes, os.PathLike]
| datasets/src/datasets/utils/typing.py/0 | {
"file_path": "datasets/src/datasets/utils/typing.py",
"repo_id": "datasets",
"token_count": 84
} | 67 |
import json
import tarfile
import numpy as np
import pytest
from datasets import Audio, DownloadManager, Features, Image, Value
from datasets.packaged_modules.webdataset.webdataset import WebDataset
from ..utils import require_pil, require_sndfile
@pytest.fixture
def image_wds_file(tmp_path, image_file):
json_file = tmp_path / "data.json"
filename = tmp_path / "file.tar"
num_examples = 3
with json_file.open("w", encoding="utf-8") as f:
f.write(json.dumps({"caption": "this is an image"}))
with tarfile.open(str(filename), "w") as f:
for example_idx in range(num_examples):
f.add(json_file, f"{example_idx:05d}.json")
f.add(image_file, f"{example_idx:05d}.jpg")
return str(filename)
@pytest.fixture
def audio_wds_file(tmp_path, audio_file):
json_file = tmp_path / "data.json"
filename = tmp_path / "file.tar"
num_examples = 3
with json_file.open("w", encoding="utf-8") as f:
f.write(json.dumps({"transcript": "this is a transcript"}))
with tarfile.open(str(filename), "w") as f:
for example_idx in range(num_examples):
f.add(json_file, f"{example_idx:05d}.json")
f.add(audio_file, f"{example_idx:05d}.wav")
return str(filename)
@pytest.fixture
def bad_wds_file(tmp_path, image_file, text_file):
json_file = tmp_path / "data.json"
filename = tmp_path / "bad_file.tar"
with json_file.open("w", encoding="utf-8") as f:
f.write(json.dumps({"caption": "this is an image"}))
with tarfile.open(str(filename), "w") as f:
f.add(image_file)
f.add(json_file)
return str(filename)
@require_pil
def test_image_webdataset(image_wds_file):
import PIL.Image
data_files = {"train": [image_wds_file]}
webdataset = WebDataset(data_files=data_files)
split_generators = webdataset._split_generators(DownloadManager())
assert webdataset.info.features == Features(
{
"__key__": Value("string"),
"__url__": Value("string"),
"json": {"caption": Value("string")},
"jpg": Image(),
}
)
assert len(split_generators) == 1
split_generator = split_generators[0]
assert split_generator.name == "train"
generator = webdataset._generate_examples(**split_generator.gen_kwargs)
_, examples = zip(*generator)
assert len(examples) == 3
assert isinstance(examples[0]["json"], dict)
assert isinstance(examples[0]["json"]["caption"], str)
assert isinstance(examples[0]["jpg"], dict) # keep encoded to avoid unecessary copies
encoded = webdataset.info.features.encode_example(examples[0])
decoded = webdataset.info.features.decode_example(encoded)
assert isinstance(decoded["json"], dict)
assert isinstance(decoded["json"]["caption"], str)
assert isinstance(decoded["jpg"], PIL.Image.Image)
@require_sndfile
def test_audio_webdataset(audio_wds_file):
data_files = {"train": [audio_wds_file]}
webdataset = WebDataset(data_files=data_files)
split_generators = webdataset._split_generators(DownloadManager())
assert webdataset.info.features == Features(
{
"__key__": Value("string"),
"__url__": Value("string"),
"json": {"transcript": Value("string")},
"wav": Audio(),
}
)
assert len(split_generators) == 1
split_generator = split_generators[0]
assert split_generator.name == "train"
generator = webdataset._generate_examples(**split_generator.gen_kwargs)
_, examples = zip(*generator)
assert len(examples) == 3
assert isinstance(examples[0]["json"], dict)
assert isinstance(examples[0]["json"]["transcript"], str)
assert isinstance(examples[0]["wav"], dict)
assert isinstance(examples[0]["wav"]["bytes"], bytes) # keep encoded to avoid unecessary copies
encoded = webdataset.info.features.encode_example(examples[0])
decoded = webdataset.info.features.decode_example(encoded)
assert isinstance(decoded["json"], dict)
assert isinstance(decoded["json"]["transcript"], str)
assert isinstance(decoded["wav"], dict)
assert isinstance(decoded["wav"]["array"], np.ndarray)
def test_webdataset_errors_on_bad_file(bad_wds_file):
data_files = {"train": [bad_wds_file]}
webdataset = WebDataset(data_files=data_files)
with pytest.raises(ValueError):
webdataset._split_generators(DownloadManager())
@require_pil
def test_webdataset_with_features(image_wds_file):
import PIL.Image
data_files = {"train": [image_wds_file]}
features = Features(
{
"__key__": Value("string"),
"__url__": Value("string"),
"json": {"caption": Value("string"), "additional_field": Value("int64")},
"jpg": Image(),
}
)
webdataset = WebDataset(data_files=data_files, features=features)
split_generators = webdataset._split_generators(DownloadManager())
assert webdataset.info.features == features
split_generator = split_generators[0]
assert split_generator.name == "train"
generator = webdataset._generate_examples(**split_generator.gen_kwargs)
_, example = next(iter(generator))
encoded = webdataset.info.features.encode_example(example)
decoded = webdataset.info.features.decode_example(encoded)
assert decoded["json"]["additional_field"] is None
assert isinstance(decoded["json"], dict)
assert isinstance(decoded["json"]["caption"], str)
assert isinstance(decoded["jpg"], PIL.Image.Image)
| datasets/tests/packaged_modules/test_webdataset.py/0 | {
"file_path": "datasets/tests/packaged_modules/test_webdataset.py",
"repo_id": "datasets",
"token_count": 2263
} | 68 |
import json
import os
import pickle
import subprocess
from functools import partial
from pathlib import Path
from tempfile import gettempdir
from textwrap import dedent
from types import FunctionType
from unittest import TestCase
from unittest.mock import patch
import numpy as np
import pytest
from multiprocess import Pool
import datasets
from datasets import config
from datasets.fingerprint import Hasher, fingerprint_transform
from datasets.table import InMemoryTable
from .utils import (
require_not_windows,
require_regex,
require_spacy,
require_spacy_model,
require_tiktoken,
require_torch,
require_transformers,
)
class Foo:
def __init__(self, foo):
self.foo = foo
def __call__(self):
return self.foo
class DatasetChild(datasets.Dataset):
@fingerprint_transform(inplace=False)
def func1(self, new_fingerprint, *args, **kwargs):
return DatasetChild(self.data, fingerprint=new_fingerprint)
@fingerprint_transform(inplace=False)
def func2(self, new_fingerprint, *args, **kwargs):
return DatasetChild(self.data, fingerprint=new_fingerprint)
class UnpicklableCallable:
def __init__(self, callable):
self.callable = callable
def __call__(self, *args, **kwargs):
if self.callable is not None:
return self.callable(*args, **kwargs)
def __getstate__(self):
raise pickle.PicklingError()
if config.TORCH_AVAILABLE:
import torch
import torch.nn as nn
import torch.nn.functional as F
class TorchModule(nn.Module):
def __init__(self):
super().__init__()
self.conv1 = nn.Conv2d(1, 20, 5)
self.conv2 = nn.Conv2d(20, 20, 5)
def forward(self, x):
x = F.relu(self.conv1(x))
return F.relu(self.conv2(x))
else:
TorchModule = None
class TokenizersHashTest(TestCase):
@require_transformers
@pytest.mark.integration
def test_hash_tokenizer(self):
from transformers import AutoTokenizer
def encode(x):
return tokenizer(x)
# TODO: add hash consistency tests across sessions
tokenizer = AutoTokenizer.from_pretrained("bert-base-uncased")
hash1 = Hasher.hash(tokenizer)
hash1_lambda = Hasher.hash(lambda x: tokenizer(x))
hash1_encode = Hasher.hash(encode)
tokenizer = AutoTokenizer.from_pretrained("bert-base-cased")
hash2 = Hasher.hash(tokenizer)
hash2_lambda = Hasher.hash(lambda x: tokenizer(x))
hash2_encode = Hasher.hash(encode)
tokenizer = AutoTokenizer.from_pretrained("bert-base-uncased")
hash3 = Hasher.hash(tokenizer)
hash3_lambda = Hasher.hash(lambda x: tokenizer(x))
hash3_encode = Hasher.hash(encode)
self.assertEqual(hash1, hash3)
self.assertNotEqual(hash1, hash2)
self.assertEqual(hash1_lambda, hash3_lambda)
self.assertNotEqual(hash1_lambda, hash2_lambda)
self.assertEqual(hash1_encode, hash3_encode)
self.assertNotEqual(hash1_encode, hash2_encode)
@require_transformers
@pytest.mark.integration
def test_hash_tokenizer_with_cache(self):
from transformers import AutoTokenizer
tokenizer = AutoTokenizer.from_pretrained("gpt2")
hash1 = Hasher.hash(tokenizer)
tokenizer("Hello world !") # call once to change the tokenizer's cache
hash2 = Hasher.hash(tokenizer)
self.assertEqual(hash1, hash2)
@require_regex
def test_hash_regex(self):
import regex
pat = regex.Regex("foo")
hash1 = Hasher.hash(pat)
pat = regex.Regex("bar")
hash2 = Hasher.hash(pat)
pat = regex.Regex("foo")
hash3 = Hasher.hash(pat)
self.assertEqual(hash1, hash3)
self.assertNotEqual(hash1, hash2)
class RecurseHashTest(TestCase):
def test_recurse_hash_for_function(self):
def func():
return foo
foo = [0]
hash1 = Hasher.hash(func)
foo = [1]
hash2 = Hasher.hash(func)
foo = [0]
hash3 = Hasher.hash(func)
self.assertEqual(hash1, hash3)
self.assertNotEqual(hash1, hash2)
def test_hash_ignores_line_definition_of_function(self):
def func():
pass
hash1 = Hasher.hash(func)
def func():
pass
hash2 = Hasher.hash(func)
self.assertEqual(hash1, hash2)
def test_recurse_hash_for_class(self):
hash1 = Hasher.hash(Foo([0]))
hash2 = Hasher.hash(Foo([1]))
hash3 = Hasher.hash(Foo([0]))
self.assertEqual(hash1, hash3)
self.assertNotEqual(hash1, hash2)
def test_recurse_hash_for_method(self):
hash1 = Hasher.hash(Foo([0]).__call__)
hash2 = Hasher.hash(Foo([1]).__call__)
hash3 = Hasher.hash(Foo([0]).__call__)
self.assertEqual(hash1, hash3)
self.assertNotEqual(hash1, hash2)
def test_hash_ipython_function(self):
def create_ipython_func(co_filename, returned_obj):
def func():
return returned_obj
code = func.__code__
# Use _create_code from dill in order to make it work for different python versions
code = code.replace(co_filename=co_filename)
return FunctionType(code, func.__globals__, func.__name__, func.__defaults__, func.__closure__)
co_filename, returned_obj = "<ipython-input-2-e0383a102aae>", [0]
hash1 = Hasher.hash(create_ipython_func(co_filename, returned_obj))
co_filename, returned_obj = "<ipython-input-2-e0383a102aae>", [1]
hash2 = Hasher.hash(create_ipython_func(co_filename, returned_obj))
co_filename, returned_obj = "<ipython-input-5-713f6613acf3>", [0]
hash3 = Hasher.hash(create_ipython_func(co_filename, returned_obj))
self.assertEqual(hash1, hash3)
self.assertNotEqual(hash1, hash2)
co_filename, returned_obj = os.path.join(gettempdir(), "ipykernel_12345", "321456789.py"), [0]
hash4 = Hasher.hash(create_ipython_func(co_filename, returned_obj))
co_filename, returned_obj = os.path.join(gettempdir(), "ipykernel_12345", "321456789.py"), [1]
hash5 = Hasher.hash(create_ipython_func(co_filename, returned_obj))
co_filename, returned_obj = os.path.join(gettempdir(), "ipykernel_12345", "654123987.py"), [0]
hash6 = Hasher.hash(create_ipython_func(co_filename, returned_obj))
self.assertEqual(hash4, hash6)
self.assertNotEqual(hash4, hash5)
def test_recurse_hash_for_function_with_shuffled_globals(self):
foo, bar = [0], [1]
def func():
return foo, bar
func.__module__ = "__main__"
def globalvars_mock1_side_effect(func, *args, **kwargs):
return {"foo": foo, "bar": bar}
def globalvars_mock2_side_effect(func, *args, **kwargs):
return {"bar": bar, "foo": foo}
with patch("dill.detect.globalvars", side_effect=globalvars_mock1_side_effect) as globalvars_mock1:
hash1 = Hasher.hash(func)
self.assertGreater(globalvars_mock1.call_count, 0)
with patch("dill.detect.globalvars", side_effect=globalvars_mock2_side_effect) as globalvars_mock2:
hash2 = Hasher.hash(func)
self.assertGreater(globalvars_mock2.call_count, 0)
self.assertEqual(hash1, hash2)
class HashingTest(TestCase):
def test_hash_simple(self):
hash1 = Hasher.hash("hello")
hash2 = Hasher.hash("hello")
hash3 = Hasher.hash("there")
self.assertEqual(hash1, hash2)
self.assertNotEqual(hash1, hash3)
def test_hash_class_instance(self):
hash1 = Hasher.hash(Foo("hello"))
hash2 = Hasher.hash(Foo("hello"))
hash3 = Hasher.hash(Foo("there"))
self.assertEqual(hash1, hash2)
self.assertNotEqual(hash1, hash3)
def test_hash_update(self):
hasher = Hasher()
for x in ["hello", Foo("hello")]:
hasher.update(x)
hash1 = hasher.hexdigest()
hasher = Hasher()
for x in ["hello", Foo("hello")]:
hasher.update(x)
hash2 = hasher.hexdigest()
hasher = Hasher()
for x in ["there", Foo("there")]:
hasher.update(x)
hash3 = hasher.hexdigest()
self.assertEqual(hash1, hash2)
self.assertNotEqual(hash1, hash3)
def test_hash_unpicklable(self):
with self.assertRaises(pickle.PicklingError):
Hasher.hash(UnpicklableCallable(Foo("hello")))
def test_hash_same_strings(self):
string = "abc"
obj1 = [string, string] # two strings have the same ids
obj2 = [string, string]
obj3 = json.loads(f'["{string}", "{string}"]') # two strings have different ids
self.assertIs(obj1[0], string)
self.assertIs(obj1[0], obj1[1])
self.assertIs(obj2[0], string)
self.assertIs(obj2[0], obj2[1])
self.assertIsNot(obj3[0], string)
self.assertIsNot(obj3[0], obj3[1])
hash1 = Hasher.hash(obj1)
hash2 = Hasher.hash(obj2)
hash3 = Hasher.hash(obj3)
self.assertEqual(hash1, hash2)
self.assertEqual(hash1, hash3)
def test_set_stable(self):
rng = np.random.default_rng(42)
set_ = {rng.random() for _ in range(10_000)}
expected_hash = Hasher.hash(set_)
assert expected_hash == Pool(1).apply_async(partial(Hasher.hash, set(set_))).get()
def test_set_doesnt_depend_on_order(self):
set_ = set("abc")
hash1 = Hasher.hash(set_)
set_ = set("def")
hash2 = Hasher.hash(set_)
set_ = set("cba")
hash3 = Hasher.hash(set_)
self.assertEqual(hash1, hash3)
self.assertNotEqual(hash1, hash2)
@require_tiktoken
def test_hash_tiktoken_encoding(self):
import tiktoken
enc = tiktoken.get_encoding("gpt2")
hash1 = Hasher.hash(enc)
enc = tiktoken.get_encoding("r50k_base")
hash2 = Hasher.hash(enc)
enc = tiktoken.get_encoding("gpt2")
hash3 = Hasher.hash(enc)
self.assertEqual(hash1, hash3)
self.assertNotEqual(hash1, hash2)
@require_torch
def test_hash_torch_tensor(self):
import torch
t = torch.tensor([1.0])
hash1 = Hasher.hash(t)
t = torch.tensor([2.0])
hash2 = Hasher.hash(t)
t = torch.tensor([1.0])
hash3 = Hasher.hash(t)
self.assertEqual(hash1, hash3)
self.assertNotEqual(hash1, hash2)
@require_torch
def test_hash_torch_generator(self):
import torch
t = torch.Generator(device="cpu").manual_seed(42)
hash1 = Hasher.hash(t)
t = t = torch.Generator(device="cpu").manual_seed(50)
hash2 = Hasher.hash(t)
t = t = torch.Generator(device="cpu").manual_seed(42)
hash3 = Hasher.hash(t)
self.assertEqual(hash1, hash3)
self.assertNotEqual(hash1, hash2)
@require_spacy
@require_spacy_model("en_core_web_sm")
@require_spacy_model("fr_core_news_sm")
@pytest.mark.integration
def test_hash_spacy_model(self):
import spacy
nlp = spacy.load("en_core_web_sm")
hash1 = Hasher.hash(nlp)
nlp = spacy.load("fr_core_news_sm")
hash2 = Hasher.hash(nlp)
nlp = spacy.load("en_core_web_sm")
hash3 = Hasher.hash(nlp)
self.assertEqual(hash1, hash3)
self.assertNotEqual(hash1, hash2)
@require_not_windows
@require_torch
def test_hash_torch_compiled_function(self):
import torch
def f(x):
return torch.sin(x) + torch.cos(x)
hash1 = Hasher.hash(f)
f = torch.compile(f)
hash2 = Hasher.hash(f)
self.assertEqual(hash1, hash2)
@require_not_windows
@require_torch
def test_hash_torch_compiled_module(self):
m = TorchModule()
next(iter(m.parameters())).data.fill_(1.0)
hash1 = Hasher.hash(m)
m = torch.compile(m)
hash2 = Hasher.hash(m)
m = TorchModule()
next(iter(m.parameters())).data.fill_(2.0)
m = torch.compile(m)
hash3 = Hasher.hash(m)
self.assertEqual(hash1, hash2)
self.assertNotEqual(hash1, hash3)
self.assertNotEqual(hash2, hash3)
@pytest.mark.integration
def test_move_script_doesnt_change_hash(tmp_path: Path):
dir1 = tmp_path / "dir1"
dir2 = tmp_path / "dir2"
dir1.mkdir()
dir2.mkdir()
script_filename = "script.py"
code = dedent(
"""
from datasets.fingerprint import Hasher
def foo():
pass
print(Hasher.hash(foo))
"""
)
script_path1 = dir1 / script_filename
script_path2 = dir2 / script_filename
with script_path1.open("w") as f:
f.write(code)
with script_path2.open("w") as f:
f.write(code)
fingerprint1 = subprocess.check_output(["python", str(script_path1)])
fingerprint2 = subprocess.check_output(["python", str(script_path2)])
assert fingerprint1 == fingerprint2
def test_fingerprint_in_multiprocessing():
data = {"a": [0, 1, 2]}
dataset = DatasetChild(InMemoryTable.from_pydict(data))
expected_fingerprint = dataset.func1()._fingerprint
assert expected_fingerprint == dataset.func1()._fingerprint
assert expected_fingerprint != dataset.func2()._fingerprint
with Pool(2) as p:
assert expected_fingerprint == p.apply_async(dataset.func1).get()._fingerprint
assert expected_fingerprint != p.apply_async(dataset.func2).get()._fingerprint
def test_fingerprint_when_transform_version_changes():
data = {"a": [0, 1, 2]}
class DummyDatasetChild(datasets.Dataset):
@fingerprint_transform(inplace=False)
def func(self, new_fingerprint):
return DummyDatasetChild(self.data, fingerprint=new_fingerprint)
fingeprint_no_version = DummyDatasetChild(InMemoryTable.from_pydict(data)).func()
class DummyDatasetChild(datasets.Dataset):
@fingerprint_transform(inplace=False, version="1.0.0")
def func(self, new_fingerprint):
return DummyDatasetChild(self.data, fingerprint=new_fingerprint)
fingeprint_1 = DummyDatasetChild(InMemoryTable.from_pydict(data)).func()
class DummyDatasetChild(datasets.Dataset):
@fingerprint_transform(inplace=False, version="2.0.0")
def func(self, new_fingerprint):
return DummyDatasetChild(self.data, fingerprint=new_fingerprint)
fingeprint_2 = DummyDatasetChild(InMemoryTable.from_pydict(data)).func()
assert len({fingeprint_no_version, fingeprint_1, fingeprint_2}) == 3
def test_dependency_on_dill():
# AttributeError: module 'dill._dill' has no attribute 'stack'
hasher = Hasher()
hasher.update(lambda x: x)
| datasets/tests/test_fingerprint.py/0 | {
"file_path": "datasets/tests/test_fingerprint.py",
"repo_id": "datasets",
"token_count": 6783
} | 69 |
import re
import tempfile
from pathlib import Path
import pytest
import yaml
from datasets.utils.readme import ReadMe
# @pytest.fixture
# def example_yaml_structure():
example_yaml_structure = yaml.safe_load(
"""\
name: ""
allow_empty: false
allow_empty_text: true
subsections:
- name: "Dataset Card for X" # First-level markdown heading
allow_empty: false
allow_empty_text: true
subsections:
- name: "Table of Contents"
allow_empty: false
allow_empty_text: false
subsections: null
- name: "Dataset Description"
allow_empty: false
allow_empty_text: false
subsections:
- name: "Dataset Summary"
allow_empty: false
allow_empty_text: false
subsections: null
- name: "Supported Tasks and Leaderboards"
allow_empty: true
allow_empty_text: true
subsections: null
- name: Languages
allow_empty: false
allow_empty_text: true
subsections: null
"""
)
CORRECT_DICT = {
"name": "root",
"text": "",
"is_empty_text": True,
"subsections": [
{
"name": "Dataset Card for My Dataset",
"text": "",
"is_empty_text": True,
"subsections": [
{"name": "Table of Contents", "text": "Some text here.", "is_empty_text": False, "subsections": []},
{
"name": "Dataset Description",
"text": "Some text here.",
"is_empty_text": False,
"subsections": [
{
"name": "Dataset Summary",
"text": "Some text here.",
"is_empty_text": False,
"subsections": [],
},
{
"name": "Supported Tasks and Leaderboards",
"text": "",
"is_empty_text": True,
"subsections": [],
},
{"name": "Languages", "text": "Language Text", "is_empty_text": False, "subsections": []},
],
},
],
}
],
}
README_CORRECT = """\
---
language:
- zh
- en
---
# Dataset Card for My Dataset
## Table of Contents
Some text here.
## Dataset Description
Some text here.
### Dataset Summary
Some text here.
### Supported Tasks and Leaderboards
### Languages
Language Text
"""
README_CORRECT_FOUR_LEVEL = """\
---
language:
- zh
- en
---
# Dataset Card for My Dataset
## Table of Contents
Some text here.
## Dataset Description
Some text here.
### Dataset Summary
Some text here.
#### Extra Ignored Subsection
### Supported Tasks and Leaderboards
### Languages
Language Text
"""
CORRECT_DICT_FOUR_LEVEL = {
"name": "root",
"text": "",
"is_empty_text": True,
"subsections": [
{
"name": "Dataset Card for My Dataset",
"text": "",
"is_empty_text": True,
"subsections": [
{"name": "Table of Contents", "text": "Some text here.", "is_empty_text": False, "subsections": []},
{
"name": "Dataset Description",
"text": "Some text here.",
"is_empty_text": False,
"subsections": [
{
"name": "Dataset Summary",
"text": "Some text here.",
"is_empty_text": False,
"subsections": [
{
"name": "Extra Ignored Subsection",
"text": "",
"is_empty_text": True,
"subsections": [],
}
],
},
{
"name": "Supported Tasks and Leaderboards",
"text": "",
"is_empty_text": True,
"subsections": [],
},
{"name": "Languages", "text": "Language Text", "is_empty_text": False, "subsections": []},
],
},
],
}
],
}
README_EMPTY_YAML = """\
---
---
# Dataset Card for My Dataset
## Table of Contents
Some text here.
## Dataset Description
Some text here.
### Dataset Summary
Some text here.
### Supported Tasks and Leaderboards
### Languages
Language Text
"""
EXPECTED_ERROR_README_EMPTY_YAML = (
"The following issues were found for the README at `{path}`:\n-\tEmpty YAML markers are present in the README."
)
README_NO_YAML = """\
# Dataset Card for My Dataset
## Table of Contents
Some text here.
## Dataset Description
Some text here.
### Dataset Summary
Some text here.
### Supported Tasks and Leaderboards
### Languages
Language Text
"""
EXPECTED_ERROR_README_NO_YAML = (
"The following issues were found for the README at `{path}`:\n-\tNo YAML markers are present in the README."
)
README_INCORRECT_YAML = """\
---
# Dataset Card for My Dataset
## Table of Contents
Some text here.
## Dataset Description
Some text here.
### Dataset Summary
Some text here.
### Supported Tasks and Leaderboards
### Languages
Language Text
"""
EXPECTED_ERROR_README_INCORRECT_YAML = "The following issues were found for the README at `{path}`:\n-\tOnly the start of YAML tags present in the README."
README_MISSING_TEXT = """\
---
language:
- zh
- en
---
# Dataset Card for My Dataset
## Table of Contents
Some text here.
## Dataset Description
Some text here.
### Dataset Summary
### Supported Tasks and Leaderboards
### Languages
Language Text
"""
EXPECTED_ERROR_README_MISSING_TEXT = "The following issues were found for the README at `{path}`:\n-\tExpected some content in section `Dataset Summary` but it is empty.\n-\tExpected some text in section `Dataset Summary` but it is empty (text in subsections are ignored)."
README_NONE_SUBSECTION = """\
---
language:
- zh
- en
---
# Dataset Card for My Dataset
"""
EXPECTED_ERROR_README_NONE_SUBSECTION = "The following issues were found for the README at `{path}`:\n-\tExpected some content in section `Dataset Card for My Dataset` but it is empty.\n-\tSection `Dataset Card for My Dataset` expected the following subsections: `Table of Contents`, `Dataset Description`. Found 'None'."
README_MISSING_SUBSECTION = """\
---
language:
- zh
- en
---
# Dataset Card for My Dataset
## Table of Contents
Some text here.
## Dataset Description
Some text here.
### Dataset Summary
Some text here.
### Languages
Language Text
"""
EXPECTED_ERROR_README_MISSING_SUBSECTION = "The following issues were found for the README at `{path}`:\n-\tSection `Dataset Description` is missing subsection: `Supported Tasks and Leaderboards`."
README_MISSING_CONTENT = """\
---
language:
- zh
- en
---
# Dataset Card for My Dataset
## Table of Contents
Some text here.
## Dataset Description
Some text here.
### Dataset Summary
Some text here.
### Supported Tasks and Leaderboards
### Languages
"""
EXPECTED_ERROR_README_MISSING_CONTENT = "The following issues were found for the README at `{path}`:\n-\tExpected some content in section `Languages` but it is empty."
README_MISSING_FIRST_LEVEL = """\
---
language:
- zh
- en
---
## Table of Contents
Some text here.
## Dataset Description
Some text here.
### Dataset Summary
Some text here.
### Supported Tasks and Leaderboards
### Languages
Language Text
"""
EXPECTED_ERROR_README_MISSING_FIRST_LEVEL = "The following issues were found for the README at `{path}`:\n-\tThe README has no first-level headings. One heading is expected. Skipping further validation for this README."
README_MULTIPLE_WRONG_FIRST_LEVEL = """\
---
language:
- zh
- en
---
# Dataset Card for My Dataset
## Table of Contents
Some text here.
## Dataset Description
Some text here.
### Dataset Summary
Some text here.
### Supported Tasks and Leaderboards
### Languages
Language Text
# Dataset Card My Dataset
"""
EXPECTED_ERROR_README_MULTIPLE_WRONG_FIRST_LEVEL = "The following issues were found for the README at `{path}`:\n-\tThe README has several first-level headings: `Dataset Card for My Dataset`, `Dataset Card My Dataset`. Only one heading is expected. Skipping further validation for this README."
README_WRONG_FIRST_LEVEL = """\
---
language:
- zh
- en
---
# Dataset Card My Dataset
## Table of Contents
Some text here.
## Dataset Description
Some text here.
### Dataset Summary
Some text here.
### Supported Tasks and Leaderboards
### Languages
Language Text
"""
EXPECTED_ERROR_README_WRONG_FIRST_LEVEL = "The following issues were found for the README at `{path}`:\n-\tNo first-level heading starting with `Dataset Card for` found in README. Skipping further validation for this README."
README_EMPTY = ""
EXPECTED_ERROR_README_EMPTY = "The following issues were found for the README at `{path}`:\n-\tThe README has no first-level headings. One heading is expected. Skipping further validation for this README.\n-\tNo YAML markers are present in the README."
README_MULTIPLE_SAME_HEADING_1 = """\
---
language:
- zh
- en
---
# Dataset Card for My Dataset
# Dataset Card for My Dataset
## Table of Contents
Some text here.
## Dataset Description
Some text here.
### Dataset Summary
Some text here.
### Supported Tasks and Leaderboards
### Languages
Language Text
"""
EXPECTED_ERROR_README_MULTIPLE_SAME_HEADING_1 = "The following issues were found while parsing the README at `{path}`:\n-\tMultiple sections with the same heading `Dataset Card for My Dataset` have been found. Please keep only one of these sections."
@pytest.mark.parametrize(
"readme_md, expected_dict",
[
(README_CORRECT, CORRECT_DICT),
(README_CORRECT_FOUR_LEVEL, CORRECT_DICT_FOUR_LEVEL),
],
)
def test_readme_from_string_correct(readme_md, expected_dict):
assert ReadMe.from_string(readme_md, example_yaml_structure).to_dict() == expected_dict
@pytest.mark.parametrize(
"readme_md, expected_error",
[
(README_NO_YAML, EXPECTED_ERROR_README_NO_YAML),
(README_EMPTY_YAML, EXPECTED_ERROR_README_EMPTY_YAML),
(README_INCORRECT_YAML, EXPECTED_ERROR_README_INCORRECT_YAML),
(README_EMPTY, EXPECTED_ERROR_README_EMPTY),
(README_NONE_SUBSECTION, EXPECTED_ERROR_README_NONE_SUBSECTION),
(README_MISSING_FIRST_LEVEL, EXPECTED_ERROR_README_MISSING_FIRST_LEVEL),
(README_MISSING_SUBSECTION, EXPECTED_ERROR_README_MISSING_SUBSECTION),
(README_MISSING_TEXT, EXPECTED_ERROR_README_MISSING_TEXT),
(README_WRONG_FIRST_LEVEL, EXPECTED_ERROR_README_WRONG_FIRST_LEVEL),
(README_MULTIPLE_WRONG_FIRST_LEVEL, EXPECTED_ERROR_README_MULTIPLE_WRONG_FIRST_LEVEL),
(README_MISSING_CONTENT, EXPECTED_ERROR_README_MISSING_CONTENT),
],
)
def test_readme_from_string_validation_errors(readme_md, expected_error):
with pytest.raises(ValueError, match=re.escape(expected_error.format(path="root"))):
readme = ReadMe.from_string(readme_md, example_yaml_structure)
readme.validate()
@pytest.mark.parametrize(
"readme_md, expected_error",
[
(README_MULTIPLE_SAME_HEADING_1, EXPECTED_ERROR_README_MULTIPLE_SAME_HEADING_1),
],
)
def test_readme_from_string_parsing_errors(readme_md, expected_error):
with pytest.raises(ValueError, match=re.escape(expected_error.format(path="root"))):
ReadMe.from_string(readme_md, example_yaml_structure)
@pytest.mark.parametrize(
"readme_md,",
[
(README_MULTIPLE_SAME_HEADING_1),
],
)
def test_readme_from_string_suppress_parsing_errors(readme_md):
ReadMe.from_string(readme_md, example_yaml_structure, suppress_parsing_errors=True)
@pytest.mark.parametrize(
"readme_md, expected_dict",
[
(README_CORRECT, CORRECT_DICT),
(README_CORRECT_FOUR_LEVEL, CORRECT_DICT_FOUR_LEVEL),
],
)
def test_readme_from_readme_correct(readme_md, expected_dict):
with tempfile.TemporaryDirectory() as tmp_dir:
path = Path(tmp_dir) / "README.md"
with open(path, "w+") as readme_file:
readme_file.write(readme_md)
out = ReadMe.from_readme(path, example_yaml_structure).to_dict()
assert out["name"] == path
assert out["text"] == ""
assert out["is_empty_text"]
assert out["subsections"] == expected_dict["subsections"]
@pytest.mark.parametrize(
"readme_md, expected_error",
[
(README_NO_YAML, EXPECTED_ERROR_README_NO_YAML),
(README_EMPTY_YAML, EXPECTED_ERROR_README_EMPTY_YAML),
(README_INCORRECT_YAML, EXPECTED_ERROR_README_INCORRECT_YAML),
(README_EMPTY, EXPECTED_ERROR_README_EMPTY),
(README_NONE_SUBSECTION, EXPECTED_ERROR_README_NONE_SUBSECTION),
(README_MISSING_FIRST_LEVEL, EXPECTED_ERROR_README_MISSING_FIRST_LEVEL),
(README_MISSING_SUBSECTION, EXPECTED_ERROR_README_MISSING_SUBSECTION),
(README_MISSING_TEXT, EXPECTED_ERROR_README_MISSING_TEXT),
(README_WRONG_FIRST_LEVEL, EXPECTED_ERROR_README_WRONG_FIRST_LEVEL),
(README_MULTIPLE_WRONG_FIRST_LEVEL, EXPECTED_ERROR_README_MULTIPLE_WRONG_FIRST_LEVEL),
(README_MISSING_CONTENT, EXPECTED_ERROR_README_MISSING_CONTENT),
],
)
def test_readme_from_readme_error(readme_md, expected_error):
with tempfile.TemporaryDirectory() as tmp_dir:
path = Path(tmp_dir) / "README.md"
with open(path, "w+") as readme_file:
readme_file.write(readme_md)
expected_error = expected_error.format(path=path)
with pytest.raises(ValueError, match=re.escape(expected_error)):
readme = ReadMe.from_readme(path, example_yaml_structure)
readme.validate()
@pytest.mark.parametrize(
"readme_md, expected_error",
[
(README_MULTIPLE_SAME_HEADING_1, EXPECTED_ERROR_README_MULTIPLE_SAME_HEADING_1),
],
)
def test_readme_from_readme_parsing_errors(readme_md, expected_error):
with tempfile.TemporaryDirectory() as tmp_dir:
path = Path(tmp_dir) / "README.md"
with open(path, "w+") as readme_file:
readme_file.write(readme_md)
expected_error = expected_error.format(path=path)
with pytest.raises(ValueError, match=re.escape(expected_error)):
ReadMe.from_readme(path, example_yaml_structure)
@pytest.mark.parametrize(
"readme_md,",
[
(README_MULTIPLE_SAME_HEADING_1),
],
)
def test_readme_from_readme_suppress_parsing_errors(readme_md):
with tempfile.TemporaryDirectory() as tmp_dir:
path = Path(tmp_dir) / "README.md"
with open(path, "w+") as readme_file:
readme_file.write(readme_md)
ReadMe.from_readme(path, example_yaml_structure, suppress_parsing_errors=True)
| datasets/tests/test_readme_util.py/0 | {
"file_path": "datasets/tests/test_readme_util.py",
"repo_id": "datasets",
"token_count": 6733
} | 70 |
<jupyter_start><jupyter_text>Bonus Unit 1: Let's train Huggy the Dog 🐶 to fetch a stick In this notebook, we'll reinforce what we learned in the first Unit by **teaching Huggy the Dog to fetch the stick and then play with it directly in your browser**⬇️ Here is an example of what **you will achieve at the end of the unit.** ⬇️ (launch ▶ to see)<jupyter_code>%%html
<video controls autoplay><source src="https://huggingface.co/datasets/huggingface-deep-rl-course/course-images/resolve/main/en/notebooks/unit-bonus1/huggy.mp4" type="video/mp4"></video><jupyter_output><empty_output><jupyter_text>The environment 🎮- Huggy the Dog, an environment created by [Thomas Simonini](https://twitter.com/ThomasSimonini) based on [Puppo The Corgi](https://blog.unity.com/technology/puppo-the-corgi-cuteness-overload-with-the-unity-ml-agents-toolkit) The library used 📚- [MLAgents](https://github.com/Unity-Technologies/ml-agents) We're constantly trying to improve our tutorials, so **if you find some issues in this notebook**, please [open an issue on the Github Repo](https://github.com/huggingface/deep-rl-class/issues). Objectives of this notebook 🏆At the end of the notebook, you will:- Understand **the state space, action space and reward function used to train Huggy**.- **Train your own Huggy** to fetch the stick.- Be able to play **with your trained Huggy directly in your browser**. This notebook is from Deep Reinforcement Learning Course In this free course, you will:- 📖 Study Deep Reinforcement Learning in **theory and practice**.- 🧑💻 Learn to **use famous Deep RL libraries** such as Stable Baselines3, RL Baselines3 Zoo, CleanRL and Sample Factory 2.0.- 🤖 Train **agents in unique environments**And more check 📚 the syllabus 👉 https://simoninithomas.github.io/deep-rl-courseDon’t forget to **sign up to the course** (we are collecting your email to be able to **send you the links when each Unit is published and give you information about the challenges and updates).**The best way to keep in touch is to join our discord server to exchange with the community and with us 👉🏻 https://discord.gg/ydHrjt3WP5 Prerequisites 🏗️Before diving into the notebook, you need to:🔲 📚 **Develop an understanding of the foundations of Reinforcement learning** (MC, TD, Rewards hypothesis...) by doing Unit 1🔲 📚 **Read the introduction to Huggy** by doing Bonus Unit 1 Set the GPU 💪- To **accelerate the agent's training, we'll use a GPU**. To do that, go to `Runtime > Change Runtime type` - `Hardware Accelerator > GPU` Clone the repository and install the dependencies 🔽- We need to clone the repository, that contains **ML-Agents.**<jupyter_code>%%capture
# Clone the repository (can take 3min)
!git clone --depth 1 https://github.com/Unity-Technologies/ml-agents
%%capture
# Go inside the repository and install the package (can take 3min)
%cd ml-agents
!pip3 install -e ./ml-agents-envs
!pip3 install -e ./ml-agents<jupyter_output><empty_output><jupyter_text>Download and move the environment zip file in `./trained-envs-executables/linux/`- Our environment executable is in a zip file.- We need to download it and place it to `./trained-envs-executables/linux/`<jupyter_code>!mkdir ./trained-envs-executables
!mkdir ./trained-envs-executables/linux
!wget --load-cookies /tmp/cookies.txt "https://docs.google.com/uc?export=download&confirm=$(wget --quiet --save-cookies /tmp/cookies.txt --keep-session-cookies --no-check-certificate 'https://docs.google.com/uc?export=download&id=1zv3M95ZJTWHUVOWT6ckq_cm98nft8gdF' -O- | sed -rn 's/.*confirm=([0-9A-Za-z_]+).*/\1\n/p')&id=1zv3M95ZJTWHUVOWT6ckq_cm98nft8gdF" -O ./trained-envs-executables/linux/Huggy.zip && rm -rf /tmp/cookies.txt<jupyter_output><empty_output><jupyter_text>Download the file Huggy.zip from https://drive.google.com/uc?export=download&id=1zv3M95ZJTWHUVOWT6ckq_cm98nft8gdF using `wget`. Check out the full solution to download large files from GDrive [here](https://bcrf.biochem.wisc.edu/2021/02/05/download-google-drive-files-using-wget/)<jupyter_code>%%capture
!unzip -d ./trained-envs-executables/linux/ ./trained-envs-executables/linux/Huggy.zip<jupyter_output><empty_output><jupyter_text>Make sure your file is accessible<jupyter_code>!chmod -R 755 ./trained-envs-executables/linux/Huggy<jupyter_output><empty_output><jupyter_text>Let's recap how this environment works The State Space: what Huggy "perceives."Huggy doesn't "see" his environment. Instead, we provide him information about the environment:- The target (stick) position- The relative position between himself and the target- The orientation of his legs.Given all this information, Huggy **can decide which action to take next to fulfill his goal**. The Action Space: what moves Huggy can do**Joint motors drive huggy legs**. It means that to get the target, Huggy needs to **learn to rotate the joint motors of each of his legs correctly so he can move**. The Reward FunctionThe reward function is designed so that **Huggy will fulfill his goal** : fetch the stick.Remember that one of the foundations of Reinforcement Learning is the *reward hypothesis*: a goal can be described as the **maximization of the expected cumulative reward**.Here, our goal is that Huggy **goes towards the stick but without spinning too much**. Hence, our reward function must translate this goal.Our reward function:- *Orientation bonus*: we **reward him for getting close to the target**.- *Time penalty*: a fixed-time penalty given at every action to **force him to get to the stick as fast as possible**.- *Rotation penalty*: we penalize Huggy if **he spins too much and turns too quickly**.- *Getting to the target reward*: we reward Huggy for **reaching the target**. Create the Huggy config file- In ML-Agents, you define the **training hyperparameters into config.yaml files.**- For the scope of this notebook, we're not going to modify the hyperparameters, but if you want to try as an experiment, you should also try to modify some other hyperparameters, Unity provides very [good documentation explaining each of them here](https://github.com/Unity-Technologies/ml-agents/blob/main/docs/Training-Configuration-File.md).- But we need to create a config file for Huggy. - To do that click on Folder logo on the left of your screen. - Go to `/content/ml-agents/config/ppo` - Right mouse click and create a new file called `Huggy.yaml` - Copy and paste the content below 🔽<jupyter_code>behaviors:
Huggy:
trainer_type: ppo
hyperparameters:
batch_size: 2048
buffer_size: 20480
learning_rate: 0.0003
beta: 0.005
epsilon: 0.2
lambd: 0.95
num_epoch: 3
learning_rate_schedule: linear
network_settings:
normalize: true
hidden_units: 512
num_layers: 3
vis_encode_type: simple
reward_signals:
extrinsic:
gamma: 0.995
strength: 1.0
checkpoint_interval: 200000
keep_checkpoints: 15
max_steps: 2e6
time_horizon: 1000
summary_freq: 50000<jupyter_output><empty_output><jupyter_text>- Don't forget to save the file! - **In the case you want to modify the hyperparameters**, in Google Colab notebook, you can click here to open the config.yaml: `/content/ml-agents/config/ppo/Huggy.yaml`- For instance **if you want to save more models during the training** (for now, we save every 200,000 training timesteps). You need to modify: - `checkpoint_interval`: The number of training timesteps collected between each checkpoint. - `keep_checkpoints`: The maximum number of model checkpoints to keep.=> Just keep in mind that **decreasing the `checkpoint_interval` means more models to upload to the Hub and so a longer uploading time**We’re now ready to train our agent 🔥. Train our agentTo train our agent, we just need to **launch mlagents-learn and select the executable containing the environment.**With ML Agents, we run a training script. We define four parameters:1. `mlagents-learn `: the path where the hyperparameter config file is.2. `--env`: where the environment executable is.3. `--run-id`: the name you want to give to your training run id.4. `--no-graphics`: to not launch the visualization during the training.Train the model and use the `--resume` flag to continue training in case of interruption.> It will fail first time when you use `--resume`, try running the block again to bypass the error. The training will take 30 to 45min depending on your machine (don't forget to **set up a GPU**), go take a ☕️you deserve it 🤗.<jupyter_code>!mlagents-learn ./config/ppo/Huggy.yaml --env=./trained-envs-executables/linux/Huggy/Huggy --run-id="Huggy" --no-graphics<jupyter_output><empty_output><jupyter_text>Push the agent to the 🤗 Hub- Now that we trained our agent, we’re **ready to push it to the Hub to be able to play with Huggy on your browser🔥.** To be able to share your model with the community there are three more steps to follow:1️⃣ (If it's not already done) create an account to HF ➡ https://huggingface.co/join2️⃣ Sign in and then, you need to store your authentication token from the Hugging Face website.- Create a new token (https://huggingface.co/settings/tokens) **with write role**- Copy the token- Run the cell below and paste the token<jupyter_code>from huggingface_hub import notebook_login
notebook_login()<jupyter_output><empty_output><jupyter_text>If you don't want to use a Google Colab or a Jupyter Notebook, you need to use this command instead: `huggingface-cli login` Then, we simply need to run `mlagents-push-to-hf`. And we define 4 parameters:1. `--run-id`: the name of the training run id.2. `--local-dir`: where the agent was saved, it’s results/, so in my case results/First Training.3. `--repo-id`: the name of the Hugging Face repo you want to create or update. It’s always /If the repo does not exist **it will be created automatically**4. `--commit-message`: since HF repos are git repository you need to define a commit message.<jupyter_code>!mlagents-push-to-hf --run-id="HuggyTraining" --local-dir="./results/Huggy" --repo-id="ThomasSimonini/ppo-Huggy" --commit-message="Huggy"<jupyter_output><empty_output> | deep-rl-class/notebooks/bonus-unit1/bonus-unit1.ipynb/0 | {
"file_path": "deep-rl-class/notebooks/bonus-unit1/bonus-unit1.ipynb",
"repo_id": "deep-rl-class",
"token_count": 3113
} | 71 |
# Congratulations
<img src="https://huggingface.co/datasets/huggingface-deep-rl-course/course-images/resolve/main/en/communication/thumbnail.png" alt="Thumbnail"/>
**Congratulations on finishing this course!** With perseverance, hard work, and determination, **you've acquired a solid background in Deep Reinforcement Learning**.
But finishing this course is **not the end of your journey**. It's just the beginning: don't hesitate to explore bonus unit 3, where we show you topics you may be interested in studying. And don't hesitate to **share what you're doing, and ask questions in the discord server**
**Thank you** for being part of this course. **I hope you liked this course as much as I loved writing it**.
Don't hesitate **to give us feedback on how we can improve the course** using [this form](https://forms.gle/BzKXWzLAGZESGNaE9)
And don't forget **to check in the next section how you can get (if you pass) your certificate of completion 🎓.**
One last thing, to keep in touch with the Reinforcement Learning Team and with me:
- [Follow me on Twitter](https://twitter.com/thomassimonini)
- [Follow Hugging Face Twitter account](https://twitter.com/huggingface)
- [Join the Hugging Face Discord](https://www.hf.co/join/discord)
## Keep Learning, Stay Awesome 🤗
Thomas Simonini,
| deep-rl-class/units/en/communication/conclusion.mdx/0 | {
"file_path": "deep-rl-class/units/en/communication/conclusion.mdx",
"repo_id": "deep-rl-class",
"token_count": 364
} | 72 |
# Two main approaches for solving RL problems [[two-methods]]
<Tip>
Now that we learned the RL framework, how do we solve the RL problem?
</Tip>
In other words, how do we build an RL agent that can **select the actions that maximize its expected cumulative reward?**
## The Policy π: the agent’s brain [[policy]]
The Policy **π** is the **brain of our Agent**, it’s the function that tells us what **action to take given the state we are in.** So it **defines the agent’s behavior** at a given time.
<figure>
<img src="https://huggingface.co/datasets/huggingface-deep-rl-course/course-images/resolve/main/en/unit1/policy_1.jpg" alt="Policy" />
<figcaption>Think of policy as the brain of our agent, the function that will tell us the action to take given a state</figcaption>
</figure>
This Policy **is the function we want to learn**, our goal is to find the optimal policy π\*, the policy that **maximizes expected return** when the agent acts according to it. We find this π\* **through training.**
There are two approaches to train our agent to find this optimal policy π\*:
- **Directly,** by teaching the agent to learn which **action to take,** given the current state: **Policy-Based Methods.**
- Indirectly, **teach the agent to learn which state is more valuable** and then take the action that **leads to the more valuable states**: Value-Based Methods.
## Policy-Based Methods [[policy-based]]
In Policy-Based methods, **we learn a policy function directly.**
This function will define a mapping from each state to the best corresponding action. Alternatively, it could define **a probability distribution over the set of possible actions at that state.**
<figure>
<img src="https://huggingface.co/datasets/huggingface-deep-rl-course/course-images/resolve/main/en/unit1/policy_2.jpg" alt="Policy" />
<figcaption>As we can see here, the policy (deterministic) <b>directly indicates the action to take for each step.</b></figcaption>
</figure>
We have two types of policies:
- *Deterministic*: a policy at a given state **will always return the same action.**
<figure>
<img src="https://huggingface.co/datasets/huggingface-deep-rl-course/course-images/resolve/main/en/unit1/policy_3.jpg" alt="Policy"/>
<figcaption>action = policy(state)</figcaption>
</figure>
<img src="https://huggingface.co/datasets/huggingface-deep-rl-course/course-images/resolve/main/en/unit1/policy_4.jpg" alt="Policy" width="100%"/>
- *Stochastic*: outputs **a probability distribution over actions.**
<figure>
<img src="https://huggingface.co/datasets/huggingface-deep-rl-course/course-images/resolve/main/en/unit1/policy_5.jpg" alt="Policy"/>
<figcaption>policy(actions | state) = probability distribution over the set of actions given the current state</figcaption>
</figure>
<figure>
<img src="https://huggingface.co/datasets/huggingface-deep-rl-course/course-images/resolve/main/en/unit1/policy-based.png" alt="Policy Based"/>
<figcaption>Given an initial state, our stochastic policy will output probability distributions over the possible actions at that state.</figcaption>
</figure>
If we recap:
<img src="https://huggingface.co/datasets/huggingface-deep-rl-course/course-images/resolve/main/en/unit1/pbm_1.jpg" alt="Pbm recap" width="100%" />
<img src="https://huggingface.co/datasets/huggingface-deep-rl-course/course-images/resolve/main/en/unit1/pbm_2.jpg" alt="Pbm recap" width="100%" />
## Value-based methods [[value-based]]
In value-based methods, instead of learning a policy function, we **learn a value function** that maps a state to the expected value **of being at that state.**
The value of a state is the **expected discounted return** the agent can get if it **starts in that state, and then acts according to our policy.**
“Act according to our policy” just means that our policy is **“going to the state with the highest value”.**
<img src="https://huggingface.co/datasets/huggingface-deep-rl-course/course-images/resolve/main/en/unit1/value_1.jpg" alt="Value based RL" width="100%" />
Here we see that our value function **defined values for each possible state.**
<figure>
<img src="https://huggingface.co/datasets/huggingface-deep-rl-course/course-images/resolve/main/en/unit1/value_2.jpg" alt="Value based RL"/>
<figcaption>Thanks to our value function, at each step our policy will select the state with the biggest value defined by the value function: -7, then -6, then -5 (and so on) to attain the goal.</figcaption>
</figure>
Thanks to our value function, at each step our policy will select the state with the biggest value defined by the value function: -7, then -6, then -5 (and so on) to attain the goal.
If we recap:
<img src="https://huggingface.co/datasets/huggingface-deep-rl-course/course-images/resolve/main/en/unit1/vbm_1.jpg" alt="Vbm recap" width="100%" />
<img src="https://huggingface.co/datasets/huggingface-deep-rl-course/course-images/resolve/main/en/unit1/vbm_2.jpg" alt="Vbm recap" width="100%" />
| deep-rl-class/units/en/unit1/two-methods.mdx/0 | {
"file_path": "deep-rl-class/units/en/unit1/two-methods.mdx",
"repo_id": "deep-rl-class",
"token_count": 1565
} | 73 |
# What is RL? A short recap [[what-is-rl]]
In RL, we build an agent that can **make smart decisions**. For instance, an agent that **learns to play a video game.** Or a trading agent that **learns to maximize its benefits** by deciding on **what stocks to buy and when to sell.**
<img src="https://huggingface.co/datasets/huggingface-deep-rl-course/course-images/resolve/main/en/unit3/rl-process.jpg" alt="RL process"/>
To make intelligent decisions, our agent will learn from the environment by **interacting with it through trial and error** and receiving rewards (positive or negative) **as unique feedback.**
Its goal **is to maximize its expected cumulative reward** (because of the reward hypothesis).
**The agent's decision-making process is called the policy π:** given a state, a policy will output an action or a probability distribution over actions. That is, given an observation of the environment, a policy will provide an action (or multiple probabilities for each action) that the agent should take.
<img src="https://huggingface.co/datasets/huggingface-deep-rl-course/course-images/resolve/main/en/unit3/policy.jpg" alt="Policy"/>
**Our goal is to find an optimal policy π* **, aka., a policy that leads to the best expected cumulative reward.
And to find this optimal policy (hence solving the RL problem), there **are two main types of RL methods**:
- *Policy-based methods*: **Train the policy directly** to learn which action to take given a state.
- *Value-based methods*: **Train a value function** to learn **which state is more valuable** and use this value function **to take the action that leads to it.**
<img src="https://huggingface.co/datasets/huggingface-deep-rl-course/course-images/resolve/main/en/unit3/two-approaches.jpg" alt="Two RL approaches"/>
And in this unit, **we'll dive deeper into the value-based methods.**
| deep-rl-class/units/en/unit2/what-is-rl.mdx/0 | {
"file_path": "deep-rl-class/units/en/unit2/what-is-rl.mdx",
"repo_id": "deep-rl-class",
"token_count": 525
} | 74 |
# (Optional) the Policy Gradient Theorem
In this optional section where we're **going to study how we differentiate the objective function that we will use to approximate the policy gradient**.
Let's first recap our different formulas:
1. The Objective function
<img src="https://huggingface.co/datasets/huggingface-deep-rl-course/course-images/resolve/main/en/unit6/expected_reward.png" alt="Return"/>
2. The probability of a trajectory (given that action comes from \\(\pi_\theta\\)):
<img src="https://huggingface.co/datasets/huggingface-deep-rl-course/course-images/resolve/main/en/unit6/probability.png" alt="Probability"/>
So we have:
\\(\nabla_\theta J(\theta) = \nabla_\theta \sum_{\tau}P(\tau;\theta)R(\tau)\\)
We can rewrite the gradient of the sum as the sum of the gradient:
\\( = \sum_{\tau} \nabla_\theta P(\tau;\theta)R(\tau) \\)
We then multiply every term in the sum by \\(\frac{P(\tau;\theta)}{P(\tau;\theta)}\\)(which is possible since it's = 1)
\\( = \sum_{\tau} \frac{P(\tau;\theta)}{P(\tau;\theta)}\nabla_\theta P(\tau;\theta)R(\tau) \\)
We can simplify further this since \\( \frac{P(\tau;\theta)}{P(\tau;\theta)}\nabla_\theta P(\tau;\theta) = P(\tau;\theta)\frac{\nabla_\theta P(\tau;\theta)}{P(\tau;\theta)} \\)
\\(= \sum_{\tau} P(\tau;\theta) \frac{\nabla_\theta P(\tau;\theta)}{P(\tau;\theta)}R(\tau) \\)
We can then use the *derivative log trick* (also called *likelihood ratio trick* or *REINFORCE trick*), a simple rule in calculus that implies that \\( \nabla_x log f(x) = \frac{\nabla_x f(x)}{f(x)} \\)
So given we have \\(\frac{\nabla_\theta P(\tau;\theta)}{P(\tau;\theta)} \\) we transform it as \\(\nabla_\theta log P(\tau|\theta) \\)
So this is our likelihood policy gradient:
\\( \nabla_\theta J(\theta) = \sum_{\tau} P(\tau;\theta) \nabla_\theta log P(\tau;\theta) R(\tau) \\)
Thanks for this new formula, we can estimate the gradient using trajectory samples (we can approximate the likelihood ratio policy gradient with sample-based estimate if you prefer).
\\(\nabla_\theta J(\theta) = \frac{1}{m} \sum^{m}_{i=1} \nabla_\theta log P(\tau^{(i)};\theta)R(\tau^{(i)})\\) where each \\(\tau^{(i)}\\) is a sampled trajectory.
But we still have some mathematics work to do there: we need to simplify \\( \nabla_\theta log P(\tau|\theta) \\)
We know that:
\\(\nabla_\theta log P(\tau^{(i)};\theta)= \nabla_\theta log[ \mu(s_0) \prod_{t=0}^{H} P(s_{t+1}^{(i)}|s_{t}^{(i)}, a_{t}^{(i)}) \pi_\theta(a_{t}^{(i)}|s_{t}^{(i)})]\\)
Where \\(\mu(s_0)\\) is the initial state distribution and \\( P(s_{t+1}^{(i)}|s_{t}^{(i)}, a_{t}^{(i)}) \\) is the state transition dynamics of the MDP.
We know that the log of a product is equal to the sum of the logs:
\\(\nabla_\theta log P(\tau^{(i)};\theta)= \nabla_\theta \left[log \mu(s_0) + \sum\limits_{t=0}^{H}log P(s_{t+1}^{(i)}|s_{t}^{(i)} a_{t}^{(i)}) + \sum\limits_{t=0}^{H}log \pi_\theta(a_{t}^{(i)}|s_{t}^{(i)})\right] \\)
We also know that the gradient of the sum is equal to the sum of gradient:
\\( \nabla_\theta log P(\tau^{(i)};\theta)=\nabla_\theta log\mu(s_0) + \nabla_\theta \sum\limits_{t=0}^{H} log P(s_{t+1}^{(i)}|s_{t}^{(i)} a_{t}^{(i)}) + \nabla_\theta \sum\limits_{t=0}^{H} log \pi_\theta(a_{t}^{(i)}|s_{t}^{(i)}) \\)
Since neither initial state distribution or state transition dynamics of the MDP are dependent of \\(\theta\\), the derivate of both terms are 0. So we can remove them:
Since:
\\(\nabla_\theta \sum_{t=0}^{H} log P(s_{t+1}^{(i)}|s_{t}^{(i)} a_{t}^{(i)}) = 0 \\) and \\( \nabla_\theta \mu(s_0) = 0\\)
\\(\nabla_\theta log P(\tau^{(i)};\theta) = \nabla_\theta \sum_{t=0}^{H} log \pi_\theta(a_{t}^{(i)}|s_{t}^{(i)})\\)
We can rewrite the gradient of the sum as the sum of gradients:
\\( \nabla_\theta log P(\tau^{(i)};\theta)= \sum_{t=0}^{H} \nabla_\theta log \pi_\theta(a_{t}^{(i)}|s_{t}^{(i)}) \\)
So, the final formula for estimating the policy gradient is:
\\( \nabla_{\theta} J(\theta) = \hat{g} = \frac{1}{m} \sum^{m}_{i=1} \sum^{H}_{t=0} \nabla_\theta \log \pi_\theta(a^{(i)}_{t} | s_{t}^{(i)})R(\tau^{(i)}) \\)
| deep-rl-class/units/en/unit4/pg-theorem.mdx/0 | {
"file_path": "deep-rl-class/units/en/unit4/pg-theorem.mdx",
"repo_id": "deep-rl-class",
"token_count": 1814
} | 75 |
# Advantage Actor Critic (A2C) using Robotics Simulations with Panda-Gym 🤖 [[hands-on]]
<CourseFloatingBanner classNames="absolute z-10 right-0 top-0"
notebooks={[
{label: "Google Colab", value: "https://colab.research.google.com/github/huggingface/deep-rl-class/blob/main/notebooks/unit6/unit6.ipynb"}
]}
askForHelpUrl="http://hf.co/join/discord" />
Now that you've studied the theory behind Advantage Actor Critic (A2C), **you're ready to train your A2C agent** using Stable-Baselines3 in a robotic environment. And train a:
- A robotic arm 🦾 to move to the correct position.
We're going to use
- [panda-gym](https://github.com/qgallouedec/panda-gym)
To validate this hands-on for the certification process, you need to push your two trained models to the Hub and get the following results:
- `PandaReachDense-v3` get a result of >= -3.5.
To find your result, [go to the leaderboard](https://huggingface.co/spaces/huggingface-projects/Deep-Reinforcement-Learning-Leaderboard) and find your model, **the result = mean_reward - std of reward**
For more information about the certification process, check this section 👉 https://huggingface.co/deep-rl-course/en/unit0/introduction#certification-process
**To start the hands-on click on Open In Colab button** 👇 :
[](https://colab.research.google.com/github/huggingface/deep-rl-class/blob/master/notebooks/unit6/unit6.ipynb)
# Unit 6: Advantage Actor Critic (A2C) using Robotics Simulations with Panda-Gym 🤖
### 🎮 Environments:
- [Panda-Gym](https://github.com/qgallouedec/panda-gym)
### 📚 RL-Library:
- [Stable-Baselines3](https://stable-baselines3.readthedocs.io/)
We're constantly trying to improve our tutorials, so **if you find some issues in this notebook**, please [open an issue on the GitHub Repo](https://github.com/huggingface/deep-rl-class/issues).
## Objectives of this notebook 🏆
At the end of the notebook, you will:
- Be able to use **Panda-Gym**, the environment library.
- Be able to **train robots using A2C**.
- Understand why **we need to normalize the input**.
- Be able to **push your trained agent and the code to the Hub** with a nice video replay and an evaluation score 🔥.
## Prerequisites 🏗️
Before diving into the notebook, you need to:
🔲 📚 Study [Actor-Critic methods by reading Unit 6](https://huggingface.co/deep-rl-course/unit6/introduction) 🤗
# Let's train our first robots 🤖
## Set the GPU 💪
- To **accelerate the agent's training, we'll use a GPU**. To do that, go to `Runtime > Change Runtime type`
<img src="https://huggingface.co/datasets/huggingface-deep-rl-course/course-images/resolve/main/en/notebooks/gpu-step1.jpg" alt="GPU Step 1">
- `Hardware Accelerator > GPU`
<img src="https://huggingface.co/datasets/huggingface-deep-rl-course/course-images/resolve/main/en/notebooks/gpu-step2.jpg" alt="GPU Step 2">
## Create a virtual display 🔽
During the notebook, we'll need to generate a replay video. To do so, with colab, **we need to have a virtual screen to be able to render the environment** (and thus record the frames).
The following cell will install the librairies and create and run a virtual screen 🖥
```python
%%capture
!apt install python-opengl
!apt install ffmpeg
!apt install xvfb
!pip3 install pyvirtualdisplay
```
```python
# Virtual display
from pyvirtualdisplay import Display
virtual_display = Display(visible=0, size=(1400, 900))
virtual_display.start()
```
### Install dependencies 🔽
We’ll install multiple ones:
- `gymnasium`
- `panda-gym`: Contains the robotics arm environments.
- `stable-baselines3`: The SB3 deep reinforcement learning library.
- `huggingface_sb3`: Additional code for Stable-baselines3 to load and upload models from the Hugging Face 🤗 Hub.
- `huggingface_hub`: Library allowing anyone to work with the Hub repositories.
```bash
!pip install stable-baselines3[extra]
!pip install gymnasium
!pip install huggingface_sb3
!pip install huggingface_hub
!pip install panda_gym
```
## Import the packages 📦
```python
import os
import gymnasium as gym
import panda_gym
from huggingface_sb3 import load_from_hub, package_to_hub
from stable_baselines3 import A2C
from stable_baselines3.common.evaluation import evaluate_policy
from stable_baselines3.common.vec_env import DummyVecEnv, VecNormalize
from stable_baselines3.common.env_util import make_vec_env
from huggingface_hub import notebook_login
```
## PandaReachDense-v3 🦾
The agent we're going to train is a robotic arm that needs to do controls (moving the arm and using the end-effector).
In robotics, the *end-effector* is the device at the end of a robotic arm designed to interact with the environment.
In `PandaReach`, the robot must place its end-effector at a target position (green ball).
We're going to use the dense version of this environment. It means we'll get a *dense reward function* that **will provide a reward at each timestep** (the closer the agent is to completing the task, the higher the reward). Contrary to a *sparse reward function* where the environment **return a reward if and only if the task is completed**.
Also, we're going to use the *End-effector displacement control*, it means the **action corresponds to the displacement of the end-effector**. We don't control the individual motion of each joint (joint control).
<img src="https://huggingface.co/datasets/huggingface-deep-rl-course/course-images/resolve/main/en/unit8/robotics.jpg" alt="Robotics"/>
This way **the training will be easier**.
### Create the environment
#### The environment 🎮
In `PandaReachDense-v3` the robotic arm must place its end-effector at a target position (green ball).
```python
env_id = "PandaReachDense-v3"
# Create the env
env = gym.make(env_id)
# Get the state space and action space
s_size = env.observation_space.shape
a_size = env.action_space
```
```python
print("_____OBSERVATION SPACE_____ \n")
print("The State Space is: ", s_size)
print("Sample observation", env.observation_space.sample()) # Get a random observation
```
The observation space **is a dictionary with 3 different elements**:
- `achieved_goal`: (x,y,z) position of the goal.
- `desired_goal`: (x,y,z) distance between the goal position and the current object position.
- `observation`: position (x,y,z) and velocity of the end-effector (vx, vy, vz).
Given it's a dictionary as observation, **we will need to use a MultiInputPolicy policy instead of MlpPolicy**.
```python
print("\n _____ACTION SPACE_____ \n")
print("The Action Space is: ", a_size)
print("Action Space Sample", env.action_space.sample()) # Take a random action
```
The action space is a vector with 3 values:
- Control x, y, z movement
### Normalize observation and rewards
A good practice in reinforcement learning is to [normalize input features](https://stable-baselines3.readthedocs.io/en/master/guide/rl_tips.html).
For that purpose, there is a wrapper that will compute a running average and standard deviation of input features.
We also normalize rewards with this same wrapper by adding `norm_reward = True`
[You should check the documentation to fill this cell](https://stable-baselines3.readthedocs.io/en/master/guide/vec_envs.html#vecnormalize)
```python
env = make_vec_env(env_id, n_envs=4)
# Adding this wrapper to normalize the observation and the reward
env = # TODO: Add the wrapper
```
#### Solution
```python
env = make_vec_env(env_id, n_envs=4)
env = VecNormalize(env, norm_obs=True, norm_reward=True, clip_obs=10.)
```
### Create the A2C Model 🤖
For more information about A2C implementation with StableBaselines3 check: https://stable-baselines3.readthedocs.io/en/master/modules/a2c.html#notes
To find the best parameters I checked the [official trained agents by Stable-Baselines3 team](https://huggingface.co/sb3).
```python
model = # Create the A2C model and try to find the best parameters
```
#### Solution
```python
model = A2C(policy = "MultiInputPolicy",
env = env,
verbose=1)
```
### Train the A2C agent 🏃
- Let's train our agent for 1,000,000 timesteps, don't forget to use GPU on Colab. It will take approximately ~25-40min
```python
model.learn(1_000_000)
```
```python
# Save the model and VecNormalize statistics when saving the agent
model.save("a2c-PandaReachDense-v3")
env.save("vec_normalize.pkl")
```
### Evaluate the agent 📈
- Now that's our agent is trained, we need to **check its performance**.
- Stable-Baselines3 provides a method to do that: `evaluate_policy`
```python
from stable_baselines3.common.vec_env import DummyVecEnv, VecNormalize
# Load the saved statistics
eval_env = DummyVecEnv([lambda: gym.make("PandaReachDense-v3")])
eval_env = VecNormalize.load("vec_normalize.pkl", eval_env)
# We need to override the render_mode
eval_env.render_mode = "rgb_array"
# do not update them at test time
eval_env.training = False
# reward normalization is not needed at test time
eval_env.norm_reward = False
# Load the agent
model = A2C.load("a2c-PandaReachDense-v3")
mean_reward, std_reward = evaluate_policy(model, eval_env)
print(f"Mean reward = {mean_reward:.2f} +/- {std_reward:.2f}")
```
### Publish your trained model on the Hub 🔥
Now that we saw we got good results after the training, we can publish our trained model on the Hub with one line of code.
📚 The libraries documentation 👉 https://github.com/huggingface/huggingface_sb3/tree/main#hugging-face--x-stable-baselines3-v20
By using `package_to_hub`, as we already mentionned in the former units, **you evaluate, record a replay, generate a model card of your agent and push it to the hub**.
This way:
- You can **showcase our work** 🔥
- You can **visualize your agent playing** 👀
- You can **share with the community an agent that others can use** 💾
- You can **access a leaderboard 🏆 to see how well your agent is performing compared to your classmates** 👉 https://huggingface.co/spaces/huggingface-projects/Deep-Reinforcement-Learning-Leaderboard
To be able to share your model with the community there are three more steps to follow:
1️⃣ (If it's not already done) create an account to HF ➡ https://huggingface.co/join
2️⃣ Sign in and then, you need to store your authentication token from the Hugging Face website.
- Create a new token (https://huggingface.co/settings/tokens) **with write role**
<img src="https://huggingface.co/datasets/huggingface-deep-rl-course/course-images/resolve/main/en/notebooks/create-token.jpg" alt="Create HF Token">
- Copy the token
- Run the cell below and paste the token
```python
notebook_login()
!git config --global credential.helper store
```
If you don't want to use a Google Colab or a Jupyter Notebook, you need to use this command instead: `huggingface-cli login`
3️⃣ We're now ready to push our trained agent to the 🤗 Hub 🔥 using `package_to_hub()` function.
For this environment, **running this cell can take approximately 10min**
```python
from huggingface_sb3 import package_to_hub
package_to_hub(
model=model,
model_name=f"a2c-{env_id}",
model_architecture="A2C",
env_id=env_id,
eval_env=eval_env,
repo_id=f"ThomasSimonini/a2c-{env_id}", # Change the username
commit_message="Initial commit",
)
```
## Some additional challenges 🏆
The best way to learn **is to try things by your own**! Why not trying `PandaPickAndPlace-v3`?
If you want to try more advanced tasks for panda-gym, you need to check what was done using **TQC or SAC** (a more sample-efficient algorithm suited for robotics tasks). In real robotics, you'll use a more sample-efficient algorithm for a simple reason: contrary to a simulation **if you move your robotic arm too much, you have a risk of breaking it**.
PandaPickAndPlace-v1 (this model uses the v1 version of the environment): https://huggingface.co/sb3/tqc-PandaPickAndPlace-v1
And don't hesitate to check panda-gym documentation here: https://panda-gym.readthedocs.io/en/latest/usage/train_with_sb3.html
We provide you the steps to train another agent (optional):
1. Define the environment called "PandaPickAndPlace-v3"
2. Make a vectorized environment
3. Add a wrapper to normalize the observations and rewards. [Check the documentation](https://stable-baselines3.readthedocs.io/en/master/guide/vec_envs.html#vecnormalize)
4. Create the A2C Model (don't forget verbose=1 to print the training logs).
5. Train it for 1M Timesteps
6. Save the model and VecNormalize statistics when saving the agent
7. Evaluate your agent
8. Publish your trained model on the Hub 🔥 with `package_to_hub`
### Solution (optional)
```python
# 1 - 2
env_id = "PandaPickAndPlace-v3"
env = make_vec_env(env_id, n_envs=4)
# 3
env = VecNormalize(env, norm_obs=True, norm_reward=True, clip_obs=10.)
# 4
model = A2C(policy = "MultiInputPolicy",
env = env,
verbose=1)
# 5
model.learn(1_000_000)
```
```python
# 6
model_name = "a2c-PandaPickAndPlace-v3";
model.save(model_name)
env.save("vec_normalize.pkl")
# 7
from stable_baselines3.common.vec_env import DummyVecEnv, VecNormalize
# Load the saved statistics
eval_env = DummyVecEnv([lambda: gym.make("PandaPickAndPlace-v3")])
eval_env = VecNormalize.load("vec_normalize.pkl", eval_env)
# do not update them at test time
eval_env.training = False
# reward normalization is not needed at test time
eval_env.norm_reward = False
# Load the agent
model = A2C.load(model_name)
mean_reward, std_reward = evaluate_policy(model, eval_env)
print(f"Mean reward = {mean_reward:.2f} +/- {std_reward:.2f}")
# 8
package_to_hub(
model=model,
model_name=f"a2c-{env_id}",
model_architecture="A2C",
env_id=env_id,
eval_env=eval_env,
repo_id=f"ThomasSimonini/a2c-{env_id}", # TODO: Change the username
commit_message="Initial commit",
)
```
See you on Unit 7! 🔥
## Keep learning, stay awesome 🤗
| deep-rl-class/units/en/unit6/hands-on.mdx/0 | {
"file_path": "deep-rl-class/units/en/unit6/hands-on.mdx",
"repo_id": "deep-rl-class",
"token_count": 4616
} | 76 |
# Interesting Environments to try
Here we provide a list of interesting environments you can try to train your agents on:
## MineRL
<img src="https://huggingface.co/datasets/huggingface-deep-rl-course/course-images/resolve/main/en/unit12/minerl.jpg" alt="MineRL"/>
MineRL is a Python library that provides a Gym interface for interacting with the video game Minecraft, accompanied by datasets of human gameplay.
Every year there are challenges with this library. Check the [website](https://minerl.io/)
To start using this environment, check these resources:
- [What is MineRL?](https://www.youtube.com/watch?v=z6PTrGifupU)
- [First steps in MineRL](https://www.youtube.com/watch?v=8yIrWcyWGek)
- [MineRL documentation and tutorials](https://minerl.readthedocs.io/en/latest/)
## DonkeyCar Simulator
<img src="https://huggingface.co/datasets/huggingface-deep-rl-course/course-images/resolve/main/en/unit12/donkeycar.jpg" alt="Donkey Car"/>
Donkey is a Self Driving Car Platform for hobby remote control cars.
This simulator version is built on the Unity game platform. It uses their internal physics and graphics and connects to a donkey Python process to use our trained model to control the simulated Donkey (car).
To start using this environment, check these resources:
- [DonkeyCar Simulator documentation](https://docs.donkeycar.com/guide/deep_learning/simulator/)
- [Learn to Drive Smoothly (Antonin Raffin's tutorial) Part 1](https://www.youtube.com/watch?v=ngK33h00iBE)
- [Learn to Drive Smoothly (Antonin Raffin's tutorial) Part 2](https://www.youtube.com/watch?v=DUqssFvcSOY)
- [Learn to Drive Smoothly (Antonin Raffin's tutorial) Part 3](https://www.youtube.com/watch?v=v8j2bpcE4Rg)
- Pretrained agents:
- https://huggingface.co/araffin/tqc-donkey-mountain-track-v0
- https://huggingface.co/araffin/tqc-donkey-avc-sparkfun-v0
- https://huggingface.co/araffin/tqc-donkey-minimonaco-track-v0
## Starcraft II
<img src="https://huggingface.co/datasets/huggingface-deep-rl-course/course-images/resolve/main/en/unit12/alphastar.jpg" alt="Alphastar"/>
Starcraft II is a famous *real-time strategy game*. DeepMind has used this game for their Deep Reinforcement Learning research with [Alphastar](https://www.deepmind.com/blog/alphastar-mastering-the-real-time-strategy-game-starcraft-ii)
To start using this environment, check these resources:
- [Starcraft gym](http://starcraftgym.com/)
- [A. I. Learns to Play Starcraft 2 (Reinforcement Learning) tutorial](https://www.youtube.com/watch?v=q59wap1ELQ4)
## Author
This section was written by <a href="https://twitter.com/ThomasSimonini"> Thomas Simonini</a>
| deep-rl-class/units/en/unitbonus3/envs-to-try.mdx/0 | {
"file_path": "deep-rl-class/units/en/unitbonus3/envs-to-try.mdx",
"repo_id": "deep-rl-class",
"token_count": 851
} | 77 |
import glob
import subprocess
import sys
from typing import List
sys.path.append(".")
from benchmark_text_to_image import ALL_T2I_CKPTS # noqa: E402
PATTERN = "benchmark_*.py"
class SubprocessCallException(Exception):
pass
# Taken from `test_examples_utils.py`
def run_command(command: List[str], return_stdout=False):
"""
Runs `command` with `subprocess.check_output` and will potentially return the `stdout`. Will also properly capture
if an error occurred while running `command`
"""
try:
output = subprocess.check_output(command, stderr=subprocess.STDOUT)
if return_stdout:
if hasattr(output, "decode"):
output = output.decode("utf-8")
return output
except subprocess.CalledProcessError as e:
raise SubprocessCallException(
f"Command `{' '.join(command)}` failed with the following error:\n\n{e.output.decode()}"
) from e
def main():
python_files = glob.glob(PATTERN)
for file in python_files:
print(f"****** Running file: {file} ******")
# Run with canonical settings.
if file != "benchmark_text_to_image.py":
command = f"python {file}"
run_command(command.split())
command += " --run_compile"
run_command(command.split())
# Run variants.
for file in python_files:
if file == "benchmark_text_to_image.py":
for ckpt in ALL_T2I_CKPTS:
command = f"python {file} --ckpt {ckpt}"
if "turbo" in ckpt:
command += " --num_inference_steps 1"
run_command(command.split())
command += " --run_compile"
run_command(command.split())
elif file == "benchmark_sd_img.py":
for ckpt in ["stabilityai/stable-diffusion-xl-refiner-1.0", "stabilityai/sdxl-turbo"]:
command = f"python {file} --ckpt {ckpt}"
if ckpt == "stabilityai/sdxl-turbo":
command += " --num_inference_steps 2"
run_command(command.split())
command += " --run_compile"
run_command(command.split())
elif file == "benchmark_sd_inpainting.py":
sdxl_ckpt = "stabilityai/stable-diffusion-xl-base-1.0"
command = f"python {file} --ckpt {sdxl_ckpt}"
run_command(command.split())
command += " --run_compile"
run_command(command.split())
elif file in ["benchmark_controlnet.py", "benchmark_t2i_adapter.py"]:
sdxl_ckpt = (
"diffusers/controlnet-canny-sdxl-1.0"
if "controlnet" in file
else "TencentARC/t2i-adapter-canny-sdxl-1.0"
)
command = f"python {file} --ckpt {sdxl_ckpt}"
run_command(command.split())
command += " --run_compile"
run_command(command.split())
if __name__ == "__main__":
main()
| diffusers/benchmarks/run_all.py/0 | {
"file_path": "diffusers/benchmarks/run_all.py",
"repo_id": "diffusers",
"token_count": 1436
} | 78 |
<!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# Latent Consistency Model Multistep Scheduler
## Overview
Multistep and onestep scheduler (Algorithm 3) introduced alongside latent consistency models in the paper [Latent Consistency Models: Synthesizing High-Resolution Images with Few-Step Inference](https://arxiv.org/abs/2310.04378) by Simian Luo, Yiqin Tan, Longbo Huang, Jian Li, and Hang Zhao.
This scheduler should be able to generate good samples from [`LatentConsistencyModelPipeline`] in 1-8 steps.
## LCMScheduler
[[autodoc]] LCMScheduler
| diffusers/docs/source/en/api/schedulers/lcm.md/0 | {
"file_path": "diffusers/docs/source/en/api/schedulers/lcm.md",
"repo_id": "diffusers",
"token_count": 292
} | 79 |
<!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# Evaluating Diffusion Models
<a target="_blank" href="https://colab.research.google.com/github/huggingface/notebooks/blob/main/diffusers/evaluation.ipynb">
<img src="https://colab.research.google.com/assets/colab-badge.svg" alt="Open In Colab"/>
</a>
Evaluation of generative models like [Stable Diffusion](https://huggingface.co/docs/diffusers/stable_diffusion) is subjective in nature. But as practitioners and researchers, we often have to make careful choices amongst many different possibilities. So, when working with different generative models (like GANs, Diffusion, etc.), how do we choose one over the other?
Qualitative evaluation of such models can be error-prone and might incorrectly influence a decision.
However, quantitative metrics don't necessarily correspond to image quality. So, usually, a combination
of both qualitative and quantitative evaluations provides a stronger signal when choosing one model
over the other.
In this document, we provide a non-exhaustive overview of qualitative and quantitative methods to evaluate Diffusion models. For quantitative methods, we specifically focus on how to implement them alongside `diffusers`.
The methods shown in this document can also be used to evaluate different [noise schedulers](https://huggingface.co/docs/diffusers/main/en/api/schedulers/overview) keeping the underlying generation model fixed.
## Scenarios
We cover Diffusion models with the following pipelines:
- Text-guided image generation (such as the [`StableDiffusionPipeline`](https://huggingface.co/docs/diffusers/main/en/api/pipelines/stable_diffusion/text2img)).
- Text-guided image generation, additionally conditioned on an input image (such as the [`StableDiffusionImg2ImgPipeline`](https://huggingface.co/docs/diffusers/main/en/api/pipelines/stable_diffusion/img2img) and [`StableDiffusionInstructPix2PixPipeline`](https://huggingface.co/docs/diffusers/main/en/api/pipelines/pix2pix)).
- Class-conditioned image generation models (such as the [`DiTPipeline`](https://huggingface.co/docs/diffusers/main/en/api/pipelines/dit)).
## Qualitative Evaluation
Qualitative evaluation typically involves human assessment of generated images. Quality is measured across aspects such as compositionality, image-text alignment, and spatial relations. Common prompts provide a degree of uniformity for subjective metrics.
DrawBench and PartiPrompts are prompt datasets used for qualitative benchmarking. DrawBench and PartiPrompts were introduced by [Imagen](https://imagen.research.google/) and [Parti](https://parti.research.google/) respectively.
From the [official Parti website](https://parti.research.google/):
> PartiPrompts (P2) is a rich set of over 1600 prompts in English that we release as part of this work. P2 can be used to measure model capabilities across various categories and challenge aspects.
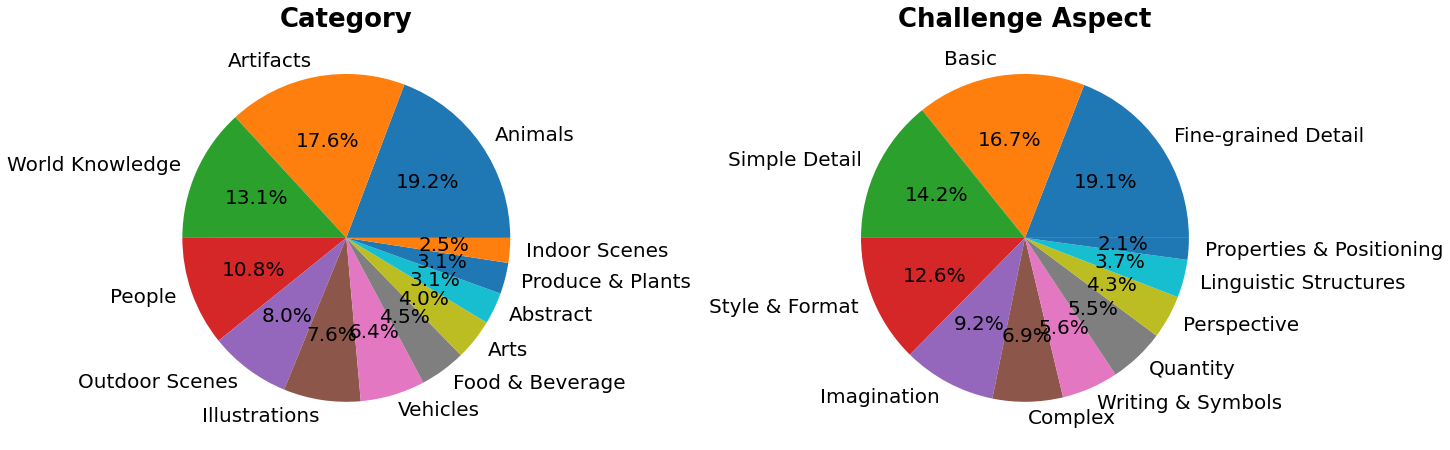
PartiPrompts has the following columns:
- Prompt
- Category of the prompt (such as “Abstract”, “World Knowledge”, etc.)
- Challenge reflecting the difficulty (such as “Basic”, “Complex”, “Writing & Symbols”, etc.)
These benchmarks allow for side-by-side human evaluation of different image generation models.
For this, the 🧨 Diffusers team has built **Open Parti Prompts**, which is a community-driven qualitative benchmark based on Parti Prompts to compare state-of-the-art open-source diffusion models:
- [Open Parti Prompts Game](https://huggingface.co/spaces/OpenGenAI/open-parti-prompts): For 10 parti prompts, 4 generated images are shown and the user selects the image that suits the prompt best.
- [Open Parti Prompts Leaderboard](https://huggingface.co/spaces/OpenGenAI/parti-prompts-leaderboard): The leaderboard comparing the currently best open-sourced diffusion models to each other.
To manually compare images, let’s see how we can use `diffusers` on a couple of PartiPrompts.
Below we show some prompts sampled across different challenges: Basic, Complex, Linguistic Structures, Imagination, and Writing & Symbols. Here we are using PartiPrompts as a [dataset](https://huggingface.co/datasets/nateraw/parti-prompts).
```python
from datasets import load_dataset
# prompts = load_dataset("nateraw/parti-prompts", split="train")
# prompts = prompts.shuffle()
# sample_prompts = [prompts[i]["Prompt"] for i in range(5)]
# Fixing these sample prompts in the interest of reproducibility.
sample_prompts = [
"a corgi",
"a hot air balloon with a yin-yang symbol, with the moon visible in the daytime sky",
"a car with no windows",
"a cube made of porcupine",
'The saying "BE EXCELLENT TO EACH OTHER" written on a red brick wall with a graffiti image of a green alien wearing a tuxedo. A yellow fire hydrant is on a sidewalk in the foreground.',
]
```
Now we can use these prompts to generate some images using Stable Diffusion ([v1-4 checkpoint](https://huggingface.co/CompVis/stable-diffusion-v1-4)):
```python
import torch
seed = 0
generator = torch.manual_seed(seed)
images = sd_pipeline(sample_prompts, num_images_per_prompt=1, generator=generator).images
```

We can also set `num_images_per_prompt` accordingly to compare different images for the same prompt. Running the same pipeline but with a different checkpoint ([v1-5](https://huggingface.co/runwayml/stable-diffusion-v1-5)), yields:

Once several images are generated from all the prompts using multiple models (under evaluation), these results are presented to human evaluators for scoring. For
more details on the DrawBench and PartiPrompts benchmarks, refer to their respective papers.
<Tip>
It is useful to look at some inference samples while a model is training to measure the
training progress. In our [training scripts](https://github.com/huggingface/diffusers/tree/main/examples/), we support this utility with additional support for
logging to TensorBoard and Weights & Biases.
</Tip>
## Quantitative Evaluation
In this section, we will walk you through how to evaluate three different diffusion pipelines using:
- CLIP score
- CLIP directional similarity
- FID
### Text-guided image generation
[CLIP score](https://arxiv.org/abs/2104.08718) measures the compatibility of image-caption pairs. Higher CLIP scores imply higher compatibility 🔼. The CLIP score is a quantitative measurement of the qualitative concept "compatibility". Image-caption pair compatibility can also be thought of as the semantic similarity between the image and the caption. CLIP score was found to have high correlation with human judgement.
Let's first load a [`StableDiffusionPipeline`]:
```python
from diffusers import StableDiffusionPipeline
import torch
model_ckpt = "CompVis/stable-diffusion-v1-4"
sd_pipeline = StableDiffusionPipeline.from_pretrained(model_ckpt, torch_dtype=torch.float16).to("cuda")
```
Generate some images with multiple prompts:
```python
prompts = [
"a photo of an astronaut riding a horse on mars",
"A high tech solarpunk utopia in the Amazon rainforest",
"A pikachu fine dining with a view to the Eiffel Tower",
"A mecha robot in a favela in expressionist style",
"an insect robot preparing a delicious meal",
"A small cabin on top of a snowy mountain in the style of Disney, artstation",
]
images = sd_pipeline(prompts, num_images_per_prompt=1, output_type="np").images
print(images.shape)
# (6, 512, 512, 3)
```
And then, we calculate the CLIP score.
```python
from torchmetrics.functional.multimodal import clip_score
from functools import partial
clip_score_fn = partial(clip_score, model_name_or_path="openai/clip-vit-base-patch16")
def calculate_clip_score(images, prompts):
images_int = (images * 255).astype("uint8")
clip_score = clip_score_fn(torch.from_numpy(images_int).permute(0, 3, 1, 2), prompts).detach()
return round(float(clip_score), 4)
sd_clip_score = calculate_clip_score(images, prompts)
print(f"CLIP score: {sd_clip_score}")
# CLIP score: 35.7038
```
In the above example, we generated one image per prompt. If we generated multiple images per prompt, we would have to take the average score from the generated images per prompt.
Now, if we wanted to compare two checkpoints compatible with the [`StableDiffusionPipeline`] we should pass a generator while calling the pipeline. First, we generate images with a
fixed seed with the [v1-4 Stable Diffusion checkpoint](https://huggingface.co/CompVis/stable-diffusion-v1-4):
```python
seed = 0
generator = torch.manual_seed(seed)
images = sd_pipeline(prompts, num_images_per_prompt=1, generator=generator, output_type="np").images
```
Then we load the [v1-5 checkpoint](https://huggingface.co/runwayml/stable-diffusion-v1-5) to generate images:
```python
model_ckpt_1_5 = "runwayml/stable-diffusion-v1-5"
sd_pipeline_1_5 = StableDiffusionPipeline.from_pretrained(model_ckpt_1_5, torch_dtype=weight_dtype).to(device)
images_1_5 = sd_pipeline_1_5(prompts, num_images_per_prompt=1, generator=generator, output_type="np").images
```
And finally, we compare their CLIP scores:
```python
sd_clip_score_1_4 = calculate_clip_score(images, prompts)
print(f"CLIP Score with v-1-4: {sd_clip_score_1_4}")
# CLIP Score with v-1-4: 34.9102
sd_clip_score_1_5 = calculate_clip_score(images_1_5, prompts)
print(f"CLIP Score with v-1-5: {sd_clip_score_1_5}")
# CLIP Score with v-1-5: 36.2137
```
It seems like the [v1-5](https://huggingface.co/runwayml/stable-diffusion-v1-5) checkpoint performs better than its predecessor. Note, however, that the number of prompts we used to compute the CLIP scores is quite low. For a more practical evaluation, this number should be way higher, and the prompts should be diverse.
<Tip warning={true}>
By construction, there are some limitations in this score. The captions in the training dataset
were crawled from the web and extracted from `alt` and similar tags associated an image on the internet.
They are not necessarily representative of what a human being would use to describe an image. Hence we
had to "engineer" some prompts here.
</Tip>
### Image-conditioned text-to-image generation
In this case, we condition the generation pipeline with an input image as well as a text prompt. Let's take the [`StableDiffusionInstructPix2PixPipeline`], as an example. It takes an edit instruction as an input prompt and an input image to be edited.
Here is one example:
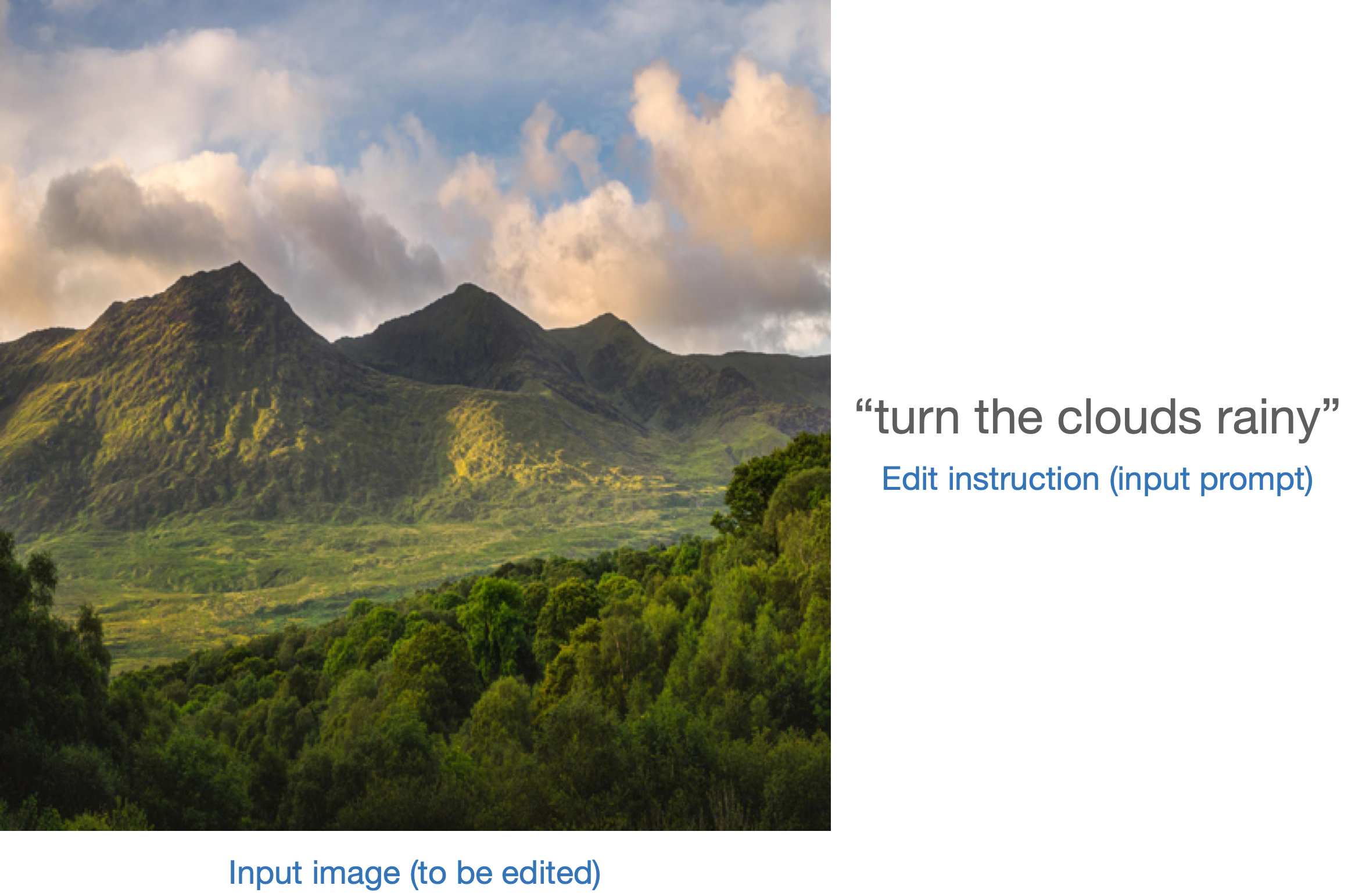
One strategy to evaluate such a model is to measure the consistency of the change between the two images (in [CLIP](https://huggingface.co/docs/transformers/model_doc/clip) space) with the change between the two image captions (as shown in [CLIP-Guided Domain Adaptation of Image Generators](https://arxiv.org/abs/2108.00946)). This is referred to as the "**CLIP directional similarity**".
- Caption 1 corresponds to the input image (image 1) that is to be edited.
- Caption 2 corresponds to the edited image (image 2). It should reflect the edit instruction.
Following is a pictorial overview:
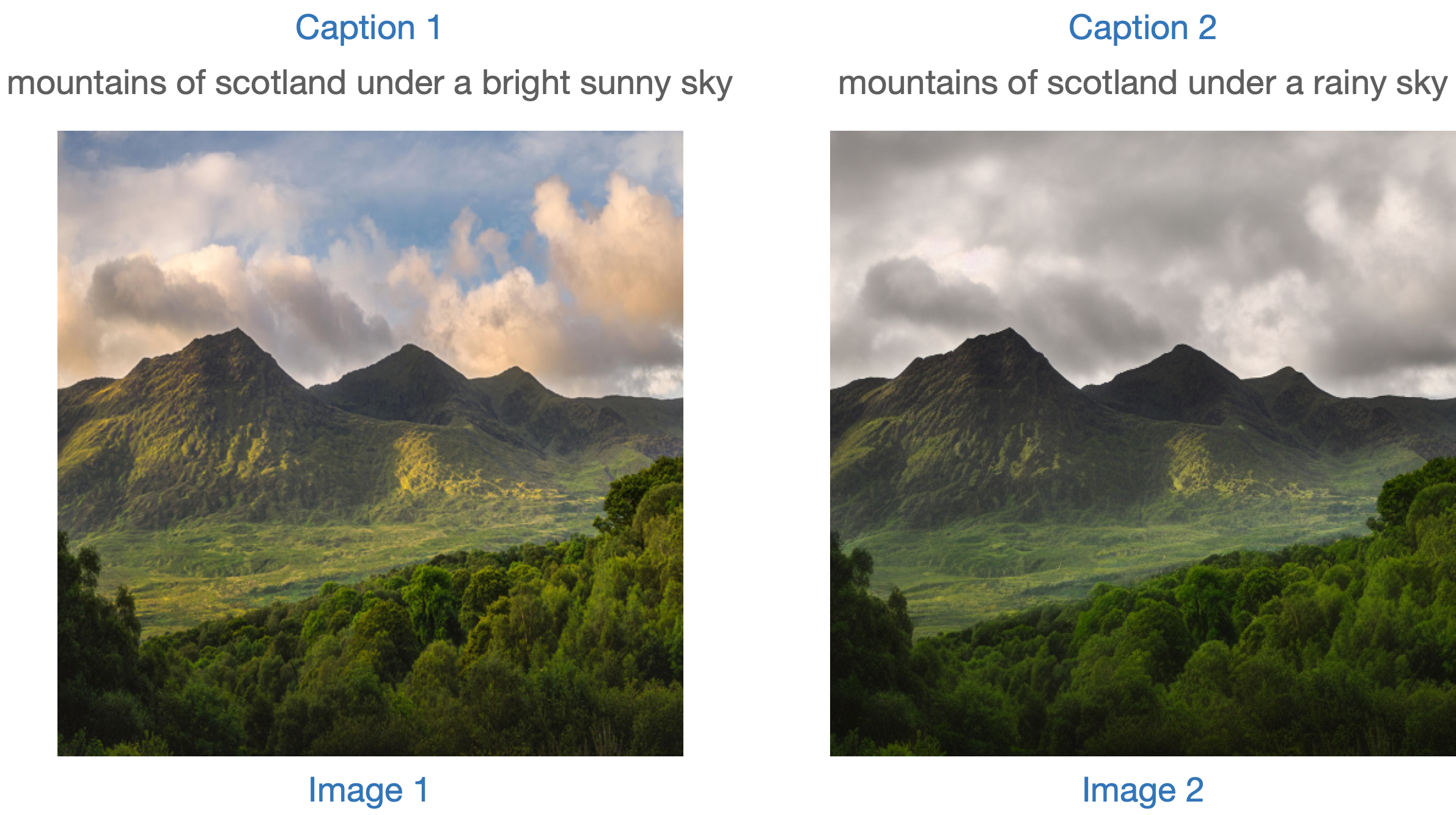
We have prepared a mini dataset to implement this metric. Let's first load the dataset.
```python
from datasets import load_dataset
dataset = load_dataset("sayakpaul/instructpix2pix-demo", split="train")
dataset.features
```
```bash
{'input': Value(dtype='string', id=None),
'edit': Value(dtype='string', id=None),
'output': Value(dtype='string', id=None),
'image': Image(decode=True, id=None)}
```
Here we have:
- `input` is a caption corresponding to the `image`.
- `edit` denotes the edit instruction.
- `output` denotes the modified caption reflecting the `edit` instruction.
Let's take a look at a sample.
```python
idx = 0
print(f"Original caption: {dataset[idx]['input']}")
print(f"Edit instruction: {dataset[idx]['edit']}")
print(f"Modified caption: {dataset[idx]['output']}")
```
```bash
Original caption: 2. FAROE ISLANDS: An archipelago of 18 mountainous isles in the North Atlantic Ocean between Norway and Iceland, the Faroe Islands has 'everything you could hope for', according to Big 7 Travel. It boasts 'crystal clear waterfalls, rocky cliffs that seem to jut out of nowhere and velvety green hills'
Edit instruction: make the isles all white marble
Modified caption: 2. WHITE MARBLE ISLANDS: An archipelago of 18 mountainous white marble isles in the North Atlantic Ocean between Norway and Iceland, the White Marble Islands has 'everything you could hope for', according to Big 7 Travel. It boasts 'crystal clear waterfalls, rocky cliffs that seem to jut out of nowhere and velvety green hills'
```
And here is the image:
```python
dataset[idx]["image"]
```

We will first edit the images of our dataset with the edit instruction and compute the directional similarity.
Let's first load the [`StableDiffusionInstructPix2PixPipeline`]:
```python
from diffusers import StableDiffusionInstructPix2PixPipeline
instruct_pix2pix_pipeline = StableDiffusionInstructPix2PixPipeline.from_pretrained(
"timbrooks/instruct-pix2pix", torch_dtype=torch.float16
).to(device)
```
Now, we perform the edits:
```python
import numpy as np
def edit_image(input_image, instruction):
image = instruct_pix2pix_pipeline(
instruction,
image=input_image,
output_type="np",
generator=generator,
).images[0]
return image
input_images = []
original_captions = []
modified_captions = []
edited_images = []
for idx in range(len(dataset)):
input_image = dataset[idx]["image"]
edit_instruction = dataset[idx]["edit"]
edited_image = edit_image(input_image, edit_instruction)
input_images.append(np.array(input_image))
original_captions.append(dataset[idx]["input"])
modified_captions.append(dataset[idx]["output"])
edited_images.append(edited_image)
```
To measure the directional similarity, we first load CLIP's image and text encoders:
```python
from transformers import (
CLIPTokenizer,
CLIPTextModelWithProjection,
CLIPVisionModelWithProjection,
CLIPImageProcessor,
)
clip_id = "openai/clip-vit-large-patch14"
tokenizer = CLIPTokenizer.from_pretrained(clip_id)
text_encoder = CLIPTextModelWithProjection.from_pretrained(clip_id).to(device)
image_processor = CLIPImageProcessor.from_pretrained(clip_id)
image_encoder = CLIPVisionModelWithProjection.from_pretrained(clip_id).to(device)
```
Notice that we are using a particular CLIP checkpoint, i.e., `openai/clip-vit-large-patch14`. This is because the Stable Diffusion pre-training was performed with this CLIP variant. For more details, refer to the [documentation](https://huggingface.co/docs/transformers/model_doc/clip).
Next, we prepare a PyTorch `nn.Module` to compute directional similarity:
```python
import torch.nn as nn
import torch.nn.functional as F
class DirectionalSimilarity(nn.Module):
def __init__(self, tokenizer, text_encoder, image_processor, image_encoder):
super().__init__()
self.tokenizer = tokenizer
self.text_encoder = text_encoder
self.image_processor = image_processor
self.image_encoder = image_encoder
def preprocess_image(self, image):
image = self.image_processor(image, return_tensors="pt")["pixel_values"]
return {"pixel_values": image.to(device)}
def tokenize_text(self, text):
inputs = self.tokenizer(
text,
max_length=self.tokenizer.model_max_length,
padding="max_length",
truncation=True,
return_tensors="pt",
)
return {"input_ids": inputs.input_ids.to(device)}
def encode_image(self, image):
preprocessed_image = self.preprocess_image(image)
image_features = self.image_encoder(**preprocessed_image).image_embeds
image_features = image_features / image_features.norm(dim=1, keepdim=True)
return image_features
def encode_text(self, text):
tokenized_text = self.tokenize_text(text)
text_features = self.text_encoder(**tokenized_text).text_embeds
text_features = text_features / text_features.norm(dim=1, keepdim=True)
return text_features
def compute_directional_similarity(self, img_feat_one, img_feat_two, text_feat_one, text_feat_two):
sim_direction = F.cosine_similarity(img_feat_two - img_feat_one, text_feat_two - text_feat_one)
return sim_direction
def forward(self, image_one, image_two, caption_one, caption_two):
img_feat_one = self.encode_image(image_one)
img_feat_two = self.encode_image(image_two)
text_feat_one = self.encode_text(caption_one)
text_feat_two = self.encode_text(caption_two)
directional_similarity = self.compute_directional_similarity(
img_feat_one, img_feat_two, text_feat_one, text_feat_two
)
return directional_similarity
```
Let's put `DirectionalSimilarity` to use now.
```python
dir_similarity = DirectionalSimilarity(tokenizer, text_encoder, image_processor, image_encoder)
scores = []
for i in range(len(input_images)):
original_image = input_images[i]
original_caption = original_captions[i]
edited_image = edited_images[i]
modified_caption = modified_captions[i]
similarity_score = dir_similarity(original_image, edited_image, original_caption, modified_caption)
scores.append(float(similarity_score.detach().cpu()))
print(f"CLIP directional similarity: {np.mean(scores)}")
# CLIP directional similarity: 0.0797976553440094
```
Like the CLIP Score, the higher the CLIP directional similarity, the better it is.
It should be noted that the `StableDiffusionInstructPix2PixPipeline` exposes two arguments, namely, `image_guidance_scale` and `guidance_scale` that let you control the quality of the final edited image. We encourage you to experiment with these two arguments and see the impact of that on the directional similarity.
We can extend the idea of this metric to measure how similar the original image and edited version are. To do that, we can just do `F.cosine_similarity(img_feat_two, img_feat_one)`. For these kinds of edits, we would still want the primary semantics of the images to be preserved as much as possible, i.e., a high similarity score.
We can use these metrics for similar pipelines such as the [`StableDiffusionPix2PixZeroPipeline`](https://huggingface.co/docs/diffusers/main/en/api/pipelines/pix2pix_zero#diffusers.StableDiffusionPix2PixZeroPipeline).
<Tip>
Both CLIP score and CLIP direction similarity rely on the CLIP model, which can make the evaluations biased.
</Tip>
***Extending metrics like IS, FID (discussed later), or KID can be difficult*** when the model under evaluation was pre-trained on a large image-captioning dataset (such as the [LAION-5B dataset](https://laion.ai/blog/laion-5b/)). This is because underlying these metrics is an InceptionNet (pre-trained on the ImageNet-1k dataset) used for extracting intermediate image features. The pre-training dataset of Stable Diffusion may have limited overlap with the pre-training dataset of InceptionNet, so it is not a good candidate here for feature extraction.
***Using the above metrics helps evaluate models that are class-conditioned. For example, [DiT](https://huggingface.co/docs/diffusers/main/en/api/pipelines/dit). It was pre-trained being conditioned on the ImageNet-1k classes.***
### Class-conditioned image generation
Class-conditioned generative models are usually pre-trained on a class-labeled dataset such as [ImageNet-1k](https://huggingface.co/datasets/imagenet-1k). Popular metrics for evaluating these models include Fréchet Inception Distance (FID), Kernel Inception Distance (KID), and Inception Score (IS). In this document, we focus on FID ([Heusel et al.](https://arxiv.org/abs/1706.08500)). We show how to compute it with the [`DiTPipeline`](https://huggingface.co/docs/diffusers/api/pipelines/dit), which uses the [DiT model](https://arxiv.org/abs/2212.09748) under the hood.
FID aims to measure how similar are two datasets of images. As per [this resource](https://mmgeneration.readthedocs.io/en/latest/quick_run.html#fid):
> Fréchet Inception Distance is a measure of similarity between two datasets of images. It was shown to correlate well with the human judgment of visual quality and is most often used to evaluate the quality of samples of Generative Adversarial Networks. FID is calculated by computing the Fréchet distance between two Gaussians fitted to feature representations of the Inception network.
These two datasets are essentially the dataset of real images and the dataset of fake images (generated images in our case). FID is usually calculated with two large datasets. However, for this document, we will work with two mini datasets.
Let's first download a few images from the ImageNet-1k training set:
```python
from zipfile import ZipFile
import requests
def download(url, local_filepath):
r = requests.get(url)
with open(local_filepath, "wb") as f:
f.write(r.content)
return local_filepath
dummy_dataset_url = "https://hf.co/datasets/sayakpaul/sample-datasets/resolve/main/sample-imagenet-images.zip"
local_filepath = download(dummy_dataset_url, dummy_dataset_url.split("/")[-1])
with ZipFile(local_filepath, "r") as zipper:
zipper.extractall(".")
```
```python
from PIL import Image
import os
dataset_path = "sample-imagenet-images"
image_paths = sorted([os.path.join(dataset_path, x) for x in os.listdir(dataset_path)])
real_images = [np.array(Image.open(path).convert("RGB")) for path in image_paths]
```
These are 10 images from the following ImageNet-1k classes: "cassette_player", "chain_saw" (x2), "church", "gas_pump" (x3), "parachute" (x2), and "tench".
<p align="center">
<img src="https://huggingface.co/datasets/diffusers/docs-images/resolve/main/evaluation_diffusion_models/real-images.png" alt="real-images"><br>
<em>Real images.</em>
</p>
Now that the images are loaded, let's apply some lightweight pre-processing on them to use them for FID calculation.
```python
from torchvision.transforms import functional as F
def preprocess_image(image):
image = torch.tensor(image).unsqueeze(0)
image = image.permute(0, 3, 1, 2) / 255.0
return F.center_crop(image, (256, 256))
real_images = torch.cat([preprocess_image(image) for image in real_images])
print(real_images.shape)
# torch.Size([10, 3, 256, 256])
```
We now load the [`DiTPipeline`](https://huggingface.co/docs/diffusers/api/pipelines/dit) to generate images conditioned on the above-mentioned classes.
```python
from diffusers import DiTPipeline, DPMSolverMultistepScheduler
dit_pipeline = DiTPipeline.from_pretrained("facebook/DiT-XL-2-256", torch_dtype=torch.float16)
dit_pipeline.scheduler = DPMSolverMultistepScheduler.from_config(dit_pipeline.scheduler.config)
dit_pipeline = dit_pipeline.to("cuda")
words = [
"cassette player",
"chainsaw",
"chainsaw",
"church",
"gas pump",
"gas pump",
"gas pump",
"parachute",
"parachute",
"tench",
]
class_ids = dit_pipeline.get_label_ids(words)
output = dit_pipeline(class_labels=class_ids, generator=generator, output_type="np")
fake_images = output.images
fake_images = torch.tensor(fake_images)
fake_images = fake_images.permute(0, 3, 1, 2)
print(fake_images.shape)
# torch.Size([10, 3, 256, 256])
```
Now, we can compute the FID using [`torchmetrics`](https://torchmetrics.readthedocs.io/).
```python
from torchmetrics.image.fid import FrechetInceptionDistance
fid = FrechetInceptionDistance(normalize=True)
fid.update(real_images, real=True)
fid.update(fake_images, real=False)
print(f"FID: {float(fid.compute())}")
# FID: 177.7147216796875
```
The lower the FID, the better it is. Several things can influence FID here:
- Number of images (both real and fake)
- Randomness induced in the diffusion process
- Number of inference steps in the diffusion process
- The scheduler being used in the diffusion process
For the last two points, it is, therefore, a good practice to run the evaluation across different seeds and inference steps, and then report an average result.
<Tip warning={true}>
FID results tend to be fragile as they depend on a lot of factors:
* The specific Inception model used during computation.
* The implementation accuracy of the computation.
* The image format (not the same if we start from PNGs vs JPGs).
Keeping that in mind, FID is often most useful when comparing similar runs, but it is
hard to reproduce paper results unless the authors carefully disclose the FID
measurement code.
These points apply to other related metrics too, such as KID and IS.
</Tip>
As a final step, let's visually inspect the `fake_images`.
<p align="center">
<img src="https://huggingface.co/datasets/diffusers/docs-images/resolve/main/evaluation_diffusion_models/fake-images.png" alt="fake-images"><br>
<em>Fake images.</em>
</p>
| diffusers/docs/source/en/conceptual/evaluation.md/0 | {
"file_path": "diffusers/docs/source/en/conceptual/evaluation.md",
"repo_id": "diffusers",
"token_count": 8300
} | 80 |
<!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# PyTorch 2.0
🤗 Diffusers supports the latest optimizations from [PyTorch 2.0](https://pytorch.org/get-started/pytorch-2.0/) which include:
1. A memory-efficient attention implementation, scaled dot product attention, without requiring any extra dependencies such as xFormers.
2. [`torch.compile`](https://pytorch.org/tutorials/intermediate/torch_compile_tutorial.html), a just-in-time (JIT) compiler to provide an extra performance boost when individual models are compiled.
Both of these optimizations require PyTorch 2.0 or later and 🤗 Diffusers > 0.13.0.
```bash
pip install --upgrade torch diffusers
```
## Scaled dot product attention
[`torch.nn.functional.scaled_dot_product_attention`](https://pytorch.org/docs/master/generated/torch.nn.functional.scaled_dot_product_attention) (SDPA) is an optimized and memory-efficient attention (similar to xFormers) that automatically enables several other optimizations depending on the model inputs and GPU type. SDPA is enabled by default if you're using PyTorch 2.0 and the latest version of 🤗 Diffusers, so you don't need to add anything to your code.
However, if you want to explicitly enable it, you can set a [`DiffusionPipeline`] to use [`~models.attention_processor.AttnProcessor2_0`]:
```diff
import torch
from diffusers import DiffusionPipeline
+ from diffusers.models.attention_processor import AttnProcessor2_0
pipe = DiffusionPipeline.from_pretrained("runwayml/stable-diffusion-v1-5", torch_dtype=torch.float16, use_safetensors=True).to("cuda")
+ pipe.unet.set_attn_processor(AttnProcessor2_0())
prompt = "a photo of an astronaut riding a horse on mars"
image = pipe(prompt).images[0]
```
SDPA should be as fast and memory efficient as `xFormers`; check the [benchmark](#benchmark) for more details.
In some cases - such as making the pipeline more deterministic or converting it to other formats - it may be helpful to use the vanilla attention processor, [`~models.attention_processor.AttnProcessor`]. To revert to [`~models.attention_processor.AttnProcessor`], call the [`~UNet2DConditionModel.set_default_attn_processor`] function on the pipeline:
```diff
import torch
from diffusers import DiffusionPipeline
pipe = DiffusionPipeline.from_pretrained("runwayml/stable-diffusion-v1-5", torch_dtype=torch.float16, use_safetensors=True).to("cuda")
+ pipe.unet.set_default_attn_processor()
prompt = "a photo of an astronaut riding a horse on mars"
image = pipe(prompt).images[0]
```
## torch.compile
The `torch.compile` function can often provide an additional speed-up to your PyTorch code. In 🤗 Diffusers, it is usually best to wrap the UNet with `torch.compile` because it does most of the heavy lifting in the pipeline.
```python
from diffusers import DiffusionPipeline
import torch
pipe = DiffusionPipeline.from_pretrained("runwayml/stable-diffusion-v1-5", torch_dtype=torch.float16, use_safetensors=True).to("cuda")
pipe.unet = torch.compile(pipe.unet, mode="reduce-overhead", fullgraph=True)
images = pipe(prompt, num_inference_steps=steps, num_images_per_prompt=batch_size).images[0]
```
Depending on GPU type, `torch.compile` can provide an *additional speed-up* of **5-300x** on top of SDPA! If you're using more recent GPU architectures such as Ampere (A100, 3090), Ada (4090), and Hopper (H100), `torch.compile` is able to squeeze even more performance out of these GPUs.
Compilation requires some time to complete, so it is best suited for situations where you prepare your pipeline once and then perform the same type of inference operations multiple times. For example, calling the compiled pipeline on a different image size triggers compilation again which can be expensive.
For more information and different options about `torch.compile`, refer to the [`torch_compile`](https://pytorch.org/tutorials/intermediate/torch_compile_tutorial.html) tutorial.
## Benchmark
We conducted a comprehensive benchmark with PyTorch 2.0's efficient attention implementation and `torch.compile` across different GPUs and batch sizes for five of our most used pipelines. The code is benchmarked on 🤗 Diffusers v0.17.0.dev0 to optimize `torch.compile` usage (see [here](https://github.com/huggingface/diffusers/pull/3313) for more details).
Expand the dropdown below to find the code used to benchmark each pipeline:
<details>
### Stable Diffusion text-to-image
```python
from diffusers import DiffusionPipeline
import torch
path = "runwayml/stable-diffusion-v1-5"
run_compile = True # Set True / False
pipe = DiffusionPipeline.from_pretrained(path, torch_dtype=torch.float16, use_safetensors=True)
pipe = pipe.to("cuda")
pipe.unet.to(memory_format=torch.channels_last)
if run_compile:
print("Run torch compile")
pipe.unet = torch.compile(pipe.unet, mode="reduce-overhead", fullgraph=True)
prompt = "ghibli style, a fantasy landscape with castles"
for _ in range(3):
images = pipe(prompt=prompt).images
```
### Stable Diffusion image-to-image
```python
from diffusers import StableDiffusionImg2ImgPipeline
from diffusers.utils import load_image
import torch
url = "https://raw.githubusercontent.com/CompVis/stable-diffusion/main/assets/stable-samples/img2img/sketch-mountains-input.jpg"
init_image = load_image(url)
init_image = init_image.resize((512, 512))
path = "runwayml/stable-diffusion-v1-5"
run_compile = True # Set True / False
pipe = StableDiffusionImg2ImgPipeline.from_pretrained(path, torch_dtype=torch.float16, use_safetensors=True)
pipe = pipe.to("cuda")
pipe.unet.to(memory_format=torch.channels_last)
if run_compile:
print("Run torch compile")
pipe.unet = torch.compile(pipe.unet, mode="reduce-overhead", fullgraph=True)
prompt = "ghibli style, a fantasy landscape with castles"
for _ in range(3):
image = pipe(prompt=prompt, image=init_image).images[0]
```
### Stable Diffusion inpainting
```python
from diffusers import StableDiffusionInpaintPipeline
from diffusers.utils import load_image
import torch
img_url = "https://raw.githubusercontent.com/CompVis/latent-diffusion/main/data/inpainting_examples/overture-creations-5sI6fQgYIuo.png"
mask_url = "https://raw.githubusercontent.com/CompVis/latent-diffusion/main/data/inpainting_examples/overture-creations-5sI6fQgYIuo_mask.png"
init_image = load_image(img_url).resize((512, 512))
mask_image = load_image(mask_url).resize((512, 512))
path = "runwayml/stable-diffusion-inpainting"
run_compile = True # Set True / False
pipe = StableDiffusionInpaintPipeline.from_pretrained(path, torch_dtype=torch.float16, use_safetensors=True)
pipe = pipe.to("cuda")
pipe.unet.to(memory_format=torch.channels_last)
if run_compile:
print("Run torch compile")
pipe.unet = torch.compile(pipe.unet, mode="reduce-overhead", fullgraph=True)
prompt = "ghibli style, a fantasy landscape with castles"
for _ in range(3):
image = pipe(prompt=prompt, image=init_image, mask_image=mask_image).images[0]
```
### ControlNet
```python
from diffusers import StableDiffusionControlNetPipeline, ControlNetModel
from diffusers.utils import load_image
import torch
url = "https://raw.githubusercontent.com/CompVis/stable-diffusion/main/assets/stable-samples/img2img/sketch-mountains-input.jpg"
init_image = load_image(url)
init_image = init_image.resize((512, 512))
path = "runwayml/stable-diffusion-v1-5"
run_compile = True # Set True / False
controlnet = ControlNetModel.from_pretrained("lllyasviel/sd-controlnet-canny", torch_dtype=torch.float16, use_safetensors=True)
pipe = StableDiffusionControlNetPipeline.from_pretrained(
path, controlnet=controlnet, torch_dtype=torch.float16, use_safetensors=True
)
pipe = pipe.to("cuda")
pipe.unet.to(memory_format=torch.channels_last)
pipe.controlnet.to(memory_format=torch.channels_last)
if run_compile:
print("Run torch compile")
pipe.unet = torch.compile(pipe.unet, mode="reduce-overhead", fullgraph=True)
pipe.controlnet = torch.compile(pipe.controlnet, mode="reduce-overhead", fullgraph=True)
prompt = "ghibli style, a fantasy landscape with castles"
for _ in range(3):
image = pipe(prompt=prompt, image=init_image).images[0]
```
### DeepFloyd IF text-to-image + upscaling
```python
from diffusers import DiffusionPipeline
import torch
run_compile = True # Set True / False
pipe_1 = DiffusionPipeline.from_pretrained("DeepFloyd/IF-I-M-v1.0", variant="fp16", text_encoder=None, torch_dtype=torch.float16, use_safetensors=True)
pipe_1.to("cuda")
pipe_2 = DiffusionPipeline.from_pretrained("DeepFloyd/IF-II-M-v1.0", variant="fp16", text_encoder=None, torch_dtype=torch.float16, use_safetensors=True)
pipe_2.to("cuda")
pipe_3 = DiffusionPipeline.from_pretrained("stabilityai/stable-diffusion-x4-upscaler", torch_dtype=torch.float16, use_safetensors=True)
pipe_3.to("cuda")
pipe_1.unet.to(memory_format=torch.channels_last)
pipe_2.unet.to(memory_format=torch.channels_last)
pipe_3.unet.to(memory_format=torch.channels_last)
if run_compile:
pipe_1.unet = torch.compile(pipe_1.unet, mode="reduce-overhead", fullgraph=True)
pipe_2.unet = torch.compile(pipe_2.unet, mode="reduce-overhead", fullgraph=True)
pipe_3.unet = torch.compile(pipe_3.unet, mode="reduce-overhead", fullgraph=True)
prompt = "the blue hulk"
prompt_embeds = torch.randn((1, 2, 4096), dtype=torch.float16)
neg_prompt_embeds = torch.randn((1, 2, 4096), dtype=torch.float16)
for _ in range(3):
image_1 = pipe_1(prompt_embeds=prompt_embeds, negative_prompt_embeds=neg_prompt_embeds, output_type="pt").images
image_2 = pipe_2(image=image_1, prompt_embeds=prompt_embeds, negative_prompt_embeds=neg_prompt_embeds, output_type="pt").images
image_3 = pipe_3(prompt=prompt, image=image_1, noise_level=100).images
```
</details>
The graph below highlights the relative speed-ups for the [`StableDiffusionPipeline`] across five GPU families with PyTorch 2.0 and `torch.compile` enabled. The benchmarks for the following graphs are measured in *number of iterations/second*.
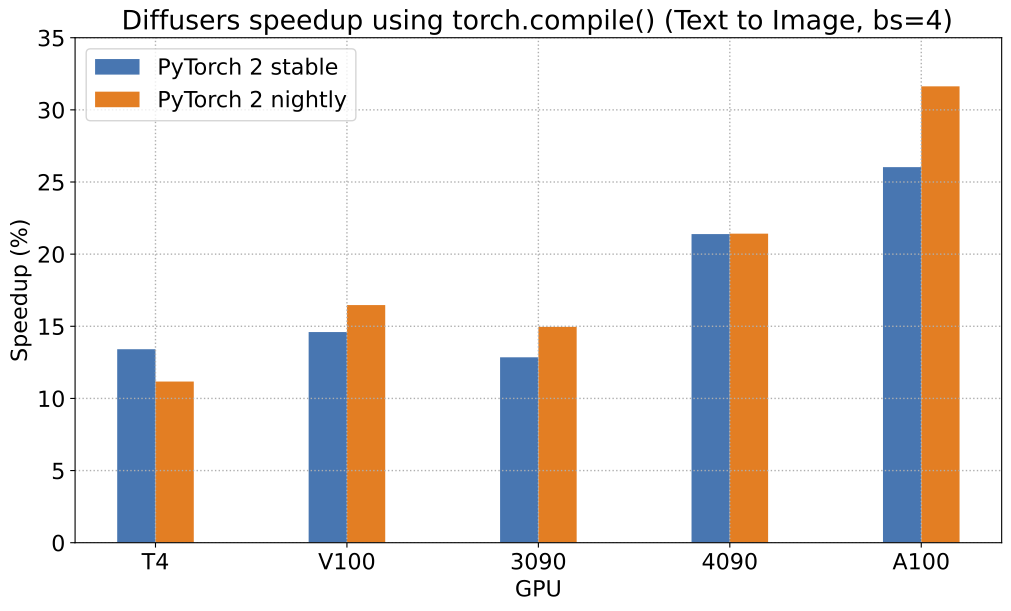
To give you an even better idea of how this speed-up holds for the other pipelines, consider the following
graph for an A100 with PyTorch 2.0 and `torch.compile`:
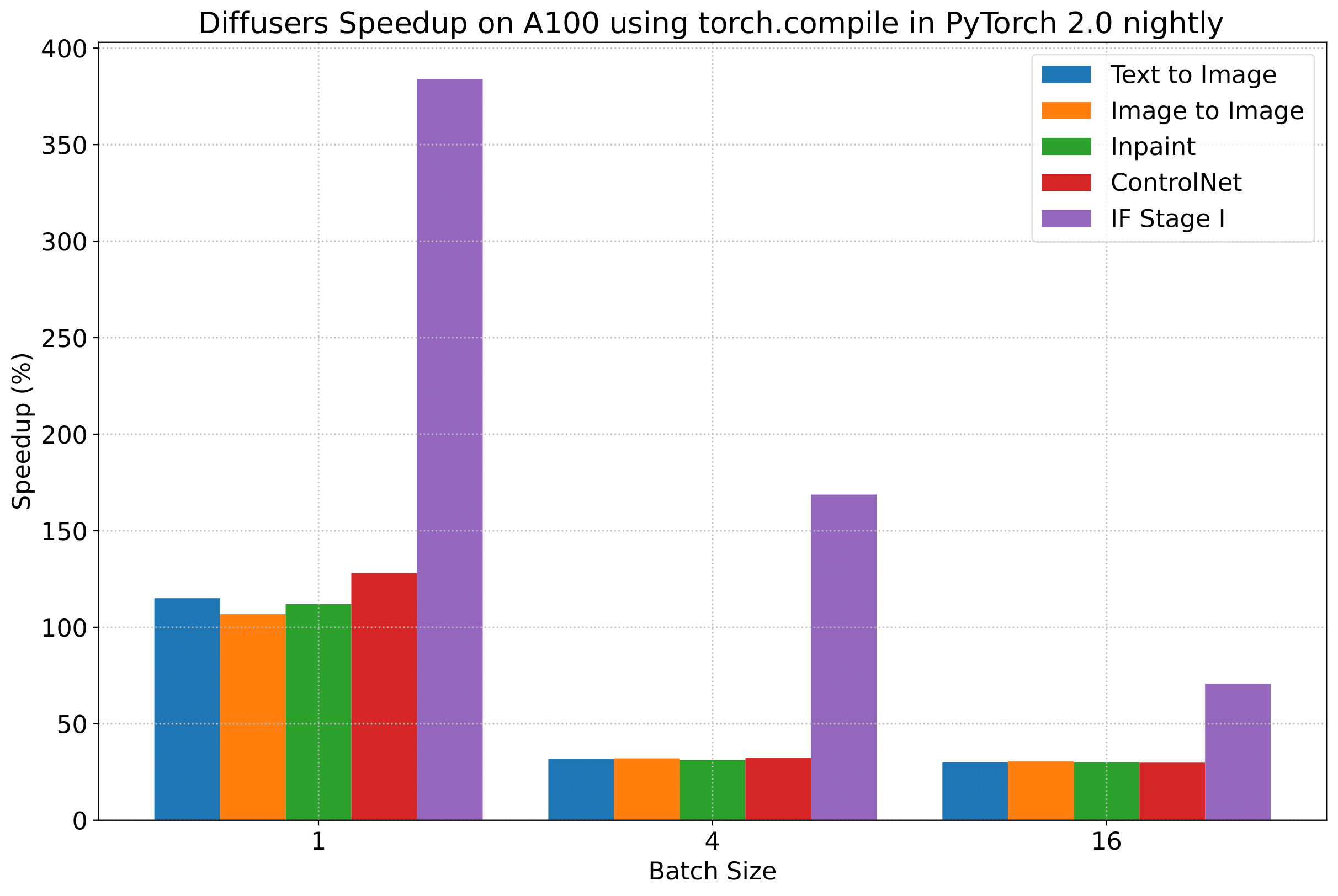
In the following tables, we report our findings in terms of the *number of iterations/second*.
### A100 (batch size: 1)
| **Pipeline** | **torch 2.0 - <br>no compile** | **torch nightly - <br>no compile** | **torch 2.0 - <br>compile** | **torch nightly - <br>compile** |
|:---:|:---:|:---:|:---:|:---:|
| SD - txt2img | 21.66 | 23.13 | 44.03 | 49.74 |
| SD - img2img | 21.81 | 22.40 | 43.92 | 46.32 |
| SD - inpaint | 22.24 | 23.23 | 43.76 | 49.25 |
| SD - controlnet | 15.02 | 15.82 | 32.13 | 36.08 |
| IF | 20.21 / <br>13.84 / <br>24.00 | 20.12 / <br>13.70 / <br>24.03 | ❌ | 97.34 / <br>27.23 / <br>111.66 |
| SDXL - txt2img | 8.64 | 9.9 | - | - |
### A100 (batch size: 4)
| **Pipeline** | **torch 2.0 - <br>no compile** | **torch nightly - <br>no compile** | **torch 2.0 - <br>compile** | **torch nightly - <br>compile** |
|:---:|:---:|:---:|:---:|:---:|
| SD - txt2img | 11.6 | 13.12 | 14.62 | 17.27 |
| SD - img2img | 11.47 | 13.06 | 14.66 | 17.25 |
| SD - inpaint | 11.67 | 13.31 | 14.88 | 17.48 |
| SD - controlnet | 8.28 | 9.38 | 10.51 | 12.41 |
| IF | 25.02 | 18.04 | ❌ | 48.47 |
| SDXL - txt2img | 2.44 | 2.74 | - | - |
### A100 (batch size: 16)
| **Pipeline** | **torch 2.0 - <br>no compile** | **torch nightly - <br>no compile** | **torch 2.0 - <br>compile** | **torch nightly - <br>compile** |
|:---:|:---:|:---:|:---:|:---:|
| SD - txt2img | 3.04 | 3.6 | 3.83 | 4.68 |
| SD - img2img | 2.98 | 3.58 | 3.83 | 4.67 |
| SD - inpaint | 3.04 | 3.66 | 3.9 | 4.76 |
| SD - controlnet | 2.15 | 2.58 | 2.74 | 3.35 |
| IF | 8.78 | 9.82 | ❌ | 16.77 |
| SDXL - txt2img | 0.64 | 0.72 | - | - |
### V100 (batch size: 1)
| **Pipeline** | **torch 2.0 - <br>no compile** | **torch nightly - <br>no compile** | **torch 2.0 - <br>compile** | **torch nightly - <br>compile** |
|:---:|:---:|:---:|:---:|:---:|
| SD - txt2img | 18.99 | 19.14 | 20.95 | 22.17 |
| SD - img2img | 18.56 | 19.18 | 20.95 | 22.11 |
| SD - inpaint | 19.14 | 19.06 | 21.08 | 22.20 |
| SD - controlnet | 13.48 | 13.93 | 15.18 | 15.88 |
| IF | 20.01 / <br>9.08 / <br>23.34 | 19.79 / <br>8.98 / <br>24.10 | ❌ | 55.75 / <br>11.57 / <br>57.67 |
### V100 (batch size: 4)
| **Pipeline** | **torch 2.0 - <br>no compile** | **torch nightly - <br>no compile** | **torch 2.0 - <br>compile** | **torch nightly - <br>compile** |
|:---:|:---:|:---:|:---:|:---:|
| SD - txt2img | 5.96 | 5.89 | 6.83 | 6.86 |
| SD - img2img | 5.90 | 5.91 | 6.81 | 6.82 |
| SD - inpaint | 5.99 | 6.03 | 6.93 | 6.95 |
| SD - controlnet | 4.26 | 4.29 | 4.92 | 4.93 |
| IF | 15.41 | 14.76 | ❌ | 22.95 |
### V100 (batch size: 16)
| **Pipeline** | **torch 2.0 - <br>no compile** | **torch nightly - <br>no compile** | **torch 2.0 - <br>compile** | **torch nightly - <br>compile** |
|:---:|:---:|:---:|:---:|:---:|
| SD - txt2img | 1.66 | 1.66 | 1.92 | 1.90 |
| SD - img2img | 1.65 | 1.65 | 1.91 | 1.89 |
| SD - inpaint | 1.69 | 1.69 | 1.95 | 1.93 |
| SD - controlnet | 1.19 | 1.19 | OOM after warmup | 1.36 |
| IF | 5.43 | 5.29 | ❌ | 7.06 |
### T4 (batch size: 1)
| **Pipeline** | **torch 2.0 - <br>no compile** | **torch nightly - <br>no compile** | **torch 2.0 - <br>compile** | **torch nightly - <br>compile** |
|:---:|:---:|:---:|:---:|:---:|
| SD - txt2img | 6.9 | 6.95 | 7.3 | 7.56 |
| SD - img2img | 6.84 | 6.99 | 7.04 | 7.55 |
| SD - inpaint | 6.91 | 6.7 | 7.01 | 7.37 |
| SD - controlnet | 4.89 | 4.86 | 5.35 | 5.48 |
| IF | 17.42 / <br>2.47 / <br>18.52 | 16.96 / <br>2.45 / <br>18.69 | ❌ | 24.63 / <br>2.47 / <br>23.39 |
| SDXL - txt2img | 1.15 | 1.16 | - | - |
### T4 (batch size: 4)
| **Pipeline** | **torch 2.0 - <br>no compile** | **torch nightly - <br>no compile** | **torch 2.0 - <br>compile** | **torch nightly - <br>compile** |
|:---:|:---:|:---:|:---:|:---:|
| SD - txt2img | 1.79 | 1.79 | 2.03 | 1.99 |
| SD - img2img | 1.77 | 1.77 | 2.05 | 2.04 |
| SD - inpaint | 1.81 | 1.82 | 2.09 | 2.09 |
| SD - controlnet | 1.34 | 1.27 | 1.47 | 1.46 |
| IF | 5.79 | 5.61 | ❌ | 7.39 |
| SDXL - txt2img | 0.288 | 0.289 | - | - |
### T4 (batch size: 16)
| **Pipeline** | **torch 2.0 - <br>no compile** | **torch nightly - <br>no compile** | **torch 2.0 - <br>compile** | **torch nightly - <br>compile** |
|:---:|:---:|:---:|:---:|:---:|
| SD - txt2img | 2.34s | 2.30s | OOM after 2nd iteration | 1.99s |
| SD - img2img | 2.35s | 2.31s | OOM after warmup | 2.00s |
| SD - inpaint | 2.30s | 2.26s | OOM after 2nd iteration | 1.95s |
| SD - controlnet | OOM after 2nd iteration | OOM after 2nd iteration | OOM after warmup | OOM after warmup |
| IF * | 1.44 | 1.44 | ❌ | 1.94 |
| SDXL - txt2img | OOM | OOM | - | - |
### RTX 3090 (batch size: 1)
| **Pipeline** | **torch 2.0 - <br>no compile** | **torch nightly - <br>no compile** | **torch 2.0 - <br>compile** | **torch nightly - <br>compile** |
|:---:|:---:|:---:|:---:|:---:|
| SD - txt2img | 22.56 | 22.84 | 23.84 | 25.69 |
| SD - img2img | 22.25 | 22.61 | 24.1 | 25.83 |
| SD - inpaint | 22.22 | 22.54 | 24.26 | 26.02 |
| SD - controlnet | 16.03 | 16.33 | 17.38 | 18.56 |
| IF | 27.08 / <br>9.07 / <br>31.23 | 26.75 / <br>8.92 / <br>31.47 | ❌ | 68.08 / <br>11.16 / <br>65.29 |
### RTX 3090 (batch size: 4)
| **Pipeline** | **torch 2.0 - <br>no compile** | **torch nightly - <br>no compile** | **torch 2.0 - <br>compile** | **torch nightly - <br>compile** |
|:---:|:---:|:---:|:---:|:---:|
| SD - txt2img | 6.46 | 6.35 | 7.29 | 7.3 |
| SD - img2img | 6.33 | 6.27 | 7.31 | 7.26 |
| SD - inpaint | 6.47 | 6.4 | 7.44 | 7.39 |
| SD - controlnet | 4.59 | 4.54 | 5.27 | 5.26 |
| IF | 16.81 | 16.62 | ❌ | 21.57 |
### RTX 3090 (batch size: 16)
| **Pipeline** | **torch 2.0 - <br>no compile** | **torch nightly - <br>no compile** | **torch 2.0 - <br>compile** | **torch nightly - <br>compile** |
|:---:|:---:|:---:|:---:|:---:|
| SD - txt2img | 1.7 | 1.69 | 1.93 | 1.91 |
| SD - img2img | 1.68 | 1.67 | 1.93 | 1.9 |
| SD - inpaint | 1.72 | 1.71 | 1.97 | 1.94 |
| SD - controlnet | 1.23 | 1.22 | 1.4 | 1.38 |
| IF | 5.01 | 5.00 | ❌ | 6.33 |
### RTX 4090 (batch size: 1)
| **Pipeline** | **torch 2.0 - <br>no compile** | **torch nightly - <br>no compile** | **torch 2.0 - <br>compile** | **torch nightly - <br>compile** |
|:---:|:---:|:---:|:---:|:---:|
| SD - txt2img | 40.5 | 41.89 | 44.65 | 49.81 |
| SD - img2img | 40.39 | 41.95 | 44.46 | 49.8 |
| SD - inpaint | 40.51 | 41.88 | 44.58 | 49.72 |
| SD - controlnet | 29.27 | 30.29 | 32.26 | 36.03 |
| IF | 69.71 / <br>18.78 / <br>85.49 | 69.13 / <br>18.80 / <br>85.56 | ❌ | 124.60 / <br>26.37 / <br>138.79 |
| SDXL - txt2img | 6.8 | 8.18 | - | - |
### RTX 4090 (batch size: 4)
| **Pipeline** | **torch 2.0 - <br>no compile** | **torch nightly - <br>no compile** | **torch 2.0 - <br>compile** | **torch nightly - <br>compile** |
|:---:|:---:|:---:|:---:|:---:|
| SD - txt2img | 12.62 | 12.84 | 15.32 | 15.59 |
| SD - img2img | 12.61 | 12,.79 | 15.35 | 15.66 |
| SD - inpaint | 12.65 | 12.81 | 15.3 | 15.58 |
| SD - controlnet | 9.1 | 9.25 | 11.03 | 11.22 |
| IF | 31.88 | 31.14 | ❌ | 43.92 |
| SDXL - txt2img | 2.19 | 2.35 | - | - |
### RTX 4090 (batch size: 16)
| **Pipeline** | **torch 2.0 - <br>no compile** | **torch nightly - <br>no compile** | **torch 2.0 - <br>compile** | **torch nightly - <br>compile** |
|:---:|:---:|:---:|:---:|:---:|
| SD - txt2img | 3.17 | 3.2 | 3.84 | 3.85 |
| SD - img2img | 3.16 | 3.2 | 3.84 | 3.85 |
| SD - inpaint | 3.17 | 3.2 | 3.85 | 3.85 |
| SD - controlnet | 2.23 | 2.3 | 2.7 | 2.75 |
| IF | 9.26 | 9.2 | ❌ | 13.31 |
| SDXL - txt2img | 0.52 | 0.53 | - | - |
## Notes
* Follow this [PR](https://github.com/huggingface/diffusers/pull/3313) for more details on the environment used for conducting the benchmarks.
* For the DeepFloyd IF pipeline where batch sizes > 1, we only used a batch size of > 1 in the first IF pipeline for text-to-image generation and NOT for upscaling. That means the two upscaling pipelines received a batch size of 1.
*Thanks to [Horace He](https://github.com/Chillee) from the PyTorch team for their support in improving our support of `torch.compile()` in Diffusers.*
| diffusers/docs/source/en/optimization/torch2.0.md/0 | {
"file_path": "diffusers/docs/source/en/optimization/torch2.0.md",
"repo_id": "diffusers",
"token_count": 7438
} | 81 |
<!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# Stable Diffusion XL
<Tip warning={true}>
This script is experimental, and it's easy to overfit and run into issues like catastrophic forgetting. Try exploring different hyperparameters to get the best results on your dataset.
</Tip>
[Stable Diffusion XL (SDXL)](https://hf.co/papers/2307.01952) is a larger and more powerful iteration of the Stable Diffusion model, capable of producing higher resolution images.
SDXL's UNet is 3x larger and the model adds a second text encoder to the architecture. Depending on the hardware available to you, this can be very computationally intensive and it may not run on a consumer GPU like a Tesla T4. To help fit this larger model into memory and to speedup training, try enabling `gradient_checkpointing`, `mixed_precision`, and `gradient_accumulation_steps`. You can reduce your memory-usage even more by enabling memory-efficient attention with [xFormers](../optimization/xformers) and using [bitsandbytes'](https://github.com/TimDettmers/bitsandbytes) 8-bit optimizer.
This guide will explore the [train_text_to_image_sdxl.py](https://github.com/huggingface/diffusers/blob/main/examples/text_to_image/train_text_to_image_sdxl.py) training script to help you become more familiar with it, and how you can adapt it for your own use-case.
Before running the script, make sure you install the library from source:
```bash
git clone https://github.com/huggingface/diffusers
cd diffusers
pip install .
```
Then navigate to the example folder containing the training script and install the required dependencies for the script you're using:
```bash
cd examples/text_to_image
pip install -r requirements_sdxl.txt
```
<Tip>
🤗 Accelerate is a library for helping you train on multiple GPUs/TPUs or with mixed-precision. It'll automatically configure your training setup based on your hardware and environment. Take a look at the 🤗 Accelerate [Quick tour](https://huggingface.co/docs/accelerate/quicktour) to learn more.
</Tip>
Initialize an 🤗 Accelerate environment:
```bash
accelerate config
```
To setup a default 🤗 Accelerate environment without choosing any configurations:
```bash
accelerate config default
```
Or if your environment doesn't support an interactive shell, like a notebook, you can use:
```bash
from accelerate.utils import write_basic_config
write_basic_config()
```
Lastly, if you want to train a model on your own dataset, take a look at the [Create a dataset for training](create_dataset) guide to learn how to create a dataset that works with the training script.
## Script parameters
<Tip>
The following sections highlight parts of the training script that are important for understanding how to modify it, but it doesn't cover every aspect of the script in detail. If you're interested in learning more, feel free to read through the [script](https://github.com/huggingface/diffusers/blob/main/examples/text_to_image/train_text_to_image_sdxl.py) and let us know if you have any questions or concerns.
</Tip>
The training script provides many parameters to help you customize your training run. All of the parameters and their descriptions are found in the [`parse_args()`](https://github.com/huggingface/diffusers/blob/aab6de22c33cc01fb7bc81c0807d6109e2c998c9/examples/text_to_image/train_text_to_image_sdxl.py#L129) function. This function provides default values for each parameter, such as the training batch size and learning rate, but you can also set your own values in the training command if you'd like.
For example, to speedup training with mixed precision using the bf16 format, add the `--mixed_precision` parameter to the training command:
```bash
accelerate launch train_text_to_image_sdxl.py \
--mixed_precision="bf16"
```
Most of the parameters are identical to the parameters in the [Text-to-image](text2image#script-parameters) training guide, so you'll focus on the parameters that are relevant to training SDXL in this guide.
- `--pretrained_vae_model_name_or_path`: path to a pretrained VAE; the SDXL VAE is known to suffer from numerical instability, so this parameter allows you to specify a better [VAE](https://huggingface.co/madebyollin/sdxl-vae-fp16-fix)
- `--proportion_empty_prompts`: the proportion of image prompts to replace with empty strings
- `--timestep_bias_strategy`: where (earlier vs. later) in the timestep to apply a bias, which can encourage the model to either learn low or high frequency details
- `--timestep_bias_multiplier`: the weight of the bias to apply to the timestep
- `--timestep_bias_begin`: the timestep to begin applying the bias
- `--timestep_bias_end`: the timestep to end applying the bias
- `--timestep_bias_portion`: the proportion of timesteps to apply the bias to
### Min-SNR weighting
The [Min-SNR](https://huggingface.co/papers/2303.09556) weighting strategy can help with training by rebalancing the loss to achieve faster convergence. The training script supports predicting either `epsilon` (noise) or `v_prediction`, but Min-SNR is compatible with both prediction types. This weighting strategy is only supported by PyTorch and is unavailable in the Flax training script.
Add the `--snr_gamma` parameter and set it to the recommended value of 5.0:
```bash
accelerate launch train_text_to_image_sdxl.py \
--snr_gamma=5.0
```
## Training script
The training script is also similar to the [Text-to-image](text2image#training-script) training guide, but it's been modified to support SDXL training. This guide will focus on the code that is unique to the SDXL training script.
It starts by creating functions to [tokenize the prompts](https://github.com/huggingface/diffusers/blob/aab6de22c33cc01fb7bc81c0807d6109e2c998c9/examples/text_to_image/train_text_to_image_sdxl.py#L478) to calculate the prompt embeddings, and to compute the image embeddings with the [VAE](https://github.com/huggingface/diffusers/blob/aab6de22c33cc01fb7bc81c0807d6109e2c998c9/examples/text_to_image/train_text_to_image_sdxl.py#L519). Next, you'll a function to [generate the timesteps weights](https://github.com/huggingface/diffusers/blob/aab6de22c33cc01fb7bc81c0807d6109e2c998c9/examples/text_to_image/train_text_to_image_sdxl.py#L531) depending on the number of timesteps and the timestep bias strategy to apply.
Within the [`main()`](https://github.com/huggingface/diffusers/blob/aab6de22c33cc01fb7bc81c0807d6109e2c998c9/examples/text_to_image/train_text_to_image_sdxl.py#L572) function, in addition to loading a tokenizer, the script loads a second tokenizer and text encoder because the SDXL architecture uses two of each:
```py
tokenizer_one = AutoTokenizer.from_pretrained(
args.pretrained_model_name_or_path, subfolder="tokenizer", revision=args.revision, use_fast=False
)
tokenizer_two = AutoTokenizer.from_pretrained(
args.pretrained_model_name_or_path, subfolder="tokenizer_2", revision=args.revision, use_fast=False
)
text_encoder_cls_one = import_model_class_from_model_name_or_path(
args.pretrained_model_name_or_path, args.revision
)
text_encoder_cls_two = import_model_class_from_model_name_or_path(
args.pretrained_model_name_or_path, args.revision, subfolder="text_encoder_2"
)
```
The [prompt and image embeddings](https://github.com/huggingface/diffusers/blob/aab6de22c33cc01fb7bc81c0807d6109e2c998c9/examples/text_to_image/train_text_to_image_sdxl.py#L857) are computed first and kept in memory, which isn't typically an issue for a smaller dataset, but for larger datasets it can lead to memory problems. If this is the case, you should save the pre-computed embeddings to disk separately and load them into memory during the training process (see this [PR](https://github.com/huggingface/diffusers/pull/4505) for more discussion about this topic).
```py
text_encoders = [text_encoder_one, text_encoder_two]
tokenizers = [tokenizer_one, tokenizer_two]
compute_embeddings_fn = functools.partial(
encode_prompt,
text_encoders=text_encoders,
tokenizers=tokenizers,
proportion_empty_prompts=args.proportion_empty_prompts,
caption_column=args.caption_column,
)
train_dataset = train_dataset.map(compute_embeddings_fn, batched=True, new_fingerprint=new_fingerprint)
train_dataset = train_dataset.map(
compute_vae_encodings_fn,
batched=True,
batch_size=args.train_batch_size * accelerator.num_processes * args.gradient_accumulation_steps,
new_fingerprint=new_fingerprint_for_vae,
)
```
After calculating the embeddings, the text encoder, VAE, and tokenizer are deleted to free up some memory:
```py
del text_encoders, tokenizers, vae
gc.collect()
torch.cuda.empty_cache()
```
Finally, the [training loop](https://github.com/huggingface/diffusers/blob/aab6de22c33cc01fb7bc81c0807d6109e2c998c9/examples/text_to_image/train_text_to_image_sdxl.py#L943) takes care of the rest. If you chose to apply a timestep bias strategy, you'll see the timestep weights are calculated and added as noise:
```py
weights = generate_timestep_weights(args, noise_scheduler.config.num_train_timesteps).to(
model_input.device
)
timesteps = torch.multinomial(weights, bsz, replacement=True).long()
noisy_model_input = noise_scheduler.add_noise(model_input, noise, timesteps)
```
If you want to learn more about how the training loop works, check out the [Understanding pipelines, models and schedulers](../using-diffusers/write_own_pipeline) tutorial which breaks down the basic pattern of the denoising process.
## Launch the script
Once you’ve made all your changes or you’re okay with the default configuration, you’re ready to launch the training script! 🚀
Let’s train on the [Pokémon BLIP captions](https://huggingface.co/datasets/lambdalabs/pokemon-blip-captions) dataset to generate your own Pokémon. Set the environment variables `MODEL_NAME` and `DATASET_NAME` to the model and the dataset (either from the Hub or a local path). You should also specify a VAE other than the SDXL VAE (either from the Hub or a local path) with `VAE_NAME` to avoid numerical instabilities.
<Tip>
To monitor training progress with Weights & Biases, add the `--report_to=wandb` parameter to the training command. You’ll also need to add the `--validation_prompt` and `--validation_epochs` to the training command to keep track of results. This can be really useful for debugging the model and viewing intermediate results.
</Tip>
```bash
export MODEL_NAME="stabilityai/stable-diffusion-xl-base-1.0"
export VAE_NAME="madebyollin/sdxl-vae-fp16-fix"
export DATASET_NAME="lambdalabs/pokemon-blip-captions"
accelerate launch train_text_to_image_sdxl.py \
--pretrained_model_name_or_path=$MODEL_NAME \
--pretrained_vae_model_name_or_path=$VAE_NAME \
--dataset_name=$DATASET_NAME \
--enable_xformers_memory_efficient_attention \
--resolution=512 \
--center_crop \
--random_flip \
--proportion_empty_prompts=0.2 \
--train_batch_size=1 \
--gradient_accumulation_steps=4 \
--gradient_checkpointing \
--max_train_steps=10000 \
--use_8bit_adam \
--learning_rate=1e-06 \
--lr_scheduler="constant" \
--lr_warmup_steps=0 \
--mixed_precision="fp16" \
--report_to="wandb" \
--validation_prompt="a cute Sundar Pichai creature" \
--validation_epochs 5 \
--checkpointing_steps=5000 \
--output_dir="sdxl-pokemon-model" \
--push_to_hub
```
After you've finished training, you can use your newly trained SDXL model for inference!
<hfoptions id="inference">
<hfoption id="PyTorch">
```py
from diffusers import DiffusionPipeline
import torch
pipeline = DiffusionPipeline.from_pretrained("path/to/your/model", torch_dtype=torch.float16).to("cuda")
prompt = "A pokemon with green eyes and red legs."
image = pipeline(prompt, num_inference_steps=30, guidance_scale=7.5).images[0]
image.save("pokemon.png")
```
</hfoption>
<hfoption id="PyTorch XLA">
[PyTorch XLA](https://pytorch.org/xla) allows you to run PyTorch on XLA devices such as TPUs, which can be faster. The initial warmup step takes longer because the model needs to be compiled and optimized. However, subsequent calls to the pipeline on an input **with the same length** as the original prompt are much faster because it can reuse the optimized graph.
```py
from diffusers import DiffusionPipeline
import torch
import torch_xla.core.xla_model as xm
device = xm.xla_device()
pipeline = DiffusionPipeline.from_pretrained("stabilityai/stable-diffusion-xl-base-1.0").to(device)
prompt = "A pokemon with green eyes and red legs."
start = time()
image = pipeline(prompt, num_inference_steps=inference_steps).images[0]
print(f'Compilation time is {time()-start} sec')
image.save("pokemon.png")
start = time()
image = pipeline(prompt, num_inference_steps=inference_steps).images[0]
print(f'Inference time is {time()-start} sec after compilation')
```
</hfoption>
</hfoptions>
## Next steps
Congratulations on training a SDXL model! To learn more about how to use your new model, the following guides may be helpful:
- Read the [Stable Diffusion XL](../using-diffusers/sdxl) guide to learn how to use it for a variety of different tasks (text-to-image, image-to-image, inpainting), how to use it's refiner model, and the different types of micro-conditionings.
- Check out the [DreamBooth](dreambooth) and [LoRA](lora) training guides to learn how to train a personalized SDXL model with just a few example images. These two training techniques can even be combined! | diffusers/docs/source/en/training/sdxl.md/0 | {
"file_path": "diffusers/docs/source/en/training/sdxl.md",
"repo_id": "diffusers",
"token_count": 4390
} | 82 |
<!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# ControlNet
ControlNet is a type of model for controlling image diffusion models by conditioning the model with an additional input image. There are many types of conditioning inputs (canny edge, user sketching, human pose, depth, and more) you can use to control a diffusion model. This is hugely useful because it affords you greater control over image generation, making it easier to generate specific images without experimenting with different text prompts or denoising values as much.
<Tip>
Check out Section 3.5 of the [ControlNet](https://huggingface.co/papers/2302.05543) paper v1 for a list of ControlNet implementations on various conditioning inputs. You can find the official Stable Diffusion ControlNet conditioned models on [lllyasviel](https://huggingface.co/lllyasviel)'s Hub profile, and more [community-trained](https://huggingface.co/models?other=stable-diffusion&other=controlnet) ones on the Hub.
For Stable Diffusion XL (SDXL) ControlNet models, you can find them on the 🤗 [Diffusers](https://huggingface.co/diffusers) Hub organization, or you can browse [community-trained](https://huggingface.co/models?other=stable-diffusion-xl&other=controlnet) ones on the Hub.
</Tip>
A ControlNet model has two sets of weights (or blocks) connected by a zero-convolution layer:
- a *locked copy* keeps everything a large pretrained diffusion model has learned
- a *trainable copy* is trained on the additional conditioning input
Since the locked copy preserves the pretrained model, training and implementing a ControlNet on a new conditioning input is as fast as finetuning any other model because you aren't training the model from scratch.
This guide will show you how to use ControlNet for text-to-image, image-to-image, inpainting, and more! There are many types of ControlNet conditioning inputs to choose from, but in this guide we'll only focus on several of them. Feel free to experiment with other conditioning inputs!
Before you begin, make sure you have the following libraries installed:
```py
# uncomment to install the necessary libraries in Colab
#!pip install -q diffusers transformers accelerate opencv-python
```
## Text-to-image
For text-to-image, you normally pass a text prompt to the model. But with ControlNet, you can specify an additional conditioning input. Let's condition the model with a canny image, a white outline of an image on a black background. This way, the ControlNet can use the canny image as a control to guide the model to generate an image with the same outline.
Load an image and use the [opencv-python](https://github.com/opencv/opencv-python) library to extract the canny image:
```py
from diffusers.utils import load_image, make_image_grid
from PIL import Image
import cv2
import numpy as np
original_image = load_image(
"https://hf.co/datasets/huggingface/documentation-images/resolve/main/diffusers/input_image_vermeer.png"
)
image = np.array(original_image)
low_threshold = 100
high_threshold = 200
image = cv2.Canny(image, low_threshold, high_threshold)
image = image[:, :, None]
image = np.concatenate([image, image, image], axis=2)
canny_image = Image.fromarray(image)
```
<div class="flex gap-4">
<div>
<img class="rounded-xl" src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/input_image_vermeer.png"/>
<figcaption class="mt-2 text-center text-sm text-gray-500">original image</figcaption>
</div>
<div>
<img class="rounded-xl" src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/vermeer_canny_edged.png"/>
<figcaption class="mt-2 text-center text-sm text-gray-500">canny image</figcaption>
</div>
</div>
Next, load a ControlNet model conditioned on canny edge detection and pass it to the [`StableDiffusionControlNetPipeline`]. Use the faster [`UniPCMultistepScheduler`] and enable model offloading to speed up inference and reduce memory usage.
```py
from diffusers import StableDiffusionControlNetPipeline, ControlNetModel, UniPCMultistepScheduler
import torch
controlnet = ControlNetModel.from_pretrained("lllyasviel/sd-controlnet-canny", torch_dtype=torch.float16, use_safetensors=True)
pipe = StableDiffusionControlNetPipeline.from_pretrained(
"runwayml/stable-diffusion-v1-5", controlnet=controlnet, torch_dtype=torch.float16, use_safetensors=True
)
pipe.scheduler = UniPCMultistepScheduler.from_config(pipe.scheduler.config)
pipe.enable_model_cpu_offload()
```
Now pass your prompt and canny image to the pipeline:
```py
output = pipe(
"the mona lisa", image=canny_image
).images[0]
make_image_grid([original_image, canny_image, output], rows=1, cols=3)
```
<div class="flex justify-center">
<img src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/controlnet-text2img.png"/>
</div>
## Image-to-image
For image-to-image, you'd typically pass an initial image and a prompt to the pipeline to generate a new image. With ControlNet, you can pass an additional conditioning input to guide the model. Let's condition the model with a depth map, an image which contains spatial information. This way, the ControlNet can use the depth map as a control to guide the model to generate an image that preserves spatial information.
You'll use the [`StableDiffusionControlNetImg2ImgPipeline`] for this task, which is different from the [`StableDiffusionControlNetPipeline`] because it allows you to pass an initial image as the starting point for the image generation process.
Load an image and use the `depth-estimation` [`~transformers.Pipeline`] from 🤗 Transformers to extract the depth map of an image:
```py
import torch
import numpy as np
from transformers import pipeline
from diffusers.utils import load_image, make_image_grid
image = load_image(
"https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/controlnet-img2img.jpg"
)
def get_depth_map(image, depth_estimator):
image = depth_estimator(image)["depth"]
image = np.array(image)
image = image[:, :, None]
image = np.concatenate([image, image, image], axis=2)
detected_map = torch.from_numpy(image).float() / 255.0
depth_map = detected_map.permute(2, 0, 1)
return depth_map
depth_estimator = pipeline("depth-estimation")
depth_map = get_depth_map(image, depth_estimator).unsqueeze(0).half().to("cuda")
```
Next, load a ControlNet model conditioned on depth maps and pass it to the [`StableDiffusionControlNetImg2ImgPipeline`]. Use the faster [`UniPCMultistepScheduler`] and enable model offloading to speed up inference and reduce memory usage.
```py
from diffusers import StableDiffusionControlNetImg2ImgPipeline, ControlNetModel, UniPCMultistepScheduler
import torch
controlnet = ControlNetModel.from_pretrained("lllyasviel/control_v11f1p_sd15_depth", torch_dtype=torch.float16, use_safetensors=True)
pipe = StableDiffusionControlNetImg2ImgPipeline.from_pretrained(
"runwayml/stable-diffusion-v1-5", controlnet=controlnet, torch_dtype=torch.float16, use_safetensors=True
)
pipe.scheduler = UniPCMultistepScheduler.from_config(pipe.scheduler.config)
pipe.enable_model_cpu_offload()
```
Now pass your prompt, initial image, and depth map to the pipeline:
```py
output = pipe(
"lego batman and robin", image=image, control_image=depth_map,
).images[0]
make_image_grid([image, output], rows=1, cols=2)
```
<div class="flex gap-4">
<div>
<img class="rounded-xl" src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/controlnet-img2img.jpg"/>
<figcaption class="mt-2 text-center text-sm text-gray-500">original image</figcaption>
</div>
<div>
<img class="rounded-xl" src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/controlnet-img2img-2.png"/>
<figcaption class="mt-2 text-center text-sm text-gray-500">generated image</figcaption>
</div>
</div>
## Inpainting
For inpainting, you need an initial image, a mask image, and a prompt describing what to replace the mask with. ControlNet models allow you to add another control image to condition a model with. Let’s condition the model with an inpainting mask. This way, the ControlNet can use the inpainting mask as a control to guide the model to generate an image within the mask area.
Load an initial image and a mask image:
```py
from diffusers.utils import load_image, make_image_grid
init_image = load_image(
"https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/controlnet-inpaint.jpg"
)
init_image = init_image.resize((512, 512))
mask_image = load_image(
"https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/controlnet-inpaint-mask.jpg"
)
mask_image = mask_image.resize((512, 512))
make_image_grid([init_image, mask_image], rows=1, cols=2)
```
Create a function to prepare the control image from the initial and mask images. This'll create a tensor to mark the pixels in `init_image` as masked if the corresponding pixel in `mask_image` is over a certain threshold.
```py
import numpy as np
import torch
def make_inpaint_condition(image, image_mask):
image = np.array(image.convert("RGB")).astype(np.float32) / 255.0
image_mask = np.array(image_mask.convert("L")).astype(np.float32) / 255.0
assert image.shape[0:1] == image_mask.shape[0:1]
image[image_mask > 0.5] = -1.0 # set as masked pixel
image = np.expand_dims(image, 0).transpose(0, 3, 1, 2)
image = torch.from_numpy(image)
return image
control_image = make_inpaint_condition(init_image, mask_image)
```
<div class="flex gap-4">
<div>
<img class="rounded-xl" src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/controlnet-inpaint.jpg"/>
<figcaption class="mt-2 text-center text-sm text-gray-500">original image</figcaption>
</div>
<div>
<img class="rounded-xl" src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/controlnet-inpaint-mask.jpg"/>
<figcaption class="mt-2 text-center text-sm text-gray-500">mask image</figcaption>
</div>
</div>
Load a ControlNet model conditioned on inpainting and pass it to the [`StableDiffusionControlNetInpaintPipeline`]. Use the faster [`UniPCMultistepScheduler`] and enable model offloading to speed up inference and reduce memory usage.
```py
from diffusers import StableDiffusionControlNetInpaintPipeline, ControlNetModel, UniPCMultistepScheduler
controlnet = ControlNetModel.from_pretrained("lllyasviel/control_v11p_sd15_inpaint", torch_dtype=torch.float16, use_safetensors=True)
pipe = StableDiffusionControlNetInpaintPipeline.from_pretrained(
"runwayml/stable-diffusion-v1-5", controlnet=controlnet, torch_dtype=torch.float16, use_safetensors=True
)
pipe.scheduler = UniPCMultistepScheduler.from_config(pipe.scheduler.config)
pipe.enable_model_cpu_offload()
```
Now pass your prompt, initial image, mask image, and control image to the pipeline:
```py
output = pipe(
"corgi face with large ears, detailed, pixar, animated, disney",
num_inference_steps=20,
eta=1.0,
image=init_image,
mask_image=mask_image,
control_image=control_image,
).images[0]
make_image_grid([init_image, mask_image, output], rows=1, cols=3)
```
<div class="flex justify-center">
<img src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/controlnet-inpaint-result.png"/>
</div>
## Guess mode
[Guess mode](https://github.com/lllyasviel/ControlNet/discussions/188) does not require supplying a prompt to a ControlNet at all! This forces the ControlNet encoder to do it's best to "guess" the contents of the input control map (depth map, pose estimation, canny edge, etc.).
Guess mode adjusts the scale of the output residuals from a ControlNet by a fixed ratio depending on the block depth. The shallowest `DownBlock` corresponds to 0.1, and as the blocks get deeper, the scale increases exponentially such that the scale of the `MidBlock` output becomes 1.0.
<Tip>
Guess mode does not have any impact on prompt conditioning and you can still provide a prompt if you want.
</Tip>
Set `guess_mode=True` in the pipeline, and it is [recommended](https://github.com/lllyasviel/ControlNet#guess-mode--non-prompt-mode) to set the `guidance_scale` value between 3.0 and 5.0.
```py
from diffusers import StableDiffusionControlNetPipeline, ControlNetModel
from diffusers.utils import load_image, make_image_grid
import numpy as np
import torch
from PIL import Image
import cv2
controlnet = ControlNetModel.from_pretrained("lllyasviel/sd-controlnet-canny", use_safetensors=True)
pipe = StableDiffusionControlNetPipeline.from_pretrained("runwayml/stable-diffusion-v1-5", controlnet=controlnet, use_safetensors=True).to("cuda")
original_image = load_image("https://huggingface.co/takuma104/controlnet_dev/resolve/main/bird_512x512.png")
image = np.array(original_image)
low_threshold = 100
high_threshold = 200
image = cv2.Canny(image, low_threshold, high_threshold)
image = image[:, :, None]
image = np.concatenate([image, image, image], axis=2)
canny_image = Image.fromarray(image)
image = pipe("", image=canny_image, guess_mode=True, guidance_scale=3.0).images[0]
make_image_grid([original_image, canny_image, image], rows=1, cols=3)
```
<div class="flex gap-4">
<div>
<img class="rounded-xl" src="https://huggingface.co/takuma104/controlnet_dev/resolve/main/gen_compare_guess_mode/output_images/diffusers/output_bird_canny_0.png"/>
<figcaption class="mt-2 text-center text-sm text-gray-500">regular mode with prompt</figcaption>
</div>
<div>
<img class="rounded-xl" src="https://huggingface.co/takuma104/controlnet_dev/resolve/main/gen_compare_guess_mode/output_images/diffusers/output_bird_canny_0_gm.png"/>
<figcaption class="mt-2 text-center text-sm text-gray-500">guess mode without prompt</figcaption>
</div>
</div>
## ControlNet with Stable Diffusion XL
There aren't too many ControlNet models compatible with Stable Diffusion XL (SDXL) at the moment, but we've trained two full-sized ControlNet models for SDXL conditioned on canny edge detection and depth maps. We're also experimenting with creating smaller versions of these SDXL-compatible ControlNet models so it is easier to run on resource-constrained hardware. You can find these checkpoints on the [🤗 Diffusers Hub organization](https://huggingface.co/diffusers)!
Let's use a SDXL ControlNet conditioned on canny images to generate an image. Start by loading an image and prepare the canny image:
```py
from diffusers import StableDiffusionXLControlNetPipeline, ControlNetModel, AutoencoderKL
from diffusers.utils import load_image, make_image_grid
from PIL import Image
import cv2
import numpy as np
import torch
original_image = load_image(
"https://huggingface.co/datasets/hf-internal-testing/diffusers-images/resolve/main/sd_controlnet/hf-logo.png"
)
image = np.array(original_image)
low_threshold = 100
high_threshold = 200
image = cv2.Canny(image, low_threshold, high_threshold)
image = image[:, :, None]
image = np.concatenate([image, image, image], axis=2)
canny_image = Image.fromarray(image)
make_image_grid([original_image, canny_image], rows=1, cols=2)
```
<div class="flex gap-4">
<div>
<img class="rounded-xl" src="https://huggingface.co/datasets/hf-internal-testing/diffusers-images/resolve/main/sd_controlnet/hf-logo.png"/>
<figcaption class="mt-2 text-center text-sm text-gray-500">original image</figcaption>
</div>
<div>
<img class="rounded-xl" src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/hf-logo-canny.png"/>
<figcaption class="mt-2 text-center text-sm text-gray-500">canny image</figcaption>
</div>
</div>
Load a SDXL ControlNet model conditioned on canny edge detection and pass it to the [`StableDiffusionXLControlNetPipeline`]. You can also enable model offloading to reduce memory usage.
```py
controlnet = ControlNetModel.from_pretrained(
"diffusers/controlnet-canny-sdxl-1.0",
torch_dtype=torch.float16,
use_safetensors=True
)
vae = AutoencoderKL.from_pretrained("madebyollin/sdxl-vae-fp16-fix", torch_dtype=torch.float16, use_safetensors=True)
pipe = StableDiffusionXLControlNetPipeline.from_pretrained(
"stabilityai/stable-diffusion-xl-base-1.0",
controlnet=controlnet,
vae=vae,
torch_dtype=torch.float16,
use_safetensors=True
)
pipe.enable_model_cpu_offload()
```
Now pass your prompt (and optionally a negative prompt if you're using one) and canny image to the pipeline:
<Tip>
The [`controlnet_conditioning_scale`](https://huggingface.co/docs/diffusers/main/en/api/pipelines/controlnet#diffusers.StableDiffusionControlNetPipeline.__call__.controlnet_conditioning_scale) parameter determines how much weight to assign to the conditioning inputs. A value of 0.5 is recommended for good generalization, but feel free to experiment with this number!
</Tip>
```py
prompt = "aerial view, a futuristic research complex in a bright foggy jungle, hard lighting"
negative_prompt = 'low quality, bad quality, sketches'
image = pipe(
prompt,
negative_prompt=negative_prompt,
image=canny_image,
controlnet_conditioning_scale=0.5,
).images[0]
make_image_grid([original_image, canny_image, image], rows=1, cols=3)
```
<div class="flex justify-center">
<img class="rounded-xl" src="https://huggingface.co/diffusers/controlnet-canny-sdxl-1.0/resolve/main/out_hug_lab_7.png"/>
</div>
You can use [`StableDiffusionXLControlNetPipeline`] in guess mode as well by setting the parameter to `True`:
```py
from diffusers import StableDiffusionXLControlNetPipeline, ControlNetModel, AutoencoderKL
from diffusers.utils import load_image, make_image_grid
import numpy as np
import torch
import cv2
from PIL import Image
prompt = "aerial view, a futuristic research complex in a bright foggy jungle, hard lighting"
negative_prompt = "low quality, bad quality, sketches"
original_image = load_image(
"https://hf.co/datasets/hf-internal-testing/diffusers-images/resolve/main/sd_controlnet/hf-logo.png"
)
controlnet = ControlNetModel.from_pretrained(
"diffusers/controlnet-canny-sdxl-1.0", torch_dtype=torch.float16, use_safetensors=True
)
vae = AutoencoderKL.from_pretrained("madebyollin/sdxl-vae-fp16-fix", torch_dtype=torch.float16, use_safetensors=True)
pipe = StableDiffusionXLControlNetPipeline.from_pretrained(
"stabilityai/stable-diffusion-xl-base-1.0", controlnet=controlnet, vae=vae, torch_dtype=torch.float16, use_safetensors=True
)
pipe.enable_model_cpu_offload()
image = np.array(original_image)
image = cv2.Canny(image, 100, 200)
image = image[:, :, None]
image = np.concatenate([image, image, image], axis=2)
canny_image = Image.fromarray(image)
image = pipe(
prompt, negative_prompt=negative_prompt, controlnet_conditioning_scale=0.5, image=canny_image, guess_mode=True,
).images[0]
make_image_grid([original_image, canny_image, image], rows=1, cols=3)
```
## MultiControlNet
<Tip>
Replace the SDXL model with a model like [runwayml/stable-diffusion-v1-5](https://huggingface.co/runwayml/stable-diffusion-v1-5) to use multiple conditioning inputs with Stable Diffusion models.
</Tip>
You can compose multiple ControlNet conditionings from different image inputs to create a *MultiControlNet*. To get better results, it is often helpful to:
1. mask conditionings such that they don't overlap (for example, mask the area of a canny image where the pose conditioning is located)
2. experiment with the [`controlnet_conditioning_scale`](https://huggingface.co/docs/diffusers/main/en/api/pipelines/controlnet#diffusers.StableDiffusionControlNetPipeline.__call__.controlnet_conditioning_scale) parameter to determine how much weight to assign to each conditioning input
In this example, you'll combine a canny image and a human pose estimation image to generate a new image.
Prepare the canny image conditioning:
```py
from diffusers.utils import load_image, make_image_grid
from PIL import Image
import numpy as np
import cv2
original_image = load_image(
"https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/landscape.png"
)
image = np.array(original_image)
low_threshold = 100
high_threshold = 200
image = cv2.Canny(image, low_threshold, high_threshold)
# zero out middle columns of image where pose will be overlaid
zero_start = image.shape[1] // 4
zero_end = zero_start + image.shape[1] // 2
image[:, zero_start:zero_end] = 0
image = image[:, :, None]
image = np.concatenate([image, image, image], axis=2)
canny_image = Image.fromarray(image)
make_image_grid([original_image, canny_image], rows=1, cols=2)
```
<div class="flex gap-4">
<div>
<img class="rounded-xl" src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/landscape.png"/>
<figcaption class="mt-2 text-center text-sm text-gray-500">original image</figcaption>
</div>
<div>
<img class="rounded-xl" src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/blog/controlnet/landscape_canny_masked.png"/>
<figcaption class="mt-2 text-center text-sm text-gray-500">canny image</figcaption>
</div>
</div>
For human pose estimation, install [controlnet_aux](https://github.com/patrickvonplaten/controlnet_aux):
```py
# uncomment to install the necessary library in Colab
#!pip install -q controlnet-aux
```
Prepare the human pose estimation conditioning:
```py
from controlnet_aux import OpenposeDetector
openpose = OpenposeDetector.from_pretrained("lllyasviel/ControlNet")
original_image = load_image(
"https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/person.png"
)
openpose_image = openpose(original_image)
make_image_grid([original_image, openpose_image], rows=1, cols=2)
```
<div class="flex gap-4">
<div>
<img class="rounded-xl" src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/person.png"/>
<figcaption class="mt-2 text-center text-sm text-gray-500">original image</figcaption>
</div>
<div>
<img class="rounded-xl" src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/blog/controlnet/person_pose.png"/>
<figcaption class="mt-2 text-center text-sm text-gray-500">human pose image</figcaption>
</div>
</div>
Load a list of ControlNet models that correspond to each conditioning, and pass them to the [`StableDiffusionXLControlNetPipeline`]. Use the faster [`UniPCMultistepScheduler`] and enable model offloading to reduce memory usage.
```py
from diffusers import StableDiffusionXLControlNetPipeline, ControlNetModel, AutoencoderKL, UniPCMultistepScheduler
import torch
controlnets = [
ControlNetModel.from_pretrained(
"thibaud/controlnet-openpose-sdxl-1.0", torch_dtype=torch.float16
),
ControlNetModel.from_pretrained(
"diffusers/controlnet-canny-sdxl-1.0", torch_dtype=torch.float16, use_safetensors=True
),
]
vae = AutoencoderKL.from_pretrained("madebyollin/sdxl-vae-fp16-fix", torch_dtype=torch.float16, use_safetensors=True)
pipe = StableDiffusionXLControlNetPipeline.from_pretrained(
"stabilityai/stable-diffusion-xl-base-1.0", controlnet=controlnets, vae=vae, torch_dtype=torch.float16, use_safetensors=True
)
pipe.scheduler = UniPCMultistepScheduler.from_config(pipe.scheduler.config)
pipe.enable_model_cpu_offload()
```
Now you can pass your prompt (an optional negative prompt if you're using one), canny image, and pose image to the pipeline:
```py
prompt = "a giant standing in a fantasy landscape, best quality"
negative_prompt = "monochrome, lowres, bad anatomy, worst quality, low quality"
generator = torch.manual_seed(1)
images = [openpose_image.resize((1024, 1024)), canny_image.resize((1024, 1024))]
images = pipe(
prompt,
image=images,
num_inference_steps=25,
generator=generator,
negative_prompt=negative_prompt,
num_images_per_prompt=3,
controlnet_conditioning_scale=[1.0, 0.8],
).images
make_image_grid([original_image, canny_image, openpose_image,
images[0].resize((512, 512)), images[1].resize((512, 512)), images[2].resize((512, 512))], rows=2, cols=3)
```
<div class="flex justify-center">
<img class="rounded-xl" src="https://huggingface.co/datasets/huggingface/documentation-images/resolve/main/diffusers/multicontrolnet.png"/>
</div>
| diffusers/docs/source/en/using-diffusers/controlnet.md/0 | {
"file_path": "diffusers/docs/source/en/using-diffusers/controlnet.md",
"repo_id": "diffusers",
"token_count": 8406
} | 83 |
<!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# Using Diffusers with other modalities
Diffusers is in the process of expanding to modalities other than images.
Example type | Colab | Pipeline |
:-------------------------:|:-------------------------:|:-------------------------:|
[Molecule conformation](https://www.nature.com/subjects/molecular-conformation#:~:text=Definition,to%20changes%20in%20their%20environment.) generation | [](https://colab.research.google.com/github/huggingface/notebooks/blob/main/diffusers/geodiff_molecule_conformation.ipynb) | ❌
More coming soon! | diffusers/docs/source/en/using-diffusers/other-modalities.md/0 | {
"file_path": "diffusers/docs/source/en/using-diffusers/other-modalities.md",
"repo_id": "diffusers",
"token_count": 334
} | 84 |
- sections:
- local: index
title: 🧨 Diffusers
- local: quicktour
title: クイックツアー
- local: stable_diffusion
title: 有効で効率の良い拡散モデル
- local: installation
title: インストール
title: はじめに
- sections:
- local: tutorials/tutorial_overview
title: 概要
- local: tutorials/autopipeline
title: AutoPipeline
title: チュートリアル | diffusers/docs/source/ja/_toctree.yml/0 | {
"file_path": "diffusers/docs/source/ja/_toctree.yml",
"repo_id": "diffusers",
"token_count": 166
} | 85 |
<!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# 추론을 위해 ONNX 런타임을 사용하는 방법
🤗 Diffusers는 ONNX Runtime과 호환되는 Stable Diffusion 파이프라인을 제공합니다. 이를 통해 ONNX(CPU 포함)를 지원하고 PyTorch의 가속 버전을 사용할 수 없는 모든 하드웨어에서 Stable Diffusion을 실행할 수 있습니다.
## 설치
다음 명령어로 ONNX Runtime를 지원하는 🤗 Optimum를 설치합니다:
```
pip install optimum["onnxruntime"]
```
## Stable Diffusion 추론
아래 코드는 ONNX 런타임을 사용하는 방법을 보여줍니다. `StableDiffusionPipeline` 대신 `OnnxStableDiffusionPipeline`을 사용해야 합니다.
PyTorch 모델을 불러오고 즉시 ONNX 형식으로 변환하려는 경우 `export=True`로 설정합니다.
```python
from optimum.onnxruntime import ORTStableDiffusionPipeline
model_id = "runwayml/stable-diffusion-v1-5"
pipe = ORTStableDiffusionPipeline.from_pretrained(model_id, export=True)
prompt = "a photo of an astronaut riding a horse on mars"
images = pipe(prompt).images[0]
pipe.save_pretrained("./onnx-stable-diffusion-v1-5")
```
파이프라인을 ONNX 형식으로 오프라인으로 내보내고 나중에 추론에 사용하려는 경우,
[`optimum-cli export`](https://huggingface.co/docs/optimum/main/en/exporters/onnx/usage_guides/export_a_model#exporting-a-model-to-onnx-using-the-cli) 명령어를 사용할 수 있습니다:
```bash
optimum-cli export onnx --model runwayml/stable-diffusion-v1-5 sd_v15_onnx/
```
그 다음 추론을 수행합니다:
```python
from optimum.onnxruntime import ORTStableDiffusionPipeline
model_id = "sd_v15_onnx"
pipe = ORTStableDiffusionPipeline.from_pretrained(model_id)
prompt = "a photo of an astronaut riding a horse on mars"
images = pipe(prompt).images[0]
```
Notice that we didn't have to specify `export=True` above.
[Optimum 문서](https://huggingface.co/docs/optimum/)에서 더 많은 예시를 찾을 수 있습니다.
## 알려진 이슈들
- 여러 프롬프트를 배치로 생성하면 너무 많은 메모리가 사용되는 것 같습니다. 이를 조사하는 동안, 배치 대신 반복 방법이 필요할 수도 있습니다.
| diffusers/docs/source/ko/optimization/onnx.md/0 | {
"file_path": "diffusers/docs/source/ko/optimization/onnx.md",
"repo_id": "diffusers",
"token_count": 1438
} | 86 |
<!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# 🧨 Diffusers 학습 예시
이번 챕터에서는 다양한 유즈케이스들에 대한 예제 코드들을 통해 어떻게하면 효과적으로 `diffusers` 라이브러리를 사용할 수 있을까에 대해 알아보도록 하겠습니다.
**Note**: 혹시 오피셜한 예시코드를 찾고 있다면, [여기](https://github.com/huggingface/diffusers/tree/main/src/diffusers/pipelines)를 참고해보세요!
여기서 다룰 예시들은 다음을 지향합니다.
- **손쉬운 디펜던시 설치** (Self-contained) : 여기서 사용될 예시 코드들의 디펜던시 패키지들은 전부 `pip install` 명령어를 통해 설치 가능한 패키지들입니다. 또한 친절하게 `requirements.txt` 파일에 해당 패키지들이 명시되어 있어, `pip install -r requirements.txt`로 간편하게 해당 디펜던시들을 설치할 수 있습니다. 예시: [train_unconditional.py](https://github.com/huggingface/diffusers/blob/main/examples/unconditional_image_generation/train_unconditional.py), [requirements.txt](https://github.com/huggingface/diffusers/blob/main/examples/unconditional_image_generation/requirements.txt)
- **손쉬운 수정** (Easy-to-tweak) : 저희는 가능하면 많은 유즈 케이스들을 제공하고자 합니다. 하지만 예시는 결국 그저 예시라는 점들 기억해주세요. 여기서 제공되는 예시코드들을 그저 단순히 복사-붙혀넣기하는 식으로는 여러분이 마주한 문제들을 손쉽게 해결할 순 없을 것입니다. 다시 말해 어느 정도는 여러분의 상황과 니즈에 맞춰 코드를 일정 부분 고쳐나가야 할 것입니다. 따라서 대부분의 학습 예시들은 데이터의 전처리 과정과 학습 과정에 대한 코드들을 함께 제공함으로써, 사용자가 니즈에 맞게 손쉬운 수정할 수 있도록 돕고 있습니다.
- **입문자 친화적인** (Beginner-friendly) : 이번 챕터는 diffusion 모델과 `diffusers` 라이브러리에 대한 전반적인 이해를 돕기 위해 작성되었습니다. 따라서 diffusion 모델에 대한 최신 SOTA (state-of-the-art) 방법론들 가운데서도, 입문자에게는 많이 어려울 수 있다고 판단되면, 해당 방법론들은 여기서 다루지 않으려고 합니다.
- **하나의 태스크만 포함할 것**(One-purpose-only): 여기서 다룰 예시들은 하나의 태스크만 포함하고 있어야 합니다. 물론 이미지 초해상화(super-resolution)와 이미지 보정(modification)과 같은 유사한 모델링 프로세스를 갖는 태스크들이 존재하겠지만, 하나의 예제에 하나의 태스크만을 담는 것이 더 이해하기 용이하다고 판단했기 때문입니다.
저희는 diffusion 모델의 대표적인 태스크들을 다루는 공식 예제를 제공하고 있습니다. *공식* 예제는 현재 진행형으로 `diffusers` 관리자들(maintainers)에 의해 관리되고 있습니다. 또한 저희는 앞서 정의한 저희의 철학을 엄격하게 따르고자 노력하고 있습니다. 혹시 여러분께서 이러한 예시가 반드시 필요하다고 생각되신다면, 언제든지 [Feature Request](https://github.com/huggingface/diffusers/issues/new?assignees=&labels=&template=feature_request.md&title=) 혹은 직접 [Pull Request](https://github.com/huggingface/diffusers/compare)를 주시기 바랍니다. 저희는 언제나 환영입니다!
학습 예시들은 다양한 태스크들에 대해 diffusion 모델을 사전학습(pretrain)하거나 파인튜닝(fine-tuning)하는 법을 보여줍니다. 현재 다음과 같은 예제들을 지원하고 있습니다.
- [Unconditional Training](./unconditional_training)
- [Text-to-Image Training](./text2image)
- [Text Inversion](./text_inversion)
- [Dreambooth](./dreambooth)
memory-efficient attention 연산을 수행하기 위해, 가능하면 [xFormers](../optimization/xformers)를 설치해주시기 바랍니다. 이를 통해 학습 속도를 늘리고 메모리에 대한 부담을 줄일 수 있습니다.
| Task | 🤗 Accelerate | 🤗 Datasets | Colab
|---|---|:---:|:---:|
| [**Unconditional Image Generation**](./unconditional_training) | ✅ | ✅ | [](https://colab.research.google.com/github/huggingface/notebooks/blob/main/diffusers/training_example.ipynb)
| [**Text-to-Image fine-tuning**](./text2image) | ✅ | ✅ |
| [**Textual Inversion**](./text_inversion) | ✅ | - | [](https://colab.research.google.com/github/huggingface/notebooks/blob/main/diffusers/sd_textual_inversion_training.ipynb)
| [**Dreambooth**](./dreambooth) | ✅ | - | [](https://colab.research.google.com/github/huggingface/notebooks/blob/main/diffusers/sd_dreambooth_training.ipynb)
| [**Training with LoRA**](./lora) | ✅ | - | - |
| [**ControlNet**](./controlnet) | ✅ | ✅ | - |
| [**InstructPix2Pix**](./instructpix2pix) | ✅ | ✅ | - |
| [**Custom Diffusion**](./custom_diffusion) | ✅ | ✅ | - |
## 커뮤니티
공식 예제 외에도 **커뮤니티 예제** 역시 제공하고 있습니다. 해당 예제들은 우리의 커뮤니티에 의해 관리됩니다. 커뮤니티 예쩨는 학습 예시나 추론 파이프라인으로 구성될 수 있습니다. 이러한 커뮤니티 예시들의 경우, 앞서 정의했던 철학들을 좀 더 관대하게 적용하고 있습니다. 또한 이러한 커뮤니티 예시들의 경우, 모든 이슈들에 대한 유지보수를 보장할 수는 없습니다.
유용하긴 하지만, 아직은 대중적이지 못하거나 저희의 철학에 부합하지 않는 예제들은 [community examples](https://github.com/huggingface/diffusers/tree/main/examples/community) 폴더에 담기게 됩니다.
**Note**: 커뮤니티 예제는 `diffusers`에 기여(contribution)를 희망하는 분들에게 [아주 좋은 기여 수단](https://github.com/huggingface/diffusers/issues?q=is%3Aopen+is%3Aissue+label%3A%22good+first+issue%22)이 될 수 있습니다.
## 주목할 사항들
최신 버전의 예시 코드들의 성공적인 구동을 보장하기 위해서는, 반드시 **소스코드를 통해 `diffusers`를 설치해야 하며,** 해당 예시 코드들이 요구하는 디펜던시들 역시 설치해야 합니다. 이를 위해 새로운 가상 환경을 구축하고 다음의 명령어를 실행해야 합니다.
```bash
git clone https://github.com/huggingface/diffusers
cd diffusers
pip install .
```
그 다음 `cd` 명령어를 통해 해당 예제 디렉토리에 접근해서 다음 명령어를 실행하면 됩니다.
```bash
pip install -r requirements.txt
``` | diffusers/docs/source/ko/training/overview.md/0 | {
"file_path": "diffusers/docs/source/ko/training/overview.md",
"repo_id": "diffusers",
"token_count": 4745
} | 87 |
<!--Copyright 2023 The HuggingFace Team. All rights reserved.
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with
the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on
an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the
specific language governing permissions and limitations under the License.
-->
# Overview
🧨 Diffusers는 생성 작업을 위한 다양한 파이프라인, 모델, 스케줄러를 제공합니다. 이러한 컴포넌트를 최대한 간단하게 로드할 수 있도록 단일 통합 메서드인 `from_pretrained()`를 제공하여 Hugging Face [Hub](https://huggingface.co/models?library=diffusers&sort=downloads) 또는 로컬 머신에서 이러한 컴포넌트를 불러올 수 있습니다. 파이프라인이나 모델을 로드할 때마다, 최신 파일이 자동으로 다운로드되고 캐시되므로, 다음에 파일을 다시 다운로드하지 않고도 빠르게 재사용할 수 있습니다.
이 섹션은 파이프라인 로딩, 파이프라인에서 다양한 컴포넌트를 로드하는 방법, 체크포인트 variants를 불러오는 방법, 그리고 커뮤니티 파이프라인을 불러오는 방법에 대해 알아야 할 모든 것들을 다룹니다. 또한 스케줄러를 불러오는 방법과 서로 다른 스케줄러를 사용할 때 발생하는 속도와 품질간의 트레이드 오프를 비교하는 방법 역시 다룹니다. 그리고 마지막으로 🧨 Diffusers와 함께 파이토치에서 사용할 수 있도록 KerasCV 체크포인트를 변환하고 불러오는 방법을 살펴봅니다.
| diffusers/docs/source/ko/using-diffusers/loading_overview.md/0 | {
"file_path": "diffusers/docs/source/ko/using-diffusers/loading_overview.md",
"repo_id": "diffusers",
"token_count": 1158
} | 88 |
- sections:
- local: index
title: 🧨 Diffusers
- local: quicktour
title: 快速入门
- local: stable_diffusion
title: 有效和高效的扩散
- local: installation
title: 安装
title: 开始
| diffusers/docs/source/zh/_toctree.yml/0 | {
"file_path": "diffusers/docs/source/zh/_toctree.yml",
"repo_id": "diffusers",
"token_count": 100
} | 89 |
# Copyright 2023 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import inspect
from typing import Callable, List, Optional, Union
import torch
from packaging import version
from transformers import CLIPImageProcessor, CLIPTextModel, CLIPTokenizer
from diffusers import DiffusionPipeline
from diffusers.configuration_utils import FrozenDict
from diffusers.models import AutoencoderKL, UNet2DConditionModel
from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion import StableDiffusionPipelineOutput
from diffusers.pipelines.stable_diffusion.safety_checker import StableDiffusionSafetyChecker
from diffusers.schedulers import (
DDIMScheduler,
DPMSolverMultistepScheduler,
EulerAncestralDiscreteScheduler,
EulerDiscreteScheduler,
LMSDiscreteScheduler,
PNDMScheduler,
)
from diffusers.utils import deprecate, is_accelerate_available, logging
logger = logging.get_logger(__name__) # pylint: disable=invalid-name
class ComposableStableDiffusionPipeline(DiffusionPipeline):
r"""
Pipeline for text-to-image generation using Stable Diffusion.
This model inherits from [`DiffusionPipeline`]. Check the superclass documentation for the generic methods the
library implements for all the pipelines (such as downloading or saving, running on a particular device, etc.)
Args:
vae ([`AutoencoderKL`]):
Variational Auto-Encoder (VAE) Model to encode and decode images to and from latent representations.
text_encoder ([`CLIPTextModel`]):
Frozen text-encoder. Stable Diffusion uses the text portion of
[CLIP](https://huggingface.co/docs/transformers/model_doc/clip#transformers.CLIPTextModel), specifically
the [clip-vit-large-patch14](https://huggingface.co/openai/clip-vit-large-patch14) variant.
tokenizer (`CLIPTokenizer`):
Tokenizer of class
[CLIPTokenizer](https://huggingface.co/docs/transformers/v4.21.0/en/model_doc/clip#transformers.CLIPTokenizer).
unet ([`UNet2DConditionModel`]): Conditional U-Net architecture to denoise the encoded image latents.
scheduler ([`SchedulerMixin`]):
A scheduler to be used in combination with `unet` to denoise the encoded image latents. Can be one of
[`DDIMScheduler`], [`LMSDiscreteScheduler`], or [`PNDMScheduler`].
safety_checker ([`StableDiffusionSafetyChecker`]):
Classification module that estimates whether generated images could be considered offensive or harmful.
Please, refer to the [model card](https://huggingface.co/runwayml/stable-diffusion-v1-5) for details.
feature_extractor ([`CLIPImageProcessor`]):
Model that extracts features from generated images to be used as inputs for the `safety_checker`.
"""
_optional_components = ["safety_checker", "feature_extractor"]
def __init__(
self,
vae: AutoencoderKL,
text_encoder: CLIPTextModel,
tokenizer: CLIPTokenizer,
unet: UNet2DConditionModel,
scheduler: Union[
DDIMScheduler,
PNDMScheduler,
LMSDiscreteScheduler,
EulerDiscreteScheduler,
EulerAncestralDiscreteScheduler,
DPMSolverMultistepScheduler,
],
safety_checker: StableDiffusionSafetyChecker,
feature_extractor: CLIPImageProcessor,
requires_safety_checker: bool = True,
):
super().__init__()
if hasattr(scheduler.config, "steps_offset") and scheduler.config.steps_offset != 1:
deprecation_message = (
f"The configuration file of this scheduler: {scheduler} is outdated. `steps_offset`"
f" should be set to 1 instead of {scheduler.config.steps_offset}. Please make sure "
"to update the config accordingly as leaving `steps_offset` might led to incorrect results"
" in future versions. If you have downloaded this checkpoint from the Hugging Face Hub,"
" it would be very nice if you could open a Pull request for the `scheduler/scheduler_config.json`"
" file"
)
deprecate("steps_offset!=1", "1.0.0", deprecation_message, standard_warn=False)
new_config = dict(scheduler.config)
new_config["steps_offset"] = 1
scheduler._internal_dict = FrozenDict(new_config)
if hasattr(scheduler.config, "clip_sample") and scheduler.config.clip_sample is True:
deprecation_message = (
f"The configuration file of this scheduler: {scheduler} has not set the configuration `clip_sample`."
" `clip_sample` should be set to False in the configuration file. Please make sure to update the"
" config accordingly as not setting `clip_sample` in the config might lead to incorrect results in"
" future versions. If you have downloaded this checkpoint from the Hugging Face Hub, it would be very"
" nice if you could open a Pull request for the `scheduler/scheduler_config.json` file"
)
deprecate("clip_sample not set", "1.0.0", deprecation_message, standard_warn=False)
new_config = dict(scheduler.config)
new_config["clip_sample"] = False
scheduler._internal_dict = FrozenDict(new_config)
if safety_checker is None and requires_safety_checker:
logger.warning(
f"You have disabled the safety checker for {self.__class__} by passing `safety_checker=None`. Ensure"
" that you abide to the conditions of the Stable Diffusion license and do not expose unfiltered"
" results in services or applications open to the public. Both the diffusers team and Hugging Face"
" strongly recommend to keep the safety filter enabled in all public facing circumstances, disabling"
" it only for use-cases that involve analyzing network behavior or auditing its results. For more"
" information, please have a look at https://github.com/huggingface/diffusers/pull/254 ."
)
if safety_checker is not None and feature_extractor is None:
raise ValueError(
"Make sure to define a feature extractor when loading {self.__class__} if you want to use the safety"
" checker. If you do not want to use the safety checker, you can pass `'safety_checker=None'` instead."
)
is_unet_version_less_0_9_0 = hasattr(unet.config, "_diffusers_version") and version.parse(
version.parse(unet.config._diffusers_version).base_version
) < version.parse("0.9.0.dev0")
is_unet_sample_size_less_64 = hasattr(unet.config, "sample_size") and unet.config.sample_size < 64
if is_unet_version_less_0_9_0 and is_unet_sample_size_less_64:
deprecation_message = (
"The configuration file of the unet has set the default `sample_size` to smaller than"
" 64 which seems highly unlikely. If your checkpoint is a fine-tuned version of any of the"
" following: \n- CompVis/stable-diffusion-v1-4 \n- CompVis/stable-diffusion-v1-3 \n-"
" CompVis/stable-diffusion-v1-2 \n- CompVis/stable-diffusion-v1-1 \n- runwayml/stable-diffusion-v1-5"
" \n- runwayml/stable-diffusion-inpainting \n you should change 'sample_size' to 64 in the"
" configuration file. Please make sure to update the config accordingly as leaving `sample_size=32`"
" in the config might lead to incorrect results in future versions. If you have downloaded this"
" checkpoint from the Hugging Face Hub, it would be very nice if you could open a Pull request for"
" the `unet/config.json` file"
)
deprecate("sample_size<64", "1.0.0", deprecation_message, standard_warn=False)
new_config = dict(unet.config)
new_config["sample_size"] = 64
unet._internal_dict = FrozenDict(new_config)
self.register_modules(
vae=vae,
text_encoder=text_encoder,
tokenizer=tokenizer,
unet=unet,
scheduler=scheduler,
safety_checker=safety_checker,
feature_extractor=feature_extractor,
)
self.vae_scale_factor = 2 ** (len(self.vae.config.block_out_channels) - 1)
self.register_to_config(requires_safety_checker=requires_safety_checker)
def enable_vae_slicing(self):
r"""
Enable sliced VAE decoding.
When this option is enabled, the VAE will split the input tensor in slices to compute decoding in several
steps. This is useful to save some memory and allow larger batch sizes.
"""
self.vae.enable_slicing()
def disable_vae_slicing(self):
r"""
Disable sliced VAE decoding. If `enable_vae_slicing` was previously invoked, this method will go back to
computing decoding in one step.
"""
self.vae.disable_slicing()
def enable_sequential_cpu_offload(self, gpu_id=0):
r"""
Offloads all models to CPU using accelerate, significantly reducing memory usage. When called, unet,
text_encoder, vae and safety checker have their state dicts saved to CPU and then are moved to a
`torch.device('meta') and loaded to GPU only when their specific submodule has its `forward` method called.
"""
if is_accelerate_available():
from accelerate import cpu_offload
else:
raise ImportError("Please install accelerate via `pip install accelerate`")
device = torch.device(f"cuda:{gpu_id}")
for cpu_offloaded_model in [self.unet, self.text_encoder, self.vae]:
if cpu_offloaded_model is not None:
cpu_offload(cpu_offloaded_model, device)
if self.safety_checker is not None:
# TODO(Patrick) - there is currently a bug with cpu offload of nn.Parameter in accelerate
# fix by only offloading self.safety_checker for now
cpu_offload(self.safety_checker.vision_model, device)
@property
def _execution_device(self):
r"""
Returns the device on which the pipeline's models will be executed. After calling
`pipeline.enable_sequential_cpu_offload()` the execution device can only be inferred from Accelerate's module
hooks.
"""
if self.device != torch.device("meta") or not hasattr(self.unet, "_hf_hook"):
return self.device
for module in self.unet.modules():
if (
hasattr(module, "_hf_hook")
and hasattr(module._hf_hook, "execution_device")
and module._hf_hook.execution_device is not None
):
return torch.device(module._hf_hook.execution_device)
return self.device
def _encode_prompt(self, prompt, device, num_images_per_prompt, do_classifier_free_guidance, negative_prompt):
r"""
Encodes the prompt into text encoder hidden states.
Args:
prompt (`str` or `list(int)`):
prompt to be encoded
device: (`torch.device`):
torch device
num_images_per_prompt (`int`):
number of images that should be generated per prompt
do_classifier_free_guidance (`bool`):
whether to use classifier free guidance or not
negative_prompt (`str` or `List[str]`):
The prompt or prompts not to guide the image generation. Ignored when not using guidance (i.e., ignored
if `guidance_scale` is less than `1`).
"""
batch_size = len(prompt) if isinstance(prompt, list) else 1
text_inputs = self.tokenizer(
prompt,
padding="max_length",
max_length=self.tokenizer.model_max_length,
truncation=True,
return_tensors="pt",
)
text_input_ids = text_inputs.input_ids
untruncated_ids = self.tokenizer(prompt, padding="longest", return_tensors="pt").input_ids
if untruncated_ids.shape[-1] >= text_input_ids.shape[-1] and not torch.equal(text_input_ids, untruncated_ids):
removed_text = self.tokenizer.batch_decode(untruncated_ids[:, self.tokenizer.model_max_length - 1 : -1])
logger.warning(
"The following part of your input was truncated because CLIP can only handle sequences up to"
f" {self.tokenizer.model_max_length} tokens: {removed_text}"
)
if hasattr(self.text_encoder.config, "use_attention_mask") and self.text_encoder.config.use_attention_mask:
attention_mask = text_inputs.attention_mask.to(device)
else:
attention_mask = None
text_embeddings = self.text_encoder(
text_input_ids.to(device),
attention_mask=attention_mask,
)
text_embeddings = text_embeddings[0]
# duplicate text embeddings for each generation per prompt, using mps friendly method
bs_embed, seq_len, _ = text_embeddings.shape
text_embeddings = text_embeddings.repeat(1, num_images_per_prompt, 1)
text_embeddings = text_embeddings.view(bs_embed * num_images_per_prompt, seq_len, -1)
# get unconditional embeddings for classifier free guidance
if do_classifier_free_guidance:
uncond_tokens: List[str]
if negative_prompt is None:
uncond_tokens = [""] * batch_size
elif type(prompt) is not type(negative_prompt):
raise TypeError(
f"`negative_prompt` should be the same type to `prompt`, but got {type(negative_prompt)} !="
f" {type(prompt)}."
)
elif isinstance(negative_prompt, str):
uncond_tokens = [negative_prompt]
elif batch_size != len(negative_prompt):
raise ValueError(
f"`negative_prompt`: {negative_prompt} has batch size {len(negative_prompt)}, but `prompt`:"
f" {prompt} has batch size {batch_size}. Please make sure that passed `negative_prompt` matches"
" the batch size of `prompt`."
)
else:
uncond_tokens = negative_prompt
max_length = text_input_ids.shape[-1]
uncond_input = self.tokenizer(
uncond_tokens,
padding="max_length",
max_length=max_length,
truncation=True,
return_tensors="pt",
)
if hasattr(self.text_encoder.config, "use_attention_mask") and self.text_encoder.config.use_attention_mask:
attention_mask = uncond_input.attention_mask.to(device)
else:
attention_mask = None
uncond_embeddings = self.text_encoder(
uncond_input.input_ids.to(device),
attention_mask=attention_mask,
)
uncond_embeddings = uncond_embeddings[0]
# duplicate unconditional embeddings for each generation per prompt, using mps friendly method
seq_len = uncond_embeddings.shape[1]
uncond_embeddings = uncond_embeddings.repeat(1, num_images_per_prompt, 1)
uncond_embeddings = uncond_embeddings.view(batch_size * num_images_per_prompt, seq_len, -1)
# For classifier free guidance, we need to do two forward passes.
# Here we concatenate the unconditional and text embeddings into a single batch
# to avoid doing two forward passes
text_embeddings = torch.cat([uncond_embeddings, text_embeddings])
return text_embeddings
def run_safety_checker(self, image, device, dtype):
if self.safety_checker is not None:
safety_checker_input = self.feature_extractor(self.numpy_to_pil(image), return_tensors="pt").to(device)
image, has_nsfw_concept = self.safety_checker(
images=image, clip_input=safety_checker_input.pixel_values.to(dtype)
)
else:
has_nsfw_concept = None
return image, has_nsfw_concept
def decode_latents(self, latents):
latents = 1 / 0.18215 * latents
image = self.vae.decode(latents).sample
image = (image / 2 + 0.5).clamp(0, 1)
# we always cast to float32 as this does not cause significant overhead and is compatible with bfloat16
image = image.cpu().permute(0, 2, 3, 1).float().numpy()
return image
def prepare_extra_step_kwargs(self, generator, eta):
# prepare extra kwargs for the scheduler step, since not all schedulers have the same signature
# eta (η) is only used with the DDIMScheduler, it will be ignored for other schedulers.
# eta corresponds to η in DDIM paper: https://arxiv.org/abs/2010.02502
# and should be between [0, 1]
accepts_eta = "eta" in set(inspect.signature(self.scheduler.step).parameters.keys())
extra_step_kwargs = {}
if accepts_eta:
extra_step_kwargs["eta"] = eta
# check if the scheduler accepts generator
accepts_generator = "generator" in set(inspect.signature(self.scheduler.step).parameters.keys())
if accepts_generator:
extra_step_kwargs["generator"] = generator
return extra_step_kwargs
def check_inputs(self, prompt, height, width, callback_steps):
if not isinstance(prompt, str) and not isinstance(prompt, list):
raise ValueError(f"`prompt` has to be of type `str` or `list` but is {type(prompt)}")
if height % 8 != 0 or width % 8 != 0:
raise ValueError(f"`height` and `width` have to be divisible by 8 but are {height} and {width}.")
if (callback_steps is None) or (
callback_steps is not None and (not isinstance(callback_steps, int) or callback_steps <= 0)
):
raise ValueError(
f"`callback_steps` has to be a positive integer but is {callback_steps} of type"
f" {type(callback_steps)}."
)
def prepare_latents(self, batch_size, num_channels_latents, height, width, dtype, device, generator, latents=None):
shape = (batch_size, num_channels_latents, height // self.vae_scale_factor, width // self.vae_scale_factor)
if latents is None:
if device.type == "mps":
# randn does not work reproducibly on mps
latents = torch.randn(shape, generator=generator, device="cpu", dtype=dtype).to(device)
else:
latents = torch.randn(shape, generator=generator, device=device, dtype=dtype)
else:
if latents.shape != shape:
raise ValueError(f"Unexpected latents shape, got {latents.shape}, expected {shape}")
latents = latents.to(device)
# scale the initial noise by the standard deviation required by the scheduler
latents = latents * self.scheduler.init_noise_sigma
return latents
@torch.no_grad()
def __call__(
self,
prompt: Union[str, List[str]],
height: Optional[int] = None,
width: Optional[int] = None,
num_inference_steps: int = 50,
guidance_scale: float = 7.5,
negative_prompt: Optional[Union[str, List[str]]] = None,
num_images_per_prompt: Optional[int] = 1,
eta: float = 0.0,
generator: Optional[torch.Generator] = None,
latents: Optional[torch.FloatTensor] = None,
output_type: Optional[str] = "pil",
return_dict: bool = True,
callback: Optional[Callable[[int, int, torch.FloatTensor], None]] = None,
callback_steps: int = 1,
weights: Optional[str] = "",
):
r"""
Function invoked when calling the pipeline for generation.
Args:
prompt (`str` or `List[str]`):
The prompt or prompts to guide the image generation.
height (`int`, *optional*, defaults to self.unet.config.sample_size * self.vae_scale_factor):
The height in pixels of the generated image.
width (`int`, *optional*, defaults to self.unet.config.sample_size * self.vae_scale_factor):
The width in pixels of the generated image.
num_inference_steps (`int`, *optional*, defaults to 50):
The number of denoising steps. More denoising steps usually lead to a higher quality image at the
expense of slower inference.
guidance_scale (`float`, *optional*, defaults to 5.0):
Guidance scale as defined in [Classifier-Free Diffusion Guidance](https://arxiv.org/abs/2207.12598).
`guidance_scale` is defined as `w` of equation 2. of [Imagen
Paper](https://arxiv.org/pdf/2205.11487.pdf). Guidance scale is enabled by setting `guidance_scale >
1`. Higher guidance scale encourages to generate images that are closely linked to the text `prompt`,
usually at the expense of lower image quality.
negative_prompt (`str` or `List[str]`, *optional*):
The prompt or prompts not to guide the image generation. Ignored when not using guidance (i.e., ignored
if `guidance_scale` is less than `1`).
num_images_per_prompt (`int`, *optional*, defaults to 1):
The number of images to generate per prompt.
eta (`float`, *optional*, defaults to 0.0):
Corresponds to parameter eta (η) in the DDIM paper: https://arxiv.org/abs/2010.02502. Only applies to
[`schedulers.DDIMScheduler`], will be ignored for others.
generator (`torch.Generator`, *optional*):
A [torch generator](https://pytorch.org/docs/stable/generated/torch.Generator.html) to make generation
deterministic.
latents (`torch.FloatTensor`, *optional*):
Pre-generated noisy latents, sampled from a Gaussian distribution, to be used as inputs for image
generation. Can be used to tweak the same generation with different prompts. If not provided, a latents
tensor will ge generated by sampling using the supplied random `generator`.
output_type (`str`, *optional*, defaults to `"pil"`):
The output format of the generate image. Choose between
[PIL](https://pillow.readthedocs.io/en/stable/): `PIL.Image.Image` or `np.array`.
return_dict (`bool`, *optional*, defaults to `True`):
Whether or not to return a [`~pipelines.stable_diffusion.StableDiffusionPipelineOutput`] instead of a
plain tuple.
callback (`Callable`, *optional*):
A function that will be called every `callback_steps` steps during inference. The function will be
called with the following arguments: `callback(step: int, timestep: int, latents: torch.FloatTensor)`.
callback_steps (`int`, *optional*, defaults to 1):
The frequency at which the `callback` function will be called. If not specified, the callback will be
called at every step.
Returns:
[`~pipelines.stable_diffusion.StableDiffusionPipelineOutput`] or `tuple`:
[`~pipelines.stable_diffusion.StableDiffusionPipelineOutput`] if `return_dict` is True, otherwise a `tuple.
When returning a tuple, the first element is a list with the generated images, and the second element is a
list of `bool`s denoting whether the corresponding generated image likely represents "not-safe-for-work"
(nsfw) content, according to the `safety_checker`.
"""
# 0. Default height and width to unet
height = height or self.unet.config.sample_size * self.vae_scale_factor
width = width or self.unet.config.sample_size * self.vae_scale_factor
# 1. Check inputs. Raise error if not correct
self.check_inputs(prompt, height, width, callback_steps)
# 2. Define call parameters
batch_size = 1 if isinstance(prompt, str) else len(prompt)
device = self._execution_device
# here `guidance_scale` is defined analog to the guidance weight `w` of equation (2)
# of the Imagen paper: https://arxiv.org/pdf/2205.11487.pdf . `guidance_scale = 1`
# corresponds to doing no classifier free guidance.
do_classifier_free_guidance = guidance_scale > 1.0
if "|" in prompt:
prompt = [x.strip() for x in prompt.split("|")]
print(f"composing {prompt}...")
if not weights:
# specify weights for prompts (excluding the unconditional score)
print("using equal positive weights (conjunction) for all prompts...")
weights = torch.tensor([guidance_scale] * len(prompt), device=self.device).reshape(-1, 1, 1, 1)
else:
# set prompt weight for each
num_prompts = len(prompt) if isinstance(prompt, list) else 1
weights = [float(w.strip()) for w in weights.split("|")]
# guidance scale as the default
if len(weights) < num_prompts:
weights.append(guidance_scale)
else:
weights = weights[:num_prompts]
assert len(weights) == len(prompt), "weights specified are not equal to the number of prompts"
weights = torch.tensor(weights, device=self.device).reshape(-1, 1, 1, 1)
else:
weights = guidance_scale
# 3. Encode input prompt
text_embeddings = self._encode_prompt(
prompt, device, num_images_per_prompt, do_classifier_free_guidance, negative_prompt
)
# 4. Prepare timesteps
self.scheduler.set_timesteps(num_inference_steps, device=device)
timesteps = self.scheduler.timesteps
# 5. Prepare latent variables
num_channels_latents = self.unet.config.in_channels
latents = self.prepare_latents(
batch_size * num_images_per_prompt,
num_channels_latents,
height,
width,
text_embeddings.dtype,
device,
generator,
latents,
)
# composable diffusion
if isinstance(prompt, list) and batch_size == 1:
# remove extra unconditional embedding
# N = one unconditional embed + conditional embeds
text_embeddings = text_embeddings[len(prompt) - 1 :]
# 6. Prepare extra step kwargs. TODO: Logic should ideally just be moved out of the pipeline
extra_step_kwargs = self.prepare_extra_step_kwargs(generator, eta)
# 7. Denoising loop
num_warmup_steps = len(timesteps) - num_inference_steps * self.scheduler.order
with self.progress_bar(total=num_inference_steps) as progress_bar:
for i, t in enumerate(timesteps):
# expand the latents if we are doing classifier free guidance
latent_model_input = torch.cat([latents] * 2) if do_classifier_free_guidance else latents
latent_model_input = self.scheduler.scale_model_input(latent_model_input, t)
# predict the noise residual
noise_pred = []
for j in range(text_embeddings.shape[0]):
noise_pred.append(
self.unet(latent_model_input[:1], t, encoder_hidden_states=text_embeddings[j : j + 1]).sample
)
noise_pred = torch.cat(noise_pred, dim=0)
# perform guidance
if do_classifier_free_guidance:
noise_pred_uncond, noise_pred_text = noise_pred[:1], noise_pred[1:]
noise_pred = noise_pred_uncond + (weights * (noise_pred_text - noise_pred_uncond)).sum(
dim=0, keepdims=True
)
# compute the previous noisy sample x_t -> x_t-1
latents = self.scheduler.step(noise_pred, t, latents, **extra_step_kwargs).prev_sample
# call the callback, if provided
if i == len(timesteps) - 1 or ((i + 1) > num_warmup_steps and (i + 1) % self.scheduler.order == 0):
progress_bar.update()
if callback is not None and i % callback_steps == 0:
step_idx = i // getattr(self.scheduler, "order", 1)
callback(step_idx, t, latents)
# 8. Post-processing
image = self.decode_latents(latents)
# 9. Run safety checker
image, has_nsfw_concept = self.run_safety_checker(image, device, text_embeddings.dtype)
# 10. Convert to PIL
if output_type == "pil":
image = self.numpy_to_pil(image)
if not return_dict:
return (image, has_nsfw_concept)
return StableDiffusionPipelineOutput(images=image, nsfw_content_detected=has_nsfw_concept)
| diffusers/examples/community/composable_stable_diffusion.py/0 | {
"file_path": "diffusers/examples/community/composable_stable_diffusion.py",
"repo_id": "diffusers",
"token_count": 12801
} | 90 |
import inspect
import re
from typing import Callable, List, Optional, Union
import numpy as np
import PIL.Image
import torch
from packaging import version
from transformers import CLIPImageProcessor, CLIPTokenizer
import diffusers
from diffusers import OnnxRuntimeModel, OnnxStableDiffusionPipeline, SchedulerMixin
from diffusers.pipelines.stable_diffusion import StableDiffusionPipelineOutput
from diffusers.utils import logging
try:
from diffusers.pipelines.onnx_utils import ORT_TO_NP_TYPE
except ImportError:
ORT_TO_NP_TYPE = {
"tensor(bool)": np.bool_,
"tensor(int8)": np.int8,
"tensor(uint8)": np.uint8,
"tensor(int16)": np.int16,
"tensor(uint16)": np.uint16,
"tensor(int32)": np.int32,
"tensor(uint32)": np.uint32,
"tensor(int64)": np.int64,
"tensor(uint64)": np.uint64,
"tensor(float16)": np.float16,
"tensor(float)": np.float32,
"tensor(double)": np.float64,
}
try:
from diffusers.utils import PIL_INTERPOLATION
except ImportError:
if version.parse(version.parse(PIL.__version__).base_version) >= version.parse("9.1.0"):
PIL_INTERPOLATION = {
"linear": PIL.Image.Resampling.BILINEAR,
"bilinear": PIL.Image.Resampling.BILINEAR,
"bicubic": PIL.Image.Resampling.BICUBIC,
"lanczos": PIL.Image.Resampling.LANCZOS,
"nearest": PIL.Image.Resampling.NEAREST,
}
else:
PIL_INTERPOLATION = {
"linear": PIL.Image.LINEAR,
"bilinear": PIL.Image.BILINEAR,
"bicubic": PIL.Image.BICUBIC,
"lanczos": PIL.Image.LANCZOS,
"nearest": PIL.Image.NEAREST,
}
# ------------------------------------------------------------------------------
logger = logging.get_logger(__name__) # pylint: disable=invalid-name
re_attention = re.compile(
r"""
\\\(|
\\\)|
\\\[|
\\]|
\\\\|
\\|
\(|
\[|
:([+-]?[.\d]+)\)|
\)|
]|
[^\\()\[\]:]+|
:
""",
re.X,
)
def parse_prompt_attention(text):
"""
Parses a string with attention tokens and returns a list of pairs: text and its associated weight.
Accepted tokens are:
(abc) - increases attention to abc by a multiplier of 1.1
(abc:3.12) - increases attention to abc by a multiplier of 3.12
[abc] - decreases attention to abc by a multiplier of 1.1
\\( - literal character '('
\\[ - literal character '['
\\) - literal character ')'
\\] - literal character ']'
\\ - literal character '\'
anything else - just text
>>> parse_prompt_attention('normal text')
[['normal text', 1.0]]
>>> parse_prompt_attention('an (important) word')
[['an ', 1.0], ['important', 1.1], [' word', 1.0]]
>>> parse_prompt_attention('(unbalanced')
[['unbalanced', 1.1]]
>>> parse_prompt_attention('\\(literal\\]')
[['(literal]', 1.0]]
>>> parse_prompt_attention('(unnecessary)(parens)')
[['unnecessaryparens', 1.1]]
>>> parse_prompt_attention('a (((house:1.3)) [on] a (hill:0.5), sun, (((sky))).')
[['a ', 1.0],
['house', 1.5730000000000004],
[' ', 1.1],
['on', 1.0],
[' a ', 1.1],
['hill', 0.55],
[', sun, ', 1.1],
['sky', 1.4641000000000006],
['.', 1.1]]
"""
res = []
round_brackets = []
square_brackets = []
round_bracket_multiplier = 1.1
square_bracket_multiplier = 1 / 1.1
def multiply_range(start_position, multiplier):
for p in range(start_position, len(res)):
res[p][1] *= multiplier
for m in re_attention.finditer(text):
text = m.group(0)
weight = m.group(1)
if text.startswith("\\"):
res.append([text[1:], 1.0])
elif text == "(":
round_brackets.append(len(res))
elif text == "[":
square_brackets.append(len(res))
elif weight is not None and len(round_brackets) > 0:
multiply_range(round_brackets.pop(), float(weight))
elif text == ")" and len(round_brackets) > 0:
multiply_range(round_brackets.pop(), round_bracket_multiplier)
elif text == "]" and len(square_brackets) > 0:
multiply_range(square_brackets.pop(), square_bracket_multiplier)
else:
res.append([text, 1.0])
for pos in round_brackets:
multiply_range(pos, round_bracket_multiplier)
for pos in square_brackets:
multiply_range(pos, square_bracket_multiplier)
if len(res) == 0:
res = [["", 1.0]]
# merge runs of identical weights
i = 0
while i + 1 < len(res):
if res[i][1] == res[i + 1][1]:
res[i][0] += res[i + 1][0]
res.pop(i + 1)
else:
i += 1
return res
def get_prompts_with_weights(pipe, prompt: List[str], max_length: int):
r"""
Tokenize a list of prompts and return its tokens with weights of each token.
No padding, starting or ending token is included.
"""
tokens = []
weights = []
truncated = False
for text in prompt:
texts_and_weights = parse_prompt_attention(text)
text_token = []
text_weight = []
for word, weight in texts_and_weights:
# tokenize and discard the starting and the ending token
token = pipe.tokenizer(word, return_tensors="np").input_ids[0, 1:-1]
text_token += list(token)
# copy the weight by length of token
text_weight += [weight] * len(token)
# stop if the text is too long (longer than truncation limit)
if len(text_token) > max_length:
truncated = True
break
# truncate
if len(text_token) > max_length:
truncated = True
text_token = text_token[:max_length]
text_weight = text_weight[:max_length]
tokens.append(text_token)
weights.append(text_weight)
if truncated:
logger.warning("Prompt was truncated. Try to shorten the prompt or increase max_embeddings_multiples")
return tokens, weights
def pad_tokens_and_weights(tokens, weights, max_length, bos, eos, pad, no_boseos_middle=True, chunk_length=77):
r"""
Pad the tokens (with starting and ending tokens) and weights (with 1.0) to max_length.
"""
max_embeddings_multiples = (max_length - 2) // (chunk_length - 2)
weights_length = max_length if no_boseos_middle else max_embeddings_multiples * chunk_length
for i in range(len(tokens)):
tokens[i] = [bos] + tokens[i] + [pad] * (max_length - 1 - len(tokens[i]) - 1) + [eos]
if no_boseos_middle:
weights[i] = [1.0] + weights[i] + [1.0] * (max_length - 1 - len(weights[i]))
else:
w = []
if len(weights[i]) == 0:
w = [1.0] * weights_length
else:
for j in range(max_embeddings_multiples):
w.append(1.0) # weight for starting token in this chunk
w += weights[i][j * (chunk_length - 2) : min(len(weights[i]), (j + 1) * (chunk_length - 2))]
w.append(1.0) # weight for ending token in this chunk
w += [1.0] * (weights_length - len(w))
weights[i] = w[:]
return tokens, weights
def get_unweighted_text_embeddings(
pipe,
text_input: np.array,
chunk_length: int,
no_boseos_middle: Optional[bool] = True,
):
"""
When the length of tokens is a multiple of the capacity of the text encoder,
it should be split into chunks and sent to the text encoder individually.
"""
max_embeddings_multiples = (text_input.shape[1] - 2) // (chunk_length - 2)
if max_embeddings_multiples > 1:
text_embeddings = []
for i in range(max_embeddings_multiples):
# extract the i-th chunk
text_input_chunk = text_input[:, i * (chunk_length - 2) : (i + 1) * (chunk_length - 2) + 2].copy()
# cover the head and the tail by the starting and the ending tokens
text_input_chunk[:, 0] = text_input[0, 0]
text_input_chunk[:, -1] = text_input[0, -1]
text_embedding = pipe.text_encoder(input_ids=text_input_chunk)[0]
if no_boseos_middle:
if i == 0:
# discard the ending token
text_embedding = text_embedding[:, :-1]
elif i == max_embeddings_multiples - 1:
# discard the starting token
text_embedding = text_embedding[:, 1:]
else:
# discard both starting and ending tokens
text_embedding = text_embedding[:, 1:-1]
text_embeddings.append(text_embedding)
text_embeddings = np.concatenate(text_embeddings, axis=1)
else:
text_embeddings = pipe.text_encoder(input_ids=text_input)[0]
return text_embeddings
def get_weighted_text_embeddings(
pipe,
prompt: Union[str, List[str]],
uncond_prompt: Optional[Union[str, List[str]]] = None,
max_embeddings_multiples: Optional[int] = 4,
no_boseos_middle: Optional[bool] = False,
skip_parsing: Optional[bool] = False,
skip_weighting: Optional[bool] = False,
**kwargs,
):
r"""
Prompts can be assigned with local weights using brackets. For example,
prompt 'A (very beautiful) masterpiece' highlights the words 'very beautiful',
and the embedding tokens corresponding to the words get multiplied by a constant, 1.1.
Also, to regularize of the embedding, the weighted embedding would be scaled to preserve the original mean.
Args:
pipe (`OnnxStableDiffusionPipeline`):
Pipe to provide access to the tokenizer and the text encoder.
prompt (`str` or `List[str]`):
The prompt or prompts to guide the image generation.
uncond_prompt (`str` or `List[str]`):
The unconditional prompt or prompts for guide the image generation. If unconditional prompt
is provided, the embeddings of prompt and uncond_prompt are concatenated.
max_embeddings_multiples (`int`, *optional*, defaults to `1`):
The max multiple length of prompt embeddings compared to the max output length of text encoder.
no_boseos_middle (`bool`, *optional*, defaults to `False`):
If the length of text token is multiples of the capacity of text encoder, whether reserve the starting and
ending token in each of the chunk in the middle.
skip_parsing (`bool`, *optional*, defaults to `False`):
Skip the parsing of brackets.
skip_weighting (`bool`, *optional*, defaults to `False`):
Skip the weighting. When the parsing is skipped, it is forced True.
"""
max_length = (pipe.tokenizer.model_max_length - 2) * max_embeddings_multiples + 2
if isinstance(prompt, str):
prompt = [prompt]
if not skip_parsing:
prompt_tokens, prompt_weights = get_prompts_with_weights(pipe, prompt, max_length - 2)
if uncond_prompt is not None:
if isinstance(uncond_prompt, str):
uncond_prompt = [uncond_prompt]
uncond_tokens, uncond_weights = get_prompts_with_weights(pipe, uncond_prompt, max_length - 2)
else:
prompt_tokens = [
token[1:-1]
for token in pipe.tokenizer(prompt, max_length=max_length, truncation=True, return_tensors="np").input_ids
]
prompt_weights = [[1.0] * len(token) for token in prompt_tokens]
if uncond_prompt is not None:
if isinstance(uncond_prompt, str):
uncond_prompt = [uncond_prompt]
uncond_tokens = [
token[1:-1]
for token in pipe.tokenizer(
uncond_prompt,
max_length=max_length,
truncation=True,
return_tensors="np",
).input_ids
]
uncond_weights = [[1.0] * len(token) for token in uncond_tokens]
# round up the longest length of tokens to a multiple of (model_max_length - 2)
max_length = max([len(token) for token in prompt_tokens])
if uncond_prompt is not None:
max_length = max(max_length, max([len(token) for token in uncond_tokens]))
max_embeddings_multiples = min(
max_embeddings_multiples,
(max_length - 1) // (pipe.tokenizer.model_max_length - 2) + 1,
)
max_embeddings_multiples = max(1, max_embeddings_multiples)
max_length = (pipe.tokenizer.model_max_length - 2) * max_embeddings_multiples + 2
# pad the length of tokens and weights
bos = pipe.tokenizer.bos_token_id
eos = pipe.tokenizer.eos_token_id
pad = getattr(pipe.tokenizer, "pad_token_id", eos)
prompt_tokens, prompt_weights = pad_tokens_and_weights(
prompt_tokens,
prompt_weights,
max_length,
bos,
eos,
pad,
no_boseos_middle=no_boseos_middle,
chunk_length=pipe.tokenizer.model_max_length,
)
prompt_tokens = np.array(prompt_tokens, dtype=np.int32)
if uncond_prompt is not None:
uncond_tokens, uncond_weights = pad_tokens_and_weights(
uncond_tokens,
uncond_weights,
max_length,
bos,
eos,
pad,
no_boseos_middle=no_boseos_middle,
chunk_length=pipe.tokenizer.model_max_length,
)
uncond_tokens = np.array(uncond_tokens, dtype=np.int32)
# get the embeddings
text_embeddings = get_unweighted_text_embeddings(
pipe,
prompt_tokens,
pipe.tokenizer.model_max_length,
no_boseos_middle=no_boseos_middle,
)
prompt_weights = np.array(prompt_weights, dtype=text_embeddings.dtype)
if uncond_prompt is not None:
uncond_embeddings = get_unweighted_text_embeddings(
pipe,
uncond_tokens,
pipe.tokenizer.model_max_length,
no_boseos_middle=no_boseos_middle,
)
uncond_weights = np.array(uncond_weights, dtype=uncond_embeddings.dtype)
# assign weights to the prompts and normalize in the sense of mean
# TODO: should we normalize by chunk or in a whole (current implementation)?
if (not skip_parsing) and (not skip_weighting):
previous_mean = text_embeddings.mean(axis=(-2, -1))
text_embeddings *= prompt_weights[:, :, None]
text_embeddings *= (previous_mean / text_embeddings.mean(axis=(-2, -1)))[:, None, None]
if uncond_prompt is not None:
previous_mean = uncond_embeddings.mean(axis=(-2, -1))
uncond_embeddings *= uncond_weights[:, :, None]
uncond_embeddings *= (previous_mean / uncond_embeddings.mean(axis=(-2, -1)))[:, None, None]
# For classifier free guidance, we need to do two forward passes.
# Here we concatenate the unconditional and text embeddings into a single batch
# to avoid doing two forward passes
if uncond_prompt is not None:
return text_embeddings, uncond_embeddings
return text_embeddings
def preprocess_image(image):
w, h = image.size
w, h = (x - x % 32 for x in (w, h)) # resize to integer multiple of 32
image = image.resize((w, h), resample=PIL_INTERPOLATION["lanczos"])
image = np.array(image).astype(np.float32) / 255.0
image = image[None].transpose(0, 3, 1, 2)
return 2.0 * image - 1.0
def preprocess_mask(mask, scale_factor=8):
mask = mask.convert("L")
w, h = mask.size
w, h = (x - x % 32 for x in (w, h)) # resize to integer multiple of 32
mask = mask.resize((w // scale_factor, h // scale_factor), resample=PIL_INTERPOLATION["nearest"])
mask = np.array(mask).astype(np.float32) / 255.0
mask = np.tile(mask, (4, 1, 1))
mask = mask[None].transpose(0, 1, 2, 3) # what does this step do?
mask = 1 - mask # repaint white, keep black
return mask
class OnnxStableDiffusionLongPromptWeightingPipeline(OnnxStableDiffusionPipeline):
r"""
Pipeline for text-to-image generation using Stable Diffusion without tokens length limit, and support parsing
weighting in prompt.
This model inherits from [`DiffusionPipeline`]. Check the superclass documentation for the generic methods the
library implements for all the pipelines (such as downloading or saving, running on a particular device, etc.)
"""
if version.parse(version.parse(diffusers.__version__).base_version) >= version.parse("0.9.0"):
def __init__(
self,
vae_encoder: OnnxRuntimeModel,
vae_decoder: OnnxRuntimeModel,
text_encoder: OnnxRuntimeModel,
tokenizer: CLIPTokenizer,
unet: OnnxRuntimeModel,
scheduler: SchedulerMixin,
safety_checker: OnnxRuntimeModel,
feature_extractor: CLIPImageProcessor,
requires_safety_checker: bool = True,
):
super().__init__(
vae_encoder=vae_encoder,
vae_decoder=vae_decoder,
text_encoder=text_encoder,
tokenizer=tokenizer,
unet=unet,
scheduler=scheduler,
safety_checker=safety_checker,
feature_extractor=feature_extractor,
requires_safety_checker=requires_safety_checker,
)
self.__init__additional__()
else:
def __init__(
self,
vae_encoder: OnnxRuntimeModel,
vae_decoder: OnnxRuntimeModel,
text_encoder: OnnxRuntimeModel,
tokenizer: CLIPTokenizer,
unet: OnnxRuntimeModel,
scheduler: SchedulerMixin,
safety_checker: OnnxRuntimeModel,
feature_extractor: CLIPImageProcessor,
):
super().__init__(
vae_encoder=vae_encoder,
vae_decoder=vae_decoder,
text_encoder=text_encoder,
tokenizer=tokenizer,
unet=unet,
scheduler=scheduler,
safety_checker=safety_checker,
feature_extractor=feature_extractor,
)
self.__init__additional__()
def __init__additional__(self):
self.unet.config.in_channels = 4
self.vae_scale_factor = 8
def _encode_prompt(
self,
prompt,
num_images_per_prompt,
do_classifier_free_guidance,
negative_prompt,
max_embeddings_multiples,
):
r"""
Encodes the prompt into text encoder hidden states.
Args:
prompt (`str` or `list(int)`):
prompt to be encoded
num_images_per_prompt (`int`):
number of images that should be generated per prompt
do_classifier_free_guidance (`bool`):
whether to use classifier free guidance or not
negative_prompt (`str` or `List[str]`):
The prompt or prompts not to guide the image generation. Ignored when not using guidance (i.e., ignored
if `guidance_scale` is less than `1`).
max_embeddings_multiples (`int`, *optional*, defaults to `3`):
The max multiple length of prompt embeddings compared to the max output length of text encoder.
"""
batch_size = len(prompt) if isinstance(prompt, list) else 1
if negative_prompt is None:
negative_prompt = [""] * batch_size
elif isinstance(negative_prompt, str):
negative_prompt = [negative_prompt] * batch_size
if batch_size != len(negative_prompt):
raise ValueError(
f"`negative_prompt`: {negative_prompt} has batch size {len(negative_prompt)}, but `prompt`:"
f" {prompt} has batch size {batch_size}. Please make sure that passed `negative_prompt` matches"
" the batch size of `prompt`."
)
text_embeddings, uncond_embeddings = get_weighted_text_embeddings(
pipe=self,
prompt=prompt,
uncond_prompt=negative_prompt if do_classifier_free_guidance else None,
max_embeddings_multiples=max_embeddings_multiples,
)
text_embeddings = text_embeddings.repeat(num_images_per_prompt, 0)
if do_classifier_free_guidance:
uncond_embeddings = uncond_embeddings.repeat(num_images_per_prompt, 0)
text_embeddings = np.concatenate([uncond_embeddings, text_embeddings])
return text_embeddings
def check_inputs(self, prompt, height, width, strength, callback_steps):
if not isinstance(prompt, str) and not isinstance(prompt, list):
raise ValueError(f"`prompt` has to be of type `str` or `list` but is {type(prompt)}")
if strength < 0 or strength > 1:
raise ValueError(f"The value of strength should in [0.0, 1.0] but is {strength}")
if height % 8 != 0 or width % 8 != 0:
raise ValueError(f"`height` and `width` have to be divisible by 8 but are {height} and {width}.")
if (callback_steps is None) or (
callback_steps is not None and (not isinstance(callback_steps, int) or callback_steps <= 0)
):
raise ValueError(
f"`callback_steps` has to be a positive integer but is {callback_steps} of type"
f" {type(callback_steps)}."
)
def get_timesteps(self, num_inference_steps, strength, is_text2img):
if is_text2img:
return self.scheduler.timesteps, num_inference_steps
else:
# get the original timestep using init_timestep
offset = self.scheduler.config.get("steps_offset", 0)
init_timestep = int(num_inference_steps * strength) + offset
init_timestep = min(init_timestep, num_inference_steps)
t_start = max(num_inference_steps - init_timestep + offset, 0)
timesteps = self.scheduler.timesteps[t_start:]
return timesteps, num_inference_steps - t_start
def run_safety_checker(self, image):
if self.safety_checker is not None:
safety_checker_input = self.feature_extractor(
self.numpy_to_pil(image), return_tensors="np"
).pixel_values.astype(image.dtype)
# There will throw an error if use safety_checker directly and batchsize>1
images, has_nsfw_concept = [], []
for i in range(image.shape[0]):
image_i, has_nsfw_concept_i = self.safety_checker(
clip_input=safety_checker_input[i : i + 1], images=image[i : i + 1]
)
images.append(image_i)
has_nsfw_concept.append(has_nsfw_concept_i[0])
image = np.concatenate(images)
else:
has_nsfw_concept = None
return image, has_nsfw_concept
def decode_latents(self, latents):
latents = 1 / 0.18215 * latents
# image = self.vae_decoder(latent_sample=latents)[0]
# it seems likes there is a strange result for using half-precision vae decoder if batchsize>1
image = np.concatenate(
[self.vae_decoder(latent_sample=latents[i : i + 1])[0] for i in range(latents.shape[0])]
)
image = np.clip(image / 2 + 0.5, 0, 1)
image = image.transpose((0, 2, 3, 1))
return image
def prepare_extra_step_kwargs(self, generator, eta):
# prepare extra kwargs for the scheduler step, since not all schedulers have the same signature
# eta (η) is only used with the DDIMScheduler, it will be ignored for other schedulers.
# eta corresponds to η in DDIM paper: https://arxiv.org/abs/2010.02502
# and should be between [0, 1]
accepts_eta = "eta" in set(inspect.signature(self.scheduler.step).parameters.keys())
extra_step_kwargs = {}
if accepts_eta:
extra_step_kwargs["eta"] = eta
# check if the scheduler accepts generator
accepts_generator = "generator" in set(inspect.signature(self.scheduler.step).parameters.keys())
if accepts_generator:
extra_step_kwargs["generator"] = generator
return extra_step_kwargs
def prepare_latents(self, image, timestep, batch_size, height, width, dtype, generator, latents=None):
if image is None:
shape = (
batch_size,
self.unet.config.in_channels,
height // self.vae_scale_factor,
width // self.vae_scale_factor,
)
if latents is None:
latents = torch.randn(shape, generator=generator, device="cpu").numpy().astype(dtype)
else:
if latents.shape != shape:
raise ValueError(f"Unexpected latents shape, got {latents.shape}, expected {shape}")
# scale the initial noise by the standard deviation required by the scheduler
latents = (torch.from_numpy(latents) * self.scheduler.init_noise_sigma).numpy()
return latents, None, None
else:
init_latents = self.vae_encoder(sample=image)[0]
init_latents = 0.18215 * init_latents
init_latents = np.concatenate([init_latents] * batch_size, axis=0)
init_latents_orig = init_latents
shape = init_latents.shape
# add noise to latents using the timesteps
noise = torch.randn(shape, generator=generator, device="cpu").numpy().astype(dtype)
latents = self.scheduler.add_noise(
torch.from_numpy(init_latents), torch.from_numpy(noise), timestep
).numpy()
return latents, init_latents_orig, noise
@torch.no_grad()
def __call__(
self,
prompt: Union[str, List[str]],
negative_prompt: Optional[Union[str, List[str]]] = None,
image: Union[np.ndarray, PIL.Image.Image] = None,
mask_image: Union[np.ndarray, PIL.Image.Image] = None,
height: int = 512,
width: int = 512,
num_inference_steps: int = 50,
guidance_scale: float = 7.5,
strength: float = 0.8,
num_images_per_prompt: Optional[int] = 1,
eta: float = 0.0,
generator: Optional[torch.Generator] = None,
latents: Optional[np.ndarray] = None,
max_embeddings_multiples: Optional[int] = 3,
output_type: Optional[str] = "pil",
return_dict: bool = True,
callback: Optional[Callable[[int, int, np.ndarray], None]] = None,
is_cancelled_callback: Optional[Callable[[], bool]] = None,
callback_steps: int = 1,
**kwargs,
):
r"""
Function invoked when calling the pipeline for generation.
Args:
prompt (`str` or `List[str]`):
The prompt or prompts to guide the image generation.
negative_prompt (`str` or `List[str]`, *optional*):
The prompt or prompts not to guide the image generation. Ignored when not using guidance (i.e., ignored
if `guidance_scale` is less than `1`).
image (`np.ndarray` or `PIL.Image.Image`):
`Image`, or tensor representing an image batch, that will be used as the starting point for the
process.
mask_image (`np.ndarray` or `PIL.Image.Image`):
`Image`, or tensor representing an image batch, to mask `image`. White pixels in the mask will be
replaced by noise and therefore repainted, while black pixels will be preserved. If `mask_image` is a
PIL image, it will be converted to a single channel (luminance) before use. If it's a tensor, it should
contain one color channel (L) instead of 3, so the expected shape would be `(B, H, W, 1)`.
height (`int`, *optional*, defaults to 512):
The height in pixels of the generated image.
width (`int`, *optional*, defaults to 512):
The width in pixels of the generated image.
num_inference_steps (`int`, *optional*, defaults to 50):
The number of denoising steps. More denoising steps usually lead to a higher quality image at the
expense of slower inference.
guidance_scale (`float`, *optional*, defaults to 7.5):
Guidance scale as defined in [Classifier-Free Diffusion Guidance](https://arxiv.org/abs/2207.12598).
`guidance_scale` is defined as `w` of equation 2. of [Imagen
Paper](https://arxiv.org/pdf/2205.11487.pdf). Guidance scale is enabled by setting `guidance_scale >
1`. Higher guidance scale encourages to generate images that are closely linked to the text `prompt`,
usually at the expense of lower image quality.
strength (`float`, *optional*, defaults to 0.8):
Conceptually, indicates how much to transform the reference `image`. Must be between 0 and 1.
`image` will be used as a starting point, adding more noise to it the larger the `strength`. The
number of denoising steps depends on the amount of noise initially added. When `strength` is 1, added
noise will be maximum and the denoising process will run for the full number of iterations specified in
`num_inference_steps`. A value of 1, therefore, essentially ignores `image`.
num_images_per_prompt (`int`, *optional*, defaults to 1):
The number of images to generate per prompt.
eta (`float`, *optional*, defaults to 0.0):
Corresponds to parameter eta (η) in the DDIM paper: https://arxiv.org/abs/2010.02502. Only applies to
[`schedulers.DDIMScheduler`], will be ignored for others.
generator (`torch.Generator`, *optional*):
A [torch generator](https://pytorch.org/docs/stable/generated/torch.Generator.html) to make generation
deterministic.
latents (`np.ndarray`, *optional*):
Pre-generated noisy latents, sampled from a Gaussian distribution, to be used as inputs for image
generation. Can be used to tweak the same generation with different prompts. If not provided, a latents
tensor will ge generated by sampling using the supplied random `generator`.
max_embeddings_multiples (`int`, *optional*, defaults to `3`):
The max multiple length of prompt embeddings compared to the max output length of text encoder.
output_type (`str`, *optional*, defaults to `"pil"`):
The output format of the generate image. Choose between
[PIL](https://pillow.readthedocs.io/en/stable/): `PIL.Image.Image` or `np.array`.
return_dict (`bool`, *optional*, defaults to `True`):
Whether or not to return a [`~pipelines.stable_diffusion.StableDiffusionPipelineOutput`] instead of a
plain tuple.
callback (`Callable`, *optional*):
A function that will be called every `callback_steps` steps during inference. The function will be
called with the following arguments: `callback(step: int, timestep: int, latents: np.ndarray)`.
is_cancelled_callback (`Callable`, *optional*):
A function that will be called every `callback_steps` steps during inference. If the function returns
`True`, the inference will be cancelled.
callback_steps (`int`, *optional*, defaults to 1):
The frequency at which the `callback` function will be called. If not specified, the callback will be
called at every step.
Returns:
`None` if cancelled by `is_cancelled_callback`,
[`~pipelines.stable_diffusion.StableDiffusionPipelineOutput`] or `tuple`:
[`~pipelines.stable_diffusion.StableDiffusionPipelineOutput`] if `return_dict` is True, otherwise a `tuple.
When returning a tuple, the first element is a list with the generated images, and the second element is a
list of `bool`s denoting whether the corresponding generated image likely represents "not-safe-for-work"
(nsfw) content, according to the `safety_checker`.
"""
# 0. Default height and width to unet
height = height or self.unet.config.sample_size * self.vae_scale_factor
width = width or self.unet.config.sample_size * self.vae_scale_factor
# 1. Check inputs. Raise error if not correct
self.check_inputs(prompt, height, width, strength, callback_steps)
# 2. Define call parameters
batch_size = 1 if isinstance(prompt, str) else len(prompt)
# here `guidance_scale` is defined analog to the guidance weight `w` of equation (2)
# of the Imagen paper: https://arxiv.org/pdf/2205.11487.pdf . `guidance_scale = 1`
# corresponds to doing no classifier free guidance.
do_classifier_free_guidance = guidance_scale > 1.0
# 3. Encode input prompt
text_embeddings = self._encode_prompt(
prompt,
num_images_per_prompt,
do_classifier_free_guidance,
negative_prompt,
max_embeddings_multiples,
)
dtype = text_embeddings.dtype
# 4. Preprocess image and mask
if isinstance(image, PIL.Image.Image):
image = preprocess_image(image)
if image is not None:
image = image.astype(dtype)
if isinstance(mask_image, PIL.Image.Image):
mask_image = preprocess_mask(mask_image, self.vae_scale_factor)
if mask_image is not None:
mask = mask_image.astype(dtype)
mask = np.concatenate([mask] * batch_size * num_images_per_prompt)
else:
mask = None
# 5. set timesteps
self.scheduler.set_timesteps(num_inference_steps)
timestep_dtype = next(
(input.type for input in self.unet.model.get_inputs() if input.name == "timestep"), "tensor(float)"
)
timestep_dtype = ORT_TO_NP_TYPE[timestep_dtype]
timesteps, num_inference_steps = self.get_timesteps(num_inference_steps, strength, image is None)
latent_timestep = timesteps[:1].repeat(batch_size * num_images_per_prompt)
# 6. Prepare latent variables
latents, init_latents_orig, noise = self.prepare_latents(
image,
latent_timestep,
batch_size * num_images_per_prompt,
height,
width,
dtype,
generator,
latents,
)
# 7. Prepare extra step kwargs. TODO: Logic should ideally just be moved out of the pipeline
extra_step_kwargs = self.prepare_extra_step_kwargs(generator, eta)
# 8. Denoising loop
for i, t in enumerate(self.progress_bar(timesteps)):
# expand the latents if we are doing classifier free guidance
latent_model_input = np.concatenate([latents] * 2) if do_classifier_free_guidance else latents
latent_model_input = self.scheduler.scale_model_input(torch.from_numpy(latent_model_input), t)
latent_model_input = latent_model_input.numpy()
# predict the noise residual
noise_pred = self.unet(
sample=latent_model_input,
timestep=np.array([t], dtype=timestep_dtype),
encoder_hidden_states=text_embeddings,
)
noise_pred = noise_pred[0]
# perform guidance
if do_classifier_free_guidance:
noise_pred_uncond, noise_pred_text = np.split(noise_pred, 2)
noise_pred = noise_pred_uncond + guidance_scale * (noise_pred_text - noise_pred_uncond)
# compute the previous noisy sample x_t -> x_t-1
scheduler_output = self.scheduler.step(
torch.from_numpy(noise_pred), t, torch.from_numpy(latents), **extra_step_kwargs
)
latents = scheduler_output.prev_sample.numpy()
if mask is not None:
# masking
init_latents_proper = self.scheduler.add_noise(
torch.from_numpy(init_latents_orig),
torch.from_numpy(noise),
t,
).numpy()
latents = (init_latents_proper * mask) + (latents * (1 - mask))
# call the callback, if provided
if i % callback_steps == 0:
if callback is not None:
step_idx = i // getattr(self.scheduler, "order", 1)
callback(step_idx, t, latents)
if is_cancelled_callback is not None and is_cancelled_callback():
return None
# 9. Post-processing
image = self.decode_latents(latents)
# 10. Run safety checker
image, has_nsfw_concept = self.run_safety_checker(image)
# 11. Convert to PIL
if output_type == "pil":
image = self.numpy_to_pil(image)
if not return_dict:
return image, has_nsfw_concept
return StableDiffusionPipelineOutput(images=image, nsfw_content_detected=has_nsfw_concept)
def text2img(
self,
prompt: Union[str, List[str]],
negative_prompt: Optional[Union[str, List[str]]] = None,
height: int = 512,
width: int = 512,
num_inference_steps: int = 50,
guidance_scale: float = 7.5,
num_images_per_prompt: Optional[int] = 1,
eta: float = 0.0,
generator: Optional[torch.Generator] = None,
latents: Optional[np.ndarray] = None,
max_embeddings_multiples: Optional[int] = 3,
output_type: Optional[str] = "pil",
return_dict: bool = True,
callback: Optional[Callable[[int, int, np.ndarray], None]] = None,
callback_steps: int = 1,
**kwargs,
):
r"""
Function for text-to-image generation.
Args:
prompt (`str` or `List[str]`):
The prompt or prompts to guide the image generation.
negative_prompt (`str` or `List[str]`, *optional*):
The prompt or prompts not to guide the image generation. Ignored when not using guidance (i.e., ignored
if `guidance_scale` is less than `1`).
height (`int`, *optional*, defaults to 512):
The height in pixels of the generated image.
width (`int`, *optional*, defaults to 512):
The width in pixels of the generated image.
num_inference_steps (`int`, *optional*, defaults to 50):
The number of denoising steps. More denoising steps usually lead to a higher quality image at the
expense of slower inference.
guidance_scale (`float`, *optional*, defaults to 7.5):
Guidance scale as defined in [Classifier-Free Diffusion Guidance](https://arxiv.org/abs/2207.12598).
`guidance_scale` is defined as `w` of equation 2. of [Imagen
Paper](https://arxiv.org/pdf/2205.11487.pdf). Guidance scale is enabled by setting `guidance_scale >
1`. Higher guidance scale encourages to generate images that are closely linked to the text `prompt`,
usually at the expense of lower image quality.
num_images_per_prompt (`int`, *optional*, defaults to 1):
The number of images to generate per prompt.
eta (`float`, *optional*, defaults to 0.0):
Corresponds to parameter eta (η) in the DDIM paper: https://arxiv.org/abs/2010.02502. Only applies to
[`schedulers.DDIMScheduler`], will be ignored for others.
generator (`torch.Generator`, *optional*):
A [torch generator](https://pytorch.org/docs/stable/generated/torch.Generator.html) to make generation
deterministic.
latents (`np.ndarray`, *optional*):
Pre-generated noisy latents, sampled from a Gaussian distribution, to be used as inputs for image
generation. Can be used to tweak the same generation with different prompts. If not provided, a latents
tensor will ge generated by sampling using the supplied random `generator`.
max_embeddings_multiples (`int`, *optional*, defaults to `3`):
The max multiple length of prompt embeddings compared to the max output length of text encoder.
output_type (`str`, *optional*, defaults to `"pil"`):
The output format of the generate image. Choose between
[PIL](https://pillow.readthedocs.io/en/stable/): `PIL.Image.Image` or `np.array`.
return_dict (`bool`, *optional*, defaults to `True`):
Whether or not to return a [`~pipelines.stable_diffusion.StableDiffusionPipelineOutput`] instead of a
plain tuple.
callback (`Callable`, *optional*):
A function that will be called every `callback_steps` steps during inference. The function will be
called with the following arguments: `callback(step: int, timestep: int, latents: np.ndarray)`.
callback_steps (`int`, *optional*, defaults to 1):
The frequency at which the `callback` function will be called. If not specified, the callback will be
called at every step.
Returns:
[`~pipelines.stable_diffusion.StableDiffusionPipelineOutput`] or `tuple`:
[`~pipelines.stable_diffusion.StableDiffusionPipelineOutput`] if `return_dict` is True, otherwise a `tuple.
When returning a tuple, the first element is a list with the generated images, and the second element is a
list of `bool`s denoting whether the corresponding generated image likely represents "not-safe-for-work"
(nsfw) content, according to the `safety_checker`.
"""
return self.__call__(
prompt=prompt,
negative_prompt=negative_prompt,
height=height,
width=width,
num_inference_steps=num_inference_steps,
guidance_scale=guidance_scale,
num_images_per_prompt=num_images_per_prompt,
eta=eta,
generator=generator,
latents=latents,
max_embeddings_multiples=max_embeddings_multiples,
output_type=output_type,
return_dict=return_dict,
callback=callback,
callback_steps=callback_steps,
**kwargs,
)
def img2img(
self,
image: Union[np.ndarray, PIL.Image.Image],
prompt: Union[str, List[str]],
negative_prompt: Optional[Union[str, List[str]]] = None,
strength: float = 0.8,
num_inference_steps: Optional[int] = 50,
guidance_scale: Optional[float] = 7.5,
num_images_per_prompt: Optional[int] = 1,
eta: Optional[float] = 0.0,
generator: Optional[torch.Generator] = None,
max_embeddings_multiples: Optional[int] = 3,
output_type: Optional[str] = "pil",
return_dict: bool = True,
callback: Optional[Callable[[int, int, np.ndarray], None]] = None,
callback_steps: int = 1,
**kwargs,
):
r"""
Function for image-to-image generation.
Args:
image (`np.ndarray` or `PIL.Image.Image`):
`Image`, or ndarray representing an image batch, that will be used as the starting point for the
process.
prompt (`str` or `List[str]`):
The prompt or prompts to guide the image generation.
negative_prompt (`str` or `List[str]`, *optional*):
The prompt or prompts not to guide the image generation. Ignored when not using guidance (i.e., ignored
if `guidance_scale` is less than `1`).
strength (`float`, *optional*, defaults to 0.8):
Conceptually, indicates how much to transform the reference `image`. Must be between 0 and 1.
`image` will be used as a starting point, adding more noise to it the larger the `strength`. The
number of denoising steps depends on the amount of noise initially added. When `strength` is 1, added
noise will be maximum and the denoising process will run for the full number of iterations specified in
`num_inference_steps`. A value of 1, therefore, essentially ignores `image`.
num_inference_steps (`int`, *optional*, defaults to 50):
The number of denoising steps. More denoising steps usually lead to a higher quality image at the
expense of slower inference. This parameter will be modulated by `strength`.
guidance_scale (`float`, *optional*, defaults to 7.5):
Guidance scale as defined in [Classifier-Free Diffusion Guidance](https://arxiv.org/abs/2207.12598).
`guidance_scale` is defined as `w` of equation 2. of [Imagen
Paper](https://arxiv.org/pdf/2205.11487.pdf). Guidance scale is enabled by setting `guidance_scale >
1`. Higher guidance scale encourages to generate images that are closely linked to the text `prompt`,
usually at the expense of lower image quality.
num_images_per_prompt (`int`, *optional*, defaults to 1):
The number of images to generate per prompt.
eta (`float`, *optional*, defaults to 0.0):
Corresponds to parameter eta (η) in the DDIM paper: https://arxiv.org/abs/2010.02502. Only applies to
[`schedulers.DDIMScheduler`], will be ignored for others.
generator (`torch.Generator`, *optional*):
A [torch generator](https://pytorch.org/docs/stable/generated/torch.Generator.html) to make generation
deterministic.
max_embeddings_multiples (`int`, *optional*, defaults to `3`):
The max multiple length of prompt embeddings compared to the max output length of text encoder.
output_type (`str`, *optional*, defaults to `"pil"`):
The output format of the generate image. Choose between
[PIL](https://pillow.readthedocs.io/en/stable/): `PIL.Image.Image` or `np.array`.
return_dict (`bool`, *optional*, defaults to `True`):
Whether or not to return a [`~pipelines.stable_diffusion.StableDiffusionPipelineOutput`] instead of a
plain tuple.
callback (`Callable`, *optional*):
A function that will be called every `callback_steps` steps during inference. The function will be
called with the following arguments: `callback(step: int, timestep: int, latents: np.ndarray)`.
callback_steps (`int`, *optional*, defaults to 1):
The frequency at which the `callback` function will be called. If not specified, the callback will be
called at every step.
Returns:
[`~pipelines.stable_diffusion.StableDiffusionPipelineOutput`] or `tuple`:
[`~pipelines.stable_diffusion.StableDiffusionPipelineOutput`] if `return_dict` is True, otherwise a `tuple.
When returning a tuple, the first element is a list with the generated images, and the second element is a
list of `bool`s denoting whether the corresponding generated image likely represents "not-safe-for-work"
(nsfw) content, according to the `safety_checker`.
"""
return self.__call__(
prompt=prompt,
negative_prompt=negative_prompt,
image=image,
num_inference_steps=num_inference_steps,
guidance_scale=guidance_scale,
strength=strength,
num_images_per_prompt=num_images_per_prompt,
eta=eta,
generator=generator,
max_embeddings_multiples=max_embeddings_multiples,
output_type=output_type,
return_dict=return_dict,
callback=callback,
callback_steps=callback_steps,
**kwargs,
)
def inpaint(
self,
image: Union[np.ndarray, PIL.Image.Image],
mask_image: Union[np.ndarray, PIL.Image.Image],
prompt: Union[str, List[str]],
negative_prompt: Optional[Union[str, List[str]]] = None,
strength: float = 0.8,
num_inference_steps: Optional[int] = 50,
guidance_scale: Optional[float] = 7.5,
num_images_per_prompt: Optional[int] = 1,
eta: Optional[float] = 0.0,
generator: Optional[torch.Generator] = None,
max_embeddings_multiples: Optional[int] = 3,
output_type: Optional[str] = "pil",
return_dict: bool = True,
callback: Optional[Callable[[int, int, np.ndarray], None]] = None,
callback_steps: int = 1,
**kwargs,
):
r"""
Function for inpaint.
Args:
image (`np.ndarray` or `PIL.Image.Image`):
`Image`, or tensor representing an image batch, that will be used as the starting point for the
process. This is the image whose masked region will be inpainted.
mask_image (`np.ndarray` or `PIL.Image.Image`):
`Image`, or tensor representing an image batch, to mask `image`. White pixels in the mask will be
replaced by noise and therefore repainted, while black pixels will be preserved. If `mask_image` is a
PIL image, it will be converted to a single channel (luminance) before use. If it's a tensor, it should
contain one color channel (L) instead of 3, so the expected shape would be `(B, H, W, 1)`.
prompt (`str` or `List[str]`):
The prompt or prompts to guide the image generation.
negative_prompt (`str` or `List[str]`, *optional*):
The prompt or prompts not to guide the image generation. Ignored when not using guidance (i.e., ignored
if `guidance_scale` is less than `1`).
strength (`float`, *optional*, defaults to 0.8):
Conceptually, indicates how much to inpaint the masked area. Must be between 0 and 1. When `strength`
is 1, the denoising process will be run on the masked area for the full number of iterations specified
in `num_inference_steps`. `image` will be used as a reference for the masked area, adding more
noise to that region the larger the `strength`. If `strength` is 0, no inpainting will occur.
num_inference_steps (`int`, *optional*, defaults to 50):
The reference number of denoising steps. More denoising steps usually lead to a higher quality image at
the expense of slower inference. This parameter will be modulated by `strength`, as explained above.
guidance_scale (`float`, *optional*, defaults to 7.5):
Guidance scale as defined in [Classifier-Free Diffusion Guidance](https://arxiv.org/abs/2207.12598).
`guidance_scale` is defined as `w` of equation 2. of [Imagen
Paper](https://arxiv.org/pdf/2205.11487.pdf). Guidance scale is enabled by setting `guidance_scale >
1`. Higher guidance scale encourages to generate images that are closely linked to the text `prompt`,
usually at the expense of lower image quality.
num_images_per_prompt (`int`, *optional*, defaults to 1):
The number of images to generate per prompt.
eta (`float`, *optional*, defaults to 0.0):
Corresponds to parameter eta (η) in the DDIM paper: https://arxiv.org/abs/2010.02502. Only applies to
[`schedulers.DDIMScheduler`], will be ignored for others.
generator (`torch.Generator`, *optional*):
A [torch generator](https://pytorch.org/docs/stable/generated/torch.Generator.html) to make generation
deterministic.
max_embeddings_multiples (`int`, *optional*, defaults to `3`):
The max multiple length of prompt embeddings compared to the max output length of text encoder.
output_type (`str`, *optional*, defaults to `"pil"`):
The output format of the generate image. Choose between
[PIL](https://pillow.readthedocs.io/en/stable/): `PIL.Image.Image` or `np.array`.
return_dict (`bool`, *optional*, defaults to `True`):
Whether or not to return a [`~pipelines.stable_diffusion.StableDiffusionPipelineOutput`] instead of a
plain tuple.
callback (`Callable`, *optional*):
A function that will be called every `callback_steps` steps during inference. The function will be
called with the following arguments: `callback(step: int, timestep: int, latents: np.ndarray)`.
callback_steps (`int`, *optional*, defaults to 1):
The frequency at which the `callback` function will be called. If not specified, the callback will be
called at every step.
Returns:
[`~pipelines.stable_diffusion.StableDiffusionPipelineOutput`] or `tuple`:
[`~pipelines.stable_diffusion.StableDiffusionPipelineOutput`] if `return_dict` is True, otherwise a `tuple.
When returning a tuple, the first element is a list with the generated images, and the second element is a
list of `bool`s denoting whether the corresponding generated image likely represents "not-safe-for-work"
(nsfw) content, according to the `safety_checker`.
"""
return self.__call__(
prompt=prompt,
negative_prompt=negative_prompt,
image=image,
mask_image=mask_image,
num_inference_steps=num_inference_steps,
guidance_scale=guidance_scale,
strength=strength,
num_images_per_prompt=num_images_per_prompt,
eta=eta,
generator=generator,
max_embeddings_multiples=max_embeddings_multiples,
output_type=output_type,
return_dict=return_dict,
callback=callback,
callback_steps=callback_steps,
**kwargs,
)
| diffusers/examples/community/lpw_stable_diffusion_onnx.py/0 | {
"file_path": "diffusers/examples/community/lpw_stable_diffusion_onnx.py",
"repo_id": "diffusers",
"token_count": 24240
} | 91 |
# Copyright 2023 The Intel Labs Team Authors and the HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import inspect
from typing import Any, Callable, Dict, List, Optional, Union
import numpy as np
import PIL
import torch
from transformers import CLIPImageProcessor, CLIPTextModel, CLIPTokenizer
from diffusers import DiffusionPipeline
from diffusers.image_processor import PipelineDepthInput, PipelineImageInput, VaeImageProcessorLDM3D
from diffusers.loaders import FromSingleFileMixin, LoraLoaderMixin, TextualInversionLoaderMixin
from diffusers.models import AutoencoderKL, UNet2DConditionModel
from diffusers.models.lora import adjust_lora_scale_text_encoder
from diffusers.pipelines.stable_diffusion import StableDiffusionSafetyChecker
from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion_ldm3d import LDM3DPipelineOutput
from diffusers.schedulers import DDPMScheduler, KarrasDiffusionSchedulers
from diffusers.utils import (
USE_PEFT_BACKEND,
deprecate,
logging,
scale_lora_layers,
unscale_lora_layers,
)
from diffusers.utils.torch_utils import randn_tensor
logger = logging.get_logger(__name__) # pylint: disable=invalid-name
EXAMPLE_DOC_STRING = """
Examples:
```python
>>> from diffusers import StableDiffusionUpscaleLDM3DPipeline
>>> from PIL import Image
>>> from io import BytesIO
>>> import requests
>>> pipe = StableDiffusionUpscaleLDM3DPipeline.from_pretrained("Intel/ldm3d-sr")
>>> pipe = pipe.to("cuda")
>>> rgb_path = "https://huggingface.co/Intel/ldm3d-sr/resolve/main/lemons_ldm3d_rgb.jpg"
>>> depth_path = "https://huggingface.co/Intel/ldm3d-sr/resolve/main/lemons_ldm3d_depth.png"
>>> low_res_rgb = Image.open(BytesIO(requests.get(rgb_path).content)).convert("RGB")
>>> low_res_depth = Image.open(BytesIO(requests.get(depth_path).content)).convert("L")
>>> output = pipe(
... prompt="high quality high resolution uhd 4k image",
... rgb=low_res_rgb,
... depth=low_res_depth,
... num_inference_steps=50,
... target_res=[1024, 1024],
... )
>>> rgb_image, depth_image = output.rgb, output.depth
>>> rgb_image[0].save("hr_ldm3d_rgb.jpg")
>>> depth_image[0].save("hr_ldm3d_depth.png")
```
"""
class StableDiffusionUpscaleLDM3DPipeline(
DiffusionPipeline, TextualInversionLoaderMixin, LoraLoaderMixin, FromSingleFileMixin
):
r"""
Pipeline for text-to-image and 3D generation using LDM3D.
This model inherits from [`DiffusionPipeline`]. Check the superclass documentation for the generic methods
implemented for all pipelines (downloading, saving, running on a particular device, etc.).
The pipeline also inherits the following loading methods:
- [`~loaders.TextualInversionLoaderMixin.load_textual_inversion`] for loading textual inversion embeddings
- [`~loaders.LoraLoaderMixin.load_lora_weights`] for loading LoRA weights
- [`~loaders.LoraLoaderMixin.save_lora_weights`] for saving LoRA weights
- [`~loaders.FromSingleFileMixin.from_single_file`] for loading `.ckpt` files
Args:
vae ([`AutoencoderKL`]):
Variational Auto-Encoder (VAE) model to encode and decode images to and from latent representations.
text_encoder ([`~transformers.CLIPTextModel`]):
Frozen text-encoder ([clip-vit-large-patch14](https://huggingface.co/openai/clip-vit-large-patch14)).
tokenizer ([`~transformers.CLIPTokenizer`]):
A `CLIPTokenizer` to tokenize text.
unet ([`UNet2DConditionModel`]):
A `UNet2DConditionModel` to denoise the encoded image latents.
low_res_scheduler ([`SchedulerMixin`]):
A scheduler used to add initial noise to the low resolution conditioning image. It must be an instance of
[`DDPMScheduler`].
scheduler ([`SchedulerMixin`]):
A scheduler to be used in combination with `unet` to denoise the encoded image latents. Can be one of
[`DDIMScheduler`], [`LMSDiscreteScheduler`], or [`PNDMScheduler`].
safety_checker ([`StableDiffusionSafetyChecker`]):
Classification module that estimates whether generated images could be considered offensive or harmful.
Please refer to the [model card](https://huggingface.co/runwayml/stable-diffusion-v1-5) for more details
about a model's potential harms.
feature_extractor ([`~transformers.CLIPImageProcessor`]):
A `CLIPImageProcessor` to extract features from generated images; used as inputs to the `safety_checker`.
"""
_optional_components = ["safety_checker", "feature_extractor"]
def __init__(
self,
vae: AutoencoderKL,
text_encoder: CLIPTextModel,
tokenizer: CLIPTokenizer,
unet: UNet2DConditionModel,
low_res_scheduler: DDPMScheduler,
scheduler: KarrasDiffusionSchedulers,
safety_checker: StableDiffusionSafetyChecker,
feature_extractor: CLIPImageProcessor,
requires_safety_checker: bool = True,
watermarker: Optional[Any] = None,
max_noise_level: int = 350,
):
super().__init__()
if safety_checker is None and requires_safety_checker:
logger.warning(
f"You have disabled the safety checker for {self.__class__} by passing `safety_checker=None`. Ensure"
" that you abide to the conditions of the Stable Diffusion license and do not expose unfiltered"
" results in services or applications open to the public. Both the diffusers team and Hugging Face"
" strongly recommend to keep the safety filter enabled in all public facing circumstances, disabling"
" it only for use-cases that involve analyzing network behavior or auditing its results. For more"
" information, please have a look at https://github.com/huggingface/diffusers/pull/254 ."
)
if safety_checker is not None and feature_extractor is None:
raise ValueError(
"Make sure to define a feature extractor when loading {self.__class__} if you want to use the safety"
" checker. If you do not want to use the safety checker, you can pass `'safety_checker=None'` instead."
)
self.register_modules(
vae=vae,
text_encoder=text_encoder,
tokenizer=tokenizer,
unet=unet,
low_res_scheduler=low_res_scheduler,
scheduler=scheduler,
safety_checker=safety_checker,
watermarker=watermarker,
feature_extractor=feature_extractor,
)
self.vae_scale_factor = 2 ** (len(self.vae.config.block_out_channels) - 1)
self.image_processor = VaeImageProcessorLDM3D(vae_scale_factor=self.vae_scale_factor, resample="bilinear")
# self.register_to_config(requires_safety_checker=requires_safety_checker)
self.register_to_config(max_noise_level=max_noise_level)
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion_ldm3d.StableDiffusionLDM3DPipeline._encode_prompt
def _encode_prompt(
self,
prompt,
device,
num_images_per_prompt,
do_classifier_free_guidance,
negative_prompt=None,
prompt_embeds: Optional[torch.FloatTensor] = None,
negative_prompt_embeds: Optional[torch.FloatTensor] = None,
lora_scale: Optional[float] = None,
**kwargs,
):
deprecation_message = "`_encode_prompt()` is deprecated and it will be removed in a future version. Use `encode_prompt()` instead. Also, be aware that the output format changed from a concatenated tensor to a tuple."
deprecate("_encode_prompt()", "1.0.0", deprecation_message, standard_warn=False)
prompt_embeds_tuple = self.encode_prompt(
prompt=prompt,
device=device,
num_images_per_prompt=num_images_per_prompt,
do_classifier_free_guidance=do_classifier_free_guidance,
negative_prompt=negative_prompt,
prompt_embeds=prompt_embeds,
negative_prompt_embeds=negative_prompt_embeds,
lora_scale=lora_scale,
**kwargs,
)
# concatenate for backwards comp
prompt_embeds = torch.cat([prompt_embeds_tuple[1], prompt_embeds_tuple[0]])
return prompt_embeds
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion_ldm3d.StableDiffusionLDM3DPipeline.encode_prompt
def encode_prompt(
self,
prompt,
device,
num_images_per_prompt,
do_classifier_free_guidance,
negative_prompt=None,
prompt_embeds: Optional[torch.FloatTensor] = None,
negative_prompt_embeds: Optional[torch.FloatTensor] = None,
lora_scale: Optional[float] = None,
clip_skip: Optional[int] = None,
):
r"""
Encodes the prompt into text encoder hidden states.
Args:
prompt (`str` or `List[str]`, *optional*):
prompt to be encoded
device: (`torch.device`):
torch device
num_images_per_prompt (`int`):
number of images that should be generated per prompt
do_classifier_free_guidance (`bool`):
whether to use classifier free guidance or not
negative_prompt (`str` or `List[str]`, *optional*):
The prompt or prompts not to guide the image generation. If not defined, one has to pass
`negative_prompt_embeds` instead. Ignored when not using guidance (i.e., ignored if `guidance_scale` is
less than `1`).
prompt_embeds (`torch.FloatTensor`, *optional*):
Pre-generated text embeddings. Can be used to easily tweak text inputs, *e.g.* prompt weighting. If not
provided, text embeddings will be generated from `prompt` input argument.
negative_prompt_embeds (`torch.FloatTensor`, *optional*):
Pre-generated negative text embeddings. Can be used to easily tweak text inputs, *e.g.* prompt
weighting. If not provided, negative_prompt_embeds will be generated from `negative_prompt` input
argument.
lora_scale (`float`, *optional*):
A LoRA scale that will be applied to all LoRA layers of the text encoder if LoRA layers are loaded.
clip_skip (`int`, *optional*):
Number of layers to be skipped from CLIP while computing the prompt embeddings. A value of 1 means that
the output of the pre-final layer will be used for computing the prompt embeddings.
"""
# set lora scale so that monkey patched LoRA
# function of text encoder can correctly access it
if lora_scale is not None and isinstance(self, LoraLoaderMixin):
self._lora_scale = lora_scale
# dynamically adjust the LoRA scale
if not USE_PEFT_BACKEND:
adjust_lora_scale_text_encoder(self.text_encoder, lora_scale)
else:
scale_lora_layers(self.text_encoder, lora_scale)
if prompt is not None and isinstance(prompt, str):
batch_size = 1
elif prompt is not None and isinstance(prompt, list):
batch_size = len(prompt)
else:
batch_size = prompt_embeds.shape[0]
if prompt_embeds is None:
# textual inversion: procecss multi-vector tokens if necessary
if isinstance(self, TextualInversionLoaderMixin):
prompt = self.maybe_convert_prompt(prompt, self.tokenizer)
text_inputs = self.tokenizer(
prompt,
padding="max_length",
max_length=self.tokenizer.model_max_length,
truncation=True,
return_tensors="pt",
)
text_input_ids = text_inputs.input_ids
untruncated_ids = self.tokenizer(prompt, padding="longest", return_tensors="pt").input_ids
if untruncated_ids.shape[-1] >= text_input_ids.shape[-1] and not torch.equal(
text_input_ids, untruncated_ids
):
removed_text = self.tokenizer.batch_decode(
untruncated_ids[:, self.tokenizer.model_max_length - 1 : -1]
)
logger.warning(
"The following part of your input was truncated because CLIP can only handle sequences up to"
f" {self.tokenizer.model_max_length} tokens: {removed_text}"
)
if hasattr(self.text_encoder.config, "use_attention_mask") and self.text_encoder.config.use_attention_mask:
attention_mask = text_inputs.attention_mask.to(device)
else:
attention_mask = None
if clip_skip is None:
prompt_embeds = self.text_encoder(text_input_ids.to(device), attention_mask=attention_mask)
prompt_embeds = prompt_embeds[0]
else:
prompt_embeds = self.text_encoder(
text_input_ids.to(device), attention_mask=attention_mask, output_hidden_states=True
)
# Access the `hidden_states` first, that contains a tuple of
# all the hidden states from the encoder layers. Then index into
# the tuple to access the hidden states from the desired layer.
prompt_embeds = prompt_embeds[-1][-(clip_skip + 1)]
# We also need to apply the final LayerNorm here to not mess with the
# representations. The `last_hidden_states` that we typically use for
# obtaining the final prompt representations passes through the LayerNorm
# layer.
prompt_embeds = self.text_encoder.text_model.final_layer_norm(prompt_embeds)
if self.text_encoder is not None:
prompt_embeds_dtype = self.text_encoder.dtype
elif self.unet is not None:
prompt_embeds_dtype = self.unet.dtype
else:
prompt_embeds_dtype = prompt_embeds.dtype
prompt_embeds = prompt_embeds.to(dtype=prompt_embeds_dtype, device=device)
bs_embed, seq_len, _ = prompt_embeds.shape
# duplicate text embeddings for each generation per prompt, using mps friendly method
prompt_embeds = prompt_embeds.repeat(1, num_images_per_prompt, 1)
prompt_embeds = prompt_embeds.view(bs_embed * num_images_per_prompt, seq_len, -1)
# get unconditional embeddings for classifier free guidance
if do_classifier_free_guidance and negative_prompt_embeds is None:
uncond_tokens: List[str]
if negative_prompt is None:
uncond_tokens = [""] * batch_size
elif prompt is not None and type(prompt) is not type(negative_prompt):
raise TypeError(
f"`negative_prompt` should be the same type to `prompt`, but got {type(negative_prompt)} !="
f" {type(prompt)}."
)
elif isinstance(negative_prompt, str):
uncond_tokens = [negative_prompt]
elif batch_size != len(negative_prompt):
raise ValueError(
f"`negative_prompt`: {negative_prompt} has batch size {len(negative_prompt)}, but `prompt`:"
f" {prompt} has batch size {batch_size}. Please make sure that passed `negative_prompt` matches"
" the batch size of `prompt`."
)
else:
uncond_tokens = negative_prompt
# textual inversion: procecss multi-vector tokens if necessary
if isinstance(self, TextualInversionLoaderMixin):
uncond_tokens = self.maybe_convert_prompt(uncond_tokens, self.tokenizer)
max_length = prompt_embeds.shape[1]
uncond_input = self.tokenizer(
uncond_tokens,
padding="max_length",
max_length=max_length,
truncation=True,
return_tensors="pt",
)
if hasattr(self.text_encoder.config, "use_attention_mask") and self.text_encoder.config.use_attention_mask:
attention_mask = uncond_input.attention_mask.to(device)
else:
attention_mask = None
negative_prompt_embeds = self.text_encoder(
uncond_input.input_ids.to(device),
attention_mask=attention_mask,
)
negative_prompt_embeds = negative_prompt_embeds[0]
if do_classifier_free_guidance:
# duplicate unconditional embeddings for each generation per prompt, using mps friendly method
seq_len = negative_prompt_embeds.shape[1]
negative_prompt_embeds = negative_prompt_embeds.to(dtype=prompt_embeds_dtype, device=device)
negative_prompt_embeds = negative_prompt_embeds.repeat(1, num_images_per_prompt, 1)
negative_prompt_embeds = negative_prompt_embeds.view(batch_size * num_images_per_prompt, seq_len, -1)
if isinstance(self, LoraLoaderMixin) and USE_PEFT_BACKEND:
# Retrieve the original scale by scaling back the LoRA layers
unscale_lora_layers(self.text_encoder, lora_scale)
return prompt_embeds, negative_prompt_embeds
def run_safety_checker(self, image, device, dtype):
if self.safety_checker is None:
has_nsfw_concept = None
else:
if torch.is_tensor(image):
feature_extractor_input = self.image_processor.postprocess(image, output_type="pil")
else:
feature_extractor_input = self.image_processor.numpy_to_pil(image)
rgb_feature_extractor_input = feature_extractor_input[0]
safety_checker_input = self.feature_extractor(rgb_feature_extractor_input, return_tensors="pt").to(device)
image, has_nsfw_concept = self.safety_checker(
images=image, clip_input=safety_checker_input.pixel_values.to(dtype)
)
return image, has_nsfw_concept
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion.StableDiffusionPipeline.prepare_extra_step_kwargs
def prepare_extra_step_kwargs(self, generator, eta):
# prepare extra kwargs for the scheduler step, since not all schedulers have the same signature
# eta (η) is only used with the DDIMScheduler, it will be ignored for other schedulers.
# eta corresponds to η in DDIM paper: https://arxiv.org/abs/2010.02502
# and should be between [0, 1]
accepts_eta = "eta" in set(inspect.signature(self.scheduler.step).parameters.keys())
extra_step_kwargs = {}
if accepts_eta:
extra_step_kwargs["eta"] = eta
# check if the scheduler accepts generator
accepts_generator = "generator" in set(inspect.signature(self.scheduler.step).parameters.keys())
if accepts_generator:
extra_step_kwargs["generator"] = generator
return extra_step_kwargs
def check_inputs(
self,
prompt,
image,
noise_level,
callback_steps,
negative_prompt=None,
prompt_embeds=None,
negative_prompt_embeds=None,
target_res=None,
):
if (callback_steps is None) or (
callback_steps is not None and (not isinstance(callback_steps, int) or callback_steps <= 0)
):
raise ValueError(
f"`callback_steps` has to be a positive integer but is {callback_steps} of type"
f" {type(callback_steps)}."
)
if prompt is not None and prompt_embeds is not None:
raise ValueError(
f"Cannot forward both `prompt`: {prompt} and `prompt_embeds`: {prompt_embeds}. Please make sure to"
" only forward one of the two."
)
elif prompt is None and prompt_embeds is None:
raise ValueError(
"Provide either `prompt` or `prompt_embeds`. Cannot leave both `prompt` and `prompt_embeds` undefined."
)
elif prompt is not None and (not isinstance(prompt, str) and not isinstance(prompt, list)):
raise ValueError(f"`prompt` has to be of type `str` or `list` but is {type(prompt)}")
if negative_prompt is not None and negative_prompt_embeds is not None:
raise ValueError(
f"Cannot forward both `negative_prompt`: {negative_prompt} and `negative_prompt_embeds`:"
f" {negative_prompt_embeds}. Please make sure to only forward one of the two."
)
if prompt_embeds is not None and negative_prompt_embeds is not None:
if prompt_embeds.shape != negative_prompt_embeds.shape:
raise ValueError(
"`prompt_embeds` and `negative_prompt_embeds` must have the same shape when passed directly, but"
f" got: `prompt_embeds` {prompt_embeds.shape} != `negative_prompt_embeds`"
f" {negative_prompt_embeds.shape}."
)
if (
not isinstance(image, torch.Tensor)
and not isinstance(image, PIL.Image.Image)
and not isinstance(image, np.ndarray)
and not isinstance(image, list)
):
raise ValueError(
f"`image` has to be of type `torch.Tensor`, `np.ndarray`, `PIL.Image.Image` or `list` but is {type(image)}"
)
# verify batch size of prompt and image are same if image is a list or tensor or numpy array
if isinstance(image, list) or isinstance(image, torch.Tensor) or isinstance(image, np.ndarray):
if prompt is not None and isinstance(prompt, str):
batch_size = 1
elif prompt is not None and isinstance(prompt, list):
batch_size = len(prompt)
else:
batch_size = prompt_embeds.shape[0]
if isinstance(image, list):
image_batch_size = len(image)
else:
image_batch_size = image.shape[0]
if batch_size != image_batch_size:
raise ValueError(
f"`prompt` has batch size {batch_size} and `image` has batch size {image_batch_size}."
" Please make sure that passed `prompt` matches the batch size of `image`."
)
# check noise level
if noise_level > self.config.max_noise_level:
raise ValueError(f"`noise_level` has to be <= {self.config.max_noise_level} but is {noise_level}")
if (callback_steps is None) or (
callback_steps is not None and (not isinstance(callback_steps, int) or callback_steps <= 0)
):
raise ValueError(
f"`callback_steps` has to be a positive integer but is {callback_steps} of type"
f" {type(callback_steps)}."
)
def prepare_latents(self, batch_size, num_channels_latents, height, width, dtype, device, generator, latents=None):
shape = (batch_size, num_channels_latents, height, width)
if latents is None:
latents = randn_tensor(shape, generator=generator, device=device, dtype=dtype)
else:
if latents.shape != shape:
raise ValueError(f"Unexpected latents shape, got {latents.shape}, expected {shape}")
latents = latents.to(device)
# scale the initial noise by the standard deviation required by the scheduler
latents = latents * self.scheduler.init_noise_sigma
return latents
# def upcast_vae(self):
# dtype = self.vae.dtype
# self.vae.to(dtype=torch.float32)
# use_torch_2_0_or_xformers = isinstance(
# self.vae.decoder.mid_block.attentions[0].processor,
# (
# AttnProcessor2_0,
# XFormersAttnProcessor,
# LoRAXFormersAttnProcessor,
# LoRAAttnProcessor2_0,
# ),
# )
# # if xformers or torch_2_0 is used attention block does not need
# # to be in float32 which can save lots of memory
# if use_torch_2_0_or_xformers:
# self.vae.post_quant_conv.to(dtype)
# self.vae.decoder.conv_in.to(dtype)
# self.vae.decoder.mid_block.to(dtype)
@torch.no_grad()
def __call__(
self,
prompt: Union[str, List[str]] = None,
rgb: PipelineImageInput = None,
depth: PipelineDepthInput = None,
num_inference_steps: int = 75,
guidance_scale: float = 9.0,
noise_level: int = 20,
negative_prompt: Optional[Union[str, List[str]]] = None,
num_images_per_prompt: Optional[int] = 1,
eta: float = 0.0,
generator: Optional[Union[torch.Generator, List[torch.Generator]]] = None,
latents: Optional[torch.FloatTensor] = None,
prompt_embeds: Optional[torch.FloatTensor] = None,
negative_prompt_embeds: Optional[torch.FloatTensor] = None,
output_type: Optional[str] = "pil",
return_dict: bool = True,
callback: Optional[Callable[[int, int, torch.FloatTensor], None]] = None,
callback_steps: int = 1,
cross_attention_kwargs: Optional[Dict[str, Any]] = None,
target_res: Optional[List[int]] = [1024, 1024],
):
r"""
The call function to the pipeline for generation.
Args:
prompt (`str` or `List[str]`, *optional*):
The prompt or prompts to guide image generation. If not defined, you need to pass `prompt_embeds`.
image (`torch.FloatTensor`, `PIL.Image.Image`, `np.ndarray`, `List[torch.FloatTensor]`, `List[PIL.Image.Image]`, or `List[np.ndarray]`):
`Image` or tensor representing an image batch to be upscaled.
num_inference_steps (`int`, *optional*, defaults to 50):
The number of denoising steps. More denoising steps usually lead to a higher quality image at the
expense of slower inference.
guidance_scale (`float`, *optional*, defaults to 5.0):
A higher guidance scale value encourages the model to generate images closely linked to the text
`prompt` at the expense of lower image quality. Guidance scale is enabled when `guidance_scale > 1`.
negative_prompt (`str` or `List[str]`, *optional*):
The prompt or prompts to guide what to not include in image generation. If not defined, you need to
pass `negative_prompt_embeds` instead. Ignored when not using guidance (`guidance_scale < 1`).
num_images_per_prompt (`int`, *optional*, defaults to 1):
The number of images to generate per prompt.
eta (`float`, *optional*, defaults to 0.0):
Corresponds to parameter eta (η) from the [DDIM](https://arxiv.org/abs/2010.02502) paper. Only applies
to the [`~schedulers.DDIMScheduler`], and is ignored in other schedulers.
generator (`torch.Generator` or `List[torch.Generator]`, *optional*):
A [`torch.Generator`](https://pytorch.org/docs/stable/generated/torch.Generator.html) to make
generation deterministic.
latents (`torch.FloatTensor`, *optional*):
Pre-generated noisy latents sampled from a Gaussian distribution, to be used as inputs for image
generation. Can be used to tweak the same generation with different prompts. If not provided, a latents
tensor is generated by sampling using the supplied random `generator`.
prompt_embeds (`torch.FloatTensor`, *optional*):
Pre-generated text embeddings. Can be used to easily tweak text inputs (prompt weighting). If not
provided, text embeddings are generated from the `prompt` input argument.
negative_prompt_embeds (`torch.FloatTensor`, *optional*):
Pre-generated negative text embeddings. Can be used to easily tweak text inputs (prompt weighting). If
not provided, `negative_prompt_embeds` are generated from the `negative_prompt` input argument.
output_type (`str`, *optional*, defaults to `"pil"`):
The output format of the generated image. Choose between `PIL.Image` or `np.array`.
return_dict (`bool`, *optional*, defaults to `True`):
Whether or not to return a [`~pipelines.stable_diffusion.StableDiffusionPipelineOutput`] instead of a
plain tuple.
callback (`Callable`, *optional*):
A function that calls every `callback_steps` steps during inference. The function is called with the
following arguments: `callback(step: int, timestep: int, latents: torch.FloatTensor)`.
callback_steps (`int`, *optional*, defaults to 1):
The frequency at which the `callback` function is called. If not specified, the callback is called at
every step.
cross_attention_kwargs (`dict`, *optional*):
A kwargs dictionary that if specified is passed along to the [`AttentionProcessor`] as defined in
[`self.processor`](https://github.com/huggingface/diffusers/blob/main/src/diffusers/models/attention_processor.py).
Examples:
Returns:
[`~pipelines.stable_diffusion.StableDiffusionPipelineOutput`] or `tuple`:
If `return_dict` is `True`, [`~pipelines.stable_diffusion.StableDiffusionPipelineOutput`] is returned,
otherwise a `tuple` is returned where the first element is a list with the generated images and the
second element is a list of `bool`s indicating whether the corresponding generated image contains
"not-safe-for-work" (nsfw) content.
"""
# 1. Check inputs. Raise error if not correct
self.check_inputs(
prompt,
rgb,
noise_level,
callback_steps,
negative_prompt,
prompt_embeds,
negative_prompt_embeds,
)
# 2. Define call parameters
if prompt is not None and isinstance(prompt, str):
batch_size = 1
elif prompt is not None and isinstance(prompt, list):
batch_size = len(prompt)
else:
batch_size = prompt_embeds.shape[0]
device = self._execution_device
# here `guidance_scale` is defined analog to the guidance weight `w` of equation (2)
# of the Imagen paper: https://arxiv.org/pdf/2205.11487.pdf . `guidance_scale = 1`
# corresponds to doing no classifier free guidance.
do_classifier_free_guidance = guidance_scale > 1.0
# 3. Encode input prompt
prompt_embeds, negative_prompt_embeds = self.encode_prompt(
prompt,
device,
num_images_per_prompt,
do_classifier_free_guidance,
negative_prompt,
prompt_embeds=prompt_embeds,
negative_prompt_embeds=negative_prompt_embeds,
)
# For classifier free guidance, we need to do two forward passes.
# Here we concatenate the unconditional and text embeddings into a single batch
# to avoid doing two forward passes
if do_classifier_free_guidance:
prompt_embeds = torch.cat([negative_prompt_embeds, prompt_embeds])
# 4. Preprocess image
rgb, depth = self.image_processor.preprocess(rgb, depth, target_res=target_res)
rgb = rgb.to(dtype=prompt_embeds.dtype, device=device)
depth = depth.to(dtype=prompt_embeds.dtype, device=device)
# 5. set timesteps
self.scheduler.set_timesteps(num_inference_steps, device=device)
timesteps = self.scheduler.timesteps
# 6. Encode low resolutiom image to latent space
image = torch.cat([rgb, depth], axis=1)
latent_space_image = self.vae.encode(image).latent_dist.sample(generator)
latent_space_image *= self.vae.scaling_factor
noise_level = torch.tensor([noise_level], dtype=torch.long, device=device)
# noise_rgb = randn_tensor(rgb.shape, generator=generator, device=device, dtype=prompt_embeds.dtype)
# rgb = self.low_res_scheduler.add_noise(rgb, noise_rgb, noise_level)
# noise_depth = randn_tensor(depth.shape, generator=generator, device=device, dtype=prompt_embeds.dtype)
# depth = self.low_res_scheduler.add_noise(depth, noise_depth, noise_level)
batch_multiplier = 2 if do_classifier_free_guidance else 1
latent_space_image = torch.cat([latent_space_image] * batch_multiplier * num_images_per_prompt)
noise_level = torch.cat([noise_level] * latent_space_image.shape[0])
# 7. Prepare latent variables
height, width = latent_space_image.shape[2:]
num_channels_latents = self.vae.config.latent_channels
latents = self.prepare_latents(
batch_size * num_images_per_prompt,
num_channels_latents,
height,
width,
prompt_embeds.dtype,
device,
generator,
latents,
)
# 8. Check that sizes of image and latents match
num_channels_image = latent_space_image.shape[1]
if num_channels_latents + num_channels_image != self.unet.config.in_channels:
raise ValueError(
f"Incorrect configuration settings! The config of `pipeline.unet`: {self.unet.config} expects"
f" {self.unet.config.in_channels} but received `num_channels_latents`: {num_channels_latents} +"
f" `num_channels_image`: {num_channels_image} "
f" = {num_channels_latents+num_channels_image}. Please verify the config of"
" `pipeline.unet` or your `image` input."
)
# 9. Prepare extra step kwargs. TODO: Logic should ideally just be moved out of the pipeline
extra_step_kwargs = self.prepare_extra_step_kwargs(generator, eta)
# 10. Denoising loop
num_warmup_steps = len(timesteps) - num_inference_steps * self.scheduler.order
with self.progress_bar(total=num_inference_steps) as progress_bar:
for i, t in enumerate(timesteps):
# expand the latents if we are doing classifier free guidance
latent_model_input = torch.cat([latents] * 2) if do_classifier_free_guidance else latents
# concat latents, mask, masked_image_latents in the channel dimension
latent_model_input = self.scheduler.scale_model_input(latent_model_input, t)
latent_model_input = torch.cat([latent_model_input, latent_space_image], dim=1)
# predict the noise residual
noise_pred = self.unet(
latent_model_input,
t,
encoder_hidden_states=prompt_embeds,
cross_attention_kwargs=cross_attention_kwargs,
class_labels=noise_level,
return_dict=False,
)[0]
# perform guidance
if do_classifier_free_guidance:
noise_pred_uncond, noise_pred_text = noise_pred.chunk(2)
noise_pred = noise_pred_uncond + guidance_scale * (noise_pred_text - noise_pred_uncond)
# compute the previous noisy sample x_t -> x_t-1
latents = self.scheduler.step(noise_pred, t, latents, **extra_step_kwargs, return_dict=False)[0]
# call the callback, if provided
if i == len(timesteps) - 1 or ((i + 1) > num_warmup_steps and (i + 1) % self.scheduler.order == 0):
progress_bar.update()
if callback is not None and i % callback_steps == 0:
callback(i, t, latents)
if not output_type == "latent":
# make sure the VAE is in float32 mode, as it overflows in float16
needs_upcasting = self.vae.dtype == torch.float16 and self.vae.config.force_upcast
if needs_upcasting:
self.upcast_vae()
latents = latents.to(next(iter(self.vae.post_quant_conv.parameters())).dtype)
image = self.vae.decode(latents / self.vae.scaling_factor, return_dict=False)[0]
# cast back to fp16 if needed
if needs_upcasting:
self.vae.to(dtype=torch.float16)
image, has_nsfw_concept = self.run_safety_checker(image, device, prompt_embeds.dtype)
else:
image = latents
has_nsfw_concept = None
if has_nsfw_concept is None:
do_denormalize = [True] * image.shape[0]
else:
do_denormalize = [not has_nsfw for has_nsfw in has_nsfw_concept]
rgb, depth = self.image_processor.postprocess(image, output_type=output_type, do_denormalize=do_denormalize)
# 11. Apply watermark
if output_type == "pil" and self.watermarker is not None:
rgb = self.watermarker.apply_watermark(rgb)
# Offload last model to CPU
if hasattr(self, "final_offload_hook") and self.final_offload_hook is not None:
self.final_offload_hook.offload()
if not return_dict:
return ((rgb, depth), has_nsfw_concept)
return LDM3DPipelineOutput(rgb=rgb, depth=depth, nsfw_content_detected=has_nsfw_concept)
| diffusers/examples/community/pipeline_stable_diffusion_upscale_ldm3d.py/0 | {
"file_path": "diffusers/examples/community/pipeline_stable_diffusion_upscale_ldm3d.py",
"repo_id": "diffusers",
"token_count": 17035
} | 92 |
# Inspired by: https://github.com/haofanwang/ControlNet-for-Diffusers/
import inspect
from typing import Any, Callable, Dict, List, Optional, Tuple, Union
import numpy as np
import PIL.Image
import torch
import torch.nn.functional as F
from transformers import CLIPImageProcessor, CLIPTextModel, CLIPTokenizer
from diffusers import AutoencoderKL, ControlNetModel, DiffusionPipeline, UNet2DConditionModel, logging
from diffusers.pipelines.controlnet.multicontrolnet import MultiControlNetModel
from diffusers.pipelines.stable_diffusion import StableDiffusionPipelineOutput, StableDiffusionSafetyChecker
from diffusers.schedulers import KarrasDiffusionSchedulers
from diffusers.utils import (
PIL_INTERPOLATION,
is_accelerate_available,
is_accelerate_version,
replace_example_docstring,
)
from diffusers.utils.torch_utils import randn_tensor
logger = logging.get_logger(__name__) # pylint: disable=invalid-name
EXAMPLE_DOC_STRING = """
Examples:
```py
>>> import numpy as np
>>> import torch
>>> from PIL import Image
>>> from stable_diffusion_controlnet_inpaint import StableDiffusionControlNetInpaintPipeline
>>> from transformers import AutoImageProcessor, UperNetForSemanticSegmentation
>>> from diffusers import ControlNetModel, UniPCMultistepScheduler
>>> from diffusers.utils import load_image
>>> def ade_palette():
return [[120, 120, 120], [180, 120, 120], [6, 230, 230], [80, 50, 50],
[4, 200, 3], [120, 120, 80], [140, 140, 140], [204, 5, 255],
[230, 230, 230], [4, 250, 7], [224, 5, 255], [235, 255, 7],
[150, 5, 61], [120, 120, 70], [8, 255, 51], [255, 6, 82],
[143, 255, 140], [204, 255, 4], [255, 51, 7], [204, 70, 3],
[0, 102, 200], [61, 230, 250], [255, 6, 51], [11, 102, 255],
[255, 7, 71], [255, 9, 224], [9, 7, 230], [220, 220, 220],
[255, 9, 92], [112, 9, 255], [8, 255, 214], [7, 255, 224],
[255, 184, 6], [10, 255, 71], [255, 41, 10], [7, 255, 255],
[224, 255, 8], [102, 8, 255], [255, 61, 6], [255, 194, 7],
[255, 122, 8], [0, 255, 20], [255, 8, 41], [255, 5, 153],
[6, 51, 255], [235, 12, 255], [160, 150, 20], [0, 163, 255],
[140, 140, 140], [250, 10, 15], [20, 255, 0], [31, 255, 0],
[255, 31, 0], [255, 224, 0], [153, 255, 0], [0, 0, 255],
[255, 71, 0], [0, 235, 255], [0, 173, 255], [31, 0, 255],
[11, 200, 200], [255, 82, 0], [0, 255, 245], [0, 61, 255],
[0, 255, 112], [0, 255, 133], [255, 0, 0], [255, 163, 0],
[255, 102, 0], [194, 255, 0], [0, 143, 255], [51, 255, 0],
[0, 82, 255], [0, 255, 41], [0, 255, 173], [10, 0, 255],
[173, 255, 0], [0, 255, 153], [255, 92, 0], [255, 0, 255],
[255, 0, 245], [255, 0, 102], [255, 173, 0], [255, 0, 20],
[255, 184, 184], [0, 31, 255], [0, 255, 61], [0, 71, 255],
[255, 0, 204], [0, 255, 194], [0, 255, 82], [0, 10, 255],
[0, 112, 255], [51, 0, 255], [0, 194, 255], [0, 122, 255],
[0, 255, 163], [255, 153, 0], [0, 255, 10], [255, 112, 0],
[143, 255, 0], [82, 0, 255], [163, 255, 0], [255, 235, 0],
[8, 184, 170], [133, 0, 255], [0, 255, 92], [184, 0, 255],
[255, 0, 31], [0, 184, 255], [0, 214, 255], [255, 0, 112],
[92, 255, 0], [0, 224, 255], [112, 224, 255], [70, 184, 160],
[163, 0, 255], [153, 0, 255], [71, 255, 0], [255, 0, 163],
[255, 204, 0], [255, 0, 143], [0, 255, 235], [133, 255, 0],
[255, 0, 235], [245, 0, 255], [255, 0, 122], [255, 245, 0],
[10, 190, 212], [214, 255, 0], [0, 204, 255], [20, 0, 255],
[255, 255, 0], [0, 153, 255], [0, 41, 255], [0, 255, 204],
[41, 0, 255], [41, 255, 0], [173, 0, 255], [0, 245, 255],
[71, 0, 255], [122, 0, 255], [0, 255, 184], [0, 92, 255],
[184, 255, 0], [0, 133, 255], [255, 214, 0], [25, 194, 194],
[102, 255, 0], [92, 0, 255]]
>>> image_processor = AutoImageProcessor.from_pretrained("openmmlab/upernet-convnext-small")
>>> image_segmentor = UperNetForSemanticSegmentation.from_pretrained("openmmlab/upernet-convnext-small")
>>> controlnet = ControlNetModel.from_pretrained("lllyasviel/sd-controlnet-seg", torch_dtype=torch.float16)
>>> pipe = StableDiffusionControlNetInpaintPipeline.from_pretrained(
"runwayml/stable-diffusion-inpainting", controlnet=controlnet, safety_checker=None, torch_dtype=torch.float16
)
>>> pipe.scheduler = UniPCMultistepScheduler.from_config(pipe.scheduler.config)
>>> pipe.enable_xformers_memory_efficient_attention()
>>> pipe.enable_model_cpu_offload()
>>> def image_to_seg(image):
pixel_values = image_processor(image, return_tensors="pt").pixel_values
with torch.no_grad():
outputs = image_segmentor(pixel_values)
seg = image_processor.post_process_semantic_segmentation(outputs, target_sizes=[image.size[::-1]])[0]
color_seg = np.zeros((seg.shape[0], seg.shape[1], 3), dtype=np.uint8) # height, width, 3
palette = np.array(ade_palette())
for label, color in enumerate(palette):
color_seg[seg == label, :] = color
color_seg = color_seg.astype(np.uint8)
seg_image = Image.fromarray(color_seg)
return seg_image
>>> image = load_image(
"https://github.com/CompVis/latent-diffusion/raw/main/data/inpainting_examples/overture-creations-5sI6fQgYIuo.png"
)
>>> mask_image = load_image(
"https://github.com/CompVis/latent-diffusion/raw/main/data/inpainting_examples/overture-creations-5sI6fQgYIuo_mask.png"
)
>>> controlnet_conditioning_image = image_to_seg(image)
>>> image = pipe(
"Face of a yellow cat, high resolution, sitting on a park bench",
image,
mask_image,
controlnet_conditioning_image,
num_inference_steps=20,
).images[0]
>>> image.save("out.png")
```
"""
def prepare_image(image):
if isinstance(image, torch.Tensor):
# Batch single image
if image.ndim == 3:
image = image.unsqueeze(0)
image = image.to(dtype=torch.float32)
else:
# preprocess image
if isinstance(image, (PIL.Image.Image, np.ndarray)):
image = [image]
if isinstance(image, list) and isinstance(image[0], PIL.Image.Image):
image = [np.array(i.convert("RGB"))[None, :] for i in image]
image = np.concatenate(image, axis=0)
elif isinstance(image, list) and isinstance(image[0], np.ndarray):
image = np.concatenate([i[None, :] for i in image], axis=0)
image = image.transpose(0, 3, 1, 2)
image = torch.from_numpy(image).to(dtype=torch.float32) / 127.5 - 1.0
return image
def prepare_mask_image(mask_image):
if isinstance(mask_image, torch.Tensor):
if mask_image.ndim == 2:
# Batch and add channel dim for single mask
mask_image = mask_image.unsqueeze(0).unsqueeze(0)
elif mask_image.ndim == 3 and mask_image.shape[0] == 1:
# Single mask, the 0'th dimension is considered to be
# the existing batch size of 1
mask_image = mask_image.unsqueeze(0)
elif mask_image.ndim == 3 and mask_image.shape[0] != 1:
# Batch of mask, the 0'th dimension is considered to be
# the batching dimension
mask_image = mask_image.unsqueeze(1)
# Binarize mask
mask_image[mask_image < 0.5] = 0
mask_image[mask_image >= 0.5] = 1
else:
# preprocess mask
if isinstance(mask_image, (PIL.Image.Image, np.ndarray)):
mask_image = [mask_image]
if isinstance(mask_image, list) and isinstance(mask_image[0], PIL.Image.Image):
mask_image = np.concatenate([np.array(m.convert("L"))[None, None, :] for m in mask_image], axis=0)
mask_image = mask_image.astype(np.float32) / 255.0
elif isinstance(mask_image, list) and isinstance(mask_image[0], np.ndarray):
mask_image = np.concatenate([m[None, None, :] for m in mask_image], axis=0)
mask_image[mask_image < 0.5] = 0
mask_image[mask_image >= 0.5] = 1
mask_image = torch.from_numpy(mask_image)
return mask_image
def prepare_controlnet_conditioning_image(
controlnet_conditioning_image,
width,
height,
batch_size,
num_images_per_prompt,
device,
dtype,
do_classifier_free_guidance,
):
if not isinstance(controlnet_conditioning_image, torch.Tensor):
if isinstance(controlnet_conditioning_image, PIL.Image.Image):
controlnet_conditioning_image = [controlnet_conditioning_image]
if isinstance(controlnet_conditioning_image[0], PIL.Image.Image):
controlnet_conditioning_image = [
np.array(i.resize((width, height), resample=PIL_INTERPOLATION["lanczos"]))[None, :]
for i in controlnet_conditioning_image
]
controlnet_conditioning_image = np.concatenate(controlnet_conditioning_image, axis=0)
controlnet_conditioning_image = np.array(controlnet_conditioning_image).astype(np.float32) / 255.0
controlnet_conditioning_image = controlnet_conditioning_image.transpose(0, 3, 1, 2)
controlnet_conditioning_image = torch.from_numpy(controlnet_conditioning_image)
elif isinstance(controlnet_conditioning_image[0], torch.Tensor):
controlnet_conditioning_image = torch.cat(controlnet_conditioning_image, dim=0)
image_batch_size = controlnet_conditioning_image.shape[0]
if image_batch_size == 1:
repeat_by = batch_size
else:
# image batch size is the same as prompt batch size
repeat_by = num_images_per_prompt
controlnet_conditioning_image = controlnet_conditioning_image.repeat_interleave(repeat_by, dim=0)
controlnet_conditioning_image = controlnet_conditioning_image.to(device=device, dtype=dtype)
if do_classifier_free_guidance:
controlnet_conditioning_image = torch.cat([controlnet_conditioning_image] * 2)
return controlnet_conditioning_image
class StableDiffusionControlNetInpaintPipeline(DiffusionPipeline):
"""
Inspired by: https://github.com/haofanwang/ControlNet-for-Diffusers/
"""
_optional_components = ["safety_checker", "feature_extractor"]
def __init__(
self,
vae: AutoencoderKL,
text_encoder: CLIPTextModel,
tokenizer: CLIPTokenizer,
unet: UNet2DConditionModel,
controlnet: Union[ControlNetModel, List[ControlNetModel], Tuple[ControlNetModel], MultiControlNetModel],
scheduler: KarrasDiffusionSchedulers,
safety_checker: StableDiffusionSafetyChecker,
feature_extractor: CLIPImageProcessor,
requires_safety_checker: bool = True,
):
super().__init__()
if safety_checker is None and requires_safety_checker:
logger.warning(
f"You have disabled the safety checker for {self.__class__} by passing `safety_checker=None`. Ensure"
" that you abide to the conditions of the Stable Diffusion license and do not expose unfiltered"
" results in services or applications open to the public. Both the diffusers team and Hugging Face"
" strongly recommend to keep the safety filter enabled in all public facing circumstances, disabling"
" it only for use-cases that involve analyzing network behavior or auditing its results. For more"
" information, please have a look at https://github.com/huggingface/diffusers/pull/254 ."
)
if safety_checker is not None and feature_extractor is None:
raise ValueError(
"Make sure to define a feature extractor when loading {self.__class__} if you want to use the safety"
" checker. If you do not want to use the safety checker, you can pass `'safety_checker=None'` instead."
)
if isinstance(controlnet, (list, tuple)):
controlnet = MultiControlNetModel(controlnet)
self.register_modules(
vae=vae,
text_encoder=text_encoder,
tokenizer=tokenizer,
unet=unet,
controlnet=controlnet,
scheduler=scheduler,
safety_checker=safety_checker,
feature_extractor=feature_extractor,
)
self.vae_scale_factor = 2 ** (len(self.vae.config.block_out_channels) - 1)
self.register_to_config(requires_safety_checker=requires_safety_checker)
def enable_vae_slicing(self):
r"""
Enable sliced VAE decoding.
When this option is enabled, the VAE will split the input tensor in slices to compute decoding in several
steps. This is useful to save some memory and allow larger batch sizes.
"""
self.vae.enable_slicing()
def disable_vae_slicing(self):
r"""
Disable sliced VAE decoding. If `enable_vae_slicing` was previously invoked, this method will go back to
computing decoding in one step.
"""
self.vae.disable_slicing()
def enable_sequential_cpu_offload(self, gpu_id=0):
r"""
Offloads all models to CPU using accelerate, significantly reducing memory usage. When called, unet,
text_encoder, vae, controlnet, and safety checker have their state dicts saved to CPU and then are moved to a
`torch.device('meta') and loaded to GPU only when their specific submodule has its `forward` method called.
Note that offloading happens on a submodule basis. Memory savings are higher than with
`enable_model_cpu_offload`, but performance is lower.
"""
if is_accelerate_available():
from accelerate import cpu_offload
else:
raise ImportError("Please install accelerate via `pip install accelerate`")
device = torch.device(f"cuda:{gpu_id}")
for cpu_offloaded_model in [self.unet, self.text_encoder, self.vae, self.controlnet]:
cpu_offload(cpu_offloaded_model, device)
if self.safety_checker is not None:
cpu_offload(self.safety_checker, execution_device=device, offload_buffers=True)
def enable_model_cpu_offload(self, gpu_id=0):
r"""
Offloads all models to CPU using accelerate, reducing memory usage with a low impact on performance. Compared
to `enable_sequential_cpu_offload`, this method moves one whole model at a time to the GPU when its `forward`
method is called, and the model remains in GPU until the next model runs. Memory savings are lower than with
`enable_sequential_cpu_offload`, but performance is much better due to the iterative execution of the `unet`.
"""
if is_accelerate_available() and is_accelerate_version(">=", "0.17.0.dev0"):
from accelerate import cpu_offload_with_hook
else:
raise ImportError("`enable_model_cpu_offload` requires `accelerate v0.17.0` or higher.")
device = torch.device(f"cuda:{gpu_id}")
hook = None
for cpu_offloaded_model in [self.text_encoder, self.unet, self.vae]:
_, hook = cpu_offload_with_hook(cpu_offloaded_model, device, prev_module_hook=hook)
if self.safety_checker is not None:
# the safety checker can offload the vae again
_, hook = cpu_offload_with_hook(self.safety_checker, device, prev_module_hook=hook)
# control net hook has be manually offloaded as it alternates with unet
cpu_offload_with_hook(self.controlnet, device)
# We'll offload the last model manually.
self.final_offload_hook = hook
@property
def _execution_device(self):
r"""
Returns the device on which the pipeline's models will be executed. After calling
`pipeline.enable_sequential_cpu_offload()` the execution device can only be inferred from Accelerate's module
hooks.
"""
if not hasattr(self.unet, "_hf_hook"):
return self.device
for module in self.unet.modules():
if (
hasattr(module, "_hf_hook")
and hasattr(module._hf_hook, "execution_device")
and module._hf_hook.execution_device is not None
):
return torch.device(module._hf_hook.execution_device)
return self.device
def _encode_prompt(
self,
prompt,
device,
num_images_per_prompt,
do_classifier_free_guidance,
negative_prompt=None,
prompt_embeds: Optional[torch.FloatTensor] = None,
negative_prompt_embeds: Optional[torch.FloatTensor] = None,
):
r"""
Encodes the prompt into text encoder hidden states.
Args:
prompt (`str` or `List[str]`, *optional*):
prompt to be encoded
device: (`torch.device`):
torch device
num_images_per_prompt (`int`):
number of images that should be generated per prompt
do_classifier_free_guidance (`bool`):
whether to use classifier free guidance or not
negative_prompt (`str` or `List[str]`, *optional*):
The prompt or prompts not to guide the image generation. If not defined, one has to pass `negative_prompt_embeds` instead.
Ignored when not using guidance (i.e., ignored if `guidance_scale` is less than `1`).
prompt_embeds (`torch.FloatTensor`, *optional*):
Pre-generated text embeddings. Can be used to easily tweak text inputs, *e.g.* prompt weighting. If not
provided, text embeddings will be generated from `prompt` input argument.
negative_prompt_embeds (`torch.FloatTensor`, *optional*):
Pre-generated negative text embeddings. Can be used to easily tweak text inputs, *e.g.* prompt
weighting. If not provided, negative_prompt_embeds will be generated from `negative_prompt` input
argument.
"""
if prompt is not None and isinstance(prompt, str):
batch_size = 1
elif prompt is not None and isinstance(prompt, list):
batch_size = len(prompt)
else:
batch_size = prompt_embeds.shape[0]
if prompt_embeds is None:
text_inputs = self.tokenizer(
prompt,
padding="max_length",
max_length=self.tokenizer.model_max_length,
truncation=True,
return_tensors="pt",
)
text_input_ids = text_inputs.input_ids
untruncated_ids = self.tokenizer(prompt, padding="longest", return_tensors="pt").input_ids
if untruncated_ids.shape[-1] >= text_input_ids.shape[-1] and not torch.equal(
text_input_ids, untruncated_ids
):
removed_text = self.tokenizer.batch_decode(
untruncated_ids[:, self.tokenizer.model_max_length - 1 : -1]
)
logger.warning(
"The following part of your input was truncated because CLIP can only handle sequences up to"
f" {self.tokenizer.model_max_length} tokens: {removed_text}"
)
if hasattr(self.text_encoder.config, "use_attention_mask") and self.text_encoder.config.use_attention_mask:
attention_mask = text_inputs.attention_mask.to(device)
else:
attention_mask = None
prompt_embeds = self.text_encoder(
text_input_ids.to(device),
attention_mask=attention_mask,
)
prompt_embeds = prompt_embeds[0]
prompt_embeds = prompt_embeds.to(dtype=self.text_encoder.dtype, device=device)
bs_embed, seq_len, _ = prompt_embeds.shape
# duplicate text embeddings for each generation per prompt, using mps friendly method
prompt_embeds = prompt_embeds.repeat(1, num_images_per_prompt, 1)
prompt_embeds = prompt_embeds.view(bs_embed * num_images_per_prompt, seq_len, -1)
# get unconditional embeddings for classifier free guidance
if do_classifier_free_guidance and negative_prompt_embeds is None:
uncond_tokens: List[str]
if negative_prompt is None:
uncond_tokens = [""] * batch_size
elif type(prompt) is not type(negative_prompt):
raise TypeError(
f"`negative_prompt` should be the same type to `prompt`, but got {type(negative_prompt)} !="
f" {type(prompt)}."
)
elif isinstance(negative_prompt, str):
uncond_tokens = [negative_prompt]
elif batch_size != len(negative_prompt):
raise ValueError(
f"`negative_prompt`: {negative_prompt} has batch size {len(negative_prompt)}, but `prompt`:"
f" {prompt} has batch size {batch_size}. Please make sure that passed `negative_prompt` matches"
" the batch size of `prompt`."
)
else:
uncond_tokens = negative_prompt
max_length = prompt_embeds.shape[1]
uncond_input = self.tokenizer(
uncond_tokens,
padding="max_length",
max_length=max_length,
truncation=True,
return_tensors="pt",
)
if hasattr(self.text_encoder.config, "use_attention_mask") and self.text_encoder.config.use_attention_mask:
attention_mask = uncond_input.attention_mask.to(device)
else:
attention_mask = None
negative_prompt_embeds = self.text_encoder(
uncond_input.input_ids.to(device),
attention_mask=attention_mask,
)
negative_prompt_embeds = negative_prompt_embeds[0]
if do_classifier_free_guidance:
# duplicate unconditional embeddings for each generation per prompt, using mps friendly method
seq_len = negative_prompt_embeds.shape[1]
negative_prompt_embeds = negative_prompt_embeds.to(dtype=self.text_encoder.dtype, device=device)
negative_prompt_embeds = negative_prompt_embeds.repeat(1, num_images_per_prompt, 1)
negative_prompt_embeds = negative_prompt_embeds.view(batch_size * num_images_per_prompt, seq_len, -1)
# For classifier free guidance, we need to do two forward passes.
# Here we concatenate the unconditional and text embeddings into a single batch
# to avoid doing two forward passes
prompt_embeds = torch.cat([negative_prompt_embeds, prompt_embeds])
return prompt_embeds
def run_safety_checker(self, image, device, dtype):
if self.safety_checker is not None:
safety_checker_input = self.feature_extractor(self.numpy_to_pil(image), return_tensors="pt").to(device)
image, has_nsfw_concept = self.safety_checker(
images=image, clip_input=safety_checker_input.pixel_values.to(dtype)
)
else:
has_nsfw_concept = None
return image, has_nsfw_concept
def decode_latents(self, latents):
latents = 1 / self.vae.config.scaling_factor * latents
image = self.vae.decode(latents).sample
image = (image / 2 + 0.5).clamp(0, 1)
# we always cast to float32 as this does not cause significant overhead and is compatible with bfloat16
image = image.cpu().permute(0, 2, 3, 1).float().numpy()
return image
def prepare_extra_step_kwargs(self, generator, eta):
# prepare extra kwargs for the scheduler step, since not all schedulers have the same signature
# eta (η) is only used with the DDIMScheduler, it will be ignored for other schedulers.
# eta corresponds to η in DDIM paper: https://arxiv.org/abs/2010.02502
# and should be between [0, 1]
accepts_eta = "eta" in set(inspect.signature(self.scheduler.step).parameters.keys())
extra_step_kwargs = {}
if accepts_eta:
extra_step_kwargs["eta"] = eta
# check if the scheduler accepts generator
accepts_generator = "generator" in set(inspect.signature(self.scheduler.step).parameters.keys())
if accepts_generator:
extra_step_kwargs["generator"] = generator
return extra_step_kwargs
def check_controlnet_conditioning_image(self, image, prompt, prompt_embeds):
image_is_pil = isinstance(image, PIL.Image.Image)
image_is_tensor = isinstance(image, torch.Tensor)
image_is_pil_list = isinstance(image, list) and isinstance(image[0], PIL.Image.Image)
image_is_tensor_list = isinstance(image, list) and isinstance(image[0], torch.Tensor)
if not image_is_pil and not image_is_tensor and not image_is_pil_list and not image_is_tensor_list:
raise TypeError(
"image must be passed and be one of PIL image, torch tensor, list of PIL images, or list of torch tensors"
)
if image_is_pil:
image_batch_size = 1
elif image_is_tensor:
image_batch_size = image.shape[0]
elif image_is_pil_list:
image_batch_size = len(image)
elif image_is_tensor_list:
image_batch_size = len(image)
else:
raise ValueError("controlnet condition image is not valid")
if prompt is not None and isinstance(prompt, str):
prompt_batch_size = 1
elif prompt is not None and isinstance(prompt, list):
prompt_batch_size = len(prompt)
elif prompt_embeds is not None:
prompt_batch_size = prompt_embeds.shape[0]
else:
raise ValueError("prompt or prompt_embeds are not valid")
if image_batch_size != 1 and image_batch_size != prompt_batch_size:
raise ValueError(
f"If image batch size is not 1, image batch size must be same as prompt batch size. image batch size: {image_batch_size}, prompt batch size: {prompt_batch_size}"
)
def check_inputs(
self,
prompt,
image,
mask_image,
controlnet_conditioning_image,
height,
width,
callback_steps,
negative_prompt=None,
prompt_embeds=None,
negative_prompt_embeds=None,
controlnet_conditioning_scale=None,
):
if height % 8 != 0 or width % 8 != 0:
raise ValueError(f"`height` and `width` have to be divisible by 8 but are {height} and {width}.")
if (callback_steps is None) or (
callback_steps is not None and (not isinstance(callback_steps, int) or callback_steps <= 0)
):
raise ValueError(
f"`callback_steps` has to be a positive integer but is {callback_steps} of type"
f" {type(callback_steps)}."
)
if prompt is not None and prompt_embeds is not None:
raise ValueError(
f"Cannot forward both `prompt`: {prompt} and `prompt_embeds`: {prompt_embeds}. Please make sure to"
" only forward one of the two."
)
elif prompt is None and prompt_embeds is None:
raise ValueError(
"Provide either `prompt` or `prompt_embeds`. Cannot leave both `prompt` and `prompt_embeds` undefined."
)
elif prompt is not None and (not isinstance(prompt, str) and not isinstance(prompt, list)):
raise ValueError(f"`prompt` has to be of type `str` or `list` but is {type(prompt)}")
if negative_prompt is not None and negative_prompt_embeds is not None:
raise ValueError(
f"Cannot forward both `negative_prompt`: {negative_prompt} and `negative_prompt_embeds`:"
f" {negative_prompt_embeds}. Please make sure to only forward one of the two."
)
if prompt_embeds is not None and negative_prompt_embeds is not None:
if prompt_embeds.shape != negative_prompt_embeds.shape:
raise ValueError(
"`prompt_embeds` and `negative_prompt_embeds` must have the same shape when passed directly, but"
f" got: `prompt_embeds` {prompt_embeds.shape} != `negative_prompt_embeds`"
f" {negative_prompt_embeds.shape}."
)
# check controlnet condition image
if isinstance(self.controlnet, ControlNetModel):
self.check_controlnet_conditioning_image(controlnet_conditioning_image, prompt, prompt_embeds)
elif isinstance(self.controlnet, MultiControlNetModel):
if not isinstance(controlnet_conditioning_image, list):
raise TypeError("For multiple controlnets: `image` must be type `list`")
if len(controlnet_conditioning_image) != len(self.controlnet.nets):
raise ValueError(
"For multiple controlnets: `image` must have the same length as the number of controlnets."
)
for image_ in controlnet_conditioning_image:
self.check_controlnet_conditioning_image(image_, prompt, prompt_embeds)
else:
assert False
# Check `controlnet_conditioning_scale`
if isinstance(self.controlnet, ControlNetModel):
if not isinstance(controlnet_conditioning_scale, float):
raise TypeError("For single controlnet: `controlnet_conditioning_scale` must be type `float`.")
elif isinstance(self.controlnet, MultiControlNetModel):
if isinstance(controlnet_conditioning_scale, list) and len(controlnet_conditioning_scale) != len(
self.controlnet.nets
):
raise ValueError(
"For multiple controlnets: When `controlnet_conditioning_scale` is specified as `list`, it must have"
" the same length as the number of controlnets"
)
else:
assert False
if isinstance(image, torch.Tensor) and not isinstance(mask_image, torch.Tensor):
raise TypeError("if `image` is a tensor, `mask_image` must also be a tensor")
if isinstance(image, PIL.Image.Image) and not isinstance(mask_image, PIL.Image.Image):
raise TypeError("if `image` is a PIL image, `mask_image` must also be a PIL image")
if isinstance(image, torch.Tensor):
if image.ndim != 3 and image.ndim != 4:
raise ValueError("`image` must have 3 or 4 dimensions")
if mask_image.ndim != 2 and mask_image.ndim != 3 and mask_image.ndim != 4:
raise ValueError("`mask_image` must have 2, 3, or 4 dimensions")
if image.ndim == 3:
image_batch_size = 1
image_channels, image_height, image_width = image.shape
elif image.ndim == 4:
image_batch_size, image_channels, image_height, image_width = image.shape
else:
assert False
if mask_image.ndim == 2:
mask_image_batch_size = 1
mask_image_channels = 1
mask_image_height, mask_image_width = mask_image.shape
elif mask_image.ndim == 3:
mask_image_channels = 1
mask_image_batch_size, mask_image_height, mask_image_width = mask_image.shape
elif mask_image.ndim == 4:
mask_image_batch_size, mask_image_channels, mask_image_height, mask_image_width = mask_image.shape
if image_channels != 3:
raise ValueError("`image` must have 3 channels")
if mask_image_channels != 1:
raise ValueError("`mask_image` must have 1 channel")
if image_batch_size != mask_image_batch_size:
raise ValueError("`image` and `mask_image` mush have the same batch sizes")
if image_height != mask_image_height or image_width != mask_image_width:
raise ValueError("`image` and `mask_image` must have the same height and width dimensions")
if image.min() < -1 or image.max() > 1:
raise ValueError("`image` should be in range [-1, 1]")
if mask_image.min() < 0 or mask_image.max() > 1:
raise ValueError("`mask_image` should be in range [0, 1]")
else:
mask_image_channels = 1
image_channels = 3
single_image_latent_channels = self.vae.config.latent_channels
total_latent_channels = single_image_latent_channels * 2 + mask_image_channels
if total_latent_channels != self.unet.config.in_channels:
raise ValueError(
f"The config of `pipeline.unet` expects {self.unet.config.in_channels} but received"
f" non inpainting latent channels: {single_image_latent_channels},"
f" mask channels: {mask_image_channels}, and masked image channels: {single_image_latent_channels}."
f" Please verify the config of `pipeline.unet` and the `mask_image` and `image` inputs."
)
def prepare_latents(self, batch_size, num_channels_latents, height, width, dtype, device, generator, latents=None):
shape = (batch_size, num_channels_latents, height // self.vae_scale_factor, width // self.vae_scale_factor)
if isinstance(generator, list) and len(generator) != batch_size:
raise ValueError(
f"You have passed a list of generators of length {len(generator)}, but requested an effective batch"
f" size of {batch_size}. Make sure the batch size matches the length of the generators."
)
if latents is None:
latents = randn_tensor(shape, generator=generator, device=device, dtype=dtype)
else:
latents = latents.to(device)
# scale the initial noise by the standard deviation required by the scheduler
latents = latents * self.scheduler.init_noise_sigma
return latents
def prepare_mask_latents(self, mask_image, batch_size, height, width, dtype, device, do_classifier_free_guidance):
# resize the mask to latents shape as we concatenate the mask to the latents
# we do that before converting to dtype to avoid breaking in case we're using cpu_offload
# and half precision
mask_image = F.interpolate(mask_image, size=(height // self.vae_scale_factor, width // self.vae_scale_factor))
mask_image = mask_image.to(device=device, dtype=dtype)
# duplicate mask for each generation per prompt, using mps friendly method
if mask_image.shape[0] < batch_size:
if not batch_size % mask_image.shape[0] == 0:
raise ValueError(
"The passed mask and the required batch size don't match. Masks are supposed to be duplicated to"
f" a total batch size of {batch_size}, but {mask_image.shape[0]} masks were passed. Make sure the number"
" of masks that you pass is divisible by the total requested batch size."
)
mask_image = mask_image.repeat(batch_size // mask_image.shape[0], 1, 1, 1)
mask_image = torch.cat([mask_image] * 2) if do_classifier_free_guidance else mask_image
mask_image_latents = mask_image
return mask_image_latents
def prepare_masked_image_latents(
self, masked_image, batch_size, height, width, dtype, device, generator, do_classifier_free_guidance
):
masked_image = masked_image.to(device=device, dtype=dtype)
# encode the mask image into latents space so we can concatenate it to the latents
if isinstance(generator, list):
masked_image_latents = [
self.vae.encode(masked_image[i : i + 1]).latent_dist.sample(generator=generator[i])
for i in range(batch_size)
]
masked_image_latents = torch.cat(masked_image_latents, dim=0)
else:
masked_image_latents = self.vae.encode(masked_image).latent_dist.sample(generator=generator)
masked_image_latents = self.vae.config.scaling_factor * masked_image_latents
# duplicate masked_image_latents for each generation per prompt, using mps friendly method
if masked_image_latents.shape[0] < batch_size:
if not batch_size % masked_image_latents.shape[0] == 0:
raise ValueError(
"The passed images and the required batch size don't match. Images are supposed to be duplicated"
f" to a total batch size of {batch_size}, but {masked_image_latents.shape[0]} images were passed."
" Make sure the number of images that you pass is divisible by the total requested batch size."
)
masked_image_latents = masked_image_latents.repeat(batch_size // masked_image_latents.shape[0], 1, 1, 1)
masked_image_latents = (
torch.cat([masked_image_latents] * 2) if do_classifier_free_guidance else masked_image_latents
)
# aligning device to prevent device errors when concating it with the latent model input
masked_image_latents = masked_image_latents.to(device=device, dtype=dtype)
return masked_image_latents
def _default_height_width(self, height, width, image):
if isinstance(image, list):
image = image[0]
if height is None:
if isinstance(image, PIL.Image.Image):
height = image.height
elif isinstance(image, torch.Tensor):
height = image.shape[3]
height = (height // 8) * 8 # round down to nearest multiple of 8
if width is None:
if isinstance(image, PIL.Image.Image):
width = image.width
elif isinstance(image, torch.Tensor):
width = image.shape[2]
width = (width // 8) * 8 # round down to nearest multiple of 8
return height, width
@torch.no_grad()
@replace_example_docstring(EXAMPLE_DOC_STRING)
def __call__(
self,
prompt: Union[str, List[str]] = None,
image: Union[torch.Tensor, PIL.Image.Image] = None,
mask_image: Union[torch.Tensor, PIL.Image.Image] = None,
controlnet_conditioning_image: Union[
torch.FloatTensor, PIL.Image.Image, List[torch.FloatTensor], List[PIL.Image.Image]
] = None,
height: Optional[int] = None,
width: Optional[int] = None,
num_inference_steps: int = 50,
guidance_scale: float = 7.5,
negative_prompt: Optional[Union[str, List[str]]] = None,
num_images_per_prompt: Optional[int] = 1,
eta: float = 0.0,
generator: Optional[Union[torch.Generator, List[torch.Generator]]] = None,
latents: Optional[torch.FloatTensor] = None,
prompt_embeds: Optional[torch.FloatTensor] = None,
negative_prompt_embeds: Optional[torch.FloatTensor] = None,
output_type: Optional[str] = "pil",
return_dict: bool = True,
callback: Optional[Callable[[int, int, torch.FloatTensor], None]] = None,
callback_steps: int = 1,
cross_attention_kwargs: Optional[Dict[str, Any]] = None,
controlnet_conditioning_scale: Union[float, List[float]] = 1.0,
):
r"""
Function invoked when calling the pipeline for generation.
Args:
prompt (`str` or `List[str]`, *optional*):
The prompt or prompts to guide the image generation. If not defined, one has to pass `prompt_embeds`.
instead.
image (`torch.Tensor` or `PIL.Image.Image`):
`Image`, or tensor representing an image batch which will be inpainted, *i.e.* parts of the image will
be masked out with `mask_image` and repainted according to `prompt`.
mask_image (`torch.Tensor` or `PIL.Image.Image`):
`Image`, or tensor representing an image batch, to mask `image`. White pixels in the mask will be
repainted, while black pixels will be preserved. If `mask_image` is a PIL image, it will be converted
to a single channel (luminance) before use. If it's a tensor, it should contain one color channel (L)
instead of 3, so the expected shape would be `(B, H, W, 1)`.
controlnet_conditioning_image (`torch.FloatTensor`, `PIL.Image.Image`, `List[torch.FloatTensor]` or `List[PIL.Image.Image]`):
The ControlNet input condition. ControlNet uses this input condition to generate guidance to Unet. If
the type is specified as `Torch.FloatTensor`, it is passed to ControlNet as is. PIL.Image.Image` can
also be accepted as an image. The control image is automatically resized to fit the output image.
height (`int`, *optional*, defaults to self.unet.config.sample_size * self.vae_scale_factor):
The height in pixels of the generated image.
width (`int`, *optional*, defaults to self.unet.config.sample_size * self.vae_scale_factor):
The width in pixels of the generated image.
num_inference_steps (`int`, *optional*, defaults to 50):
The number of denoising steps. More denoising steps usually lead to a higher quality image at the
expense of slower inference.
guidance_scale (`float`, *optional*, defaults to 7.5):
Guidance scale as defined in [Classifier-Free Diffusion Guidance](https://arxiv.org/abs/2207.12598).
`guidance_scale` is defined as `w` of equation 2. of [Imagen
Paper](https://arxiv.org/pdf/2205.11487.pdf). Guidance scale is enabled by setting `guidance_scale >
1`. Higher guidance scale encourages to generate images that are closely linked to the text `prompt`,
usually at the expense of lower image quality.
negative_prompt (`str` or `List[str]`, *optional*):
The prompt or prompts not to guide the image generation. If not defined, one has to pass `negative_prompt_embeds` instead.
Ignored when not using guidance (i.e., ignored if `guidance_scale` is less than `1`).
num_images_per_prompt (`int`, *optional*, defaults to 1):
The number of images to generate per prompt.
eta (`float`, *optional*, defaults to 0.0):
Corresponds to parameter eta (η) in the DDIM paper: https://arxiv.org/abs/2010.02502. Only applies to
[`schedulers.DDIMScheduler`], will be ignored for others.
generator (`torch.Generator` or `List[torch.Generator]`, *optional*):
One or a list of [torch generator(s)](https://pytorch.org/docs/stable/generated/torch.Generator.html)
to make generation deterministic.
latents (`torch.FloatTensor`, *optional*):
Pre-generated noisy latents, sampled from a Gaussian distribution, to be used as inputs for image
generation. Can be used to tweak the same generation with different prompts. If not provided, a latents
tensor will ge generated by sampling using the supplied random `generator`.
prompt_embeds (`torch.FloatTensor`, *optional*):
Pre-generated text embeddings. Can be used to easily tweak text inputs, *e.g.* prompt weighting. If not
provided, text embeddings will be generated from `prompt` input argument.
negative_prompt_embeds (`torch.FloatTensor`, *optional*):
Pre-generated negative text embeddings. Can be used to easily tweak text inputs, *e.g.* prompt
weighting. If not provided, negative_prompt_embeds will be generated from `negative_prompt` input
argument.
output_type (`str`, *optional*, defaults to `"pil"`):
The output format of the generate image. Choose between
[PIL](https://pillow.readthedocs.io/en/stable/): `PIL.Image.Image` or `np.array`.
return_dict (`bool`, *optional*, defaults to `True`):
Whether or not to return a [`~pipelines.stable_diffusion.StableDiffusionPipelineOutput`] instead of a
plain tuple.
callback (`Callable`, *optional*):
A function that will be called every `callback_steps` steps during inference. The function will be
called with the following arguments: `callback(step: int, timestep: int, latents: torch.FloatTensor)`.
callback_steps (`int`, *optional*, defaults to 1):
The frequency at which the `callback` function will be called. If not specified, the callback will be
called at every step.
cross_attention_kwargs (`dict`, *optional*):
A kwargs dictionary that if specified is passed along to the `AttentionProcessor` as defined under
`self.processor` in
[diffusers.models.attention_processor](https://github.com/huggingface/diffusers/blob/main/src/diffusers/models/attention_processor.py).
controlnet_conditioning_scale (`float`, *optional*, defaults to 1.0):
The outputs of the controlnet are multiplied by `controlnet_conditioning_scale` before they are added
to the residual in the original unet.
Examples:
Returns:
[`~pipelines.stable_diffusion.StableDiffusionPipelineOutput`] or `tuple`:
[`~pipelines.stable_diffusion.StableDiffusionPipelineOutput`] if `return_dict` is True, otherwise a `tuple.
When returning a tuple, the first element is a list with the generated images, and the second element is a
list of `bool`s denoting whether the corresponding generated image likely represents "not-safe-for-work"
(nsfw) content, according to the `safety_checker`.
"""
# 0. Default height and width to unet
height, width = self._default_height_width(height, width, controlnet_conditioning_image)
# 1. Check inputs. Raise error if not correct
self.check_inputs(
prompt,
image,
mask_image,
controlnet_conditioning_image,
height,
width,
callback_steps,
negative_prompt,
prompt_embeds,
negative_prompt_embeds,
controlnet_conditioning_scale,
)
# 2. Define call parameters
if prompt is not None and isinstance(prompt, str):
batch_size = 1
elif prompt is not None and isinstance(prompt, list):
batch_size = len(prompt)
else:
batch_size = prompt_embeds.shape[0]
device = self._execution_device
# here `guidance_scale` is defined analog to the guidance weight `w` of equation (2)
# of the Imagen paper: https://arxiv.org/pdf/2205.11487.pdf . `guidance_scale = 1`
# corresponds to doing no classifier free guidance.
do_classifier_free_guidance = guidance_scale > 1.0
if isinstance(self.controlnet, MultiControlNetModel) and isinstance(controlnet_conditioning_scale, float):
controlnet_conditioning_scale = [controlnet_conditioning_scale] * len(self.controlnet.nets)
# 3. Encode input prompt
prompt_embeds = self._encode_prompt(
prompt,
device,
num_images_per_prompt,
do_classifier_free_guidance,
negative_prompt,
prompt_embeds=prompt_embeds,
negative_prompt_embeds=negative_prompt_embeds,
)
# 4. Prepare mask, image, and controlnet_conditioning_image
image = prepare_image(image)
mask_image = prepare_mask_image(mask_image)
# condition image(s)
if isinstance(self.controlnet, ControlNetModel):
controlnet_conditioning_image = prepare_controlnet_conditioning_image(
controlnet_conditioning_image=controlnet_conditioning_image,
width=width,
height=height,
batch_size=batch_size * num_images_per_prompt,
num_images_per_prompt=num_images_per_prompt,
device=device,
dtype=self.controlnet.dtype,
do_classifier_free_guidance=do_classifier_free_guidance,
)
elif isinstance(self.controlnet, MultiControlNetModel):
controlnet_conditioning_images = []
for image_ in controlnet_conditioning_image:
image_ = prepare_controlnet_conditioning_image(
controlnet_conditioning_image=image_,
width=width,
height=height,
batch_size=batch_size * num_images_per_prompt,
num_images_per_prompt=num_images_per_prompt,
device=device,
dtype=self.controlnet.dtype,
do_classifier_free_guidance=do_classifier_free_guidance,
)
controlnet_conditioning_images.append(image_)
controlnet_conditioning_image = controlnet_conditioning_images
else:
assert False
masked_image = image * (mask_image < 0.5)
# 5. Prepare timesteps
self.scheduler.set_timesteps(num_inference_steps, device=device)
timesteps = self.scheduler.timesteps
# 6. Prepare latent variables
num_channels_latents = self.vae.config.latent_channels
latents = self.prepare_latents(
batch_size * num_images_per_prompt,
num_channels_latents,
height,
width,
prompt_embeds.dtype,
device,
generator,
latents,
)
mask_image_latents = self.prepare_mask_latents(
mask_image,
batch_size * num_images_per_prompt,
height,
width,
prompt_embeds.dtype,
device,
do_classifier_free_guidance,
)
masked_image_latents = self.prepare_masked_image_latents(
masked_image,
batch_size * num_images_per_prompt,
height,
width,
prompt_embeds.dtype,
device,
generator,
do_classifier_free_guidance,
)
# 7. Prepare extra step kwargs. TODO: Logic should ideally just be moved out of the pipeline
extra_step_kwargs = self.prepare_extra_step_kwargs(generator, eta)
# 8. Denoising loop
num_warmup_steps = len(timesteps) - num_inference_steps * self.scheduler.order
with self.progress_bar(total=num_inference_steps) as progress_bar:
for i, t in enumerate(timesteps):
# expand the latents if we are doing classifier free guidance
non_inpainting_latent_model_input = (
torch.cat([latents] * 2) if do_classifier_free_guidance else latents
)
non_inpainting_latent_model_input = self.scheduler.scale_model_input(
non_inpainting_latent_model_input, t
)
inpainting_latent_model_input = torch.cat(
[non_inpainting_latent_model_input, mask_image_latents, masked_image_latents], dim=1
)
down_block_res_samples, mid_block_res_sample = self.controlnet(
non_inpainting_latent_model_input,
t,
encoder_hidden_states=prompt_embeds,
controlnet_cond=controlnet_conditioning_image,
conditioning_scale=controlnet_conditioning_scale,
return_dict=False,
)
# predict the noise residual
noise_pred = self.unet(
inpainting_latent_model_input,
t,
encoder_hidden_states=prompt_embeds,
cross_attention_kwargs=cross_attention_kwargs,
down_block_additional_residuals=down_block_res_samples,
mid_block_additional_residual=mid_block_res_sample,
).sample
# perform guidance
if do_classifier_free_guidance:
noise_pred_uncond, noise_pred_text = noise_pred.chunk(2)
noise_pred = noise_pred_uncond + guidance_scale * (noise_pred_text - noise_pred_uncond)
# compute the previous noisy sample x_t -> x_t-1
latents = self.scheduler.step(noise_pred, t, latents, **extra_step_kwargs).prev_sample
# call the callback, if provided
if i == len(timesteps) - 1 or ((i + 1) > num_warmup_steps and (i + 1) % self.scheduler.order == 0):
progress_bar.update()
if callback is not None and i % callback_steps == 0:
step_idx = i // getattr(self.scheduler, "order", 1)
callback(step_idx, t, latents)
# If we do sequential model offloading, let's offload unet and controlnet
# manually for max memory savings
if hasattr(self, "final_offload_hook") and self.final_offload_hook is not None:
self.unet.to("cpu")
self.controlnet.to("cpu")
torch.cuda.empty_cache()
if output_type == "latent":
image = latents
has_nsfw_concept = None
elif output_type == "pil":
# 8. Post-processing
image = self.decode_latents(latents)
# 9. Run safety checker
image, has_nsfw_concept = self.run_safety_checker(image, device, prompt_embeds.dtype)
# 10. Convert to PIL
image = self.numpy_to_pil(image)
else:
# 8. Post-processing
image = self.decode_latents(latents)
# 9. Run safety checker
image, has_nsfw_concept = self.run_safety_checker(image, device, prompt_embeds.dtype)
# Offload last model to CPU
if hasattr(self, "final_offload_hook") and self.final_offload_hook is not None:
self.final_offload_hook.offload()
if not return_dict:
return (image, has_nsfw_concept)
return StableDiffusionPipelineOutput(images=image, nsfw_content_detected=has_nsfw_concept)
| diffusers/examples/community/stable_diffusion_controlnet_inpaint.py/0 | {
"file_path": "diffusers/examples/community/stable_diffusion_controlnet_inpaint.py",
"repo_id": "diffusers",
"token_count": 25229
} | 93 |
import inspect
import os
import random
import re
from dataclasses import dataclass
from typing import Callable, Dict, List, Optional, Union
import torch
from transformers import CLIPImageProcessor, CLIPTextModel, CLIPTokenizer
from diffusers import DiffusionPipeline
from diffusers.configuration_utils import FrozenDict
from diffusers.models import AutoencoderKL, UNet2DConditionModel
from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion import StableDiffusionPipelineOutput
from diffusers.pipelines.stable_diffusion.safety_checker import StableDiffusionSafetyChecker
from diffusers.schedulers import DDIMScheduler, LMSDiscreteScheduler, PNDMScheduler
from diffusers.utils import deprecate, logging
logger = logging.get_logger(__name__) # pylint: disable=invalid-name
global_re_wildcard = re.compile(r"__([^_]*)__")
def get_filename(path: str):
# this doesn't work on Windows
return os.path.basename(path).split(".txt")[0]
def read_wildcard_values(path: str):
with open(path, encoding="utf8") as f:
return f.read().splitlines()
def grab_wildcard_values(wildcard_option_dict: Dict[str, List[str]] = {}, wildcard_files: List[str] = []):
for wildcard_file in wildcard_files:
filename = get_filename(wildcard_file)
read_values = read_wildcard_values(wildcard_file)
if filename not in wildcard_option_dict:
wildcard_option_dict[filename] = []
wildcard_option_dict[filename].extend(read_values)
return wildcard_option_dict
def replace_prompt_with_wildcards(
prompt: str, wildcard_option_dict: Dict[str, List[str]] = {}, wildcard_files: List[str] = []
):
new_prompt = prompt
# get wildcard options
wildcard_option_dict = grab_wildcard_values(wildcard_option_dict, wildcard_files)
for m in global_re_wildcard.finditer(new_prompt):
wildcard_value = m.group()
replace_value = random.choice(wildcard_option_dict[wildcard_value.strip("__")])
new_prompt = new_prompt.replace(wildcard_value, replace_value, 1)
return new_prompt
@dataclass
class WildcardStableDiffusionOutput(StableDiffusionPipelineOutput):
prompts: List[str]
class WildcardStableDiffusionPipeline(DiffusionPipeline):
r"""
Example Usage:
pipe = WildcardStableDiffusionPipeline.from_pretrained(
"CompVis/stable-diffusion-v1-4",
torch_dtype=torch.float16,
)
prompt = "__animal__ sitting on a __object__ wearing a __clothing__"
out = pipe(
prompt,
wildcard_option_dict={
"clothing":["hat", "shirt", "scarf", "beret"]
},
wildcard_files=["object.txt", "animal.txt"],
num_prompt_samples=1
)
Pipeline for text-to-image generation with wild cards using Stable Diffusion.
This model inherits from [`DiffusionPipeline`]. Check the superclass documentation for the generic methods the
library implements for all the pipelines (such as downloading or saving, running on a particular device, etc.)
Args:
vae ([`AutoencoderKL`]):
Variational Auto-Encoder (VAE) Model to encode and decode images to and from latent representations.
text_encoder ([`CLIPTextModel`]):
Frozen text-encoder. Stable Diffusion uses the text portion of
[CLIP](https://huggingface.co/docs/transformers/model_doc/clip#transformers.CLIPTextModel), specifically
the [clip-vit-large-patch14](https://huggingface.co/openai/clip-vit-large-patch14) variant.
tokenizer (`CLIPTokenizer`):
Tokenizer of class
[CLIPTokenizer](https://huggingface.co/docs/transformers/v4.21.0/en/model_doc/clip#transformers.CLIPTokenizer).
unet ([`UNet2DConditionModel`]): Conditional U-Net architecture to denoise the encoded image latents.
scheduler ([`SchedulerMixin`]):
A scheduler to be used in combination with `unet` to denoise the encoded image latents. Can be one of
[`DDIMScheduler`], [`LMSDiscreteScheduler`], or [`PNDMScheduler`].
safety_checker ([`StableDiffusionSafetyChecker`]):
Classification module that estimates whether generated images could be considered offensive or harmful.
Please, refer to the [model card](https://huggingface.co/CompVis/stable-diffusion-v1-4) for details.
feature_extractor ([`CLIPImageProcessor`]):
Model that extracts features from generated images to be used as inputs for the `safety_checker`.
"""
def __init__(
self,
vae: AutoencoderKL,
text_encoder: CLIPTextModel,
tokenizer: CLIPTokenizer,
unet: UNet2DConditionModel,
scheduler: Union[DDIMScheduler, PNDMScheduler, LMSDiscreteScheduler],
safety_checker: StableDiffusionSafetyChecker,
feature_extractor: CLIPImageProcessor,
):
super().__init__()
if hasattr(scheduler.config, "steps_offset") and scheduler.config.steps_offset != 1:
deprecation_message = (
f"The configuration file of this scheduler: {scheduler} is outdated. `steps_offset`"
f" should be set to 1 instead of {scheduler.config.steps_offset}. Please make sure "
"to update the config accordingly as leaving `steps_offset` might led to incorrect results"
" in future versions. If you have downloaded this checkpoint from the Hugging Face Hub,"
" it would be very nice if you could open a Pull request for the `scheduler/scheduler_config.json`"
" file"
)
deprecate("steps_offset!=1", "1.0.0", deprecation_message, standard_warn=False)
new_config = dict(scheduler.config)
new_config["steps_offset"] = 1
scheduler._internal_dict = FrozenDict(new_config)
if safety_checker is None:
logger.warning(
f"You have disabled the safety checker for {self.__class__} by passing `safety_checker=None`. Ensure"
" that you abide to the conditions of the Stable Diffusion license and do not expose unfiltered"
" results in services or applications open to the public. Both the diffusers team and Hugging Face"
" strongly recommend to keep the safety filter enabled in all public facing circumstances, disabling"
" it only for use-cases that involve analyzing network behavior or auditing its results. For more"
" information, please have a look at https://github.com/huggingface/diffusers/pull/254 ."
)
self.register_modules(
vae=vae,
text_encoder=text_encoder,
tokenizer=tokenizer,
unet=unet,
scheduler=scheduler,
safety_checker=safety_checker,
feature_extractor=feature_extractor,
)
@torch.no_grad()
def __call__(
self,
prompt: Union[str, List[str]],
height: int = 512,
width: int = 512,
num_inference_steps: int = 50,
guidance_scale: float = 7.5,
negative_prompt: Optional[Union[str, List[str]]] = None,
num_images_per_prompt: Optional[int] = 1,
eta: float = 0.0,
generator: Optional[torch.Generator] = None,
latents: Optional[torch.FloatTensor] = None,
output_type: Optional[str] = "pil",
return_dict: bool = True,
callback: Optional[Callable[[int, int, torch.FloatTensor], None]] = None,
callback_steps: int = 1,
wildcard_option_dict: Dict[str, List[str]] = {},
wildcard_files: List[str] = [],
num_prompt_samples: Optional[int] = 1,
**kwargs,
):
r"""
Function invoked when calling the pipeline for generation.
Args:
prompt (`str` or `List[str]`):
The prompt or prompts to guide the image generation.
height (`int`, *optional*, defaults to 512):
The height in pixels of the generated image.
width (`int`, *optional*, defaults to 512):
The width in pixels of the generated image.
num_inference_steps (`int`, *optional*, defaults to 50):
The number of denoising steps. More denoising steps usually lead to a higher quality image at the
expense of slower inference.
guidance_scale (`float`, *optional*, defaults to 7.5):
Guidance scale as defined in [Classifier-Free Diffusion Guidance](https://arxiv.org/abs/2207.12598).
`guidance_scale` is defined as `w` of equation 2. of [Imagen
Paper](https://arxiv.org/pdf/2205.11487.pdf). Guidance scale is enabled by setting `guidance_scale >
1`. Higher guidance scale encourages to generate images that are closely linked to the text `prompt`,
usually at the expense of lower image quality.
negative_prompt (`str` or `List[str]`, *optional*):
The prompt or prompts not to guide the image generation. Ignored when not using guidance (i.e., ignored
if `guidance_scale` is less than `1`).
num_images_per_prompt (`int`, *optional*, defaults to 1):
The number of images to generate per prompt.
eta (`float`, *optional*, defaults to 0.0):
Corresponds to parameter eta (η) in the DDIM paper: https://arxiv.org/abs/2010.02502. Only applies to
[`schedulers.DDIMScheduler`], will be ignored for others.
generator (`torch.Generator`, *optional*):
A [torch generator](https://pytorch.org/docs/stable/generated/torch.Generator.html) to make generation
deterministic.
latents (`torch.FloatTensor`, *optional*):
Pre-generated noisy latents, sampled from a Gaussian distribution, to be used as inputs for image
generation. Can be used to tweak the same generation with different prompts. If not provided, a latents
tensor will ge generated by sampling using the supplied random `generator`.
output_type (`str`, *optional*, defaults to `"pil"`):
The output format of the generate image. Choose between
[PIL](https://pillow.readthedocs.io/en/stable/): `PIL.Image.Image` or `np.array`.
return_dict (`bool`, *optional*, defaults to `True`):
Whether or not to return a [`~pipelines.stable_diffusion.StableDiffusionPipelineOutput`] instead of a
plain tuple.
callback (`Callable`, *optional*):
A function that will be called every `callback_steps` steps during inference. The function will be
called with the following arguments: `callback(step: int, timestep: int, latents: torch.FloatTensor)`.
callback_steps (`int`, *optional*, defaults to 1):
The frequency at which the `callback` function will be called. If not specified, the callback will be
called at every step.
wildcard_option_dict (Dict[str, List[str]]):
dict with key as `wildcard` and values as a list of possible replacements. For example if a prompt, "A __animal__ sitting on a chair". A wildcard_option_dict can provide possible values for "animal" like this: {"animal":["dog", "cat", "fox"]}
wildcard_files: (List[str])
List of filenames of txt files for wildcard replacements. For example if a prompt, "A __animal__ sitting on a chair". A file can be provided ["animal.txt"]
num_prompt_samples: int
Number of times to sample wildcards for each prompt provided
Returns:
[`~pipelines.stable_diffusion.StableDiffusionPipelineOutput`] or `tuple`:
[`~pipelines.stable_diffusion.StableDiffusionPipelineOutput`] if `return_dict` is True, otherwise a `tuple.
When returning a tuple, the first element is a list with the generated images, and the second element is a
list of `bool`s denoting whether the corresponding generated image likely represents "not-safe-for-work"
(nsfw) content, according to the `safety_checker`.
"""
if isinstance(prompt, str):
prompt = [
replace_prompt_with_wildcards(prompt, wildcard_option_dict, wildcard_files)
for i in range(num_prompt_samples)
]
batch_size = len(prompt)
elif isinstance(prompt, list):
prompt_list = []
for p in prompt:
for i in range(num_prompt_samples):
prompt_list.append(replace_prompt_with_wildcards(p, wildcard_option_dict, wildcard_files))
prompt = prompt_list
batch_size = len(prompt)
else:
raise ValueError(f"`prompt` has to be of type `str` or `list` but is {type(prompt)}")
if height % 8 != 0 or width % 8 != 0:
raise ValueError(f"`height` and `width` have to be divisible by 8 but are {height} and {width}.")
if (callback_steps is None) or (
callback_steps is not None and (not isinstance(callback_steps, int) or callback_steps <= 0)
):
raise ValueError(
f"`callback_steps` has to be a positive integer but is {callback_steps} of type"
f" {type(callback_steps)}."
)
# get prompt text embeddings
text_inputs = self.tokenizer(
prompt,
padding="max_length",
max_length=self.tokenizer.model_max_length,
return_tensors="pt",
)
text_input_ids = text_inputs.input_ids
if text_input_ids.shape[-1] > self.tokenizer.model_max_length:
removed_text = self.tokenizer.batch_decode(text_input_ids[:, self.tokenizer.model_max_length :])
logger.warning(
"The following part of your input was truncated because CLIP can only handle sequences up to"
f" {self.tokenizer.model_max_length} tokens: {removed_text}"
)
text_input_ids = text_input_ids[:, : self.tokenizer.model_max_length]
text_embeddings = self.text_encoder(text_input_ids.to(self.device))[0]
# duplicate text embeddings for each generation per prompt, using mps friendly method
bs_embed, seq_len, _ = text_embeddings.shape
text_embeddings = text_embeddings.repeat(1, num_images_per_prompt, 1)
text_embeddings = text_embeddings.view(bs_embed * num_images_per_prompt, seq_len, -1)
# here `guidance_scale` is defined analog to the guidance weight `w` of equation (2)
# of the Imagen paper: https://arxiv.org/pdf/2205.11487.pdf . `guidance_scale = 1`
# corresponds to doing no classifier free guidance.
do_classifier_free_guidance = guidance_scale > 1.0
# get unconditional embeddings for classifier free guidance
if do_classifier_free_guidance:
uncond_tokens: List[str]
if negative_prompt is None:
uncond_tokens = [""] * batch_size
elif type(prompt) is not type(negative_prompt):
raise TypeError(
f"`negative_prompt` should be the same type to `prompt`, but got {type(negative_prompt)} !="
f" {type(prompt)}."
)
elif isinstance(negative_prompt, str):
uncond_tokens = [negative_prompt]
elif batch_size != len(negative_prompt):
raise ValueError(
f"`negative_prompt`: {negative_prompt} has batch size {len(negative_prompt)}, but `prompt`:"
f" {prompt} has batch size {batch_size}. Please make sure that passed `negative_prompt` matches"
" the batch size of `prompt`."
)
else:
uncond_tokens = negative_prompt
max_length = text_input_ids.shape[-1]
uncond_input = self.tokenizer(
uncond_tokens,
padding="max_length",
max_length=max_length,
truncation=True,
return_tensors="pt",
)
uncond_embeddings = self.text_encoder(uncond_input.input_ids.to(self.device))[0]
# duplicate unconditional embeddings for each generation per prompt, using mps friendly method
seq_len = uncond_embeddings.shape[1]
uncond_embeddings = uncond_embeddings.repeat(1, num_images_per_prompt, 1)
uncond_embeddings = uncond_embeddings.view(batch_size * num_images_per_prompt, seq_len, -1)
# For classifier free guidance, we need to do two forward passes.
# Here we concatenate the unconditional and text embeddings into a single batch
# to avoid doing two forward passes
text_embeddings = torch.cat([uncond_embeddings, text_embeddings])
# get the initial random noise unless the user supplied it
# Unlike in other pipelines, latents need to be generated in the target device
# for 1-to-1 results reproducibility with the CompVis implementation.
# However this currently doesn't work in `mps`.
latents_shape = (batch_size * num_images_per_prompt, self.unet.config.in_channels, height // 8, width // 8)
latents_dtype = text_embeddings.dtype
if latents is None:
if self.device.type == "mps":
# randn does not exist on mps
latents = torch.randn(latents_shape, generator=generator, device="cpu", dtype=latents_dtype).to(
self.device
)
else:
latents = torch.randn(latents_shape, generator=generator, device=self.device, dtype=latents_dtype)
else:
if latents.shape != latents_shape:
raise ValueError(f"Unexpected latents shape, got {latents.shape}, expected {latents_shape}")
latents = latents.to(self.device)
# set timesteps
self.scheduler.set_timesteps(num_inference_steps)
# Some schedulers like PNDM have timesteps as arrays
# It's more optimized to move all timesteps to correct device beforehand
timesteps_tensor = self.scheduler.timesteps.to(self.device)
# scale the initial noise by the standard deviation required by the scheduler
latents = latents * self.scheduler.init_noise_sigma
# prepare extra kwargs for the scheduler step, since not all schedulers have the same signature
# eta (η) is only used with the DDIMScheduler, it will be ignored for other schedulers.
# eta corresponds to η in DDIM paper: https://arxiv.org/abs/2010.02502
# and should be between [0, 1]
accepts_eta = "eta" in set(inspect.signature(self.scheduler.step).parameters.keys())
extra_step_kwargs = {}
if accepts_eta:
extra_step_kwargs["eta"] = eta
for i, t in enumerate(self.progress_bar(timesteps_tensor)):
# expand the latents if we are doing classifier free guidance
latent_model_input = torch.cat([latents] * 2) if do_classifier_free_guidance else latents
latent_model_input = self.scheduler.scale_model_input(latent_model_input, t)
# predict the noise residual
noise_pred = self.unet(latent_model_input, t, encoder_hidden_states=text_embeddings).sample
# perform guidance
if do_classifier_free_guidance:
noise_pred_uncond, noise_pred_text = noise_pred.chunk(2)
noise_pred = noise_pred_uncond + guidance_scale * (noise_pred_text - noise_pred_uncond)
# compute the previous noisy sample x_t -> x_t-1
latents = self.scheduler.step(noise_pred, t, latents, **extra_step_kwargs).prev_sample
# call the callback, if provided
if callback is not None and i % callback_steps == 0:
step_idx = i // getattr(self.scheduler, "order", 1)
callback(step_idx, t, latents)
latents = 1 / 0.18215 * latents
image = self.vae.decode(latents).sample
image = (image / 2 + 0.5).clamp(0, 1)
# we always cast to float32 as this does not cause significant overhead and is compatible with bfloat16
image = image.cpu().permute(0, 2, 3, 1).float().numpy()
if self.safety_checker is not None:
safety_checker_input = self.feature_extractor(self.numpy_to_pil(image), return_tensors="pt").to(
self.device
)
image, has_nsfw_concept = self.safety_checker(
images=image, clip_input=safety_checker_input.pixel_values.to(text_embeddings.dtype)
)
else:
has_nsfw_concept = None
if output_type == "pil":
image = self.numpy_to_pil(image)
if not return_dict:
return (image, has_nsfw_concept)
return WildcardStableDiffusionOutput(images=image, nsfw_content_detected=has_nsfw_concept, prompts=prompt)
| diffusers/examples/community/wildcard_stable_diffusion.py/0 | {
"file_path": "diffusers/examples/community/wildcard_stable_diffusion.py",
"repo_id": "diffusers",
"token_count": 8987
} | 94 |
# coding=utf-8
# Copyright 2023 HuggingFace Inc.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import logging
import os
import sys
import tempfile
sys.path.append("..")
from test_examples_utils import ExamplesTestsAccelerate, run_command # noqa: E402
logging.basicConfig(level=logging.DEBUG)
logger = logging.getLogger()
stream_handler = logging.StreamHandler(sys.stdout)
logger.addHandler(stream_handler)
class ControlNet(ExamplesTestsAccelerate):
def test_controlnet_checkpointing_checkpoints_total_limit(self):
with tempfile.TemporaryDirectory() as tmpdir:
test_args = f"""
examples/controlnet/train_controlnet.py
--pretrained_model_name_or_path=hf-internal-testing/tiny-stable-diffusion-pipe
--dataset_name=hf-internal-testing/fill10
--output_dir={tmpdir}
--resolution=64
--train_batch_size=1
--gradient_accumulation_steps=1
--max_train_steps=6
--checkpoints_total_limit=2
--checkpointing_steps=2
--controlnet_model_name_or_path=hf-internal-testing/tiny-controlnet
""".split()
run_command(self._launch_args + test_args)
self.assertEqual(
{x for x in os.listdir(tmpdir) if "checkpoint" in x},
{"checkpoint-4", "checkpoint-6"},
)
def test_controlnet_checkpointing_checkpoints_total_limit_removes_multiple_checkpoints(self):
with tempfile.TemporaryDirectory() as tmpdir:
test_args = f"""
examples/controlnet/train_controlnet.py
--pretrained_model_name_or_path=hf-internal-testing/tiny-stable-diffusion-pipe
--dataset_name=hf-internal-testing/fill10
--output_dir={tmpdir}
--resolution=64
--train_batch_size=1
--gradient_accumulation_steps=1
--controlnet_model_name_or_path=hf-internal-testing/tiny-controlnet
--max_train_steps=6
--checkpointing_steps=2
""".split()
run_command(self._launch_args + test_args)
self.assertEqual(
{x for x in os.listdir(tmpdir) if "checkpoint" in x},
{"checkpoint-2", "checkpoint-4", "checkpoint-6"},
)
resume_run_args = f"""
examples/controlnet/train_controlnet.py
--pretrained_model_name_or_path=hf-internal-testing/tiny-stable-diffusion-pipe
--dataset_name=hf-internal-testing/fill10
--output_dir={tmpdir}
--resolution=64
--train_batch_size=1
--gradient_accumulation_steps=1
--controlnet_model_name_or_path=hf-internal-testing/tiny-controlnet
--max_train_steps=8
--checkpointing_steps=2
--resume_from_checkpoint=checkpoint-6
--checkpoints_total_limit=2
""".split()
run_command(self._launch_args + resume_run_args)
self.assertEqual({x for x in os.listdir(tmpdir) if "checkpoint" in x}, {"checkpoint-6", "checkpoint-8"})
class ControlNetSDXL(ExamplesTestsAccelerate):
def test_controlnet_sdxl(self):
with tempfile.TemporaryDirectory() as tmpdir:
test_args = f"""
examples/controlnet/train_controlnet_sdxl.py
--pretrained_model_name_or_path=hf-internal-testing/tiny-stable-diffusion-xl-pipe
--dataset_name=hf-internal-testing/fill10
--output_dir={tmpdir}
--resolution=64
--train_batch_size=1
--gradient_accumulation_steps=1
--controlnet_model_name_or_path=hf-internal-testing/tiny-controlnet-sdxl
--max_train_steps=4
--checkpointing_steps=2
""".split()
run_command(self._launch_args + test_args)
self.assertTrue(os.path.isfile(os.path.join(tmpdir, "diffusion_pytorch_model.safetensors")))
| diffusers/examples/controlnet/test_controlnet.py/0 | {
"file_path": "diffusers/examples/controlnet/test_controlnet.py",
"repo_id": "diffusers",
"token_count": 2011
} | 95 |
#!/usr/bin/env python
# coding=utf-8
# Copyright 2023 The HuggingFace Inc. team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
import argparse
import copy
import gc
import importlib
import itertools
import logging
import math
import os
import shutil
import warnings
from pathlib import Path
import numpy as np
import torch
import torch.nn.functional as F
import torch.utils.checkpoint
import transformers
from accelerate import Accelerator
from accelerate.logging import get_logger
from accelerate.utils import ProjectConfiguration, set_seed
from huggingface_hub import create_repo, model_info, upload_folder
from huggingface_hub.utils import insecure_hashlib
from packaging import version
from PIL import Image
from PIL.ImageOps import exif_transpose
from torch.utils.data import Dataset
from torchvision import transforms
from tqdm.auto import tqdm
from transformers import AutoTokenizer, PretrainedConfig
import diffusers
from diffusers import (
AutoencoderKL,
DDPMScheduler,
DiffusionPipeline,
StableDiffusionPipeline,
UNet2DConditionModel,
)
from diffusers.optimization import get_scheduler
from diffusers.training_utils import compute_snr
from diffusers.utils import check_min_version, is_wandb_available
from diffusers.utils.import_utils import is_xformers_available
from diffusers.utils.torch_utils import is_compiled_module
if is_wandb_available():
import wandb
# Will error if the minimal version of diffusers is not installed. Remove at your own risks.
check_min_version("0.26.0.dev0")
logger = get_logger(__name__)
def save_model_card(
repo_id: str,
images=None,
base_model=str,
train_text_encoder=False,
prompt=str,
repo_folder=None,
pipeline: DiffusionPipeline = None,
):
img_str = ""
for i, image in enumerate(images):
image.save(os.path.join(repo_folder, f"image_{i}.png"))
img_str += f"\n"
yaml = f"""
---
license: creativeml-openrail-m
base_model: {base_model}
instance_prompt: {prompt}
tags:
- {'stable-diffusion' if isinstance(pipeline, StableDiffusionPipeline) else 'if'}
- {'stable-diffusion-diffusers' if isinstance(pipeline, StableDiffusionPipeline) else 'if-diffusers'}
- text-to-image
- diffusers
- dreambooth
inference: true
---
"""
model_card = f"""
# DreamBooth - {repo_id}
This is a dreambooth model derived from {base_model}. The weights were trained on {prompt} using [DreamBooth](https://dreambooth.github.io/).
You can find some example images in the following. \n
{img_str}
DreamBooth for the text encoder was enabled: {train_text_encoder}.
"""
with open(os.path.join(repo_folder, "README.md"), "w") as f:
f.write(yaml + model_card)
def log_validation(
text_encoder,
tokenizer,
unet,
vae,
args,
accelerator,
weight_dtype,
global_step,
prompt_embeds,
negative_prompt_embeds,
):
logger.info(
f"Running validation... \n Generating {args.num_validation_images} images with prompt:"
f" {args.validation_prompt}."
)
pipeline_args = {}
if vae is not None:
pipeline_args["vae"] = vae
# create pipeline (note: unet and vae are loaded again in float32)
pipeline = DiffusionPipeline.from_pretrained(
args.pretrained_model_name_or_path,
tokenizer=tokenizer,
text_encoder=text_encoder,
unet=unet,
revision=args.revision,
variant=args.variant,
torch_dtype=weight_dtype,
**pipeline_args,
)
# We train on the simplified learning objective. If we were previously predicting a variance, we need the scheduler to ignore it
scheduler_args = {}
if "variance_type" in pipeline.scheduler.config:
variance_type = pipeline.scheduler.config.variance_type
if variance_type in ["learned", "learned_range"]:
variance_type = "fixed_small"
scheduler_args["variance_type"] = variance_type
module = importlib.import_module("diffusers")
scheduler_class = getattr(module, args.validation_scheduler)
pipeline.scheduler = scheduler_class.from_config(pipeline.scheduler.config, **scheduler_args)
pipeline = pipeline.to(accelerator.device)
pipeline.set_progress_bar_config(disable=True)
if args.pre_compute_text_embeddings:
pipeline_args = {
"prompt_embeds": prompt_embeds,
"negative_prompt_embeds": negative_prompt_embeds,
}
else:
pipeline_args = {"prompt": args.validation_prompt}
# run inference
generator = None if args.seed is None else torch.Generator(device=accelerator.device).manual_seed(args.seed)
images = []
if args.validation_images is None:
for _ in range(args.num_validation_images):
with torch.autocast("cuda"):
image = pipeline(**pipeline_args, num_inference_steps=25, generator=generator).images[0]
images.append(image)
else:
for image in args.validation_images:
image = Image.open(image)
image = pipeline(**pipeline_args, image=image, generator=generator).images[0]
images.append(image)
for tracker in accelerator.trackers:
if tracker.name == "tensorboard":
np_images = np.stack([np.asarray(img) for img in images])
tracker.writer.add_images("validation", np_images, global_step, dataformats="NHWC")
if tracker.name == "wandb":
tracker.log(
{
"validation": [
wandb.Image(image, caption=f"{i}: {args.validation_prompt}") for i, image in enumerate(images)
]
}
)
del pipeline
torch.cuda.empty_cache()
return images
def import_model_class_from_model_name_or_path(pretrained_model_name_or_path: str, revision: str):
text_encoder_config = PretrainedConfig.from_pretrained(
pretrained_model_name_or_path,
subfolder="text_encoder",
revision=revision,
)
model_class = text_encoder_config.architectures[0]
if model_class == "CLIPTextModel":
from transformers import CLIPTextModel
return CLIPTextModel
elif model_class == "RobertaSeriesModelWithTransformation":
from diffusers.pipelines.alt_diffusion.modeling_roberta_series import RobertaSeriesModelWithTransformation
return RobertaSeriesModelWithTransformation
elif model_class == "T5EncoderModel":
from transformers import T5EncoderModel
return T5EncoderModel
else:
raise ValueError(f"{model_class} is not supported.")
def parse_args(input_args=None):
parser = argparse.ArgumentParser(description="Simple example of a training script.")
parser.add_argument(
"--pretrained_model_name_or_path",
type=str,
default=None,
required=True,
help="Path to pretrained model or model identifier from huggingface.co/models.",
)
parser.add_argument(
"--revision",
type=str,
default=None,
required=False,
help="Revision of pretrained model identifier from huggingface.co/models.",
)
parser.add_argument(
"--variant",
type=str,
default=None,
help="Variant of the model files of the pretrained model identifier from huggingface.co/models, 'e.g.' fp16",
)
parser.add_argument(
"--tokenizer_name",
type=str,
default=None,
help="Pretrained tokenizer name or path if not the same as model_name",
)
parser.add_argument(
"--instance_data_dir",
type=str,
default=None,
required=True,
help="A folder containing the training data of instance images.",
)
parser.add_argument(
"--class_data_dir",
type=str,
default=None,
required=False,
help="A folder containing the training data of class images.",
)
parser.add_argument(
"--instance_prompt",
type=str,
default=None,
required=True,
help="The prompt with identifier specifying the instance",
)
parser.add_argument(
"--class_prompt",
type=str,
default=None,
help="The prompt to specify images in the same class as provided instance images.",
)
parser.add_argument(
"--with_prior_preservation",
default=False,
action="store_true",
help="Flag to add prior preservation loss.",
)
parser.add_argument("--prior_loss_weight", type=float, default=1.0, help="The weight of prior preservation loss.")
parser.add_argument(
"--num_class_images",
type=int,
default=100,
help=(
"Minimal class images for prior preservation loss. If there are not enough images already present in"
" class_data_dir, additional images will be sampled with class_prompt."
),
)
parser.add_argument(
"--output_dir",
type=str,
default="dreambooth-model",
help="The output directory where the model predictions and checkpoints will be written.",
)
parser.add_argument("--seed", type=int, default=None, help="A seed for reproducible training.")
parser.add_argument(
"--resolution",
type=int,
default=512,
help=(
"The resolution for input images, all the images in the train/validation dataset will be resized to this"
" resolution"
),
)
parser.add_argument(
"--center_crop",
default=False,
action="store_true",
help=(
"Whether to center crop the input images to the resolution. If not set, the images will be randomly"
" cropped. The images will be resized to the resolution first before cropping."
),
)
parser.add_argument(
"--train_text_encoder",
action="store_true",
help="Whether to train the text encoder. If set, the text encoder should be float32 precision.",
)
parser.add_argument(
"--train_batch_size", type=int, default=4, help="Batch size (per device) for the training dataloader."
)
parser.add_argument(
"--sample_batch_size", type=int, default=4, help="Batch size (per device) for sampling images."
)
parser.add_argument("--num_train_epochs", type=int, default=1)
parser.add_argument(
"--max_train_steps",
type=int,
default=None,
help="Total number of training steps to perform. If provided, overrides num_train_epochs.",
)
parser.add_argument(
"--checkpointing_steps",
type=int,
default=500,
help=(
"Save a checkpoint of the training state every X updates. Checkpoints can be used for resuming training via `--resume_from_checkpoint`. "
"In the case that the checkpoint is better than the final trained model, the checkpoint can also be used for inference."
"Using a checkpoint for inference requires separate loading of the original pipeline and the individual checkpointed model components."
"See https://huggingface.co/docs/diffusers/main/en/training/dreambooth#performing-inference-using-a-saved-checkpoint for step by step"
"instructions."
),
)
parser.add_argument(
"--checkpoints_total_limit",
type=int,
default=None,
help=(
"Max number of checkpoints to store. Passed as `total_limit` to the `Accelerator` `ProjectConfiguration`."
" See Accelerator::save_state https://huggingface.co/docs/accelerate/package_reference/accelerator#accelerate.Accelerator.save_state"
" for more details"
),
)
parser.add_argument(
"--resume_from_checkpoint",
type=str,
default=None,
help=(
"Whether training should be resumed from a previous checkpoint. Use a path saved by"
' `--checkpointing_steps`, or `"latest"` to automatically select the last available checkpoint.'
),
)
parser.add_argument(
"--gradient_accumulation_steps",
type=int,
default=1,
help="Number of updates steps to accumulate before performing a backward/update pass.",
)
parser.add_argument(
"--gradient_checkpointing",
action="store_true",
help="Whether or not to use gradient checkpointing to save memory at the expense of slower backward pass.",
)
parser.add_argument(
"--learning_rate",
type=float,
default=5e-6,
help="Initial learning rate (after the potential warmup period) to use.",
)
parser.add_argument(
"--scale_lr",
action="store_true",
default=False,
help="Scale the learning rate by the number of GPUs, gradient accumulation steps, and batch size.",
)
parser.add_argument(
"--lr_scheduler",
type=str,
default="constant",
help=(
'The scheduler type to use. Choose between ["linear", "cosine", "cosine_with_restarts", "polynomial",'
' "constant", "constant_with_warmup"]'
),
)
parser.add_argument(
"--lr_warmup_steps", type=int, default=500, help="Number of steps for the warmup in the lr scheduler."
)
parser.add_argument(
"--lr_num_cycles",
type=int,
default=1,
help="Number of hard resets of the lr in cosine_with_restarts scheduler.",
)
parser.add_argument("--lr_power", type=float, default=1.0, help="Power factor of the polynomial scheduler.")
parser.add_argument(
"--use_8bit_adam", action="store_true", help="Whether or not to use 8-bit Adam from bitsandbytes."
)
parser.add_argument(
"--dataloader_num_workers",
type=int,
default=0,
help=(
"Number of subprocesses to use for data loading. 0 means that the data will be loaded in the main process."
),
)
parser.add_argument("--adam_beta1", type=float, default=0.9, help="The beta1 parameter for the Adam optimizer.")
parser.add_argument("--adam_beta2", type=float, default=0.999, help="The beta2 parameter for the Adam optimizer.")
parser.add_argument("--adam_weight_decay", type=float, default=1e-2, help="Weight decay to use.")
parser.add_argument("--adam_epsilon", type=float, default=1e-08, help="Epsilon value for the Adam optimizer")
parser.add_argument("--max_grad_norm", default=1.0, type=float, help="Max gradient norm.")
parser.add_argument("--push_to_hub", action="store_true", help="Whether or not to push the model to the Hub.")
parser.add_argument("--hub_token", type=str, default=None, help="The token to use to push to the Model Hub.")
parser.add_argument(
"--hub_model_id",
type=str,
default=None,
help="The name of the repository to keep in sync with the local `output_dir`.",
)
parser.add_argument(
"--logging_dir",
type=str,
default="logs",
help=(
"[TensorBoard](https://www.tensorflow.org/tensorboard) log directory. Will default to"
" *output_dir/runs/**CURRENT_DATETIME_HOSTNAME***."
),
)
parser.add_argument(
"--allow_tf32",
action="store_true",
help=(
"Whether or not to allow TF32 on Ampere GPUs. Can be used to speed up training. For more information, see"
" https://pytorch.org/docs/stable/notes/cuda.html#tensorfloat-32-tf32-on-ampere-devices"
),
)
parser.add_argument(
"--report_to",
type=str,
default="tensorboard",
help=(
'The integration to report the results and logs to. Supported platforms are `"tensorboard"`'
' (default), `"wandb"` and `"comet_ml"`. Use `"all"` to report to all integrations.'
),
)
parser.add_argument(
"--validation_prompt",
type=str,
default=None,
help="A prompt that is used during validation to verify that the model is learning.",
)
parser.add_argument(
"--num_validation_images",
type=int,
default=4,
help="Number of images that should be generated during validation with `validation_prompt`.",
)
parser.add_argument(
"--validation_steps",
type=int,
default=100,
help=(
"Run validation every X steps. Validation consists of running the prompt"
" `args.validation_prompt` multiple times: `args.num_validation_images`"
" and logging the images."
),
)
parser.add_argument(
"--mixed_precision",
type=str,
default=None,
choices=["no", "fp16", "bf16"],
help=(
"Whether to use mixed precision. Choose between fp16 and bf16 (bfloat16). Bf16 requires PyTorch >="
" 1.10.and an Nvidia Ampere GPU. Default to the value of accelerate config of the current system or the"
" flag passed with the `accelerate.launch` command. Use this argument to override the accelerate config."
),
)
parser.add_argument(
"--prior_generation_precision",
type=str,
default=None,
choices=["no", "fp32", "fp16", "bf16"],
help=(
"Choose prior generation precision between fp32, fp16 and bf16 (bfloat16). Bf16 requires PyTorch >="
" 1.10.and an Nvidia Ampere GPU. Default to fp16 if a GPU is available else fp32."
),
)
parser.add_argument("--local_rank", type=int, default=-1, help="For distributed training: local_rank")
parser.add_argument(
"--enable_xformers_memory_efficient_attention", action="store_true", help="Whether or not to use xformers."
)
parser.add_argument(
"--set_grads_to_none",
action="store_true",
help=(
"Save more memory by using setting grads to None instead of zero. Be aware, that this changes certain"
" behaviors, so disable this argument if it causes any problems. More info:"
" https://pytorch.org/docs/stable/generated/torch.optim.Optimizer.zero_grad.html"
),
)
parser.add_argument(
"--offset_noise",
action="store_true",
default=False,
help=(
"Fine-tuning against a modified noise"
" See: https://www.crosslabs.org//blog/diffusion-with-offset-noise for more information."
),
)
parser.add_argument(
"--snr_gamma",
type=float,
default=None,
help="SNR weighting gamma to be used if rebalancing the loss. Recommended value is 5.0. "
"More details here: https://arxiv.org/abs/2303.09556.",
)
parser.add_argument(
"--pre_compute_text_embeddings",
action="store_true",
help="Whether or not to pre-compute text embeddings. If text embeddings are pre-computed, the text encoder will not be kept in memory during training and will leave more GPU memory available for training the rest of the model. This is not compatible with `--train_text_encoder`.",
)
parser.add_argument(
"--tokenizer_max_length",
type=int,
default=None,
required=False,
help="The maximum length of the tokenizer. If not set, will default to the tokenizer's max length.",
)
parser.add_argument(
"--text_encoder_use_attention_mask",
action="store_true",
required=False,
help="Whether to use attention mask for the text encoder",
)
parser.add_argument(
"--skip_save_text_encoder", action="store_true", required=False, help="Set to not save text encoder"
)
parser.add_argument(
"--validation_images",
required=False,
default=None,
nargs="+",
help="Optional set of images to use for validation. Used when the target pipeline takes an initial image as input such as when training image variation or superresolution.",
)
parser.add_argument(
"--class_labels_conditioning",
required=False,
default=None,
help="The optional `class_label` conditioning to pass to the unet, available values are `timesteps`.",
)
parser.add_argument(
"--validation_scheduler",
type=str,
default="DPMSolverMultistepScheduler",
choices=["DPMSolverMultistepScheduler", "DDPMScheduler"],
help="Select which scheduler to use for validation. DDPMScheduler is recommended for DeepFloyd IF.",
)
if input_args is not None:
args = parser.parse_args(input_args)
else:
args = parser.parse_args()
env_local_rank = int(os.environ.get("LOCAL_RANK", -1))
if env_local_rank != -1 and env_local_rank != args.local_rank:
args.local_rank = env_local_rank
if args.with_prior_preservation:
if args.class_data_dir is None:
raise ValueError("You must specify a data directory for class images.")
if args.class_prompt is None:
raise ValueError("You must specify prompt for class images.")
else:
# logger is not available yet
if args.class_data_dir is not None:
warnings.warn("You need not use --class_data_dir without --with_prior_preservation.")
if args.class_prompt is not None:
warnings.warn("You need not use --class_prompt without --with_prior_preservation.")
if args.train_text_encoder and args.pre_compute_text_embeddings:
raise ValueError("`--train_text_encoder` cannot be used with `--pre_compute_text_embeddings`")
return args
class DreamBoothDataset(Dataset):
"""
A dataset to prepare the instance and class images with the prompts for fine-tuning the model.
It pre-processes the images and the tokenizes prompts.
"""
def __init__(
self,
instance_data_root,
instance_prompt,
tokenizer,
class_data_root=None,
class_prompt=None,
class_num=None,
size=512,
center_crop=False,
encoder_hidden_states=None,
class_prompt_encoder_hidden_states=None,
tokenizer_max_length=None,
):
self.size = size
self.center_crop = center_crop
self.tokenizer = tokenizer
self.encoder_hidden_states = encoder_hidden_states
self.class_prompt_encoder_hidden_states = class_prompt_encoder_hidden_states
self.tokenizer_max_length = tokenizer_max_length
self.instance_data_root = Path(instance_data_root)
if not self.instance_data_root.exists():
raise ValueError(f"Instance {self.instance_data_root} images root doesn't exists.")
self.instance_images_path = list(Path(instance_data_root).iterdir())
self.num_instance_images = len(self.instance_images_path)
self.instance_prompt = instance_prompt
self._length = self.num_instance_images
if class_data_root is not None:
self.class_data_root = Path(class_data_root)
self.class_data_root.mkdir(parents=True, exist_ok=True)
self.class_images_path = list(self.class_data_root.iterdir())
if class_num is not None:
self.num_class_images = min(len(self.class_images_path), class_num)
else:
self.num_class_images = len(self.class_images_path)
self._length = max(self.num_class_images, self.num_instance_images)
self.class_prompt = class_prompt
else:
self.class_data_root = None
self.image_transforms = transforms.Compose(
[
transforms.Resize(size, interpolation=transforms.InterpolationMode.BILINEAR),
transforms.CenterCrop(size) if center_crop else transforms.RandomCrop(size),
transforms.ToTensor(),
transforms.Normalize([0.5], [0.5]),
]
)
def __len__(self):
return self._length
def __getitem__(self, index):
example = {}
instance_image = Image.open(self.instance_images_path[index % self.num_instance_images])
instance_image = exif_transpose(instance_image)
if not instance_image.mode == "RGB":
instance_image = instance_image.convert("RGB")
example["instance_images"] = self.image_transforms(instance_image)
if self.encoder_hidden_states is not None:
example["instance_prompt_ids"] = self.encoder_hidden_states
else:
text_inputs = tokenize_prompt(
self.tokenizer, self.instance_prompt, tokenizer_max_length=self.tokenizer_max_length
)
example["instance_prompt_ids"] = text_inputs.input_ids
example["instance_attention_mask"] = text_inputs.attention_mask
if self.class_data_root:
class_image = Image.open(self.class_images_path[index % self.num_class_images])
class_image = exif_transpose(class_image)
if not class_image.mode == "RGB":
class_image = class_image.convert("RGB")
example["class_images"] = self.image_transforms(class_image)
if self.class_prompt_encoder_hidden_states is not None:
example["class_prompt_ids"] = self.class_prompt_encoder_hidden_states
else:
class_text_inputs = tokenize_prompt(
self.tokenizer, self.class_prompt, tokenizer_max_length=self.tokenizer_max_length
)
example["class_prompt_ids"] = class_text_inputs.input_ids
example["class_attention_mask"] = class_text_inputs.attention_mask
return example
def collate_fn(examples, with_prior_preservation=False):
has_attention_mask = "instance_attention_mask" in examples[0]
input_ids = [example["instance_prompt_ids"] for example in examples]
pixel_values = [example["instance_images"] for example in examples]
if has_attention_mask:
attention_mask = [example["instance_attention_mask"] for example in examples]
# Concat class and instance examples for prior preservation.
# We do this to avoid doing two forward passes.
if with_prior_preservation:
input_ids += [example["class_prompt_ids"] for example in examples]
pixel_values += [example["class_images"] for example in examples]
if has_attention_mask:
attention_mask += [example["class_attention_mask"] for example in examples]
pixel_values = torch.stack(pixel_values)
pixel_values = pixel_values.to(memory_format=torch.contiguous_format).float()
input_ids = torch.cat(input_ids, dim=0)
batch = {
"input_ids": input_ids,
"pixel_values": pixel_values,
}
if has_attention_mask:
attention_mask = torch.cat(attention_mask, dim=0)
batch["attention_mask"] = attention_mask
return batch
class PromptDataset(Dataset):
"A simple dataset to prepare the prompts to generate class images on multiple GPUs."
def __init__(self, prompt, num_samples):
self.prompt = prompt
self.num_samples = num_samples
def __len__(self):
return self.num_samples
def __getitem__(self, index):
example = {}
example["prompt"] = self.prompt
example["index"] = index
return example
def model_has_vae(args):
config_file_name = os.path.join("vae", AutoencoderKL.config_name)
if os.path.isdir(args.pretrained_model_name_or_path):
config_file_name = os.path.join(args.pretrained_model_name_or_path, config_file_name)
return os.path.isfile(config_file_name)
else:
files_in_repo = model_info(args.pretrained_model_name_or_path, revision=args.revision).siblings
return any(file.rfilename == config_file_name for file in files_in_repo)
def tokenize_prompt(tokenizer, prompt, tokenizer_max_length=None):
if tokenizer_max_length is not None:
max_length = tokenizer_max_length
else:
max_length = tokenizer.model_max_length
text_inputs = tokenizer(
prompt,
truncation=True,
padding="max_length",
max_length=max_length,
return_tensors="pt",
)
return text_inputs
def encode_prompt(text_encoder, input_ids, attention_mask, text_encoder_use_attention_mask=None):
text_input_ids = input_ids.to(text_encoder.device)
if text_encoder_use_attention_mask:
attention_mask = attention_mask.to(text_encoder.device)
else:
attention_mask = None
prompt_embeds = text_encoder(
text_input_ids,
attention_mask=attention_mask,
return_dict=False,
)
prompt_embeds = prompt_embeds[0]
return prompt_embeds
def main(args):
logging_dir = Path(args.output_dir, args.logging_dir)
accelerator_project_config = ProjectConfiguration(project_dir=args.output_dir, logging_dir=logging_dir)
accelerator = Accelerator(
gradient_accumulation_steps=args.gradient_accumulation_steps,
mixed_precision=args.mixed_precision,
log_with=args.report_to,
project_config=accelerator_project_config,
)
if args.report_to == "wandb":
if not is_wandb_available():
raise ImportError("Make sure to install wandb if you want to use it for logging during training.")
# Currently, it's not possible to do gradient accumulation when training two models with accelerate.accumulate
# This will be enabled soon in accelerate. For now, we don't allow gradient accumulation when training two models.
# TODO (patil-suraj): Remove this check when gradient accumulation with two models is enabled in accelerate.
if args.train_text_encoder and args.gradient_accumulation_steps > 1 and accelerator.num_processes > 1:
raise ValueError(
"Gradient accumulation is not supported when training the text encoder in distributed training. "
"Please set gradient_accumulation_steps to 1. This feature will be supported in the future."
)
# Make one log on every process with the configuration for debugging.
logging.basicConfig(
format="%(asctime)s - %(levelname)s - %(name)s - %(message)s",
datefmt="%m/%d/%Y %H:%M:%S",
level=logging.INFO,
)
logger.info(accelerator.state, main_process_only=False)
if accelerator.is_local_main_process:
transformers.utils.logging.set_verbosity_warning()
diffusers.utils.logging.set_verbosity_info()
else:
transformers.utils.logging.set_verbosity_error()
diffusers.utils.logging.set_verbosity_error()
# If passed along, set the training seed now.
if args.seed is not None:
set_seed(args.seed)
# Generate class images if prior preservation is enabled.
if args.with_prior_preservation:
class_images_dir = Path(args.class_data_dir)
if not class_images_dir.exists():
class_images_dir.mkdir(parents=True)
cur_class_images = len(list(class_images_dir.iterdir()))
if cur_class_images < args.num_class_images:
torch_dtype = torch.float16 if accelerator.device.type == "cuda" else torch.float32
if args.prior_generation_precision == "fp32":
torch_dtype = torch.float32
elif args.prior_generation_precision == "fp16":
torch_dtype = torch.float16
elif args.prior_generation_precision == "bf16":
torch_dtype = torch.bfloat16
pipeline = DiffusionPipeline.from_pretrained(
args.pretrained_model_name_or_path,
torch_dtype=torch_dtype,
safety_checker=None,
revision=args.revision,
variant=args.variant,
)
pipeline.set_progress_bar_config(disable=True)
num_new_images = args.num_class_images - cur_class_images
logger.info(f"Number of class images to sample: {num_new_images}.")
sample_dataset = PromptDataset(args.class_prompt, num_new_images)
sample_dataloader = torch.utils.data.DataLoader(sample_dataset, batch_size=args.sample_batch_size)
sample_dataloader = accelerator.prepare(sample_dataloader)
pipeline.to(accelerator.device)
for example in tqdm(
sample_dataloader, desc="Generating class images", disable=not accelerator.is_local_main_process
):
images = pipeline(example["prompt"]).images
for i, image in enumerate(images):
hash_image = insecure_hashlib.sha1(image.tobytes()).hexdigest()
image_filename = class_images_dir / f"{example['index'][i] + cur_class_images}-{hash_image}.jpg"
image.save(image_filename)
del pipeline
if torch.cuda.is_available():
torch.cuda.empty_cache()
# Handle the repository creation
if accelerator.is_main_process:
if args.output_dir is not None:
os.makedirs(args.output_dir, exist_ok=True)
if args.push_to_hub:
repo_id = create_repo(
repo_id=args.hub_model_id or Path(args.output_dir).name, exist_ok=True, token=args.hub_token
).repo_id
# Load the tokenizer
if args.tokenizer_name:
tokenizer = AutoTokenizer.from_pretrained(args.tokenizer_name, revision=args.revision, use_fast=False)
elif args.pretrained_model_name_or_path:
tokenizer = AutoTokenizer.from_pretrained(
args.pretrained_model_name_or_path,
subfolder="tokenizer",
revision=args.revision,
use_fast=False,
)
# import correct text encoder class
text_encoder_cls = import_model_class_from_model_name_or_path(args.pretrained_model_name_or_path, args.revision)
# Load scheduler and models
noise_scheduler = DDPMScheduler.from_pretrained(args.pretrained_model_name_or_path, subfolder="scheduler")
text_encoder = text_encoder_cls.from_pretrained(
args.pretrained_model_name_or_path, subfolder="text_encoder", revision=args.revision, variant=args.variant
)
if model_has_vae(args):
vae = AutoencoderKL.from_pretrained(
args.pretrained_model_name_or_path, subfolder="vae", revision=args.revision, variant=args.variant
)
else:
vae = None
unet = UNet2DConditionModel.from_pretrained(
args.pretrained_model_name_or_path, subfolder="unet", revision=args.revision, variant=args.variant
)
def unwrap_model(model):
model = accelerator.unwrap_model(model)
model = model._orig_mod if is_compiled_module(model) else model
return model
# create custom saving & loading hooks so that `accelerator.save_state(...)` serializes in a nice format
def save_model_hook(models, weights, output_dir):
if accelerator.is_main_process:
for model in models:
sub_dir = "unet" if isinstance(model, type(unwrap_model(unet))) else "text_encoder"
model.save_pretrained(os.path.join(output_dir, sub_dir))
# make sure to pop weight so that corresponding model is not saved again
weights.pop()
def load_model_hook(models, input_dir):
while len(models) > 0:
# pop models so that they are not loaded again
model = models.pop()
if isinstance(model, type(unwrap_model(text_encoder))):
# load transformers style into model
load_model = text_encoder_cls.from_pretrained(input_dir, subfolder="text_encoder")
model.config = load_model.config
else:
# load diffusers style into model
load_model = UNet2DConditionModel.from_pretrained(input_dir, subfolder="unet")
model.register_to_config(**load_model.config)
model.load_state_dict(load_model.state_dict())
del load_model
accelerator.register_save_state_pre_hook(save_model_hook)
accelerator.register_load_state_pre_hook(load_model_hook)
if vae is not None:
vae.requires_grad_(False)
if not args.train_text_encoder:
text_encoder.requires_grad_(False)
if args.enable_xformers_memory_efficient_attention:
if is_xformers_available():
import xformers
xformers_version = version.parse(xformers.__version__)
if xformers_version == version.parse("0.0.16"):
logger.warn(
"xFormers 0.0.16 cannot be used for training in some GPUs. If you observe problems during training, please update xFormers to at least 0.0.17. See https://huggingface.co/docs/diffusers/main/en/optimization/xformers for more details."
)
unet.enable_xformers_memory_efficient_attention()
else:
raise ValueError("xformers is not available. Make sure it is installed correctly")
if args.gradient_checkpointing:
unet.enable_gradient_checkpointing()
if args.train_text_encoder:
text_encoder.gradient_checkpointing_enable()
# Check that all trainable models are in full precision
low_precision_error_string = (
"Please make sure to always have all model weights in full float32 precision when starting training - even if"
" doing mixed precision training. copy of the weights should still be float32."
)
if unwrap_model(unet).dtype != torch.float32:
raise ValueError(f"Unet loaded as datatype {unwrap_model(unet).dtype}. {low_precision_error_string}")
if args.train_text_encoder and unwrap_model(text_encoder).dtype != torch.float32:
raise ValueError(
f"Text encoder loaded as datatype {unwrap_model(text_encoder).dtype}." f" {low_precision_error_string}"
)
# Enable TF32 for faster training on Ampere GPUs,
# cf https://pytorch.org/docs/stable/notes/cuda.html#tensorfloat-32-tf32-on-ampere-devices
if args.allow_tf32:
torch.backends.cuda.matmul.allow_tf32 = True
if args.scale_lr:
args.learning_rate = (
args.learning_rate * args.gradient_accumulation_steps * args.train_batch_size * accelerator.num_processes
)
# Use 8-bit Adam for lower memory usage or to fine-tune the model in 16GB GPUs
if args.use_8bit_adam:
try:
import bitsandbytes as bnb
except ImportError:
raise ImportError(
"To use 8-bit Adam, please install the bitsandbytes library: `pip install bitsandbytes`."
)
optimizer_class = bnb.optim.AdamW8bit
else:
optimizer_class = torch.optim.AdamW
# Optimizer creation
params_to_optimize = (
itertools.chain(unet.parameters(), text_encoder.parameters()) if args.train_text_encoder else unet.parameters()
)
optimizer = optimizer_class(
params_to_optimize,
lr=args.learning_rate,
betas=(args.adam_beta1, args.adam_beta2),
weight_decay=args.adam_weight_decay,
eps=args.adam_epsilon,
)
if args.pre_compute_text_embeddings:
def compute_text_embeddings(prompt):
with torch.no_grad():
text_inputs = tokenize_prompt(tokenizer, prompt, tokenizer_max_length=args.tokenizer_max_length)
prompt_embeds = encode_prompt(
text_encoder,
text_inputs.input_ids,
text_inputs.attention_mask,
text_encoder_use_attention_mask=args.text_encoder_use_attention_mask,
)
return prompt_embeds
pre_computed_encoder_hidden_states = compute_text_embeddings(args.instance_prompt)
validation_prompt_negative_prompt_embeds = compute_text_embeddings("")
if args.validation_prompt is not None:
validation_prompt_encoder_hidden_states = compute_text_embeddings(args.validation_prompt)
else:
validation_prompt_encoder_hidden_states = None
if args.class_prompt is not None:
pre_computed_class_prompt_encoder_hidden_states = compute_text_embeddings(args.class_prompt)
else:
pre_computed_class_prompt_encoder_hidden_states = None
text_encoder = None
tokenizer = None
gc.collect()
torch.cuda.empty_cache()
else:
pre_computed_encoder_hidden_states = None
validation_prompt_encoder_hidden_states = None
validation_prompt_negative_prompt_embeds = None
pre_computed_class_prompt_encoder_hidden_states = None
# Dataset and DataLoaders creation:
train_dataset = DreamBoothDataset(
instance_data_root=args.instance_data_dir,
instance_prompt=args.instance_prompt,
class_data_root=args.class_data_dir if args.with_prior_preservation else None,
class_prompt=args.class_prompt,
class_num=args.num_class_images,
tokenizer=tokenizer,
size=args.resolution,
center_crop=args.center_crop,
encoder_hidden_states=pre_computed_encoder_hidden_states,
class_prompt_encoder_hidden_states=pre_computed_class_prompt_encoder_hidden_states,
tokenizer_max_length=args.tokenizer_max_length,
)
train_dataloader = torch.utils.data.DataLoader(
train_dataset,
batch_size=args.train_batch_size,
shuffle=True,
collate_fn=lambda examples: collate_fn(examples, args.with_prior_preservation),
num_workers=args.dataloader_num_workers,
)
# Scheduler and math around the number of training steps.
overrode_max_train_steps = False
num_update_steps_per_epoch = math.ceil(len(train_dataloader) / args.gradient_accumulation_steps)
if args.max_train_steps is None:
args.max_train_steps = args.num_train_epochs * num_update_steps_per_epoch
overrode_max_train_steps = True
lr_scheduler = get_scheduler(
args.lr_scheduler,
optimizer=optimizer,
num_warmup_steps=args.lr_warmup_steps * accelerator.num_processes,
num_training_steps=args.max_train_steps * accelerator.num_processes,
num_cycles=args.lr_num_cycles,
power=args.lr_power,
)
# Prepare everything with our `accelerator`.
if args.train_text_encoder:
unet, text_encoder, optimizer, train_dataloader, lr_scheduler = accelerator.prepare(
unet, text_encoder, optimizer, train_dataloader, lr_scheduler
)
else:
unet, optimizer, train_dataloader, lr_scheduler = accelerator.prepare(
unet, optimizer, train_dataloader, lr_scheduler
)
# For mixed precision training we cast all non-trainable weights (vae, non-lora text_encoder and non-lora unet) to half-precision
# as these weights are only used for inference, keeping weights in full precision is not required.
weight_dtype = torch.float32
if accelerator.mixed_precision == "fp16":
weight_dtype = torch.float16
elif accelerator.mixed_precision == "bf16":
weight_dtype = torch.bfloat16
# Move vae and text_encoder to device and cast to weight_dtype
if vae is not None:
vae.to(accelerator.device, dtype=weight_dtype)
if not args.train_text_encoder and text_encoder is not None:
text_encoder.to(accelerator.device, dtype=weight_dtype)
# We need to recalculate our total training steps as the size of the training dataloader may have changed.
num_update_steps_per_epoch = math.ceil(len(train_dataloader) / args.gradient_accumulation_steps)
if overrode_max_train_steps:
args.max_train_steps = args.num_train_epochs * num_update_steps_per_epoch
# Afterwards we recalculate our number of training epochs
args.num_train_epochs = math.ceil(args.max_train_steps / num_update_steps_per_epoch)
# We need to initialize the trackers we use, and also store our configuration.
# The trackers initializes automatically on the main process.
if accelerator.is_main_process:
tracker_config = vars(copy.deepcopy(args))
tracker_config.pop("validation_images")
accelerator.init_trackers("dreambooth", config=tracker_config)
# Train!
total_batch_size = args.train_batch_size * accelerator.num_processes * args.gradient_accumulation_steps
logger.info("***** Running training *****")
logger.info(f" Num examples = {len(train_dataset)}")
logger.info(f" Num batches each epoch = {len(train_dataloader)}")
logger.info(f" Num Epochs = {args.num_train_epochs}")
logger.info(f" Instantaneous batch size per device = {args.train_batch_size}")
logger.info(f" Total train batch size (w. parallel, distributed & accumulation) = {total_batch_size}")
logger.info(f" Gradient Accumulation steps = {args.gradient_accumulation_steps}")
logger.info(f" Total optimization steps = {args.max_train_steps}")
global_step = 0
first_epoch = 0
# Potentially load in the weights and states from a previous save
if args.resume_from_checkpoint:
if args.resume_from_checkpoint != "latest":
path = os.path.basename(args.resume_from_checkpoint)
else:
# Get the most recent checkpoint
dirs = os.listdir(args.output_dir)
dirs = [d for d in dirs if d.startswith("checkpoint")]
dirs = sorted(dirs, key=lambda x: int(x.split("-")[1]))
path = dirs[-1] if len(dirs) > 0 else None
if path is None:
accelerator.print(
f"Checkpoint '{args.resume_from_checkpoint}' does not exist. Starting a new training run."
)
args.resume_from_checkpoint = None
initial_global_step = 0
else:
accelerator.print(f"Resuming from checkpoint {path}")
accelerator.load_state(os.path.join(args.output_dir, path))
global_step = int(path.split("-")[1])
initial_global_step = global_step
first_epoch = global_step // num_update_steps_per_epoch
else:
initial_global_step = 0
progress_bar = tqdm(
range(0, args.max_train_steps),
initial=initial_global_step,
desc="Steps",
# Only show the progress bar once on each machine.
disable=not accelerator.is_local_main_process,
)
for epoch in range(first_epoch, args.num_train_epochs):
unet.train()
if args.train_text_encoder:
text_encoder.train()
for step, batch in enumerate(train_dataloader):
with accelerator.accumulate(unet):
pixel_values = batch["pixel_values"].to(dtype=weight_dtype)
if vae is not None:
# Convert images to latent space
model_input = vae.encode(batch["pixel_values"].to(dtype=weight_dtype)).latent_dist.sample()
model_input = model_input * vae.config.scaling_factor
else:
model_input = pixel_values
# Sample noise that we'll add to the model input
if args.offset_noise:
noise = torch.randn_like(model_input) + 0.1 * torch.randn(
model_input.shape[0], model_input.shape[1], 1, 1, device=model_input.device
)
else:
noise = torch.randn_like(model_input)
bsz, channels, height, width = model_input.shape
# Sample a random timestep for each image
timesteps = torch.randint(
0, noise_scheduler.config.num_train_timesteps, (bsz,), device=model_input.device
)
timesteps = timesteps.long()
# Add noise to the model input according to the noise magnitude at each timestep
# (this is the forward diffusion process)
noisy_model_input = noise_scheduler.add_noise(model_input, noise, timesteps)
# Get the text embedding for conditioning
if args.pre_compute_text_embeddings:
encoder_hidden_states = batch["input_ids"]
else:
encoder_hidden_states = encode_prompt(
text_encoder,
batch["input_ids"],
batch["attention_mask"],
text_encoder_use_attention_mask=args.text_encoder_use_attention_mask,
)
if unwrap_model(unet).config.in_channels == channels * 2:
noisy_model_input = torch.cat([noisy_model_input, noisy_model_input], dim=1)
if args.class_labels_conditioning == "timesteps":
class_labels = timesteps
else:
class_labels = None
# Predict the noise residual
model_pred = unet(
noisy_model_input, timesteps, encoder_hidden_states, class_labels=class_labels, return_dict=False
)[0]
if model_pred.shape[1] == 6:
model_pred, _ = torch.chunk(model_pred, 2, dim=1)
# Get the target for loss depending on the prediction type
if noise_scheduler.config.prediction_type == "epsilon":
target = noise
elif noise_scheduler.config.prediction_type == "v_prediction":
target = noise_scheduler.get_velocity(model_input, noise, timesteps)
else:
raise ValueError(f"Unknown prediction type {noise_scheduler.config.prediction_type}")
if args.with_prior_preservation:
# Chunk the noise and model_pred into two parts and compute the loss on each part separately.
model_pred, model_pred_prior = torch.chunk(model_pred, 2, dim=0)
target, target_prior = torch.chunk(target, 2, dim=0)
# Compute prior loss
prior_loss = F.mse_loss(model_pred_prior.float(), target_prior.float(), reduction="mean")
# Compute instance loss
if args.snr_gamma is None:
loss = F.mse_loss(model_pred.float(), target.float(), reduction="mean")
else:
# Compute loss-weights as per Section 3.4 of https://arxiv.org/abs/2303.09556.
# Since we predict the noise instead of x_0, the original formulation is slightly changed.
# This is discussed in Section 4.2 of the same paper.
snr = compute_snr(noise_scheduler, timesteps)
base_weight = (
torch.stack([snr, args.snr_gamma * torch.ones_like(timesteps)], dim=1).min(dim=1)[0] / snr
)
if noise_scheduler.config.prediction_type == "v_prediction":
# Velocity objective needs to be floored to an SNR weight of one.
mse_loss_weights = base_weight + 1
else:
# Epsilon and sample both use the same loss weights.
mse_loss_weights = base_weight
loss = F.mse_loss(model_pred.float(), target.float(), reduction="none")
loss = loss.mean(dim=list(range(1, len(loss.shape)))) * mse_loss_weights
loss = loss.mean()
if args.with_prior_preservation:
# Add the prior loss to the instance loss.
loss = loss + args.prior_loss_weight * prior_loss
accelerator.backward(loss)
if accelerator.sync_gradients:
params_to_clip = (
itertools.chain(unet.parameters(), text_encoder.parameters())
if args.train_text_encoder
else unet.parameters()
)
accelerator.clip_grad_norm_(params_to_clip, args.max_grad_norm)
optimizer.step()
lr_scheduler.step()
optimizer.zero_grad(set_to_none=args.set_grads_to_none)
# Checks if the accelerator has performed an optimization step behind the scenes
if accelerator.sync_gradients:
progress_bar.update(1)
global_step += 1
if accelerator.is_main_process:
if global_step % args.checkpointing_steps == 0:
# _before_ saving state, check if this save would set us over the `checkpoints_total_limit`
if args.checkpoints_total_limit is not None:
checkpoints = os.listdir(args.output_dir)
checkpoints = [d for d in checkpoints if d.startswith("checkpoint")]
checkpoints = sorted(checkpoints, key=lambda x: int(x.split("-")[1]))
# before we save the new checkpoint, we need to have at _most_ `checkpoints_total_limit - 1` checkpoints
if len(checkpoints) >= args.checkpoints_total_limit:
num_to_remove = len(checkpoints) - args.checkpoints_total_limit + 1
removing_checkpoints = checkpoints[0:num_to_remove]
logger.info(
f"{len(checkpoints)} checkpoints already exist, removing {len(removing_checkpoints)} checkpoints"
)
logger.info(f"removing checkpoints: {', '.join(removing_checkpoints)}")
for removing_checkpoint in removing_checkpoints:
removing_checkpoint = os.path.join(args.output_dir, removing_checkpoint)
shutil.rmtree(removing_checkpoint)
save_path = os.path.join(args.output_dir, f"checkpoint-{global_step}")
accelerator.save_state(save_path)
logger.info(f"Saved state to {save_path}")
images = []
if args.validation_prompt is not None and global_step % args.validation_steps == 0:
images = log_validation(
unwrap_model(text_encoder) if text_encoder is not None else text_encoder,
tokenizer,
unwrap_model(unet),
vae,
args,
accelerator,
weight_dtype,
global_step,
validation_prompt_encoder_hidden_states,
validation_prompt_negative_prompt_embeds,
)
logs = {"loss": loss.detach().item(), "lr": lr_scheduler.get_last_lr()[0]}
progress_bar.set_postfix(**logs)
accelerator.log(logs, step=global_step)
if global_step >= args.max_train_steps:
break
# Create the pipeline using the trained modules and save it.
accelerator.wait_for_everyone()
if accelerator.is_main_process:
pipeline_args = {}
if text_encoder is not None:
pipeline_args["text_encoder"] = unwrap_model(text_encoder)
if args.skip_save_text_encoder:
pipeline_args["text_encoder"] = None
pipeline = DiffusionPipeline.from_pretrained(
args.pretrained_model_name_or_path,
unet=unwrap_model(unet),
revision=args.revision,
variant=args.variant,
**pipeline_args,
)
# We train on the simplified learning objective. If we were previously predicting a variance, we need the scheduler to ignore it
scheduler_args = {}
if "variance_type" in pipeline.scheduler.config:
variance_type = pipeline.scheduler.config.variance_type
if variance_type in ["learned", "learned_range"]:
variance_type = "fixed_small"
scheduler_args["variance_type"] = variance_type
pipeline.scheduler = pipeline.scheduler.from_config(pipeline.scheduler.config, **scheduler_args)
pipeline.save_pretrained(args.output_dir)
if args.push_to_hub:
save_model_card(
repo_id,
images=images,
base_model=args.pretrained_model_name_or_path,
train_text_encoder=args.train_text_encoder,
prompt=args.instance_prompt,
repo_folder=args.output_dir,
pipeline=pipeline,
)
upload_folder(
repo_id=repo_id,
folder_path=args.output_dir,
commit_message="End of training",
ignore_patterns=["step_*", "epoch_*"],
)
accelerator.end_training()
if __name__ == "__main__":
args = parse_args()
main(args)
| diffusers/examples/dreambooth/train_dreambooth.py/0 | {
"file_path": "diffusers/examples/dreambooth/train_dreambooth.py",
"repo_id": "diffusers",
"token_count": 25066
} | 96 |
# coding=utf-8
# Copyright 2023 The HuggingFace Inc. team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
"""Fine-tuning script for Kandinsky with support for LoRA."""
import argparse
import logging
import math
import os
import shutil
from pathlib import Path
import datasets
import numpy as np
import torch
import torch.nn.functional as F
import torch.utils.checkpoint
import transformers
from accelerate import Accelerator
from accelerate.logging import get_logger
from accelerate.utils import ProjectConfiguration, set_seed
from datasets import load_dataset
from huggingface_hub import create_repo, upload_folder
from PIL import Image
from tqdm import tqdm
from transformers import CLIPImageProcessor, CLIPVisionModelWithProjection
import diffusers
from diffusers import AutoPipelineForText2Image, DDPMScheduler, UNet2DConditionModel, VQModel
from diffusers.loaders import AttnProcsLayers
from diffusers.models.attention_processor import LoRAAttnAddedKVProcessor
from diffusers.optimization import get_scheduler
from diffusers.training_utils import compute_snr
from diffusers.utils import check_min_version, is_wandb_available
# Will error if the minimal version of diffusers is not installed. Remove at your own risks.
check_min_version("0.26.0.dev0")
logger = get_logger(__name__, log_level="INFO")
def save_model_card(repo_id: str, images=None, base_model=str, dataset_name=str, repo_folder=None):
img_str = ""
for i, image in enumerate(images):
image.save(os.path.join(repo_folder, f"image_{i}.png"))
img_str += f"\n"
yaml = f"""
---
license: creativeml-openrail-m
base_model: {base_model}
tags:
- kandinsky
- text-to-image
- diffusers
- lora
inference: true
---
"""
model_card = f"""
# LoRA text2image fine-tuning - {repo_id}
These are LoRA adaption weights for {base_model}. The weights were fine-tuned on the {dataset_name} dataset. You can find some example images in the following. \n
{img_str}
"""
with open(os.path.join(repo_folder, "README.md"), "w") as f:
f.write(yaml + model_card)
def parse_args():
parser = argparse.ArgumentParser(description="Simple example of finetuning Kandinsky 2.2 with LoRA.")
parser.add_argument(
"--pretrained_decoder_model_name_or_path",
type=str,
default="kandinsky-community/kandinsky-2-2-decoder",
required=False,
help="Path to pretrained model or model identifier from huggingface.co/models.",
)
parser.add_argument(
"--pretrained_prior_model_name_or_path",
type=str,
default="kandinsky-community/kandinsky-2-2-prior",
required=False,
help="Path to pretrained model or model identifier from huggingface.co/models.",
)
parser.add_argument(
"--dataset_name",
type=str,
default=None,
help=(
"The name of the Dataset (from the HuggingFace hub) to train on (could be your own, possibly private,"
" dataset). It can also be a path pointing to a local copy of a dataset in your filesystem,"
" or to a folder containing files that 🤗 Datasets can understand."
),
)
parser.add_argument(
"--dataset_config_name",
type=str,
default=None,
help="The config of the Dataset, leave as None if there's only one config.",
)
parser.add_argument(
"--train_data_dir",
type=str,
default=None,
help=(
"A folder containing the training data. Folder contents must follow the structure described in"
" https://huggingface.co/docs/datasets/image_dataset#imagefolder. In particular, a `metadata.jsonl` file"
" must exist to provide the captions for the images. Ignored if `dataset_name` is specified."
),
)
parser.add_argument(
"--image_column", type=str, default="image", help="The column of the dataset containing an image."
)
parser.add_argument(
"--validation_prompt", type=str, default=None, help="A prompt that is sampled during training for inference."
)
parser.add_argument(
"--num_validation_images",
type=int,
default=4,
help="Number of images that should be generated during validation with `validation_prompt`.",
)
parser.add_argument(
"--validation_epochs",
type=int,
default=1,
help=(
"Run fine-tuning validation every X epochs. The validation process consists of running the prompt"
" `args.validation_prompt` multiple times: `args.num_validation_images`."
),
)
parser.add_argument(
"--max_train_samples",
type=int,
default=None,
help=(
"For debugging purposes or quicker training, truncate the number of training examples to this "
"value if set."
),
)
parser.add_argument(
"--output_dir",
type=str,
default="kandi_2_2-model-finetuned-lora",
help="The output directory where the model predictions and checkpoints will be written.",
)
parser.add_argument(
"--cache_dir",
type=str,
default=None,
help="The directory where the downloaded models and datasets will be stored.",
)
parser.add_argument("--seed", type=int, default=None, help="A seed for reproducible training.")
parser.add_argument(
"--resolution",
type=int,
default=512,
help=(
"The resolution for input images, all the images in the train/validation dataset will be resized to this"
" resolution"
),
)
parser.add_argument(
"--train_batch_size", type=int, default=1, help="Batch size (per device) for the training dataloader."
)
parser.add_argument("--num_train_epochs", type=int, default=100)
parser.add_argument(
"--max_train_steps",
type=int,
default=None,
help="Total number of training steps to perform. If provided, overrides num_train_epochs.",
)
parser.add_argument(
"--gradient_accumulation_steps",
type=int,
default=1,
help="Number of updates steps to accumulate before performing a backward/update pass.",
)
parser.add_argument(
"--gradient_checkpointing",
action="store_true",
help="Whether or not to use gradient checkpointing to save memory at the expense of slower backward pass.",
)
parser.add_argument(
"--learning_rate",
type=float,
default=1e-4,
help="Initial learning rate (after the potential warmup period) to use.",
)
parser.add_argument(
"--lr_scheduler",
type=str,
default="constant",
help=(
'The scheduler type to use. Choose between ["linear", "cosine", "cosine_with_restarts", "polynomial",'
' "constant", "constant_with_warmup"]'
),
)
parser.add_argument(
"--lr_warmup_steps", type=int, default=500, help="Number of steps for the warmup in the lr scheduler."
)
parser.add_argument(
"--snr_gamma",
type=float,
default=None,
help="SNR weighting gamma to be used if rebalancing the loss. Recommended value is 5.0. "
"More details here: https://arxiv.org/abs/2303.09556.",
)
parser.add_argument(
"--use_8bit_adam", action="store_true", help="Whether or not to use 8-bit Adam from bitsandbytes."
)
parser.add_argument(
"--allow_tf32",
action="store_true",
help=(
"Whether or not to allow TF32 on Ampere GPUs. Can be used to speed up training. For more information, see"
" https://pytorch.org/docs/stable/notes/cuda.html#tensorfloat-32-tf32-on-ampere-devices"
),
)
parser.add_argument(
"--dataloader_num_workers",
type=int,
default=0,
help=(
"Number of subprocesses to use for data loading. 0 means that the data will be loaded in the main process."
),
)
parser.add_argument("--adam_beta1", type=float, default=0.9, help="The beta1 parameter for the Adam optimizer.")
parser.add_argument("--adam_beta2", type=float, default=0.999, help="The beta2 parameter for the Adam optimizer.")
parser.add_argument("--adam_weight_decay", type=float, default=0.0, help="Weight decay to use.")
parser.add_argument("--adam_epsilon", type=float, default=1e-08, help="Epsilon value for the Adam optimizer")
parser.add_argument("--max_grad_norm", default=1.0, type=float, help="Max gradient norm.")
parser.add_argument("--push_to_hub", action="store_true", help="Whether or not to push the model to the Hub.")
parser.add_argument("--hub_token", type=str, default=None, help="The token to use to push to the Model Hub.")
parser.add_argument(
"--hub_model_id",
type=str,
default=None,
help="The name of the repository to keep in sync with the local `output_dir`.",
)
parser.add_argument(
"--logging_dir",
type=str,
default="logs",
help=(
"[TensorBoard](https://www.tensorflow.org/tensorboard) log directory. Will default to"
" *output_dir/runs/**CURRENT_DATETIME_HOSTNAME***."
),
)
parser.add_argument(
"--mixed_precision",
type=str,
default=None,
choices=["no", "fp16", "bf16"],
help=(
"Whether to use mixed precision. Choose between fp16 and bf16 (bfloat16). Bf16 requires PyTorch >="
" 1.10.and an Nvidia Ampere GPU. Default to the value of accelerate config of the current system or the"
" flag passed with the `accelerate.launch` command. Use this argument to override the accelerate config."
),
)
parser.add_argument(
"--report_to",
type=str,
default="tensorboard",
help=(
'The integration to report the results and logs to. Supported platforms are `"tensorboard"`'
' (default), `"wandb"` and `"comet_ml"`. Use `"all"` to report to all integrations.'
),
)
parser.add_argument("--local_rank", type=int, default=-1, help="For distributed training: local_rank")
parser.add_argument(
"--checkpointing_steps",
type=int,
default=500,
help=(
"Save a checkpoint of the training state every X updates. These checkpoints are only suitable for resuming"
" training using `--resume_from_checkpoint`."
),
)
parser.add_argument(
"--checkpoints_total_limit",
type=int,
default=None,
help=("Max number of checkpoints to store."),
)
parser.add_argument(
"--resume_from_checkpoint",
type=str,
default=None,
help=(
"Whether training should be resumed from a previous checkpoint. Use a path saved by"
' `--checkpointing_steps`, or `"latest"` to automatically select the last available checkpoint.'
),
)
parser.add_argument(
"--rank",
type=int,
default=4,
help=("The dimension of the LoRA update matrices."),
)
args = parser.parse_args()
env_local_rank = int(os.environ.get("LOCAL_RANK", -1))
if env_local_rank != -1 and env_local_rank != args.local_rank:
args.local_rank = env_local_rank
# Sanity checks
if args.dataset_name is None and args.train_data_dir is None:
raise ValueError("Need either a dataset name or a training folder.")
return args
def main():
args = parse_args()
logging_dir = Path(args.output_dir, args.logging_dir)
accelerator_project_config = ProjectConfiguration(
total_limit=args.checkpoints_total_limit, project_dir=args.output_dir, logging_dir=logging_dir
)
accelerator = Accelerator(
gradient_accumulation_steps=args.gradient_accumulation_steps,
mixed_precision=args.mixed_precision,
log_with=args.report_to,
project_config=accelerator_project_config,
)
if args.report_to == "wandb":
if not is_wandb_available():
raise ImportError("Make sure to install wandb if you want to use it for logging during training.")
import wandb
# Make one log on every process with the configuration for debugging.
logging.basicConfig(
format="%(asctime)s - %(levelname)s - %(name)s - %(message)s",
datefmt="%m/%d/%Y %H:%M:%S",
level=logging.INFO,
)
logger.info(accelerator.state, main_process_only=False)
if accelerator.is_local_main_process:
datasets.utils.logging.set_verbosity_warning()
transformers.utils.logging.set_verbosity_warning()
diffusers.utils.logging.set_verbosity_info()
else:
datasets.utils.logging.set_verbosity_error()
transformers.utils.logging.set_verbosity_error()
diffusers.utils.logging.set_verbosity_error()
# If passed along, set the training seed now.
if args.seed is not None:
set_seed(args.seed)
# Handle the repository creation
if accelerator.is_main_process:
if args.output_dir is not None:
os.makedirs(args.output_dir, exist_ok=True)
if args.push_to_hub:
repo_id = create_repo(
repo_id=args.hub_model_id or Path(args.output_dir).name, exist_ok=True, token=args.hub_token
).repo_id
# Load scheduler, tokenizer and models.
noise_scheduler = DDPMScheduler.from_pretrained(args.pretrained_decoder_model_name_or_path, subfolder="scheduler")
image_processor = CLIPImageProcessor.from_pretrained(
args.pretrained_prior_model_name_or_path, subfolder="image_processor"
)
image_encoder = CLIPVisionModelWithProjection.from_pretrained(
args.pretrained_prior_model_name_or_path, subfolder="image_encoder"
)
vae = VQModel.from_pretrained(args.pretrained_decoder_model_name_or_path, subfolder="movq")
unet = UNet2DConditionModel.from_pretrained(args.pretrained_decoder_model_name_or_path, subfolder="unet")
# freeze parameters of models to save more memory
unet.requires_grad_(False)
vae.requires_grad_(False)
image_encoder.requires_grad_(False)
# For mixed precision training we cast all non-trainable weigths (vae, non-lora text_encoder and non-lora unet) to half-precision
# as these weights are only used for inference, keeping weights in full precision is not required.
weight_dtype = torch.float32
if accelerator.mixed_precision == "fp16":
weight_dtype = torch.float16
elif accelerator.mixed_precision == "bf16":
weight_dtype = torch.bfloat16
# Move unet, vae and text_encoder to device and cast to weight_dtype
unet.to(accelerator.device, dtype=weight_dtype)
vae.to(accelerator.device, dtype=weight_dtype)
image_encoder.to(accelerator.device, dtype=weight_dtype)
lora_attn_procs = {}
for name in unet.attn_processors.keys():
cross_attention_dim = None if name.endswith("attn1.processor") else unet.config.cross_attention_dim
if name.startswith("mid_block"):
hidden_size = unet.config.block_out_channels[-1]
elif name.startswith("up_blocks"):
block_id = int(name[len("up_blocks.")])
hidden_size = list(reversed(unet.config.block_out_channels))[block_id]
elif name.startswith("down_blocks"):
block_id = int(name[len("down_blocks.")])
hidden_size = unet.config.block_out_channels[block_id]
lora_attn_procs[name] = LoRAAttnAddedKVProcessor(
hidden_size=hidden_size,
cross_attention_dim=cross_attention_dim,
rank=args.rank,
)
unet.set_attn_processor(lora_attn_procs)
lora_layers = AttnProcsLayers(unet.attn_processors)
if args.allow_tf32:
torch.backends.cuda.matmul.allow_tf32 = True
if args.use_8bit_adam:
try:
import bitsandbytes as bnb
except ImportError:
raise ImportError(
"Please install bitsandbytes to use 8-bit Adam. You can do so by running `pip install bitsandbytes`"
)
optimizer_cls = bnb.optim.AdamW8bit
else:
optimizer_cls = torch.optim.AdamW
optimizer = optimizer_cls(
lora_layers.parameters(),
lr=args.learning_rate,
betas=(args.adam_beta1, args.adam_beta2),
weight_decay=args.adam_weight_decay,
eps=args.adam_epsilon,
)
# Get the datasets: you can either provide your own training and evaluation files (see below)
# or specify a Dataset from the hub (the dataset will be downloaded automatically from the datasets Hub).
# In distributed training, the load_dataset function guarantees that only one local process can concurrently
# download the dataset.
if args.dataset_name is not None:
# Downloading and loading a dataset from the hub.
dataset = load_dataset(
args.dataset_name,
args.dataset_config_name,
cache_dir=args.cache_dir,
)
else:
data_files = {}
if args.train_data_dir is not None:
data_files["train"] = os.path.join(args.train_data_dir, "**")
dataset = load_dataset(
"imagefolder",
data_files=data_files,
cache_dir=args.cache_dir,
)
# See more about loading custom images at
# https://huggingface.co/docs/datasets/v2.4.0/en/image_load#imagefolder
# Preprocessing the datasets.
# We need to tokenize inputs and targets.
column_names = dataset["train"].column_names
image_column = args.image_column
if image_column not in column_names:
raise ValueError(f"--image_column' value '{args.image_column}' needs to be one of: {', '.join(column_names)}")
def center_crop(image):
width, height = image.size
new_size = min(width, height)
left = (width - new_size) / 2
top = (height - new_size) / 2
right = (width + new_size) / 2
bottom = (height + new_size) / 2
return image.crop((left, top, right, bottom))
def train_transforms(img):
img = center_crop(img)
img = img.resize((args.resolution, args.resolution), resample=Image.BICUBIC, reducing_gap=1)
img = np.array(img).astype(np.float32) / 127.5 - 1
img = torch.from_numpy(np.transpose(img, [2, 0, 1]))
return img
def preprocess_train(examples):
images = [image.convert("RGB") for image in examples[image_column]]
examples["pixel_values"] = [train_transforms(image) for image in images]
examples["clip_pixel_values"] = image_processor(images, return_tensors="pt").pixel_values
return examples
with accelerator.main_process_first():
if args.max_train_samples is not None:
dataset["train"] = dataset["train"].shuffle(seed=args.seed).select(range(args.max_train_samples))
# Set the training transforms
train_dataset = dataset["train"].with_transform(preprocess_train)
def collate_fn(examples):
pixel_values = torch.stack([example["pixel_values"] for example in examples])
pixel_values = pixel_values.to(memory_format=torch.contiguous_format).float()
clip_pixel_values = torch.stack([example["clip_pixel_values"] for example in examples])
clip_pixel_values = clip_pixel_values.to(memory_format=torch.contiguous_format).float()
return {"pixel_values": pixel_values, "clip_pixel_values": clip_pixel_values}
train_dataloader = torch.utils.data.DataLoader(
train_dataset,
shuffle=True,
collate_fn=collate_fn,
batch_size=args.train_batch_size,
num_workers=args.dataloader_num_workers,
)
# Scheduler and math around the number of training steps.
overrode_max_train_steps = False
num_update_steps_per_epoch = math.ceil(len(train_dataloader) / args.gradient_accumulation_steps)
if args.max_train_steps is None:
args.max_train_steps = args.num_train_epochs * num_update_steps_per_epoch
overrode_max_train_steps = True
lr_scheduler = get_scheduler(
args.lr_scheduler,
optimizer=optimizer,
num_warmup_steps=args.lr_warmup_steps * args.gradient_accumulation_steps,
num_training_steps=args.max_train_steps * args.gradient_accumulation_steps,
)
# Prepare everything with our `accelerator`.
lora_layers, optimizer, train_dataloader, lr_scheduler = accelerator.prepare(
lora_layers, optimizer, train_dataloader, lr_scheduler
)
# We need to recalculate our total training steps as the size of the training dataloader may have changed.
num_update_steps_per_epoch = math.ceil(len(train_dataloader) / args.gradient_accumulation_steps)
if overrode_max_train_steps:
args.max_train_steps = args.num_train_epochs * num_update_steps_per_epoch
# Afterwards we recalculate our number of training epochs
args.num_train_epochs = math.ceil(args.max_train_steps / num_update_steps_per_epoch)
# We need to initialize the trackers we use, and also store our configuration.
# The trackers initializes automatically on the main process.
if accelerator.is_main_process:
accelerator.init_trackers("text2image-fine-tune", config=vars(args))
# Train!
total_batch_size = args.train_batch_size * accelerator.num_processes * args.gradient_accumulation_steps
logger.info("***** Running training *****")
logger.info(f" Num examples = {len(train_dataset)}")
logger.info(f" Num Epochs = {args.num_train_epochs}")
logger.info(f" Instantaneous batch size per device = {args.train_batch_size}")
logger.info(f" Total train batch size (w. parallel, distributed & accumulation) = {total_batch_size}")
logger.info(f" Gradient Accumulation steps = {args.gradient_accumulation_steps}")
logger.info(f" Total optimization steps = {args.max_train_steps}")
global_step = 0
first_epoch = 0
# Potentially load in the weights and states from a previous save
if args.resume_from_checkpoint:
if args.resume_from_checkpoint != "latest":
path = os.path.basename(args.resume_from_checkpoint)
else:
# Get the most recent checkpoint
dirs = os.listdir(args.output_dir)
dirs = [d for d in dirs if d.startswith("checkpoint")]
dirs = sorted(dirs, key=lambda x: int(x.split("-")[1]))
path = dirs[-1] if len(dirs) > 0 else None
if path is None:
accelerator.print(
f"Checkpoint '{args.resume_from_checkpoint}' does not exist. Starting a new training run."
)
args.resume_from_checkpoint = None
initial_global_step = 0
else:
accelerator.print(f"Resuming from checkpoint {path}")
accelerator.load_state(os.path.join(args.output_dir, path))
global_step = int(path.split("-")[1])
initial_global_step = global_step
first_epoch = global_step // num_update_steps_per_epoch
else:
initial_global_step = 0
progress_bar = tqdm(
range(0, args.max_train_steps),
initial=initial_global_step,
desc="Steps",
# Only show the progress bar once on each machine.
disable=not accelerator.is_local_main_process,
)
for epoch in range(first_epoch, args.num_train_epochs):
unet.train()
train_loss = 0.0
for step, batch in enumerate(train_dataloader):
with accelerator.accumulate(unet):
# Convert images to latent space
images = batch["pixel_values"].to(weight_dtype)
clip_images = batch["clip_pixel_values"].to(weight_dtype)
latents = vae.encode(images).latents
image_embeds = image_encoder(clip_images).image_embeds
# Sample noise that we'll add to the latents
noise = torch.randn_like(latents)
bsz = latents.shape[0]
# Sample a random timestep for each image
timesteps = torch.randint(0, noise_scheduler.config.num_train_timesteps, (bsz,), device=latents.device)
timesteps = timesteps.long()
noisy_latents = noise_scheduler.add_noise(latents, noise, timesteps)
target = noise
# Predict the noise residual and compute loss
added_cond_kwargs = {"image_embeds": image_embeds}
model_pred = unet(noisy_latents, timesteps, None, added_cond_kwargs=added_cond_kwargs).sample[:, :4]
if args.snr_gamma is None:
loss = F.mse_loss(model_pred.float(), target.float(), reduction="mean")
else:
# Compute loss-weights as per Section 3.4 of https://arxiv.org/abs/2303.09556.
# Since we predict the noise instead of x_0, the original formulation is slightly changed.
# This is discussed in Section 4.2 of the same paper.
snr = compute_snr(noise_scheduler, timesteps)
mse_loss_weights = torch.stack([snr, args.snr_gamma * torch.ones_like(timesteps)], dim=1).min(
dim=1
)[0]
if noise_scheduler.config.prediction_type == "epsilon":
mse_loss_weights = mse_loss_weights / snr
elif noise_scheduler.config.prediction_type == "v_prediction":
mse_loss_weights = mse_loss_weights / (snr + 1)
loss = F.mse_loss(model_pred.float(), target.float(), reduction="none")
loss = loss.mean(dim=list(range(1, len(loss.shape)))) * mse_loss_weights
loss = loss.mean()
# Gather the losses across all processes for logging (if we use distributed training).
avg_loss = accelerator.gather(loss.repeat(args.train_batch_size)).mean()
train_loss += avg_loss.item() / args.gradient_accumulation_steps
# Backpropagate
accelerator.backward(loss)
if accelerator.sync_gradients:
params_to_clip = lora_layers.parameters()
accelerator.clip_grad_norm_(params_to_clip, args.max_grad_norm)
optimizer.step()
lr_scheduler.step()
optimizer.zero_grad()
# Checks if the accelerator has performed an optimization step behind the scenes
if accelerator.sync_gradients:
progress_bar.update(1)
global_step += 1
accelerator.log({"train_loss": train_loss}, step=global_step)
train_loss = 0.0
if global_step % args.checkpointing_steps == 0:
if accelerator.is_main_process:
# _before_ saving state, check if this save would set us over the `checkpoints_total_limit`
if args.checkpoints_total_limit is not None:
checkpoints = os.listdir(args.output_dir)
checkpoints = [d for d in checkpoints if d.startswith("checkpoint")]
checkpoints = sorted(checkpoints, key=lambda x: int(x.split("-")[1]))
# before we save the new checkpoint, we need to have at _most_ `checkpoints_total_limit - 1` checkpoints
if len(checkpoints) >= args.checkpoints_total_limit:
num_to_remove = len(checkpoints) - args.checkpoints_total_limit + 1
removing_checkpoints = checkpoints[0:num_to_remove]
logger.info(
f"{len(checkpoints)} checkpoints already exist, removing {len(removing_checkpoints)} checkpoints"
)
logger.info(f"removing checkpoints: {', '.join(removing_checkpoints)}")
for removing_checkpoint in removing_checkpoints:
removing_checkpoint = os.path.join(args.output_dir, removing_checkpoint)
shutil.rmtree(removing_checkpoint)
save_path = os.path.join(args.output_dir, f"checkpoint-{global_step}")
accelerator.save_state(save_path)
logger.info(f"Saved state to {save_path}")
logs = {"step_loss": loss.detach().item(), "lr": lr_scheduler.get_last_lr()[0]}
progress_bar.set_postfix(**logs)
if global_step >= args.max_train_steps:
break
if accelerator.is_main_process:
if args.validation_prompt is not None and epoch % args.validation_epochs == 0:
logger.info(
f"Running validation... \n Generating {args.num_validation_images} images with prompt:"
f" {args.validation_prompt}."
)
# create pipeline
pipeline = AutoPipelineForText2Image.from_pretrained(
args.pretrained_decoder_model_name_or_path,
unet=accelerator.unwrap_model(unet),
torch_dtype=weight_dtype,
)
pipeline = pipeline.to(accelerator.device)
pipeline.set_progress_bar_config(disable=True)
# run inference
generator = torch.Generator(device=accelerator.device)
if args.seed is not None:
generator = generator.manual_seed(args.seed)
images = []
for _ in range(args.num_validation_images):
images.append(
pipeline(args.validation_prompt, num_inference_steps=30, generator=generator).images[0]
)
for tracker in accelerator.trackers:
if tracker.name == "tensorboard":
np_images = np.stack([np.asarray(img) for img in images])
tracker.writer.add_images("validation", np_images, epoch, dataformats="NHWC")
if tracker.name == "wandb":
tracker.log(
{
"validation": [
wandb.Image(image, caption=f"{i}: {args.validation_prompt}")
for i, image in enumerate(images)
]
}
)
del pipeline
torch.cuda.empty_cache()
# Save the lora layers
accelerator.wait_for_everyone()
if accelerator.is_main_process:
unet = unet.to(torch.float32)
unet.save_attn_procs(args.output_dir)
if args.push_to_hub:
save_model_card(
repo_id,
images=images,
base_model=args.pretrained_decoder_model_name_or_path,
dataset_name=args.dataset_name,
repo_folder=args.output_dir,
)
upload_folder(
repo_id=repo_id,
folder_path=args.output_dir,
commit_message="End of training",
ignore_patterns=["step_*", "epoch_*"],
)
# Final inference
# Load previous pipeline
pipeline = AutoPipelineForText2Image.from_pretrained(
args.pretrained_decoder_model_name_or_path, torch_dtype=weight_dtype
)
pipeline = pipeline.to(accelerator.device)
# load attention processors
pipeline.unet.load_attn_procs(args.output_dir)
# run inference
generator = torch.Generator(device=accelerator.device)
if args.seed is not None:
generator = generator.manual_seed(args.seed)
images = []
for _ in range(args.num_validation_images):
images.append(pipeline(args.validation_prompt, num_inference_steps=30, generator=generator).images[0])
if accelerator.is_main_process:
for tracker in accelerator.trackers:
if len(images) != 0:
if tracker.name == "tensorboard":
np_images = np.stack([np.asarray(img) for img in images])
tracker.writer.add_images("test", np_images, epoch, dataformats="NHWC")
if tracker.name == "wandb":
tracker.log(
{
"test": [
wandb.Image(image, caption=f"{i}: {args.validation_prompt}")
for i, image in enumerate(images)
]
}
)
accelerator.end_training()
if __name__ == "__main__":
main()
| diffusers/examples/kandinsky2_2/text_to_image/train_text_to_image_lora_decoder.py/0 | {
"file_path": "diffusers/examples/kandinsky2_2/text_to_image/train_text_to_image_lora_decoder.py",
"repo_id": "diffusers",
"token_count": 14754
} | 97 |
# Copyright 2023 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import math
from dataclasses import dataclass
from typing import Any, Dict, List, Optional, Tuple, Union
import torch
import torch.utils.checkpoint
from torch import nn
from torch.nn import functional as F
from torch.nn.modules.normalization import GroupNorm
from diffusers.configuration_utils import ConfigMixin, register_to_config
from diffusers.models.attention_processor import USE_PEFT_BACKEND, AttentionProcessor
from diffusers.models.autoencoders import AutoencoderKL
from diffusers.models.lora import LoRACompatibleConv
from diffusers.models.modeling_utils import ModelMixin
from diffusers.models.unets.unet_2d_blocks import (
CrossAttnDownBlock2D,
CrossAttnUpBlock2D,
DownBlock2D,
Downsample2D,
ResnetBlock2D,
Transformer2DModel,
UpBlock2D,
Upsample2D,
)
from diffusers.models.unets.unet_2d_condition import UNet2DConditionModel
from diffusers.utils import BaseOutput, logging
logger = logging.get_logger(__name__) # pylint: disable=invalid-name
@dataclass
class ControlNetXSOutput(BaseOutput):
"""
The output of [`ControlNetXSModel`].
Args:
sample (`torch.FloatTensor` of shape `(batch_size, num_channels, height, width)`):
The output of the `ControlNetXSModel`. Unlike `ControlNetOutput` this is NOT to be added to the base model
output, but is already the final output.
"""
sample: torch.FloatTensor = None
# copied from diffusers.models.controlnet.ControlNetConditioningEmbedding
class ControlNetConditioningEmbedding(nn.Module):
"""
Quoting from https://arxiv.org/abs/2302.05543: "Stable Diffusion uses a pre-processing method similar to VQ-GAN
[11] to convert the entire dataset of 512 × 512 images into smaller 64 × 64 “latent images” for stabilized
training. This requires ControlNets to convert image-based conditions to 64 × 64 feature space to match the
convolution size. We use a tiny network E(·) of four convolution layers with 4 × 4 kernels and 2 × 2 strides
(activated by ReLU, channels are 16, 32, 64, 128, initialized with Gaussian weights, trained jointly with the full
model) to encode image-space conditions ... into feature maps ..."
"""
def __init__(
self,
conditioning_embedding_channels: int,
conditioning_channels: int = 3,
block_out_channels: Tuple[int, ...] = (16, 32, 96, 256),
):
super().__init__()
self.conv_in = nn.Conv2d(conditioning_channels, block_out_channels[0], kernel_size=3, padding=1)
self.blocks = nn.ModuleList([])
for i in range(len(block_out_channels) - 1):
channel_in = block_out_channels[i]
channel_out = block_out_channels[i + 1]
self.blocks.append(nn.Conv2d(channel_in, channel_in, kernel_size=3, padding=1))
self.blocks.append(nn.Conv2d(channel_in, channel_out, kernel_size=3, padding=1, stride=2))
self.conv_out = zero_module(
nn.Conv2d(block_out_channels[-1], conditioning_embedding_channels, kernel_size=3, padding=1)
)
def forward(self, conditioning):
embedding = self.conv_in(conditioning)
embedding = F.silu(embedding)
for block in self.blocks:
embedding = block(embedding)
embedding = F.silu(embedding)
embedding = self.conv_out(embedding)
return embedding
class ControlNetXSModel(ModelMixin, ConfigMixin):
r"""
A ControlNet-XS model
This model inherits from [`ModelMixin`] and [`ConfigMixin`]. Check the superclass documentation for it's generic
methods implemented for all models (such as downloading or saving).
Most of parameters for this model are passed into the [`UNet2DConditionModel`] it creates. Check the documentation
of [`UNet2DConditionModel`] for them.
Parameters:
conditioning_channels (`int`, defaults to 3):
Number of channels of conditioning input (e.g. an image)
controlnet_conditioning_channel_order (`str`, defaults to `"rgb"`):
The channel order of conditional image. Will convert to `rgb` if it's `bgr`.
conditioning_embedding_out_channels (`tuple[int]`, defaults to `(16, 32, 96, 256)`):
The tuple of output channel for each block in the `controlnet_cond_embedding` layer.
time_embedding_input_dim (`int`, defaults to 320):
Dimension of input into time embedding. Needs to be same as in the base model.
time_embedding_dim (`int`, defaults to 1280):
Dimension of output from time embedding. Needs to be same as in the base model.
learn_embedding (`bool`, defaults to `False`):
Whether to use time embedding of the control model. If yes, the time embedding is a linear interpolation of
the time embeddings of the control and base model with interpolation parameter `time_embedding_mix**3`.
time_embedding_mix (`float`, defaults to 1.0):
Linear interpolation parameter used if `learn_embedding` is `True`. A value of 1.0 means only the
control model's time embedding will be used. A value of 0.0 means only the base model's time embedding will be used.
base_model_channel_sizes (`Dict[str, List[Tuple[int]]]`):
Channel sizes of each subblock of base model. Use `gather_subblock_sizes` on your base model to compute it.
"""
@classmethod
def init_original(cls, base_model: UNet2DConditionModel, is_sdxl=True):
"""
Create a ControlNetXS model with the same parameters as in the original paper (https://github.com/vislearn/ControlNet-XS).
Parameters:
base_model (`UNet2DConditionModel`):
Base UNet model. Needs to be either StableDiffusion or StableDiffusion-XL.
is_sdxl (`bool`, defaults to `True`):
Whether passed `base_model` is a StableDiffusion-XL model.
"""
def get_dim_attn_heads(base_model: UNet2DConditionModel, size_ratio: float, num_attn_heads: int):
"""
Currently, diffusers can only set the dimension of attention heads (see https://github.com/huggingface/diffusers/issues/2011#issuecomment-1547958131 for why).
The original ControlNet-XS model, however, define the number of attention heads.
That's why compute the dimensions needed to get the correct number of attention heads.
"""
block_out_channels = [int(size_ratio * c) for c in base_model.config.block_out_channels]
dim_attn_heads = [math.ceil(c / num_attn_heads) for c in block_out_channels]
return dim_attn_heads
if is_sdxl:
return ControlNetXSModel.from_unet(
base_model,
time_embedding_mix=0.95,
learn_embedding=True,
size_ratio=0.1,
conditioning_embedding_out_channels=(16, 32, 96, 256),
num_attention_heads=get_dim_attn_heads(base_model, 0.1, 64),
)
else:
return ControlNetXSModel.from_unet(
base_model,
time_embedding_mix=1.0,
learn_embedding=True,
size_ratio=0.0125,
conditioning_embedding_out_channels=(16, 32, 96, 256),
num_attention_heads=get_dim_attn_heads(base_model, 0.0125, 8),
)
@classmethod
def _gather_subblock_sizes(cls, unet: UNet2DConditionModel, base_or_control: str):
"""To create correctly sized connections between base and control model, we need to know
the input and output channels of each subblock.
Parameters:
unet (`UNet2DConditionModel`):
Unet of which the subblock channels sizes are to be gathered.
base_or_control (`str`):
Needs to be either "base" or "control". If "base", decoder is also considered.
"""
if base_or_control not in ["base", "control"]:
raise ValueError("`base_or_control` needs to be either `base` or `control`")
channel_sizes = {"down": [], "mid": [], "up": []}
# input convolution
channel_sizes["down"].append((unet.conv_in.in_channels, unet.conv_in.out_channels))
# encoder blocks
for module in unet.down_blocks:
if isinstance(module, (CrossAttnDownBlock2D, DownBlock2D)):
for r in module.resnets:
channel_sizes["down"].append((r.in_channels, r.out_channels))
if module.downsamplers:
channel_sizes["down"].append(
(module.downsamplers[0].channels, module.downsamplers[0].out_channels)
)
else:
raise ValueError(f"Encountered unknown module of type {type(module)} while creating ControlNet-XS.")
# middle block
channel_sizes["mid"].append((unet.mid_block.resnets[0].in_channels, unet.mid_block.resnets[0].out_channels))
# decoder blocks
if base_or_control == "base":
for module in unet.up_blocks:
if isinstance(module, (CrossAttnUpBlock2D, UpBlock2D)):
for r in module.resnets:
channel_sizes["up"].append((r.in_channels, r.out_channels))
else:
raise ValueError(
f"Encountered unknown module of type {type(module)} while creating ControlNet-XS."
)
return channel_sizes
@register_to_config
def __init__(
self,
conditioning_channels: int = 3,
conditioning_embedding_out_channels: Tuple[int] = (16, 32, 96, 256),
controlnet_conditioning_channel_order: str = "rgb",
time_embedding_input_dim: int = 320,
time_embedding_dim: int = 1280,
time_embedding_mix: float = 1.0,
learn_embedding: bool = False,
base_model_channel_sizes: Dict[str, List[Tuple[int]]] = {
"down": [
(4, 320),
(320, 320),
(320, 320),
(320, 320),
(320, 640),
(640, 640),
(640, 640),
(640, 1280),
(1280, 1280),
],
"mid": [(1280, 1280)],
"up": [
(2560, 1280),
(2560, 1280),
(1920, 1280),
(1920, 640),
(1280, 640),
(960, 640),
(960, 320),
(640, 320),
(640, 320),
],
},
sample_size: Optional[int] = None,
down_block_types: Tuple[str] = (
"CrossAttnDownBlock2D",
"CrossAttnDownBlock2D",
"CrossAttnDownBlock2D",
"DownBlock2D",
),
up_block_types: Tuple[str] = ("UpBlock2D", "CrossAttnUpBlock2D", "CrossAttnUpBlock2D", "CrossAttnUpBlock2D"),
block_out_channels: Tuple[int] = (320, 640, 1280, 1280),
norm_num_groups: Optional[int] = 32,
cross_attention_dim: Union[int, Tuple[int]] = 1280,
transformer_layers_per_block: Union[int, Tuple[int], Tuple[Tuple]] = 1,
num_attention_heads: Optional[Union[int, Tuple[int]]] = 8,
upcast_attention: bool = False,
):
super().__init__()
# 1 - Create control unet
self.control_model = UNet2DConditionModel(
sample_size=sample_size,
down_block_types=down_block_types,
up_block_types=up_block_types,
block_out_channels=block_out_channels,
norm_num_groups=norm_num_groups,
cross_attention_dim=cross_attention_dim,
transformer_layers_per_block=transformer_layers_per_block,
attention_head_dim=num_attention_heads,
use_linear_projection=True,
upcast_attention=upcast_attention,
time_embedding_dim=time_embedding_dim,
)
# 2 - Do model surgery on control model
# 2.1 - Allow to use the same time information as the base model
adjust_time_dims(self.control_model, time_embedding_input_dim, time_embedding_dim)
# 2.2 - Allow for information infusion from base model
# We concat the output of each base encoder subblocks to the input of the next control encoder subblock
# (We ignore the 1st element, as it represents the `conv_in`.)
extra_input_channels = [input_channels for input_channels, _ in base_model_channel_sizes["down"][1:]]
it_extra_input_channels = iter(extra_input_channels)
for b, block in enumerate(self.control_model.down_blocks):
for r in range(len(block.resnets)):
increase_block_input_in_encoder_resnet(
self.control_model, block_no=b, resnet_idx=r, by=next(it_extra_input_channels)
)
if block.downsamplers:
increase_block_input_in_encoder_downsampler(
self.control_model, block_no=b, by=next(it_extra_input_channels)
)
increase_block_input_in_mid_resnet(self.control_model, by=extra_input_channels[-1])
# 2.3 - Make group norms work with modified channel sizes
adjust_group_norms(self.control_model)
# 3 - Gather Channel Sizes
self.ch_inout_ctrl = ControlNetXSModel._gather_subblock_sizes(self.control_model, base_or_control="control")
self.ch_inout_base = base_model_channel_sizes
# 4 - Build connections between base and control model
self.down_zero_convs_out = nn.ModuleList([])
self.down_zero_convs_in = nn.ModuleList([])
self.middle_block_out = nn.ModuleList([])
self.middle_block_in = nn.ModuleList([])
self.up_zero_convs_out = nn.ModuleList([])
self.up_zero_convs_in = nn.ModuleList([])
for ch_io_base in self.ch_inout_base["down"]:
self.down_zero_convs_in.append(self._make_zero_conv(in_channels=ch_io_base[1], out_channels=ch_io_base[1]))
for i in range(len(self.ch_inout_ctrl["down"])):
self.down_zero_convs_out.append(
self._make_zero_conv(self.ch_inout_ctrl["down"][i][1], self.ch_inout_base["down"][i][1])
)
self.middle_block_out = self._make_zero_conv(
self.ch_inout_ctrl["mid"][-1][1], self.ch_inout_base["mid"][-1][1]
)
self.up_zero_convs_out.append(
self._make_zero_conv(self.ch_inout_ctrl["down"][-1][1], self.ch_inout_base["mid"][-1][1])
)
for i in range(1, len(self.ch_inout_ctrl["down"])):
self.up_zero_convs_out.append(
self._make_zero_conv(self.ch_inout_ctrl["down"][-(i + 1)][1], self.ch_inout_base["up"][i - 1][1])
)
# 5 - Create conditioning hint embedding
self.controlnet_cond_embedding = ControlNetConditioningEmbedding(
conditioning_embedding_channels=block_out_channels[0],
block_out_channels=conditioning_embedding_out_channels,
conditioning_channels=conditioning_channels,
)
# In the mininal implementation setting, we only need the control model up to the mid block
del self.control_model.up_blocks
del self.control_model.conv_norm_out
del self.control_model.conv_out
@classmethod
def from_unet(
cls,
unet: UNet2DConditionModel,
conditioning_channels: int = 3,
conditioning_embedding_out_channels: Tuple[int] = (16, 32, 96, 256),
controlnet_conditioning_channel_order: str = "rgb",
learn_embedding: bool = False,
time_embedding_mix: float = 1.0,
block_out_channels: Optional[Tuple[int]] = None,
size_ratio: Optional[float] = None,
num_attention_heads: Optional[Union[int, Tuple[int]]] = 8,
norm_num_groups: Optional[int] = None,
):
r"""
Instantiate a [`ControlNetXSModel`] from [`UNet2DConditionModel`].
Parameters:
unet (`UNet2DConditionModel`):
The UNet model we want to control. The dimensions of the ControlNetXSModel will be adapted to it.
conditioning_channels (`int`, defaults to 3):
Number of channels of conditioning input (e.g. an image)
conditioning_embedding_out_channels (`tuple[int]`, defaults to `(16, 32, 96, 256)`):
The tuple of output channel for each block in the `controlnet_cond_embedding` layer.
controlnet_conditioning_channel_order (`str`, defaults to `"rgb"`):
The channel order of conditional image. Will convert to `rgb` if it's `bgr`.
learn_embedding (`bool`, defaults to `False`):
Wether to use time embedding of the control model. If yes, the time embedding is a linear interpolation
of the time embeddings of the control and base model with interpolation parameter
`time_embedding_mix**3`.
time_embedding_mix (`float`, defaults to 1.0):
Linear interpolation parameter used if `learn_embedding` is `True`.
block_out_channels (`Tuple[int]`, *optional*):
Down blocks output channels in control model. Either this or `size_ratio` must be given.
size_ratio (float, *optional*):
When given, block_out_channels is set to a relative fraction of the base model's block_out_channels.
Either this or `block_out_channels` must be given.
num_attention_heads (`Union[int, Tuple[int]]`, *optional*):
The dimension of the attention heads. The naming seems a bit confusing and it is, see https://github.com/huggingface/diffusers/issues/2011#issuecomment-1547958131 for why.
norm_num_groups (int, *optional*, defaults to `None`):
The number of groups to use for the normalization of the control unet. If `None`,
`int(unet.config.norm_num_groups * size_ratio)` is taken.
"""
# Check input
fixed_size = block_out_channels is not None
relative_size = size_ratio is not None
if not (fixed_size ^ relative_size):
raise ValueError(
"Pass exactly one of `block_out_channels` (for absolute sizing) or `control_model_ratio` (for relative sizing)."
)
# Create model
if block_out_channels is None:
block_out_channels = [int(size_ratio * c) for c in unet.config.block_out_channels]
# Check that attention heads and group norms match channel sizes
# - attention heads
def attn_heads_match_channel_sizes(attn_heads, channel_sizes):
if isinstance(attn_heads, (tuple, list)):
return all(c % a == 0 for a, c in zip(attn_heads, channel_sizes))
else:
return all(c % attn_heads == 0 for c in channel_sizes)
num_attention_heads = num_attention_heads or unet.config.attention_head_dim
if not attn_heads_match_channel_sizes(num_attention_heads, block_out_channels):
raise ValueError(
f"The dimension of attention heads ({num_attention_heads}) must divide `block_out_channels` ({block_out_channels}). If you didn't set `num_attention_heads` the default settings don't match your model. Set `num_attention_heads` manually."
)
# - group norms
def group_norms_match_channel_sizes(num_groups, channel_sizes):
return all(c % num_groups == 0 for c in channel_sizes)
if norm_num_groups is None:
if group_norms_match_channel_sizes(unet.config.norm_num_groups, block_out_channels):
norm_num_groups = unet.config.norm_num_groups
else:
norm_num_groups = min(block_out_channels)
if group_norms_match_channel_sizes(norm_num_groups, block_out_channels):
print(
f"`norm_num_groups` was set to `min(block_out_channels)` (={norm_num_groups}) so it divides all block_out_channels` ({block_out_channels}). Set it explicitly to remove this information."
)
else:
raise ValueError(
f"`block_out_channels` ({block_out_channels}) don't match the base models `norm_num_groups` ({unet.config.norm_num_groups}). Setting `norm_num_groups` to `min(block_out_channels)` ({norm_num_groups}) didn't fix this. Pass `norm_num_groups` explicitly so it divides all block_out_channels."
)
def get_time_emb_input_dim(unet: UNet2DConditionModel):
return unet.time_embedding.linear_1.in_features
def get_time_emb_dim(unet: UNet2DConditionModel):
return unet.time_embedding.linear_2.out_features
# Clone params from base unet if
# (i) it's required to build SD or SDXL, and
# (ii) it's not used for the time embedding (as time embedding of control model is never used), and
# (iii) it's not set further below anyway
to_keep = [
"cross_attention_dim",
"down_block_types",
"sample_size",
"transformer_layers_per_block",
"up_block_types",
"upcast_attention",
]
kwargs = {k: v for k, v in dict(unet.config).items() if k in to_keep}
kwargs.update(block_out_channels=block_out_channels)
kwargs.update(num_attention_heads=num_attention_heads)
kwargs.update(norm_num_groups=norm_num_groups)
# Add controlnetxs-specific params
kwargs.update(
conditioning_channels=conditioning_channels,
controlnet_conditioning_channel_order=controlnet_conditioning_channel_order,
time_embedding_input_dim=get_time_emb_input_dim(unet),
time_embedding_dim=get_time_emb_dim(unet),
time_embedding_mix=time_embedding_mix,
learn_embedding=learn_embedding,
base_model_channel_sizes=ControlNetXSModel._gather_subblock_sizes(unet, base_or_control="base"),
conditioning_embedding_out_channels=conditioning_embedding_out_channels,
)
return cls(**kwargs)
@property
def attn_processors(self) -> Dict[str, AttentionProcessor]:
r"""
Returns:
`dict` of attention processors: A dictionary containing all attention processors used in the model with
indexed by its weight name.
"""
return self.control_model.attn_processors
def set_attn_processor(self, processor: Union[AttentionProcessor, Dict[str, AttentionProcessor]]):
r"""
Sets the attention processor to use to compute attention.
Parameters:
processor (`dict` of `AttentionProcessor` or only `AttentionProcessor`):
The instantiated processor class or a dictionary of processor classes that will be set as the processor
for **all** `Attention` layers.
If `processor` is a dict, the key needs to define the path to the corresponding cross attention
processor. This is strongly recommended when setting trainable attention processors.
"""
self.control_model.set_attn_processor(processor)
def set_default_attn_processor(self):
"""
Disables custom attention processors and sets the default attention implementation.
"""
self.control_model.set_default_attn_processor()
def set_attention_slice(self, slice_size):
r"""
Enable sliced attention computation.
When this option is enabled, the attention module splits the input tensor in slices to compute attention in
several steps. This is useful for saving some memory in exchange for a small decrease in speed.
Args:
slice_size (`str` or `int` or `list(int)`, *optional*, defaults to `"auto"`):
When `"auto"`, input to the attention heads is halved, so attention is computed in two steps. If
`"max"`, maximum amount of memory is saved by running only one slice at a time. If a number is
provided, uses as many slices as `attention_head_dim // slice_size`. In this case, `attention_head_dim`
must be a multiple of `slice_size`.
"""
self.control_model.set_attention_slice(slice_size)
def _set_gradient_checkpointing(self, module, value=False):
if isinstance(module, (UNet2DConditionModel)):
if value:
module.enable_gradient_checkpointing()
else:
module.disable_gradient_checkpointing()
def forward(
self,
base_model: UNet2DConditionModel,
sample: torch.FloatTensor,
timestep: Union[torch.Tensor, float, int],
encoder_hidden_states: torch.Tensor,
controlnet_cond: torch.Tensor,
conditioning_scale: float = 1.0,
class_labels: Optional[torch.Tensor] = None,
timestep_cond: Optional[torch.Tensor] = None,
attention_mask: Optional[torch.Tensor] = None,
cross_attention_kwargs: Optional[Dict[str, Any]] = None,
added_cond_kwargs: Optional[Dict[str, torch.Tensor]] = None,
return_dict: bool = True,
) -> Union[ControlNetXSOutput, Tuple]:
"""
The [`ControlNetModel`] forward method.
Args:
base_model (`UNet2DConditionModel`):
The base unet model we want to control.
sample (`torch.FloatTensor`):
The noisy input tensor.
timestep (`Union[torch.Tensor, float, int]`):
The number of timesteps to denoise an input.
encoder_hidden_states (`torch.Tensor`):
The encoder hidden states.
controlnet_cond (`torch.FloatTensor`):
The conditional input tensor of shape `(batch_size, sequence_length, hidden_size)`.
conditioning_scale (`float`, defaults to `1.0`):
How much the control model affects the base model outputs.
class_labels (`torch.Tensor`, *optional*, defaults to `None`):
Optional class labels for conditioning. Their embeddings will be summed with the timestep embeddings.
timestep_cond (`torch.Tensor`, *optional*, defaults to `None`):
Additional conditional embeddings for timestep. If provided, the embeddings will be summed with the
timestep_embedding passed through the `self.time_embedding` layer to obtain the final timestep
embeddings.
attention_mask (`torch.Tensor`, *optional*, defaults to `None`):
An attention mask of shape `(batch, key_tokens)` is applied to `encoder_hidden_states`. If `1` the mask
is kept, otherwise if `0` it is discarded. Mask will be converted into a bias, which adds large
negative values to the attention scores corresponding to "discard" tokens.
added_cond_kwargs (`dict`):
Additional conditions for the Stable Diffusion XL UNet.
cross_attention_kwargs (`dict[str]`, *optional*, defaults to `None`):
A kwargs dictionary that if specified is passed along to the `AttnProcessor`.
return_dict (`bool`, defaults to `True`):
Whether or not to return a [`~models.controlnet.ControlNetOutput`] instead of a plain tuple.
Returns:
[`~models.controlnetxs.ControlNetXSOutput`] **or** `tuple`:
If `return_dict` is `True`, a [`~models.controlnetxs.ControlNetXSOutput`] is returned, otherwise a
tuple is returned where the first element is the sample tensor.
"""
# check channel order
channel_order = self.config.controlnet_conditioning_channel_order
if channel_order == "rgb":
# in rgb order by default
...
elif channel_order == "bgr":
controlnet_cond = torch.flip(controlnet_cond, dims=[1])
else:
raise ValueError(f"unknown `controlnet_conditioning_channel_order`: {channel_order}")
# scale control strength
n_connections = len(self.down_zero_convs_out) + 1 + len(self.up_zero_convs_out)
scale_list = torch.full((n_connections,), conditioning_scale)
# prepare attention_mask
if attention_mask is not None:
attention_mask = (1 - attention_mask.to(sample.dtype)) * -10000.0
attention_mask = attention_mask.unsqueeze(1)
# 1. time
timesteps = timestep
if not torch.is_tensor(timesteps):
# TODO: this requires sync between CPU and GPU. So try to pass timesteps as tensors if you can
# This would be a good case for the `match` statement (Python 3.10+)
is_mps = sample.device.type == "mps"
if isinstance(timestep, float):
dtype = torch.float32 if is_mps else torch.float64
else:
dtype = torch.int32 if is_mps else torch.int64
timesteps = torch.tensor([timesteps], dtype=dtype, device=sample.device)
elif len(timesteps.shape) == 0:
timesteps = timesteps[None].to(sample.device)
# broadcast to batch dimension in a way that's compatible with ONNX/Core ML
timesteps = timesteps.expand(sample.shape[0])
t_emb = base_model.time_proj(timesteps)
# timesteps does not contain any weights and will always return f32 tensors
# but time_embedding might actually be running in fp16. so we need to cast here.
# there might be better ways to encapsulate this.
t_emb = t_emb.to(dtype=sample.dtype)
if self.config.learn_embedding:
ctrl_temb = self.control_model.time_embedding(t_emb, timestep_cond)
base_temb = base_model.time_embedding(t_emb, timestep_cond)
interpolation_param = self.config.time_embedding_mix**0.3
temb = ctrl_temb * interpolation_param + base_temb * (1 - interpolation_param)
else:
temb = base_model.time_embedding(t_emb)
# added time & text embeddings
aug_emb = None
if base_model.class_embedding is not None:
if class_labels is None:
raise ValueError("class_labels should be provided when num_class_embeds > 0")
if base_model.config.class_embed_type == "timestep":
class_labels = base_model.time_proj(class_labels)
class_emb = base_model.class_embedding(class_labels).to(dtype=self.dtype)
temb = temb + class_emb
if base_model.config.addition_embed_type is not None:
if base_model.config.addition_embed_type == "text":
aug_emb = base_model.add_embedding(encoder_hidden_states)
elif base_model.config.addition_embed_type == "text_image":
raise NotImplementedError()
elif base_model.config.addition_embed_type == "text_time":
# SDXL - style
if "text_embeds" not in added_cond_kwargs:
raise ValueError(
f"{self.__class__} has the config param `addition_embed_type` set to 'text_time' which requires the keyword argument `text_embeds` to be passed in `added_cond_kwargs`"
)
text_embeds = added_cond_kwargs.get("text_embeds")
if "time_ids" not in added_cond_kwargs:
raise ValueError(
f"{self.__class__} has the config param `addition_embed_type` set to 'text_time' which requires the keyword argument `time_ids` to be passed in `added_cond_kwargs`"
)
time_ids = added_cond_kwargs.get("time_ids")
time_embeds = base_model.add_time_proj(time_ids.flatten())
time_embeds = time_embeds.reshape((text_embeds.shape[0], -1))
add_embeds = torch.concat([text_embeds, time_embeds], dim=-1)
add_embeds = add_embeds.to(temb.dtype)
aug_emb = base_model.add_embedding(add_embeds)
elif base_model.config.addition_embed_type == "image":
raise NotImplementedError()
elif base_model.config.addition_embed_type == "image_hint":
raise NotImplementedError()
temb = temb + aug_emb if aug_emb is not None else temb
# text embeddings
cemb = encoder_hidden_states
# Preparation
guided_hint = self.controlnet_cond_embedding(controlnet_cond)
h_ctrl = h_base = sample
hs_base, hs_ctrl = [], []
it_down_convs_in, it_down_convs_out, it_dec_convs_in, it_up_convs_out = map(
iter, (self.down_zero_convs_in, self.down_zero_convs_out, self.up_zero_convs_in, self.up_zero_convs_out)
)
scales = iter(scale_list)
base_down_subblocks = to_sub_blocks(base_model.down_blocks)
ctrl_down_subblocks = to_sub_blocks(self.control_model.down_blocks)
base_mid_subblocks = to_sub_blocks([base_model.mid_block])
ctrl_mid_subblocks = to_sub_blocks([self.control_model.mid_block])
base_up_subblocks = to_sub_blocks(base_model.up_blocks)
# Cross Control
# 0 - conv in
h_base = base_model.conv_in(h_base)
h_ctrl = self.control_model.conv_in(h_ctrl)
if guided_hint is not None:
h_ctrl += guided_hint
h_base = h_base + next(it_down_convs_out)(h_ctrl) * next(scales) # D - add ctrl -> base
hs_base.append(h_base)
hs_ctrl.append(h_ctrl)
# 1 - down
for m_base, m_ctrl in zip(base_down_subblocks, ctrl_down_subblocks):
h_ctrl = torch.cat([h_ctrl, next(it_down_convs_in)(h_base)], dim=1) # A - concat base -> ctrl
h_base = m_base(h_base, temb, cemb, attention_mask, cross_attention_kwargs) # B - apply base subblock
h_ctrl = m_ctrl(h_ctrl, temb, cemb, attention_mask, cross_attention_kwargs) # C - apply ctrl subblock
h_base = h_base + next(it_down_convs_out)(h_ctrl) * next(scales) # D - add ctrl -> base
hs_base.append(h_base)
hs_ctrl.append(h_ctrl)
# 2 - mid
h_ctrl = torch.cat([h_ctrl, next(it_down_convs_in)(h_base)], dim=1) # A - concat base -> ctrl
for m_base, m_ctrl in zip(base_mid_subblocks, ctrl_mid_subblocks):
h_base = m_base(h_base, temb, cemb, attention_mask, cross_attention_kwargs) # B - apply base subblock
h_ctrl = m_ctrl(h_ctrl, temb, cemb, attention_mask, cross_attention_kwargs) # C - apply ctrl subblock
h_base = h_base + self.middle_block_out(h_ctrl) * next(scales) # D - add ctrl -> base
# 3 - up
for i, m_base in enumerate(base_up_subblocks):
h_base = h_base + next(it_up_convs_out)(hs_ctrl.pop()) * next(scales) # add info from ctrl encoder
h_base = torch.cat([h_base, hs_base.pop()], dim=1) # concat info from base encoder+ctrl encoder
h_base = m_base(h_base, temb, cemb, attention_mask, cross_attention_kwargs)
h_base = base_model.conv_norm_out(h_base)
h_base = base_model.conv_act(h_base)
h_base = base_model.conv_out(h_base)
if not return_dict:
return h_base
return ControlNetXSOutput(sample=h_base)
def _make_zero_conv(self, in_channels, out_channels=None):
# keep running track of channels sizes
self.in_channels = in_channels
self.out_channels = out_channels or in_channels
return zero_module(nn.Conv2d(in_channels, out_channels, 1, padding=0))
@torch.no_grad()
def _check_if_vae_compatible(self, vae: AutoencoderKL):
condition_downscale_factor = 2 ** (len(self.config.conditioning_embedding_out_channels) - 1)
vae_downscale_factor = 2 ** (len(vae.config.block_out_channels) - 1)
compatible = condition_downscale_factor == vae_downscale_factor
return compatible, condition_downscale_factor, vae_downscale_factor
class SubBlock(nn.ModuleList):
"""A SubBlock is the largest piece of either base or control model, that is executed independently of the other model respectively.
Before each subblock, information is concatted from base to control. And after each subblock, information is added from control to base.
"""
def __init__(self, ms, *args, **kwargs):
if not is_iterable(ms):
ms = [ms]
super().__init__(ms, *args, **kwargs)
def forward(
self,
x: torch.Tensor,
temb: torch.Tensor,
cemb: torch.Tensor,
attention_mask: Optional[torch.Tensor] = None,
cross_attention_kwargs: Optional[Dict[str, Any]] = None,
):
"""Iterate through children and pass correct information to each."""
for m in self:
if isinstance(m, ResnetBlock2D):
x = m(x, temb)
elif isinstance(m, Transformer2DModel):
x = m(x, cemb, attention_mask=attention_mask, cross_attention_kwargs=cross_attention_kwargs).sample
elif isinstance(m, Downsample2D):
x = m(x)
elif isinstance(m, Upsample2D):
x = m(x)
else:
raise ValueError(
f"Type of m is {type(m)} but should be `ResnetBlock2D`, `Transformer2DModel`, `Downsample2D` or `Upsample2D`"
)
return x
def adjust_time_dims(unet: UNet2DConditionModel, in_dim: int, out_dim: int):
unet.time_embedding.linear_1 = nn.Linear(in_dim, out_dim)
def increase_block_input_in_encoder_resnet(unet: UNet2DConditionModel, block_no, resnet_idx, by):
"""Increase channels sizes to allow for additional concatted information from base model"""
r = unet.down_blocks[block_no].resnets[resnet_idx]
old_norm1, old_conv1 = r.norm1, r.conv1
# norm
norm_args = "num_groups num_channels eps affine".split(" ")
for a in norm_args:
assert hasattr(old_norm1, a)
norm_kwargs = {a: getattr(old_norm1, a) for a in norm_args}
norm_kwargs["num_channels"] += by # surgery done here
# conv1
conv1_args = [
"in_channels",
"out_channels",
"kernel_size",
"stride",
"padding",
"dilation",
"groups",
"bias",
"padding_mode",
]
if not USE_PEFT_BACKEND:
conv1_args.append("lora_layer")
for a in conv1_args:
assert hasattr(old_conv1, a)
conv1_kwargs = {a: getattr(old_conv1, a) for a in conv1_args}
conv1_kwargs["bias"] = "bias" in conv1_kwargs # as param, bias is a boolean, but as attr, it's a tensor.
conv1_kwargs["in_channels"] += by # surgery done here
# conv_shortcut
# as we changed the input size of the block, the input and output sizes are likely different,
# therefore we need a conv_shortcut (simply adding won't work)
conv_shortcut_args_kwargs = {
"in_channels": conv1_kwargs["in_channels"],
"out_channels": conv1_kwargs["out_channels"],
# default arguments from resnet.__init__
"kernel_size": 1,
"stride": 1,
"padding": 0,
"bias": True,
}
# swap old with new modules
unet.down_blocks[block_no].resnets[resnet_idx].norm1 = GroupNorm(**norm_kwargs)
unet.down_blocks[block_no].resnets[resnet_idx].conv1 = (
nn.Conv2d(**conv1_kwargs) if USE_PEFT_BACKEND else LoRACompatibleConv(**conv1_kwargs)
)
unet.down_blocks[block_no].resnets[resnet_idx].conv_shortcut = (
nn.Conv2d(**conv_shortcut_args_kwargs) if USE_PEFT_BACKEND else LoRACompatibleConv(**conv_shortcut_args_kwargs)
)
unet.down_blocks[block_no].resnets[resnet_idx].in_channels += by # surgery done here
def increase_block_input_in_encoder_downsampler(unet: UNet2DConditionModel, block_no, by):
"""Increase channels sizes to allow for additional concatted information from base model"""
old_down = unet.down_blocks[block_no].downsamplers[0].conv
args = [
"in_channels",
"out_channels",
"kernel_size",
"stride",
"padding",
"dilation",
"groups",
"bias",
"padding_mode",
]
if not USE_PEFT_BACKEND:
args.append("lora_layer")
for a in args:
assert hasattr(old_down, a)
kwargs = {a: getattr(old_down, a) for a in args}
kwargs["bias"] = "bias" in kwargs # as param, bias is a boolean, but as attr, it's a tensor.
kwargs["in_channels"] += by # surgery done here
# swap old with new modules
unet.down_blocks[block_no].downsamplers[0].conv = (
nn.Conv2d(**kwargs) if USE_PEFT_BACKEND else LoRACompatibleConv(**kwargs)
)
unet.down_blocks[block_no].downsamplers[0].channels += by # surgery done here
def increase_block_input_in_mid_resnet(unet: UNet2DConditionModel, by):
"""Increase channels sizes to allow for additional concatted information from base model"""
m = unet.mid_block.resnets[0]
old_norm1, old_conv1 = m.norm1, m.conv1
# norm
norm_args = "num_groups num_channels eps affine".split(" ")
for a in norm_args:
assert hasattr(old_norm1, a)
norm_kwargs = {a: getattr(old_norm1, a) for a in norm_args}
norm_kwargs["num_channels"] += by # surgery done here
conv1_args = [
"in_channels",
"out_channels",
"kernel_size",
"stride",
"padding",
"dilation",
"groups",
"bias",
"padding_mode",
]
if not USE_PEFT_BACKEND:
conv1_args.append("lora_layer")
conv1_kwargs = {a: getattr(old_conv1, a) for a in conv1_args}
conv1_kwargs["bias"] = "bias" in conv1_kwargs # as param, bias is a boolean, but as attr, it's a tensor.
conv1_kwargs["in_channels"] += by # surgery done here
# conv_shortcut
# as we changed the input size of the block, the input and output sizes are likely different,
# therefore we need a conv_shortcut (simply adding won't work)
conv_shortcut_args_kwargs = {
"in_channels": conv1_kwargs["in_channels"],
"out_channels": conv1_kwargs["out_channels"],
# default arguments from resnet.__init__
"kernel_size": 1,
"stride": 1,
"padding": 0,
"bias": True,
}
# swap old with new modules
unet.mid_block.resnets[0].norm1 = GroupNorm(**norm_kwargs)
unet.mid_block.resnets[0].conv1 = (
nn.Conv2d(**conv1_kwargs) if USE_PEFT_BACKEND else LoRACompatibleConv(**conv1_kwargs)
)
unet.mid_block.resnets[0].conv_shortcut = (
nn.Conv2d(**conv_shortcut_args_kwargs) if USE_PEFT_BACKEND else LoRACompatibleConv(**conv_shortcut_args_kwargs)
)
unet.mid_block.resnets[0].in_channels += by # surgery done here
def adjust_group_norms(unet: UNet2DConditionModel, max_num_group: int = 32):
def find_denominator(number, start):
if start >= number:
return number
while start != 0:
residual = number % start
if residual == 0:
return start
start -= 1
for block in [*unet.down_blocks, unet.mid_block]:
# resnets
for r in block.resnets:
if r.norm1.num_groups < max_num_group:
r.norm1.num_groups = find_denominator(r.norm1.num_channels, start=max_num_group)
if r.norm2.num_groups < max_num_group:
r.norm2.num_groups = find_denominator(r.norm2.num_channels, start=max_num_group)
# transformers
if hasattr(block, "attentions"):
for a in block.attentions:
if a.norm.num_groups < max_num_group:
a.norm.num_groups = find_denominator(a.norm.num_channels, start=max_num_group)
def is_iterable(o):
if isinstance(o, str):
return False
try:
iter(o)
return True
except TypeError:
return False
def to_sub_blocks(blocks):
if not is_iterable(blocks):
blocks = [blocks]
sub_blocks = []
for b in blocks:
if hasattr(b, "resnets"):
if hasattr(b, "attentions") and b.attentions is not None:
for r, a in zip(b.resnets, b.attentions):
sub_blocks.append([r, a])
num_resnets = len(b.resnets)
num_attns = len(b.attentions)
if num_resnets > num_attns:
# we can have more resnets than attentions, so add each resnet as separate subblock
for i in range(num_attns, num_resnets):
sub_blocks.append([b.resnets[i]])
else:
for r in b.resnets:
sub_blocks.append([r])
# upsamplers are part of the same subblock
if hasattr(b, "upsamplers") and b.upsamplers is not None:
for u in b.upsamplers:
sub_blocks[-1].extend([u])
# downsamplers are own subblock
if hasattr(b, "downsamplers") and b.downsamplers is not None:
for d in b.downsamplers:
sub_blocks.append([d])
return list(map(SubBlock, sub_blocks))
def zero_module(module):
for p in module.parameters():
nn.init.zeros_(p)
return module
| diffusers/examples/research_projects/controlnetxs/controlnetxs.py/0 | {
"file_path": "diffusers/examples/research_projects/controlnetxs/controlnetxs.py",
"repo_id": "diffusers",
"token_count": 20495
} | 98 |
import argparse
import intel_extension_for_pytorch as ipex
import torch
from diffusers import DPMSolverMultistepScheduler, StableDiffusionPipeline
parser = argparse.ArgumentParser("Stable Diffusion script with intel optimization", add_help=False)
parser.add_argument("--dpm", action="store_true", help="Enable DPMSolver or not")
parser.add_argument("--steps", default=None, type=int, help="Num inference steps")
args = parser.parse_args()
device = "cpu"
prompt = "a lovely <dicoo> in red dress and hat, in the snowly and brightly night, with many brighly buildings"
model_id = "path-to-your-trained-model"
pipe = StableDiffusionPipeline.from_pretrained(model_id)
if args.dpm:
pipe.scheduler = DPMSolverMultistepScheduler.from_config(pipe.scheduler.config)
pipe = pipe.to(device)
# to channels last
pipe.unet = pipe.unet.to(memory_format=torch.channels_last)
pipe.vae = pipe.vae.to(memory_format=torch.channels_last)
pipe.text_encoder = pipe.text_encoder.to(memory_format=torch.channels_last)
if pipe.requires_safety_checker:
pipe.safety_checker = pipe.safety_checker.to(memory_format=torch.channels_last)
# optimize with ipex
sample = torch.randn(2, 4, 64, 64)
timestep = torch.rand(1) * 999
encoder_hidden_status = torch.randn(2, 77, 768)
input_example = (sample, timestep, encoder_hidden_status)
try:
pipe.unet = ipex.optimize(pipe.unet.eval(), dtype=torch.bfloat16, inplace=True, sample_input=input_example)
except Exception:
pipe.unet = ipex.optimize(pipe.unet.eval(), dtype=torch.bfloat16, inplace=True)
pipe.vae = ipex.optimize(pipe.vae.eval(), dtype=torch.bfloat16, inplace=True)
pipe.text_encoder = ipex.optimize(pipe.text_encoder.eval(), dtype=torch.bfloat16, inplace=True)
if pipe.requires_safety_checker:
pipe.safety_checker = ipex.optimize(pipe.safety_checker.eval(), dtype=torch.bfloat16, inplace=True)
# compute
seed = 666
generator = torch.Generator(device).manual_seed(seed)
generate_kwargs = {"generator": generator}
if args.steps is not None:
generate_kwargs["num_inference_steps"] = args.steps
with torch.cpu.amp.autocast(enabled=True, dtype=torch.bfloat16):
image = pipe(prompt, **generate_kwargs).images[0]
# save image
image.save("generated.png")
| diffusers/examples/research_projects/intel_opts/inference_bf16.py/0 | {
"file_path": "diffusers/examples/research_projects/intel_opts/inference_bf16.py",
"repo_id": "diffusers",
"token_count": 798
} | 99 |
import argparse
import copy
import itertools
import logging
import math
import os
import random
from pathlib import Path
import numpy as np
import torch
import torch.nn.functional as F
import torch.utils.checkpoint
from accelerate import Accelerator
from accelerate.logging import get_logger
from accelerate.utils import ProjectConfiguration, set_seed
from datasets import concatenate_datasets, load_dataset
from PIL import Image
from torch.utils.data import Dataset
from torchvision import transforms
from tqdm.auto import tqdm
from transformers import CLIPTextModel, CLIPTokenizer
from diffusers import (
AutoencoderKL,
DDPMScheduler,
StableDiffusionInpaintPipeline,
UNet2DConditionModel,
)
from diffusers.optimization import get_scheduler
from diffusers.utils import check_min_version, is_wandb_available
if is_wandb_available():
import wandb
# Will error if the minimal version of diffusers is not installed. Remove at your own risks.
check_min_version("0.13.0.dev0")
logger = get_logger(__name__)
def parse_args():
parser = argparse.ArgumentParser(description="Simple example of a training script.")
parser.add_argument(
"--pretrained_model_name_or_path",
type=str,
default=None,
required=True,
help="Path to pretrained model or model identifier from huggingface.co/models.",
)
parser.add_argument("--instance_data_dir", nargs="+", help="Instance data directories")
parser.add_argument(
"--output_dir",
type=str,
default="text-inversion-model",
help="The output directory where the model predictions and checkpoints will be written.",
)
parser.add_argument("--seed", type=int, default=None, help="A seed for reproducible training.")
parser.add_argument(
"--resolution",
type=int,
default=512,
help=(
"The resolution for input images, all the images in the train/validation dataset will be resized to this"
" resolution"
),
)
parser.add_argument(
"--train_text_encoder", default=False, action="store_true", help="Whether to train the text encoder"
)
parser.add_argument(
"--train_batch_size", type=int, default=4, help="Batch size (per device) for the training dataloader."
)
parser.add_argument(
"--sample_batch_size", type=int, default=4, help="Batch size (per device) for sampling images."
)
parser.add_argument(
"--max_train_steps",
type=int,
default=None,
help="Total number of training steps to perform. If provided, overrides num_train_epochs.",
)
parser.add_argument(
"--gradient_accumulation_steps",
type=int,
default=1,
help="Number of updates steps to accumulate before performing a backward/update pass.",
)
parser.add_argument(
"--learning_rate",
type=float,
default=5e-6,
help="Initial learning rate (after the potential warmup period) to use.",
)
parser.add_argument(
"--scale_lr",
action="store_true",
default=False,
help="Scale the learning rate by the number of GPUs, gradient accumulation steps, and batch size.",
)
parser.add_argument(
"--lr_scheduler",
type=str,
default="constant",
help=(
'The scheduler type to use. Choose between ["linear", "cosine", "cosine_with_restarts", "polynomial",'
' "constant", "constant_with_warmup"]'
),
)
parser.add_argument(
"--lr_warmup_steps", type=int, default=500, help="Number of steps for the warmup in the lr scheduler."
)
parser.add_argument("--adam_beta1", type=float, default=0.9, help="The beta1 parameter for the Adam optimizer.")
parser.add_argument("--adam_beta2", type=float, default=0.999, help="The beta2 parameter for the Adam optimizer.")
parser.add_argument("--adam_weight_decay", type=float, default=1e-2, help="Weight decay to use.")
parser.add_argument("--adam_epsilon", type=float, default=1e-08, help="Epsilon value for the Adam optimizer")
parser.add_argument("--max_grad_norm", default=1.0, type=float, help="Max gradient norm.")
parser.add_argument(
"--logging_dir",
type=str,
default="logs",
help=(
"[TensorBoard](https://www.tensorflow.org/tensorboard) log directory. Will default to"
" *output_dir/runs/**CURRENT_DATETIME_HOSTNAME***."
),
)
parser.add_argument(
"--mixed_precision",
type=str,
default="no",
choices=["no", "fp16", "bf16"],
help=(
"Whether to use mixed precision. Choose"
"between fp16 and bf16 (bfloat16). Bf16 requires PyTorch >= 1.10."
"and an Nvidia Ampere GPU."
),
)
parser.add_argument(
"--checkpointing_steps",
type=int,
default=1000,
help=(
"Save a checkpoint of the training state every X updates. These checkpoints can be used both as final"
" checkpoints in case they are better than the last checkpoint and are suitable for resuming training"
" using `--resume_from_checkpoint`."
),
)
parser.add_argument(
"--checkpointing_from",
type=int,
default=1000,
help=("Start to checkpoint from step"),
)
parser.add_argument(
"--validation_steps",
type=int,
default=50,
help=(
"Run validation every X steps. Validation consists of running the prompt"
" `args.validation_prompt` multiple times: `args.num_validation_images`"
" and logging the images."
),
)
parser.add_argument(
"--validation_from",
type=int,
default=0,
help=("Start to validate from step"),
)
parser.add_argument(
"--checkpoints_total_limit",
type=int,
default=None,
help=(
"Max number of checkpoints to store. Passed as `total_limit` to the `Accelerator` `ProjectConfiguration`."
" See Accelerator::save_state https://huggingface.co/docs/accelerate/package_reference/accelerator#accelerate.Accelerator.save_state"
" for more docs"
),
)
parser.add_argument(
"--resume_from_checkpoint",
type=str,
default=None,
help=(
"Whether training should be resumed from a previous checkpoint. Use a path saved by"
' `--checkpointing_steps`, or `"latest"` to automatically select the last available checkpoint.'
),
)
parser.add_argument(
"--validation_project_name",
type=str,
default=None,
help="The w&b name.",
)
parser.add_argument(
"--report_to_wandb", default=False, action="store_true", help="Whether to report to weights and biases"
)
args = parser.parse_args()
return args
def prepare_mask_and_masked_image(image, mask):
image = np.array(image.convert("RGB"))
image = image[None].transpose(0, 3, 1, 2)
image = torch.from_numpy(image).to(dtype=torch.float32) / 127.5 - 1.0
mask = np.array(mask.convert("L"))
mask = mask.astype(np.float32) / 255.0
mask = mask[None, None]
mask[mask < 0.5] = 0
mask[mask >= 0.5] = 1
mask = torch.from_numpy(mask)
masked_image = image * (mask < 0.5)
return mask, masked_image
class DreamBoothDataset(Dataset):
def __init__(
self,
tokenizer,
datasets_paths,
):
self.tokenizer = tokenizer
self.datasets_paths = (datasets_paths,)
self.datasets = [load_dataset(dataset_path) for dataset_path in self.datasets_paths[0]]
self.train_data = concatenate_datasets([dataset["train"] for dataset in self.datasets])
self.test_data = concatenate_datasets([dataset["test"] for dataset in self.datasets])
self.image_normalize = transforms.Compose(
[
transforms.ToTensor(),
transforms.Normalize([0.5], [0.5]),
]
)
def set_image(self, img, switch):
if img.mode not in ["RGB", "L"]:
img = img.convert("RGB")
if switch:
img = img.transpose(Image.FLIP_LEFT_RIGHT)
img = img.resize((512, 512), Image.BILINEAR)
return img
def __len__(self):
return len(self.train_data)
def __getitem__(self, index):
# Lettings
example = {}
img_idx = index % len(self.train_data)
switch = random.choice([True, False])
# Load image
image = self.set_image(self.train_data[img_idx]["image"], switch)
# Normalize image
image_norm = self.image_normalize(image)
# Tokenise prompt
tokenized_prompt = self.tokenizer(
self.train_data[img_idx]["prompt"],
padding="do_not_pad",
truncation=True,
max_length=self.tokenizer.model_max_length,
).input_ids
# Load masks for image
masks = [
self.set_image(self.train_data[img_idx][key], switch) for key in self.train_data[img_idx] if "mask" in key
]
# Build example
example["PIL_image"] = image
example["instance_image"] = image_norm
example["instance_prompt_id"] = tokenized_prompt
example["instance_masks"] = masks
return example
def weighted_mask(masks):
# Convert each mask to a NumPy array and ensure it's binary
mask_arrays = [np.array(mask) / 255 for mask in masks] # Normalizing to 0-1 range
# Generate random weights and apply them to each mask
weights = [random.random() for _ in masks]
weights = [weight / sum(weights) for weight in weights]
weighted_masks = [mask * weight for mask, weight in zip(mask_arrays, weights)]
# Sum the weighted masks
summed_mask = np.sum(weighted_masks, axis=0)
# Apply a threshold to create the final mask
threshold = 0.5 # This threshold can be adjusted
result_mask = summed_mask >= threshold
# Convert the result back to a PIL image
return Image.fromarray(result_mask.astype(np.uint8) * 255)
def collate_fn(examples, tokenizer):
input_ids = [example["instance_prompt_id"] for example in examples]
pixel_values = [example["instance_image"] for example in examples]
masks, masked_images = [], []
for example in examples:
# generate a random mask
mask = weighted_mask(example["instance_masks"])
# prepare mask and masked image
mask, masked_image = prepare_mask_and_masked_image(example["PIL_image"], mask)
masks.append(mask)
masked_images.append(masked_image)
pixel_values = torch.stack(pixel_values).to(memory_format=torch.contiguous_format).float()
masks = torch.stack(masks)
masked_images = torch.stack(masked_images)
input_ids = tokenizer.pad({"input_ids": input_ids}, padding=True, return_tensors="pt").input_ids
batch = {"input_ids": input_ids, "pixel_values": pixel_values, "masks": masks, "masked_images": masked_images}
return batch
def log_validation(pipeline, text_encoder, unet, val_pairs, accelerator):
# update pipeline (note: unet and vae are loaded again in float32)
pipeline.text_encoder = accelerator.unwrap_model(text_encoder)
pipeline.unet = accelerator.unwrap_model(unet)
with torch.autocast("cuda"):
val_results = [{"data_or_path": pipeline(**pair).images[0], "caption": pair["prompt"]} for pair in val_pairs]
torch.cuda.empty_cache()
wandb.log({"validation": [wandb.Image(**val_result) for val_result in val_results]})
def checkpoint(args, global_step, accelerator):
save_path = os.path.join(args.output_dir, f"checkpoint-{global_step}")
accelerator.save_state(save_path)
logger.info(f"Saved state to {save_path}")
def main():
args = parse_args()
project_config = ProjectConfiguration(
total_limit=args.checkpoints_total_limit,
project_dir=args.output_dir,
logging_dir=Path(args.output_dir, args.logging_dir),
)
accelerator = Accelerator(
gradient_accumulation_steps=args.gradient_accumulation_steps,
mixed_precision=args.mixed_precision,
project_config=project_config,
log_with="wandb" if args.report_to_wandb else None,
)
if args.report_to_wandb and not is_wandb_available():
raise ImportError("Make sure to install wandb if you want to use it for logging during training.")
if args.seed is not None:
set_seed(args.seed)
# Make one log on every process with the configuration for debugging.
logging.basicConfig(
format="%(asctime)s - %(levelname)s - %(name)s - %(message)s",
datefmt="%m/%d/%Y %H:%M:%S",
level=logging.INFO,
)
logger.info(accelerator.state, main_process_only=False)
# Load the tokenizer & models and create wrapper for stable diffusion
tokenizer = CLIPTokenizer.from_pretrained(args.pretrained_model_name_or_path, subfolder="tokenizer")
text_encoder = CLIPTextModel.from_pretrained(
args.pretrained_model_name_or_path, subfolder="text_encoder"
).requires_grad_(args.train_text_encoder)
vae = AutoencoderKL.from_pretrained(args.pretrained_model_name_or_path, subfolder="vae").requires_grad_(False)
unet = UNet2DConditionModel.from_pretrained(args.pretrained_model_name_or_path, subfolder="unet")
if args.scale_lr:
args.learning_rate = (
args.learning_rate * args.gradient_accumulation_steps * args.train_batch_size * accelerator.num_processes
)
optimizer = torch.optim.AdamW(
params=itertools.chain(unet.parameters(), text_encoder.parameters())
if args.train_text_encoder
else unet.parameters(),
lr=args.learning_rate,
betas=(args.adam_beta1, args.adam_beta2),
weight_decay=args.adam_weight_decay,
eps=args.adam_epsilon,
)
noise_scheduler = DDPMScheduler.from_pretrained(args.pretrained_model_name_or_path, subfolder="scheduler")
train_dataset = DreamBoothDataset(
tokenizer=tokenizer,
datasets_paths=args.instance_data_dir,
)
train_dataloader = torch.utils.data.DataLoader(
train_dataset,
batch_size=args.train_batch_size,
shuffle=True,
collate_fn=lambda examples: collate_fn(examples, tokenizer),
)
# Scheduler and math around the number of training steps.
num_update_steps_per_epoch = math.ceil(len(train_dataloader) / args.gradient_accumulation_steps)
lr_scheduler = get_scheduler(
args.lr_scheduler,
optimizer=optimizer,
num_warmup_steps=args.lr_warmup_steps * accelerator.num_processes,
num_training_steps=args.max_train_steps * accelerator.num_processes,
)
if args.train_text_encoder:
unet, text_encoder, optimizer, train_dataloader, lr_scheduler = accelerator.prepare(
unet, text_encoder, optimizer, train_dataloader, lr_scheduler
)
else:
unet, optimizer, train_dataloader, lr_scheduler = accelerator.prepare(
unet, optimizer, train_dataloader, lr_scheduler
)
accelerator.register_for_checkpointing(lr_scheduler)
if args.mixed_precision == "fp16":
weight_dtype = torch.float16
elif args.mixed_precision == "bf16":
weight_dtype = torch.bfloat16
else:
weight_dtype = torch.float32
# Move text_encode and vae to gpu.
# For mixed precision training we cast the text_encoder and vae weights to half-precision
# as these models are only used for inference, keeping weights in full precision is not required.
vae.to(accelerator.device, dtype=weight_dtype)
if not args.train_text_encoder:
text_encoder.to(accelerator.device, dtype=weight_dtype)
# We need to recalculate our total training steps as the size of the training dataloader may have changed.
num_update_steps_per_epoch = math.ceil(len(train_dataloader) / args.gradient_accumulation_steps)
# Afterwards we calculate our number of training epochs
num_train_epochs = math.ceil(args.max_train_steps / num_update_steps_per_epoch)
# We need to initialize the trackers we use, and also store our configuration.
# The trackers initializes automatically on the main process.
if accelerator.is_main_process:
tracker_config = vars(copy.deepcopy(args))
accelerator.init_trackers(args.validation_project_name, config=tracker_config)
# create validation pipeline (note: unet and vae are loaded again in float32)
val_pipeline = StableDiffusionInpaintPipeline.from_pretrained(
args.pretrained_model_name_or_path,
tokenizer=tokenizer,
text_encoder=text_encoder,
unet=unet,
vae=vae,
torch_dtype=weight_dtype,
safety_checker=None,
)
val_pipeline.set_progress_bar_config(disable=True)
# prepare validation dataset
val_pairs = [
{
"image": example["image"],
"mask_image": mask,
"prompt": example["prompt"],
}
for example in train_dataset.test_data
for mask in [example[key] for key in example if "mask" in key]
]
# create custom saving & loading hooks so that `accelerator.save_state(...)` serializes in a nice format
def save_model_hook(models, weights, output_dir):
if accelerator.is_main_process:
for model in models:
sub_dir = "unet" if isinstance(model, type(accelerator.unwrap_model(unet))) else "text_encoder"
model.save_pretrained(os.path.join(output_dir, sub_dir))
# make sure to pop weight so that corresponding model is not saved again
weights.pop()
accelerator.register_save_state_pre_hook(save_model_hook)
print()
# Train!
total_batch_size = args.train_batch_size * accelerator.num_processes * args.gradient_accumulation_steps
logger.info("***** Running training *****")
logger.info(f" Num batches each epoch = {len(train_dataloader)}")
logger.info(f" Num Epochs = {num_train_epochs}")
logger.info(f" Instantaneous batch size per device = {args.train_batch_size}")
logger.info(f" Total train batch size (w. parallel, distributed & accumulation) = {total_batch_size}")
logger.info(f" Gradient Accumulation steps = {args.gradient_accumulation_steps}")
logger.info(f" Total optimization steps = {args.max_train_steps}")
global_step = 0
first_epoch = 0
if args.resume_from_checkpoint:
if args.resume_from_checkpoint != "latest":
path = os.path.basename(args.resume_from_checkpoint)
else:
# Get the most recent checkpoint
dirs = os.listdir(args.output_dir)
dirs = [d for d in dirs if d.startswith("checkpoint")]
dirs = sorted(dirs, key=lambda x: int(x.split("-")[1]))
path = dirs[-1] if len(dirs) > 0 else None
if path is None:
accelerator.print(
f"Checkpoint '{args.resume_from_checkpoint}' does not exist. Starting a new training run."
)
args.resume_from_checkpoint = None
else:
accelerator.print(f"Resuming from checkpoint {path}")
accelerator.load_state(os.path.join(args.output_dir, path))
global_step = int(path.split("-")[1])
resume_global_step = global_step * args.gradient_accumulation_steps
first_epoch = global_step // num_update_steps_per_epoch
resume_step = resume_global_step % (num_update_steps_per_epoch * args.gradient_accumulation_steps)
# Only show the progress bar once on each machine.
progress_bar = tqdm(range(global_step, args.max_train_steps), disable=not accelerator.is_local_main_process)
progress_bar.set_description("Steps")
for epoch in range(first_epoch, num_train_epochs):
unet.train()
for step, batch in enumerate(train_dataloader):
# Skip steps until we reach the resumed step
if args.resume_from_checkpoint and epoch == first_epoch and step < resume_step:
if step % args.gradient_accumulation_steps == 0:
progress_bar.update(1)
continue
with accelerator.accumulate(unet):
# Convert images to latent space
latents = vae.encode(batch["pixel_values"].to(dtype=weight_dtype)).latent_dist.sample()
latents = latents * vae.config.scaling_factor
# Convert masked images to latent space
masked_latents = vae.encode(
batch["masked_images"].reshape(batch["pixel_values"].shape).to(dtype=weight_dtype)
).latent_dist.sample()
masked_latents = masked_latents * vae.config.scaling_factor
masks = batch["masks"]
# resize the mask to latents shape as we concatenate the mask to the latents
mask = torch.stack(
[
torch.nn.functional.interpolate(mask, size=(args.resolution // 8, args.resolution // 8))
for mask in masks
]
)
mask = mask.reshape(-1, 1, args.resolution // 8, args.resolution // 8)
# Sample noise that we'll add to the latents
noise = torch.randn_like(latents)
bsz = latents.shape[0]
# Sample a random timestep for each image
timesteps = torch.randint(0, noise_scheduler.config.num_train_timesteps, (bsz,), device=latents.device)
timesteps = timesteps.long()
# Add noise to the latents according to the noise magnitude at each timestep
# (this is the forward diffusion process)
noisy_latents = noise_scheduler.add_noise(latents, noise, timesteps)
# concatenate the noised latents with the mask and the masked latents
latent_model_input = torch.cat([noisy_latents, mask, masked_latents], dim=1)
# Get the text embedding for conditioning
encoder_hidden_states = text_encoder(batch["input_ids"])[0]
# Predict the noise residual
noise_pred = unet(latent_model_input, timesteps, encoder_hidden_states).sample
# Get the target for loss depending on the prediction type
if noise_scheduler.config.prediction_type == "epsilon":
target = noise
elif noise_scheduler.config.prediction_type == "v_prediction":
target = noise_scheduler.get_velocity(latents, noise, timesteps)
else:
raise ValueError(f"Unknown prediction type {noise_scheduler.config.prediction_type}")
loss = F.mse_loss(noise_pred.float(), target.float(), reduction="mean")
accelerator.backward(loss)
if accelerator.sync_gradients:
params_to_clip = (
itertools.chain(unet.parameters(), text_encoder.parameters())
if args.train_text_encoder
else unet.parameters()
)
accelerator.clip_grad_norm_(params_to_clip, args.max_grad_norm)
optimizer.step()
lr_scheduler.step()
optimizer.zero_grad()
# Checks if the accelerator has performed an optimization step behind the scenes
if accelerator.sync_gradients:
progress_bar.update(1)
global_step += 1
if accelerator.is_main_process:
if (
global_step % args.validation_steps == 0
and global_step >= args.validation_from
and args.report_to_wandb
):
log_validation(
val_pipeline,
text_encoder,
unet,
val_pairs,
accelerator,
)
if global_step % args.checkpointing_steps == 0 and global_step >= args.checkpointing_from:
checkpoint(
args,
global_step,
accelerator,
)
# Step logging
logs = {"loss": loss.detach().item(), "lr": lr_scheduler.get_last_lr()[0]}
progress_bar.set_postfix(**logs)
accelerator.log(logs, step=global_step)
if global_step >= args.max_train_steps:
break
accelerator.wait_for_everyone()
# Terminate training
accelerator.end_training()
if __name__ == "__main__":
main()
| diffusers/examples/research_projects/multi_subject_dreambooth_inpainting/train_multi_subject_dreambooth_inpainting.py/0 | {
"file_path": "diffusers/examples/research_projects/multi_subject_dreambooth_inpainting/train_multi_subject_dreambooth_inpainting.py",
"repo_id": "diffusers",
"token_count": 10829
} | 100 |
# coding=utf-8
# Copyright 2023 HuggingFace Inc.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import os
import shutil
import subprocess
import tempfile
import unittest
from typing import List
from accelerate.utils import write_basic_config
# These utils relate to ensuring the right error message is received when running scripts
class SubprocessCallException(Exception):
pass
def run_command(command: List[str], return_stdout=False):
"""
Runs `command` with `subprocess.check_output` and will potentially return the `stdout`. Will also properly capture
if an error occurred while running `command`
"""
try:
output = subprocess.check_output(command, stderr=subprocess.STDOUT)
if return_stdout:
if hasattr(output, "decode"):
output = output.decode("utf-8")
return output
except subprocess.CalledProcessError as e:
raise SubprocessCallException(
f"Command `{' '.join(command)}` failed with the following error:\n\n{e.output.decode()}"
) from e
class ExamplesTestsAccelerate(unittest.TestCase):
@classmethod
def setUpClass(cls):
super().setUpClass()
cls._tmpdir = tempfile.mkdtemp()
cls.configPath = os.path.join(cls._tmpdir, "default_config.yml")
write_basic_config(save_location=cls.configPath)
cls._launch_args = ["accelerate", "launch", "--config_file", cls.configPath]
@classmethod
def tearDownClass(cls):
super().tearDownClass()
shutil.rmtree(cls._tmpdir)
| diffusers/examples/test_examples_utils.py/0 | {
"file_path": "diffusers/examples/test_examples_utils.py",
"repo_id": "diffusers",
"token_count": 715
} | 101 |
[tool.ruff]
# Never enforce `E501` (line length violations).
ignore = ["C901", "E501", "E741", "F402", "F823"]
select = ["C", "E", "F", "I", "W"]
line-length = 119
# Ignore import violations in all `__init__.py` files.
[tool.ruff.per-file-ignores]
"__init__.py" = ["E402", "F401", "F403", "F811"]
"src/diffusers/utils/dummy_*.py" = ["F401"]
[tool.ruff.isort]
lines-after-imports = 2
known-first-party = ["diffusers"]
[tool.ruff.format]
# Like Black, use double quotes for strings.
quote-style = "double"
# Like Black, indent with spaces, rather than tabs.
indent-style = "space"
# Like Black, respect magic trailing commas.
skip-magic-trailing-comma = false
# Like Black, automatically detect the appropriate line ending.
line-ending = "auto"
| diffusers/pyproject.toml/0 | {
"file_path": "diffusers/pyproject.toml",
"repo_id": "diffusers",
"token_count": 270
} | 102 |
import argparse
import os
import torch
from torchvision.datasets.utils import download_url
from diffusers import AutoencoderKL, DDIMScheduler, DiTPipeline, Transformer2DModel
pretrained_models = {512: "DiT-XL-2-512x512.pt", 256: "DiT-XL-2-256x256.pt"}
def download_model(model_name):
"""
Downloads a pre-trained DiT model from the web.
"""
local_path = f"pretrained_models/{model_name}"
if not os.path.isfile(local_path):
os.makedirs("pretrained_models", exist_ok=True)
web_path = f"https://dl.fbaipublicfiles.com/DiT/models/{model_name}"
download_url(web_path, "pretrained_models")
model = torch.load(local_path, map_location=lambda storage, loc: storage)
return model
def main(args):
state_dict = download_model(pretrained_models[args.image_size])
state_dict["pos_embed.proj.weight"] = state_dict["x_embedder.proj.weight"]
state_dict["pos_embed.proj.bias"] = state_dict["x_embedder.proj.bias"]
state_dict.pop("x_embedder.proj.weight")
state_dict.pop("x_embedder.proj.bias")
for depth in range(28):
state_dict[f"transformer_blocks.{depth}.norm1.emb.timestep_embedder.linear_1.weight"] = state_dict[
"t_embedder.mlp.0.weight"
]
state_dict[f"transformer_blocks.{depth}.norm1.emb.timestep_embedder.linear_1.bias"] = state_dict[
"t_embedder.mlp.0.bias"
]
state_dict[f"transformer_blocks.{depth}.norm1.emb.timestep_embedder.linear_2.weight"] = state_dict[
"t_embedder.mlp.2.weight"
]
state_dict[f"transformer_blocks.{depth}.norm1.emb.timestep_embedder.linear_2.bias"] = state_dict[
"t_embedder.mlp.2.bias"
]
state_dict[f"transformer_blocks.{depth}.norm1.emb.class_embedder.embedding_table.weight"] = state_dict[
"y_embedder.embedding_table.weight"
]
state_dict[f"transformer_blocks.{depth}.norm1.linear.weight"] = state_dict[
f"blocks.{depth}.adaLN_modulation.1.weight"
]
state_dict[f"transformer_blocks.{depth}.norm1.linear.bias"] = state_dict[
f"blocks.{depth}.adaLN_modulation.1.bias"
]
q, k, v = torch.chunk(state_dict[f"blocks.{depth}.attn.qkv.weight"], 3, dim=0)
q_bias, k_bias, v_bias = torch.chunk(state_dict[f"blocks.{depth}.attn.qkv.bias"], 3, dim=0)
state_dict[f"transformer_blocks.{depth}.attn1.to_q.weight"] = q
state_dict[f"transformer_blocks.{depth}.attn1.to_q.bias"] = q_bias
state_dict[f"transformer_blocks.{depth}.attn1.to_k.weight"] = k
state_dict[f"transformer_blocks.{depth}.attn1.to_k.bias"] = k_bias
state_dict[f"transformer_blocks.{depth}.attn1.to_v.weight"] = v
state_dict[f"transformer_blocks.{depth}.attn1.to_v.bias"] = v_bias
state_dict[f"transformer_blocks.{depth}.attn1.to_out.0.weight"] = state_dict[
f"blocks.{depth}.attn.proj.weight"
]
state_dict[f"transformer_blocks.{depth}.attn1.to_out.0.bias"] = state_dict[f"blocks.{depth}.attn.proj.bias"]
state_dict[f"transformer_blocks.{depth}.ff.net.0.proj.weight"] = state_dict[f"blocks.{depth}.mlp.fc1.weight"]
state_dict[f"transformer_blocks.{depth}.ff.net.0.proj.bias"] = state_dict[f"blocks.{depth}.mlp.fc1.bias"]
state_dict[f"transformer_blocks.{depth}.ff.net.2.weight"] = state_dict[f"blocks.{depth}.mlp.fc2.weight"]
state_dict[f"transformer_blocks.{depth}.ff.net.2.bias"] = state_dict[f"blocks.{depth}.mlp.fc2.bias"]
state_dict.pop(f"blocks.{depth}.attn.qkv.weight")
state_dict.pop(f"blocks.{depth}.attn.qkv.bias")
state_dict.pop(f"blocks.{depth}.attn.proj.weight")
state_dict.pop(f"blocks.{depth}.attn.proj.bias")
state_dict.pop(f"blocks.{depth}.mlp.fc1.weight")
state_dict.pop(f"blocks.{depth}.mlp.fc1.bias")
state_dict.pop(f"blocks.{depth}.mlp.fc2.weight")
state_dict.pop(f"blocks.{depth}.mlp.fc2.bias")
state_dict.pop(f"blocks.{depth}.adaLN_modulation.1.weight")
state_dict.pop(f"blocks.{depth}.adaLN_modulation.1.bias")
state_dict.pop("t_embedder.mlp.0.weight")
state_dict.pop("t_embedder.mlp.0.bias")
state_dict.pop("t_embedder.mlp.2.weight")
state_dict.pop("t_embedder.mlp.2.bias")
state_dict.pop("y_embedder.embedding_table.weight")
state_dict["proj_out_1.weight"] = state_dict["final_layer.adaLN_modulation.1.weight"]
state_dict["proj_out_1.bias"] = state_dict["final_layer.adaLN_modulation.1.bias"]
state_dict["proj_out_2.weight"] = state_dict["final_layer.linear.weight"]
state_dict["proj_out_2.bias"] = state_dict["final_layer.linear.bias"]
state_dict.pop("final_layer.linear.weight")
state_dict.pop("final_layer.linear.bias")
state_dict.pop("final_layer.adaLN_modulation.1.weight")
state_dict.pop("final_layer.adaLN_modulation.1.bias")
# DiT XL/2
transformer = Transformer2DModel(
sample_size=args.image_size // 8,
num_layers=28,
attention_head_dim=72,
in_channels=4,
out_channels=8,
patch_size=2,
attention_bias=True,
num_attention_heads=16,
activation_fn="gelu-approximate",
num_embeds_ada_norm=1000,
norm_type="ada_norm_zero",
norm_elementwise_affine=False,
)
transformer.load_state_dict(state_dict, strict=True)
scheduler = DDIMScheduler(
num_train_timesteps=1000,
beta_schedule="linear",
prediction_type="epsilon",
clip_sample=False,
)
vae = AutoencoderKL.from_pretrained(args.vae_model)
pipeline = DiTPipeline(transformer=transformer, vae=vae, scheduler=scheduler)
if args.save:
pipeline.save_pretrained(args.checkpoint_path)
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument(
"--image_size",
default=256,
type=int,
required=False,
help="Image size of pretrained model, either 256 or 512.",
)
parser.add_argument(
"--vae_model",
default="stabilityai/sd-vae-ft-ema",
type=str,
required=False,
help="Path to pretrained VAE model, either stabilityai/sd-vae-ft-mse or stabilityai/sd-vae-ft-ema.",
)
parser.add_argument(
"--save", default=True, type=bool, required=False, help="Whether to save the converted pipeline or not."
)
parser.add_argument(
"--checkpoint_path", default=None, type=str, required=True, help="Path to the output pipeline."
)
args = parser.parse_args()
main(args)
| diffusers/scripts/convert_dit_to_diffusers.py/0 | {
"file_path": "diffusers/scripts/convert_dit_to_diffusers.py",
"repo_id": "diffusers",
"token_count": 3037
} | 103 |
# coding=utf-8
# Copyright 2023 The HuggingFace Inc. team.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
""" Conversion script for stable diffusion checkpoints which _only_ contain a controlnet. """
import argparse
from diffusers.pipelines.stable_diffusion.convert_from_ckpt import download_controlnet_from_original_ckpt
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument(
"--checkpoint_path", default=None, type=str, required=True, help="Path to the checkpoint to convert."
)
parser.add_argument(
"--original_config_file",
type=str,
required=True,
help="The YAML config file corresponding to the original architecture.",
)
parser.add_argument(
"--num_in_channels",
default=None,
type=int,
help="The number of input channels. If `None` number of input channels will be automatically inferred.",
)
parser.add_argument(
"--image_size",
default=512,
type=int,
help=(
"The image size that the model was trained on. Use 512 for Stable Diffusion v1.X and Stable Siffusion v2"
" Base. Use 768 for Stable Diffusion v2."
),
)
parser.add_argument(
"--extract_ema",
action="store_true",
help=(
"Only relevant for checkpoints that have both EMA and non-EMA weights. Whether to extract the EMA weights"
" or not. Defaults to `False`. Add `--extract_ema` to extract the EMA weights. EMA weights usually yield"
" higher quality images for inference. Non-EMA weights are usually better to continue fine-tuning."
),
)
parser.add_argument(
"--upcast_attention",
action="store_true",
help=(
"Whether the attention computation should always be upcasted. This is necessary when running stable"
" diffusion 2.1."
),
)
parser.add_argument(
"--from_safetensors",
action="store_true",
help="If `--checkpoint_path` is in `safetensors` format, load checkpoint with safetensors instead of PyTorch.",
)
parser.add_argument(
"--to_safetensors",
action="store_true",
help="Whether to store pipeline in safetensors format or not.",
)
parser.add_argument("--dump_path", default=None, type=str, required=True, help="Path to the output model.")
parser.add_argument("--device", type=str, help="Device to use (e.g. cpu, cuda:0, cuda:1, etc.)")
# small workaround to get argparser to parse a boolean input as either true _or_ false
def parse_bool(string):
if string == "True":
return True
elif string == "False":
return False
else:
raise ValueError(f"could not parse string as bool {string}")
parser.add_argument(
"--use_linear_projection", help="Override for use linear projection", required=False, type=parse_bool
)
parser.add_argument("--cross_attention_dim", help="Override for cross attention_dim", required=False, type=int)
args = parser.parse_args()
controlnet = download_controlnet_from_original_ckpt(
checkpoint_path=args.checkpoint_path,
original_config_file=args.original_config_file,
image_size=args.image_size,
extract_ema=args.extract_ema,
num_in_channels=args.num_in_channels,
upcast_attention=args.upcast_attention,
from_safetensors=args.from_safetensors,
device=args.device,
use_linear_projection=args.use_linear_projection,
cross_attention_dim=args.cross_attention_dim,
)
controlnet.save_pretrained(args.dump_path, safe_serialization=args.to_safetensors)
| diffusers/scripts/convert_original_controlnet_to_diffusers.py/0 | {
"file_path": "diffusers/scripts/convert_original_controlnet_to_diffusers.py",
"repo_id": "diffusers",
"token_count": 1609
} | 104 |
"""
This script ports models from VQ-diffusion (https://github.com/microsoft/VQ-Diffusion) to diffusers.
It currently only supports porting the ITHQ dataset.
ITHQ dataset:
```sh
# From the root directory of diffusers.
# Download the VQVAE checkpoint
$ wget https://facevcstandard.blob.core.windows.net/v-zhictang/Improved-VQ-Diffusion_model_release/ithq_vqvae.pth?sv=2020-10-02&st=2022-05-30T15%3A17%3A18Z&se=2030-05-31T15%3A17%3A00Z&sr=b&sp=r&sig=1jVavHFPpUjDs%2FTO1V3PTezaNbPp2Nx8MxiWI7y6fEY%3D -O ithq_vqvae.pth
# Download the VQVAE config
# NOTE that in VQ-diffusion the documented file is `configs/ithq.yaml` but the target class
# `image_synthesis.modeling.codecs.image_codec.ema_vqvae.PatchVQVAE`
# loads `OUTPUT/pretrained_model/taming_dvae/config.yaml`
$ wget https://raw.githubusercontent.com/microsoft/VQ-Diffusion/main/OUTPUT/pretrained_model/taming_dvae/config.yaml -O ithq_vqvae.yaml
# Download the main model checkpoint
$ wget https://facevcstandard.blob.core.windows.net/v-zhictang/Improved-VQ-Diffusion_model_release/ithq_learnable.pth?sv=2020-10-02&st=2022-05-30T10%3A22%3A06Z&se=2030-05-31T10%3A22%3A00Z&sr=b&sp=r&sig=GOE%2Bza02%2FPnGxYVOOPtwrTR4RA3%2F5NVgMxdW4kjaEZ8%3D -O ithq_learnable.pth
# Download the main model config
$ wget https://raw.githubusercontent.com/microsoft/VQ-Diffusion/main/configs/ithq.yaml -O ithq.yaml
# run the convert script
$ python ./scripts/convert_vq_diffusion_to_diffusers.py \
--checkpoint_path ./ithq_learnable.pth \
--original_config_file ./ithq.yaml \
--vqvae_checkpoint_path ./ithq_vqvae.pth \
--vqvae_original_config_file ./ithq_vqvae.yaml \
--dump_path <path to save pre-trained `VQDiffusionPipeline`>
```
"""
import argparse
import tempfile
import torch
import yaml
from accelerate import init_empty_weights, load_checkpoint_and_dispatch
from transformers import CLIPTextModel, CLIPTokenizer
from yaml.loader import FullLoader
from diffusers import Transformer2DModel, VQDiffusionPipeline, VQDiffusionScheduler, VQModel
from diffusers.pipelines.vq_diffusion.pipeline_vq_diffusion import LearnedClassifierFreeSamplingEmbeddings
# vqvae model
PORTED_VQVAES = ["image_synthesis.modeling.codecs.image_codec.patch_vqgan.PatchVQGAN"]
def vqvae_model_from_original_config(original_config):
assert (
original_config["target"] in PORTED_VQVAES
), f"{original_config['target']} has not yet been ported to diffusers."
original_config = original_config["params"]
original_encoder_config = original_config["encoder_config"]["params"]
original_decoder_config = original_config["decoder_config"]["params"]
in_channels = original_encoder_config["in_channels"]
out_channels = original_decoder_config["out_ch"]
down_block_types = get_down_block_types(original_encoder_config)
up_block_types = get_up_block_types(original_decoder_config)
assert original_encoder_config["ch"] == original_decoder_config["ch"]
assert original_encoder_config["ch_mult"] == original_decoder_config["ch_mult"]
block_out_channels = tuple(
[original_encoder_config["ch"] * a_ch_mult for a_ch_mult in original_encoder_config["ch_mult"]]
)
assert original_encoder_config["num_res_blocks"] == original_decoder_config["num_res_blocks"]
layers_per_block = original_encoder_config["num_res_blocks"]
assert original_encoder_config["z_channels"] == original_decoder_config["z_channels"]
latent_channels = original_encoder_config["z_channels"]
num_vq_embeddings = original_config["n_embed"]
# Hard coded value for ResnetBlock.GoupNorm(num_groups) in VQ-diffusion
norm_num_groups = 32
e_dim = original_config["embed_dim"]
model = VQModel(
in_channels=in_channels,
out_channels=out_channels,
down_block_types=down_block_types,
up_block_types=up_block_types,
block_out_channels=block_out_channels,
layers_per_block=layers_per_block,
latent_channels=latent_channels,
num_vq_embeddings=num_vq_embeddings,
norm_num_groups=norm_num_groups,
vq_embed_dim=e_dim,
)
return model
def get_down_block_types(original_encoder_config):
attn_resolutions = coerce_attn_resolutions(original_encoder_config["attn_resolutions"])
num_resolutions = len(original_encoder_config["ch_mult"])
resolution = coerce_resolution(original_encoder_config["resolution"])
curr_res = resolution
down_block_types = []
for _ in range(num_resolutions):
if curr_res in attn_resolutions:
down_block_type = "AttnDownEncoderBlock2D"
else:
down_block_type = "DownEncoderBlock2D"
down_block_types.append(down_block_type)
curr_res = [r // 2 for r in curr_res]
return down_block_types
def get_up_block_types(original_decoder_config):
attn_resolutions = coerce_attn_resolutions(original_decoder_config["attn_resolutions"])
num_resolutions = len(original_decoder_config["ch_mult"])
resolution = coerce_resolution(original_decoder_config["resolution"])
curr_res = [r // 2 ** (num_resolutions - 1) for r in resolution]
up_block_types = []
for _ in reversed(range(num_resolutions)):
if curr_res in attn_resolutions:
up_block_type = "AttnUpDecoderBlock2D"
else:
up_block_type = "UpDecoderBlock2D"
up_block_types.append(up_block_type)
curr_res = [r * 2 for r in curr_res]
return up_block_types
def coerce_attn_resolutions(attn_resolutions):
attn_resolutions = list(attn_resolutions)
attn_resolutions_ = []
for ar in attn_resolutions:
if isinstance(ar, (list, tuple)):
attn_resolutions_.append(list(ar))
else:
attn_resolutions_.append([ar, ar])
return attn_resolutions_
def coerce_resolution(resolution):
if isinstance(resolution, int):
resolution = [resolution, resolution] # H, W
elif isinstance(resolution, (tuple, list)):
resolution = list(resolution)
else:
raise ValueError("Unknown type of resolution:", resolution)
return resolution
# done vqvae model
# vqvae checkpoint
def vqvae_original_checkpoint_to_diffusers_checkpoint(model, checkpoint):
diffusers_checkpoint = {}
diffusers_checkpoint.update(vqvae_encoder_to_diffusers_checkpoint(model, checkpoint))
# quant_conv
diffusers_checkpoint.update(
{
"quant_conv.weight": checkpoint["quant_conv.weight"],
"quant_conv.bias": checkpoint["quant_conv.bias"],
}
)
# quantize
diffusers_checkpoint.update({"quantize.embedding.weight": checkpoint["quantize.embedding"]})
# post_quant_conv
diffusers_checkpoint.update(
{
"post_quant_conv.weight": checkpoint["post_quant_conv.weight"],
"post_quant_conv.bias": checkpoint["post_quant_conv.bias"],
}
)
# decoder
diffusers_checkpoint.update(vqvae_decoder_to_diffusers_checkpoint(model, checkpoint))
return diffusers_checkpoint
def vqvae_encoder_to_diffusers_checkpoint(model, checkpoint):
diffusers_checkpoint = {}
# conv_in
diffusers_checkpoint.update(
{
"encoder.conv_in.weight": checkpoint["encoder.conv_in.weight"],
"encoder.conv_in.bias": checkpoint["encoder.conv_in.bias"],
}
)
# down_blocks
for down_block_idx, down_block in enumerate(model.encoder.down_blocks):
diffusers_down_block_prefix = f"encoder.down_blocks.{down_block_idx}"
down_block_prefix = f"encoder.down.{down_block_idx}"
# resnets
for resnet_idx, resnet in enumerate(down_block.resnets):
diffusers_resnet_prefix = f"{diffusers_down_block_prefix}.resnets.{resnet_idx}"
resnet_prefix = f"{down_block_prefix}.block.{resnet_idx}"
diffusers_checkpoint.update(
vqvae_resnet_to_diffusers_checkpoint(
resnet, checkpoint, diffusers_resnet_prefix=diffusers_resnet_prefix, resnet_prefix=resnet_prefix
)
)
# downsample
# do not include the downsample when on the last down block
# There is no downsample on the last down block
if down_block_idx != len(model.encoder.down_blocks) - 1:
# There's a single downsample in the original checkpoint but a list of downsamples
# in the diffusers model.
diffusers_downsample_prefix = f"{diffusers_down_block_prefix}.downsamplers.0.conv"
downsample_prefix = f"{down_block_prefix}.downsample.conv"
diffusers_checkpoint.update(
{
f"{diffusers_downsample_prefix}.weight": checkpoint[f"{downsample_prefix}.weight"],
f"{diffusers_downsample_prefix}.bias": checkpoint[f"{downsample_prefix}.bias"],
}
)
# attentions
if hasattr(down_block, "attentions"):
for attention_idx, _ in enumerate(down_block.attentions):
diffusers_attention_prefix = f"{diffusers_down_block_prefix}.attentions.{attention_idx}"
attention_prefix = f"{down_block_prefix}.attn.{attention_idx}"
diffusers_checkpoint.update(
vqvae_attention_to_diffusers_checkpoint(
checkpoint,
diffusers_attention_prefix=diffusers_attention_prefix,
attention_prefix=attention_prefix,
)
)
# mid block
# mid block attentions
# There is a single hardcoded attention block in the middle of the VQ-diffusion encoder
diffusers_attention_prefix = "encoder.mid_block.attentions.0"
attention_prefix = "encoder.mid.attn_1"
diffusers_checkpoint.update(
vqvae_attention_to_diffusers_checkpoint(
checkpoint, diffusers_attention_prefix=diffusers_attention_prefix, attention_prefix=attention_prefix
)
)
# mid block resnets
for diffusers_resnet_idx, resnet in enumerate(model.encoder.mid_block.resnets):
diffusers_resnet_prefix = f"encoder.mid_block.resnets.{diffusers_resnet_idx}"
# the hardcoded prefixes to `block_` are 1 and 2
orig_resnet_idx = diffusers_resnet_idx + 1
# There are two hardcoded resnets in the middle of the VQ-diffusion encoder
resnet_prefix = f"encoder.mid.block_{orig_resnet_idx}"
diffusers_checkpoint.update(
vqvae_resnet_to_diffusers_checkpoint(
resnet, checkpoint, diffusers_resnet_prefix=diffusers_resnet_prefix, resnet_prefix=resnet_prefix
)
)
diffusers_checkpoint.update(
{
# conv_norm_out
"encoder.conv_norm_out.weight": checkpoint["encoder.norm_out.weight"],
"encoder.conv_norm_out.bias": checkpoint["encoder.norm_out.bias"],
# conv_out
"encoder.conv_out.weight": checkpoint["encoder.conv_out.weight"],
"encoder.conv_out.bias": checkpoint["encoder.conv_out.bias"],
}
)
return diffusers_checkpoint
def vqvae_decoder_to_diffusers_checkpoint(model, checkpoint):
diffusers_checkpoint = {}
# conv in
diffusers_checkpoint.update(
{
"decoder.conv_in.weight": checkpoint["decoder.conv_in.weight"],
"decoder.conv_in.bias": checkpoint["decoder.conv_in.bias"],
}
)
# up_blocks
for diffusers_up_block_idx, up_block in enumerate(model.decoder.up_blocks):
# up_blocks are stored in reverse order in the VQ-diffusion checkpoint
orig_up_block_idx = len(model.decoder.up_blocks) - 1 - diffusers_up_block_idx
diffusers_up_block_prefix = f"decoder.up_blocks.{diffusers_up_block_idx}"
up_block_prefix = f"decoder.up.{orig_up_block_idx}"
# resnets
for resnet_idx, resnet in enumerate(up_block.resnets):
diffusers_resnet_prefix = f"{diffusers_up_block_prefix}.resnets.{resnet_idx}"
resnet_prefix = f"{up_block_prefix}.block.{resnet_idx}"
diffusers_checkpoint.update(
vqvae_resnet_to_diffusers_checkpoint(
resnet, checkpoint, diffusers_resnet_prefix=diffusers_resnet_prefix, resnet_prefix=resnet_prefix
)
)
# upsample
# there is no up sample on the last up block
if diffusers_up_block_idx != len(model.decoder.up_blocks) - 1:
# There's a single upsample in the VQ-diffusion checkpoint but a list of downsamples
# in the diffusers model.
diffusers_downsample_prefix = f"{diffusers_up_block_prefix}.upsamplers.0.conv"
downsample_prefix = f"{up_block_prefix}.upsample.conv"
diffusers_checkpoint.update(
{
f"{diffusers_downsample_prefix}.weight": checkpoint[f"{downsample_prefix}.weight"],
f"{diffusers_downsample_prefix}.bias": checkpoint[f"{downsample_prefix}.bias"],
}
)
# attentions
if hasattr(up_block, "attentions"):
for attention_idx, _ in enumerate(up_block.attentions):
diffusers_attention_prefix = f"{diffusers_up_block_prefix}.attentions.{attention_idx}"
attention_prefix = f"{up_block_prefix}.attn.{attention_idx}"
diffusers_checkpoint.update(
vqvae_attention_to_diffusers_checkpoint(
checkpoint,
diffusers_attention_prefix=diffusers_attention_prefix,
attention_prefix=attention_prefix,
)
)
# mid block
# mid block attentions
# There is a single hardcoded attention block in the middle of the VQ-diffusion decoder
diffusers_attention_prefix = "decoder.mid_block.attentions.0"
attention_prefix = "decoder.mid.attn_1"
diffusers_checkpoint.update(
vqvae_attention_to_diffusers_checkpoint(
checkpoint, diffusers_attention_prefix=diffusers_attention_prefix, attention_prefix=attention_prefix
)
)
# mid block resnets
for diffusers_resnet_idx, resnet in enumerate(model.encoder.mid_block.resnets):
diffusers_resnet_prefix = f"decoder.mid_block.resnets.{diffusers_resnet_idx}"
# the hardcoded prefixes to `block_` are 1 and 2
orig_resnet_idx = diffusers_resnet_idx + 1
# There are two hardcoded resnets in the middle of the VQ-diffusion decoder
resnet_prefix = f"decoder.mid.block_{orig_resnet_idx}"
diffusers_checkpoint.update(
vqvae_resnet_to_diffusers_checkpoint(
resnet, checkpoint, diffusers_resnet_prefix=diffusers_resnet_prefix, resnet_prefix=resnet_prefix
)
)
diffusers_checkpoint.update(
{
# conv_norm_out
"decoder.conv_norm_out.weight": checkpoint["decoder.norm_out.weight"],
"decoder.conv_norm_out.bias": checkpoint["decoder.norm_out.bias"],
# conv_out
"decoder.conv_out.weight": checkpoint["decoder.conv_out.weight"],
"decoder.conv_out.bias": checkpoint["decoder.conv_out.bias"],
}
)
return diffusers_checkpoint
def vqvae_resnet_to_diffusers_checkpoint(resnet, checkpoint, *, diffusers_resnet_prefix, resnet_prefix):
rv = {
# norm1
f"{diffusers_resnet_prefix}.norm1.weight": checkpoint[f"{resnet_prefix}.norm1.weight"],
f"{diffusers_resnet_prefix}.norm1.bias": checkpoint[f"{resnet_prefix}.norm1.bias"],
# conv1
f"{diffusers_resnet_prefix}.conv1.weight": checkpoint[f"{resnet_prefix}.conv1.weight"],
f"{diffusers_resnet_prefix}.conv1.bias": checkpoint[f"{resnet_prefix}.conv1.bias"],
# norm2
f"{diffusers_resnet_prefix}.norm2.weight": checkpoint[f"{resnet_prefix}.norm2.weight"],
f"{diffusers_resnet_prefix}.norm2.bias": checkpoint[f"{resnet_prefix}.norm2.bias"],
# conv2
f"{diffusers_resnet_prefix}.conv2.weight": checkpoint[f"{resnet_prefix}.conv2.weight"],
f"{diffusers_resnet_prefix}.conv2.bias": checkpoint[f"{resnet_prefix}.conv2.bias"],
}
if resnet.conv_shortcut is not None:
rv.update(
{
f"{diffusers_resnet_prefix}.conv_shortcut.weight": checkpoint[f"{resnet_prefix}.nin_shortcut.weight"],
f"{diffusers_resnet_prefix}.conv_shortcut.bias": checkpoint[f"{resnet_prefix}.nin_shortcut.bias"],
}
)
return rv
def vqvae_attention_to_diffusers_checkpoint(checkpoint, *, diffusers_attention_prefix, attention_prefix):
return {
# group_norm
f"{diffusers_attention_prefix}.group_norm.weight": checkpoint[f"{attention_prefix}.norm.weight"],
f"{diffusers_attention_prefix}.group_norm.bias": checkpoint[f"{attention_prefix}.norm.bias"],
# query
f"{diffusers_attention_prefix}.query.weight": checkpoint[f"{attention_prefix}.q.weight"][:, :, 0, 0],
f"{diffusers_attention_prefix}.query.bias": checkpoint[f"{attention_prefix}.q.bias"],
# key
f"{diffusers_attention_prefix}.key.weight": checkpoint[f"{attention_prefix}.k.weight"][:, :, 0, 0],
f"{diffusers_attention_prefix}.key.bias": checkpoint[f"{attention_prefix}.k.bias"],
# value
f"{diffusers_attention_prefix}.value.weight": checkpoint[f"{attention_prefix}.v.weight"][:, :, 0, 0],
f"{diffusers_attention_prefix}.value.bias": checkpoint[f"{attention_prefix}.v.bias"],
# proj_attn
f"{diffusers_attention_prefix}.proj_attn.weight": checkpoint[f"{attention_prefix}.proj_out.weight"][
:, :, 0, 0
],
f"{diffusers_attention_prefix}.proj_attn.bias": checkpoint[f"{attention_prefix}.proj_out.bias"],
}
# done vqvae checkpoint
# transformer model
PORTED_DIFFUSIONS = ["image_synthesis.modeling.transformers.diffusion_transformer.DiffusionTransformer"]
PORTED_TRANSFORMERS = ["image_synthesis.modeling.transformers.transformer_utils.Text2ImageTransformer"]
PORTED_CONTENT_EMBEDDINGS = ["image_synthesis.modeling.embeddings.dalle_mask_image_embedding.DalleMaskImageEmbedding"]
def transformer_model_from_original_config(
original_diffusion_config, original_transformer_config, original_content_embedding_config
):
assert (
original_diffusion_config["target"] in PORTED_DIFFUSIONS
), f"{original_diffusion_config['target']} has not yet been ported to diffusers."
assert (
original_transformer_config["target"] in PORTED_TRANSFORMERS
), f"{original_transformer_config['target']} has not yet been ported to diffusers."
assert (
original_content_embedding_config["target"] in PORTED_CONTENT_EMBEDDINGS
), f"{original_content_embedding_config['target']} has not yet been ported to diffusers."
original_diffusion_config = original_diffusion_config["params"]
original_transformer_config = original_transformer_config["params"]
original_content_embedding_config = original_content_embedding_config["params"]
inner_dim = original_transformer_config["n_embd"]
n_heads = original_transformer_config["n_head"]
# VQ-Diffusion gives dimension of the multi-headed attention layers as the
# number of attention heads times the sequence length (the dimension) of a
# single head. We want to specify our attention blocks with those values
# specified separately
assert inner_dim % n_heads == 0
d_head = inner_dim // n_heads
depth = original_transformer_config["n_layer"]
context_dim = original_transformer_config["condition_dim"]
num_embed = original_content_embedding_config["num_embed"]
# the number of embeddings in the transformer includes the mask embedding.
# the content embedding (the vqvae) does not include the mask embedding.
num_embed = num_embed + 1
height = original_transformer_config["content_spatial_size"][0]
width = original_transformer_config["content_spatial_size"][1]
assert width == height, "width has to be equal to height"
dropout = original_transformer_config["resid_pdrop"]
num_embeds_ada_norm = original_diffusion_config["diffusion_step"]
model_kwargs = {
"attention_bias": True,
"cross_attention_dim": context_dim,
"attention_head_dim": d_head,
"num_layers": depth,
"dropout": dropout,
"num_attention_heads": n_heads,
"num_vector_embeds": num_embed,
"num_embeds_ada_norm": num_embeds_ada_norm,
"norm_num_groups": 32,
"sample_size": width,
"activation_fn": "geglu-approximate",
}
model = Transformer2DModel(**model_kwargs)
return model
# done transformer model
# transformer checkpoint
def transformer_original_checkpoint_to_diffusers_checkpoint(model, checkpoint):
diffusers_checkpoint = {}
transformer_prefix = "transformer.transformer"
diffusers_latent_image_embedding_prefix = "latent_image_embedding"
latent_image_embedding_prefix = f"{transformer_prefix}.content_emb"
# DalleMaskImageEmbedding
diffusers_checkpoint.update(
{
f"{diffusers_latent_image_embedding_prefix}.emb.weight": checkpoint[
f"{latent_image_embedding_prefix}.emb.weight"
],
f"{diffusers_latent_image_embedding_prefix}.height_emb.weight": checkpoint[
f"{latent_image_embedding_prefix}.height_emb.weight"
],
f"{diffusers_latent_image_embedding_prefix}.width_emb.weight": checkpoint[
f"{latent_image_embedding_prefix}.width_emb.weight"
],
}
)
# transformer blocks
for transformer_block_idx, transformer_block in enumerate(model.transformer_blocks):
diffusers_transformer_block_prefix = f"transformer_blocks.{transformer_block_idx}"
transformer_block_prefix = f"{transformer_prefix}.blocks.{transformer_block_idx}"
# ada norm block
diffusers_ada_norm_prefix = f"{diffusers_transformer_block_prefix}.norm1"
ada_norm_prefix = f"{transformer_block_prefix}.ln1"
diffusers_checkpoint.update(
transformer_ada_norm_to_diffusers_checkpoint(
checkpoint, diffusers_ada_norm_prefix=diffusers_ada_norm_prefix, ada_norm_prefix=ada_norm_prefix
)
)
# attention block
diffusers_attention_prefix = f"{diffusers_transformer_block_prefix}.attn1"
attention_prefix = f"{transformer_block_prefix}.attn1"
diffusers_checkpoint.update(
transformer_attention_to_diffusers_checkpoint(
checkpoint, diffusers_attention_prefix=diffusers_attention_prefix, attention_prefix=attention_prefix
)
)
# ada norm block
diffusers_ada_norm_prefix = f"{diffusers_transformer_block_prefix}.norm2"
ada_norm_prefix = f"{transformer_block_prefix}.ln1_1"
diffusers_checkpoint.update(
transformer_ada_norm_to_diffusers_checkpoint(
checkpoint, diffusers_ada_norm_prefix=diffusers_ada_norm_prefix, ada_norm_prefix=ada_norm_prefix
)
)
# attention block
diffusers_attention_prefix = f"{diffusers_transformer_block_prefix}.attn2"
attention_prefix = f"{transformer_block_prefix}.attn2"
diffusers_checkpoint.update(
transformer_attention_to_diffusers_checkpoint(
checkpoint, diffusers_attention_prefix=diffusers_attention_prefix, attention_prefix=attention_prefix
)
)
# norm block
diffusers_norm_block_prefix = f"{diffusers_transformer_block_prefix}.norm3"
norm_block_prefix = f"{transformer_block_prefix}.ln2"
diffusers_checkpoint.update(
{
f"{diffusers_norm_block_prefix}.weight": checkpoint[f"{norm_block_prefix}.weight"],
f"{diffusers_norm_block_prefix}.bias": checkpoint[f"{norm_block_prefix}.bias"],
}
)
# feedforward block
diffusers_feedforward_prefix = f"{diffusers_transformer_block_prefix}.ff"
feedforward_prefix = f"{transformer_block_prefix}.mlp"
diffusers_checkpoint.update(
transformer_feedforward_to_diffusers_checkpoint(
checkpoint,
diffusers_feedforward_prefix=diffusers_feedforward_prefix,
feedforward_prefix=feedforward_prefix,
)
)
# to logits
diffusers_norm_out_prefix = "norm_out"
norm_out_prefix = f"{transformer_prefix}.to_logits.0"
diffusers_checkpoint.update(
{
f"{diffusers_norm_out_prefix}.weight": checkpoint[f"{norm_out_prefix}.weight"],
f"{diffusers_norm_out_prefix}.bias": checkpoint[f"{norm_out_prefix}.bias"],
}
)
diffusers_out_prefix = "out"
out_prefix = f"{transformer_prefix}.to_logits.1"
diffusers_checkpoint.update(
{
f"{diffusers_out_prefix}.weight": checkpoint[f"{out_prefix}.weight"],
f"{diffusers_out_prefix}.bias": checkpoint[f"{out_prefix}.bias"],
}
)
return diffusers_checkpoint
def transformer_ada_norm_to_diffusers_checkpoint(checkpoint, *, diffusers_ada_norm_prefix, ada_norm_prefix):
return {
f"{diffusers_ada_norm_prefix}.emb.weight": checkpoint[f"{ada_norm_prefix}.emb.weight"],
f"{diffusers_ada_norm_prefix}.linear.weight": checkpoint[f"{ada_norm_prefix}.linear.weight"],
f"{diffusers_ada_norm_prefix}.linear.bias": checkpoint[f"{ada_norm_prefix}.linear.bias"],
}
def transformer_attention_to_diffusers_checkpoint(checkpoint, *, diffusers_attention_prefix, attention_prefix):
return {
# key
f"{diffusers_attention_prefix}.to_k.weight": checkpoint[f"{attention_prefix}.key.weight"],
f"{diffusers_attention_prefix}.to_k.bias": checkpoint[f"{attention_prefix}.key.bias"],
# query
f"{diffusers_attention_prefix}.to_q.weight": checkpoint[f"{attention_prefix}.query.weight"],
f"{diffusers_attention_prefix}.to_q.bias": checkpoint[f"{attention_prefix}.query.bias"],
# value
f"{diffusers_attention_prefix}.to_v.weight": checkpoint[f"{attention_prefix}.value.weight"],
f"{diffusers_attention_prefix}.to_v.bias": checkpoint[f"{attention_prefix}.value.bias"],
# linear out
f"{diffusers_attention_prefix}.to_out.0.weight": checkpoint[f"{attention_prefix}.proj.weight"],
f"{diffusers_attention_prefix}.to_out.0.bias": checkpoint[f"{attention_prefix}.proj.bias"],
}
def transformer_feedforward_to_diffusers_checkpoint(checkpoint, *, diffusers_feedforward_prefix, feedforward_prefix):
return {
f"{diffusers_feedforward_prefix}.net.0.proj.weight": checkpoint[f"{feedforward_prefix}.0.weight"],
f"{diffusers_feedforward_prefix}.net.0.proj.bias": checkpoint[f"{feedforward_prefix}.0.bias"],
f"{diffusers_feedforward_prefix}.net.2.weight": checkpoint[f"{feedforward_prefix}.2.weight"],
f"{diffusers_feedforward_prefix}.net.2.bias": checkpoint[f"{feedforward_prefix}.2.bias"],
}
# done transformer checkpoint
def read_config_file(filename):
# The yaml file contains annotations that certain values should
# loaded as tuples.
with open(filename) as f:
original_config = yaml.load(f, FullLoader)
return original_config
# We take separate arguments for the vqvae because the ITHQ vqvae config file
# is separate from the config file for the rest of the model.
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument(
"--vqvae_checkpoint_path",
default=None,
type=str,
required=True,
help="Path to the vqvae checkpoint to convert.",
)
parser.add_argument(
"--vqvae_original_config_file",
default=None,
type=str,
required=True,
help="The YAML config file corresponding to the original architecture for the vqvae.",
)
parser.add_argument(
"--checkpoint_path", default=None, type=str, required=True, help="Path to the checkpoint to convert."
)
parser.add_argument(
"--original_config_file",
default=None,
type=str,
required=True,
help="The YAML config file corresponding to the original architecture.",
)
parser.add_argument("--dump_path", default=None, type=str, required=True, help="Path to the output model.")
parser.add_argument(
"--checkpoint_load_device",
default="cpu",
type=str,
required=False,
help="The device passed to `map_location` when loading checkpoints.",
)
# See link for how ema weights are always selected
# https://github.com/microsoft/VQ-Diffusion/blob/3c98e77f721db7c787b76304fa2c96a36c7b00af/inference_VQ_Diffusion.py#L65
parser.add_argument(
"--no_use_ema",
action="store_true",
required=False,
help=(
"Set to not use the ema weights from the original VQ-Diffusion checkpoint. You probably do not want to set"
" it as the original VQ-Diffusion always uses the ema weights when loading models."
),
)
args = parser.parse_args()
use_ema = not args.no_use_ema
print(f"loading checkpoints to {args.checkpoint_load_device}")
checkpoint_map_location = torch.device(args.checkpoint_load_device)
# vqvae_model
print(f"loading vqvae, config: {args.vqvae_original_config_file}, checkpoint: {args.vqvae_checkpoint_path}")
vqvae_original_config = read_config_file(args.vqvae_original_config_file).model
vqvae_checkpoint = torch.load(args.vqvae_checkpoint_path, map_location=checkpoint_map_location)["model"]
with init_empty_weights():
vqvae_model = vqvae_model_from_original_config(vqvae_original_config)
vqvae_diffusers_checkpoint = vqvae_original_checkpoint_to_diffusers_checkpoint(vqvae_model, vqvae_checkpoint)
with tempfile.NamedTemporaryFile() as vqvae_diffusers_checkpoint_file:
torch.save(vqvae_diffusers_checkpoint, vqvae_diffusers_checkpoint_file.name)
del vqvae_diffusers_checkpoint
del vqvae_checkpoint
load_checkpoint_and_dispatch(vqvae_model, vqvae_diffusers_checkpoint_file.name, device_map="auto")
print("done loading vqvae")
# done vqvae_model
# transformer_model
print(
f"loading transformer, config: {args.original_config_file}, checkpoint: {args.checkpoint_path}, use ema:"
f" {use_ema}"
)
original_config = read_config_file(args.original_config_file).model
diffusion_config = original_config["params"]["diffusion_config"]
transformer_config = original_config["params"]["diffusion_config"]["params"]["transformer_config"]
content_embedding_config = original_config["params"]["diffusion_config"]["params"]["content_emb_config"]
pre_checkpoint = torch.load(args.checkpoint_path, map_location=checkpoint_map_location)
if use_ema:
if "ema" in pre_checkpoint:
checkpoint = {}
for k, v in pre_checkpoint["model"].items():
checkpoint[k] = v
for k, v in pre_checkpoint["ema"].items():
# The ema weights are only used on the transformer. To mimic their key as if they came
# from the state_dict for the top level model, we prefix with an additional "transformer."
# See the source linked in the args.use_ema config for more information.
checkpoint[f"transformer.{k}"] = v
else:
print("attempted to load ema weights but no ema weights are specified in the loaded checkpoint.")
checkpoint = pre_checkpoint["model"]
else:
checkpoint = pre_checkpoint["model"]
del pre_checkpoint
with init_empty_weights():
transformer_model = transformer_model_from_original_config(
diffusion_config, transformer_config, content_embedding_config
)
diffusers_transformer_checkpoint = transformer_original_checkpoint_to_diffusers_checkpoint(
transformer_model, checkpoint
)
# classifier free sampling embeddings interlude
# The learned embeddings are stored on the transformer in the original VQ-diffusion. We store them on a separate
# model, so we pull them off the checkpoint before the checkpoint is deleted.
learnable_classifier_free_sampling_embeddings = diffusion_config["params"].learnable_cf
if learnable_classifier_free_sampling_embeddings:
learned_classifier_free_sampling_embeddings_embeddings = checkpoint["transformer.empty_text_embed"]
else:
learned_classifier_free_sampling_embeddings_embeddings = None
# done classifier free sampling embeddings interlude
with tempfile.NamedTemporaryFile() as diffusers_transformer_checkpoint_file:
torch.save(diffusers_transformer_checkpoint, diffusers_transformer_checkpoint_file.name)
del diffusers_transformer_checkpoint
del checkpoint
load_checkpoint_and_dispatch(transformer_model, diffusers_transformer_checkpoint_file.name, device_map="auto")
print("done loading transformer")
# done transformer_model
# text encoder
print("loading CLIP text encoder")
clip_name = "openai/clip-vit-base-patch32"
# The original VQ-Diffusion specifies the pad value by the int used in the
# returned tokens. Each model uses `0` as the pad value. The transformers clip api
# specifies the pad value via the token before it has been tokenized. The `!` pad
# token is the same as padding with the `0` pad value.
pad_token = "!"
tokenizer_model = CLIPTokenizer.from_pretrained(clip_name, pad_token=pad_token, device_map="auto")
assert tokenizer_model.convert_tokens_to_ids(pad_token) == 0
text_encoder_model = CLIPTextModel.from_pretrained(
clip_name,
# `CLIPTextModel` does not support device_map="auto"
# device_map="auto"
)
print("done loading CLIP text encoder")
# done text encoder
# scheduler
scheduler_model = VQDiffusionScheduler(
# the scheduler has the same number of embeddings as the transformer
num_vec_classes=transformer_model.num_vector_embeds
)
# done scheduler
# learned classifier free sampling embeddings
with init_empty_weights():
learned_classifier_free_sampling_embeddings_model = LearnedClassifierFreeSamplingEmbeddings(
learnable_classifier_free_sampling_embeddings,
hidden_size=text_encoder_model.config.hidden_size,
length=tokenizer_model.model_max_length,
)
learned_classifier_free_sampling_checkpoint = {
"embeddings": learned_classifier_free_sampling_embeddings_embeddings.float()
}
with tempfile.NamedTemporaryFile() as learned_classifier_free_sampling_checkpoint_file:
torch.save(learned_classifier_free_sampling_checkpoint, learned_classifier_free_sampling_checkpoint_file.name)
del learned_classifier_free_sampling_checkpoint
del learned_classifier_free_sampling_embeddings_embeddings
load_checkpoint_and_dispatch(
learned_classifier_free_sampling_embeddings_model,
learned_classifier_free_sampling_checkpoint_file.name,
device_map="auto",
)
# done learned classifier free sampling embeddings
print(f"saving VQ diffusion model, path: {args.dump_path}")
pipe = VQDiffusionPipeline(
vqvae=vqvae_model,
transformer=transformer_model,
tokenizer=tokenizer_model,
text_encoder=text_encoder_model,
learned_classifier_free_sampling_embeddings=learned_classifier_free_sampling_embeddings_model,
scheduler=scheduler_model,
)
pipe.save_pretrained(args.dump_path)
print("done writing VQ diffusion model")
| diffusers/scripts/convert_vq_diffusion_to_diffusers.py/0 | {
"file_path": "diffusers/scripts/convert_vq_diffusion_to_diffusers.py",
"repo_id": "diffusers",
"token_count": 14916
} | 105 |
# Copyright 2023 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import numpy as np
import torch
import tqdm
from ...models.unets.unet_1d import UNet1DModel
from ...pipelines import DiffusionPipeline
from ...utils.dummy_pt_objects import DDPMScheduler
from ...utils.torch_utils import randn_tensor
class ValueGuidedRLPipeline(DiffusionPipeline):
r"""
Pipeline for value-guided sampling from a diffusion model trained to predict sequences of states.
This model inherits from [`DiffusionPipeline`]. Check the superclass documentation for the generic methods
implemented for all pipelines (downloading, saving, running on a particular device, etc.).
Parameters:
value_function ([`UNet1DModel`]):
A specialized UNet for fine-tuning trajectories base on reward.
unet ([`UNet1DModel`]):
UNet architecture to denoise the encoded trajectories.
scheduler ([`SchedulerMixin`]):
A scheduler to be used in combination with `unet` to denoise the encoded trajectories. Default for this
application is [`DDPMScheduler`].
env ():
An environment following the OpenAI gym API to act in. For now only Hopper has pretrained models.
"""
def __init__(
self,
value_function: UNet1DModel,
unet: UNet1DModel,
scheduler: DDPMScheduler,
env,
):
super().__init__()
self.register_modules(value_function=value_function, unet=unet, scheduler=scheduler, env=env)
self.data = env.get_dataset()
self.means = {}
for key in self.data.keys():
try:
self.means[key] = self.data[key].mean()
except: # noqa: E722
pass
self.stds = {}
for key in self.data.keys():
try:
self.stds[key] = self.data[key].std()
except: # noqa: E722
pass
self.state_dim = env.observation_space.shape[0]
self.action_dim = env.action_space.shape[0]
def normalize(self, x_in, key):
return (x_in - self.means[key]) / self.stds[key]
def de_normalize(self, x_in, key):
return x_in * self.stds[key] + self.means[key]
def to_torch(self, x_in):
if isinstance(x_in, dict):
return {k: self.to_torch(v) for k, v in x_in.items()}
elif torch.is_tensor(x_in):
return x_in.to(self.unet.device)
return torch.tensor(x_in, device=self.unet.device)
def reset_x0(self, x_in, cond, act_dim):
for key, val in cond.items():
x_in[:, key, act_dim:] = val.clone()
return x_in
def run_diffusion(self, x, conditions, n_guide_steps, scale):
batch_size = x.shape[0]
y = None
for i in tqdm.tqdm(self.scheduler.timesteps):
# create batch of timesteps to pass into model
timesteps = torch.full((batch_size,), i, device=self.unet.device, dtype=torch.long)
for _ in range(n_guide_steps):
with torch.enable_grad():
x.requires_grad_()
# permute to match dimension for pre-trained models
y = self.value_function(x.permute(0, 2, 1), timesteps).sample
grad = torch.autograd.grad([y.sum()], [x])[0]
posterior_variance = self.scheduler._get_variance(i)
model_std = torch.exp(0.5 * posterior_variance)
grad = model_std * grad
grad[timesteps < 2] = 0
x = x.detach()
x = x + scale * grad
x = self.reset_x0(x, conditions, self.action_dim)
prev_x = self.unet(x.permute(0, 2, 1), timesteps).sample.permute(0, 2, 1)
# TODO: verify deprecation of this kwarg
x = self.scheduler.step(prev_x, i, x)["prev_sample"]
# apply conditions to the trajectory (set the initial state)
x = self.reset_x0(x, conditions, self.action_dim)
x = self.to_torch(x)
return x, y
def __call__(self, obs, batch_size=64, planning_horizon=32, n_guide_steps=2, scale=0.1):
# normalize the observations and create batch dimension
obs = self.normalize(obs, "observations")
obs = obs[None].repeat(batch_size, axis=0)
conditions = {0: self.to_torch(obs)}
shape = (batch_size, planning_horizon, self.state_dim + self.action_dim)
# generate initial noise and apply our conditions (to make the trajectories start at current state)
x1 = randn_tensor(shape, device=self.unet.device)
x = self.reset_x0(x1, conditions, self.action_dim)
x = self.to_torch(x)
# run the diffusion process
x, y = self.run_diffusion(x, conditions, n_guide_steps, scale)
# sort output trajectories by value
sorted_idx = y.argsort(0, descending=True).squeeze()
sorted_values = x[sorted_idx]
actions = sorted_values[:, :, : self.action_dim]
actions = actions.detach().cpu().numpy()
denorm_actions = self.de_normalize(actions, key="actions")
# select the action with the highest value
if y is not None:
selected_index = 0
else:
# if we didn't run value guiding, select a random action
selected_index = np.random.randint(0, batch_size)
denorm_actions = denorm_actions[selected_index, 0]
return denorm_actions
| diffusers/src/diffusers/experimental/rl/value_guided_sampling.py/0 | {
"file_path": "diffusers/src/diffusers/experimental/rl/value_guided_sampling.py",
"repo_id": "diffusers",
"token_count": 2640
} | 106 |
# coding=utf-8
# Copyright 2023 HuggingFace Inc.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import torch
import torch.nn.functional as F
from torch import nn
from ..utils import USE_PEFT_BACKEND
from .lora import LoRACompatibleLinear
ACTIVATION_FUNCTIONS = {
"swish": nn.SiLU(),
"silu": nn.SiLU(),
"mish": nn.Mish(),
"gelu": nn.GELU(),
"relu": nn.ReLU(),
}
def get_activation(act_fn: str) -> nn.Module:
"""Helper function to get activation function from string.
Args:
act_fn (str): Name of activation function.
Returns:
nn.Module: Activation function.
"""
act_fn = act_fn.lower()
if act_fn in ACTIVATION_FUNCTIONS:
return ACTIVATION_FUNCTIONS[act_fn]
else:
raise ValueError(f"Unsupported activation function: {act_fn}")
class GELU(nn.Module):
r"""
GELU activation function with tanh approximation support with `approximate="tanh"`.
Parameters:
dim_in (`int`): The number of channels in the input.
dim_out (`int`): The number of channels in the output.
approximate (`str`, *optional*, defaults to `"none"`): If `"tanh"`, use tanh approximation.
bias (`bool`, defaults to True): Whether to use a bias in the linear layer.
"""
def __init__(self, dim_in: int, dim_out: int, approximate: str = "none", bias: bool = True):
super().__init__()
self.proj = nn.Linear(dim_in, dim_out, bias=bias)
self.approximate = approximate
def gelu(self, gate: torch.Tensor) -> torch.Tensor:
if gate.device.type != "mps":
return F.gelu(gate, approximate=self.approximate)
# mps: gelu is not implemented for float16
return F.gelu(gate.to(dtype=torch.float32), approximate=self.approximate).to(dtype=gate.dtype)
def forward(self, hidden_states):
hidden_states = self.proj(hidden_states)
hidden_states = self.gelu(hidden_states)
return hidden_states
class GEGLU(nn.Module):
r"""
A [variant](https://arxiv.org/abs/2002.05202) of the gated linear unit activation function.
Parameters:
dim_in (`int`): The number of channels in the input.
dim_out (`int`): The number of channels in the output.
bias (`bool`, defaults to True): Whether to use a bias in the linear layer.
"""
def __init__(self, dim_in: int, dim_out: int, bias: bool = True):
super().__init__()
linear_cls = LoRACompatibleLinear if not USE_PEFT_BACKEND else nn.Linear
self.proj = linear_cls(dim_in, dim_out * 2, bias=bias)
def gelu(self, gate: torch.Tensor) -> torch.Tensor:
if gate.device.type != "mps":
return F.gelu(gate)
# mps: gelu is not implemented for float16
return F.gelu(gate.to(dtype=torch.float32)).to(dtype=gate.dtype)
def forward(self, hidden_states, scale: float = 1.0):
args = () if USE_PEFT_BACKEND else (scale,)
hidden_states, gate = self.proj(hidden_states, *args).chunk(2, dim=-1)
return hidden_states * self.gelu(gate)
class ApproximateGELU(nn.Module):
r"""
The approximate form of the Gaussian Error Linear Unit (GELU). For more details, see section 2 of this
[paper](https://arxiv.org/abs/1606.08415).
Parameters:
dim_in (`int`): The number of channels in the input.
dim_out (`int`): The number of channels in the output.
bias (`bool`, defaults to True): Whether to use a bias in the linear layer.
"""
def __init__(self, dim_in: int, dim_out: int, bias: bool = True):
super().__init__()
self.proj = nn.Linear(dim_in, dim_out, bias=bias)
def forward(self, x: torch.Tensor) -> torch.Tensor:
x = self.proj(x)
return x * torch.sigmoid(1.702 * x)
| diffusers/src/diffusers/models/activations.py/0 | {
"file_path": "diffusers/src/diffusers/models/activations.py",
"repo_id": "diffusers",
"token_count": 1679
} | 107 |
# Copyright 2023 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import math
from typing import List, Optional, Tuple, Union
import numpy as np
import torch
from torch import nn
from ..utils import USE_PEFT_BACKEND, deprecate
from .activations import get_activation
from .attention_processor import Attention
from .lora import LoRACompatibleLinear
def get_timestep_embedding(
timesteps: torch.Tensor,
embedding_dim: int,
flip_sin_to_cos: bool = False,
downscale_freq_shift: float = 1,
scale: float = 1,
max_period: int = 10000,
):
"""
This matches the implementation in Denoising Diffusion Probabilistic Models: Create sinusoidal timestep embeddings.
:param timesteps: a 1-D Tensor of N indices, one per batch element.
These may be fractional.
:param embedding_dim: the dimension of the output. :param max_period: controls the minimum frequency of the
embeddings. :return: an [N x dim] Tensor of positional embeddings.
"""
assert len(timesteps.shape) == 1, "Timesteps should be a 1d-array"
half_dim = embedding_dim // 2
exponent = -math.log(max_period) * torch.arange(
start=0, end=half_dim, dtype=torch.float32, device=timesteps.device
)
exponent = exponent / (half_dim - downscale_freq_shift)
emb = torch.exp(exponent)
emb = timesteps[:, None].float() * emb[None, :]
# scale embeddings
emb = scale * emb
# concat sine and cosine embeddings
emb = torch.cat([torch.sin(emb), torch.cos(emb)], dim=-1)
# flip sine and cosine embeddings
if flip_sin_to_cos:
emb = torch.cat([emb[:, half_dim:], emb[:, :half_dim]], dim=-1)
# zero pad
if embedding_dim % 2 == 1:
emb = torch.nn.functional.pad(emb, (0, 1, 0, 0))
return emb
def get_2d_sincos_pos_embed(
embed_dim, grid_size, cls_token=False, extra_tokens=0, interpolation_scale=1.0, base_size=16
):
"""
grid_size: int of the grid height and width return: pos_embed: [grid_size*grid_size, embed_dim] or
[1+grid_size*grid_size, embed_dim] (w/ or w/o cls_token)
"""
if isinstance(grid_size, int):
grid_size = (grid_size, grid_size)
grid_h = np.arange(grid_size[0], dtype=np.float32) / (grid_size[0] / base_size) / interpolation_scale
grid_w = np.arange(grid_size[1], dtype=np.float32) / (grid_size[1] / base_size) / interpolation_scale
grid = np.meshgrid(grid_w, grid_h) # here w goes first
grid = np.stack(grid, axis=0)
grid = grid.reshape([2, 1, grid_size[1], grid_size[0]])
pos_embed = get_2d_sincos_pos_embed_from_grid(embed_dim, grid)
if cls_token and extra_tokens > 0:
pos_embed = np.concatenate([np.zeros([extra_tokens, embed_dim]), pos_embed], axis=0)
return pos_embed
def get_2d_sincos_pos_embed_from_grid(embed_dim, grid):
if embed_dim % 2 != 0:
raise ValueError("embed_dim must be divisible by 2")
# use half of dimensions to encode grid_h
emb_h = get_1d_sincos_pos_embed_from_grid(embed_dim // 2, grid[0]) # (H*W, D/2)
emb_w = get_1d_sincos_pos_embed_from_grid(embed_dim // 2, grid[1]) # (H*W, D/2)
emb = np.concatenate([emb_h, emb_w], axis=1) # (H*W, D)
return emb
def get_1d_sincos_pos_embed_from_grid(embed_dim, pos):
"""
embed_dim: output dimension for each position pos: a list of positions to be encoded: size (M,) out: (M, D)
"""
if embed_dim % 2 != 0:
raise ValueError("embed_dim must be divisible by 2")
omega = np.arange(embed_dim // 2, dtype=np.float64)
omega /= embed_dim / 2.0
omega = 1.0 / 10000**omega # (D/2,)
pos = pos.reshape(-1) # (M,)
out = np.einsum("m,d->md", pos, omega) # (M, D/2), outer product
emb_sin = np.sin(out) # (M, D/2)
emb_cos = np.cos(out) # (M, D/2)
emb = np.concatenate([emb_sin, emb_cos], axis=1) # (M, D)
return emb
class PatchEmbed(nn.Module):
"""2D Image to Patch Embedding"""
def __init__(
self,
height=224,
width=224,
patch_size=16,
in_channels=3,
embed_dim=768,
layer_norm=False,
flatten=True,
bias=True,
interpolation_scale=1,
):
super().__init__()
num_patches = (height // patch_size) * (width // patch_size)
self.flatten = flatten
self.layer_norm = layer_norm
self.proj = nn.Conv2d(
in_channels, embed_dim, kernel_size=(patch_size, patch_size), stride=patch_size, bias=bias
)
if layer_norm:
self.norm = nn.LayerNorm(embed_dim, elementwise_affine=False, eps=1e-6)
else:
self.norm = None
self.patch_size = patch_size
# See:
# https://github.com/PixArt-alpha/PixArt-alpha/blob/0f55e922376d8b797edd44d25d0e7464b260dcab/diffusion/model/nets/PixArtMS.py#L161
self.height, self.width = height // patch_size, width // patch_size
self.base_size = height // patch_size
self.interpolation_scale = interpolation_scale
pos_embed = get_2d_sincos_pos_embed(
embed_dim, int(num_patches**0.5), base_size=self.base_size, interpolation_scale=self.interpolation_scale
)
self.register_buffer("pos_embed", torch.from_numpy(pos_embed).float().unsqueeze(0), persistent=False)
def forward(self, latent):
height, width = latent.shape[-2] // self.patch_size, latent.shape[-1] // self.patch_size
latent = self.proj(latent)
if self.flatten:
latent = latent.flatten(2).transpose(1, 2) # BCHW -> BNC
if self.layer_norm:
latent = self.norm(latent)
# Interpolate positional embeddings if needed.
# (For PixArt-Alpha: https://github.com/PixArt-alpha/PixArt-alpha/blob/0f55e922376d8b797edd44d25d0e7464b260dcab/diffusion/model/nets/PixArtMS.py#L162C151-L162C160)
if self.height != height or self.width != width:
pos_embed = get_2d_sincos_pos_embed(
embed_dim=self.pos_embed.shape[-1],
grid_size=(height, width),
base_size=self.base_size,
interpolation_scale=self.interpolation_scale,
)
pos_embed = torch.from_numpy(pos_embed)
pos_embed = pos_embed.float().unsqueeze(0).to(latent.device)
else:
pos_embed = self.pos_embed
return (latent + pos_embed).to(latent.dtype)
class TimestepEmbedding(nn.Module):
def __init__(
self,
in_channels: int,
time_embed_dim: int,
act_fn: str = "silu",
out_dim: int = None,
post_act_fn: Optional[str] = None,
cond_proj_dim=None,
sample_proj_bias=True,
):
super().__init__()
linear_cls = nn.Linear if USE_PEFT_BACKEND else LoRACompatibleLinear
self.linear_1 = linear_cls(in_channels, time_embed_dim, sample_proj_bias)
if cond_proj_dim is not None:
self.cond_proj = nn.Linear(cond_proj_dim, in_channels, bias=False)
else:
self.cond_proj = None
self.act = get_activation(act_fn)
if out_dim is not None:
time_embed_dim_out = out_dim
else:
time_embed_dim_out = time_embed_dim
self.linear_2 = linear_cls(time_embed_dim, time_embed_dim_out, sample_proj_bias)
if post_act_fn is None:
self.post_act = None
else:
self.post_act = get_activation(post_act_fn)
def forward(self, sample, condition=None):
if condition is not None:
sample = sample + self.cond_proj(condition)
sample = self.linear_1(sample)
if self.act is not None:
sample = self.act(sample)
sample = self.linear_2(sample)
if self.post_act is not None:
sample = self.post_act(sample)
return sample
class Timesteps(nn.Module):
def __init__(self, num_channels: int, flip_sin_to_cos: bool, downscale_freq_shift: float):
super().__init__()
self.num_channels = num_channels
self.flip_sin_to_cos = flip_sin_to_cos
self.downscale_freq_shift = downscale_freq_shift
def forward(self, timesteps):
t_emb = get_timestep_embedding(
timesteps,
self.num_channels,
flip_sin_to_cos=self.flip_sin_to_cos,
downscale_freq_shift=self.downscale_freq_shift,
)
return t_emb
class GaussianFourierProjection(nn.Module):
"""Gaussian Fourier embeddings for noise levels."""
def __init__(
self, embedding_size: int = 256, scale: float = 1.0, set_W_to_weight=True, log=True, flip_sin_to_cos=False
):
super().__init__()
self.weight = nn.Parameter(torch.randn(embedding_size) * scale, requires_grad=False)
self.log = log
self.flip_sin_to_cos = flip_sin_to_cos
if set_W_to_weight:
# to delete later
self.W = nn.Parameter(torch.randn(embedding_size) * scale, requires_grad=False)
self.weight = self.W
def forward(self, x):
if self.log:
x = torch.log(x)
x_proj = x[:, None] * self.weight[None, :] * 2 * np.pi
if self.flip_sin_to_cos:
out = torch.cat([torch.cos(x_proj), torch.sin(x_proj)], dim=-1)
else:
out = torch.cat([torch.sin(x_proj), torch.cos(x_proj)], dim=-1)
return out
class SinusoidalPositionalEmbedding(nn.Module):
"""Apply positional information to a sequence of embeddings.
Takes in a sequence of embeddings with shape (batch_size, seq_length, embed_dim) and adds positional embeddings to
them
Args:
embed_dim: (int): Dimension of the positional embedding.
max_seq_length: Maximum sequence length to apply positional embeddings
"""
def __init__(self, embed_dim: int, max_seq_length: int = 32):
super().__init__()
position = torch.arange(max_seq_length).unsqueeze(1)
div_term = torch.exp(torch.arange(0, embed_dim, 2) * (-math.log(10000.0) / embed_dim))
pe = torch.zeros(1, max_seq_length, embed_dim)
pe[0, :, 0::2] = torch.sin(position * div_term)
pe[0, :, 1::2] = torch.cos(position * div_term)
self.register_buffer("pe", pe)
def forward(self, x):
_, seq_length, _ = x.shape
x = x + self.pe[:, :seq_length]
return x
class ImagePositionalEmbeddings(nn.Module):
"""
Converts latent image classes into vector embeddings. Sums the vector embeddings with positional embeddings for the
height and width of the latent space.
For more details, see figure 10 of the dall-e paper: https://arxiv.org/abs/2102.12092
For VQ-diffusion:
Output vector embeddings are used as input for the transformer.
Note that the vector embeddings for the transformer are different than the vector embeddings from the VQVAE.
Args:
num_embed (`int`):
Number of embeddings for the latent pixels embeddings.
height (`int`):
Height of the latent image i.e. the number of height embeddings.
width (`int`):
Width of the latent image i.e. the number of width embeddings.
embed_dim (`int`):
Dimension of the produced vector embeddings. Used for the latent pixel, height, and width embeddings.
"""
def __init__(
self,
num_embed: int,
height: int,
width: int,
embed_dim: int,
):
super().__init__()
self.height = height
self.width = width
self.num_embed = num_embed
self.embed_dim = embed_dim
self.emb = nn.Embedding(self.num_embed, embed_dim)
self.height_emb = nn.Embedding(self.height, embed_dim)
self.width_emb = nn.Embedding(self.width, embed_dim)
def forward(self, index):
emb = self.emb(index)
height_emb = self.height_emb(torch.arange(self.height, device=index.device).view(1, self.height))
# 1 x H x D -> 1 x H x 1 x D
height_emb = height_emb.unsqueeze(2)
width_emb = self.width_emb(torch.arange(self.width, device=index.device).view(1, self.width))
# 1 x W x D -> 1 x 1 x W x D
width_emb = width_emb.unsqueeze(1)
pos_emb = height_emb + width_emb
# 1 x H x W x D -> 1 x L xD
pos_emb = pos_emb.view(1, self.height * self.width, -1)
emb = emb + pos_emb[:, : emb.shape[1], :]
return emb
class LabelEmbedding(nn.Module):
"""
Embeds class labels into vector representations. Also handles label dropout for classifier-free guidance.
Args:
num_classes (`int`): The number of classes.
hidden_size (`int`): The size of the vector embeddings.
dropout_prob (`float`): The probability of dropping a label.
"""
def __init__(self, num_classes, hidden_size, dropout_prob):
super().__init__()
use_cfg_embedding = dropout_prob > 0
self.embedding_table = nn.Embedding(num_classes + use_cfg_embedding, hidden_size)
self.num_classes = num_classes
self.dropout_prob = dropout_prob
def token_drop(self, labels, force_drop_ids=None):
"""
Drops labels to enable classifier-free guidance.
"""
if force_drop_ids is None:
drop_ids = torch.rand(labels.shape[0], device=labels.device) < self.dropout_prob
else:
drop_ids = torch.tensor(force_drop_ids == 1)
labels = torch.where(drop_ids, self.num_classes, labels)
return labels
def forward(self, labels: torch.LongTensor, force_drop_ids=None):
use_dropout = self.dropout_prob > 0
if (self.training and use_dropout) or (force_drop_ids is not None):
labels = self.token_drop(labels, force_drop_ids)
embeddings = self.embedding_table(labels)
return embeddings
class TextImageProjection(nn.Module):
def __init__(
self,
text_embed_dim: int = 1024,
image_embed_dim: int = 768,
cross_attention_dim: int = 768,
num_image_text_embeds: int = 10,
):
super().__init__()
self.num_image_text_embeds = num_image_text_embeds
self.image_embeds = nn.Linear(image_embed_dim, self.num_image_text_embeds * cross_attention_dim)
self.text_proj = nn.Linear(text_embed_dim, cross_attention_dim)
def forward(self, text_embeds: torch.FloatTensor, image_embeds: torch.FloatTensor):
batch_size = text_embeds.shape[0]
# image
image_text_embeds = self.image_embeds(image_embeds)
image_text_embeds = image_text_embeds.reshape(batch_size, self.num_image_text_embeds, -1)
# text
text_embeds = self.text_proj(text_embeds)
return torch.cat([image_text_embeds, text_embeds], dim=1)
class ImageProjection(nn.Module):
def __init__(
self,
image_embed_dim: int = 768,
cross_attention_dim: int = 768,
num_image_text_embeds: int = 32,
):
super().__init__()
self.num_image_text_embeds = num_image_text_embeds
self.image_embeds = nn.Linear(image_embed_dim, self.num_image_text_embeds * cross_attention_dim)
self.norm = nn.LayerNorm(cross_attention_dim)
def forward(self, image_embeds: torch.FloatTensor):
batch_size = image_embeds.shape[0]
# image
image_embeds = self.image_embeds(image_embeds)
image_embeds = image_embeds.reshape(batch_size, self.num_image_text_embeds, -1)
image_embeds = self.norm(image_embeds)
return image_embeds
class IPAdapterFullImageProjection(nn.Module):
def __init__(self, image_embed_dim=1024, cross_attention_dim=1024):
super().__init__()
from .attention import FeedForward
self.ff = FeedForward(image_embed_dim, cross_attention_dim, mult=1, activation_fn="gelu")
self.norm = nn.LayerNorm(cross_attention_dim)
def forward(self, image_embeds: torch.FloatTensor):
return self.norm(self.ff(image_embeds))
class CombinedTimestepLabelEmbeddings(nn.Module):
def __init__(self, num_classes, embedding_dim, class_dropout_prob=0.1):
super().__init__()
self.time_proj = Timesteps(num_channels=256, flip_sin_to_cos=True, downscale_freq_shift=1)
self.timestep_embedder = TimestepEmbedding(in_channels=256, time_embed_dim=embedding_dim)
self.class_embedder = LabelEmbedding(num_classes, embedding_dim, class_dropout_prob)
def forward(self, timestep, class_labels, hidden_dtype=None):
timesteps_proj = self.time_proj(timestep)
timesteps_emb = self.timestep_embedder(timesteps_proj.to(dtype=hidden_dtype)) # (N, D)
class_labels = self.class_embedder(class_labels) # (N, D)
conditioning = timesteps_emb + class_labels # (N, D)
return conditioning
class TextTimeEmbedding(nn.Module):
def __init__(self, encoder_dim: int, time_embed_dim: int, num_heads: int = 64):
super().__init__()
self.norm1 = nn.LayerNorm(encoder_dim)
self.pool = AttentionPooling(num_heads, encoder_dim)
self.proj = nn.Linear(encoder_dim, time_embed_dim)
self.norm2 = nn.LayerNorm(time_embed_dim)
def forward(self, hidden_states):
hidden_states = self.norm1(hidden_states)
hidden_states = self.pool(hidden_states)
hidden_states = self.proj(hidden_states)
hidden_states = self.norm2(hidden_states)
return hidden_states
class TextImageTimeEmbedding(nn.Module):
def __init__(self, text_embed_dim: int = 768, image_embed_dim: int = 768, time_embed_dim: int = 1536):
super().__init__()
self.text_proj = nn.Linear(text_embed_dim, time_embed_dim)
self.text_norm = nn.LayerNorm(time_embed_dim)
self.image_proj = nn.Linear(image_embed_dim, time_embed_dim)
def forward(self, text_embeds: torch.FloatTensor, image_embeds: torch.FloatTensor):
# text
time_text_embeds = self.text_proj(text_embeds)
time_text_embeds = self.text_norm(time_text_embeds)
# image
time_image_embeds = self.image_proj(image_embeds)
return time_image_embeds + time_text_embeds
class ImageTimeEmbedding(nn.Module):
def __init__(self, image_embed_dim: int = 768, time_embed_dim: int = 1536):
super().__init__()
self.image_proj = nn.Linear(image_embed_dim, time_embed_dim)
self.image_norm = nn.LayerNorm(time_embed_dim)
def forward(self, image_embeds: torch.FloatTensor):
# image
time_image_embeds = self.image_proj(image_embeds)
time_image_embeds = self.image_norm(time_image_embeds)
return time_image_embeds
class ImageHintTimeEmbedding(nn.Module):
def __init__(self, image_embed_dim: int = 768, time_embed_dim: int = 1536):
super().__init__()
self.image_proj = nn.Linear(image_embed_dim, time_embed_dim)
self.image_norm = nn.LayerNorm(time_embed_dim)
self.input_hint_block = nn.Sequential(
nn.Conv2d(3, 16, 3, padding=1),
nn.SiLU(),
nn.Conv2d(16, 16, 3, padding=1),
nn.SiLU(),
nn.Conv2d(16, 32, 3, padding=1, stride=2),
nn.SiLU(),
nn.Conv2d(32, 32, 3, padding=1),
nn.SiLU(),
nn.Conv2d(32, 96, 3, padding=1, stride=2),
nn.SiLU(),
nn.Conv2d(96, 96, 3, padding=1),
nn.SiLU(),
nn.Conv2d(96, 256, 3, padding=1, stride=2),
nn.SiLU(),
nn.Conv2d(256, 4, 3, padding=1),
)
def forward(self, image_embeds: torch.FloatTensor, hint: torch.FloatTensor):
# image
time_image_embeds = self.image_proj(image_embeds)
time_image_embeds = self.image_norm(time_image_embeds)
hint = self.input_hint_block(hint)
return time_image_embeds, hint
class AttentionPooling(nn.Module):
# Copied from https://github.com/deep-floyd/IF/blob/2f91391f27dd3c468bf174be5805b4cc92980c0b/deepfloyd_if/model/nn.py#L54
def __init__(self, num_heads, embed_dim, dtype=None):
super().__init__()
self.dtype = dtype
self.positional_embedding = nn.Parameter(torch.randn(1, embed_dim) / embed_dim**0.5)
self.k_proj = nn.Linear(embed_dim, embed_dim, dtype=self.dtype)
self.q_proj = nn.Linear(embed_dim, embed_dim, dtype=self.dtype)
self.v_proj = nn.Linear(embed_dim, embed_dim, dtype=self.dtype)
self.num_heads = num_heads
self.dim_per_head = embed_dim // self.num_heads
def forward(self, x):
bs, length, width = x.size()
def shape(x):
# (bs, length, width) --> (bs, length, n_heads, dim_per_head)
x = x.view(bs, -1, self.num_heads, self.dim_per_head)
# (bs, length, n_heads, dim_per_head) --> (bs, n_heads, length, dim_per_head)
x = x.transpose(1, 2)
# (bs, n_heads, length, dim_per_head) --> (bs*n_heads, length, dim_per_head)
x = x.reshape(bs * self.num_heads, -1, self.dim_per_head)
# (bs*n_heads, length, dim_per_head) --> (bs*n_heads, dim_per_head, length)
x = x.transpose(1, 2)
return x
class_token = x.mean(dim=1, keepdim=True) + self.positional_embedding.to(x.dtype)
x = torch.cat([class_token, x], dim=1) # (bs, length+1, width)
# (bs*n_heads, class_token_length, dim_per_head)
q = shape(self.q_proj(class_token))
# (bs*n_heads, length+class_token_length, dim_per_head)
k = shape(self.k_proj(x))
v = shape(self.v_proj(x))
# (bs*n_heads, class_token_length, length+class_token_length):
scale = 1 / math.sqrt(math.sqrt(self.dim_per_head))
weight = torch.einsum("bct,bcs->bts", q * scale, k * scale) # More stable with f16 than dividing afterwards
weight = torch.softmax(weight.float(), dim=-1).type(weight.dtype)
# (bs*n_heads, dim_per_head, class_token_length)
a = torch.einsum("bts,bcs->bct", weight, v)
# (bs, length+1, width)
a = a.reshape(bs, -1, 1).transpose(1, 2)
return a[:, 0, :] # cls_token
def get_fourier_embeds_from_boundingbox(embed_dim, box):
"""
Args:
embed_dim: int
box: a 3-D tensor [B x N x 4] representing the bounding boxes for GLIGEN pipeline
Returns:
[B x N x embed_dim] tensor of positional embeddings
"""
batch_size, num_boxes = box.shape[:2]
emb = 100 ** (torch.arange(embed_dim) / embed_dim)
emb = emb[None, None, None].to(device=box.device, dtype=box.dtype)
emb = emb * box.unsqueeze(-1)
emb = torch.stack((emb.sin(), emb.cos()), dim=-1)
emb = emb.permute(0, 1, 3, 4, 2).reshape(batch_size, num_boxes, embed_dim * 2 * 4)
return emb
class GLIGENTextBoundingboxProjection(nn.Module):
def __init__(self, positive_len, out_dim, feature_type="text-only", fourier_freqs=8):
super().__init__()
self.positive_len = positive_len
self.out_dim = out_dim
self.fourier_embedder_dim = fourier_freqs
self.position_dim = fourier_freqs * 2 * 4 # 2: sin/cos, 4: xyxy
if isinstance(out_dim, tuple):
out_dim = out_dim[0]
if feature_type == "text-only":
self.linears = nn.Sequential(
nn.Linear(self.positive_len + self.position_dim, 512),
nn.SiLU(),
nn.Linear(512, 512),
nn.SiLU(),
nn.Linear(512, out_dim),
)
self.null_positive_feature = torch.nn.Parameter(torch.zeros([self.positive_len]))
elif feature_type == "text-image":
self.linears_text = nn.Sequential(
nn.Linear(self.positive_len + self.position_dim, 512),
nn.SiLU(),
nn.Linear(512, 512),
nn.SiLU(),
nn.Linear(512, out_dim),
)
self.linears_image = nn.Sequential(
nn.Linear(self.positive_len + self.position_dim, 512),
nn.SiLU(),
nn.Linear(512, 512),
nn.SiLU(),
nn.Linear(512, out_dim),
)
self.null_text_feature = torch.nn.Parameter(torch.zeros([self.positive_len]))
self.null_image_feature = torch.nn.Parameter(torch.zeros([self.positive_len]))
self.null_position_feature = torch.nn.Parameter(torch.zeros([self.position_dim]))
def forward(
self,
boxes,
masks,
positive_embeddings=None,
phrases_masks=None,
image_masks=None,
phrases_embeddings=None,
image_embeddings=None,
):
masks = masks.unsqueeze(-1)
# embedding position (it may includes padding as placeholder)
xyxy_embedding = get_fourier_embeds_from_boundingbox(self.fourier_embedder_dim, boxes) # B*N*4 -> B*N*C
# learnable null embedding
xyxy_null = self.null_position_feature.view(1, 1, -1)
# replace padding with learnable null embedding
xyxy_embedding = xyxy_embedding * masks + (1 - masks) * xyxy_null
# positionet with text only information
if positive_embeddings is not None:
# learnable null embedding
positive_null = self.null_positive_feature.view(1, 1, -1)
# replace padding with learnable null embedding
positive_embeddings = positive_embeddings * masks + (1 - masks) * positive_null
objs = self.linears(torch.cat([positive_embeddings, xyxy_embedding], dim=-1))
# positionet with text and image infomation
else:
phrases_masks = phrases_masks.unsqueeze(-1)
image_masks = image_masks.unsqueeze(-1)
# learnable null embedding
text_null = self.null_text_feature.view(1, 1, -1)
image_null = self.null_image_feature.view(1, 1, -1)
# replace padding with learnable null embedding
phrases_embeddings = phrases_embeddings * phrases_masks + (1 - phrases_masks) * text_null
image_embeddings = image_embeddings * image_masks + (1 - image_masks) * image_null
objs_text = self.linears_text(torch.cat([phrases_embeddings, xyxy_embedding], dim=-1))
objs_image = self.linears_image(torch.cat([image_embeddings, xyxy_embedding], dim=-1))
objs = torch.cat([objs_text, objs_image], dim=1)
return objs
class PixArtAlphaCombinedTimestepSizeEmbeddings(nn.Module):
"""
For PixArt-Alpha.
Reference:
https://github.com/PixArt-alpha/PixArt-alpha/blob/0f55e922376d8b797edd44d25d0e7464b260dcab/diffusion/model/nets/PixArtMS.py#L164C9-L168C29
"""
def __init__(self, embedding_dim, size_emb_dim, use_additional_conditions: bool = False):
super().__init__()
self.outdim = size_emb_dim
self.time_proj = Timesteps(num_channels=256, flip_sin_to_cos=True, downscale_freq_shift=0)
self.timestep_embedder = TimestepEmbedding(in_channels=256, time_embed_dim=embedding_dim)
self.use_additional_conditions = use_additional_conditions
if use_additional_conditions:
self.additional_condition_proj = Timesteps(num_channels=256, flip_sin_to_cos=True, downscale_freq_shift=0)
self.resolution_embedder = TimestepEmbedding(in_channels=256, time_embed_dim=size_emb_dim)
self.aspect_ratio_embedder = TimestepEmbedding(in_channels=256, time_embed_dim=size_emb_dim)
def forward(self, timestep, resolution, aspect_ratio, batch_size, hidden_dtype):
timesteps_proj = self.time_proj(timestep)
timesteps_emb = self.timestep_embedder(timesteps_proj.to(dtype=hidden_dtype)) # (N, D)
if self.use_additional_conditions:
resolution_emb = self.additional_condition_proj(resolution.flatten()).to(hidden_dtype)
resolution_emb = self.resolution_embedder(resolution_emb).reshape(batch_size, -1)
aspect_ratio_emb = self.additional_condition_proj(aspect_ratio.flatten()).to(hidden_dtype)
aspect_ratio_emb = self.aspect_ratio_embedder(aspect_ratio_emb).reshape(batch_size, -1)
conditioning = timesteps_emb + torch.cat([resolution_emb, aspect_ratio_emb], dim=1)
else:
conditioning = timesteps_emb
return conditioning
class PixArtAlphaTextProjection(nn.Module):
"""
Projects caption embeddings. Also handles dropout for classifier-free guidance.
Adapted from https://github.com/PixArt-alpha/PixArt-alpha/blob/master/diffusion/model/nets/PixArt_blocks.py
"""
def __init__(self, in_features, hidden_size, num_tokens=120):
super().__init__()
self.linear_1 = nn.Linear(in_features=in_features, out_features=hidden_size, bias=True)
self.act_1 = nn.GELU(approximate="tanh")
self.linear_2 = nn.Linear(in_features=hidden_size, out_features=hidden_size, bias=True)
def forward(self, caption):
hidden_states = self.linear_1(caption)
hidden_states = self.act_1(hidden_states)
hidden_states = self.linear_2(hidden_states)
return hidden_states
class IPAdapterPlusImageProjection(nn.Module):
"""Resampler of IP-Adapter Plus.
Args:
----
embed_dims (int): The feature dimension. Defaults to 768.
output_dims (int): The number of output channels, that is the same
number of the channels in the
`unet.config.cross_attention_dim`. Defaults to 1024.
hidden_dims (int): The number of hidden channels. Defaults to 1280.
depth (int): The number of blocks. Defaults to 8.
dim_head (int): The number of head channels. Defaults to 64.
heads (int): Parallel attention heads. Defaults to 16.
num_queries (int): The number of queries. Defaults to 8.
ffn_ratio (float): The expansion ratio of feedforward network hidden
layer channels. Defaults to 4.
"""
def __init__(
self,
embed_dims: int = 768,
output_dims: int = 1024,
hidden_dims: int = 1280,
depth: int = 4,
dim_head: int = 64,
heads: int = 16,
num_queries: int = 8,
ffn_ratio: float = 4,
) -> None:
super().__init__()
from .attention import FeedForward # Lazy import to avoid circular import
self.latents = nn.Parameter(torch.randn(1, num_queries, hidden_dims) / hidden_dims**0.5)
self.proj_in = nn.Linear(embed_dims, hidden_dims)
self.proj_out = nn.Linear(hidden_dims, output_dims)
self.norm_out = nn.LayerNorm(output_dims)
self.layers = nn.ModuleList([])
for _ in range(depth):
self.layers.append(
nn.ModuleList(
[
nn.LayerNorm(hidden_dims),
nn.LayerNorm(hidden_dims),
Attention(
query_dim=hidden_dims,
dim_head=dim_head,
heads=heads,
out_bias=False,
),
nn.Sequential(
nn.LayerNorm(hidden_dims),
FeedForward(hidden_dims, hidden_dims, activation_fn="gelu", mult=ffn_ratio, bias=False),
),
]
)
)
def forward(self, x: torch.Tensor) -> torch.Tensor:
"""Forward pass.
Args:
----
x (torch.Tensor): Input Tensor.
Returns:
-------
torch.Tensor: Output Tensor.
"""
latents = self.latents.repeat(x.size(0), 1, 1)
x = self.proj_in(x)
for ln0, ln1, attn, ff in self.layers:
residual = latents
encoder_hidden_states = ln0(x)
latents = ln1(latents)
encoder_hidden_states = torch.cat([encoder_hidden_states, latents], dim=-2)
latents = attn(latents, encoder_hidden_states) + residual
latents = ff(latents) + latents
latents = self.proj_out(latents)
return self.norm_out(latents)
class MultiIPAdapterImageProjection(nn.Module):
def __init__(self, IPAdapterImageProjectionLayers: Union[List[nn.Module], Tuple[nn.Module]]):
super().__init__()
self.image_projection_layers = nn.ModuleList(IPAdapterImageProjectionLayers)
def forward(self, image_embeds: List[torch.FloatTensor]):
projected_image_embeds = []
# currently, we accept `image_embeds` as
# 1. a tensor (deprecated) with shape [batch_size, embed_dim] or [batch_size, sequence_length, embed_dim]
# 2. list of `n` tensors where `n` is number of ip-adapters, each tensor can hae shape [batch_size, num_images, embed_dim] or [batch_size, num_images, sequence_length, embed_dim]
if not isinstance(image_embeds, list):
deprecation_message = (
"You have passed a tensor as `image_embeds`.This is deprecated and will be removed in a future release."
" Please make sure to update your script to pass `image_embeds` as a list of tensors to supress this warning."
)
deprecate("image_embeds not a list", "1.0.0", deprecation_message, standard_warn=False)
image_embeds = [image_embeds.unsqueeze(1)]
if len(image_embeds) != len(self.image_projection_layers):
raise ValueError(
f"image_embeds must have the same length as image_projection_layers, got {len(image_embeds)} and {len(self.image_projection_layers)}"
)
for image_embed, image_projection_layer in zip(image_embeds, self.image_projection_layers):
batch_size, num_images = image_embed.shape[0], image_embed.shape[1]
image_embed = image_embed.reshape((batch_size * num_images,) + image_embed.shape[2:])
image_embed = image_projection_layer(image_embed)
image_embed = image_embed.reshape((batch_size, num_images) + image_embed.shape[1:])
projected_image_embeds.append(image_embed)
return projected_image_embeds
| diffusers/src/diffusers/models/embeddings.py/0 | {
"file_path": "diffusers/src/diffusers/models/embeddings.py",
"repo_id": "diffusers",
"token_count": 15917
} | 108 |
# Copyright 2023 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
from typing import Optional
from torch import nn
from .transformer_2d import Transformer2DModel, Transformer2DModelOutput
class DualTransformer2DModel(nn.Module):
"""
Dual transformer wrapper that combines two `Transformer2DModel`s for mixed inference.
Parameters:
num_attention_heads (`int`, *optional*, defaults to 16): The number of heads to use for multi-head attention.
attention_head_dim (`int`, *optional*, defaults to 88): The number of channels in each head.
in_channels (`int`, *optional*):
Pass if the input is continuous. The number of channels in the input and output.
num_layers (`int`, *optional*, defaults to 1): The number of layers of Transformer blocks to use.
dropout (`float`, *optional*, defaults to 0.1): The dropout probability to use.
cross_attention_dim (`int`, *optional*): The number of encoder_hidden_states dimensions to use.
sample_size (`int`, *optional*): Pass if the input is discrete. The width of the latent images.
Note that this is fixed at training time as it is used for learning a number of position embeddings. See
`ImagePositionalEmbeddings`.
num_vector_embeds (`int`, *optional*):
Pass if the input is discrete. The number of classes of the vector embeddings of the latent pixels.
Includes the class for the masked latent pixel.
activation_fn (`str`, *optional*, defaults to `"geglu"`): Activation function to be used in feed-forward.
num_embeds_ada_norm ( `int`, *optional*): Pass if at least one of the norm_layers is `AdaLayerNorm`.
The number of diffusion steps used during training. Note that this is fixed at training time as it is used
to learn a number of embeddings that are added to the hidden states. During inference, you can denoise for
up to but not more than steps than `num_embeds_ada_norm`.
attention_bias (`bool`, *optional*):
Configure if the TransformerBlocks' attention should contain a bias parameter.
"""
def __init__(
self,
num_attention_heads: int = 16,
attention_head_dim: int = 88,
in_channels: Optional[int] = None,
num_layers: int = 1,
dropout: float = 0.0,
norm_num_groups: int = 32,
cross_attention_dim: Optional[int] = None,
attention_bias: bool = False,
sample_size: Optional[int] = None,
num_vector_embeds: Optional[int] = None,
activation_fn: str = "geglu",
num_embeds_ada_norm: Optional[int] = None,
):
super().__init__()
self.transformers = nn.ModuleList(
[
Transformer2DModel(
num_attention_heads=num_attention_heads,
attention_head_dim=attention_head_dim,
in_channels=in_channels,
num_layers=num_layers,
dropout=dropout,
norm_num_groups=norm_num_groups,
cross_attention_dim=cross_attention_dim,
attention_bias=attention_bias,
sample_size=sample_size,
num_vector_embeds=num_vector_embeds,
activation_fn=activation_fn,
num_embeds_ada_norm=num_embeds_ada_norm,
)
for _ in range(2)
]
)
# Variables that can be set by a pipeline:
# The ratio of transformer1 to transformer2's output states to be combined during inference
self.mix_ratio = 0.5
# The shape of `encoder_hidden_states` is expected to be
# `(batch_size, condition_lengths[0]+condition_lengths[1], num_features)`
self.condition_lengths = [77, 257]
# Which transformer to use to encode which condition.
# E.g. `(1, 0)` means that we'll use `transformers[1](conditions[0])` and `transformers[0](conditions[1])`
self.transformer_index_for_condition = [1, 0]
def forward(
self,
hidden_states,
encoder_hidden_states,
timestep=None,
attention_mask=None,
cross_attention_kwargs=None,
return_dict: bool = True,
):
"""
Args:
hidden_states ( When discrete, `torch.LongTensor` of shape `(batch size, num latent pixels)`.
When continuous, `torch.FloatTensor` of shape `(batch size, channel, height, width)`): Input
hidden_states.
encoder_hidden_states ( `torch.LongTensor` of shape `(batch size, encoder_hidden_states dim)`, *optional*):
Conditional embeddings for cross attention layer. If not given, cross-attention defaults to
self-attention.
timestep ( `torch.long`, *optional*):
Optional timestep to be applied as an embedding in AdaLayerNorm's. Used to indicate denoising step.
attention_mask (`torch.FloatTensor`, *optional*):
Optional attention mask to be applied in Attention.
cross_attention_kwargs (`dict`, *optional*):
A kwargs dictionary that if specified is passed along to the `AttentionProcessor` as defined under
`self.processor` in
[diffusers.models.attention_processor](https://github.com/huggingface/diffusers/blob/main/src/diffusers/models/attention_processor.py).
return_dict (`bool`, *optional*, defaults to `True`):
Whether or not to return a [`models.unets.unet_2d_condition.UNet2DConditionOutput`] instead of a plain tuple.
Returns:
[`~models.transformer_2d.Transformer2DModelOutput`] or `tuple`:
[`~models.transformer_2d.Transformer2DModelOutput`] if `return_dict` is True, otherwise a `tuple`. When
returning a tuple, the first element is the sample tensor.
"""
input_states = hidden_states
encoded_states = []
tokens_start = 0
# attention_mask is not used yet
for i in range(2):
# for each of the two transformers, pass the corresponding condition tokens
condition_state = encoder_hidden_states[:, tokens_start : tokens_start + self.condition_lengths[i]]
transformer_index = self.transformer_index_for_condition[i]
encoded_state = self.transformers[transformer_index](
input_states,
encoder_hidden_states=condition_state,
timestep=timestep,
cross_attention_kwargs=cross_attention_kwargs,
return_dict=False,
)[0]
encoded_states.append(encoded_state - input_states)
tokens_start += self.condition_lengths[i]
output_states = encoded_states[0] * self.mix_ratio + encoded_states[1] * (1 - self.mix_ratio)
output_states = output_states + input_states
if not return_dict:
return (output_states,)
return Transformer2DModelOutput(sample=output_states)
| diffusers/src/diffusers/models/transformers/dual_transformer_2d.py/0 | {
"file_path": "diffusers/src/diffusers/models/transformers/dual_transformer_2d.py",
"repo_id": "diffusers",
"token_count": 3163
} | 109 |
# Copyright 2023 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
from dataclasses import dataclass
from typing import Any, Dict, List, Optional, Tuple, Union
import torch
import torch.nn as nn
import torch.utils.checkpoint
from ...configuration_utils import ConfigMixin, register_to_config
from ...loaders import PeftAdapterMixin, UNet2DConditionLoadersMixin
from ...utils import USE_PEFT_BACKEND, BaseOutput, deprecate, logging, scale_lora_layers, unscale_lora_layers
from ..activations import get_activation
from ..attention_processor import (
ADDED_KV_ATTENTION_PROCESSORS,
CROSS_ATTENTION_PROCESSORS,
Attention,
AttentionProcessor,
AttnAddedKVProcessor,
AttnProcessor,
)
from ..embeddings import (
GaussianFourierProjection,
GLIGENTextBoundingboxProjection,
ImageHintTimeEmbedding,
ImageProjection,
ImageTimeEmbedding,
TextImageProjection,
TextImageTimeEmbedding,
TextTimeEmbedding,
TimestepEmbedding,
Timesteps,
)
from ..modeling_utils import ModelMixin
from .unet_2d_blocks import (
UNetMidBlock2D,
UNetMidBlock2DCrossAttn,
UNetMidBlock2DSimpleCrossAttn,
get_down_block,
get_up_block,
)
logger = logging.get_logger(__name__) # pylint: disable=invalid-name
@dataclass
class UNet2DConditionOutput(BaseOutput):
"""
The output of [`UNet2DConditionModel`].
Args:
sample (`torch.FloatTensor` of shape `(batch_size, num_channels, height, width)`):
The hidden states output conditioned on `encoder_hidden_states` input. Output of last layer of model.
"""
sample: torch.FloatTensor = None
class UNet2DConditionModel(ModelMixin, ConfigMixin, UNet2DConditionLoadersMixin, PeftAdapterMixin):
r"""
A conditional 2D UNet model that takes a noisy sample, conditional state, and a timestep and returns a sample
shaped output.
This model inherits from [`ModelMixin`]. Check the superclass documentation for it's generic methods implemented
for all models (such as downloading or saving).
Parameters:
sample_size (`int` or `Tuple[int, int]`, *optional*, defaults to `None`):
Height and width of input/output sample.
in_channels (`int`, *optional*, defaults to 4): Number of channels in the input sample.
out_channels (`int`, *optional*, defaults to 4): Number of channels in the output.
center_input_sample (`bool`, *optional*, defaults to `False`): Whether to center the input sample.
flip_sin_to_cos (`bool`, *optional*, defaults to `False`):
Whether to flip the sin to cos in the time embedding.
freq_shift (`int`, *optional*, defaults to 0): The frequency shift to apply to the time embedding.
down_block_types (`Tuple[str]`, *optional*, defaults to `("CrossAttnDownBlock2D", "CrossAttnDownBlock2D", "CrossAttnDownBlock2D", "DownBlock2D")`):
The tuple of downsample blocks to use.
mid_block_type (`str`, *optional*, defaults to `"UNetMidBlock2DCrossAttn"`):
Block type for middle of UNet, it can be one of `UNetMidBlock2DCrossAttn`, `UNetMidBlock2D`, or
`UNetMidBlock2DSimpleCrossAttn`. If `None`, the mid block layer is skipped.
up_block_types (`Tuple[str]`, *optional*, defaults to `("UpBlock2D", "CrossAttnUpBlock2D", "CrossAttnUpBlock2D", "CrossAttnUpBlock2D")`):
The tuple of upsample blocks to use.
only_cross_attention(`bool` or `Tuple[bool]`, *optional*, default to `False`):
Whether to include self-attention in the basic transformer blocks, see
[`~models.attention.BasicTransformerBlock`].
block_out_channels (`Tuple[int]`, *optional*, defaults to `(320, 640, 1280, 1280)`):
The tuple of output channels for each block.
layers_per_block (`int`, *optional*, defaults to 2): The number of layers per block.
downsample_padding (`int`, *optional*, defaults to 1): The padding to use for the downsampling convolution.
mid_block_scale_factor (`float`, *optional*, defaults to 1.0): The scale factor to use for the mid block.
dropout (`float`, *optional*, defaults to 0.0): The dropout probability to use.
act_fn (`str`, *optional*, defaults to `"silu"`): The activation function to use.
norm_num_groups (`int`, *optional*, defaults to 32): The number of groups to use for the normalization.
If `None`, normalization and activation layers is skipped in post-processing.
norm_eps (`float`, *optional*, defaults to 1e-5): The epsilon to use for the normalization.
cross_attention_dim (`int` or `Tuple[int]`, *optional*, defaults to 1280):
The dimension of the cross attention features.
transformer_layers_per_block (`int`, `Tuple[int]`, or `Tuple[Tuple]` , *optional*, defaults to 1):
The number of transformer blocks of type [`~models.attention.BasicTransformerBlock`]. Only relevant for
[`~models.unet_2d_blocks.CrossAttnDownBlock2D`], [`~models.unet_2d_blocks.CrossAttnUpBlock2D`],
[`~models.unet_2d_blocks.UNetMidBlock2DCrossAttn`].
reverse_transformer_layers_per_block : (`Tuple[Tuple]`, *optional*, defaults to None):
The number of transformer blocks of type [`~models.attention.BasicTransformerBlock`], in the upsampling
blocks of the U-Net. Only relevant if `transformer_layers_per_block` is of type `Tuple[Tuple]` and for
[`~models.unet_2d_blocks.CrossAttnDownBlock2D`], [`~models.unet_2d_blocks.CrossAttnUpBlock2D`],
[`~models.unet_2d_blocks.UNetMidBlock2DCrossAttn`].
encoder_hid_dim (`int`, *optional*, defaults to None):
If `encoder_hid_dim_type` is defined, `encoder_hidden_states` will be projected from `encoder_hid_dim`
dimension to `cross_attention_dim`.
encoder_hid_dim_type (`str`, *optional*, defaults to `None`):
If given, the `encoder_hidden_states` and potentially other embeddings are down-projected to text
embeddings of dimension `cross_attention` according to `encoder_hid_dim_type`.
attention_head_dim (`int`, *optional*, defaults to 8): The dimension of the attention heads.
num_attention_heads (`int`, *optional*):
The number of attention heads. If not defined, defaults to `attention_head_dim`
resnet_time_scale_shift (`str`, *optional*, defaults to `"default"`): Time scale shift config
for ResNet blocks (see [`~models.resnet.ResnetBlock2D`]). Choose from `default` or `scale_shift`.
class_embed_type (`str`, *optional*, defaults to `None`):
The type of class embedding to use which is ultimately summed with the time embeddings. Choose from `None`,
`"timestep"`, `"identity"`, `"projection"`, or `"simple_projection"`.
addition_embed_type (`str`, *optional*, defaults to `None`):
Configures an optional embedding which will be summed with the time embeddings. Choose from `None` or
"text". "text" will use the `TextTimeEmbedding` layer.
addition_time_embed_dim: (`int`, *optional*, defaults to `None`):
Dimension for the timestep embeddings.
num_class_embeds (`int`, *optional*, defaults to `None`):
Input dimension of the learnable embedding matrix to be projected to `time_embed_dim`, when performing
class conditioning with `class_embed_type` equal to `None`.
time_embedding_type (`str`, *optional*, defaults to `positional`):
The type of position embedding to use for timesteps. Choose from `positional` or `fourier`.
time_embedding_dim (`int`, *optional*, defaults to `None`):
An optional override for the dimension of the projected time embedding.
time_embedding_act_fn (`str`, *optional*, defaults to `None`):
Optional activation function to use only once on the time embeddings before they are passed to the rest of
the UNet. Choose from `silu`, `mish`, `gelu`, and `swish`.
timestep_post_act (`str`, *optional*, defaults to `None`):
The second activation function to use in timestep embedding. Choose from `silu`, `mish` and `gelu`.
time_cond_proj_dim (`int`, *optional*, defaults to `None`):
The dimension of `cond_proj` layer in the timestep embedding.
conv_in_kernel (`int`, *optional*, default to `3`): The kernel size of `conv_in` layer. conv_out_kernel (`int`,
*optional*, default to `3`): The kernel size of `conv_out` layer. projection_class_embeddings_input_dim (`int`,
*optional*): The dimension of the `class_labels` input when
`class_embed_type="projection"`. Required when `class_embed_type="projection"`.
class_embeddings_concat (`bool`, *optional*, defaults to `False`): Whether to concatenate the time
embeddings with the class embeddings.
mid_block_only_cross_attention (`bool`, *optional*, defaults to `None`):
Whether to use cross attention with the mid block when using the `UNetMidBlock2DSimpleCrossAttn`. If
`only_cross_attention` is given as a single boolean and `mid_block_only_cross_attention` is `None`, the
`only_cross_attention` value is used as the value for `mid_block_only_cross_attention`. Default to `False`
otherwise.
"""
_supports_gradient_checkpointing = True
@register_to_config
def __init__(
self,
sample_size: Optional[int] = None,
in_channels: int = 4,
out_channels: int = 4,
center_input_sample: bool = False,
flip_sin_to_cos: bool = True,
freq_shift: int = 0,
down_block_types: Tuple[str] = (
"CrossAttnDownBlock2D",
"CrossAttnDownBlock2D",
"CrossAttnDownBlock2D",
"DownBlock2D",
),
mid_block_type: Optional[str] = "UNetMidBlock2DCrossAttn",
up_block_types: Tuple[str] = ("UpBlock2D", "CrossAttnUpBlock2D", "CrossAttnUpBlock2D", "CrossAttnUpBlock2D"),
only_cross_attention: Union[bool, Tuple[bool]] = False,
block_out_channels: Tuple[int] = (320, 640, 1280, 1280),
layers_per_block: Union[int, Tuple[int]] = 2,
downsample_padding: int = 1,
mid_block_scale_factor: float = 1,
dropout: float = 0.0,
act_fn: str = "silu",
norm_num_groups: Optional[int] = 32,
norm_eps: float = 1e-5,
cross_attention_dim: Union[int, Tuple[int]] = 1280,
transformer_layers_per_block: Union[int, Tuple[int], Tuple[Tuple]] = 1,
reverse_transformer_layers_per_block: Optional[Tuple[Tuple[int]]] = None,
encoder_hid_dim: Optional[int] = None,
encoder_hid_dim_type: Optional[str] = None,
attention_head_dim: Union[int, Tuple[int]] = 8,
num_attention_heads: Optional[Union[int, Tuple[int]]] = None,
dual_cross_attention: bool = False,
use_linear_projection: bool = False,
class_embed_type: Optional[str] = None,
addition_embed_type: Optional[str] = None,
addition_time_embed_dim: Optional[int] = None,
num_class_embeds: Optional[int] = None,
upcast_attention: bool = False,
resnet_time_scale_shift: str = "default",
resnet_skip_time_act: bool = False,
resnet_out_scale_factor: int = 1.0,
time_embedding_type: str = "positional",
time_embedding_dim: Optional[int] = None,
time_embedding_act_fn: Optional[str] = None,
timestep_post_act: Optional[str] = None,
time_cond_proj_dim: Optional[int] = None,
conv_in_kernel: int = 3,
conv_out_kernel: int = 3,
projection_class_embeddings_input_dim: Optional[int] = None,
attention_type: str = "default",
class_embeddings_concat: bool = False,
mid_block_only_cross_attention: Optional[bool] = None,
cross_attention_norm: Optional[str] = None,
addition_embed_type_num_heads=64,
):
super().__init__()
self.sample_size = sample_size
if num_attention_heads is not None:
raise ValueError(
"At the moment it is not possible to define the number of attention heads via `num_attention_heads` because of a naming issue as described in https://github.com/huggingface/diffusers/issues/2011#issuecomment-1547958131. Passing `num_attention_heads` will only be supported in diffusers v0.19."
)
# If `num_attention_heads` is not defined (which is the case for most models)
# it will default to `attention_head_dim`. This looks weird upon first reading it and it is.
# The reason for this behavior is to correct for incorrectly named variables that were introduced
# when this library was created. The incorrect naming was only discovered much later in https://github.com/huggingface/diffusers/issues/2011#issuecomment-1547958131
# Changing `attention_head_dim` to `num_attention_heads` for 40,000+ configurations is too backwards breaking
# which is why we correct for the naming here.
num_attention_heads = num_attention_heads or attention_head_dim
# Check inputs
if len(down_block_types) != len(up_block_types):
raise ValueError(
f"Must provide the same number of `down_block_types` as `up_block_types`. `down_block_types`: {down_block_types}. `up_block_types`: {up_block_types}."
)
if len(block_out_channels) != len(down_block_types):
raise ValueError(
f"Must provide the same number of `block_out_channels` as `down_block_types`. `block_out_channels`: {block_out_channels}. `down_block_types`: {down_block_types}."
)
if not isinstance(only_cross_attention, bool) and len(only_cross_attention) != len(down_block_types):
raise ValueError(
f"Must provide the same number of `only_cross_attention` as `down_block_types`. `only_cross_attention`: {only_cross_attention}. `down_block_types`: {down_block_types}."
)
if not isinstance(num_attention_heads, int) and len(num_attention_heads) != len(down_block_types):
raise ValueError(
f"Must provide the same number of `num_attention_heads` as `down_block_types`. `num_attention_heads`: {num_attention_heads}. `down_block_types`: {down_block_types}."
)
if not isinstance(attention_head_dim, int) and len(attention_head_dim) != len(down_block_types):
raise ValueError(
f"Must provide the same number of `attention_head_dim` as `down_block_types`. `attention_head_dim`: {attention_head_dim}. `down_block_types`: {down_block_types}."
)
if isinstance(cross_attention_dim, list) and len(cross_attention_dim) != len(down_block_types):
raise ValueError(
f"Must provide the same number of `cross_attention_dim` as `down_block_types`. `cross_attention_dim`: {cross_attention_dim}. `down_block_types`: {down_block_types}."
)
if not isinstance(layers_per_block, int) and len(layers_per_block) != len(down_block_types):
raise ValueError(
f"Must provide the same number of `layers_per_block` as `down_block_types`. `layers_per_block`: {layers_per_block}. `down_block_types`: {down_block_types}."
)
if isinstance(transformer_layers_per_block, list) and reverse_transformer_layers_per_block is None:
for layer_number_per_block in transformer_layers_per_block:
if isinstance(layer_number_per_block, list):
raise ValueError("Must provide 'reverse_transformer_layers_per_block` if using asymmetrical UNet.")
# input
conv_in_padding = (conv_in_kernel - 1) // 2
self.conv_in = nn.Conv2d(
in_channels, block_out_channels[0], kernel_size=conv_in_kernel, padding=conv_in_padding
)
# time
if time_embedding_type == "fourier":
time_embed_dim = time_embedding_dim or block_out_channels[0] * 2
if time_embed_dim % 2 != 0:
raise ValueError(f"`time_embed_dim` should be divisible by 2, but is {time_embed_dim}.")
self.time_proj = GaussianFourierProjection(
time_embed_dim // 2, set_W_to_weight=False, log=False, flip_sin_to_cos=flip_sin_to_cos
)
timestep_input_dim = time_embed_dim
elif time_embedding_type == "positional":
time_embed_dim = time_embedding_dim or block_out_channels[0] * 4
self.time_proj = Timesteps(block_out_channels[0], flip_sin_to_cos, freq_shift)
timestep_input_dim = block_out_channels[0]
else:
raise ValueError(
f"{time_embedding_type} does not exist. Please make sure to use one of `fourier` or `positional`."
)
self.time_embedding = TimestepEmbedding(
timestep_input_dim,
time_embed_dim,
act_fn=act_fn,
post_act_fn=timestep_post_act,
cond_proj_dim=time_cond_proj_dim,
)
if encoder_hid_dim_type is None and encoder_hid_dim is not None:
encoder_hid_dim_type = "text_proj"
self.register_to_config(encoder_hid_dim_type=encoder_hid_dim_type)
logger.info("encoder_hid_dim_type defaults to 'text_proj' as `encoder_hid_dim` is defined.")
if encoder_hid_dim is None and encoder_hid_dim_type is not None:
raise ValueError(
f"`encoder_hid_dim` has to be defined when `encoder_hid_dim_type` is set to {encoder_hid_dim_type}."
)
if encoder_hid_dim_type == "text_proj":
self.encoder_hid_proj = nn.Linear(encoder_hid_dim, cross_attention_dim)
elif encoder_hid_dim_type == "text_image_proj":
# image_embed_dim DOESN'T have to be `cross_attention_dim`. To not clutter the __init__ too much
# they are set to `cross_attention_dim` here as this is exactly the required dimension for the currently only use
# case when `addition_embed_type == "text_image_proj"` (Kadinsky 2.1)`
self.encoder_hid_proj = TextImageProjection(
text_embed_dim=encoder_hid_dim,
image_embed_dim=cross_attention_dim,
cross_attention_dim=cross_attention_dim,
)
elif encoder_hid_dim_type == "image_proj":
# Kandinsky 2.2
self.encoder_hid_proj = ImageProjection(
image_embed_dim=encoder_hid_dim,
cross_attention_dim=cross_attention_dim,
)
elif encoder_hid_dim_type is not None:
raise ValueError(
f"encoder_hid_dim_type: {encoder_hid_dim_type} must be None, 'text_proj' or 'text_image_proj'."
)
else:
self.encoder_hid_proj = None
# class embedding
if class_embed_type is None and num_class_embeds is not None:
self.class_embedding = nn.Embedding(num_class_embeds, time_embed_dim)
elif class_embed_type == "timestep":
self.class_embedding = TimestepEmbedding(timestep_input_dim, time_embed_dim, act_fn=act_fn)
elif class_embed_type == "identity":
self.class_embedding = nn.Identity(time_embed_dim, time_embed_dim)
elif class_embed_type == "projection":
if projection_class_embeddings_input_dim is None:
raise ValueError(
"`class_embed_type`: 'projection' requires `projection_class_embeddings_input_dim` be set"
)
# The projection `class_embed_type` is the same as the timestep `class_embed_type` except
# 1. the `class_labels` inputs are not first converted to sinusoidal embeddings
# 2. it projects from an arbitrary input dimension.
#
# Note that `TimestepEmbedding` is quite general, being mainly linear layers and activations.
# When used for embedding actual timesteps, the timesteps are first converted to sinusoidal embeddings.
# As a result, `TimestepEmbedding` can be passed arbitrary vectors.
self.class_embedding = TimestepEmbedding(projection_class_embeddings_input_dim, time_embed_dim)
elif class_embed_type == "simple_projection":
if projection_class_embeddings_input_dim is None:
raise ValueError(
"`class_embed_type`: 'simple_projection' requires `projection_class_embeddings_input_dim` be set"
)
self.class_embedding = nn.Linear(projection_class_embeddings_input_dim, time_embed_dim)
else:
self.class_embedding = None
if addition_embed_type == "text":
if encoder_hid_dim is not None:
text_time_embedding_from_dim = encoder_hid_dim
else:
text_time_embedding_from_dim = cross_attention_dim
self.add_embedding = TextTimeEmbedding(
text_time_embedding_from_dim, time_embed_dim, num_heads=addition_embed_type_num_heads
)
elif addition_embed_type == "text_image":
# text_embed_dim and image_embed_dim DON'T have to be `cross_attention_dim`. To not clutter the __init__ too much
# they are set to `cross_attention_dim` here as this is exactly the required dimension for the currently only use
# case when `addition_embed_type == "text_image"` (Kadinsky 2.1)`
self.add_embedding = TextImageTimeEmbedding(
text_embed_dim=cross_attention_dim, image_embed_dim=cross_attention_dim, time_embed_dim=time_embed_dim
)
elif addition_embed_type == "text_time":
self.add_time_proj = Timesteps(addition_time_embed_dim, flip_sin_to_cos, freq_shift)
self.add_embedding = TimestepEmbedding(projection_class_embeddings_input_dim, time_embed_dim)
elif addition_embed_type == "image":
# Kandinsky 2.2
self.add_embedding = ImageTimeEmbedding(image_embed_dim=encoder_hid_dim, time_embed_dim=time_embed_dim)
elif addition_embed_type == "image_hint":
# Kandinsky 2.2 ControlNet
self.add_embedding = ImageHintTimeEmbedding(image_embed_dim=encoder_hid_dim, time_embed_dim=time_embed_dim)
elif addition_embed_type is not None:
raise ValueError(f"addition_embed_type: {addition_embed_type} must be None, 'text' or 'text_image'.")
if time_embedding_act_fn is None:
self.time_embed_act = None
else:
self.time_embed_act = get_activation(time_embedding_act_fn)
self.down_blocks = nn.ModuleList([])
self.up_blocks = nn.ModuleList([])
if isinstance(only_cross_attention, bool):
if mid_block_only_cross_attention is None:
mid_block_only_cross_attention = only_cross_attention
only_cross_attention = [only_cross_attention] * len(down_block_types)
if mid_block_only_cross_attention is None:
mid_block_only_cross_attention = False
if isinstance(num_attention_heads, int):
num_attention_heads = (num_attention_heads,) * len(down_block_types)
if isinstance(attention_head_dim, int):
attention_head_dim = (attention_head_dim,) * len(down_block_types)
if isinstance(cross_attention_dim, int):
cross_attention_dim = (cross_attention_dim,) * len(down_block_types)
if isinstance(layers_per_block, int):
layers_per_block = [layers_per_block] * len(down_block_types)
if isinstance(transformer_layers_per_block, int):
transformer_layers_per_block = [transformer_layers_per_block] * len(down_block_types)
if class_embeddings_concat:
# The time embeddings are concatenated with the class embeddings. The dimension of the
# time embeddings passed to the down, middle, and up blocks is twice the dimension of the
# regular time embeddings
blocks_time_embed_dim = time_embed_dim * 2
else:
blocks_time_embed_dim = time_embed_dim
# down
output_channel = block_out_channels[0]
for i, down_block_type in enumerate(down_block_types):
input_channel = output_channel
output_channel = block_out_channels[i]
is_final_block = i == len(block_out_channels) - 1
down_block = get_down_block(
down_block_type,
num_layers=layers_per_block[i],
transformer_layers_per_block=transformer_layers_per_block[i],
in_channels=input_channel,
out_channels=output_channel,
temb_channels=blocks_time_embed_dim,
add_downsample=not is_final_block,
resnet_eps=norm_eps,
resnet_act_fn=act_fn,
resnet_groups=norm_num_groups,
cross_attention_dim=cross_attention_dim[i],
num_attention_heads=num_attention_heads[i],
downsample_padding=downsample_padding,
dual_cross_attention=dual_cross_attention,
use_linear_projection=use_linear_projection,
only_cross_attention=only_cross_attention[i],
upcast_attention=upcast_attention,
resnet_time_scale_shift=resnet_time_scale_shift,
attention_type=attention_type,
resnet_skip_time_act=resnet_skip_time_act,
resnet_out_scale_factor=resnet_out_scale_factor,
cross_attention_norm=cross_attention_norm,
attention_head_dim=attention_head_dim[i] if attention_head_dim[i] is not None else output_channel,
dropout=dropout,
)
self.down_blocks.append(down_block)
# mid
if mid_block_type == "UNetMidBlock2DCrossAttn":
self.mid_block = UNetMidBlock2DCrossAttn(
transformer_layers_per_block=transformer_layers_per_block[-1],
in_channels=block_out_channels[-1],
temb_channels=blocks_time_embed_dim,
dropout=dropout,
resnet_eps=norm_eps,
resnet_act_fn=act_fn,
output_scale_factor=mid_block_scale_factor,
resnet_time_scale_shift=resnet_time_scale_shift,
cross_attention_dim=cross_attention_dim[-1],
num_attention_heads=num_attention_heads[-1],
resnet_groups=norm_num_groups,
dual_cross_attention=dual_cross_attention,
use_linear_projection=use_linear_projection,
upcast_attention=upcast_attention,
attention_type=attention_type,
)
elif mid_block_type == "UNetMidBlock2DSimpleCrossAttn":
self.mid_block = UNetMidBlock2DSimpleCrossAttn(
in_channels=block_out_channels[-1],
temb_channels=blocks_time_embed_dim,
dropout=dropout,
resnet_eps=norm_eps,
resnet_act_fn=act_fn,
output_scale_factor=mid_block_scale_factor,
cross_attention_dim=cross_attention_dim[-1],
attention_head_dim=attention_head_dim[-1],
resnet_groups=norm_num_groups,
resnet_time_scale_shift=resnet_time_scale_shift,
skip_time_act=resnet_skip_time_act,
only_cross_attention=mid_block_only_cross_attention,
cross_attention_norm=cross_attention_norm,
)
elif mid_block_type == "UNetMidBlock2D":
self.mid_block = UNetMidBlock2D(
in_channels=block_out_channels[-1],
temb_channels=blocks_time_embed_dim,
dropout=dropout,
num_layers=0,
resnet_eps=norm_eps,
resnet_act_fn=act_fn,
output_scale_factor=mid_block_scale_factor,
resnet_groups=norm_num_groups,
resnet_time_scale_shift=resnet_time_scale_shift,
add_attention=False,
)
elif mid_block_type is None:
self.mid_block = None
else:
raise ValueError(f"unknown mid_block_type : {mid_block_type}")
# count how many layers upsample the images
self.num_upsamplers = 0
# up
reversed_block_out_channels = list(reversed(block_out_channels))
reversed_num_attention_heads = list(reversed(num_attention_heads))
reversed_layers_per_block = list(reversed(layers_per_block))
reversed_cross_attention_dim = list(reversed(cross_attention_dim))
reversed_transformer_layers_per_block = (
list(reversed(transformer_layers_per_block))
if reverse_transformer_layers_per_block is None
else reverse_transformer_layers_per_block
)
only_cross_attention = list(reversed(only_cross_attention))
output_channel = reversed_block_out_channels[0]
for i, up_block_type in enumerate(up_block_types):
is_final_block = i == len(block_out_channels) - 1
prev_output_channel = output_channel
output_channel = reversed_block_out_channels[i]
input_channel = reversed_block_out_channels[min(i + 1, len(block_out_channels) - 1)]
# add upsample block for all BUT final layer
if not is_final_block:
add_upsample = True
self.num_upsamplers += 1
else:
add_upsample = False
up_block = get_up_block(
up_block_type,
num_layers=reversed_layers_per_block[i] + 1,
transformer_layers_per_block=reversed_transformer_layers_per_block[i],
in_channels=input_channel,
out_channels=output_channel,
prev_output_channel=prev_output_channel,
temb_channels=blocks_time_embed_dim,
add_upsample=add_upsample,
resnet_eps=norm_eps,
resnet_act_fn=act_fn,
resolution_idx=i,
resnet_groups=norm_num_groups,
cross_attention_dim=reversed_cross_attention_dim[i],
num_attention_heads=reversed_num_attention_heads[i],
dual_cross_attention=dual_cross_attention,
use_linear_projection=use_linear_projection,
only_cross_attention=only_cross_attention[i],
upcast_attention=upcast_attention,
resnet_time_scale_shift=resnet_time_scale_shift,
attention_type=attention_type,
resnet_skip_time_act=resnet_skip_time_act,
resnet_out_scale_factor=resnet_out_scale_factor,
cross_attention_norm=cross_attention_norm,
attention_head_dim=attention_head_dim[i] if attention_head_dim[i] is not None else output_channel,
dropout=dropout,
)
self.up_blocks.append(up_block)
prev_output_channel = output_channel
# out
if norm_num_groups is not None:
self.conv_norm_out = nn.GroupNorm(
num_channels=block_out_channels[0], num_groups=norm_num_groups, eps=norm_eps
)
self.conv_act = get_activation(act_fn)
else:
self.conv_norm_out = None
self.conv_act = None
conv_out_padding = (conv_out_kernel - 1) // 2
self.conv_out = nn.Conv2d(
block_out_channels[0], out_channels, kernel_size=conv_out_kernel, padding=conv_out_padding
)
if attention_type in ["gated", "gated-text-image"]:
positive_len = 768
if isinstance(cross_attention_dim, int):
positive_len = cross_attention_dim
elif isinstance(cross_attention_dim, tuple) or isinstance(cross_attention_dim, list):
positive_len = cross_attention_dim[0]
feature_type = "text-only" if attention_type == "gated" else "text-image"
self.position_net = GLIGENTextBoundingboxProjection(
positive_len=positive_len, out_dim=cross_attention_dim, feature_type=feature_type
)
@property
def attn_processors(self) -> Dict[str, AttentionProcessor]:
r"""
Returns:
`dict` of attention processors: A dictionary containing all attention processors used in the model with
indexed by its weight name.
"""
# set recursively
processors = {}
def fn_recursive_add_processors(name: str, module: torch.nn.Module, processors: Dict[str, AttentionProcessor]):
if hasattr(module, "get_processor"):
processors[f"{name}.processor"] = module.get_processor(return_deprecated_lora=True)
for sub_name, child in module.named_children():
fn_recursive_add_processors(f"{name}.{sub_name}", child, processors)
return processors
for name, module in self.named_children():
fn_recursive_add_processors(name, module, processors)
return processors
def set_attn_processor(self, processor: Union[AttentionProcessor, Dict[str, AttentionProcessor]]):
r"""
Sets the attention processor to use to compute attention.
Parameters:
processor (`dict` of `AttentionProcessor` or only `AttentionProcessor`):
The instantiated processor class or a dictionary of processor classes that will be set as the processor
for **all** `Attention` layers.
If `processor` is a dict, the key needs to define the path to the corresponding cross attention
processor. This is strongly recommended when setting trainable attention processors.
"""
count = len(self.attn_processors.keys())
if isinstance(processor, dict) and len(processor) != count:
raise ValueError(
f"A dict of processors was passed, but the number of processors {len(processor)} does not match the"
f" number of attention layers: {count}. Please make sure to pass {count} processor classes."
)
def fn_recursive_attn_processor(name: str, module: torch.nn.Module, processor):
if hasattr(module, "set_processor"):
if not isinstance(processor, dict):
module.set_processor(processor)
else:
module.set_processor(processor.pop(f"{name}.processor"))
for sub_name, child in module.named_children():
fn_recursive_attn_processor(f"{name}.{sub_name}", child, processor)
for name, module in self.named_children():
fn_recursive_attn_processor(name, module, processor)
def set_default_attn_processor(self):
"""
Disables custom attention processors and sets the default attention implementation.
"""
if all(proc.__class__ in ADDED_KV_ATTENTION_PROCESSORS for proc in self.attn_processors.values()):
processor = AttnAddedKVProcessor()
elif all(proc.__class__ in CROSS_ATTENTION_PROCESSORS for proc in self.attn_processors.values()):
processor = AttnProcessor()
else:
raise ValueError(
f"Cannot call `set_default_attn_processor` when attention processors are of type {next(iter(self.attn_processors.values()))}"
)
self.set_attn_processor(processor)
def set_attention_slice(self, slice_size):
r"""
Enable sliced attention computation.
When this option is enabled, the attention module splits the input tensor in slices to compute attention in
several steps. This is useful for saving some memory in exchange for a small decrease in speed.
Args:
slice_size (`str` or `int` or `list(int)`, *optional*, defaults to `"auto"`):
When `"auto"`, input to the attention heads is halved, so attention is computed in two steps. If
`"max"`, maximum amount of memory is saved by running only one slice at a time. If a number is
provided, uses as many slices as `attention_head_dim // slice_size`. In this case, `attention_head_dim`
must be a multiple of `slice_size`.
"""
sliceable_head_dims = []
def fn_recursive_retrieve_sliceable_dims(module: torch.nn.Module):
if hasattr(module, "set_attention_slice"):
sliceable_head_dims.append(module.sliceable_head_dim)
for child in module.children():
fn_recursive_retrieve_sliceable_dims(child)
# retrieve number of attention layers
for module in self.children():
fn_recursive_retrieve_sliceable_dims(module)
num_sliceable_layers = len(sliceable_head_dims)
if slice_size == "auto":
# half the attention head size is usually a good trade-off between
# speed and memory
slice_size = [dim // 2 for dim in sliceable_head_dims]
elif slice_size == "max":
# make smallest slice possible
slice_size = num_sliceable_layers * [1]
slice_size = num_sliceable_layers * [slice_size] if not isinstance(slice_size, list) else slice_size
if len(slice_size) != len(sliceable_head_dims):
raise ValueError(
f"You have provided {len(slice_size)}, but {self.config} has {len(sliceable_head_dims)} different"
f" attention layers. Make sure to match `len(slice_size)` to be {len(sliceable_head_dims)}."
)
for i in range(len(slice_size)):
size = slice_size[i]
dim = sliceable_head_dims[i]
if size is not None and size > dim:
raise ValueError(f"size {size} has to be smaller or equal to {dim}.")
# Recursively walk through all the children.
# Any children which exposes the set_attention_slice method
# gets the message
def fn_recursive_set_attention_slice(module: torch.nn.Module, slice_size: List[int]):
if hasattr(module, "set_attention_slice"):
module.set_attention_slice(slice_size.pop())
for child in module.children():
fn_recursive_set_attention_slice(child, slice_size)
reversed_slice_size = list(reversed(slice_size))
for module in self.children():
fn_recursive_set_attention_slice(module, reversed_slice_size)
def _set_gradient_checkpointing(self, module, value=False):
if hasattr(module, "gradient_checkpointing"):
module.gradient_checkpointing = value
def enable_freeu(self, s1, s2, b1, b2):
r"""Enables the FreeU mechanism from https://arxiv.org/abs/2309.11497.
The suffixes after the scaling factors represent the stage blocks where they are being applied.
Please refer to the [official repository](https://github.com/ChenyangSi/FreeU) for combinations of values that
are known to work well for different pipelines such as Stable Diffusion v1, v2, and Stable Diffusion XL.
Args:
s1 (`float`):
Scaling factor for stage 1 to attenuate the contributions of the skip features. This is done to
mitigate the "oversmoothing effect" in the enhanced denoising process.
s2 (`float`):
Scaling factor for stage 2 to attenuate the contributions of the skip features. This is done to
mitigate the "oversmoothing effect" in the enhanced denoising process.
b1 (`float`): Scaling factor for stage 1 to amplify the contributions of backbone features.
b2 (`float`): Scaling factor for stage 2 to amplify the contributions of backbone features.
"""
for i, upsample_block in enumerate(self.up_blocks):
setattr(upsample_block, "s1", s1)
setattr(upsample_block, "s2", s2)
setattr(upsample_block, "b1", b1)
setattr(upsample_block, "b2", b2)
def disable_freeu(self):
"""Disables the FreeU mechanism."""
freeu_keys = {"s1", "s2", "b1", "b2"}
for i, upsample_block in enumerate(self.up_blocks):
for k in freeu_keys:
if hasattr(upsample_block, k) or getattr(upsample_block, k, None) is not None:
setattr(upsample_block, k, None)
def fuse_qkv_projections(self):
"""
Enables fused QKV projections. For self-attention modules, all projection matrices (i.e., query,
key, value) are fused. For cross-attention modules, key and value projection matrices are fused.
<Tip warning={true}>
This API is 🧪 experimental.
</Tip>
"""
self.original_attn_processors = None
for _, attn_processor in self.attn_processors.items():
if "Added" in str(attn_processor.__class__.__name__):
raise ValueError("`fuse_qkv_projections()` is not supported for models having added KV projections.")
self.original_attn_processors = self.attn_processors
for module in self.modules():
if isinstance(module, Attention):
module.fuse_projections(fuse=True)
def unfuse_qkv_projections(self):
"""Disables the fused QKV projection if enabled.
<Tip warning={true}>
This API is 🧪 experimental.
</Tip>
"""
if self.original_attn_processors is not None:
self.set_attn_processor(self.original_attn_processors)
def unload_lora(self):
"""Unloads LoRA weights."""
deprecate(
"unload_lora",
"0.28.0",
"Calling `unload_lora()` is deprecated and will be removed in a future version. Please install `peft` and then call `disable_adapters().",
)
for module in self.modules():
if hasattr(module, "set_lora_layer"):
module.set_lora_layer(None)
def forward(
self,
sample: torch.FloatTensor,
timestep: Union[torch.Tensor, float, int],
encoder_hidden_states: torch.Tensor,
class_labels: Optional[torch.Tensor] = None,
timestep_cond: Optional[torch.Tensor] = None,
attention_mask: Optional[torch.Tensor] = None,
cross_attention_kwargs: Optional[Dict[str, Any]] = None,
added_cond_kwargs: Optional[Dict[str, torch.Tensor]] = None,
down_block_additional_residuals: Optional[Tuple[torch.Tensor]] = None,
mid_block_additional_residual: Optional[torch.Tensor] = None,
down_intrablock_additional_residuals: Optional[Tuple[torch.Tensor]] = None,
encoder_attention_mask: Optional[torch.Tensor] = None,
return_dict: bool = True,
) -> Union[UNet2DConditionOutput, Tuple]:
r"""
The [`UNet2DConditionModel`] forward method.
Args:
sample (`torch.FloatTensor`):
The noisy input tensor with the following shape `(batch, channel, height, width)`.
timestep (`torch.FloatTensor` or `float` or `int`): The number of timesteps to denoise an input.
encoder_hidden_states (`torch.FloatTensor`):
The encoder hidden states with shape `(batch, sequence_length, feature_dim)`.
class_labels (`torch.Tensor`, *optional*, defaults to `None`):
Optional class labels for conditioning. Their embeddings will be summed with the timestep embeddings.
timestep_cond: (`torch.Tensor`, *optional*, defaults to `None`):
Conditional embeddings for timestep. If provided, the embeddings will be summed with the samples passed
through the `self.time_embedding` layer to obtain the timestep embeddings.
attention_mask (`torch.Tensor`, *optional*, defaults to `None`):
An attention mask of shape `(batch, key_tokens)` is applied to `encoder_hidden_states`. If `1` the mask
is kept, otherwise if `0` it is discarded. Mask will be converted into a bias, which adds large
negative values to the attention scores corresponding to "discard" tokens.
cross_attention_kwargs (`dict`, *optional*):
A kwargs dictionary that if specified is passed along to the `AttentionProcessor` as defined under
`self.processor` in
[diffusers.models.attention_processor](https://github.com/huggingface/diffusers/blob/main/src/diffusers/models/attention_processor.py).
added_cond_kwargs: (`dict`, *optional*):
A kwargs dictionary containing additional embeddings that if specified are added to the embeddings that
are passed along to the UNet blocks.
down_block_additional_residuals: (`tuple` of `torch.Tensor`, *optional*):
A tuple of tensors that if specified are added to the residuals of down unet blocks.
mid_block_additional_residual: (`torch.Tensor`, *optional*):
A tensor that if specified is added to the residual of the middle unet block.
encoder_attention_mask (`torch.Tensor`):
A cross-attention mask of shape `(batch, sequence_length)` is applied to `encoder_hidden_states`. If
`True` the mask is kept, otherwise if `False` it is discarded. Mask will be converted into a bias,
which adds large negative values to the attention scores corresponding to "discard" tokens.
return_dict (`bool`, *optional*, defaults to `True`):
Whether or not to return a [`~models.unets.unet_2d_condition.UNet2DConditionOutput`] instead of a plain
tuple.
cross_attention_kwargs (`dict`, *optional*):
A kwargs dictionary that if specified is passed along to the [`AttnProcessor`].
added_cond_kwargs: (`dict`, *optional*):
A kwargs dictionary containin additional embeddings that if specified are added to the embeddings that
are passed along to the UNet blocks.
down_block_additional_residuals (`tuple` of `torch.Tensor`, *optional*):
additional residuals to be added to UNet long skip connections from down blocks to up blocks for
example from ControlNet side model(s)
mid_block_additional_residual (`torch.Tensor`, *optional*):
additional residual to be added to UNet mid block output, for example from ControlNet side model
down_intrablock_additional_residuals (`tuple` of `torch.Tensor`, *optional*):
additional residuals to be added within UNet down blocks, for example from T2I-Adapter side model(s)
Returns:
[`~models.unets.unet_2d_condition.UNet2DConditionOutput`] or `tuple`:
If `return_dict` is True, an [`~models.unets.unet_2d_condition.UNet2DConditionOutput`] is returned, otherwise
a `tuple` is returned where the first element is the sample tensor.
"""
# By default samples have to be AT least a multiple of the overall upsampling factor.
# The overall upsampling factor is equal to 2 ** (# num of upsampling layers).
# However, the upsampling interpolation output size can be forced to fit any upsampling size
# on the fly if necessary.
default_overall_up_factor = 2**self.num_upsamplers
# upsample size should be forwarded when sample is not a multiple of `default_overall_up_factor`
forward_upsample_size = False
upsample_size = None
for dim in sample.shape[-2:]:
if dim % default_overall_up_factor != 0:
# Forward upsample size to force interpolation output size.
forward_upsample_size = True
break
# ensure attention_mask is a bias, and give it a singleton query_tokens dimension
# expects mask of shape:
# [batch, key_tokens]
# adds singleton query_tokens dimension:
# [batch, 1, key_tokens]
# this helps to broadcast it as a bias over attention scores, which will be in one of the following shapes:
# [batch, heads, query_tokens, key_tokens] (e.g. torch sdp attn)
# [batch * heads, query_tokens, key_tokens] (e.g. xformers or classic attn)
if attention_mask is not None:
# assume that mask is expressed as:
# (1 = keep, 0 = discard)
# convert mask into a bias that can be added to attention scores:
# (keep = +0, discard = -10000.0)
attention_mask = (1 - attention_mask.to(sample.dtype)) * -10000.0
attention_mask = attention_mask.unsqueeze(1)
# convert encoder_attention_mask to a bias the same way we do for attention_mask
if encoder_attention_mask is not None:
encoder_attention_mask = (1 - encoder_attention_mask.to(sample.dtype)) * -10000.0
encoder_attention_mask = encoder_attention_mask.unsqueeze(1)
# 0. center input if necessary
if self.config.center_input_sample:
sample = 2 * sample - 1.0
# 1. time
timesteps = timestep
if not torch.is_tensor(timesteps):
# TODO: this requires sync between CPU and GPU. So try to pass timesteps as tensors if you can
# This would be a good case for the `match` statement (Python 3.10+)
is_mps = sample.device.type == "mps"
if isinstance(timestep, float):
dtype = torch.float32 if is_mps else torch.float64
else:
dtype = torch.int32 if is_mps else torch.int64
timesteps = torch.tensor([timesteps], dtype=dtype, device=sample.device)
elif len(timesteps.shape) == 0:
timesteps = timesteps[None].to(sample.device)
# broadcast to batch dimension in a way that's compatible with ONNX/Core ML
timesteps = timesteps.expand(sample.shape[0])
t_emb = self.time_proj(timesteps)
# `Timesteps` does not contain any weights and will always return f32 tensors
# but time_embedding might actually be running in fp16. so we need to cast here.
# there might be better ways to encapsulate this.
t_emb = t_emb.to(dtype=sample.dtype)
emb = self.time_embedding(t_emb, timestep_cond)
aug_emb = None
if self.class_embedding is not None:
if class_labels is None:
raise ValueError("class_labels should be provided when num_class_embeds > 0")
if self.config.class_embed_type == "timestep":
class_labels = self.time_proj(class_labels)
# `Timesteps` does not contain any weights and will always return f32 tensors
# there might be better ways to encapsulate this.
class_labels = class_labels.to(dtype=sample.dtype)
class_emb = self.class_embedding(class_labels).to(dtype=sample.dtype)
if self.config.class_embeddings_concat:
emb = torch.cat([emb, class_emb], dim=-1)
else:
emb = emb + class_emb
if self.config.addition_embed_type == "text":
aug_emb = self.add_embedding(encoder_hidden_states)
elif self.config.addition_embed_type == "text_image":
# Kandinsky 2.1 - style
if "image_embeds" not in added_cond_kwargs:
raise ValueError(
f"{self.__class__} has the config param `addition_embed_type` set to 'text_image' which requires the keyword argument `image_embeds` to be passed in `added_cond_kwargs`"
)
image_embs = added_cond_kwargs.get("image_embeds")
text_embs = added_cond_kwargs.get("text_embeds", encoder_hidden_states)
aug_emb = self.add_embedding(text_embs, image_embs)
elif self.config.addition_embed_type == "text_time":
# SDXL - style
if "text_embeds" not in added_cond_kwargs:
raise ValueError(
f"{self.__class__} has the config param `addition_embed_type` set to 'text_time' which requires the keyword argument `text_embeds` to be passed in `added_cond_kwargs`"
)
text_embeds = added_cond_kwargs.get("text_embeds")
if "time_ids" not in added_cond_kwargs:
raise ValueError(
f"{self.__class__} has the config param `addition_embed_type` set to 'text_time' which requires the keyword argument `time_ids` to be passed in `added_cond_kwargs`"
)
time_ids = added_cond_kwargs.get("time_ids")
time_embeds = self.add_time_proj(time_ids.flatten())
time_embeds = time_embeds.reshape((text_embeds.shape[0], -1))
add_embeds = torch.concat([text_embeds, time_embeds], dim=-1)
add_embeds = add_embeds.to(emb.dtype)
aug_emb = self.add_embedding(add_embeds)
elif self.config.addition_embed_type == "image":
# Kandinsky 2.2 - style
if "image_embeds" not in added_cond_kwargs:
raise ValueError(
f"{self.__class__} has the config param `addition_embed_type` set to 'image' which requires the keyword argument `image_embeds` to be passed in `added_cond_kwargs`"
)
image_embs = added_cond_kwargs.get("image_embeds")
aug_emb = self.add_embedding(image_embs)
elif self.config.addition_embed_type == "image_hint":
# Kandinsky 2.2 - style
if "image_embeds" not in added_cond_kwargs or "hint" not in added_cond_kwargs:
raise ValueError(
f"{self.__class__} has the config param `addition_embed_type` set to 'image_hint' which requires the keyword arguments `image_embeds` and `hint` to be passed in `added_cond_kwargs`"
)
image_embs = added_cond_kwargs.get("image_embeds")
hint = added_cond_kwargs.get("hint")
aug_emb, hint = self.add_embedding(image_embs, hint)
sample = torch.cat([sample, hint], dim=1)
emb = emb + aug_emb if aug_emb is not None else emb
if self.time_embed_act is not None:
emb = self.time_embed_act(emb)
if self.encoder_hid_proj is not None and self.config.encoder_hid_dim_type == "text_proj":
encoder_hidden_states = self.encoder_hid_proj(encoder_hidden_states)
elif self.encoder_hid_proj is not None and self.config.encoder_hid_dim_type == "text_image_proj":
# Kadinsky 2.1 - style
if "image_embeds" not in added_cond_kwargs:
raise ValueError(
f"{self.__class__} has the config param `encoder_hid_dim_type` set to 'text_image_proj' which requires the keyword argument `image_embeds` to be passed in `added_conditions`"
)
image_embeds = added_cond_kwargs.get("image_embeds")
encoder_hidden_states = self.encoder_hid_proj(encoder_hidden_states, image_embeds)
elif self.encoder_hid_proj is not None and self.config.encoder_hid_dim_type == "image_proj":
# Kandinsky 2.2 - style
if "image_embeds" not in added_cond_kwargs:
raise ValueError(
f"{self.__class__} has the config param `encoder_hid_dim_type` set to 'image_proj' which requires the keyword argument `image_embeds` to be passed in `added_conditions`"
)
image_embeds = added_cond_kwargs.get("image_embeds")
encoder_hidden_states = self.encoder_hid_proj(image_embeds)
elif self.encoder_hid_proj is not None and self.config.encoder_hid_dim_type == "ip_image_proj":
if "image_embeds" not in added_cond_kwargs:
raise ValueError(
f"{self.__class__} has the config param `encoder_hid_dim_type` set to 'ip_image_proj' which requires the keyword argument `image_embeds` to be passed in `added_conditions`"
)
image_embeds = added_cond_kwargs.get("image_embeds")
image_embeds = self.encoder_hid_proj(image_embeds)
encoder_hidden_states = (encoder_hidden_states, image_embeds)
# 2. pre-process
sample = self.conv_in(sample)
# 2.5 GLIGEN position net
if cross_attention_kwargs is not None and cross_attention_kwargs.get("gligen", None) is not None:
cross_attention_kwargs = cross_attention_kwargs.copy()
gligen_args = cross_attention_kwargs.pop("gligen")
cross_attention_kwargs["gligen"] = {"objs": self.position_net(**gligen_args)}
# 3. down
lora_scale = cross_attention_kwargs.get("scale", 1.0) if cross_attention_kwargs is not None else 1.0
if USE_PEFT_BACKEND:
# weight the lora layers by setting `lora_scale` for each PEFT layer
scale_lora_layers(self, lora_scale)
is_controlnet = mid_block_additional_residual is not None and down_block_additional_residuals is not None
# using new arg down_intrablock_additional_residuals for T2I-Adapters, to distinguish from controlnets
is_adapter = down_intrablock_additional_residuals is not None
# maintain backward compatibility for legacy usage, where
# T2I-Adapter and ControlNet both use down_block_additional_residuals arg
# but can only use one or the other
if not is_adapter and mid_block_additional_residual is None and down_block_additional_residuals is not None:
deprecate(
"T2I should not use down_block_additional_residuals",
"1.3.0",
"Passing intrablock residual connections with `down_block_additional_residuals` is deprecated \
and will be removed in diffusers 1.3.0. `down_block_additional_residuals` should only be used \
for ControlNet. Please make sure use `down_intrablock_additional_residuals` instead. ",
standard_warn=False,
)
down_intrablock_additional_residuals = down_block_additional_residuals
is_adapter = True
down_block_res_samples = (sample,)
for downsample_block in self.down_blocks:
if hasattr(downsample_block, "has_cross_attention") and downsample_block.has_cross_attention:
# For t2i-adapter CrossAttnDownBlock2D
additional_residuals = {}
if is_adapter and len(down_intrablock_additional_residuals) > 0:
additional_residuals["additional_residuals"] = down_intrablock_additional_residuals.pop(0)
sample, res_samples = downsample_block(
hidden_states=sample,
temb=emb,
encoder_hidden_states=encoder_hidden_states,
attention_mask=attention_mask,
cross_attention_kwargs=cross_attention_kwargs,
encoder_attention_mask=encoder_attention_mask,
**additional_residuals,
)
else:
sample, res_samples = downsample_block(hidden_states=sample, temb=emb, scale=lora_scale)
if is_adapter and len(down_intrablock_additional_residuals) > 0:
sample += down_intrablock_additional_residuals.pop(0)
down_block_res_samples += res_samples
if is_controlnet:
new_down_block_res_samples = ()
for down_block_res_sample, down_block_additional_residual in zip(
down_block_res_samples, down_block_additional_residuals
):
down_block_res_sample = down_block_res_sample + down_block_additional_residual
new_down_block_res_samples = new_down_block_res_samples + (down_block_res_sample,)
down_block_res_samples = new_down_block_res_samples
# 4. mid
if self.mid_block is not None:
if hasattr(self.mid_block, "has_cross_attention") and self.mid_block.has_cross_attention:
sample = self.mid_block(
sample,
emb,
encoder_hidden_states=encoder_hidden_states,
attention_mask=attention_mask,
cross_attention_kwargs=cross_attention_kwargs,
encoder_attention_mask=encoder_attention_mask,
)
else:
sample = self.mid_block(sample, emb)
# To support T2I-Adapter-XL
if (
is_adapter
and len(down_intrablock_additional_residuals) > 0
and sample.shape == down_intrablock_additional_residuals[0].shape
):
sample += down_intrablock_additional_residuals.pop(0)
if is_controlnet:
sample = sample + mid_block_additional_residual
# 5. up
for i, upsample_block in enumerate(self.up_blocks):
is_final_block = i == len(self.up_blocks) - 1
res_samples = down_block_res_samples[-len(upsample_block.resnets) :]
down_block_res_samples = down_block_res_samples[: -len(upsample_block.resnets)]
# if we have not reached the final block and need to forward the
# upsample size, we do it here
if not is_final_block and forward_upsample_size:
upsample_size = down_block_res_samples[-1].shape[2:]
if hasattr(upsample_block, "has_cross_attention") and upsample_block.has_cross_attention:
sample = upsample_block(
hidden_states=sample,
temb=emb,
res_hidden_states_tuple=res_samples,
encoder_hidden_states=encoder_hidden_states,
cross_attention_kwargs=cross_attention_kwargs,
upsample_size=upsample_size,
attention_mask=attention_mask,
encoder_attention_mask=encoder_attention_mask,
)
else:
sample = upsample_block(
hidden_states=sample,
temb=emb,
res_hidden_states_tuple=res_samples,
upsample_size=upsample_size,
scale=lora_scale,
)
# 6. post-process
if self.conv_norm_out:
sample = self.conv_norm_out(sample)
sample = self.conv_act(sample)
sample = self.conv_out(sample)
if USE_PEFT_BACKEND:
# remove `lora_scale` from each PEFT layer
unscale_lora_layers(self, lora_scale)
if not return_dict:
return (sample,)
return UNet2DConditionOutput(sample=sample)
| diffusers/src/diffusers/models/unets/unet_2d_condition.py/0 | {
"file_path": "diffusers/src/diffusers/models/unets/unet_2d_condition.py",
"repo_id": "diffusers",
"token_count": 28401
} | 110 |
# Copyright 2023 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
from typing import Any, Callable, Dict, List, Optional, Tuple, Union
import torch
from transformers import CLIPTextModelWithProjection, CLIPTokenizer
from ...image_processor import VaeImageProcessor
from ...models import UVit2DModel, VQModel
from ...schedulers import AmusedScheduler
from ...utils import replace_example_docstring
from ..pipeline_utils import DiffusionPipeline, ImagePipelineOutput
EXAMPLE_DOC_STRING = """
Examples:
```py
>>> import torch
>>> from diffusers import AmusedPipeline
>>> pipe = AmusedPipeline.from_pretrained(
... "amused/amused-512", variant="fp16", torch_dtype=torch.float16
... )
>>> pipe = pipe.to("cuda")
>>> prompt = "a photo of an astronaut riding a horse on mars"
>>> image = pipe(prompt).images[0]
```
"""
class AmusedPipeline(DiffusionPipeline):
image_processor: VaeImageProcessor
vqvae: VQModel
tokenizer: CLIPTokenizer
text_encoder: CLIPTextModelWithProjection
transformer: UVit2DModel
scheduler: AmusedScheduler
model_cpu_offload_seq = "text_encoder->transformer->vqvae"
def __init__(
self,
vqvae: VQModel,
tokenizer: CLIPTokenizer,
text_encoder: CLIPTextModelWithProjection,
transformer: UVit2DModel,
scheduler: AmusedScheduler,
):
super().__init__()
self.register_modules(
vqvae=vqvae,
tokenizer=tokenizer,
text_encoder=text_encoder,
transformer=transformer,
scheduler=scheduler,
)
self.vae_scale_factor = 2 ** (len(self.vqvae.config.block_out_channels) - 1)
self.image_processor = VaeImageProcessor(vae_scale_factor=self.vae_scale_factor, do_normalize=False)
@torch.no_grad()
@replace_example_docstring(EXAMPLE_DOC_STRING)
def __call__(
self,
prompt: Optional[Union[List[str], str]] = None,
height: Optional[int] = None,
width: Optional[int] = None,
num_inference_steps: int = 12,
guidance_scale: float = 10.0,
negative_prompt: Optional[Union[str, List[str]]] = None,
num_images_per_prompt: Optional[int] = 1,
generator: Optional[torch.Generator] = None,
latents: Optional[torch.IntTensor] = None,
prompt_embeds: Optional[torch.Tensor] = None,
encoder_hidden_states: Optional[torch.Tensor] = None,
negative_prompt_embeds: Optional[torch.Tensor] = None,
negative_encoder_hidden_states: Optional[torch.Tensor] = None,
output_type="pil",
return_dict: bool = True,
callback: Optional[Callable[[int, int, torch.FloatTensor], None]] = None,
callback_steps: int = 1,
cross_attention_kwargs: Optional[Dict[str, Any]] = None,
micro_conditioning_aesthetic_score: int = 6,
micro_conditioning_crop_coord: Tuple[int, int] = (0, 0),
temperature: Union[int, Tuple[int, int], List[int]] = (2, 0),
):
"""
The call function to the pipeline for generation.
Args:
prompt (`str` or `List[str]`, *optional*):
The prompt or prompts to guide image generation. If not defined, you need to pass `prompt_embeds`.
height (`int`, *optional*, defaults to `self.transformer.config.sample_size * self.vae_scale_factor`):
The height in pixels of the generated image.
width (`int`, *optional*, defaults to `self.unet.config.sample_size * self.vae_scale_factor`):
The width in pixels of the generated image.
num_inference_steps (`int`, *optional*, defaults to 16):
The number of denoising steps. More denoising steps usually lead to a higher quality image at the
expense of slower inference.
guidance_scale (`float`, *optional*, defaults to 10.0):
A higher guidance scale value encourages the model to generate images closely linked to the text
`prompt` at the expense of lower image quality. Guidance scale is enabled when `guidance_scale > 1`.
negative_prompt (`str` or `List[str]`, *optional*):
The prompt or prompts to guide what to not include in image generation. If not defined, you need to
pass `negative_prompt_embeds` instead. Ignored when not using guidance (`guidance_scale < 1`).
num_images_per_prompt (`int`, *optional*, defaults to 1):
The number of images to generate per prompt.
generator (`torch.Generator`, *optional*):
A [`torch.Generator`](https://pytorch.org/docs/stable/generated/torch.Generator.html) to make
generation deterministic.
latents (`torch.IntTensor`, *optional*):
Pre-generated tokens representing latent vectors in `self.vqvae`, to be used as inputs for image
gneration. If not provided, the starting latents will be completely masked.
prompt_embeds (`torch.FloatTensor`, *optional*):
Pre-generated text embeddings. Can be used to easily tweak text inputs (prompt weighting). If not
provided, text embeddings are generated from the `prompt` input argument. A single vector from the
pooled and projected final hidden states.
encoder_hidden_states (`torch.FloatTensor`, *optional*):
Pre-generated penultimate hidden states from the text encoder providing additional text conditioning.
negative_prompt_embeds (`torch.FloatTensor`, *optional*):
Pre-generated negative text embeddings. Can be used to easily tweak text inputs (prompt weighting). If
not provided, `negative_prompt_embeds` are generated from the `negative_prompt` input argument.
negative_encoder_hidden_states (`torch.FloatTensor`, *optional*):
Analogous to `encoder_hidden_states` for the positive prompt.
output_type (`str`, *optional*, defaults to `"pil"`):
The output format of the generated image. Choose between `PIL.Image` or `np.array`.
return_dict (`bool`, *optional*, defaults to `True`):
Whether or not to return a [`~pipelines.stable_diffusion.StableDiffusionPipelineOutput`] instead of a
plain tuple.
callback (`Callable`, *optional*):
A function that calls every `callback_steps` steps during inference. The function is called with the
following arguments: `callback(step: int, timestep: int, latents: torch.FloatTensor)`.
callback_steps (`int`, *optional*, defaults to 1):
The frequency at which the `callback` function is called. If not specified, the callback is called at
every step.
cross_attention_kwargs (`dict`, *optional*):
A kwargs dictionary that if specified is passed along to the [`AttentionProcessor`] as defined in
[`self.processor`](https://github.com/huggingface/diffusers/blob/main/src/diffusers/models/attention_processor.py).
micro_conditioning_aesthetic_score (`int`, *optional*, defaults to 6):
The targeted aesthetic score according to the laion aesthetic classifier. See https://laion.ai/blog/laion-aesthetics/
and the micro-conditioning section of https://arxiv.org/abs/2307.01952.
micro_conditioning_crop_coord (`Tuple[int]`, *optional*, defaults to (0, 0)):
The targeted height, width crop coordinates. See the micro-conditioning section of https://arxiv.org/abs/2307.01952.
temperature (`Union[int, Tuple[int, int], List[int]]`, *optional*, defaults to (2, 0)):
Configures the temperature scheduler on `self.scheduler` see `AmusedScheduler#set_timesteps`.
Examples:
Returns:
[`~pipelines.pipeline_utils.ImagePipelineOutput`] or `tuple`:
If `return_dict` is `True`, [`~pipelines.pipeline_utils.ImagePipelineOutput`] is returned, otherwise a
`tuple` is returned where the first element is a list with the generated images.
"""
if (prompt_embeds is not None and encoder_hidden_states is None) or (
prompt_embeds is None and encoder_hidden_states is not None
):
raise ValueError("pass either both `prompt_embeds` and `encoder_hidden_states` or neither")
if (negative_prompt_embeds is not None and negative_encoder_hidden_states is None) or (
negative_prompt_embeds is None and negative_encoder_hidden_states is not None
):
raise ValueError(
"pass either both `negatve_prompt_embeds` and `negative_encoder_hidden_states` or neither"
)
if (prompt is None and prompt_embeds is None) or (prompt is not None and prompt_embeds is not None):
raise ValueError("pass only one of `prompt` or `prompt_embeds`")
if isinstance(prompt, str):
prompt = [prompt]
if prompt is not None:
batch_size = len(prompt)
else:
batch_size = prompt_embeds.shape[0]
batch_size = batch_size * num_images_per_prompt
if height is None:
height = self.transformer.config.sample_size * self.vae_scale_factor
if width is None:
width = self.transformer.config.sample_size * self.vae_scale_factor
if prompt_embeds is None:
input_ids = self.tokenizer(
prompt,
return_tensors="pt",
padding="max_length",
truncation=True,
max_length=self.tokenizer.model_max_length,
).input_ids.to(self._execution_device)
outputs = self.text_encoder(input_ids, return_dict=True, output_hidden_states=True)
prompt_embeds = outputs.text_embeds
encoder_hidden_states = outputs.hidden_states[-2]
prompt_embeds = prompt_embeds.repeat(num_images_per_prompt, 1)
encoder_hidden_states = encoder_hidden_states.repeat(num_images_per_prompt, 1, 1)
if guidance_scale > 1.0:
if negative_prompt_embeds is None:
if negative_prompt is None:
negative_prompt = [""] * len(prompt)
if isinstance(negative_prompt, str):
negative_prompt = [negative_prompt]
input_ids = self.tokenizer(
negative_prompt,
return_tensors="pt",
padding="max_length",
truncation=True,
max_length=self.tokenizer.model_max_length,
).input_ids.to(self._execution_device)
outputs = self.text_encoder(input_ids, return_dict=True, output_hidden_states=True)
negative_prompt_embeds = outputs.text_embeds
negative_encoder_hidden_states = outputs.hidden_states[-2]
negative_prompt_embeds = negative_prompt_embeds.repeat(num_images_per_prompt, 1)
negative_encoder_hidden_states = negative_encoder_hidden_states.repeat(num_images_per_prompt, 1, 1)
prompt_embeds = torch.concat([negative_prompt_embeds, prompt_embeds])
encoder_hidden_states = torch.concat([negative_encoder_hidden_states, encoder_hidden_states])
# Note that the micro conditionings _do_ flip the order of width, height for the original size
# and the crop coordinates. This is how it was done in the original code base
micro_conds = torch.tensor(
[
width,
height,
micro_conditioning_crop_coord[0],
micro_conditioning_crop_coord[1],
micro_conditioning_aesthetic_score,
],
device=self._execution_device,
dtype=encoder_hidden_states.dtype,
)
micro_conds = micro_conds.unsqueeze(0)
micro_conds = micro_conds.expand(2 * batch_size if guidance_scale > 1.0 else batch_size, -1)
shape = (batch_size, height // self.vae_scale_factor, width // self.vae_scale_factor)
if latents is None:
latents = torch.full(
shape, self.scheduler.config.mask_token_id, dtype=torch.long, device=self._execution_device
)
self.scheduler.set_timesteps(num_inference_steps, temperature, self._execution_device)
num_warmup_steps = len(self.scheduler.timesteps) - num_inference_steps * self.scheduler.order
with self.progress_bar(total=num_inference_steps) as progress_bar:
for i, timestep in enumerate(self.scheduler.timesteps):
if guidance_scale > 1.0:
model_input = torch.cat([latents] * 2)
else:
model_input = latents
model_output = self.transformer(
model_input,
micro_conds=micro_conds,
pooled_text_emb=prompt_embeds,
encoder_hidden_states=encoder_hidden_states,
cross_attention_kwargs=cross_attention_kwargs,
)
if guidance_scale > 1.0:
uncond_logits, cond_logits = model_output.chunk(2)
model_output = uncond_logits + guidance_scale * (cond_logits - uncond_logits)
latents = self.scheduler.step(
model_output=model_output,
timestep=timestep,
sample=latents,
generator=generator,
).prev_sample
if i == len(self.scheduler.timesteps) - 1 or (
(i + 1) > num_warmup_steps and (i + 1) % self.scheduler.order == 0
):
progress_bar.update()
if callback is not None and i % callback_steps == 0:
step_idx = i // getattr(self.scheduler, "order", 1)
callback(step_idx, timestep, latents)
if output_type == "latent":
output = latents
else:
needs_upcasting = self.vqvae.dtype == torch.float16 and self.vqvae.config.force_upcast
if needs_upcasting:
self.vqvae.float()
output = self.vqvae.decode(
latents,
force_not_quantize=True,
shape=(
batch_size,
height // self.vae_scale_factor,
width // self.vae_scale_factor,
self.vqvae.config.latent_channels,
),
).sample.clip(0, 1)
output = self.image_processor.postprocess(output, output_type)
if needs_upcasting:
self.vqvae.half()
self.maybe_free_model_hooks()
if not return_dict:
return (output,)
return ImagePipelineOutput(output)
| diffusers/src/diffusers/pipelines/amused/pipeline_amused.py/0 | {
"file_path": "diffusers/src/diffusers/pipelines/amused/pipeline_amused.py",
"repo_id": "diffusers",
"token_count": 6938
} | 111 |
# Copyright 2023 Salesforce.com, inc.
# Copyright 2023 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
from typing import Optional, Tuple, Union
import torch
from torch import nn
from transformers import CLIPPreTrainedModel
from transformers.modeling_outputs import BaseModelOutputWithPooling
from transformers.models.clip.configuration_clip import CLIPTextConfig
from transformers.models.clip.modeling_clip import CLIPEncoder
def _expand_mask(mask: torch.Tensor, dtype: torch.dtype, tgt_len: Optional[int] = None):
"""
Expands attention_mask from `[bsz, seq_len]` to `[bsz, 1, tgt_seq_len, src_seq_len]`.
"""
bsz, src_len = mask.size()
tgt_len = tgt_len if tgt_len is not None else src_len
expanded_mask = mask[:, None, None, :].expand(bsz, 1, tgt_len, src_len).to(dtype)
inverted_mask = 1.0 - expanded_mask
return inverted_mask.masked_fill(inverted_mask.to(torch.bool), torch.finfo(dtype).min)
# This is a modified version of the CLIPTextModel from transformers.models.clip.modeling_clip
# Which allows for an extra input of "context embeddings", which are the query embeddings used in Qformer
# They pass through the clip model, along with the text embeddings, and interact with them using self attention
class ContextCLIPTextModel(CLIPPreTrainedModel):
config_class = CLIPTextConfig
_no_split_modules = ["CLIPEncoderLayer"]
def __init__(self, config: CLIPTextConfig):
super().__init__(config)
self.text_model = ContextCLIPTextTransformer(config)
# Initialize weights and apply final processing
self.post_init()
def forward(
self,
ctx_embeddings: torch.Tensor = None,
ctx_begin_pos: list = None,
input_ids: Optional[torch.Tensor] = None,
attention_mask: Optional[torch.Tensor] = None,
position_ids: Optional[torch.Tensor] = None,
output_attentions: Optional[bool] = None,
output_hidden_states: Optional[bool] = None,
return_dict: Optional[bool] = None,
) -> Union[Tuple, BaseModelOutputWithPooling]:
return self.text_model(
ctx_embeddings=ctx_embeddings,
ctx_begin_pos=ctx_begin_pos,
input_ids=input_ids,
attention_mask=attention_mask,
position_ids=position_ids,
output_attentions=output_attentions,
output_hidden_states=output_hidden_states,
return_dict=return_dict,
)
class ContextCLIPTextTransformer(nn.Module):
def __init__(self, config: CLIPTextConfig):
super().__init__()
self.config = config
embed_dim = config.hidden_size
self.embeddings = ContextCLIPTextEmbeddings(config)
self.encoder = CLIPEncoder(config)
self.final_layer_norm = nn.LayerNorm(embed_dim)
def forward(
self,
ctx_embeddings: torch.Tensor,
ctx_begin_pos: list,
input_ids: Optional[torch.Tensor] = None,
attention_mask: Optional[torch.Tensor] = None,
position_ids: Optional[torch.Tensor] = None,
output_attentions: Optional[bool] = None,
output_hidden_states: Optional[bool] = None,
return_dict: Optional[bool] = None,
) -> Union[Tuple, BaseModelOutputWithPooling]:
r"""
Returns:
"""
output_attentions = output_attentions if output_attentions is not None else self.config.output_attentions
output_hidden_states = (
output_hidden_states if output_hidden_states is not None else self.config.output_hidden_states
)
return_dict = return_dict if return_dict is not None else self.config.use_return_dict
if input_ids is None:
raise ValueError("You have to specify either input_ids")
input_shape = input_ids.size()
input_ids = input_ids.view(-1, input_shape[-1])
hidden_states = self.embeddings(
input_ids=input_ids,
position_ids=position_ids,
ctx_embeddings=ctx_embeddings,
ctx_begin_pos=ctx_begin_pos,
)
bsz, seq_len = input_shape
if ctx_embeddings is not None:
seq_len += ctx_embeddings.size(1)
# CLIP's text model uses causal mask, prepare it here.
# https://github.com/openai/CLIP/blob/cfcffb90e69f37bf2ff1e988237a0fbe41f33c04/clip/model.py#L324
causal_attention_mask = self._build_causal_attention_mask(bsz, seq_len, hidden_states.dtype).to(
hidden_states.device
)
# expand attention_mask
if attention_mask is not None:
# [bsz, seq_len] -> [bsz, 1, tgt_seq_len, src_seq_len]
attention_mask = _expand_mask(attention_mask, hidden_states.dtype)
encoder_outputs = self.encoder(
inputs_embeds=hidden_states,
attention_mask=attention_mask,
causal_attention_mask=causal_attention_mask,
output_attentions=output_attentions,
output_hidden_states=output_hidden_states,
return_dict=return_dict,
)
last_hidden_state = encoder_outputs[0]
last_hidden_state = self.final_layer_norm(last_hidden_state)
# text_embeds.shape = [batch_size, sequence_length, transformer.width]
# take features from the eot embedding (eot_token is the highest number in each sequence)
# casting to torch.int for onnx compatibility: argmax doesn't support int64 inputs with opset 14
pooled_output = last_hidden_state[
torch.arange(last_hidden_state.shape[0], device=input_ids.device),
input_ids.to(torch.int).argmax(dim=-1),
]
if not return_dict:
return (last_hidden_state, pooled_output) + encoder_outputs[1:]
return BaseModelOutputWithPooling(
last_hidden_state=last_hidden_state,
pooler_output=pooled_output,
hidden_states=encoder_outputs.hidden_states,
attentions=encoder_outputs.attentions,
)
def _build_causal_attention_mask(self, bsz, seq_len, dtype):
# lazily create causal attention mask, with full attention between the vision tokens
# pytorch uses additive attention mask; fill with -inf
mask = torch.empty(bsz, seq_len, seq_len, dtype=dtype)
mask.fill_(torch.tensor(torch.finfo(dtype).min))
mask.triu_(1) # zero out the lower diagonal
mask = mask.unsqueeze(1) # expand mask
return mask
class ContextCLIPTextEmbeddings(nn.Module):
def __init__(self, config: CLIPTextConfig):
super().__init__()
embed_dim = config.hidden_size
self.token_embedding = nn.Embedding(config.vocab_size, embed_dim)
self.position_embedding = nn.Embedding(config.max_position_embeddings, embed_dim)
# position_ids (1, len position emb) is contiguous in memory and exported when serialized
self.register_buffer("position_ids", torch.arange(config.max_position_embeddings).expand((1, -1)))
def forward(
self,
ctx_embeddings: torch.Tensor,
ctx_begin_pos: list,
input_ids: Optional[torch.LongTensor] = None,
position_ids: Optional[torch.LongTensor] = None,
inputs_embeds: Optional[torch.FloatTensor] = None,
) -> torch.Tensor:
if ctx_embeddings is None:
ctx_len = 0
else:
ctx_len = ctx_embeddings.shape[1]
seq_length = (input_ids.shape[-1] if input_ids is not None else inputs_embeds.shape[-2]) + ctx_len
if position_ids is None:
position_ids = self.position_ids[:, :seq_length]
if inputs_embeds is None:
inputs_embeds = self.token_embedding(input_ids)
# for each input embeddings, add the ctx embeddings at the correct position
input_embeds_ctx = []
bsz = inputs_embeds.shape[0]
if ctx_embeddings is not None:
for i in range(bsz):
cbp = ctx_begin_pos[i]
prefix = inputs_embeds[i, :cbp]
# remove the special token embedding
suffix = inputs_embeds[i, cbp:]
input_embeds_ctx.append(torch.cat([prefix, ctx_embeddings[i], suffix], dim=0))
inputs_embeds = torch.stack(input_embeds_ctx, dim=0)
position_embeddings = self.position_embedding(position_ids)
embeddings = inputs_embeds + position_embeddings
return embeddings
| diffusers/src/diffusers/pipelines/blip_diffusion/modeling_ctx_clip.py/0 | {
"file_path": "diffusers/src/diffusers/pipelines/blip_diffusion/modeling_ctx_clip.py",
"repo_id": "diffusers",
"token_count": 3811
} | 112 |
from typing import TYPE_CHECKING
from ...utils import DIFFUSERS_SLOW_IMPORT, _LazyModule
_import_structure = {"pipeline_ddim": ["DDIMPipeline"]}
if TYPE_CHECKING or DIFFUSERS_SLOW_IMPORT:
from .pipeline_ddim import DDIMPipeline
else:
import sys
sys.modules[__name__] = _LazyModule(
__name__,
globals()["__file__"],
_import_structure,
module_spec=__spec__,
)
| diffusers/src/diffusers/pipelines/ddim/__init__.py/0 | {
"file_path": "diffusers/src/diffusers/pipelines/ddim/__init__.py",
"repo_id": "diffusers",
"token_count": 180
} | 113 |
from typing import TYPE_CHECKING
from ...utils import (
DIFFUSERS_SLOW_IMPORT,
OptionalDependencyNotAvailable,
_LazyModule,
get_objects_from_module,
is_librosa_available,
is_note_seq_available,
is_torch_available,
is_transformers_available,
)
_dummy_objects = {}
_import_structure = {}
try:
if not is_torch_available():
raise OptionalDependencyNotAvailable()
except OptionalDependencyNotAvailable:
from ...utils import dummy_pt_objects
_dummy_objects.update(get_objects_from_module(dummy_pt_objects))
else:
_import_structure["latent_diffusion_uncond"] = ["LDMPipeline"]
_import_structure["pndm"] = ["PNDMPipeline"]
_import_structure["repaint"] = ["RePaintPipeline"]
_import_structure["score_sde_ve"] = ["ScoreSdeVePipeline"]
_import_structure["stochastic_karras_ve"] = ["KarrasVePipeline"]
try:
if not (is_transformers_available() and is_torch_available()):
raise OptionalDependencyNotAvailable()
except OptionalDependencyNotAvailable:
from ...utils import dummy_torch_and_transformers_objects
_dummy_objects.update(get_objects_from_module(dummy_torch_and_transformers_objects))
else:
_import_structure["alt_diffusion"] = [
"AltDiffusionImg2ImgPipeline",
"AltDiffusionPipeline",
"AltDiffusionPipelineOutput",
]
_import_structure["versatile_diffusion"] = [
"VersatileDiffusionDualGuidedPipeline",
"VersatileDiffusionImageVariationPipeline",
"VersatileDiffusionPipeline",
"VersatileDiffusionTextToImagePipeline",
]
_import_structure["vq_diffusion"] = ["VQDiffusionPipeline"]
_import_structure["stable_diffusion_variants"] = [
"CycleDiffusionPipeline",
"StableDiffusionInpaintPipelineLegacy",
"StableDiffusionPix2PixZeroPipeline",
"StableDiffusionParadigmsPipeline",
"StableDiffusionModelEditingPipeline",
]
try:
if not (is_torch_available() and is_librosa_available()):
raise OptionalDependencyNotAvailable()
except OptionalDependencyNotAvailable:
from ...utils import dummy_torch_and_librosa_objects # noqa F403
_dummy_objects.update(get_objects_from_module(dummy_torch_and_librosa_objects))
else:
_import_structure["audio_diffusion"] = ["AudioDiffusionPipeline", "Mel"]
try:
if not (is_transformers_available() and is_torch_available() and is_note_seq_available()):
raise OptionalDependencyNotAvailable()
except OptionalDependencyNotAvailable:
from ...utils import dummy_transformers_and_torch_and_note_seq_objects # noqa F403
_dummy_objects.update(get_objects_from_module(dummy_transformers_and_torch_and_note_seq_objects))
else:
_import_structure["spectrogram_diffusion"] = ["MidiProcessor", "SpectrogramDiffusionPipeline"]
if TYPE_CHECKING or DIFFUSERS_SLOW_IMPORT:
try:
if not is_torch_available():
raise OptionalDependencyNotAvailable()
except OptionalDependencyNotAvailable:
from ...utils.dummy_pt_objects import *
else:
from .latent_diffusion_uncond import LDMPipeline
from .pndm import PNDMPipeline
from .repaint import RePaintPipeline
from .score_sde_ve import ScoreSdeVePipeline
from .stochastic_karras_ve import KarrasVePipeline
try:
if not (is_transformers_available() and is_torch_available()):
raise OptionalDependencyNotAvailable()
except OptionalDependencyNotAvailable:
from ...utils.dummy_torch_and_transformers_objects import *
else:
from .alt_diffusion import AltDiffusionImg2ImgPipeline, AltDiffusionPipeline, AltDiffusionPipelineOutput
from .audio_diffusion import AudioDiffusionPipeline, Mel
from .spectrogram_diffusion import SpectrogramDiffusionPipeline
from .stable_diffusion_variants import (
CycleDiffusionPipeline,
StableDiffusionInpaintPipelineLegacy,
StableDiffusionModelEditingPipeline,
StableDiffusionParadigmsPipeline,
StableDiffusionPix2PixZeroPipeline,
)
from .stochastic_karras_ve import KarrasVePipeline
from .versatile_diffusion import (
VersatileDiffusionDualGuidedPipeline,
VersatileDiffusionImageVariationPipeline,
VersatileDiffusionPipeline,
VersatileDiffusionTextToImagePipeline,
)
from .vq_diffusion import VQDiffusionPipeline
try:
if not (is_torch_available() and is_librosa_available()):
raise OptionalDependencyNotAvailable()
except OptionalDependencyNotAvailable:
from ...utils.dummy_torch_and_librosa_objects import *
else:
from .audio_diffusion import AudioDiffusionPipeline, Mel
try:
if not (is_transformers_available() and is_torch_available() and is_note_seq_available()):
raise OptionalDependencyNotAvailable()
except OptionalDependencyNotAvailable:
from ...utils.dummy_transformers_and_torch_and_note_seq_objects import * # noqa F403
else:
from .spectrogram_diffusion import (
MidiProcessor,
SpectrogramDiffusionPipeline,
)
else:
import sys
sys.modules[__name__] = _LazyModule(
__name__,
globals()["__file__"],
_import_structure,
module_spec=__spec__,
)
for name, value in _dummy_objects.items():
setattr(sys.modules[__name__], name, value)
| diffusers/src/diffusers/pipelines/deprecated/__init__.py/0 | {
"file_path": "diffusers/src/diffusers/pipelines/deprecated/__init__.py",
"repo_id": "diffusers",
"token_count": 2227
} | 114 |
# Copyright 2023 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
from typing import List, Optional, Tuple, Union
import torch
from ....models import UNet2DModel
from ....schedulers import ScoreSdeVeScheduler
from ....utils.torch_utils import randn_tensor
from ...pipeline_utils import DiffusionPipeline, ImagePipelineOutput
class ScoreSdeVePipeline(DiffusionPipeline):
r"""
Pipeline for unconditional image generation.
This model inherits from [`DiffusionPipeline`]. Check the superclass documentation for the generic methods
implemented for all pipelines (downloading, saving, running on a particular device, etc.).
Parameters:
unet ([`UNet2DModel`]):
A `UNet2DModel` to denoise the encoded image.
scheduler ([`ScoreSdeVeScheduler`]):
A `ScoreSdeVeScheduler` to be used in combination with `unet` to denoise the encoded image.
"""
unet: UNet2DModel
scheduler: ScoreSdeVeScheduler
def __init__(self, unet: UNet2DModel, scheduler: ScoreSdeVeScheduler):
super().__init__()
self.register_modules(unet=unet, scheduler=scheduler)
@torch.no_grad()
def __call__(
self,
batch_size: int = 1,
num_inference_steps: int = 2000,
generator: Optional[Union[torch.Generator, List[torch.Generator]]] = None,
output_type: Optional[str] = "pil",
return_dict: bool = True,
**kwargs,
) -> Union[ImagePipelineOutput, Tuple]:
r"""
The call function to the pipeline for generation.
Args:
batch_size (`int`, *optional*, defaults to 1):
The number of images to generate.
generator (`torch.Generator`, `optional`):
A [`torch.Generator`](https://pytorch.org/docs/stable/generated/torch.Generator.html) to make
generation deterministic.
output_type (`str`, `optional`, defaults to `"pil"`):
The output format of the generated image. Choose between `PIL.Image` or `np.array`.
return_dict (`bool`, *optional*, defaults to `True`):
Whether or not to return a [`ImagePipelineOutput`] instead of a plain tuple.
Returns:
[`~pipelines.ImagePipelineOutput`] or `tuple`:
If `return_dict` is `True`, [`~pipelines.ImagePipelineOutput`] is returned, otherwise a `tuple` is
returned where the first element is a list with the generated images.
"""
img_size = self.unet.config.sample_size
shape = (batch_size, 3, img_size, img_size)
model = self.unet
sample = randn_tensor(shape, generator=generator) * self.scheduler.init_noise_sigma
sample = sample.to(self.device)
self.scheduler.set_timesteps(num_inference_steps)
self.scheduler.set_sigmas(num_inference_steps)
for i, t in enumerate(self.progress_bar(self.scheduler.timesteps)):
sigma_t = self.scheduler.sigmas[i] * torch.ones(shape[0], device=self.device)
# correction step
for _ in range(self.scheduler.config.correct_steps):
model_output = self.unet(sample, sigma_t).sample
sample = self.scheduler.step_correct(model_output, sample, generator=generator).prev_sample
# prediction step
model_output = model(sample, sigma_t).sample
output = self.scheduler.step_pred(model_output, t, sample, generator=generator)
sample, sample_mean = output.prev_sample, output.prev_sample_mean
sample = sample_mean.clamp(0, 1)
sample = sample.cpu().permute(0, 2, 3, 1).numpy()
if output_type == "pil":
sample = self.numpy_to_pil(sample)
if not return_dict:
return (sample,)
return ImagePipelineOutput(images=sample)
| diffusers/src/diffusers/pipelines/deprecated/score_sde_ve/pipeline_score_sde_ve.py/0 | {
"file_path": "diffusers/src/diffusers/pipelines/deprecated/score_sde_ve/pipeline_score_sde_ve.py",
"repo_id": "diffusers",
"token_count": 1760
} | 115 |
from typing import Any, Dict, List, Optional, Tuple, Union
import numpy as np
import torch
import torch.nn as nn
import torch.nn.functional as F
from diffusers.utils import deprecate
from ....configuration_utils import ConfigMixin, register_to_config
from ....models import ModelMixin
from ....models.activations import get_activation
from ....models.attention_processor import (
ADDED_KV_ATTENTION_PROCESSORS,
CROSS_ATTENTION_PROCESSORS,
Attention,
AttentionProcessor,
AttnAddedKVProcessor,
AttnAddedKVProcessor2_0,
AttnProcessor,
)
from ....models.embeddings import (
GaussianFourierProjection,
ImageHintTimeEmbedding,
ImageProjection,
ImageTimeEmbedding,
TextImageProjection,
TextImageTimeEmbedding,
TextTimeEmbedding,
TimestepEmbedding,
Timesteps,
)
from ....models.resnet import ResnetBlockCondNorm2D
from ....models.transformers.dual_transformer_2d import DualTransformer2DModel
from ....models.transformers.transformer_2d import Transformer2DModel
from ....models.unets.unet_2d_condition import UNet2DConditionOutput
from ....utils import USE_PEFT_BACKEND, is_torch_version, logging, scale_lora_layers, unscale_lora_layers
from ....utils.torch_utils import apply_freeu
logger = logging.get_logger(__name__) # pylint: disable=invalid-name
def get_down_block(
down_block_type,
num_layers,
in_channels,
out_channels,
temb_channels,
add_downsample,
resnet_eps,
resnet_act_fn,
num_attention_heads,
transformer_layers_per_block,
attention_type,
attention_head_dim,
resnet_groups=None,
cross_attention_dim=None,
downsample_padding=None,
dual_cross_attention=False,
use_linear_projection=False,
only_cross_attention=False,
upcast_attention=False,
resnet_time_scale_shift="default",
resnet_skip_time_act=False,
resnet_out_scale_factor=1.0,
cross_attention_norm=None,
dropout=0.0,
):
down_block_type = down_block_type[7:] if down_block_type.startswith("UNetRes") else down_block_type
if down_block_type == "DownBlockFlat":
return DownBlockFlat(
num_layers=num_layers,
in_channels=in_channels,
out_channels=out_channels,
temb_channels=temb_channels,
dropout=dropout,
add_downsample=add_downsample,
resnet_eps=resnet_eps,
resnet_act_fn=resnet_act_fn,
resnet_groups=resnet_groups,
downsample_padding=downsample_padding,
resnet_time_scale_shift=resnet_time_scale_shift,
)
elif down_block_type == "CrossAttnDownBlockFlat":
if cross_attention_dim is None:
raise ValueError("cross_attention_dim must be specified for CrossAttnDownBlockFlat")
return CrossAttnDownBlockFlat(
num_layers=num_layers,
in_channels=in_channels,
out_channels=out_channels,
temb_channels=temb_channels,
dropout=dropout,
add_downsample=add_downsample,
resnet_eps=resnet_eps,
resnet_act_fn=resnet_act_fn,
resnet_groups=resnet_groups,
downsample_padding=downsample_padding,
cross_attention_dim=cross_attention_dim,
num_attention_heads=num_attention_heads,
dual_cross_attention=dual_cross_attention,
use_linear_projection=use_linear_projection,
only_cross_attention=only_cross_attention,
resnet_time_scale_shift=resnet_time_scale_shift,
)
raise ValueError(f"{down_block_type} is not supported.")
def get_up_block(
up_block_type,
num_layers,
in_channels,
out_channels,
prev_output_channel,
temb_channels,
add_upsample,
resnet_eps,
resnet_act_fn,
num_attention_heads,
transformer_layers_per_block,
resolution_idx,
attention_type,
attention_head_dim,
resnet_groups=None,
cross_attention_dim=None,
dual_cross_attention=False,
use_linear_projection=False,
only_cross_attention=False,
upcast_attention=False,
resnet_time_scale_shift="default",
resnet_skip_time_act=False,
resnet_out_scale_factor=1.0,
cross_attention_norm=None,
dropout=0.0,
):
up_block_type = up_block_type[7:] if up_block_type.startswith("UNetRes") else up_block_type
if up_block_type == "UpBlockFlat":
return UpBlockFlat(
num_layers=num_layers,
in_channels=in_channels,
out_channels=out_channels,
prev_output_channel=prev_output_channel,
temb_channels=temb_channels,
dropout=dropout,
add_upsample=add_upsample,
resnet_eps=resnet_eps,
resnet_act_fn=resnet_act_fn,
resnet_groups=resnet_groups,
resnet_time_scale_shift=resnet_time_scale_shift,
)
elif up_block_type == "CrossAttnUpBlockFlat":
if cross_attention_dim is None:
raise ValueError("cross_attention_dim must be specified for CrossAttnUpBlockFlat")
return CrossAttnUpBlockFlat(
num_layers=num_layers,
in_channels=in_channels,
out_channels=out_channels,
prev_output_channel=prev_output_channel,
temb_channels=temb_channels,
dropout=dropout,
add_upsample=add_upsample,
resnet_eps=resnet_eps,
resnet_act_fn=resnet_act_fn,
resnet_groups=resnet_groups,
cross_attention_dim=cross_attention_dim,
num_attention_heads=num_attention_heads,
dual_cross_attention=dual_cross_attention,
use_linear_projection=use_linear_projection,
only_cross_attention=only_cross_attention,
resnet_time_scale_shift=resnet_time_scale_shift,
)
raise ValueError(f"{up_block_type} is not supported.")
class FourierEmbedder(nn.Module):
def __init__(self, num_freqs=64, temperature=100):
super().__init__()
self.num_freqs = num_freqs
self.temperature = temperature
freq_bands = temperature ** (torch.arange(num_freqs) / num_freqs)
freq_bands = freq_bands[None, None, None]
self.register_buffer("freq_bands", freq_bands, persistent=False)
def __call__(self, x):
x = self.freq_bands * x.unsqueeze(-1)
return torch.stack((x.sin(), x.cos()), dim=-1).permute(0, 1, 3, 4, 2).reshape(*x.shape[:2], -1)
class GLIGENTextBoundingboxProjection(nn.Module):
def __init__(self, positive_len, out_dim, feature_type, fourier_freqs=8):
super().__init__()
self.positive_len = positive_len
self.out_dim = out_dim
self.fourier_embedder = FourierEmbedder(num_freqs=fourier_freqs)
self.position_dim = fourier_freqs * 2 * 4 # 2: sin/cos, 4: xyxy
if isinstance(out_dim, tuple):
out_dim = out_dim[0]
if feature_type == "text-only":
self.linears = nn.Sequential(
nn.Linear(self.positive_len + self.position_dim, 512),
nn.SiLU(),
nn.Linear(512, 512),
nn.SiLU(),
nn.Linear(512, out_dim),
)
self.null_positive_feature = torch.nn.Parameter(torch.zeros([self.positive_len]))
elif feature_type == "text-image":
self.linears_text = nn.Sequential(
nn.Linear(self.positive_len + self.position_dim, 512),
nn.SiLU(),
nn.Linear(512, 512),
nn.SiLU(),
nn.Linear(512, out_dim),
)
self.linears_image = nn.Sequential(
nn.Linear(self.positive_len + self.position_dim, 512),
nn.SiLU(),
nn.Linear(512, 512),
nn.SiLU(),
nn.Linear(512, out_dim),
)
self.null_text_feature = torch.nn.Parameter(torch.zeros([self.positive_len]))
self.null_image_feature = torch.nn.Parameter(torch.zeros([self.positive_len]))
self.null_position_feature = torch.nn.Parameter(torch.zeros([self.position_dim]))
def forward(
self,
boxes,
masks,
positive_embeddings=None,
phrases_masks=None,
image_masks=None,
phrases_embeddings=None,
image_embeddings=None,
):
masks = masks.unsqueeze(-1)
xyxy_embedding = self.fourier_embedder(boxes)
xyxy_null = self.null_position_feature.view(1, 1, -1)
xyxy_embedding = xyxy_embedding * masks + (1 - masks) * xyxy_null
if positive_embeddings:
positive_null = self.null_positive_feature.view(1, 1, -1)
positive_embeddings = positive_embeddings * masks + (1 - masks) * positive_null
objs = self.linears(torch.cat([positive_embeddings, xyxy_embedding], dim=-1))
else:
phrases_masks = phrases_masks.unsqueeze(-1)
image_masks = image_masks.unsqueeze(-1)
text_null = self.null_text_feature.view(1, 1, -1)
image_null = self.null_image_feature.view(1, 1, -1)
phrases_embeddings = phrases_embeddings * phrases_masks + (1 - phrases_masks) * text_null
image_embeddings = image_embeddings * image_masks + (1 - image_masks) * image_null
objs_text = self.linears_text(torch.cat([phrases_embeddings, xyxy_embedding], dim=-1))
objs_image = self.linears_image(torch.cat([image_embeddings, xyxy_embedding], dim=-1))
objs = torch.cat([objs_text, objs_image], dim=1)
return objs
# Copied from diffusers.models.unets.unet_2d_condition.UNet2DConditionModel with UNet2DConditionModel->UNetFlatConditionModel, nn.Conv2d->LinearMultiDim, Block2D->BlockFlat
class UNetFlatConditionModel(ModelMixin, ConfigMixin):
r"""
A conditional 2D UNet model that takes a noisy sample, conditional state, and a timestep and returns a sample
shaped output.
This model inherits from [`ModelMixin`]. Check the superclass documentation for it's generic methods implemented
for all models (such as downloading or saving).
Parameters:
sample_size (`int` or `Tuple[int, int]`, *optional*, defaults to `None`):
Height and width of input/output sample.
in_channels (`int`, *optional*, defaults to 4): Number of channels in the input sample.
out_channels (`int`, *optional*, defaults to 4): Number of channels in the output.
center_input_sample (`bool`, *optional*, defaults to `False`): Whether to center the input sample.
flip_sin_to_cos (`bool`, *optional*, defaults to `False`):
Whether to flip the sin to cos in the time embedding.
freq_shift (`int`, *optional*, defaults to 0): The frequency shift to apply to the time embedding.
down_block_types (`Tuple[str]`, *optional*, defaults to `("CrossAttnDownBlockFlat", "CrossAttnDownBlockFlat", "CrossAttnDownBlockFlat", "DownBlockFlat")`):
The tuple of downsample blocks to use.
mid_block_type (`str`, *optional*, defaults to `"UNetMidBlockFlatCrossAttn"`):
Block type for middle of UNet, it can be one of `UNetMidBlockFlatCrossAttn`, `UNetMidBlockFlat`, or
`UNetMidBlockFlatSimpleCrossAttn`. If `None`, the mid block layer is skipped.
up_block_types (`Tuple[str]`, *optional*, defaults to `("UpBlockFlat", "CrossAttnUpBlockFlat", "CrossAttnUpBlockFlat", "CrossAttnUpBlockFlat")`):
The tuple of upsample blocks to use.
only_cross_attention(`bool` or `Tuple[bool]`, *optional*, default to `False`):
Whether to include self-attention in the basic transformer blocks, see
[`~models.attention.BasicTransformerBlock`].
block_out_channels (`Tuple[int]`, *optional*, defaults to `(320, 640, 1280, 1280)`):
The tuple of output channels for each block.
layers_per_block (`int`, *optional*, defaults to 2): The number of layers per block.
downsample_padding (`int`, *optional*, defaults to 1): The padding to use for the downsampling convolution.
mid_block_scale_factor (`float`, *optional*, defaults to 1.0): The scale factor to use for the mid block.
dropout (`float`, *optional*, defaults to 0.0): The dropout probability to use.
act_fn (`str`, *optional*, defaults to `"silu"`): The activation function to use.
norm_num_groups (`int`, *optional*, defaults to 32): The number of groups to use for the normalization.
If `None`, normalization and activation layers is skipped in post-processing.
norm_eps (`float`, *optional*, defaults to 1e-5): The epsilon to use for the normalization.
cross_attention_dim (`int` or `Tuple[int]`, *optional*, defaults to 1280):
The dimension of the cross attention features.
transformer_layers_per_block (`int`, `Tuple[int]`, or `Tuple[Tuple]` , *optional*, defaults to 1):
The number of transformer blocks of type [`~models.attention.BasicTransformerBlock`]. Only relevant for
[`~models.unet_2d_blocks.CrossAttnDownBlockFlat`], [`~models.unet_2d_blocks.CrossAttnUpBlockFlat`],
[`~models.unet_2d_blocks.UNetMidBlockFlatCrossAttn`].
reverse_transformer_layers_per_block : (`Tuple[Tuple]`, *optional*, defaults to None):
The number of transformer blocks of type [`~models.attention.BasicTransformerBlock`], in the upsampling
blocks of the U-Net. Only relevant if `transformer_layers_per_block` is of type `Tuple[Tuple]` and for
[`~models.unet_2d_blocks.CrossAttnDownBlockFlat`], [`~models.unet_2d_blocks.CrossAttnUpBlockFlat`],
[`~models.unet_2d_blocks.UNetMidBlockFlatCrossAttn`].
encoder_hid_dim (`int`, *optional*, defaults to None):
If `encoder_hid_dim_type` is defined, `encoder_hidden_states` will be projected from `encoder_hid_dim`
dimension to `cross_attention_dim`.
encoder_hid_dim_type (`str`, *optional*, defaults to `None`):
If given, the `encoder_hidden_states` and potentially other embeddings are down-projected to text
embeddings of dimension `cross_attention` according to `encoder_hid_dim_type`.
attention_head_dim (`int`, *optional*, defaults to 8): The dimension of the attention heads.
num_attention_heads (`int`, *optional*):
The number of attention heads. If not defined, defaults to `attention_head_dim`
resnet_time_scale_shift (`str`, *optional*, defaults to `"default"`): Time scale shift config
for ResNet blocks (see [`~models.resnet.ResnetBlockFlat`]). Choose from `default` or `scale_shift`.
class_embed_type (`str`, *optional*, defaults to `None`):
The type of class embedding to use which is ultimately summed with the time embeddings. Choose from `None`,
`"timestep"`, `"identity"`, `"projection"`, or `"simple_projection"`.
addition_embed_type (`str`, *optional*, defaults to `None`):
Configures an optional embedding which will be summed with the time embeddings. Choose from `None` or
"text". "text" will use the `TextTimeEmbedding` layer.
addition_time_embed_dim: (`int`, *optional*, defaults to `None`):
Dimension for the timestep embeddings.
num_class_embeds (`int`, *optional*, defaults to `None`):
Input dimension of the learnable embedding matrix to be projected to `time_embed_dim`, when performing
class conditioning with `class_embed_type` equal to `None`.
time_embedding_type (`str`, *optional*, defaults to `positional`):
The type of position embedding to use for timesteps. Choose from `positional` or `fourier`.
time_embedding_dim (`int`, *optional*, defaults to `None`):
An optional override for the dimension of the projected time embedding.
time_embedding_act_fn (`str`, *optional*, defaults to `None`):
Optional activation function to use only once on the time embeddings before they are passed to the rest of
the UNet. Choose from `silu`, `mish`, `gelu`, and `swish`.
timestep_post_act (`str`, *optional*, defaults to `None`):
The second activation function to use in timestep embedding. Choose from `silu`, `mish` and `gelu`.
time_cond_proj_dim (`int`, *optional*, defaults to `None`):
The dimension of `cond_proj` layer in the timestep embedding.
conv_in_kernel (`int`, *optional*, default to `3`): The kernel size of `conv_in` layer. conv_out_kernel (`int`,
*optional*, default to `3`): The kernel size of `conv_out` layer. projection_class_embeddings_input_dim (`int`,
*optional*): The dimension of the `class_labels` input when
`class_embed_type="projection"`. Required when `class_embed_type="projection"`.
class_embeddings_concat (`bool`, *optional*, defaults to `False`): Whether to concatenate the time
embeddings with the class embeddings.
mid_block_only_cross_attention (`bool`, *optional*, defaults to `None`):
Whether to use cross attention with the mid block when using the `UNetMidBlockFlatSimpleCrossAttn`. If
`only_cross_attention` is given as a single boolean and `mid_block_only_cross_attention` is `None`, the
`only_cross_attention` value is used as the value for `mid_block_only_cross_attention`. Default to `False`
otherwise.
"""
_supports_gradient_checkpointing = True
@register_to_config
def __init__(
self,
sample_size: Optional[int] = None,
in_channels: int = 4,
out_channels: int = 4,
center_input_sample: bool = False,
flip_sin_to_cos: bool = True,
freq_shift: int = 0,
down_block_types: Tuple[str] = (
"CrossAttnDownBlockFlat",
"CrossAttnDownBlockFlat",
"CrossAttnDownBlockFlat",
"DownBlockFlat",
),
mid_block_type: Optional[str] = "UNetMidBlockFlatCrossAttn",
up_block_types: Tuple[str] = (
"UpBlockFlat",
"CrossAttnUpBlockFlat",
"CrossAttnUpBlockFlat",
"CrossAttnUpBlockFlat",
),
only_cross_attention: Union[bool, Tuple[bool]] = False,
block_out_channels: Tuple[int] = (320, 640, 1280, 1280),
layers_per_block: Union[int, Tuple[int]] = 2,
downsample_padding: int = 1,
mid_block_scale_factor: float = 1,
dropout: float = 0.0,
act_fn: str = "silu",
norm_num_groups: Optional[int] = 32,
norm_eps: float = 1e-5,
cross_attention_dim: Union[int, Tuple[int]] = 1280,
transformer_layers_per_block: Union[int, Tuple[int], Tuple[Tuple]] = 1,
reverse_transformer_layers_per_block: Optional[Tuple[Tuple[int]]] = None,
encoder_hid_dim: Optional[int] = None,
encoder_hid_dim_type: Optional[str] = None,
attention_head_dim: Union[int, Tuple[int]] = 8,
num_attention_heads: Optional[Union[int, Tuple[int]]] = None,
dual_cross_attention: bool = False,
use_linear_projection: bool = False,
class_embed_type: Optional[str] = None,
addition_embed_type: Optional[str] = None,
addition_time_embed_dim: Optional[int] = None,
num_class_embeds: Optional[int] = None,
upcast_attention: bool = False,
resnet_time_scale_shift: str = "default",
resnet_skip_time_act: bool = False,
resnet_out_scale_factor: int = 1.0,
time_embedding_type: str = "positional",
time_embedding_dim: Optional[int] = None,
time_embedding_act_fn: Optional[str] = None,
timestep_post_act: Optional[str] = None,
time_cond_proj_dim: Optional[int] = None,
conv_in_kernel: int = 3,
conv_out_kernel: int = 3,
projection_class_embeddings_input_dim: Optional[int] = None,
attention_type: str = "default",
class_embeddings_concat: bool = False,
mid_block_only_cross_attention: Optional[bool] = None,
cross_attention_norm: Optional[str] = None,
addition_embed_type_num_heads=64,
):
super().__init__()
self.sample_size = sample_size
if num_attention_heads is not None:
raise ValueError(
"At the moment it is not possible to define the number of attention heads via `num_attention_heads` because of a naming issue as described in https://github.com/huggingface/diffusers/issues/2011#issuecomment-1547958131. Passing `num_attention_heads` will only be supported in diffusers v0.19."
)
# If `num_attention_heads` is not defined (which is the case for most models)
# it will default to `attention_head_dim`. This looks weird upon first reading it and it is.
# The reason for this behavior is to correct for incorrectly named variables that were introduced
# when this library was created. The incorrect naming was only discovered much later in https://github.com/huggingface/diffusers/issues/2011#issuecomment-1547958131
# Changing `attention_head_dim` to `num_attention_heads` for 40,000+ configurations is too backwards breaking
# which is why we correct for the naming here.
num_attention_heads = num_attention_heads or attention_head_dim
# Check inputs
if len(down_block_types) != len(up_block_types):
raise ValueError(
f"Must provide the same number of `down_block_types` as `up_block_types`. `down_block_types`: {down_block_types}. `up_block_types`: {up_block_types}."
)
if len(block_out_channels) != len(down_block_types):
raise ValueError(
f"Must provide the same number of `block_out_channels` as `down_block_types`. `block_out_channels`: {block_out_channels}. `down_block_types`: {down_block_types}."
)
if not isinstance(only_cross_attention, bool) and len(only_cross_attention) != len(down_block_types):
raise ValueError(
f"Must provide the same number of `only_cross_attention` as `down_block_types`. `only_cross_attention`: {only_cross_attention}. `down_block_types`: {down_block_types}."
)
if not isinstance(num_attention_heads, int) and len(num_attention_heads) != len(down_block_types):
raise ValueError(
f"Must provide the same number of `num_attention_heads` as `down_block_types`. `num_attention_heads`: {num_attention_heads}. `down_block_types`: {down_block_types}."
)
if not isinstance(attention_head_dim, int) and len(attention_head_dim) != len(down_block_types):
raise ValueError(
f"Must provide the same number of `attention_head_dim` as `down_block_types`. `attention_head_dim`: {attention_head_dim}. `down_block_types`: {down_block_types}."
)
if isinstance(cross_attention_dim, list) and len(cross_attention_dim) != len(down_block_types):
raise ValueError(
f"Must provide the same number of `cross_attention_dim` as `down_block_types`. `cross_attention_dim`: {cross_attention_dim}. `down_block_types`: {down_block_types}."
)
if not isinstance(layers_per_block, int) and len(layers_per_block) != len(down_block_types):
raise ValueError(
f"Must provide the same number of `layers_per_block` as `down_block_types`. `layers_per_block`: {layers_per_block}. `down_block_types`: {down_block_types}."
)
if isinstance(transformer_layers_per_block, list) and reverse_transformer_layers_per_block is None:
for layer_number_per_block in transformer_layers_per_block:
if isinstance(layer_number_per_block, list):
raise ValueError("Must provide 'reverse_transformer_layers_per_block` if using asymmetrical UNet.")
# input
conv_in_padding = (conv_in_kernel - 1) // 2
self.conv_in = LinearMultiDim(
in_channels, block_out_channels[0], kernel_size=conv_in_kernel, padding=conv_in_padding
)
# time
if time_embedding_type == "fourier":
time_embed_dim = time_embedding_dim or block_out_channels[0] * 2
if time_embed_dim % 2 != 0:
raise ValueError(f"`time_embed_dim` should be divisible by 2, but is {time_embed_dim}.")
self.time_proj = GaussianFourierProjection(
time_embed_dim // 2, set_W_to_weight=False, log=False, flip_sin_to_cos=flip_sin_to_cos
)
timestep_input_dim = time_embed_dim
elif time_embedding_type == "positional":
time_embed_dim = time_embedding_dim or block_out_channels[0] * 4
self.time_proj = Timesteps(block_out_channels[0], flip_sin_to_cos, freq_shift)
timestep_input_dim = block_out_channels[0]
else:
raise ValueError(
f"{time_embedding_type} does not exist. Please make sure to use one of `fourier` or `positional`."
)
self.time_embedding = TimestepEmbedding(
timestep_input_dim,
time_embed_dim,
act_fn=act_fn,
post_act_fn=timestep_post_act,
cond_proj_dim=time_cond_proj_dim,
)
if encoder_hid_dim_type is None and encoder_hid_dim is not None:
encoder_hid_dim_type = "text_proj"
self.register_to_config(encoder_hid_dim_type=encoder_hid_dim_type)
logger.info("encoder_hid_dim_type defaults to 'text_proj' as `encoder_hid_dim` is defined.")
if encoder_hid_dim is None and encoder_hid_dim_type is not None:
raise ValueError(
f"`encoder_hid_dim` has to be defined when `encoder_hid_dim_type` is set to {encoder_hid_dim_type}."
)
if encoder_hid_dim_type == "text_proj":
self.encoder_hid_proj = nn.Linear(encoder_hid_dim, cross_attention_dim)
elif encoder_hid_dim_type == "text_image_proj":
# image_embed_dim DOESN'T have to be `cross_attention_dim`. To not clutter the __init__ too much
# they are set to `cross_attention_dim` here as this is exactly the required dimension for the currently only use
# case when `addition_embed_type == "text_image_proj"` (Kadinsky 2.1)`
self.encoder_hid_proj = TextImageProjection(
text_embed_dim=encoder_hid_dim,
image_embed_dim=cross_attention_dim,
cross_attention_dim=cross_attention_dim,
)
elif encoder_hid_dim_type == "image_proj":
# Kandinsky 2.2
self.encoder_hid_proj = ImageProjection(
image_embed_dim=encoder_hid_dim,
cross_attention_dim=cross_attention_dim,
)
elif encoder_hid_dim_type is not None:
raise ValueError(
f"encoder_hid_dim_type: {encoder_hid_dim_type} must be None, 'text_proj' or 'text_image_proj'."
)
else:
self.encoder_hid_proj = None
# class embedding
if class_embed_type is None and num_class_embeds is not None:
self.class_embedding = nn.Embedding(num_class_embeds, time_embed_dim)
elif class_embed_type == "timestep":
self.class_embedding = TimestepEmbedding(timestep_input_dim, time_embed_dim, act_fn=act_fn)
elif class_embed_type == "identity":
self.class_embedding = nn.Identity(time_embed_dim, time_embed_dim)
elif class_embed_type == "projection":
if projection_class_embeddings_input_dim is None:
raise ValueError(
"`class_embed_type`: 'projection' requires `projection_class_embeddings_input_dim` be set"
)
# The projection `class_embed_type` is the same as the timestep `class_embed_type` except
# 1. the `class_labels` inputs are not first converted to sinusoidal embeddings
# 2. it projects from an arbitrary input dimension.
#
# Note that `TimestepEmbedding` is quite general, being mainly linear layers and activations.
# When used for embedding actual timesteps, the timesteps are first converted to sinusoidal embeddings.
# As a result, `TimestepEmbedding` can be passed arbitrary vectors.
self.class_embedding = TimestepEmbedding(projection_class_embeddings_input_dim, time_embed_dim)
elif class_embed_type == "simple_projection":
if projection_class_embeddings_input_dim is None:
raise ValueError(
"`class_embed_type`: 'simple_projection' requires `projection_class_embeddings_input_dim` be set"
)
self.class_embedding = nn.Linear(projection_class_embeddings_input_dim, time_embed_dim)
else:
self.class_embedding = None
if addition_embed_type == "text":
if encoder_hid_dim is not None:
text_time_embedding_from_dim = encoder_hid_dim
else:
text_time_embedding_from_dim = cross_attention_dim
self.add_embedding = TextTimeEmbedding(
text_time_embedding_from_dim, time_embed_dim, num_heads=addition_embed_type_num_heads
)
elif addition_embed_type == "text_image":
# text_embed_dim and image_embed_dim DON'T have to be `cross_attention_dim`. To not clutter the __init__ too much
# they are set to `cross_attention_dim` here as this is exactly the required dimension for the currently only use
# case when `addition_embed_type == "text_image"` (Kadinsky 2.1)`
self.add_embedding = TextImageTimeEmbedding(
text_embed_dim=cross_attention_dim, image_embed_dim=cross_attention_dim, time_embed_dim=time_embed_dim
)
elif addition_embed_type == "text_time":
self.add_time_proj = Timesteps(addition_time_embed_dim, flip_sin_to_cos, freq_shift)
self.add_embedding = TimestepEmbedding(projection_class_embeddings_input_dim, time_embed_dim)
elif addition_embed_type == "image":
# Kandinsky 2.2
self.add_embedding = ImageTimeEmbedding(image_embed_dim=encoder_hid_dim, time_embed_dim=time_embed_dim)
elif addition_embed_type == "image_hint":
# Kandinsky 2.2 ControlNet
self.add_embedding = ImageHintTimeEmbedding(image_embed_dim=encoder_hid_dim, time_embed_dim=time_embed_dim)
elif addition_embed_type is not None:
raise ValueError(f"addition_embed_type: {addition_embed_type} must be None, 'text' or 'text_image'.")
if time_embedding_act_fn is None:
self.time_embed_act = None
else:
self.time_embed_act = get_activation(time_embedding_act_fn)
self.down_blocks = nn.ModuleList([])
self.up_blocks = nn.ModuleList([])
if isinstance(only_cross_attention, bool):
if mid_block_only_cross_attention is None:
mid_block_only_cross_attention = only_cross_attention
only_cross_attention = [only_cross_attention] * len(down_block_types)
if mid_block_only_cross_attention is None:
mid_block_only_cross_attention = False
if isinstance(num_attention_heads, int):
num_attention_heads = (num_attention_heads,) * len(down_block_types)
if isinstance(attention_head_dim, int):
attention_head_dim = (attention_head_dim,) * len(down_block_types)
if isinstance(cross_attention_dim, int):
cross_attention_dim = (cross_attention_dim,) * len(down_block_types)
if isinstance(layers_per_block, int):
layers_per_block = [layers_per_block] * len(down_block_types)
if isinstance(transformer_layers_per_block, int):
transformer_layers_per_block = [transformer_layers_per_block] * len(down_block_types)
if class_embeddings_concat:
# The time embeddings are concatenated with the class embeddings. The dimension of the
# time embeddings passed to the down, middle, and up blocks is twice the dimension of the
# regular time embeddings
blocks_time_embed_dim = time_embed_dim * 2
else:
blocks_time_embed_dim = time_embed_dim
# down
output_channel = block_out_channels[0]
for i, down_block_type in enumerate(down_block_types):
input_channel = output_channel
output_channel = block_out_channels[i]
is_final_block = i == len(block_out_channels) - 1
down_block = get_down_block(
down_block_type,
num_layers=layers_per_block[i],
transformer_layers_per_block=transformer_layers_per_block[i],
in_channels=input_channel,
out_channels=output_channel,
temb_channels=blocks_time_embed_dim,
add_downsample=not is_final_block,
resnet_eps=norm_eps,
resnet_act_fn=act_fn,
resnet_groups=norm_num_groups,
cross_attention_dim=cross_attention_dim[i],
num_attention_heads=num_attention_heads[i],
downsample_padding=downsample_padding,
dual_cross_attention=dual_cross_attention,
use_linear_projection=use_linear_projection,
only_cross_attention=only_cross_attention[i],
upcast_attention=upcast_attention,
resnet_time_scale_shift=resnet_time_scale_shift,
attention_type=attention_type,
resnet_skip_time_act=resnet_skip_time_act,
resnet_out_scale_factor=resnet_out_scale_factor,
cross_attention_norm=cross_attention_norm,
attention_head_dim=attention_head_dim[i] if attention_head_dim[i] is not None else output_channel,
dropout=dropout,
)
self.down_blocks.append(down_block)
# mid
if mid_block_type == "UNetMidBlockFlatCrossAttn":
self.mid_block = UNetMidBlockFlatCrossAttn(
transformer_layers_per_block=transformer_layers_per_block[-1],
in_channels=block_out_channels[-1],
temb_channels=blocks_time_embed_dim,
dropout=dropout,
resnet_eps=norm_eps,
resnet_act_fn=act_fn,
output_scale_factor=mid_block_scale_factor,
resnet_time_scale_shift=resnet_time_scale_shift,
cross_attention_dim=cross_attention_dim[-1],
num_attention_heads=num_attention_heads[-1],
resnet_groups=norm_num_groups,
dual_cross_attention=dual_cross_attention,
use_linear_projection=use_linear_projection,
upcast_attention=upcast_attention,
attention_type=attention_type,
)
elif mid_block_type == "UNetMidBlockFlatSimpleCrossAttn":
self.mid_block = UNetMidBlockFlatSimpleCrossAttn(
in_channels=block_out_channels[-1],
temb_channels=blocks_time_embed_dim,
dropout=dropout,
resnet_eps=norm_eps,
resnet_act_fn=act_fn,
output_scale_factor=mid_block_scale_factor,
cross_attention_dim=cross_attention_dim[-1],
attention_head_dim=attention_head_dim[-1],
resnet_groups=norm_num_groups,
resnet_time_scale_shift=resnet_time_scale_shift,
skip_time_act=resnet_skip_time_act,
only_cross_attention=mid_block_only_cross_attention,
cross_attention_norm=cross_attention_norm,
)
elif mid_block_type == "UNetMidBlockFlat":
self.mid_block = UNetMidBlockFlat(
in_channels=block_out_channels[-1],
temb_channels=blocks_time_embed_dim,
dropout=dropout,
num_layers=0,
resnet_eps=norm_eps,
resnet_act_fn=act_fn,
output_scale_factor=mid_block_scale_factor,
resnet_groups=norm_num_groups,
resnet_time_scale_shift=resnet_time_scale_shift,
add_attention=False,
)
elif mid_block_type is None:
self.mid_block = None
else:
raise ValueError(f"unknown mid_block_type : {mid_block_type}")
# count how many layers upsample the images
self.num_upsamplers = 0
# up
reversed_block_out_channels = list(reversed(block_out_channels))
reversed_num_attention_heads = list(reversed(num_attention_heads))
reversed_layers_per_block = list(reversed(layers_per_block))
reversed_cross_attention_dim = list(reversed(cross_attention_dim))
reversed_transformer_layers_per_block = (
list(reversed(transformer_layers_per_block))
if reverse_transformer_layers_per_block is None
else reverse_transformer_layers_per_block
)
only_cross_attention = list(reversed(only_cross_attention))
output_channel = reversed_block_out_channels[0]
for i, up_block_type in enumerate(up_block_types):
is_final_block = i == len(block_out_channels) - 1
prev_output_channel = output_channel
output_channel = reversed_block_out_channels[i]
input_channel = reversed_block_out_channels[min(i + 1, len(block_out_channels) - 1)]
# add upsample block for all BUT final layer
if not is_final_block:
add_upsample = True
self.num_upsamplers += 1
else:
add_upsample = False
up_block = get_up_block(
up_block_type,
num_layers=reversed_layers_per_block[i] + 1,
transformer_layers_per_block=reversed_transformer_layers_per_block[i],
in_channels=input_channel,
out_channels=output_channel,
prev_output_channel=prev_output_channel,
temb_channels=blocks_time_embed_dim,
add_upsample=add_upsample,
resnet_eps=norm_eps,
resnet_act_fn=act_fn,
resolution_idx=i,
resnet_groups=norm_num_groups,
cross_attention_dim=reversed_cross_attention_dim[i],
num_attention_heads=reversed_num_attention_heads[i],
dual_cross_attention=dual_cross_attention,
use_linear_projection=use_linear_projection,
only_cross_attention=only_cross_attention[i],
upcast_attention=upcast_attention,
resnet_time_scale_shift=resnet_time_scale_shift,
attention_type=attention_type,
resnet_skip_time_act=resnet_skip_time_act,
resnet_out_scale_factor=resnet_out_scale_factor,
cross_attention_norm=cross_attention_norm,
attention_head_dim=attention_head_dim[i] if attention_head_dim[i] is not None else output_channel,
dropout=dropout,
)
self.up_blocks.append(up_block)
prev_output_channel = output_channel
# out
if norm_num_groups is not None:
self.conv_norm_out = nn.GroupNorm(
num_channels=block_out_channels[0], num_groups=norm_num_groups, eps=norm_eps
)
self.conv_act = get_activation(act_fn)
else:
self.conv_norm_out = None
self.conv_act = None
conv_out_padding = (conv_out_kernel - 1) // 2
self.conv_out = LinearMultiDim(
block_out_channels[0], out_channels, kernel_size=conv_out_kernel, padding=conv_out_padding
)
if attention_type in ["gated", "gated-text-image"]:
positive_len = 768
if isinstance(cross_attention_dim, int):
positive_len = cross_attention_dim
elif isinstance(cross_attention_dim, tuple) or isinstance(cross_attention_dim, list):
positive_len = cross_attention_dim[0]
feature_type = "text-only" if attention_type == "gated" else "text-image"
self.position_net = GLIGENTextBoundingboxProjection(
positive_len=positive_len, out_dim=cross_attention_dim, feature_type=feature_type
)
@property
def attn_processors(self) -> Dict[str, AttentionProcessor]:
r"""
Returns:
`dict` of attention processors: A dictionary containing all attention processors used in the model with
indexed by its weight name.
"""
# set recursively
processors = {}
def fn_recursive_add_processors(name: str, module: torch.nn.Module, processors: Dict[str, AttentionProcessor]):
if hasattr(module, "get_processor"):
processors[f"{name}.processor"] = module.get_processor(return_deprecated_lora=True)
for sub_name, child in module.named_children():
fn_recursive_add_processors(f"{name}.{sub_name}", child, processors)
return processors
for name, module in self.named_children():
fn_recursive_add_processors(name, module, processors)
return processors
def set_attn_processor(self, processor: Union[AttentionProcessor, Dict[str, AttentionProcessor]]):
r"""
Sets the attention processor to use to compute attention.
Parameters:
processor (`dict` of `AttentionProcessor` or only `AttentionProcessor`):
The instantiated processor class or a dictionary of processor classes that will be set as the processor
for **all** `Attention` layers.
If `processor` is a dict, the key needs to define the path to the corresponding cross attention
processor. This is strongly recommended when setting trainable attention processors.
"""
count = len(self.attn_processors.keys())
if isinstance(processor, dict) and len(processor) != count:
raise ValueError(
f"A dict of processors was passed, but the number of processors {len(processor)} does not match the"
f" number of attention layers: {count}. Please make sure to pass {count} processor classes."
)
def fn_recursive_attn_processor(name: str, module: torch.nn.Module, processor):
if hasattr(module, "set_processor"):
if not isinstance(processor, dict):
module.set_processor(processor)
else:
module.set_processor(processor.pop(f"{name}.processor"))
for sub_name, child in module.named_children():
fn_recursive_attn_processor(f"{name}.{sub_name}", child, processor)
for name, module in self.named_children():
fn_recursive_attn_processor(name, module, processor)
def set_default_attn_processor(self):
"""
Disables custom attention processors and sets the default attention implementation.
"""
if all(proc.__class__ in ADDED_KV_ATTENTION_PROCESSORS for proc in self.attn_processors.values()):
processor = AttnAddedKVProcessor()
elif all(proc.__class__ in CROSS_ATTENTION_PROCESSORS for proc in self.attn_processors.values()):
processor = AttnProcessor()
else:
raise ValueError(
f"Cannot call `set_default_attn_processor` when attention processors are of type {next(iter(self.attn_processors.values()))}"
)
self.set_attn_processor(processor)
def set_attention_slice(self, slice_size):
r"""
Enable sliced attention computation.
When this option is enabled, the attention module splits the input tensor in slices to compute attention in
several steps. This is useful for saving some memory in exchange for a small decrease in speed.
Args:
slice_size (`str` or `int` or `list(int)`, *optional*, defaults to `"auto"`):
When `"auto"`, input to the attention heads is halved, so attention is computed in two steps. If
`"max"`, maximum amount of memory is saved by running only one slice at a time. If a number is
provided, uses as many slices as `attention_head_dim // slice_size`. In this case, `attention_head_dim`
must be a multiple of `slice_size`.
"""
sliceable_head_dims = []
def fn_recursive_retrieve_sliceable_dims(module: torch.nn.Module):
if hasattr(module, "set_attention_slice"):
sliceable_head_dims.append(module.sliceable_head_dim)
for child in module.children():
fn_recursive_retrieve_sliceable_dims(child)
# retrieve number of attention layers
for module in self.children():
fn_recursive_retrieve_sliceable_dims(module)
num_sliceable_layers = len(sliceable_head_dims)
if slice_size == "auto":
# half the attention head size is usually a good trade-off between
# speed and memory
slice_size = [dim // 2 for dim in sliceable_head_dims]
elif slice_size == "max":
# make smallest slice possible
slice_size = num_sliceable_layers * [1]
slice_size = num_sliceable_layers * [slice_size] if not isinstance(slice_size, list) else slice_size
if len(slice_size) != len(sliceable_head_dims):
raise ValueError(
f"You have provided {len(slice_size)}, but {self.config} has {len(sliceable_head_dims)} different"
f" attention layers. Make sure to match `len(slice_size)` to be {len(sliceable_head_dims)}."
)
for i in range(len(slice_size)):
size = slice_size[i]
dim = sliceable_head_dims[i]
if size is not None and size > dim:
raise ValueError(f"size {size} has to be smaller or equal to {dim}.")
# Recursively walk through all the children.
# Any children which exposes the set_attention_slice method
# gets the message
def fn_recursive_set_attention_slice(module: torch.nn.Module, slice_size: List[int]):
if hasattr(module, "set_attention_slice"):
module.set_attention_slice(slice_size.pop())
for child in module.children():
fn_recursive_set_attention_slice(child, slice_size)
reversed_slice_size = list(reversed(slice_size))
for module in self.children():
fn_recursive_set_attention_slice(module, reversed_slice_size)
def _set_gradient_checkpointing(self, module, value=False):
if hasattr(module, "gradient_checkpointing"):
module.gradient_checkpointing = value
def enable_freeu(self, s1, s2, b1, b2):
r"""Enables the FreeU mechanism from https://arxiv.org/abs/2309.11497.
The suffixes after the scaling factors represent the stage blocks where they are being applied.
Please refer to the [official repository](https://github.com/ChenyangSi/FreeU) for combinations of values that
are known to work well for different pipelines such as Stable Diffusion v1, v2, and Stable Diffusion XL.
Args:
s1 (`float`):
Scaling factor for stage 1 to attenuate the contributions of the skip features. This is done to
mitigate the "oversmoothing effect" in the enhanced denoising process.
s2 (`float`):
Scaling factor for stage 2 to attenuate the contributions of the skip features. This is done to
mitigate the "oversmoothing effect" in the enhanced denoising process.
b1 (`float`): Scaling factor for stage 1 to amplify the contributions of backbone features.
b2 (`float`): Scaling factor for stage 2 to amplify the contributions of backbone features.
"""
for i, upsample_block in enumerate(self.up_blocks):
setattr(upsample_block, "s1", s1)
setattr(upsample_block, "s2", s2)
setattr(upsample_block, "b1", b1)
setattr(upsample_block, "b2", b2)
def disable_freeu(self):
"""Disables the FreeU mechanism."""
freeu_keys = {"s1", "s2", "b1", "b2"}
for i, upsample_block in enumerate(self.up_blocks):
for k in freeu_keys:
if hasattr(upsample_block, k) or getattr(upsample_block, k, None) is not None:
setattr(upsample_block, k, None)
def fuse_qkv_projections(self):
"""
Enables fused QKV projections. For self-attention modules, all projection matrices (i.e., query,
key, value) are fused. For cross-attention modules, key and value projection matrices are fused.
<Tip warning={true}>
This API is 🧪 experimental.
</Tip>
"""
self.original_attn_processors = None
for _, attn_processor in self.attn_processors.items():
if "Added" in str(attn_processor.__class__.__name__):
raise ValueError("`fuse_qkv_projections()` is not supported for models having added KV projections.")
self.original_attn_processors = self.attn_processors
for module in self.modules():
if isinstance(module, Attention):
module.fuse_projections(fuse=True)
def unfuse_qkv_projections(self):
"""Disables the fused QKV projection if enabled.
<Tip warning={true}>
This API is 🧪 experimental.
</Tip>
"""
if self.original_attn_processors is not None:
self.set_attn_processor(self.original_attn_processors)
def unload_lora(self):
"""Unloads LoRA weights."""
deprecate(
"unload_lora",
"0.28.0",
"Calling `unload_lora()` is deprecated and will be removed in a future version. Please install `peft` and then call `disable_adapters().",
)
for module in self.modules():
if hasattr(module, "set_lora_layer"):
module.set_lora_layer(None)
def forward(
self,
sample: torch.FloatTensor,
timestep: Union[torch.Tensor, float, int],
encoder_hidden_states: torch.Tensor,
class_labels: Optional[torch.Tensor] = None,
timestep_cond: Optional[torch.Tensor] = None,
attention_mask: Optional[torch.Tensor] = None,
cross_attention_kwargs: Optional[Dict[str, Any]] = None,
added_cond_kwargs: Optional[Dict[str, torch.Tensor]] = None,
down_block_additional_residuals: Optional[Tuple[torch.Tensor]] = None,
mid_block_additional_residual: Optional[torch.Tensor] = None,
down_intrablock_additional_residuals: Optional[Tuple[torch.Tensor]] = None,
encoder_attention_mask: Optional[torch.Tensor] = None,
return_dict: bool = True,
) -> Union[UNet2DConditionOutput, Tuple]:
r"""
The [`UNetFlatConditionModel`] forward method.
Args:
sample (`torch.FloatTensor`):
The noisy input tensor with the following shape `(batch, channel, height, width)`.
timestep (`torch.FloatTensor` or `float` or `int`): The number of timesteps to denoise an input.
encoder_hidden_states (`torch.FloatTensor`):
The encoder hidden states with shape `(batch, sequence_length, feature_dim)`.
class_labels (`torch.Tensor`, *optional*, defaults to `None`):
Optional class labels for conditioning. Their embeddings will be summed with the timestep embeddings.
timestep_cond: (`torch.Tensor`, *optional*, defaults to `None`):
Conditional embeddings for timestep. If provided, the embeddings will be summed with the samples passed
through the `self.time_embedding` layer to obtain the timestep embeddings.
attention_mask (`torch.Tensor`, *optional*, defaults to `None`):
An attention mask of shape `(batch, key_tokens)` is applied to `encoder_hidden_states`. If `1` the mask
is kept, otherwise if `0` it is discarded. Mask will be converted into a bias, which adds large
negative values to the attention scores corresponding to "discard" tokens.
cross_attention_kwargs (`dict`, *optional*):
A kwargs dictionary that if specified is passed along to the `AttentionProcessor` as defined under
`self.processor` in
[diffusers.models.attention_processor](https://github.com/huggingface/diffusers/blob/main/src/diffusers/models/attention_processor.py).
added_cond_kwargs: (`dict`, *optional*):
A kwargs dictionary containing additional embeddings that if specified are added to the embeddings that
are passed along to the UNet blocks.
down_block_additional_residuals: (`tuple` of `torch.Tensor`, *optional*):
A tuple of tensors that if specified are added to the residuals of down unet blocks.
mid_block_additional_residual: (`torch.Tensor`, *optional*):
A tensor that if specified is added to the residual of the middle unet block.
encoder_attention_mask (`torch.Tensor`):
A cross-attention mask of shape `(batch, sequence_length)` is applied to `encoder_hidden_states`. If
`True` the mask is kept, otherwise if `False` it is discarded. Mask will be converted into a bias,
which adds large negative values to the attention scores corresponding to "discard" tokens.
return_dict (`bool`, *optional*, defaults to `True`):
Whether or not to return a [`~models.unets.unet_2d_condition.UNet2DConditionOutput`] instead of a plain
tuple.
cross_attention_kwargs (`dict`, *optional*):
A kwargs dictionary that if specified is passed along to the [`AttnProcessor`].
added_cond_kwargs: (`dict`, *optional*):
A kwargs dictionary containin additional embeddings that if specified are added to the embeddings that
are passed along to the UNet blocks.
down_block_additional_residuals (`tuple` of `torch.Tensor`, *optional*):
additional residuals to be added to UNet long skip connections from down blocks to up blocks for
example from ControlNet side model(s)
mid_block_additional_residual (`torch.Tensor`, *optional*):
additional residual to be added to UNet mid block output, for example from ControlNet side model
down_intrablock_additional_residuals (`tuple` of `torch.Tensor`, *optional*):
additional residuals to be added within UNet down blocks, for example from T2I-Adapter side model(s)
Returns:
[`~models.unets.unet_2d_condition.UNet2DConditionOutput`] or `tuple`:
If `return_dict` is True, an [`~models.unets.unet_2d_condition.UNet2DConditionOutput`] is returned, otherwise
a `tuple` is returned where the first element is the sample tensor.
"""
# By default samples have to be AT least a multiple of the overall upsampling factor.
# The overall upsampling factor is equal to 2 ** (# num of upsampling layers).
# However, the upsampling interpolation output size can be forced to fit any upsampling size
# on the fly if necessary.
default_overall_up_factor = 2**self.num_upsamplers
# upsample size should be forwarded when sample is not a multiple of `default_overall_up_factor`
forward_upsample_size = False
upsample_size = None
for dim in sample.shape[-2:]:
if dim % default_overall_up_factor != 0:
# Forward upsample size to force interpolation output size.
forward_upsample_size = True
break
# ensure attention_mask is a bias, and give it a singleton query_tokens dimension
# expects mask of shape:
# [batch, key_tokens]
# adds singleton query_tokens dimension:
# [batch, 1, key_tokens]
# this helps to broadcast it as a bias over attention scores, which will be in one of the following shapes:
# [batch, heads, query_tokens, key_tokens] (e.g. torch sdp attn)
# [batch * heads, query_tokens, key_tokens] (e.g. xformers or classic attn)
if attention_mask is not None:
# assume that mask is expressed as:
# (1 = keep, 0 = discard)
# convert mask into a bias that can be added to attention scores:
# (keep = +0, discard = -10000.0)
attention_mask = (1 - attention_mask.to(sample.dtype)) * -10000.0
attention_mask = attention_mask.unsqueeze(1)
# convert encoder_attention_mask to a bias the same way we do for attention_mask
if encoder_attention_mask is not None:
encoder_attention_mask = (1 - encoder_attention_mask.to(sample.dtype)) * -10000.0
encoder_attention_mask = encoder_attention_mask.unsqueeze(1)
# 0. center input if necessary
if self.config.center_input_sample:
sample = 2 * sample - 1.0
# 1. time
timesteps = timestep
if not torch.is_tensor(timesteps):
# TODO: this requires sync between CPU and GPU. So try to pass timesteps as tensors if you can
# This would be a good case for the `match` statement (Python 3.10+)
is_mps = sample.device.type == "mps"
if isinstance(timestep, float):
dtype = torch.float32 if is_mps else torch.float64
else:
dtype = torch.int32 if is_mps else torch.int64
timesteps = torch.tensor([timesteps], dtype=dtype, device=sample.device)
elif len(timesteps.shape) == 0:
timesteps = timesteps[None].to(sample.device)
# broadcast to batch dimension in a way that's compatible with ONNX/Core ML
timesteps = timesteps.expand(sample.shape[0])
t_emb = self.time_proj(timesteps)
# `Timesteps` does not contain any weights and will always return f32 tensors
# but time_embedding might actually be running in fp16. so we need to cast here.
# there might be better ways to encapsulate this.
t_emb = t_emb.to(dtype=sample.dtype)
emb = self.time_embedding(t_emb, timestep_cond)
aug_emb = None
if self.class_embedding is not None:
if class_labels is None:
raise ValueError("class_labels should be provided when num_class_embeds > 0")
if self.config.class_embed_type == "timestep":
class_labels = self.time_proj(class_labels)
# `Timesteps` does not contain any weights and will always return f32 tensors
# there might be better ways to encapsulate this.
class_labels = class_labels.to(dtype=sample.dtype)
class_emb = self.class_embedding(class_labels).to(dtype=sample.dtype)
if self.config.class_embeddings_concat:
emb = torch.cat([emb, class_emb], dim=-1)
else:
emb = emb + class_emb
if self.config.addition_embed_type == "text":
aug_emb = self.add_embedding(encoder_hidden_states)
elif self.config.addition_embed_type == "text_image":
# Kandinsky 2.1 - style
if "image_embeds" not in added_cond_kwargs:
raise ValueError(
f"{self.__class__} has the config param `addition_embed_type` set to 'text_image' which requires the keyword argument `image_embeds` to be passed in `added_cond_kwargs`"
)
image_embs = added_cond_kwargs.get("image_embeds")
text_embs = added_cond_kwargs.get("text_embeds", encoder_hidden_states)
aug_emb = self.add_embedding(text_embs, image_embs)
elif self.config.addition_embed_type == "text_time":
# SDXL - style
if "text_embeds" not in added_cond_kwargs:
raise ValueError(
f"{self.__class__} has the config param `addition_embed_type` set to 'text_time' which requires the keyword argument `text_embeds` to be passed in `added_cond_kwargs`"
)
text_embeds = added_cond_kwargs.get("text_embeds")
if "time_ids" not in added_cond_kwargs:
raise ValueError(
f"{self.__class__} has the config param `addition_embed_type` set to 'text_time' which requires the keyword argument `time_ids` to be passed in `added_cond_kwargs`"
)
time_ids = added_cond_kwargs.get("time_ids")
time_embeds = self.add_time_proj(time_ids.flatten())
time_embeds = time_embeds.reshape((text_embeds.shape[0], -1))
add_embeds = torch.concat([text_embeds, time_embeds], dim=-1)
add_embeds = add_embeds.to(emb.dtype)
aug_emb = self.add_embedding(add_embeds)
elif self.config.addition_embed_type == "image":
# Kandinsky 2.2 - style
if "image_embeds" not in added_cond_kwargs:
raise ValueError(
f"{self.__class__} has the config param `addition_embed_type` set to 'image' which requires the keyword argument `image_embeds` to be passed in `added_cond_kwargs`"
)
image_embs = added_cond_kwargs.get("image_embeds")
aug_emb = self.add_embedding(image_embs)
elif self.config.addition_embed_type == "image_hint":
# Kandinsky 2.2 - style
if "image_embeds" not in added_cond_kwargs or "hint" not in added_cond_kwargs:
raise ValueError(
f"{self.__class__} has the config param `addition_embed_type` set to 'image_hint' which requires the keyword arguments `image_embeds` and `hint` to be passed in `added_cond_kwargs`"
)
image_embs = added_cond_kwargs.get("image_embeds")
hint = added_cond_kwargs.get("hint")
aug_emb, hint = self.add_embedding(image_embs, hint)
sample = torch.cat([sample, hint], dim=1)
emb = emb + aug_emb if aug_emb is not None else emb
if self.time_embed_act is not None:
emb = self.time_embed_act(emb)
if self.encoder_hid_proj is not None and self.config.encoder_hid_dim_type == "text_proj":
encoder_hidden_states = self.encoder_hid_proj(encoder_hidden_states)
elif self.encoder_hid_proj is not None and self.config.encoder_hid_dim_type == "text_image_proj":
# Kadinsky 2.1 - style
if "image_embeds" not in added_cond_kwargs:
raise ValueError(
f"{self.__class__} has the config param `encoder_hid_dim_type` set to 'text_image_proj' which requires the keyword argument `image_embeds` to be passed in `added_conditions`"
)
image_embeds = added_cond_kwargs.get("image_embeds")
encoder_hidden_states = self.encoder_hid_proj(encoder_hidden_states, image_embeds)
elif self.encoder_hid_proj is not None and self.config.encoder_hid_dim_type == "image_proj":
# Kandinsky 2.2 - style
if "image_embeds" not in added_cond_kwargs:
raise ValueError(
f"{self.__class__} has the config param `encoder_hid_dim_type` set to 'image_proj' which requires the keyword argument `image_embeds` to be passed in `added_conditions`"
)
image_embeds = added_cond_kwargs.get("image_embeds")
encoder_hidden_states = self.encoder_hid_proj(image_embeds)
elif self.encoder_hid_proj is not None and self.config.encoder_hid_dim_type == "ip_image_proj":
if "image_embeds" not in added_cond_kwargs:
raise ValueError(
f"{self.__class__} has the config param `encoder_hid_dim_type` set to 'ip_image_proj' which requires the keyword argument `image_embeds` to be passed in `added_conditions`"
)
image_embeds = added_cond_kwargs.get("image_embeds")
image_embeds = self.encoder_hid_proj(image_embeds)
encoder_hidden_states = (encoder_hidden_states, image_embeds)
# 2. pre-process
sample = self.conv_in(sample)
# 2.5 GLIGEN position net
if cross_attention_kwargs is not None and cross_attention_kwargs.get("gligen", None) is not None:
cross_attention_kwargs = cross_attention_kwargs.copy()
gligen_args = cross_attention_kwargs.pop("gligen")
cross_attention_kwargs["gligen"] = {"objs": self.position_net(**gligen_args)}
# 3. down
lora_scale = cross_attention_kwargs.get("scale", 1.0) if cross_attention_kwargs is not None else 1.0
if USE_PEFT_BACKEND:
# weight the lora layers by setting `lora_scale` for each PEFT layer
scale_lora_layers(self, lora_scale)
is_controlnet = mid_block_additional_residual is not None and down_block_additional_residuals is not None
# using new arg down_intrablock_additional_residuals for T2I-Adapters, to distinguish from controlnets
is_adapter = down_intrablock_additional_residuals is not None
# maintain backward compatibility for legacy usage, where
# T2I-Adapter and ControlNet both use down_block_additional_residuals arg
# but can only use one or the other
if not is_adapter and mid_block_additional_residual is None and down_block_additional_residuals is not None:
deprecate(
"T2I should not use down_block_additional_residuals",
"1.3.0",
"Passing intrablock residual connections with `down_block_additional_residuals` is deprecated \
and will be removed in diffusers 1.3.0. `down_block_additional_residuals` should only be used \
for ControlNet. Please make sure use `down_intrablock_additional_residuals` instead. ",
standard_warn=False,
)
down_intrablock_additional_residuals = down_block_additional_residuals
is_adapter = True
down_block_res_samples = (sample,)
for downsample_block in self.down_blocks:
if hasattr(downsample_block, "has_cross_attention") and downsample_block.has_cross_attention:
# For t2i-adapter CrossAttnDownBlockFlat
additional_residuals = {}
if is_adapter and len(down_intrablock_additional_residuals) > 0:
additional_residuals["additional_residuals"] = down_intrablock_additional_residuals.pop(0)
sample, res_samples = downsample_block(
hidden_states=sample,
temb=emb,
encoder_hidden_states=encoder_hidden_states,
attention_mask=attention_mask,
cross_attention_kwargs=cross_attention_kwargs,
encoder_attention_mask=encoder_attention_mask,
**additional_residuals,
)
else:
sample, res_samples = downsample_block(hidden_states=sample, temb=emb, scale=lora_scale)
if is_adapter and len(down_intrablock_additional_residuals) > 0:
sample += down_intrablock_additional_residuals.pop(0)
down_block_res_samples += res_samples
if is_controlnet:
new_down_block_res_samples = ()
for down_block_res_sample, down_block_additional_residual in zip(
down_block_res_samples, down_block_additional_residuals
):
down_block_res_sample = down_block_res_sample + down_block_additional_residual
new_down_block_res_samples = new_down_block_res_samples + (down_block_res_sample,)
down_block_res_samples = new_down_block_res_samples
# 4. mid
if self.mid_block is not None:
if hasattr(self.mid_block, "has_cross_attention") and self.mid_block.has_cross_attention:
sample = self.mid_block(
sample,
emb,
encoder_hidden_states=encoder_hidden_states,
attention_mask=attention_mask,
cross_attention_kwargs=cross_attention_kwargs,
encoder_attention_mask=encoder_attention_mask,
)
else:
sample = self.mid_block(sample, emb)
# To support T2I-Adapter-XL
if (
is_adapter
and len(down_intrablock_additional_residuals) > 0
and sample.shape == down_intrablock_additional_residuals[0].shape
):
sample += down_intrablock_additional_residuals.pop(0)
if is_controlnet:
sample = sample + mid_block_additional_residual
# 5. up
for i, upsample_block in enumerate(self.up_blocks):
is_final_block = i == len(self.up_blocks) - 1
res_samples = down_block_res_samples[-len(upsample_block.resnets) :]
down_block_res_samples = down_block_res_samples[: -len(upsample_block.resnets)]
# if we have not reached the final block and need to forward the
# upsample size, we do it here
if not is_final_block and forward_upsample_size:
upsample_size = down_block_res_samples[-1].shape[2:]
if hasattr(upsample_block, "has_cross_attention") and upsample_block.has_cross_attention:
sample = upsample_block(
hidden_states=sample,
temb=emb,
res_hidden_states_tuple=res_samples,
encoder_hidden_states=encoder_hidden_states,
cross_attention_kwargs=cross_attention_kwargs,
upsample_size=upsample_size,
attention_mask=attention_mask,
encoder_attention_mask=encoder_attention_mask,
)
else:
sample = upsample_block(
hidden_states=sample,
temb=emb,
res_hidden_states_tuple=res_samples,
upsample_size=upsample_size,
scale=lora_scale,
)
# 6. post-process
if self.conv_norm_out:
sample = self.conv_norm_out(sample)
sample = self.conv_act(sample)
sample = self.conv_out(sample)
if USE_PEFT_BACKEND:
# remove `lora_scale` from each PEFT layer
unscale_lora_layers(self, lora_scale)
if not return_dict:
return (sample,)
return UNet2DConditionOutput(sample=sample)
class LinearMultiDim(nn.Linear):
def __init__(self, in_features, out_features=None, second_dim=4, *args, **kwargs):
in_features = [in_features, second_dim, 1] if isinstance(in_features, int) else list(in_features)
if out_features is None:
out_features = in_features
out_features = [out_features, second_dim, 1] if isinstance(out_features, int) else list(out_features)
self.in_features_multidim = in_features
self.out_features_multidim = out_features
super().__init__(np.array(in_features).prod(), np.array(out_features).prod())
def forward(self, input_tensor, *args, **kwargs):
shape = input_tensor.shape
n_dim = len(self.in_features_multidim)
input_tensor = input_tensor.reshape(*shape[0:-n_dim], self.in_features)
output_tensor = super().forward(input_tensor)
output_tensor = output_tensor.view(*shape[0:-n_dim], *self.out_features_multidim)
return output_tensor
class ResnetBlockFlat(nn.Module):
def __init__(
self,
*,
in_channels,
out_channels=None,
dropout=0.0,
temb_channels=512,
groups=32,
groups_out=None,
pre_norm=True,
eps=1e-6,
time_embedding_norm="default",
use_in_shortcut=None,
second_dim=4,
**kwargs,
):
super().__init__()
self.pre_norm = pre_norm
self.pre_norm = True
in_channels = [in_channels, second_dim, 1] if isinstance(in_channels, int) else list(in_channels)
self.in_channels_prod = np.array(in_channels).prod()
self.channels_multidim = in_channels
if out_channels is not None:
out_channels = [out_channels, second_dim, 1] if isinstance(out_channels, int) else list(out_channels)
out_channels_prod = np.array(out_channels).prod()
self.out_channels_multidim = out_channels
else:
out_channels_prod = self.in_channels_prod
self.out_channels_multidim = self.channels_multidim
self.time_embedding_norm = time_embedding_norm
if groups_out is None:
groups_out = groups
self.norm1 = torch.nn.GroupNorm(num_groups=groups, num_channels=self.in_channels_prod, eps=eps, affine=True)
self.conv1 = torch.nn.Conv2d(self.in_channels_prod, out_channels_prod, kernel_size=1, padding=0)
if temb_channels is not None:
self.time_emb_proj = torch.nn.Linear(temb_channels, out_channels_prod)
else:
self.time_emb_proj = None
self.norm2 = torch.nn.GroupNorm(num_groups=groups_out, num_channels=out_channels_prod, eps=eps, affine=True)
self.dropout = torch.nn.Dropout(dropout)
self.conv2 = torch.nn.Conv2d(out_channels_prod, out_channels_prod, kernel_size=1, padding=0)
self.nonlinearity = nn.SiLU()
self.use_in_shortcut = (
self.in_channels_prod != out_channels_prod if use_in_shortcut is None else use_in_shortcut
)
self.conv_shortcut = None
if self.use_in_shortcut:
self.conv_shortcut = torch.nn.Conv2d(
self.in_channels_prod, out_channels_prod, kernel_size=1, stride=1, padding=0
)
def forward(self, input_tensor, temb):
shape = input_tensor.shape
n_dim = len(self.channels_multidim)
input_tensor = input_tensor.reshape(*shape[0:-n_dim], self.in_channels_prod, 1, 1)
input_tensor = input_tensor.view(-1, self.in_channels_prod, 1, 1)
hidden_states = input_tensor
hidden_states = self.norm1(hidden_states)
hidden_states = self.nonlinearity(hidden_states)
hidden_states = self.conv1(hidden_states)
if temb is not None:
temb = self.time_emb_proj(self.nonlinearity(temb))[:, :, None, None]
hidden_states = hidden_states + temb
hidden_states = self.norm2(hidden_states)
hidden_states = self.nonlinearity(hidden_states)
hidden_states = self.dropout(hidden_states)
hidden_states = self.conv2(hidden_states)
if self.conv_shortcut is not None:
input_tensor = self.conv_shortcut(input_tensor)
output_tensor = input_tensor + hidden_states
output_tensor = output_tensor.view(*shape[0:-n_dim], -1)
output_tensor = output_tensor.view(*shape[0:-n_dim], *self.out_channels_multidim)
return output_tensor
class DownBlockFlat(nn.Module):
def __init__(
self,
in_channels: int,
out_channels: int,
temb_channels: int,
dropout: float = 0.0,
num_layers: int = 1,
resnet_eps: float = 1e-6,
resnet_time_scale_shift: str = "default",
resnet_act_fn: str = "swish",
resnet_groups: int = 32,
resnet_pre_norm: bool = True,
output_scale_factor: float = 1.0,
add_downsample: bool = True,
downsample_padding: int = 1,
):
super().__init__()
resnets = []
for i in range(num_layers):
in_channels = in_channels if i == 0 else out_channels
resnets.append(
ResnetBlockFlat(
in_channels=in_channels,
out_channels=out_channels,
temb_channels=temb_channels,
eps=resnet_eps,
groups=resnet_groups,
dropout=dropout,
time_embedding_norm=resnet_time_scale_shift,
non_linearity=resnet_act_fn,
output_scale_factor=output_scale_factor,
pre_norm=resnet_pre_norm,
)
)
self.resnets = nn.ModuleList(resnets)
if add_downsample:
self.downsamplers = nn.ModuleList(
[
LinearMultiDim(
out_channels, use_conv=True, out_channels=out_channels, padding=downsample_padding, name="op"
)
]
)
else:
self.downsamplers = None
self.gradient_checkpointing = False
def forward(
self, hidden_states: torch.FloatTensor, temb: Optional[torch.FloatTensor] = None, scale: float = 1.0
) -> Tuple[torch.FloatTensor, Tuple[torch.FloatTensor, ...]]:
output_states = ()
for resnet in self.resnets:
if self.training and self.gradient_checkpointing:
def create_custom_forward(module):
def custom_forward(*inputs):
return module(*inputs)
return custom_forward
if is_torch_version(">=", "1.11.0"):
hidden_states = torch.utils.checkpoint.checkpoint(
create_custom_forward(resnet), hidden_states, temb, use_reentrant=False
)
else:
hidden_states = torch.utils.checkpoint.checkpoint(
create_custom_forward(resnet), hidden_states, temb
)
else:
hidden_states = resnet(hidden_states, temb, scale=scale)
output_states = output_states + (hidden_states,)
if self.downsamplers is not None:
for downsampler in self.downsamplers:
hidden_states = downsampler(hidden_states, scale=scale)
output_states = output_states + (hidden_states,)
return hidden_states, output_states
class CrossAttnDownBlockFlat(nn.Module):
def __init__(
self,
in_channels: int,
out_channels: int,
temb_channels: int,
dropout: float = 0.0,
num_layers: int = 1,
transformer_layers_per_block: Union[int, Tuple[int]] = 1,
resnet_eps: float = 1e-6,
resnet_time_scale_shift: str = "default",
resnet_act_fn: str = "swish",
resnet_groups: int = 32,
resnet_pre_norm: bool = True,
num_attention_heads: int = 1,
cross_attention_dim: int = 1280,
output_scale_factor: float = 1.0,
downsample_padding: int = 1,
add_downsample: bool = True,
dual_cross_attention: bool = False,
use_linear_projection: bool = False,
only_cross_attention: bool = False,
upcast_attention: bool = False,
attention_type: str = "default",
):
super().__init__()
resnets = []
attentions = []
self.has_cross_attention = True
self.num_attention_heads = num_attention_heads
if isinstance(transformer_layers_per_block, int):
transformer_layers_per_block = [transformer_layers_per_block] * num_layers
for i in range(num_layers):
in_channels = in_channels if i == 0 else out_channels
resnets.append(
ResnetBlockFlat(
in_channels=in_channels,
out_channels=out_channels,
temb_channels=temb_channels,
eps=resnet_eps,
groups=resnet_groups,
dropout=dropout,
time_embedding_norm=resnet_time_scale_shift,
non_linearity=resnet_act_fn,
output_scale_factor=output_scale_factor,
pre_norm=resnet_pre_norm,
)
)
if not dual_cross_attention:
attentions.append(
Transformer2DModel(
num_attention_heads,
out_channels // num_attention_heads,
in_channels=out_channels,
num_layers=transformer_layers_per_block[i],
cross_attention_dim=cross_attention_dim,
norm_num_groups=resnet_groups,
use_linear_projection=use_linear_projection,
only_cross_attention=only_cross_attention,
upcast_attention=upcast_attention,
attention_type=attention_type,
)
)
else:
attentions.append(
DualTransformer2DModel(
num_attention_heads,
out_channels // num_attention_heads,
in_channels=out_channels,
num_layers=1,
cross_attention_dim=cross_attention_dim,
norm_num_groups=resnet_groups,
)
)
self.attentions = nn.ModuleList(attentions)
self.resnets = nn.ModuleList(resnets)
if add_downsample:
self.downsamplers = nn.ModuleList(
[
LinearMultiDim(
out_channels, use_conv=True, out_channels=out_channels, padding=downsample_padding, name="op"
)
]
)
else:
self.downsamplers = None
self.gradient_checkpointing = False
def forward(
self,
hidden_states: torch.FloatTensor,
temb: Optional[torch.FloatTensor] = None,
encoder_hidden_states: Optional[torch.FloatTensor] = None,
attention_mask: Optional[torch.FloatTensor] = None,
cross_attention_kwargs: Optional[Dict[str, Any]] = None,
encoder_attention_mask: Optional[torch.FloatTensor] = None,
additional_residuals: Optional[torch.FloatTensor] = None,
) -> Tuple[torch.FloatTensor, Tuple[torch.FloatTensor, ...]]:
output_states = ()
lora_scale = cross_attention_kwargs.get("scale", 1.0) if cross_attention_kwargs is not None else 1.0
blocks = list(zip(self.resnets, self.attentions))
for i, (resnet, attn) in enumerate(blocks):
if self.training and self.gradient_checkpointing:
def create_custom_forward(module, return_dict=None):
def custom_forward(*inputs):
if return_dict is not None:
return module(*inputs, return_dict=return_dict)
else:
return module(*inputs)
return custom_forward
ckpt_kwargs: Dict[str, Any] = {"use_reentrant": False} if is_torch_version(">=", "1.11.0") else {}
hidden_states = torch.utils.checkpoint.checkpoint(
create_custom_forward(resnet),
hidden_states,
temb,
**ckpt_kwargs,
)
hidden_states = attn(
hidden_states,
encoder_hidden_states=encoder_hidden_states,
cross_attention_kwargs=cross_attention_kwargs,
attention_mask=attention_mask,
encoder_attention_mask=encoder_attention_mask,
return_dict=False,
)[0]
else:
hidden_states = resnet(hidden_states, temb, scale=lora_scale)
hidden_states = attn(
hidden_states,
encoder_hidden_states=encoder_hidden_states,
cross_attention_kwargs=cross_attention_kwargs,
attention_mask=attention_mask,
encoder_attention_mask=encoder_attention_mask,
return_dict=False,
)[0]
# apply additional residuals to the output of the last pair of resnet and attention blocks
if i == len(blocks) - 1 and additional_residuals is not None:
hidden_states = hidden_states + additional_residuals
output_states = output_states + (hidden_states,)
if self.downsamplers is not None:
for downsampler in self.downsamplers:
hidden_states = downsampler(hidden_states, scale=lora_scale)
output_states = output_states + (hidden_states,)
return hidden_states, output_states
# Copied from diffusers.models.unets.unet_2d_blocks.UpBlock2D with UpBlock2D->UpBlockFlat, ResnetBlock2D->ResnetBlockFlat, Upsample2D->LinearMultiDim
class UpBlockFlat(nn.Module):
def __init__(
self,
in_channels: int,
prev_output_channel: int,
out_channels: int,
temb_channels: int,
resolution_idx: Optional[int] = None,
dropout: float = 0.0,
num_layers: int = 1,
resnet_eps: float = 1e-6,
resnet_time_scale_shift: str = "default",
resnet_act_fn: str = "swish",
resnet_groups: int = 32,
resnet_pre_norm: bool = True,
output_scale_factor: float = 1.0,
add_upsample: bool = True,
):
super().__init__()
resnets = []
for i in range(num_layers):
res_skip_channels = in_channels if (i == num_layers - 1) else out_channels
resnet_in_channels = prev_output_channel if i == 0 else out_channels
resnets.append(
ResnetBlockFlat(
in_channels=resnet_in_channels + res_skip_channels,
out_channels=out_channels,
temb_channels=temb_channels,
eps=resnet_eps,
groups=resnet_groups,
dropout=dropout,
time_embedding_norm=resnet_time_scale_shift,
non_linearity=resnet_act_fn,
output_scale_factor=output_scale_factor,
pre_norm=resnet_pre_norm,
)
)
self.resnets = nn.ModuleList(resnets)
if add_upsample:
self.upsamplers = nn.ModuleList([LinearMultiDim(out_channels, use_conv=True, out_channels=out_channels)])
else:
self.upsamplers = None
self.gradient_checkpointing = False
self.resolution_idx = resolution_idx
def forward(
self,
hidden_states: torch.FloatTensor,
res_hidden_states_tuple: Tuple[torch.FloatTensor, ...],
temb: Optional[torch.FloatTensor] = None,
upsample_size: Optional[int] = None,
scale: float = 1.0,
) -> torch.FloatTensor:
is_freeu_enabled = (
getattr(self, "s1", None)
and getattr(self, "s2", None)
and getattr(self, "b1", None)
and getattr(self, "b2", None)
)
for resnet in self.resnets:
# pop res hidden states
res_hidden_states = res_hidden_states_tuple[-1]
res_hidden_states_tuple = res_hidden_states_tuple[:-1]
# FreeU: Only operate on the first two stages
if is_freeu_enabled:
hidden_states, res_hidden_states = apply_freeu(
self.resolution_idx,
hidden_states,
res_hidden_states,
s1=self.s1,
s2=self.s2,
b1=self.b1,
b2=self.b2,
)
hidden_states = torch.cat([hidden_states, res_hidden_states], dim=1)
if self.training and self.gradient_checkpointing:
def create_custom_forward(module):
def custom_forward(*inputs):
return module(*inputs)
return custom_forward
if is_torch_version(">=", "1.11.0"):
hidden_states = torch.utils.checkpoint.checkpoint(
create_custom_forward(resnet), hidden_states, temb, use_reentrant=False
)
else:
hidden_states = torch.utils.checkpoint.checkpoint(
create_custom_forward(resnet), hidden_states, temb
)
else:
hidden_states = resnet(hidden_states, temb, scale=scale)
if self.upsamplers is not None:
for upsampler in self.upsamplers:
hidden_states = upsampler(hidden_states, upsample_size, scale=scale)
return hidden_states
# Copied from diffusers.models.unets.unet_2d_blocks.CrossAttnUpBlock2D with CrossAttnUpBlock2D->CrossAttnUpBlockFlat, ResnetBlock2D->ResnetBlockFlat, Upsample2D->LinearMultiDim
class CrossAttnUpBlockFlat(nn.Module):
def __init__(
self,
in_channels: int,
out_channels: int,
prev_output_channel: int,
temb_channels: int,
resolution_idx: Optional[int] = None,
dropout: float = 0.0,
num_layers: int = 1,
transformer_layers_per_block: Union[int, Tuple[int]] = 1,
resnet_eps: float = 1e-6,
resnet_time_scale_shift: str = "default",
resnet_act_fn: str = "swish",
resnet_groups: int = 32,
resnet_pre_norm: bool = True,
num_attention_heads: int = 1,
cross_attention_dim: int = 1280,
output_scale_factor: float = 1.0,
add_upsample: bool = True,
dual_cross_attention: bool = False,
use_linear_projection: bool = False,
only_cross_attention: bool = False,
upcast_attention: bool = False,
attention_type: str = "default",
):
super().__init__()
resnets = []
attentions = []
self.has_cross_attention = True
self.num_attention_heads = num_attention_heads
if isinstance(transformer_layers_per_block, int):
transformer_layers_per_block = [transformer_layers_per_block] * num_layers
for i in range(num_layers):
res_skip_channels = in_channels if (i == num_layers - 1) else out_channels
resnet_in_channels = prev_output_channel if i == 0 else out_channels
resnets.append(
ResnetBlockFlat(
in_channels=resnet_in_channels + res_skip_channels,
out_channels=out_channels,
temb_channels=temb_channels,
eps=resnet_eps,
groups=resnet_groups,
dropout=dropout,
time_embedding_norm=resnet_time_scale_shift,
non_linearity=resnet_act_fn,
output_scale_factor=output_scale_factor,
pre_norm=resnet_pre_norm,
)
)
if not dual_cross_attention:
attentions.append(
Transformer2DModel(
num_attention_heads,
out_channels // num_attention_heads,
in_channels=out_channels,
num_layers=transformer_layers_per_block[i],
cross_attention_dim=cross_attention_dim,
norm_num_groups=resnet_groups,
use_linear_projection=use_linear_projection,
only_cross_attention=only_cross_attention,
upcast_attention=upcast_attention,
attention_type=attention_type,
)
)
else:
attentions.append(
DualTransformer2DModel(
num_attention_heads,
out_channels // num_attention_heads,
in_channels=out_channels,
num_layers=1,
cross_attention_dim=cross_attention_dim,
norm_num_groups=resnet_groups,
)
)
self.attentions = nn.ModuleList(attentions)
self.resnets = nn.ModuleList(resnets)
if add_upsample:
self.upsamplers = nn.ModuleList([LinearMultiDim(out_channels, use_conv=True, out_channels=out_channels)])
else:
self.upsamplers = None
self.gradient_checkpointing = False
self.resolution_idx = resolution_idx
def forward(
self,
hidden_states: torch.FloatTensor,
res_hidden_states_tuple: Tuple[torch.FloatTensor, ...],
temb: Optional[torch.FloatTensor] = None,
encoder_hidden_states: Optional[torch.FloatTensor] = None,
cross_attention_kwargs: Optional[Dict[str, Any]] = None,
upsample_size: Optional[int] = None,
attention_mask: Optional[torch.FloatTensor] = None,
encoder_attention_mask: Optional[torch.FloatTensor] = None,
) -> torch.FloatTensor:
lora_scale = cross_attention_kwargs.get("scale", 1.0) if cross_attention_kwargs is not None else 1.0
is_freeu_enabled = (
getattr(self, "s1", None)
and getattr(self, "s2", None)
and getattr(self, "b1", None)
and getattr(self, "b2", None)
)
for resnet, attn in zip(self.resnets, self.attentions):
# pop res hidden states
res_hidden_states = res_hidden_states_tuple[-1]
res_hidden_states_tuple = res_hidden_states_tuple[:-1]
# FreeU: Only operate on the first two stages
if is_freeu_enabled:
hidden_states, res_hidden_states = apply_freeu(
self.resolution_idx,
hidden_states,
res_hidden_states,
s1=self.s1,
s2=self.s2,
b1=self.b1,
b2=self.b2,
)
hidden_states = torch.cat([hidden_states, res_hidden_states], dim=1)
if self.training and self.gradient_checkpointing:
def create_custom_forward(module, return_dict=None):
def custom_forward(*inputs):
if return_dict is not None:
return module(*inputs, return_dict=return_dict)
else:
return module(*inputs)
return custom_forward
ckpt_kwargs: Dict[str, Any] = {"use_reentrant": False} if is_torch_version(">=", "1.11.0") else {}
hidden_states = torch.utils.checkpoint.checkpoint(
create_custom_forward(resnet),
hidden_states,
temb,
**ckpt_kwargs,
)
hidden_states = attn(
hidden_states,
encoder_hidden_states=encoder_hidden_states,
cross_attention_kwargs=cross_attention_kwargs,
attention_mask=attention_mask,
encoder_attention_mask=encoder_attention_mask,
return_dict=False,
)[0]
else:
hidden_states = resnet(hidden_states, temb, scale=lora_scale)
hidden_states = attn(
hidden_states,
encoder_hidden_states=encoder_hidden_states,
cross_attention_kwargs=cross_attention_kwargs,
attention_mask=attention_mask,
encoder_attention_mask=encoder_attention_mask,
return_dict=False,
)[0]
if self.upsamplers is not None:
for upsampler in self.upsamplers:
hidden_states = upsampler(hidden_states, upsample_size, scale=lora_scale)
return hidden_states
# Copied from diffusers.models.unets.unet_2d_blocks.UNetMidBlock2D with UNetMidBlock2D->UNetMidBlockFlat, ResnetBlock2D->ResnetBlockFlat
class UNetMidBlockFlat(nn.Module):
"""
A 2D UNet mid-block [`UNetMidBlockFlat`] with multiple residual blocks and optional attention blocks.
Args:
in_channels (`int`): The number of input channels.
temb_channels (`int`): The number of temporal embedding channels.
dropout (`float`, *optional*, defaults to 0.0): The dropout rate.
num_layers (`int`, *optional*, defaults to 1): The number of residual blocks.
resnet_eps (`float`, *optional*, 1e-6 ): The epsilon value for the resnet blocks.
resnet_time_scale_shift (`str`, *optional*, defaults to `default`):
The type of normalization to apply to the time embeddings. This can help to improve the performance of the
model on tasks with long-range temporal dependencies.
resnet_act_fn (`str`, *optional*, defaults to `swish`): The activation function for the resnet blocks.
resnet_groups (`int`, *optional*, defaults to 32):
The number of groups to use in the group normalization layers of the resnet blocks.
attn_groups (`Optional[int]`, *optional*, defaults to None): The number of groups for the attention blocks.
resnet_pre_norm (`bool`, *optional*, defaults to `True`):
Whether to use pre-normalization for the resnet blocks.
add_attention (`bool`, *optional*, defaults to `True`): Whether to add attention blocks.
attention_head_dim (`int`, *optional*, defaults to 1):
Dimension of a single attention head. The number of attention heads is determined based on this value and
the number of input channels.
output_scale_factor (`float`, *optional*, defaults to 1.0): The output scale factor.
Returns:
`torch.FloatTensor`: The output of the last residual block, which is a tensor of shape `(batch_size,
in_channels, height, width)`.
"""
def __init__(
self,
in_channels: int,
temb_channels: int,
dropout: float = 0.0,
num_layers: int = 1,
resnet_eps: float = 1e-6,
resnet_time_scale_shift: str = "default", # default, spatial
resnet_act_fn: str = "swish",
resnet_groups: int = 32,
attn_groups: Optional[int] = None,
resnet_pre_norm: bool = True,
add_attention: bool = True,
attention_head_dim: int = 1,
output_scale_factor: float = 1.0,
):
super().__init__()
resnet_groups = resnet_groups if resnet_groups is not None else min(in_channels // 4, 32)
self.add_attention = add_attention
if attn_groups is None:
attn_groups = resnet_groups if resnet_time_scale_shift == "default" else None
# there is always at least one resnet
if resnet_time_scale_shift == "spatial":
resnets = [
ResnetBlockCondNorm2D(
in_channels=in_channels,
out_channels=in_channels,
temb_channels=temb_channels,
eps=resnet_eps,
groups=resnet_groups,
dropout=dropout,
time_embedding_norm="spatial",
non_linearity=resnet_act_fn,
output_scale_factor=output_scale_factor,
)
]
else:
resnets = [
ResnetBlockFlat(
in_channels=in_channels,
out_channels=in_channels,
temb_channels=temb_channels,
eps=resnet_eps,
groups=resnet_groups,
dropout=dropout,
time_embedding_norm=resnet_time_scale_shift,
non_linearity=resnet_act_fn,
output_scale_factor=output_scale_factor,
pre_norm=resnet_pre_norm,
)
]
attentions = []
if attention_head_dim is None:
logger.warn(
f"It is not recommend to pass `attention_head_dim=None`. Defaulting `attention_head_dim` to `in_channels`: {in_channels}."
)
attention_head_dim = in_channels
for _ in range(num_layers):
if self.add_attention:
attentions.append(
Attention(
in_channels,
heads=in_channels // attention_head_dim,
dim_head=attention_head_dim,
rescale_output_factor=output_scale_factor,
eps=resnet_eps,
norm_num_groups=attn_groups,
spatial_norm_dim=temb_channels if resnet_time_scale_shift == "spatial" else None,
residual_connection=True,
bias=True,
upcast_softmax=True,
_from_deprecated_attn_block=True,
)
)
else:
attentions.append(None)
if resnet_time_scale_shift == "spatial":
resnets.append(
ResnetBlockCondNorm2D(
in_channels=in_channels,
out_channels=in_channels,
temb_channels=temb_channels,
eps=resnet_eps,
groups=resnet_groups,
dropout=dropout,
time_embedding_norm="spatial",
non_linearity=resnet_act_fn,
output_scale_factor=output_scale_factor,
)
)
else:
resnets.append(
ResnetBlockFlat(
in_channels=in_channels,
out_channels=in_channels,
temb_channels=temb_channels,
eps=resnet_eps,
groups=resnet_groups,
dropout=dropout,
time_embedding_norm=resnet_time_scale_shift,
non_linearity=resnet_act_fn,
output_scale_factor=output_scale_factor,
pre_norm=resnet_pre_norm,
)
)
self.attentions = nn.ModuleList(attentions)
self.resnets = nn.ModuleList(resnets)
def forward(self, hidden_states: torch.FloatTensor, temb: Optional[torch.FloatTensor] = None) -> torch.FloatTensor:
hidden_states = self.resnets[0](hidden_states, temb)
for attn, resnet in zip(self.attentions, self.resnets[1:]):
if attn is not None:
hidden_states = attn(hidden_states, temb=temb)
hidden_states = resnet(hidden_states, temb)
return hidden_states
# Copied from diffusers.models.unets.unet_2d_blocks.UNetMidBlock2DCrossAttn with UNetMidBlock2DCrossAttn->UNetMidBlockFlatCrossAttn, ResnetBlock2D->ResnetBlockFlat
class UNetMidBlockFlatCrossAttn(nn.Module):
def __init__(
self,
in_channels: int,
temb_channels: int,
dropout: float = 0.0,
num_layers: int = 1,
transformer_layers_per_block: Union[int, Tuple[int]] = 1,
resnet_eps: float = 1e-6,
resnet_time_scale_shift: str = "default",
resnet_act_fn: str = "swish",
resnet_groups: int = 32,
resnet_pre_norm: bool = True,
num_attention_heads: int = 1,
output_scale_factor: float = 1.0,
cross_attention_dim: int = 1280,
dual_cross_attention: bool = False,
use_linear_projection: bool = False,
upcast_attention: bool = False,
attention_type: str = "default",
):
super().__init__()
self.has_cross_attention = True
self.num_attention_heads = num_attention_heads
resnet_groups = resnet_groups if resnet_groups is not None else min(in_channels // 4, 32)
# support for variable transformer layers per block
if isinstance(transformer_layers_per_block, int):
transformer_layers_per_block = [transformer_layers_per_block] * num_layers
# there is always at least one resnet
resnets = [
ResnetBlockFlat(
in_channels=in_channels,
out_channels=in_channels,
temb_channels=temb_channels,
eps=resnet_eps,
groups=resnet_groups,
dropout=dropout,
time_embedding_norm=resnet_time_scale_shift,
non_linearity=resnet_act_fn,
output_scale_factor=output_scale_factor,
pre_norm=resnet_pre_norm,
)
]
attentions = []
for i in range(num_layers):
if not dual_cross_attention:
attentions.append(
Transformer2DModel(
num_attention_heads,
in_channels // num_attention_heads,
in_channels=in_channels,
num_layers=transformer_layers_per_block[i],
cross_attention_dim=cross_attention_dim,
norm_num_groups=resnet_groups,
use_linear_projection=use_linear_projection,
upcast_attention=upcast_attention,
attention_type=attention_type,
)
)
else:
attentions.append(
DualTransformer2DModel(
num_attention_heads,
in_channels // num_attention_heads,
in_channels=in_channels,
num_layers=1,
cross_attention_dim=cross_attention_dim,
norm_num_groups=resnet_groups,
)
)
resnets.append(
ResnetBlockFlat(
in_channels=in_channels,
out_channels=in_channels,
temb_channels=temb_channels,
eps=resnet_eps,
groups=resnet_groups,
dropout=dropout,
time_embedding_norm=resnet_time_scale_shift,
non_linearity=resnet_act_fn,
output_scale_factor=output_scale_factor,
pre_norm=resnet_pre_norm,
)
)
self.attentions = nn.ModuleList(attentions)
self.resnets = nn.ModuleList(resnets)
self.gradient_checkpointing = False
def forward(
self,
hidden_states: torch.FloatTensor,
temb: Optional[torch.FloatTensor] = None,
encoder_hidden_states: Optional[torch.FloatTensor] = None,
attention_mask: Optional[torch.FloatTensor] = None,
cross_attention_kwargs: Optional[Dict[str, Any]] = None,
encoder_attention_mask: Optional[torch.FloatTensor] = None,
) -> torch.FloatTensor:
lora_scale = cross_attention_kwargs.get("scale", 1.0) if cross_attention_kwargs is not None else 1.0
hidden_states = self.resnets[0](hidden_states, temb, scale=lora_scale)
for attn, resnet in zip(self.attentions, self.resnets[1:]):
if self.training and self.gradient_checkpointing:
def create_custom_forward(module, return_dict=None):
def custom_forward(*inputs):
if return_dict is not None:
return module(*inputs, return_dict=return_dict)
else:
return module(*inputs)
return custom_forward
ckpt_kwargs: Dict[str, Any] = {"use_reentrant": False} if is_torch_version(">=", "1.11.0") else {}
hidden_states = attn(
hidden_states,
encoder_hidden_states=encoder_hidden_states,
cross_attention_kwargs=cross_attention_kwargs,
attention_mask=attention_mask,
encoder_attention_mask=encoder_attention_mask,
return_dict=False,
)[0]
hidden_states = torch.utils.checkpoint.checkpoint(
create_custom_forward(resnet),
hidden_states,
temb,
**ckpt_kwargs,
)
else:
hidden_states = attn(
hidden_states,
encoder_hidden_states=encoder_hidden_states,
cross_attention_kwargs=cross_attention_kwargs,
attention_mask=attention_mask,
encoder_attention_mask=encoder_attention_mask,
return_dict=False,
)[0]
hidden_states = resnet(hidden_states, temb, scale=lora_scale)
return hidden_states
# Copied from diffusers.models.unets.unet_2d_blocks.UNetMidBlock2DSimpleCrossAttn with UNetMidBlock2DSimpleCrossAttn->UNetMidBlockFlatSimpleCrossAttn, ResnetBlock2D->ResnetBlockFlat
class UNetMidBlockFlatSimpleCrossAttn(nn.Module):
def __init__(
self,
in_channels: int,
temb_channels: int,
dropout: float = 0.0,
num_layers: int = 1,
resnet_eps: float = 1e-6,
resnet_time_scale_shift: str = "default",
resnet_act_fn: str = "swish",
resnet_groups: int = 32,
resnet_pre_norm: bool = True,
attention_head_dim: int = 1,
output_scale_factor: float = 1.0,
cross_attention_dim: int = 1280,
skip_time_act: bool = False,
only_cross_attention: bool = False,
cross_attention_norm: Optional[str] = None,
):
super().__init__()
self.has_cross_attention = True
self.attention_head_dim = attention_head_dim
resnet_groups = resnet_groups if resnet_groups is not None else min(in_channels // 4, 32)
self.num_heads = in_channels // self.attention_head_dim
# there is always at least one resnet
resnets = [
ResnetBlockFlat(
in_channels=in_channels,
out_channels=in_channels,
temb_channels=temb_channels,
eps=resnet_eps,
groups=resnet_groups,
dropout=dropout,
time_embedding_norm=resnet_time_scale_shift,
non_linearity=resnet_act_fn,
output_scale_factor=output_scale_factor,
pre_norm=resnet_pre_norm,
skip_time_act=skip_time_act,
)
]
attentions = []
for _ in range(num_layers):
processor = (
AttnAddedKVProcessor2_0() if hasattr(F, "scaled_dot_product_attention") else AttnAddedKVProcessor()
)
attentions.append(
Attention(
query_dim=in_channels,
cross_attention_dim=in_channels,
heads=self.num_heads,
dim_head=self.attention_head_dim,
added_kv_proj_dim=cross_attention_dim,
norm_num_groups=resnet_groups,
bias=True,
upcast_softmax=True,
only_cross_attention=only_cross_attention,
cross_attention_norm=cross_attention_norm,
processor=processor,
)
)
resnets.append(
ResnetBlockFlat(
in_channels=in_channels,
out_channels=in_channels,
temb_channels=temb_channels,
eps=resnet_eps,
groups=resnet_groups,
dropout=dropout,
time_embedding_norm=resnet_time_scale_shift,
non_linearity=resnet_act_fn,
output_scale_factor=output_scale_factor,
pre_norm=resnet_pre_norm,
skip_time_act=skip_time_act,
)
)
self.attentions = nn.ModuleList(attentions)
self.resnets = nn.ModuleList(resnets)
def forward(
self,
hidden_states: torch.FloatTensor,
temb: Optional[torch.FloatTensor] = None,
encoder_hidden_states: Optional[torch.FloatTensor] = None,
attention_mask: Optional[torch.FloatTensor] = None,
cross_attention_kwargs: Optional[Dict[str, Any]] = None,
encoder_attention_mask: Optional[torch.FloatTensor] = None,
) -> torch.FloatTensor:
cross_attention_kwargs = cross_attention_kwargs if cross_attention_kwargs is not None else {}
lora_scale = cross_attention_kwargs.get("scale", 1.0)
if attention_mask is None:
# if encoder_hidden_states is defined: we are doing cross-attn, so we should use cross-attn mask.
mask = None if encoder_hidden_states is None else encoder_attention_mask
else:
# when attention_mask is defined: we don't even check for encoder_attention_mask.
# this is to maintain compatibility with UnCLIP, which uses 'attention_mask' param for cross-attn masks.
# TODO: UnCLIP should express cross-attn mask via encoder_attention_mask param instead of via attention_mask.
# then we can simplify this whole if/else block to:
# mask = attention_mask if encoder_hidden_states is None else encoder_attention_mask
mask = attention_mask
hidden_states = self.resnets[0](hidden_states, temb, scale=lora_scale)
for attn, resnet in zip(self.attentions, self.resnets[1:]):
# attn
hidden_states = attn(
hidden_states,
encoder_hidden_states=encoder_hidden_states,
attention_mask=mask,
**cross_attention_kwargs,
)
# resnet
hidden_states = resnet(hidden_states, temb, scale=lora_scale)
return hidden_states
| diffusers/src/diffusers/pipelines/deprecated/versatile_diffusion/modeling_text_unet.py/0 | {
"file_path": "diffusers/src/diffusers/pipelines/deprecated/versatile_diffusion/modeling_text_unet.py",
"repo_id": "diffusers",
"token_count": 55425
} | 116 |
# Copyright 2023 Stanford University Team and The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
# DISCLAIMER: This code is strongly influenced by https://github.com/pesser/pytorch_diffusion
# and https://github.com/hojonathanho/diffusion
import inspect
from typing import Any, Callable, Dict, List, Optional, Union
import PIL.Image
import torch
from transformers import CLIPImageProcessor, CLIPTextModel, CLIPTokenizer, CLIPVisionModelWithProjection
from ...image_processor import PipelineImageInput, VaeImageProcessor
from ...loaders import FromSingleFileMixin, IPAdapterMixin, LoraLoaderMixin, TextualInversionLoaderMixin
from ...models import AutoencoderKL, ImageProjection, UNet2DConditionModel
from ...models.lora import adjust_lora_scale_text_encoder
from ...schedulers import LCMScheduler
from ...utils import (
USE_PEFT_BACKEND,
deprecate,
logging,
replace_example_docstring,
scale_lora_layers,
unscale_lora_layers,
)
from ...utils.torch_utils import randn_tensor
from ..pipeline_utils import DiffusionPipeline
from ..stable_diffusion import StableDiffusionPipelineOutput, StableDiffusionSafetyChecker
logger = logging.get_logger(__name__) # pylint: disable=invalid-name
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion_img2img.retrieve_latents
def retrieve_latents(
encoder_output: torch.Tensor, generator: Optional[torch.Generator] = None, sample_mode: str = "sample"
):
if hasattr(encoder_output, "latent_dist") and sample_mode == "sample":
return encoder_output.latent_dist.sample(generator)
elif hasattr(encoder_output, "latent_dist") and sample_mode == "argmax":
return encoder_output.latent_dist.mode()
elif hasattr(encoder_output, "latents"):
return encoder_output.latents
else:
raise AttributeError("Could not access latents of provided encoder_output")
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion.retrieve_timesteps
def retrieve_timesteps(
scheduler,
num_inference_steps: Optional[int] = None,
device: Optional[Union[str, torch.device]] = None,
timesteps: Optional[List[int]] = None,
**kwargs,
):
"""
Calls the scheduler's `set_timesteps` method and retrieves timesteps from the scheduler after the call. Handles
custom timesteps. Any kwargs will be supplied to `scheduler.set_timesteps`.
Args:
scheduler (`SchedulerMixin`):
The scheduler to get timesteps from.
num_inference_steps (`int`):
The number of diffusion steps used when generating samples with a pre-trained model. If used,
`timesteps` must be `None`.
device (`str` or `torch.device`, *optional*):
The device to which the timesteps should be moved to. If `None`, the timesteps are not moved.
timesteps (`List[int]`, *optional*):
Custom timesteps used to support arbitrary spacing between timesteps. If `None`, then the default
timestep spacing strategy of the scheduler is used. If `timesteps` is passed, `num_inference_steps`
must be `None`.
Returns:
`Tuple[torch.Tensor, int]`: A tuple where the first element is the timestep schedule from the scheduler and the
second element is the number of inference steps.
"""
if timesteps is not None:
accepts_timesteps = "timesteps" in set(inspect.signature(scheduler.set_timesteps).parameters.keys())
if not accepts_timesteps:
raise ValueError(
f"The current scheduler class {scheduler.__class__}'s `set_timesteps` does not support custom"
f" timestep schedules. Please check whether you are using the correct scheduler."
)
scheduler.set_timesteps(timesteps=timesteps, device=device, **kwargs)
timesteps = scheduler.timesteps
num_inference_steps = len(timesteps)
else:
scheduler.set_timesteps(num_inference_steps, device=device, **kwargs)
timesteps = scheduler.timesteps
return timesteps, num_inference_steps
EXAMPLE_DOC_STRING = """
Examples:
```py
>>> from diffusers import AutoPipelineForImage2Image
>>> import torch
>>> import PIL
>>> pipe = AutoPipelineForImage2Image.from_pretrained("SimianLuo/LCM_Dreamshaper_v7")
>>> # To save GPU memory, torch.float16 can be used, but it may compromise image quality.
>>> pipe.to(torch_device="cuda", torch_dtype=torch.float32)
>>> prompt = "High altitude snowy mountains"
>>> image = PIL.Image.open("./snowy_mountains.png")
>>> # Can be set to 1~50 steps. LCM support fast inference even <= 4 steps. Recommend: 1~8 steps.
>>> num_inference_steps = 4
>>> images = pipe(
... prompt=prompt, image=image, num_inference_steps=num_inference_steps, guidance_scale=8.0
... ).images
>>> images[0].save("image.png")
```
"""
class LatentConsistencyModelImg2ImgPipeline(
DiffusionPipeline, TextualInversionLoaderMixin, IPAdapterMixin, LoraLoaderMixin, FromSingleFileMixin
):
r"""
Pipeline for image-to-image generation using a latent consistency model.
This model inherits from [`DiffusionPipeline`]. Check the superclass documentation for the generic methods
implemented for all pipelines (downloading, saving, running on a particular device, etc.).
The pipeline also inherits the following loading methods:
- [`~loaders.TextualInversionLoaderMixin.load_textual_inversion`] for loading textual inversion embeddings
- [`~loaders.LoraLoaderMixin.load_lora_weights`] for loading LoRA weights
- [`~loaders.LoraLoaderMixin.save_lora_weights`] for saving LoRA weights
- [`~loaders.FromSingleFileMixin.from_single_file`] for loading `.ckpt` files
- [`~loaders.IPAdapterMixin.load_ip_adapter`] for loading IP Adapters
Args:
vae ([`AutoencoderKL`]):
Variational Auto-Encoder (VAE) model to encode and decode images to and from latent representations.
text_encoder ([`~transformers.CLIPTextModel`]):
Frozen text-encoder ([clip-vit-large-patch14](https://huggingface.co/openai/clip-vit-large-patch14)).
tokenizer ([`~transformers.CLIPTokenizer`]):
A `CLIPTokenizer` to tokenize text.
unet ([`UNet2DConditionModel`]):
A `UNet2DConditionModel` to denoise the encoded image latents.
scheduler ([`SchedulerMixin`]):
A scheduler to be used in combination with `unet` to denoise the encoded image latents. Currently only
supports [`LCMScheduler`].
safety_checker ([`StableDiffusionSafetyChecker`]):
Classification module that estimates whether generated images could be considered offensive or harmful.
Please refer to the [model card](https://huggingface.co/runwayml/stable-diffusion-v1-5) for more details
about a model's potential harms.
feature_extractor ([`~transformers.CLIPImageProcessor`]):
A `CLIPImageProcessor` to extract features from generated images; used as inputs to the `safety_checker`.
requires_safety_checker (`bool`, *optional*, defaults to `True`):
Whether the pipeline requires a safety checker component.
"""
model_cpu_offload_seq = "text_encoder->unet->vae"
_optional_components = ["safety_checker", "feature_extractor", "image_encoder"]
_exclude_from_cpu_offload = ["safety_checker"]
_callback_tensor_inputs = ["latents", "denoised", "prompt_embeds", "w_embedding"]
def __init__(
self,
vae: AutoencoderKL,
text_encoder: CLIPTextModel,
tokenizer: CLIPTokenizer,
unet: UNet2DConditionModel,
scheduler: LCMScheduler,
safety_checker: StableDiffusionSafetyChecker,
feature_extractor: CLIPImageProcessor,
image_encoder: Optional[CLIPVisionModelWithProjection] = None,
requires_safety_checker: bool = True,
):
super().__init__()
self.register_modules(
vae=vae,
text_encoder=text_encoder,
tokenizer=tokenizer,
unet=unet,
scheduler=scheduler,
safety_checker=safety_checker,
feature_extractor=feature_extractor,
image_encoder=image_encoder,
)
if safety_checker is None and requires_safety_checker:
logger.warning(
f"You have disabled the safety checker for {self.__class__} by passing `safety_checker=None`. Ensure"
" that you abide to the conditions of the Stable Diffusion license and do not expose unfiltered"
" results in services or applications open to the public. Both the diffusers team and Hugging Face"
" strongly recommend to keep the safety filter enabled in all public facing circumstances, disabling"
" it only for use-cases that involve analyzing network behavior or auditing its results. For more"
" information, please have a look at https://github.com/huggingface/diffusers/pull/254 ."
)
self.vae_scale_factor = 2 ** (len(self.vae.config.block_out_channels) - 1)
self.image_processor = VaeImageProcessor(vae_scale_factor=self.vae_scale_factor)
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion.StableDiffusionPipeline.enable_vae_slicing
def enable_vae_slicing(self):
r"""
Enable sliced VAE decoding. When this option is enabled, the VAE will split the input tensor in slices to
compute decoding in several steps. This is useful to save some memory and allow larger batch sizes.
"""
self.vae.enable_slicing()
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion.StableDiffusionPipeline.disable_vae_slicing
def disable_vae_slicing(self):
r"""
Disable sliced VAE decoding. If `enable_vae_slicing` was previously enabled, this method will go back to
computing decoding in one step.
"""
self.vae.disable_slicing()
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion.StableDiffusionPipeline.enable_vae_tiling
def enable_vae_tiling(self):
r"""
Enable tiled VAE decoding. When this option is enabled, the VAE will split the input tensor into tiles to
compute decoding and encoding in several steps. This is useful for saving a large amount of memory and to allow
processing larger images.
"""
self.vae.enable_tiling()
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion.StableDiffusionPipeline.disable_vae_tiling
def disable_vae_tiling(self):
r"""
Disable tiled VAE decoding. If `enable_vae_tiling` was previously enabled, this method will go back to
computing decoding in one step.
"""
self.vae.disable_tiling()
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion.StableDiffusionPipeline.enable_freeu
def enable_freeu(self, s1: float, s2: float, b1: float, b2: float):
r"""Enables the FreeU mechanism as in https://arxiv.org/abs/2309.11497.
The suffixes after the scaling factors represent the stages where they are being applied.
Please refer to the [official repository](https://github.com/ChenyangSi/FreeU) for combinations of the values
that are known to work well for different pipelines such as Stable Diffusion v1, v2, and Stable Diffusion XL.
Args:
s1 (`float`):
Scaling factor for stage 1 to attenuate the contributions of the skip features. This is done to
mitigate "oversmoothing effect" in the enhanced denoising process.
s2 (`float`):
Scaling factor for stage 2 to attenuate the contributions of the skip features. This is done to
mitigate "oversmoothing effect" in the enhanced denoising process.
b1 (`float`): Scaling factor for stage 1 to amplify the contributions of backbone features.
b2 (`float`): Scaling factor for stage 2 to amplify the contributions of backbone features.
"""
if not hasattr(self, "unet"):
raise ValueError("The pipeline must have `unet` for using FreeU.")
self.unet.enable_freeu(s1=s1, s2=s2, b1=b1, b2=b2)
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion.StableDiffusionPipeline.disable_freeu
def disable_freeu(self):
"""Disables the FreeU mechanism if enabled."""
self.unet.disable_freeu()
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion.StableDiffusionPipeline.encode_prompt
def encode_prompt(
self,
prompt,
device,
num_images_per_prompt,
do_classifier_free_guidance,
negative_prompt=None,
prompt_embeds: Optional[torch.FloatTensor] = None,
negative_prompt_embeds: Optional[torch.FloatTensor] = None,
lora_scale: Optional[float] = None,
clip_skip: Optional[int] = None,
):
r"""
Encodes the prompt into text encoder hidden states.
Args:
prompt (`str` or `List[str]`, *optional*):
prompt to be encoded
device: (`torch.device`):
torch device
num_images_per_prompt (`int`):
number of images that should be generated per prompt
do_classifier_free_guidance (`bool`):
whether to use classifier free guidance or not
negative_prompt (`str` or `List[str]`, *optional*):
The prompt or prompts not to guide the image generation. If not defined, one has to pass
`negative_prompt_embeds` instead. Ignored when not using guidance (i.e., ignored if `guidance_scale` is
less than `1`).
prompt_embeds (`torch.FloatTensor`, *optional*):
Pre-generated text embeddings. Can be used to easily tweak text inputs, *e.g.* prompt weighting. If not
provided, text embeddings will be generated from `prompt` input argument.
negative_prompt_embeds (`torch.FloatTensor`, *optional*):
Pre-generated negative text embeddings. Can be used to easily tweak text inputs, *e.g.* prompt
weighting. If not provided, negative_prompt_embeds will be generated from `negative_prompt` input
argument.
lora_scale (`float`, *optional*):
A LoRA scale that will be applied to all LoRA layers of the text encoder if LoRA layers are loaded.
clip_skip (`int`, *optional*):
Number of layers to be skipped from CLIP while computing the prompt embeddings. A value of 1 means that
the output of the pre-final layer will be used for computing the prompt embeddings.
"""
# set lora scale so that monkey patched LoRA
# function of text encoder can correctly access it
if lora_scale is not None and isinstance(self, LoraLoaderMixin):
self._lora_scale = lora_scale
# dynamically adjust the LoRA scale
if not USE_PEFT_BACKEND:
adjust_lora_scale_text_encoder(self.text_encoder, lora_scale)
else:
scale_lora_layers(self.text_encoder, lora_scale)
if prompt is not None and isinstance(prompt, str):
batch_size = 1
elif prompt is not None and isinstance(prompt, list):
batch_size = len(prompt)
else:
batch_size = prompt_embeds.shape[0]
if prompt_embeds is None:
# textual inversion: procecss multi-vector tokens if necessary
if isinstance(self, TextualInversionLoaderMixin):
prompt = self.maybe_convert_prompt(prompt, self.tokenizer)
text_inputs = self.tokenizer(
prompt,
padding="max_length",
max_length=self.tokenizer.model_max_length,
truncation=True,
return_tensors="pt",
)
text_input_ids = text_inputs.input_ids
untruncated_ids = self.tokenizer(prompt, padding="longest", return_tensors="pt").input_ids
if untruncated_ids.shape[-1] >= text_input_ids.shape[-1] and not torch.equal(
text_input_ids, untruncated_ids
):
removed_text = self.tokenizer.batch_decode(
untruncated_ids[:, self.tokenizer.model_max_length - 1 : -1]
)
logger.warning(
"The following part of your input was truncated because CLIP can only handle sequences up to"
f" {self.tokenizer.model_max_length} tokens: {removed_text}"
)
if hasattr(self.text_encoder.config, "use_attention_mask") and self.text_encoder.config.use_attention_mask:
attention_mask = text_inputs.attention_mask.to(device)
else:
attention_mask = None
if clip_skip is None:
prompt_embeds = self.text_encoder(text_input_ids.to(device), attention_mask=attention_mask)
prompt_embeds = prompt_embeds[0]
else:
prompt_embeds = self.text_encoder(
text_input_ids.to(device), attention_mask=attention_mask, output_hidden_states=True
)
# Access the `hidden_states` first, that contains a tuple of
# all the hidden states from the encoder layers. Then index into
# the tuple to access the hidden states from the desired layer.
prompt_embeds = prompt_embeds[-1][-(clip_skip + 1)]
# We also need to apply the final LayerNorm here to not mess with the
# representations. The `last_hidden_states` that we typically use for
# obtaining the final prompt representations passes through the LayerNorm
# layer.
prompt_embeds = self.text_encoder.text_model.final_layer_norm(prompt_embeds)
if self.text_encoder is not None:
prompt_embeds_dtype = self.text_encoder.dtype
elif self.unet is not None:
prompt_embeds_dtype = self.unet.dtype
else:
prompt_embeds_dtype = prompt_embeds.dtype
prompt_embeds = prompt_embeds.to(dtype=prompt_embeds_dtype, device=device)
bs_embed, seq_len, _ = prompt_embeds.shape
# duplicate text embeddings for each generation per prompt, using mps friendly method
prompt_embeds = prompt_embeds.repeat(1, num_images_per_prompt, 1)
prompt_embeds = prompt_embeds.view(bs_embed * num_images_per_prompt, seq_len, -1)
# get unconditional embeddings for classifier free guidance
if do_classifier_free_guidance and negative_prompt_embeds is None:
uncond_tokens: List[str]
if negative_prompt is None:
uncond_tokens = [""] * batch_size
elif prompt is not None and type(prompt) is not type(negative_prompt):
raise TypeError(
f"`negative_prompt` should be the same type to `prompt`, but got {type(negative_prompt)} !="
f" {type(prompt)}."
)
elif isinstance(negative_prompt, str):
uncond_tokens = [negative_prompt]
elif batch_size != len(negative_prompt):
raise ValueError(
f"`negative_prompt`: {negative_prompt} has batch size {len(negative_prompt)}, but `prompt`:"
f" {prompt} has batch size {batch_size}. Please make sure that passed `negative_prompt` matches"
" the batch size of `prompt`."
)
else:
uncond_tokens = negative_prompt
# textual inversion: procecss multi-vector tokens if necessary
if isinstance(self, TextualInversionLoaderMixin):
uncond_tokens = self.maybe_convert_prompt(uncond_tokens, self.tokenizer)
max_length = prompt_embeds.shape[1]
uncond_input = self.tokenizer(
uncond_tokens,
padding="max_length",
max_length=max_length,
truncation=True,
return_tensors="pt",
)
if hasattr(self.text_encoder.config, "use_attention_mask") and self.text_encoder.config.use_attention_mask:
attention_mask = uncond_input.attention_mask.to(device)
else:
attention_mask = None
negative_prompt_embeds = self.text_encoder(
uncond_input.input_ids.to(device),
attention_mask=attention_mask,
)
negative_prompt_embeds = negative_prompt_embeds[0]
if do_classifier_free_guidance:
# duplicate unconditional embeddings for each generation per prompt, using mps friendly method
seq_len = negative_prompt_embeds.shape[1]
negative_prompt_embeds = negative_prompt_embeds.to(dtype=prompt_embeds_dtype, device=device)
negative_prompt_embeds = negative_prompt_embeds.repeat(1, num_images_per_prompt, 1)
negative_prompt_embeds = negative_prompt_embeds.view(batch_size * num_images_per_prompt, seq_len, -1)
if isinstance(self, LoraLoaderMixin) and USE_PEFT_BACKEND:
# Retrieve the original scale by scaling back the LoRA layers
unscale_lora_layers(self.text_encoder, lora_scale)
return prompt_embeds, negative_prompt_embeds
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion.StableDiffusionPipeline.encode_image
def encode_image(self, image, device, num_images_per_prompt, output_hidden_states=None):
dtype = next(self.image_encoder.parameters()).dtype
if not isinstance(image, torch.Tensor):
image = self.feature_extractor(image, return_tensors="pt").pixel_values
image = image.to(device=device, dtype=dtype)
if output_hidden_states:
image_enc_hidden_states = self.image_encoder(image, output_hidden_states=True).hidden_states[-2]
image_enc_hidden_states = image_enc_hidden_states.repeat_interleave(num_images_per_prompt, dim=0)
uncond_image_enc_hidden_states = self.image_encoder(
torch.zeros_like(image), output_hidden_states=True
).hidden_states[-2]
uncond_image_enc_hidden_states = uncond_image_enc_hidden_states.repeat_interleave(
num_images_per_prompt, dim=0
)
return image_enc_hidden_states, uncond_image_enc_hidden_states
else:
image_embeds = self.image_encoder(image).image_embeds
image_embeds = image_embeds.repeat_interleave(num_images_per_prompt, dim=0)
uncond_image_embeds = torch.zeros_like(image_embeds)
return image_embeds, uncond_image_embeds
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion.StableDiffusionPipeline.prepare_ip_adapter_image_embeds
def prepare_ip_adapter_image_embeds(self, ip_adapter_image, device, num_images_per_prompt):
if not isinstance(ip_adapter_image, list):
ip_adapter_image = [ip_adapter_image]
if len(ip_adapter_image) != len(self.unet.encoder_hid_proj.image_projection_layers):
raise ValueError(
f"`ip_adapter_image` must have same length as the number of IP Adapters. Got {len(ip_adapter_image)} images and {len(self.unet.encoder_hid_proj.image_projection_layers)} IP Adapters."
)
image_embeds = []
for single_ip_adapter_image, image_proj_layer in zip(
ip_adapter_image, self.unet.encoder_hid_proj.image_projection_layers
):
output_hidden_state = not isinstance(image_proj_layer, ImageProjection)
single_image_embeds, single_negative_image_embeds = self.encode_image(
single_ip_adapter_image, device, 1, output_hidden_state
)
single_image_embeds = torch.stack([single_image_embeds] * num_images_per_prompt, dim=0)
single_negative_image_embeds = torch.stack([single_negative_image_embeds] * num_images_per_prompt, dim=0)
if self.do_classifier_free_guidance:
single_image_embeds = torch.cat([single_negative_image_embeds, single_image_embeds])
single_image_embeds = single_image_embeds.to(device)
image_embeds.append(single_image_embeds)
return image_embeds
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion.StableDiffusionPipeline.run_safety_checker
def run_safety_checker(self, image, device, dtype):
if self.safety_checker is None:
has_nsfw_concept = None
else:
if torch.is_tensor(image):
feature_extractor_input = self.image_processor.postprocess(image, output_type="pil")
else:
feature_extractor_input = self.image_processor.numpy_to_pil(image)
safety_checker_input = self.feature_extractor(feature_extractor_input, return_tensors="pt").to(device)
image, has_nsfw_concept = self.safety_checker(
images=image, clip_input=safety_checker_input.pixel_values.to(dtype)
)
return image, has_nsfw_concept
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion_img2img.StableDiffusionImg2ImgPipeline.prepare_latents
def prepare_latents(self, image, timestep, batch_size, num_images_per_prompt, dtype, device, generator=None):
if not isinstance(image, (torch.Tensor, PIL.Image.Image, list)):
raise ValueError(
f"`image` has to be of type `torch.Tensor`, `PIL.Image.Image` or list but is {type(image)}"
)
image = image.to(device=device, dtype=dtype)
batch_size = batch_size * num_images_per_prompt
if image.shape[1] == 4:
init_latents = image
else:
if isinstance(generator, list) and len(generator) != batch_size:
raise ValueError(
f"You have passed a list of generators of length {len(generator)}, but requested an effective batch"
f" size of {batch_size}. Make sure the batch size matches the length of the generators."
)
elif isinstance(generator, list):
init_latents = [
retrieve_latents(self.vae.encode(image[i : i + 1]), generator=generator[i])
for i in range(batch_size)
]
init_latents = torch.cat(init_latents, dim=0)
else:
init_latents = retrieve_latents(self.vae.encode(image), generator=generator)
init_latents = self.vae.config.scaling_factor * init_latents
if batch_size > init_latents.shape[0] and batch_size % init_latents.shape[0] == 0:
# expand init_latents for batch_size
deprecation_message = (
f"You have passed {batch_size} text prompts (`prompt`), but only {init_latents.shape[0]} initial"
" images (`image`). Initial images are now duplicating to match the number of text prompts. Note"
" that this behavior is deprecated and will be removed in a version 1.0.0. Please make sure to update"
" your script to pass as many initial images as text prompts to suppress this warning."
)
deprecate("len(prompt) != len(image)", "1.0.0", deprecation_message, standard_warn=False)
additional_image_per_prompt = batch_size // init_latents.shape[0]
init_latents = torch.cat([init_latents] * additional_image_per_prompt, dim=0)
elif batch_size > init_latents.shape[0] and batch_size % init_latents.shape[0] != 0:
raise ValueError(
f"Cannot duplicate `image` of batch size {init_latents.shape[0]} to {batch_size} text prompts."
)
else:
init_latents = torch.cat([init_latents], dim=0)
shape = init_latents.shape
noise = randn_tensor(shape, generator=generator, device=device, dtype=dtype)
# get latents
init_latents = self.scheduler.add_noise(init_latents, noise, timestep)
latents = init_latents
return latents
# Copied from diffusers.pipelines.latent_consistency_models.pipeline_latent_consistency_text2img.LatentConsistencyModelPipeline.get_guidance_scale_embedding
def get_guidance_scale_embedding(self, w, embedding_dim=512, dtype=torch.float32):
"""
See https://github.com/google-research/vdm/blob/dc27b98a554f65cdc654b800da5aa1846545d41b/model_vdm.py#L298
Args:
timesteps (`torch.Tensor`):
generate embedding vectors at these timesteps
embedding_dim (`int`, *optional*, defaults to 512):
dimension of the embeddings to generate
dtype:
data type of the generated embeddings
Returns:
`torch.FloatTensor`: Embedding vectors with shape `(len(timesteps), embedding_dim)`
"""
assert len(w.shape) == 1
w = w * 1000.0
half_dim = embedding_dim // 2
emb = torch.log(torch.tensor(10000.0)) / (half_dim - 1)
emb = torch.exp(torch.arange(half_dim, dtype=dtype) * -emb)
emb = w.to(dtype)[:, None] * emb[None, :]
emb = torch.cat([torch.sin(emb), torch.cos(emb)], dim=1)
if embedding_dim % 2 == 1: # zero pad
emb = torch.nn.functional.pad(emb, (0, 1))
assert emb.shape == (w.shape[0], embedding_dim)
return emb
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion.StableDiffusionPipeline.prepare_extra_step_kwargs
def prepare_extra_step_kwargs(self, generator, eta):
# prepare extra kwargs for the scheduler step, since not all schedulers have the same signature
# eta (η) is only used with the DDIMScheduler, it will be ignored for other schedulers.
# eta corresponds to η in DDIM paper: https://arxiv.org/abs/2010.02502
# and should be between [0, 1]
accepts_eta = "eta" in set(inspect.signature(self.scheduler.step).parameters.keys())
extra_step_kwargs = {}
if accepts_eta:
extra_step_kwargs["eta"] = eta
# check if the scheduler accepts generator
accepts_generator = "generator" in set(inspect.signature(self.scheduler.step).parameters.keys())
if accepts_generator:
extra_step_kwargs["generator"] = generator
return extra_step_kwargs
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion_img2img.StableDiffusionImg2ImgPipeline.get_timesteps
def get_timesteps(self, num_inference_steps, strength, device):
# get the original timestep using init_timestep
init_timestep = min(int(num_inference_steps * strength), num_inference_steps)
t_start = max(num_inference_steps - init_timestep, 0)
timesteps = self.scheduler.timesteps[t_start * self.scheduler.order :]
if hasattr(self.scheduler, "set_begin_index"):
self.scheduler.set_begin_index(t_start * self.scheduler.order)
return timesteps, num_inference_steps - t_start
def check_inputs(
self,
prompt: Union[str, List[str]],
strength: float,
callback_steps: int,
prompt_embeds: Optional[torch.FloatTensor] = None,
callback_on_step_end_tensor_inputs=None,
):
if strength < 0 or strength > 1:
raise ValueError(f"The value of strength should in [0.0, 1.0] but is {strength}")
if callback_steps is not None and (not isinstance(callback_steps, int) or callback_steps <= 0):
raise ValueError(
f"`callback_steps` has to be a positive integer but is {callback_steps} of type"
f" {type(callback_steps)}."
)
if callback_on_step_end_tensor_inputs is not None and not all(
k in self._callback_tensor_inputs for k in callback_on_step_end_tensor_inputs
):
raise ValueError(
f"`callback_on_step_end_tensor_inputs` has to be in {self._callback_tensor_inputs}, but found {[k for k in callback_on_step_end_tensor_inputs if k not in self._callback_tensor_inputs]}"
)
if prompt is not None and prompt_embeds is not None:
raise ValueError(
f"Cannot forward both `prompt`: {prompt} and `prompt_embeds`: {prompt_embeds}. Please make sure to"
" only forward one of the two."
)
elif prompt is None and prompt_embeds is None:
raise ValueError(
"Provide either `prompt` or `prompt_embeds`. Cannot leave both `prompt` and `prompt_embeds` undefined."
)
elif prompt is not None and (not isinstance(prompt, str) and not isinstance(prompt, list)):
raise ValueError(f"`prompt` has to be of type `str` or `list` but is {type(prompt)}")
@property
def guidance_scale(self):
return self._guidance_scale
@property
def cross_attention_kwargs(self):
return self._cross_attention_kwargs
@property
def clip_skip(self):
return self._clip_skip
@property
def num_timesteps(self):
return self._num_timesteps
@torch.no_grad()
@replace_example_docstring(EXAMPLE_DOC_STRING)
def __call__(
self,
prompt: Union[str, List[str]] = None,
image: PipelineImageInput = None,
num_inference_steps: int = 4,
strength: float = 0.8,
original_inference_steps: int = None,
timesteps: List[int] = None,
guidance_scale: float = 8.5,
num_images_per_prompt: Optional[int] = 1,
generator: Optional[Union[torch.Generator, List[torch.Generator]]] = None,
latents: Optional[torch.FloatTensor] = None,
prompt_embeds: Optional[torch.FloatTensor] = None,
ip_adapter_image: Optional[PipelineImageInput] = None,
output_type: Optional[str] = "pil",
return_dict: bool = True,
cross_attention_kwargs: Optional[Dict[str, Any]] = None,
clip_skip: Optional[int] = None,
callback_on_step_end: Optional[Callable[[int, int, Dict], None]] = None,
callback_on_step_end_tensor_inputs: List[str] = ["latents"],
**kwargs,
):
r"""
The call function to the pipeline for generation.
Args:
prompt (`str` or `List[str]`, *optional*):
The prompt or prompts to guide image generation. If not defined, you need to pass `prompt_embeds`.
height (`int`, *optional*, defaults to `self.unet.config.sample_size * self.vae_scale_factor`):
The height in pixels of the generated image.
width (`int`, *optional*, defaults to `self.unet.config.sample_size * self.vae_scale_factor`):
The width in pixels of the generated image.
num_inference_steps (`int`, *optional*, defaults to 50):
The number of denoising steps. More denoising steps usually lead to a higher quality image at the
expense of slower inference.
original_inference_steps (`int`, *optional*):
The original number of inference steps use to generate a linearly-spaced timestep schedule, from which
we will draw `num_inference_steps` evenly spaced timesteps from as our final timestep schedule,
following the Skipping-Step method in the paper (see Section 4.3). If not set this will default to the
scheduler's `original_inference_steps` attribute.
timesteps (`List[int]`, *optional*):
Custom timesteps to use for the denoising process. If not defined, equal spaced `num_inference_steps`
timesteps on the original LCM training/distillation timestep schedule are used. Must be in descending
order.
guidance_scale (`float`, *optional*, defaults to 7.5):
A higher guidance scale value encourages the model to generate images closely linked to the text
`prompt` at the expense of lower image quality. Guidance scale is enabled when `guidance_scale > 1`.
Note that the original latent consistency models paper uses a different CFG formulation where the
guidance scales are decreased by 1 (so in the paper formulation CFG is enabled when `guidance_scale >
0`).
num_images_per_prompt (`int`, *optional*, defaults to 1):
The number of images to generate per prompt.
generator (`torch.Generator` or `List[torch.Generator]`, *optional*):
A [`torch.Generator`](https://pytorch.org/docs/stable/generated/torch.Generator.html) to make
generation deterministic.
latents (`torch.FloatTensor`, *optional*):
Pre-generated noisy latents sampled from a Gaussian distribution, to be used as inputs for image
generation. Can be used to tweak the same generation with different prompts. If not provided, a latents
tensor is generated by sampling using the supplied random `generator`.
prompt_embeds (`torch.FloatTensor`, *optional*):
Pre-generated text embeddings. Can be used to easily tweak text inputs (prompt weighting). If not
provided, text embeddings are generated from the `prompt` input argument.
ip_adapter_image: (`PipelineImageInput`, *optional*):
Optional image input to work with IP Adapters.
output_type (`str`, *optional*, defaults to `"pil"`):
The output format of the generated image. Choose between `PIL.Image` or `np.array`.
return_dict (`bool`, *optional*, defaults to `True`):
Whether or not to return a [`~pipelines.stable_diffusion.StableDiffusionPipelineOutput`] instead of a
plain tuple.
cross_attention_kwargs (`dict`, *optional*):
A kwargs dictionary that if specified is passed along to the [`AttentionProcessor`] as defined in
[`self.processor`](https://github.com/huggingface/diffusers/blob/main/src/diffusers/models/attention_processor.py).
clip_skip (`int`, *optional*):
Number of layers to be skipped from CLIP while computing the prompt embeddings. A value of 1 means that
the output of the pre-final layer will be used for computing the prompt embeddings.
callback_on_step_end (`Callable`, *optional*):
A function that calls at the end of each denoising steps during the inference. The function is called
with the following arguments: `callback_on_step_end(self: DiffusionPipeline, step: int, timestep: int,
callback_kwargs: Dict)`. `callback_kwargs` will include a list of all tensors as specified by
`callback_on_step_end_tensor_inputs`.
callback_on_step_end_tensor_inputs (`List`, *optional*):
The list of tensor inputs for the `callback_on_step_end` function. The tensors specified in the list
will be passed as `callback_kwargs` argument. You will only be able to include variables listed in the
`._callback_tensor_inputs` attribute of your pipeline class.
Examples:
Returns:
[`~pipelines.stable_diffusion.StableDiffusionPipelineOutput`] or `tuple`:
If `return_dict` is `True`, [`~pipelines.stable_diffusion.StableDiffusionPipelineOutput`] is returned,
otherwise a `tuple` is returned where the first element is a list with the generated images and the
second element is a list of `bool`s indicating whether the corresponding generated image contains
"not-safe-for-work" (nsfw) content.
"""
callback = kwargs.pop("callback", None)
callback_steps = kwargs.pop("callback_steps", None)
if callback is not None:
deprecate(
"callback",
"1.0.0",
"Passing `callback` as an input argument to `__call__` is deprecated, consider use `callback_on_step_end`",
)
if callback_steps is not None:
deprecate(
"callback_steps",
"1.0.0",
"Passing `callback_steps` as an input argument to `__call__` is deprecated, consider use `callback_on_step_end`",
)
# 1. Check inputs. Raise error if not correct
self.check_inputs(prompt, strength, callback_steps, prompt_embeds, callback_on_step_end_tensor_inputs)
self._guidance_scale = guidance_scale
self._clip_skip = clip_skip
self._cross_attention_kwargs = cross_attention_kwargs
# 2. Define call parameters
if prompt is not None and isinstance(prompt, str):
batch_size = 1
elif prompt is not None and isinstance(prompt, list):
batch_size = len(prompt)
else:
batch_size = prompt_embeds.shape[0]
device = self._execution_device
# do_classifier_free_guidance = guidance_scale > 1.0
if ip_adapter_image is not None:
image_embeds = self.prepare_ip_adapter_image_embeds(
ip_adapter_image, device, batch_size * num_images_per_prompt
)
# 3. Encode input prompt
lora_scale = (
self.cross_attention_kwargs.get("scale", None) if self.cross_attention_kwargs is not None else None
)
# NOTE: when a LCM is distilled from an LDM via latent consistency distillation (Algorithm 1) with guided
# distillation, the forward pass of the LCM learns to approximate sampling from the LDM using CFG with the
# unconditional prompt "" (the empty string). Due to this, LCMs currently do not support negative prompts.
prompt_embeds, _ = self.encode_prompt(
prompt,
device,
num_images_per_prompt,
False,
negative_prompt=None,
prompt_embeds=prompt_embeds,
negative_prompt_embeds=None,
lora_scale=lora_scale,
clip_skip=self.clip_skip,
)
# 4. Encode image
image = self.image_processor.preprocess(image)
# 5. Prepare timesteps
timesteps, num_inference_steps = retrieve_timesteps(
self.scheduler,
num_inference_steps,
device,
timesteps,
original_inference_steps=original_inference_steps,
strength=strength,
)
# 6. Prepare latent variables
original_inference_steps = (
original_inference_steps
if original_inference_steps is not None
else self.scheduler.config.original_inference_steps
)
latent_timestep = timesteps[:1]
latents = self.prepare_latents(
image, latent_timestep, batch_size, num_images_per_prompt, prompt_embeds.dtype, device, generator
)
bs = batch_size * num_images_per_prompt
# 6. Get Guidance Scale Embedding
# NOTE: We use the Imagen CFG formulation that StableDiffusionPipeline uses rather than the original LCM paper
# CFG formulation, so we need to subtract 1 from the input guidance_scale.
# LCM CFG formulation: cfg_noise = noise_cond + cfg_scale * (noise_cond - noise_uncond), (cfg_scale > 0.0 using CFG)
w = torch.tensor(self.guidance_scale - 1).repeat(bs)
w_embedding = self.get_guidance_scale_embedding(w, embedding_dim=self.unet.config.time_cond_proj_dim).to(
device=device, dtype=latents.dtype
)
# 7. Prepare extra step kwargs. TODO: Logic should ideally just be moved out of the pipeline
extra_step_kwargs = self.prepare_extra_step_kwargs(generator, None)
# 7.1 Add image embeds for IP-Adapter
added_cond_kwargs = {"image_embeds": image_embeds} if ip_adapter_image is not None else None
# 8. LCM Multistep Sampling Loop
num_warmup_steps = len(timesteps) - num_inference_steps * self.scheduler.order
self._num_timesteps = len(timesteps)
with self.progress_bar(total=num_inference_steps) as progress_bar:
for i, t in enumerate(timesteps):
latents = latents.to(prompt_embeds.dtype)
# model prediction (v-prediction, eps, x)
model_pred = self.unet(
latents,
t,
timestep_cond=w_embedding,
encoder_hidden_states=prompt_embeds,
cross_attention_kwargs=self.cross_attention_kwargs,
added_cond_kwargs=added_cond_kwargs,
return_dict=False,
)[0]
# compute the previous noisy sample x_t -> x_t-1
latents, denoised = self.scheduler.step(model_pred, t, latents, **extra_step_kwargs, return_dict=False)
if callback_on_step_end is not None:
callback_kwargs = {}
for k in callback_on_step_end_tensor_inputs:
callback_kwargs[k] = locals()[k]
callback_outputs = callback_on_step_end(self, i, t, callback_kwargs)
latents = callback_outputs.pop("latents", latents)
prompt_embeds = callback_outputs.pop("prompt_embeds", prompt_embeds)
w_embedding = callback_outputs.pop("w_embedding", w_embedding)
denoised = callback_outputs.pop("denoised", denoised)
# call the callback, if provided
if i == len(timesteps) - 1 or ((i + 1) > num_warmup_steps and (i + 1) % self.scheduler.order == 0):
progress_bar.update()
if callback is not None and i % callback_steps == 0:
step_idx = i // getattr(self.scheduler, "order", 1)
callback(step_idx, t, latents)
denoised = denoised.to(prompt_embeds.dtype)
if not output_type == "latent":
image = self.vae.decode(denoised / self.vae.config.scaling_factor, return_dict=False)[0]
image, has_nsfw_concept = self.run_safety_checker(image, device, prompt_embeds.dtype)
else:
image = denoised
has_nsfw_concept = None
if has_nsfw_concept is None:
do_denormalize = [True] * image.shape[0]
else:
do_denormalize = [not has_nsfw for has_nsfw in has_nsfw_concept]
image = self.image_processor.postprocess(image, output_type=output_type, do_denormalize=do_denormalize)
# Offload all models
self.maybe_free_model_hooks()
if not return_dict:
return (image, has_nsfw_concept)
return StableDiffusionPipelineOutput(images=image, nsfw_content_detected=has_nsfw_concept)
| diffusers/src/diffusers/pipelines/latent_consistency_models/pipeline_latent_consistency_img2img.py/0 | {
"file_path": "diffusers/src/diffusers/pipelines/latent_consistency_models/pipeline_latent_consistency_img2img.py",
"repo_id": "diffusers",
"token_count": 20567
} | 117 |
# Copyright 2023 PixArt-Alpha Authors and The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import html
import inspect
import re
import urllib.parse as ul
from typing import Callable, List, Optional, Tuple, Union
import torch
import torch.nn.functional as F
from transformers import T5EncoderModel, T5Tokenizer
from ...image_processor import VaeImageProcessor
from ...models import AutoencoderKL, Transformer2DModel
from ...schedulers import DPMSolverMultistepScheduler
from ...utils import (
BACKENDS_MAPPING,
deprecate,
is_bs4_available,
is_ftfy_available,
logging,
replace_example_docstring,
)
from ...utils.torch_utils import randn_tensor
from ..pipeline_utils import DiffusionPipeline, ImagePipelineOutput
logger = logging.get_logger(__name__) # pylint: disable=invalid-name
if is_bs4_available():
from bs4 import BeautifulSoup
if is_ftfy_available():
import ftfy
EXAMPLE_DOC_STRING = """
Examples:
```py
>>> import torch
>>> from diffusers import PixArtAlphaPipeline
>>> # You can replace the checkpoint id with "PixArt-alpha/PixArt-XL-2-512x512" too.
>>> pipe = PixArtAlphaPipeline.from_pretrained("PixArt-alpha/PixArt-XL-2-1024-MS", torch_dtype=torch.float16)
>>> # Enable memory optimizations.
>>> pipe.enable_model_cpu_offload()
>>> prompt = "A small cactus with a happy face in the Sahara desert."
>>> image = pipe(prompt).images[0]
```
"""
ASPECT_RATIO_1024_BIN = {
"0.25": [512.0, 2048.0],
"0.28": [512.0, 1856.0],
"0.32": [576.0, 1792.0],
"0.33": [576.0, 1728.0],
"0.35": [576.0, 1664.0],
"0.4": [640.0, 1600.0],
"0.42": [640.0, 1536.0],
"0.48": [704.0, 1472.0],
"0.5": [704.0, 1408.0],
"0.52": [704.0, 1344.0],
"0.57": [768.0, 1344.0],
"0.6": [768.0, 1280.0],
"0.68": [832.0, 1216.0],
"0.72": [832.0, 1152.0],
"0.78": [896.0, 1152.0],
"0.82": [896.0, 1088.0],
"0.88": [960.0, 1088.0],
"0.94": [960.0, 1024.0],
"1.0": [1024.0, 1024.0],
"1.07": [1024.0, 960.0],
"1.13": [1088.0, 960.0],
"1.21": [1088.0, 896.0],
"1.29": [1152.0, 896.0],
"1.38": [1152.0, 832.0],
"1.46": [1216.0, 832.0],
"1.67": [1280.0, 768.0],
"1.75": [1344.0, 768.0],
"2.0": [1408.0, 704.0],
"2.09": [1472.0, 704.0],
"2.4": [1536.0, 640.0],
"2.5": [1600.0, 640.0],
"3.0": [1728.0, 576.0],
"4.0": [2048.0, 512.0],
}
ASPECT_RATIO_512_BIN = {
"0.25": [256.0, 1024.0],
"0.28": [256.0, 928.0],
"0.32": [288.0, 896.0],
"0.33": [288.0, 864.0],
"0.35": [288.0, 832.0],
"0.4": [320.0, 800.0],
"0.42": [320.0, 768.0],
"0.48": [352.0, 736.0],
"0.5": [352.0, 704.0],
"0.52": [352.0, 672.0],
"0.57": [384.0, 672.0],
"0.6": [384.0, 640.0],
"0.68": [416.0, 608.0],
"0.72": [416.0, 576.0],
"0.78": [448.0, 576.0],
"0.82": [448.0, 544.0],
"0.88": [480.0, 544.0],
"0.94": [480.0, 512.0],
"1.0": [512.0, 512.0],
"1.07": [512.0, 480.0],
"1.13": [544.0, 480.0],
"1.21": [544.0, 448.0],
"1.29": [576.0, 448.0],
"1.38": [576.0, 416.0],
"1.46": [608.0, 416.0],
"1.67": [640.0, 384.0],
"1.75": [672.0, 384.0],
"2.0": [704.0, 352.0],
"2.09": [736.0, 352.0],
"2.4": [768.0, 320.0],
"2.5": [800.0, 320.0],
"3.0": [864.0, 288.0],
"4.0": [1024.0, 256.0],
}
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion.retrieve_timesteps
def retrieve_timesteps(
scheduler,
num_inference_steps: Optional[int] = None,
device: Optional[Union[str, torch.device]] = None,
timesteps: Optional[List[int]] = None,
**kwargs,
):
"""
Calls the scheduler's `set_timesteps` method and retrieves timesteps from the scheduler after the call. Handles
custom timesteps. Any kwargs will be supplied to `scheduler.set_timesteps`.
Args:
scheduler (`SchedulerMixin`):
The scheduler to get timesteps from.
num_inference_steps (`int`):
The number of diffusion steps used when generating samples with a pre-trained model. If used,
`timesteps` must be `None`.
device (`str` or `torch.device`, *optional*):
The device to which the timesteps should be moved to. If `None`, the timesteps are not moved.
timesteps (`List[int]`, *optional*):
Custom timesteps used to support arbitrary spacing between timesteps. If `None`, then the default
timestep spacing strategy of the scheduler is used. If `timesteps` is passed, `num_inference_steps`
must be `None`.
Returns:
`Tuple[torch.Tensor, int]`: A tuple where the first element is the timestep schedule from the scheduler and the
second element is the number of inference steps.
"""
if timesteps is not None:
accepts_timesteps = "timesteps" in set(inspect.signature(scheduler.set_timesteps).parameters.keys())
if not accepts_timesteps:
raise ValueError(
f"The current scheduler class {scheduler.__class__}'s `set_timesteps` does not support custom"
f" timestep schedules. Please check whether you are using the correct scheduler."
)
scheduler.set_timesteps(timesteps=timesteps, device=device, **kwargs)
timesteps = scheduler.timesteps
num_inference_steps = len(timesteps)
else:
scheduler.set_timesteps(num_inference_steps, device=device, **kwargs)
timesteps = scheduler.timesteps
return timesteps, num_inference_steps
class PixArtAlphaPipeline(DiffusionPipeline):
r"""
Pipeline for text-to-image generation using PixArt-Alpha.
This model inherits from [`DiffusionPipeline`]. Check the superclass documentation for the generic methods the
library implements for all the pipelines (such as downloading or saving, running on a particular device, etc.)
Args:
vae ([`AutoencoderKL`]):
Variational Auto-Encoder (VAE) Model to encode and decode images to and from latent representations.
text_encoder ([`T5EncoderModel`]):
Frozen text-encoder. PixArt-Alpha uses
[T5](https://huggingface.co/docs/transformers/model_doc/t5#transformers.T5EncoderModel), specifically the
[t5-v1_1-xxl](https://huggingface.co/PixArt-alpha/PixArt-alpha/tree/main/t5-v1_1-xxl) variant.
tokenizer (`T5Tokenizer`):
Tokenizer of class
[T5Tokenizer](https://huggingface.co/docs/transformers/model_doc/t5#transformers.T5Tokenizer).
transformer ([`Transformer2DModel`]):
A text conditioned `Transformer2DModel` to denoise the encoded image latents.
scheduler ([`SchedulerMixin`]):
A scheduler to be used in combination with `transformer` to denoise the encoded image latents.
"""
bad_punct_regex = re.compile(
r"["
+ "#®•©™&@·º½¾¿¡§~"
+ r"\)"
+ r"\("
+ r"\]"
+ r"\["
+ r"\}"
+ r"\{"
+ r"\|"
+ "\\"
+ r"\/"
+ r"\*"
+ r"]{1,}"
) # noqa
_optional_components = ["tokenizer", "text_encoder"]
model_cpu_offload_seq = "text_encoder->transformer->vae"
def __init__(
self,
tokenizer: T5Tokenizer,
text_encoder: T5EncoderModel,
vae: AutoencoderKL,
transformer: Transformer2DModel,
scheduler: DPMSolverMultistepScheduler,
):
super().__init__()
self.register_modules(
tokenizer=tokenizer, text_encoder=text_encoder, vae=vae, transformer=transformer, scheduler=scheduler
)
self.vae_scale_factor = 2 ** (len(self.vae.config.block_out_channels) - 1)
self.image_processor = VaeImageProcessor(vae_scale_factor=self.vae_scale_factor)
# Adapted from https://github.com/PixArt-alpha/PixArt-alpha/blob/master/diffusion/model/utils.py
def mask_text_embeddings(self, emb, mask):
if emb.shape[0] == 1:
keep_index = mask.sum().item()
return emb[:, :, :keep_index, :], keep_index
else:
masked_feature = emb * mask[:, None, :, None]
return masked_feature, emb.shape[2]
# Adapted from diffusers.pipelines.deepfloyd_if.pipeline_if.encode_prompt
def encode_prompt(
self,
prompt: Union[str, List[str]],
do_classifier_free_guidance: bool = True,
negative_prompt: str = "",
num_images_per_prompt: int = 1,
device: Optional[torch.device] = None,
prompt_embeds: Optional[torch.FloatTensor] = None,
negative_prompt_embeds: Optional[torch.FloatTensor] = None,
prompt_attention_mask: Optional[torch.FloatTensor] = None,
negative_prompt_attention_mask: Optional[torch.FloatTensor] = None,
clean_caption: bool = False,
**kwargs,
):
r"""
Encodes the prompt into text encoder hidden states.
Args:
prompt (`str` or `List[str]`, *optional*):
prompt to be encoded
negative_prompt (`str` or `List[str]`, *optional*):
The prompt not to guide the image generation. If not defined, one has to pass `negative_prompt_embeds`
instead. Ignored when not using guidance (i.e., ignored if `guidance_scale` is less than `1`). For
PixArt-Alpha, this should be "".
do_classifier_free_guidance (`bool`, *optional*, defaults to `True`):
whether to use classifier free guidance or not
num_images_per_prompt (`int`, *optional*, defaults to 1):
number of images that should be generated per prompt
device: (`torch.device`, *optional*):
torch device to place the resulting embeddings on
prompt_embeds (`torch.FloatTensor`, *optional*):
Pre-generated text embeddings. Can be used to easily tweak text inputs, *e.g.* prompt weighting. If not
provided, text embeddings will be generated from `prompt` input argument.
negative_prompt_embeds (`torch.FloatTensor`, *optional*):
Pre-generated negative text embeddings. For PixArt-Alpha, it's should be the embeddings of the ""
string.
clean_caption (bool, defaults to `False`):
If `True`, the function will preprocess and clean the provided caption before encoding.
"""
if "mask_feature" in kwargs:
deprecation_message = "The use of `mask_feature` is deprecated. It is no longer used in any computation and that doesn't affect the end results. It will be removed in a future version."
deprecate("mask_feature", "1.0.0", deprecation_message, standard_warn=False)
if device is None:
device = self._execution_device
if prompt is not None and isinstance(prompt, str):
batch_size = 1
elif prompt is not None and isinstance(prompt, list):
batch_size = len(prompt)
else:
batch_size = prompt_embeds.shape[0]
# See Section 3.1. of the paper.
max_length = 120
if prompt_embeds is None:
prompt = self._text_preprocessing(prompt, clean_caption=clean_caption)
text_inputs = self.tokenizer(
prompt,
padding="max_length",
max_length=max_length,
truncation=True,
add_special_tokens=True,
return_tensors="pt",
)
text_input_ids = text_inputs.input_ids
untruncated_ids = self.tokenizer(prompt, padding="longest", return_tensors="pt").input_ids
if untruncated_ids.shape[-1] >= text_input_ids.shape[-1] and not torch.equal(
text_input_ids, untruncated_ids
):
removed_text = self.tokenizer.batch_decode(untruncated_ids[:, max_length - 1 : -1])
logger.warning(
"The following part of your input was truncated because CLIP can only handle sequences up to"
f" {max_length} tokens: {removed_text}"
)
prompt_attention_mask = text_inputs.attention_mask
prompt_attention_mask = prompt_attention_mask.to(device)
prompt_embeds = self.text_encoder(text_input_ids.to(device), attention_mask=prompt_attention_mask)
prompt_embeds = prompt_embeds[0]
if self.text_encoder is not None:
dtype = self.text_encoder.dtype
elif self.transformer is not None:
dtype = self.transformer.dtype
else:
dtype = None
prompt_embeds = prompt_embeds.to(dtype=dtype, device=device)
bs_embed, seq_len, _ = prompt_embeds.shape
# duplicate text embeddings and attention mask for each generation per prompt, using mps friendly method
prompt_embeds = prompt_embeds.repeat(1, num_images_per_prompt, 1)
prompt_embeds = prompt_embeds.view(bs_embed * num_images_per_prompt, seq_len, -1)
prompt_attention_mask = prompt_attention_mask.view(bs_embed, -1)
prompt_attention_mask = prompt_attention_mask.repeat(num_images_per_prompt, 1)
# get unconditional embeddings for classifier free guidance
if do_classifier_free_guidance and negative_prompt_embeds is None:
uncond_tokens = [negative_prompt] * batch_size
uncond_tokens = self._text_preprocessing(uncond_tokens, clean_caption=clean_caption)
max_length = prompt_embeds.shape[1]
uncond_input = self.tokenizer(
uncond_tokens,
padding="max_length",
max_length=max_length,
truncation=True,
return_attention_mask=True,
add_special_tokens=True,
return_tensors="pt",
)
negative_prompt_attention_mask = uncond_input.attention_mask
negative_prompt_attention_mask = negative_prompt_attention_mask.to(device)
negative_prompt_embeds = self.text_encoder(
uncond_input.input_ids.to(device), attention_mask=negative_prompt_attention_mask
)
negative_prompt_embeds = negative_prompt_embeds[0]
if do_classifier_free_guidance:
# duplicate unconditional embeddings for each generation per prompt, using mps friendly method
seq_len = negative_prompt_embeds.shape[1]
negative_prompt_embeds = negative_prompt_embeds.to(dtype=dtype, device=device)
negative_prompt_embeds = negative_prompt_embeds.repeat(1, num_images_per_prompt, 1)
negative_prompt_embeds = negative_prompt_embeds.view(batch_size * num_images_per_prompt, seq_len, -1)
negative_prompt_attention_mask = negative_prompt_attention_mask.view(bs_embed, -1)
negative_prompt_attention_mask = negative_prompt_attention_mask.repeat(num_images_per_prompt, 1)
else:
negative_prompt_embeds = None
negative_prompt_attention_mask = None
return prompt_embeds, prompt_attention_mask, negative_prompt_embeds, negative_prompt_attention_mask
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion.StableDiffusionPipeline.prepare_extra_step_kwargs
def prepare_extra_step_kwargs(self, generator, eta):
# prepare extra kwargs for the scheduler step, since not all schedulers have the same signature
# eta (η) is only used with the DDIMScheduler, it will be ignored for other schedulers.
# eta corresponds to η in DDIM paper: https://arxiv.org/abs/2010.02502
# and should be between [0, 1]
accepts_eta = "eta" in set(inspect.signature(self.scheduler.step).parameters.keys())
extra_step_kwargs = {}
if accepts_eta:
extra_step_kwargs["eta"] = eta
# check if the scheduler accepts generator
accepts_generator = "generator" in set(inspect.signature(self.scheduler.step).parameters.keys())
if accepts_generator:
extra_step_kwargs["generator"] = generator
return extra_step_kwargs
def check_inputs(
self,
prompt,
height,
width,
negative_prompt,
callback_steps,
prompt_embeds=None,
negative_prompt_embeds=None,
prompt_attention_mask=None,
negative_prompt_attention_mask=None,
):
if height % 8 != 0 or width % 8 != 0:
raise ValueError(f"`height` and `width` have to be divisible by 8 but are {height} and {width}.")
if (callback_steps is None) or (
callback_steps is not None and (not isinstance(callback_steps, int) or callback_steps <= 0)
):
raise ValueError(
f"`callback_steps` has to be a positive integer but is {callback_steps} of type"
f" {type(callback_steps)}."
)
if prompt is not None and prompt_embeds is not None:
raise ValueError(
f"Cannot forward both `prompt`: {prompt} and `prompt_embeds`: {prompt_embeds}. Please make sure to"
" only forward one of the two."
)
elif prompt is None and prompt_embeds is None:
raise ValueError(
"Provide either `prompt` or `prompt_embeds`. Cannot leave both `prompt` and `prompt_embeds` undefined."
)
elif prompt is not None and (not isinstance(prompt, str) and not isinstance(prompt, list)):
raise ValueError(f"`prompt` has to be of type `str` or `list` but is {type(prompt)}")
if prompt is not None and negative_prompt_embeds is not None:
raise ValueError(
f"Cannot forward both `prompt`: {prompt} and `negative_prompt_embeds`:"
f" {negative_prompt_embeds}. Please make sure to only forward one of the two."
)
if negative_prompt is not None and negative_prompt_embeds is not None:
raise ValueError(
f"Cannot forward both `negative_prompt`: {negative_prompt} and `negative_prompt_embeds`:"
f" {negative_prompt_embeds}. Please make sure to only forward one of the two."
)
if prompt_embeds is not None and prompt_attention_mask is None:
raise ValueError("Must provide `prompt_attention_mask` when specifying `prompt_embeds`.")
if negative_prompt_embeds is not None and negative_prompt_attention_mask is None:
raise ValueError("Must provide `negative_prompt_attention_mask` when specifying `negative_prompt_embeds`.")
if prompt_embeds is not None and negative_prompt_embeds is not None:
if prompt_embeds.shape != negative_prompt_embeds.shape:
raise ValueError(
"`prompt_embeds` and `negative_prompt_embeds` must have the same shape when passed directly, but"
f" got: `prompt_embeds` {prompt_embeds.shape} != `negative_prompt_embeds`"
f" {negative_prompt_embeds.shape}."
)
if prompt_attention_mask.shape != negative_prompt_attention_mask.shape:
raise ValueError(
"`prompt_attention_mask` and `negative_prompt_attention_mask` must have the same shape when passed directly, but"
f" got: `prompt_attention_mask` {prompt_attention_mask.shape} != `negative_prompt_attention_mask`"
f" {negative_prompt_attention_mask.shape}."
)
# Copied from diffusers.pipelines.deepfloyd_if.pipeline_if.IFPipeline._text_preprocessing
def _text_preprocessing(self, text, clean_caption=False):
if clean_caption and not is_bs4_available():
logger.warn(BACKENDS_MAPPING["bs4"][-1].format("Setting `clean_caption=True`"))
logger.warn("Setting `clean_caption` to False...")
clean_caption = False
if clean_caption and not is_ftfy_available():
logger.warn(BACKENDS_MAPPING["ftfy"][-1].format("Setting `clean_caption=True`"))
logger.warn("Setting `clean_caption` to False...")
clean_caption = False
if not isinstance(text, (tuple, list)):
text = [text]
def process(text: str):
if clean_caption:
text = self._clean_caption(text)
text = self._clean_caption(text)
else:
text = text.lower().strip()
return text
return [process(t) for t in text]
# Copied from diffusers.pipelines.deepfloyd_if.pipeline_if.IFPipeline._clean_caption
def _clean_caption(self, caption):
caption = str(caption)
caption = ul.unquote_plus(caption)
caption = caption.strip().lower()
caption = re.sub("<person>", "person", caption)
# urls:
caption = re.sub(
r"\b((?:https?:(?:\/{1,3}|[a-zA-Z0-9%])|[a-zA-Z0-9.\-]+[.](?:com|co|ru|net|org|edu|gov|it)[\w/-]*\b\/?(?!@)))", # noqa
"",
caption,
) # regex for urls
caption = re.sub(
r"\b((?:www:(?:\/{1,3}|[a-zA-Z0-9%])|[a-zA-Z0-9.\-]+[.](?:com|co|ru|net|org|edu|gov|it)[\w/-]*\b\/?(?!@)))", # noqa
"",
caption,
) # regex for urls
# html:
caption = BeautifulSoup(caption, features="html.parser").text
# @<nickname>
caption = re.sub(r"@[\w\d]+\b", "", caption)
# 31C0—31EF CJK Strokes
# 31F0—31FF Katakana Phonetic Extensions
# 3200—32FF Enclosed CJK Letters and Months
# 3300—33FF CJK Compatibility
# 3400—4DBF CJK Unified Ideographs Extension A
# 4DC0—4DFF Yijing Hexagram Symbols
# 4E00—9FFF CJK Unified Ideographs
caption = re.sub(r"[\u31c0-\u31ef]+", "", caption)
caption = re.sub(r"[\u31f0-\u31ff]+", "", caption)
caption = re.sub(r"[\u3200-\u32ff]+", "", caption)
caption = re.sub(r"[\u3300-\u33ff]+", "", caption)
caption = re.sub(r"[\u3400-\u4dbf]+", "", caption)
caption = re.sub(r"[\u4dc0-\u4dff]+", "", caption)
caption = re.sub(r"[\u4e00-\u9fff]+", "", caption)
#######################################################
# все виды тире / all types of dash --> "-"
caption = re.sub(
r"[\u002D\u058A\u05BE\u1400\u1806\u2010-\u2015\u2E17\u2E1A\u2E3A\u2E3B\u2E40\u301C\u3030\u30A0\uFE31\uFE32\uFE58\uFE63\uFF0D]+", # noqa
"-",
caption,
)
# кавычки к одному стандарту
caption = re.sub(r"[`´«»“”¨]", '"', caption)
caption = re.sub(r"[‘’]", "'", caption)
# "
caption = re.sub(r""?", "", caption)
# &
caption = re.sub(r"&", "", caption)
# ip adresses:
caption = re.sub(r"\d{1,3}\.\d{1,3}\.\d{1,3}\.\d{1,3}", " ", caption)
# article ids:
caption = re.sub(r"\d:\d\d\s+$", "", caption)
# \n
caption = re.sub(r"\\n", " ", caption)
# "#123"
caption = re.sub(r"#\d{1,3}\b", "", caption)
# "#12345.."
caption = re.sub(r"#\d{5,}\b", "", caption)
# "123456.."
caption = re.sub(r"\b\d{6,}\b", "", caption)
# filenames:
caption = re.sub(r"[\S]+\.(?:png|jpg|jpeg|bmp|webp|eps|pdf|apk|mp4)", "", caption)
#
caption = re.sub(r"[\"\']{2,}", r'"', caption) # """AUSVERKAUFT"""
caption = re.sub(r"[\.]{2,}", r" ", caption) # """AUSVERKAUFT"""
caption = re.sub(self.bad_punct_regex, r" ", caption) # ***AUSVERKAUFT***, #AUSVERKAUFT
caption = re.sub(r"\s+\.\s+", r" ", caption) # " . "
# this-is-my-cute-cat / this_is_my_cute_cat
regex2 = re.compile(r"(?:\-|\_)")
if len(re.findall(regex2, caption)) > 3:
caption = re.sub(regex2, " ", caption)
caption = ftfy.fix_text(caption)
caption = html.unescape(html.unescape(caption))
caption = re.sub(r"\b[a-zA-Z]{1,3}\d{3,15}\b", "", caption) # jc6640
caption = re.sub(r"\b[a-zA-Z]+\d+[a-zA-Z]+\b", "", caption) # jc6640vc
caption = re.sub(r"\b\d+[a-zA-Z]+\d+\b", "", caption) # 6640vc231
caption = re.sub(r"(worldwide\s+)?(free\s+)?shipping", "", caption)
caption = re.sub(r"(free\s)?download(\sfree)?", "", caption)
caption = re.sub(r"\bclick\b\s(?:for|on)\s\w+", "", caption)
caption = re.sub(r"\b(?:png|jpg|jpeg|bmp|webp|eps|pdf|apk|mp4)(\simage[s]?)?", "", caption)
caption = re.sub(r"\bpage\s+\d+\b", "", caption)
caption = re.sub(r"\b\d*[a-zA-Z]+\d+[a-zA-Z]+\d+[a-zA-Z\d]*\b", r" ", caption) # j2d1a2a...
caption = re.sub(r"\b\d+\.?\d*[xх×]\d+\.?\d*\b", "", caption)
caption = re.sub(r"\b\s+\:\s+", r": ", caption)
caption = re.sub(r"(\D[,\./])\b", r"\1 ", caption)
caption = re.sub(r"\s+", " ", caption)
caption.strip()
caption = re.sub(r"^[\"\']([\w\W]+)[\"\']$", r"\1", caption)
caption = re.sub(r"^[\'\_,\-\:;]", r"", caption)
caption = re.sub(r"[\'\_,\-\:\-\+]$", r"", caption)
caption = re.sub(r"^\.\S+$", "", caption)
return caption.strip()
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion.StableDiffusionPipeline.prepare_latents
def prepare_latents(self, batch_size, num_channels_latents, height, width, dtype, device, generator, latents=None):
shape = (batch_size, num_channels_latents, height // self.vae_scale_factor, width // self.vae_scale_factor)
if isinstance(generator, list) and len(generator) != batch_size:
raise ValueError(
f"You have passed a list of generators of length {len(generator)}, but requested an effective batch"
f" size of {batch_size}. Make sure the batch size matches the length of the generators."
)
if latents is None:
latents = randn_tensor(shape, generator=generator, device=device, dtype=dtype)
else:
latents = latents.to(device)
# scale the initial noise by the standard deviation required by the scheduler
latents = latents * self.scheduler.init_noise_sigma
return latents
@staticmethod
def classify_height_width_bin(height: int, width: int, ratios: dict) -> Tuple[int, int]:
"""Returns binned height and width."""
ar = float(height / width)
closest_ratio = min(ratios.keys(), key=lambda ratio: abs(float(ratio) - ar))
default_hw = ratios[closest_ratio]
return int(default_hw[0]), int(default_hw[1])
@staticmethod
def resize_and_crop_tensor(samples: torch.Tensor, new_width: int, new_height: int) -> torch.Tensor:
orig_height, orig_width = samples.shape[2], samples.shape[3]
# Check if resizing is needed
if orig_height != new_height or orig_width != new_width:
ratio = max(new_height / orig_height, new_width / orig_width)
resized_width = int(orig_width * ratio)
resized_height = int(orig_height * ratio)
# Resize
samples = F.interpolate(
samples, size=(resized_height, resized_width), mode="bilinear", align_corners=False
)
# Center Crop
start_x = (resized_width - new_width) // 2
end_x = start_x + new_width
start_y = (resized_height - new_height) // 2
end_y = start_y + new_height
samples = samples[:, :, start_y:end_y, start_x:end_x]
return samples
@torch.no_grad()
@replace_example_docstring(EXAMPLE_DOC_STRING)
def __call__(
self,
prompt: Union[str, List[str]] = None,
negative_prompt: str = "",
num_inference_steps: int = 20,
timesteps: List[int] = None,
guidance_scale: float = 4.5,
num_images_per_prompt: Optional[int] = 1,
height: Optional[int] = None,
width: Optional[int] = None,
eta: float = 0.0,
generator: Optional[Union[torch.Generator, List[torch.Generator]]] = None,
latents: Optional[torch.FloatTensor] = None,
prompt_embeds: Optional[torch.FloatTensor] = None,
prompt_attention_mask: Optional[torch.FloatTensor] = None,
negative_prompt_embeds: Optional[torch.FloatTensor] = None,
negative_prompt_attention_mask: Optional[torch.FloatTensor] = None,
output_type: Optional[str] = "pil",
return_dict: bool = True,
callback: Optional[Callable[[int, int, torch.FloatTensor], None]] = None,
callback_steps: int = 1,
clean_caption: bool = True,
use_resolution_binning: bool = True,
**kwargs,
) -> Union[ImagePipelineOutput, Tuple]:
"""
Function invoked when calling the pipeline for generation.
Args:
prompt (`str` or `List[str]`, *optional*):
The prompt or prompts to guide the image generation. If not defined, one has to pass `prompt_embeds`.
instead.
negative_prompt (`str` or `List[str]`, *optional*):
The prompt or prompts not to guide the image generation. If not defined, one has to pass
`negative_prompt_embeds` instead. Ignored when not using guidance (i.e., ignored if `guidance_scale` is
less than `1`).
num_inference_steps (`int`, *optional*, defaults to 100):
The number of denoising steps. More denoising steps usually lead to a higher quality image at the
expense of slower inference.
timesteps (`List[int]`, *optional*):
Custom timesteps to use for the denoising process. If not defined, equal spaced `num_inference_steps`
timesteps are used. Must be in descending order.
guidance_scale (`float`, *optional*, defaults to 4.5):
Guidance scale as defined in [Classifier-Free Diffusion Guidance](https://arxiv.org/abs/2207.12598).
`guidance_scale` is defined as `w` of equation 2. of [Imagen
Paper](https://arxiv.org/pdf/2205.11487.pdf). Guidance scale is enabled by setting `guidance_scale >
1`. Higher guidance scale encourages to generate images that are closely linked to the text `prompt`,
usually at the expense of lower image quality.
num_images_per_prompt (`int`, *optional*, defaults to 1):
The number of images to generate per prompt.
height (`int`, *optional*, defaults to self.unet.config.sample_size):
The height in pixels of the generated image.
width (`int`, *optional*, defaults to self.unet.config.sample_size):
The width in pixels of the generated image.
eta (`float`, *optional*, defaults to 0.0):
Corresponds to parameter eta (η) in the DDIM paper: https://arxiv.org/abs/2010.02502. Only applies to
[`schedulers.DDIMScheduler`], will be ignored for others.
generator (`torch.Generator` or `List[torch.Generator]`, *optional*):
One or a list of [torch generator(s)](https://pytorch.org/docs/stable/generated/torch.Generator.html)
to make generation deterministic.
latents (`torch.FloatTensor`, *optional*):
Pre-generated noisy latents, sampled from a Gaussian distribution, to be used as inputs for image
generation. Can be used to tweak the same generation with different prompts. If not provided, a latents
tensor will ge generated by sampling using the supplied random `generator`.
prompt_embeds (`torch.FloatTensor`, *optional*):
Pre-generated text embeddings. Can be used to easily tweak text inputs, *e.g.* prompt weighting. If not
provided, text embeddings will be generated from `prompt` input argument.
prompt_attention_mask (`torch.FloatTensor`, *optional*): Pre-generated attention mask for text embeddings.
negative_prompt_embeds (`torch.FloatTensor`, *optional*):
Pre-generated negative text embeddings. For PixArt-Alpha this negative prompt should be "". If not
provided, negative_prompt_embeds will be generated from `negative_prompt` input argument.
negative_prompt_attention_mask (`torch.FloatTensor`, *optional*):
Pre-generated attention mask for negative text embeddings.
output_type (`str`, *optional*, defaults to `"pil"`):
The output format of the generate image. Choose between
[PIL](https://pillow.readthedocs.io/en/stable/): `PIL.Image.Image` or `np.array`.
return_dict (`bool`, *optional*, defaults to `True`):
Whether or not to return a [`~pipelines.stable_diffusion.IFPipelineOutput`] instead of a plain tuple.
callback (`Callable`, *optional*):
A function that will be called every `callback_steps` steps during inference. The function will be
called with the following arguments: `callback(step: int, timestep: int, latents: torch.FloatTensor)`.
callback_steps (`int`, *optional*, defaults to 1):
The frequency at which the `callback` function will be called. If not specified, the callback will be
called at every step.
clean_caption (`bool`, *optional*, defaults to `True`):
Whether or not to clean the caption before creating embeddings. Requires `beautifulsoup4` and `ftfy` to
be installed. If the dependencies are not installed, the embeddings will be created from the raw
prompt.
use_resolution_binning (`bool` defaults to `True`):
If set to `True`, the requested height and width are first mapped to the closest resolutions using
`ASPECT_RATIO_1024_BIN`. After the produced latents are decoded into images, they are resized back to
the requested resolution. Useful for generating non-square images.
Examples:
Returns:
[`~pipelines.ImagePipelineOutput`] or `tuple`:
If `return_dict` is `True`, [`~pipelines.ImagePipelineOutput`] is returned, otherwise a `tuple` is
returned where the first element is a list with the generated images
"""
if "mask_feature" in kwargs:
deprecation_message = "The use of `mask_feature` is deprecated. It is no longer used in any computation and that doesn't affect the end results. It will be removed in a future version."
deprecate("mask_feature", "1.0.0", deprecation_message, standard_warn=False)
# 1. Check inputs. Raise error if not correct
height = height or self.transformer.config.sample_size * self.vae_scale_factor
width = width or self.transformer.config.sample_size * self.vae_scale_factor
if use_resolution_binning:
aspect_ratio_bin = (
ASPECT_RATIO_1024_BIN if self.transformer.config.sample_size == 128 else ASPECT_RATIO_512_BIN
)
orig_height, orig_width = height, width
height, width = self.classify_height_width_bin(height, width, ratios=aspect_ratio_bin)
self.check_inputs(
prompt,
height,
width,
negative_prompt,
callback_steps,
prompt_embeds,
negative_prompt_embeds,
prompt_attention_mask,
negative_prompt_attention_mask,
)
# 2. Default height and width to transformer
if prompt is not None and isinstance(prompt, str):
batch_size = 1
elif prompt is not None and isinstance(prompt, list):
batch_size = len(prompt)
else:
batch_size = prompt_embeds.shape[0]
device = self._execution_device
# here `guidance_scale` is defined analog to the guidance weight `w` of equation (2)
# of the Imagen paper: https://arxiv.org/pdf/2205.11487.pdf . `guidance_scale = 1`
# corresponds to doing no classifier free guidance.
do_classifier_free_guidance = guidance_scale > 1.0
# 3. Encode input prompt
(
prompt_embeds,
prompt_attention_mask,
negative_prompt_embeds,
negative_prompt_attention_mask,
) = self.encode_prompt(
prompt,
do_classifier_free_guidance,
negative_prompt=negative_prompt,
num_images_per_prompt=num_images_per_prompt,
device=device,
prompt_embeds=prompt_embeds,
negative_prompt_embeds=negative_prompt_embeds,
prompt_attention_mask=prompt_attention_mask,
negative_prompt_attention_mask=negative_prompt_attention_mask,
clean_caption=clean_caption,
)
if do_classifier_free_guidance:
prompt_embeds = torch.cat([negative_prompt_embeds, prompt_embeds], dim=0)
prompt_attention_mask = torch.cat([negative_prompt_attention_mask, prompt_attention_mask], dim=0)
# 4. Prepare timesteps
timesteps, num_inference_steps = retrieve_timesteps(self.scheduler, num_inference_steps, device, timesteps)
# 5. Prepare latents.
latent_channels = self.transformer.config.in_channels
latents = self.prepare_latents(
batch_size * num_images_per_prompt,
latent_channels,
height,
width,
prompt_embeds.dtype,
device,
generator,
latents,
)
# 6. Prepare extra step kwargs. TODO: Logic should ideally just be moved out of the pipeline
extra_step_kwargs = self.prepare_extra_step_kwargs(generator, eta)
# 6.1 Prepare micro-conditions.
added_cond_kwargs = {"resolution": None, "aspect_ratio": None}
if self.transformer.config.sample_size == 128:
resolution = torch.tensor([height, width]).repeat(batch_size * num_images_per_prompt, 1)
aspect_ratio = torch.tensor([float(height / width)]).repeat(batch_size * num_images_per_prompt, 1)
resolution = resolution.to(dtype=prompt_embeds.dtype, device=device)
aspect_ratio = aspect_ratio.to(dtype=prompt_embeds.dtype, device=device)
if do_classifier_free_guidance:
resolution = torch.cat([resolution, resolution], dim=0)
aspect_ratio = torch.cat([aspect_ratio, aspect_ratio], dim=0)
added_cond_kwargs = {"resolution": resolution, "aspect_ratio": aspect_ratio}
# 7. Denoising loop
num_warmup_steps = max(len(timesteps) - num_inference_steps * self.scheduler.order, 0)
with self.progress_bar(total=num_inference_steps) as progress_bar:
for i, t in enumerate(timesteps):
latent_model_input = torch.cat([latents] * 2) if do_classifier_free_guidance else latents
latent_model_input = self.scheduler.scale_model_input(latent_model_input, t)
current_timestep = t
if not torch.is_tensor(current_timestep):
# TODO: this requires sync between CPU and GPU. So try to pass timesteps as tensors if you can
# This would be a good case for the `match` statement (Python 3.10+)
is_mps = latent_model_input.device.type == "mps"
if isinstance(current_timestep, float):
dtype = torch.float32 if is_mps else torch.float64
else:
dtype = torch.int32 if is_mps else torch.int64
current_timestep = torch.tensor([current_timestep], dtype=dtype, device=latent_model_input.device)
elif len(current_timestep.shape) == 0:
current_timestep = current_timestep[None].to(latent_model_input.device)
# broadcast to batch dimension in a way that's compatible with ONNX/Core ML
current_timestep = current_timestep.expand(latent_model_input.shape[0])
# predict noise model_output
noise_pred = self.transformer(
latent_model_input,
encoder_hidden_states=prompt_embeds,
encoder_attention_mask=prompt_attention_mask,
timestep=current_timestep,
added_cond_kwargs=added_cond_kwargs,
return_dict=False,
)[0]
# perform guidance
if do_classifier_free_guidance:
noise_pred_uncond, noise_pred_text = noise_pred.chunk(2)
noise_pred = noise_pred_uncond + guidance_scale * (noise_pred_text - noise_pred_uncond)
# learned sigma
if self.transformer.config.out_channels // 2 == latent_channels:
noise_pred = noise_pred.chunk(2, dim=1)[0]
else:
noise_pred = noise_pred
# compute previous image: x_t -> x_t-1
latents = self.scheduler.step(noise_pred, t, latents, **extra_step_kwargs, return_dict=False)[0]
# call the callback, if provided
if i == len(timesteps) - 1 or ((i + 1) > num_warmup_steps and (i + 1) % self.scheduler.order == 0):
progress_bar.update()
if callback is not None and i % callback_steps == 0:
step_idx = i // getattr(self.scheduler, "order", 1)
callback(step_idx, t, latents)
if not output_type == "latent":
image = self.vae.decode(latents / self.vae.config.scaling_factor, return_dict=False)[0]
if use_resolution_binning:
image = self.resize_and_crop_tensor(image, orig_width, orig_height)
else:
image = latents
if not output_type == "latent":
image = self.image_processor.postprocess(image, output_type=output_type)
# Offload all models
self.maybe_free_model_hooks()
if not return_dict:
return (image,)
return ImagePipelineOutput(images=image)
| diffusers/src/diffusers/pipelines/pixart_alpha/pipeline_pixart_alpha.py/0 | {
"file_path": "diffusers/src/diffusers/pipelines/pixart_alpha/pipeline_pixart_alpha.py",
"repo_id": "diffusers",
"token_count": 19803
} | 118 |
# Copyright 2023 The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
from typing import Optional, Tuple
import jax
import jax.numpy as jnp
from flax import linen as nn
from flax.core.frozen_dict import FrozenDict
from transformers import CLIPConfig, FlaxPreTrainedModel
from transformers.models.clip.modeling_flax_clip import FlaxCLIPVisionModule
def jax_cosine_distance(emb_1, emb_2, eps=1e-12):
norm_emb_1 = jnp.divide(emb_1.T, jnp.clip(jnp.linalg.norm(emb_1, axis=1), a_min=eps)).T
norm_emb_2 = jnp.divide(emb_2.T, jnp.clip(jnp.linalg.norm(emb_2, axis=1), a_min=eps)).T
return jnp.matmul(norm_emb_1, norm_emb_2.T)
class FlaxStableDiffusionSafetyCheckerModule(nn.Module):
config: CLIPConfig
dtype: jnp.dtype = jnp.float32
def setup(self):
self.vision_model = FlaxCLIPVisionModule(self.config.vision_config)
self.visual_projection = nn.Dense(self.config.projection_dim, use_bias=False, dtype=self.dtype)
self.concept_embeds = self.param("concept_embeds", jax.nn.initializers.ones, (17, self.config.projection_dim))
self.special_care_embeds = self.param(
"special_care_embeds", jax.nn.initializers.ones, (3, self.config.projection_dim)
)
self.concept_embeds_weights = self.param("concept_embeds_weights", jax.nn.initializers.ones, (17,))
self.special_care_embeds_weights = self.param("special_care_embeds_weights", jax.nn.initializers.ones, (3,))
def __call__(self, clip_input):
pooled_output = self.vision_model(clip_input)[1]
image_embeds = self.visual_projection(pooled_output)
special_cos_dist = jax_cosine_distance(image_embeds, self.special_care_embeds)
cos_dist = jax_cosine_distance(image_embeds, self.concept_embeds)
# increase this value to create a stronger `nfsw` filter
# at the cost of increasing the possibility of filtering benign image inputs
adjustment = 0.0
special_scores = special_cos_dist - self.special_care_embeds_weights[None, :] + adjustment
special_scores = jnp.round(special_scores, 3)
is_special_care = jnp.any(special_scores > 0, axis=1, keepdims=True)
# Use a lower threshold if an image has any special care concept
special_adjustment = is_special_care * 0.01
concept_scores = cos_dist - self.concept_embeds_weights[None, :] + special_adjustment
concept_scores = jnp.round(concept_scores, 3)
has_nsfw_concepts = jnp.any(concept_scores > 0, axis=1)
return has_nsfw_concepts
class FlaxStableDiffusionSafetyChecker(FlaxPreTrainedModel):
config_class = CLIPConfig
main_input_name = "clip_input"
module_class = FlaxStableDiffusionSafetyCheckerModule
def __init__(
self,
config: CLIPConfig,
input_shape: Optional[Tuple] = None,
seed: int = 0,
dtype: jnp.dtype = jnp.float32,
_do_init: bool = True,
**kwargs,
):
if input_shape is None:
input_shape = (1, 224, 224, 3)
module = self.module_class(config=config, dtype=dtype, **kwargs)
super().__init__(config, module, input_shape=input_shape, seed=seed, dtype=dtype, _do_init=_do_init)
def init_weights(self, rng: jax.Array, input_shape: Tuple, params: FrozenDict = None) -> FrozenDict:
# init input tensor
clip_input = jax.random.normal(rng, input_shape)
params_rng, dropout_rng = jax.random.split(rng)
rngs = {"params": params_rng, "dropout": dropout_rng}
random_params = self.module.init(rngs, clip_input)["params"]
return random_params
def __call__(
self,
clip_input,
params: dict = None,
):
clip_input = jnp.transpose(clip_input, (0, 2, 3, 1))
return self.module.apply(
{"params": params or self.params},
jnp.array(clip_input, dtype=jnp.float32),
rngs={},
)
| diffusers/src/diffusers/pipelines/stable_diffusion/safety_checker_flax.py/0 | {
"file_path": "diffusers/src/diffusers/pipelines/stable_diffusion/safety_checker_flax.py",
"repo_id": "diffusers",
"token_count": 1823
} | 119 |
from dataclasses import dataclass
from enum import Enum
from typing import TYPE_CHECKING, List, Optional, Union
import numpy as np
import PIL
from PIL import Image
from ...utils import (
DIFFUSERS_SLOW_IMPORT,
BaseOutput,
OptionalDependencyNotAvailable,
_LazyModule,
get_objects_from_module,
is_torch_available,
is_transformers_available,
)
@dataclass
class SafetyConfig(object):
WEAK = {
"sld_warmup_steps": 15,
"sld_guidance_scale": 20,
"sld_threshold": 0.0,
"sld_momentum_scale": 0.0,
"sld_mom_beta": 0.0,
}
MEDIUM = {
"sld_warmup_steps": 10,
"sld_guidance_scale": 1000,
"sld_threshold": 0.01,
"sld_momentum_scale": 0.3,
"sld_mom_beta": 0.4,
}
STRONG = {
"sld_warmup_steps": 7,
"sld_guidance_scale": 2000,
"sld_threshold": 0.025,
"sld_momentum_scale": 0.5,
"sld_mom_beta": 0.7,
}
MAX = {
"sld_warmup_steps": 0,
"sld_guidance_scale": 5000,
"sld_threshold": 1.0,
"sld_momentum_scale": 0.5,
"sld_mom_beta": 0.7,
}
_dummy_objects = {}
_additional_imports = {}
_import_structure = {}
_additional_imports.update({"SafetyConfig": SafetyConfig})
try:
if not (is_transformers_available() and is_torch_available()):
raise OptionalDependencyNotAvailable()
except OptionalDependencyNotAvailable:
from ...utils import dummy_torch_and_transformers_objects
_dummy_objects.update(get_objects_from_module(dummy_torch_and_transformers_objects))
else:
_import_structure.update(
{
"pipeline_output": ["StableDiffusionSafePipelineOutput"],
"pipeline_stable_diffusion_safe": ["StableDiffusionPipelineSafe"],
"safety_checker": ["StableDiffusionSafetyChecker"],
}
)
if TYPE_CHECKING or DIFFUSERS_SLOW_IMPORT:
try:
if not (is_transformers_available() and is_torch_available()):
raise OptionalDependencyNotAvailable()
except OptionalDependencyNotAvailable:
from ...utils.dummy_torch_and_transformers_objects import *
else:
from .pipeline_output import StableDiffusionSafePipelineOutput
from .pipeline_stable_diffusion_safe import StableDiffusionPipelineSafe
from .safety_checker import SafeStableDiffusionSafetyChecker
else:
import sys
sys.modules[__name__] = _LazyModule(
__name__,
globals()["__file__"],
_import_structure,
module_spec=__spec__,
)
for name, value in _dummy_objects.items():
setattr(sys.modules[__name__], name, value)
for name, value in _additional_imports.items():
setattr(sys.modules[__name__], name, value)
| diffusers/src/diffusers/pipelines/stable_diffusion_safe/__init__.py/0 | {
"file_path": "diffusers/src/diffusers/pipelines/stable_diffusion_safe/__init__.py",
"repo_id": "diffusers",
"token_count": 1237
} | 120 |
from typing import TYPE_CHECKING
from ...utils import (
DIFFUSERS_SLOW_IMPORT,
OptionalDependencyNotAvailable,
_LazyModule,
get_objects_from_module,
is_torch_available,
is_transformers_available,
)
_dummy_objects = {}
_import_structure = {}
try:
if not (is_transformers_available() and is_torch_available()):
raise OptionalDependencyNotAvailable()
except OptionalDependencyNotAvailable:
from ...utils import dummy_torch_and_transformers_objects # noqa F403
_dummy_objects.update(get_objects_from_module(dummy_torch_and_transformers_objects))
else:
_import_structure["pipeline_stable_diffusion_adapter"] = ["StableDiffusionAdapterPipeline"]
_import_structure["pipeline_stable_diffusion_xl_adapter"] = ["StableDiffusionXLAdapterPipeline"]
if TYPE_CHECKING or DIFFUSERS_SLOW_IMPORT:
try:
if not (is_transformers_available() and is_torch_available()):
raise OptionalDependencyNotAvailable()
except OptionalDependencyNotAvailable:
from ...utils.dummy_torch_and_transformers_objects import * # noqa F403
else:
from .pipeline_stable_diffusion_adapter import StableDiffusionAdapterPipeline
from .pipeline_stable_diffusion_xl_adapter import StableDiffusionXLAdapterPipeline
else:
import sys
sys.modules[__name__] = _LazyModule(
__name__,
globals()["__file__"],
_import_structure,
module_spec=__spec__,
)
for name, value in _dummy_objects.items():
setattr(sys.modules[__name__], name, value)
| diffusers/src/diffusers/pipelines/t2i_adapter/__init__.py/0 | {
"file_path": "diffusers/src/diffusers/pipelines/t2i_adapter/__init__.py",
"repo_id": "diffusers",
"token_count": 602
} | 121 |
import inspect
from dataclasses import dataclass
from typing import Callable, List, Optional, Union
import numpy as np
import PIL.Image
import torch
from transformers import (
CLIPImageProcessor,
CLIPTextModel,
CLIPTokenizer,
CLIPVisionModelWithProjection,
GPT2Tokenizer,
)
from ...image_processor import VaeImageProcessor
from ...loaders import LoraLoaderMixin, TextualInversionLoaderMixin
from ...models import AutoencoderKL
from ...models.lora import adjust_lora_scale_text_encoder
from ...schedulers import KarrasDiffusionSchedulers
from ...utils import USE_PEFT_BACKEND, deprecate, logging, scale_lora_layers, unscale_lora_layers
from ...utils.outputs import BaseOutput
from ...utils.torch_utils import randn_tensor
from ..pipeline_utils import DiffusionPipeline
from .modeling_text_decoder import UniDiffuserTextDecoder
from .modeling_uvit import UniDiffuserModel
logger = logging.get_logger(__name__) # pylint: disable=invalid-name
# New BaseOutput child class for joint image-text output
@dataclass
class ImageTextPipelineOutput(BaseOutput):
"""
Output class for joint image-text pipelines.
Args:
images (`List[PIL.Image.Image]` or `np.ndarray`)
List of denoised PIL images of length `batch_size` or NumPy array of shape `(batch_size, height, width,
num_channels)`.
text (`List[str]` or `List[List[str]]`)
List of generated text strings of length `batch_size` or a list of list of strings whose outer list has
length `batch_size`.
"""
images: Optional[Union[List[PIL.Image.Image], np.ndarray]]
text: Optional[Union[List[str], List[List[str]]]]
class UniDiffuserPipeline(DiffusionPipeline):
r"""
Pipeline for a bimodal image-text model which supports unconditional text and image generation, text-conditioned
image generation, image-conditioned text generation, and joint image-text generation.
This model inherits from [`DiffusionPipeline`]. Check the superclass documentation for the generic methods
implemented for all pipelines (downloading, saving, running on a particular device, etc.).
Args:
vae ([`AutoencoderKL`]):
Variational Auto-Encoder (VAE) model to encode and decode images to and from latent representations. This
is part of the UniDiffuser image representation along with the CLIP vision encoding.
text_encoder ([`CLIPTextModel`]):
Frozen text-encoder ([clip-vit-large-patch14](https://huggingface.co/openai/clip-vit-large-patch14)).
image_encoder ([`CLIPVisionModel`]):
A [`~transformers.CLIPVisionModel`] to encode images as part of its image representation along with the VAE
latent representation.
image_processor ([`CLIPImageProcessor`]):
[`~transformers.CLIPImageProcessor`] to preprocess an image before CLIP encoding it with `image_encoder`.
clip_tokenizer ([`CLIPTokenizer`]):
A [`~transformers.CLIPTokenizer`] to tokenize the prompt before encoding it with `text_encoder`.
text_decoder ([`UniDiffuserTextDecoder`]):
Frozen text decoder. This is a GPT-style model which is used to generate text from the UniDiffuser
embedding.
text_tokenizer ([`GPT2Tokenizer`]):
A [`~transformers.GPT2Tokenizer`] to decode text for text generation; used along with the `text_decoder`.
unet ([`UniDiffuserModel`]):
A [U-ViT](https://github.com/baofff/U-ViT) model with UNNet-style skip connections between transformer
layers to denoise the encoded image latents.
scheduler ([`SchedulerMixin`]):
A scheduler to be used in combination with `unet` to denoise the encoded image and/or text latents. The
original UniDiffuser paper uses the [`DPMSolverMultistepScheduler`] scheduler.
"""
# TODO: support for moving submodules for components with enable_model_cpu_offload
model_cpu_offload_seq = "text_encoder->image_encoder->unet->vae->text_decoder"
def __init__(
self,
vae: AutoencoderKL,
text_encoder: CLIPTextModel,
image_encoder: CLIPVisionModelWithProjection,
clip_image_processor: CLIPImageProcessor,
clip_tokenizer: CLIPTokenizer,
text_decoder: UniDiffuserTextDecoder,
text_tokenizer: GPT2Tokenizer,
unet: UniDiffuserModel,
scheduler: KarrasDiffusionSchedulers,
):
super().__init__()
if text_encoder.config.hidden_size != text_decoder.prefix_inner_dim:
raise ValueError(
f"The text encoder hidden size and text decoder prefix inner dim must be the same, but"
f" `text_encoder.config.hidden_size`: {text_encoder.config.hidden_size} and `text_decoder.prefix_inner_dim`: {text_decoder.prefix_inner_dim}"
)
self.register_modules(
vae=vae,
text_encoder=text_encoder,
image_encoder=image_encoder,
clip_image_processor=clip_image_processor,
clip_tokenizer=clip_tokenizer,
text_decoder=text_decoder,
text_tokenizer=text_tokenizer,
unet=unet,
scheduler=scheduler,
)
self.vae_scale_factor = 2 ** (len(self.vae.config.block_out_channels) - 1)
self.image_processor = VaeImageProcessor(vae_scale_factor=self.vae_scale_factor)
self.num_channels_latents = vae.config.latent_channels
self.text_encoder_seq_len = text_encoder.config.max_position_embeddings
self.text_encoder_hidden_size = text_encoder.config.hidden_size
self.image_encoder_projection_dim = image_encoder.config.projection_dim
self.unet_resolution = unet.config.sample_size
self.text_intermediate_dim = self.text_encoder_hidden_size
if self.text_decoder.prefix_hidden_dim is not None:
self.text_intermediate_dim = self.text_decoder.prefix_hidden_dim
self.mode = None
# TODO: handle safety checking?
self.safety_checker = None
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion.StableDiffusionPipeline.enable_vae_slicing
def enable_vae_slicing(self):
r"""
Enable sliced VAE decoding. When this option is enabled, the VAE will split the input tensor in slices to
compute decoding in several steps. This is useful to save some memory and allow larger batch sizes.
"""
self.vae.enable_slicing()
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion.StableDiffusionPipeline.disable_vae_slicing
def disable_vae_slicing(self):
r"""
Disable sliced VAE decoding. If `enable_vae_slicing` was previously enabled, this method will go back to
computing decoding in one step.
"""
self.vae.disable_slicing()
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion.StableDiffusionPipeline.enable_vae_tiling
def enable_vae_tiling(self):
r"""
Enable tiled VAE decoding. When this option is enabled, the VAE will split the input tensor into tiles to
compute decoding and encoding in several steps. This is useful for saving a large amount of memory and to allow
processing larger images.
"""
self.vae.enable_tiling()
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion.StableDiffusionPipeline.disable_vae_tiling
def disable_vae_tiling(self):
r"""
Disable tiled VAE decoding. If `enable_vae_tiling` was previously enabled, this method will go back to
computing decoding in one step.
"""
self.vae.disable_tiling()
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion.StableDiffusionPipeline.prepare_extra_step_kwargs
def prepare_extra_step_kwargs(self, generator, eta):
# prepare extra kwargs for the scheduler step, since not all schedulers have the same signature
# eta (η) is only used with the DDIMScheduler, it will be ignored for other schedulers.
# eta corresponds to η in DDIM paper: https://arxiv.org/abs/2010.02502
# and should be between [0, 1]
accepts_eta = "eta" in set(inspect.signature(self.scheduler.step).parameters.keys())
extra_step_kwargs = {}
if accepts_eta:
extra_step_kwargs["eta"] = eta
# check if the scheduler accepts generator
accepts_generator = "generator" in set(inspect.signature(self.scheduler.step).parameters.keys())
if accepts_generator:
extra_step_kwargs["generator"] = generator
return extra_step_kwargs
def _infer_mode(self, prompt, prompt_embeds, image, latents, prompt_latents, vae_latents, clip_latents):
r"""
Infer the generation task ('mode') from the inputs to `__call__`. If the mode has been manually set, the set
mode will be used.
"""
prompt_available = (prompt is not None) or (prompt_embeds is not None)
image_available = image is not None
input_available = prompt_available or image_available
prompt_latents_available = prompt_latents is not None
vae_latents_available = vae_latents is not None
clip_latents_available = clip_latents is not None
full_latents_available = latents is not None
image_latents_available = vae_latents_available and clip_latents_available
all_indv_latents_available = prompt_latents_available and image_latents_available
if self.mode is not None:
# Preferentially use the mode set by the user
mode = self.mode
elif prompt_available:
mode = "text2img"
elif image_available:
mode = "img2text"
else:
# Neither prompt nor image supplied, infer based on availability of latents
if full_latents_available or all_indv_latents_available:
mode = "joint"
elif prompt_latents_available:
mode = "text"
elif image_latents_available:
mode = "img"
else:
# No inputs or latents available
mode = "joint"
# Give warnings for ambiguous cases
if self.mode is None and prompt_available and image_available:
logger.warning(
f"You have supplied both a text prompt and image to the pipeline and mode has not been set manually,"
f" defaulting to mode '{mode}'."
)
if self.mode is None and not input_available:
if vae_latents_available != clip_latents_available:
# Exactly one of vae_latents and clip_latents is supplied
logger.warning(
f"You have supplied exactly one of `vae_latents` and `clip_latents`, whereas either both or none"
f" are expected to be supplied. Defaulting to mode '{mode}'."
)
elif not prompt_latents_available and not vae_latents_available and not clip_latents_available:
# No inputs or latents supplied
logger.warning(
f"No inputs or latents have been supplied, and mode has not been manually set,"
f" defaulting to mode '{mode}'."
)
return mode
# Functions to manually set the mode
def set_text_mode(self):
r"""Manually set the generation mode to unconditional ("marginal") text generation."""
self.mode = "text"
def set_image_mode(self):
r"""Manually set the generation mode to unconditional ("marginal") image generation."""
self.mode = "img"
def set_text_to_image_mode(self):
r"""Manually set the generation mode to text-conditioned image generation."""
self.mode = "text2img"
def set_image_to_text_mode(self):
r"""Manually set the generation mode to image-conditioned text generation."""
self.mode = "img2text"
def set_joint_mode(self):
r"""Manually set the generation mode to unconditional joint image-text generation."""
self.mode = "joint"
def reset_mode(self):
r"""Removes a manually set mode; after calling this, the pipeline will infer the mode from inputs."""
self.mode = None
def _infer_batch_size(
self,
mode,
prompt,
prompt_embeds,
image,
num_images_per_prompt,
num_prompts_per_image,
latents,
prompt_latents,
vae_latents,
clip_latents,
):
r"""Infers the batch size and multiplier depending on mode and supplied arguments to `__call__`."""
if num_images_per_prompt is None:
num_images_per_prompt = 1
if num_prompts_per_image is None:
num_prompts_per_image = 1
assert num_images_per_prompt > 0, "num_images_per_prompt must be a positive integer"
assert num_prompts_per_image > 0, "num_prompts_per_image must be a positive integer"
if mode in ["text2img"]:
if prompt is not None and isinstance(prompt, str):
batch_size = 1
elif prompt is not None and isinstance(prompt, list):
batch_size = len(prompt)
else:
# Either prompt or prompt_embeds must be present for text2img.
batch_size = prompt_embeds.shape[0]
multiplier = num_images_per_prompt
elif mode in ["img2text"]:
if isinstance(image, PIL.Image.Image):
batch_size = 1
else:
# Image must be available and type either PIL.Image.Image or torch.FloatTensor.
# Not currently supporting something like image_embeds.
batch_size = image.shape[0]
multiplier = num_prompts_per_image
elif mode in ["img"]:
if vae_latents is not None:
batch_size = vae_latents.shape[0]
elif clip_latents is not None:
batch_size = clip_latents.shape[0]
else:
batch_size = 1
multiplier = num_images_per_prompt
elif mode in ["text"]:
if prompt_latents is not None:
batch_size = prompt_latents.shape[0]
else:
batch_size = 1
multiplier = num_prompts_per_image
elif mode in ["joint"]:
if latents is not None:
batch_size = latents.shape[0]
elif prompt_latents is not None:
batch_size = prompt_latents.shape[0]
elif vae_latents is not None:
batch_size = vae_latents.shape[0]
elif clip_latents is not None:
batch_size = clip_latents.shape[0]
else:
batch_size = 1
if num_images_per_prompt == num_prompts_per_image:
multiplier = num_images_per_prompt
else:
multiplier = min(num_images_per_prompt, num_prompts_per_image)
logger.warning(
f"You are using mode `{mode}` and `num_images_per_prompt`: {num_images_per_prompt} and"
f" num_prompts_per_image: {num_prompts_per_image} are not equal. Using batch size equal to"
f" `min(num_images_per_prompt, num_prompts_per_image) = {batch_size}."
)
return batch_size, multiplier
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion.StableDiffusionPipeline._encode_prompt
def _encode_prompt(
self,
prompt,
device,
num_images_per_prompt,
do_classifier_free_guidance,
negative_prompt=None,
prompt_embeds: Optional[torch.FloatTensor] = None,
negative_prompt_embeds: Optional[torch.FloatTensor] = None,
lora_scale: Optional[float] = None,
**kwargs,
):
deprecation_message = "`_encode_prompt()` is deprecated and it will be removed in a future version. Use `encode_prompt()` instead. Also, be aware that the output format changed from a concatenated tensor to a tuple."
deprecate("_encode_prompt()", "1.0.0", deprecation_message, standard_warn=False)
prompt_embeds_tuple = self.encode_prompt(
prompt=prompt,
device=device,
num_images_per_prompt=num_images_per_prompt,
do_classifier_free_guidance=do_classifier_free_guidance,
negative_prompt=negative_prompt,
prompt_embeds=prompt_embeds,
negative_prompt_embeds=negative_prompt_embeds,
lora_scale=lora_scale,
**kwargs,
)
# concatenate for backwards comp
prompt_embeds = torch.cat([prompt_embeds_tuple[1], prompt_embeds_tuple[0]])
return prompt_embeds
# Copied from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion.StableDiffusionPipeline.encode_prompt with self.tokenizer->self.clip_tokenizer
def encode_prompt(
self,
prompt,
device,
num_images_per_prompt,
do_classifier_free_guidance,
negative_prompt=None,
prompt_embeds: Optional[torch.FloatTensor] = None,
negative_prompt_embeds: Optional[torch.FloatTensor] = None,
lora_scale: Optional[float] = None,
clip_skip: Optional[int] = None,
):
r"""
Encodes the prompt into text encoder hidden states.
Args:
prompt (`str` or `List[str]`, *optional*):
prompt to be encoded
device: (`torch.device`):
torch device
num_images_per_prompt (`int`):
number of images that should be generated per prompt
do_classifier_free_guidance (`bool`):
whether to use classifier free guidance or not
negative_prompt (`str` or `List[str]`, *optional*):
The prompt or prompts not to guide the image generation. If not defined, one has to pass
`negative_prompt_embeds` instead. Ignored when not using guidance (i.e., ignored if `guidance_scale` is
less than `1`).
prompt_embeds (`torch.FloatTensor`, *optional*):
Pre-generated text embeddings. Can be used to easily tweak text inputs, *e.g.* prompt weighting. If not
provided, text embeddings will be generated from `prompt` input argument.
negative_prompt_embeds (`torch.FloatTensor`, *optional*):
Pre-generated negative text embeddings. Can be used to easily tweak text inputs, *e.g.* prompt
weighting. If not provided, negative_prompt_embeds will be generated from `negative_prompt` input
argument.
lora_scale (`float`, *optional*):
A LoRA scale that will be applied to all LoRA layers of the text encoder if LoRA layers are loaded.
clip_skip (`int`, *optional*):
Number of layers to be skipped from CLIP while computing the prompt embeddings. A value of 1 means that
the output of the pre-final layer will be used for computing the prompt embeddings.
"""
# set lora scale so that monkey patched LoRA
# function of text encoder can correctly access it
if lora_scale is not None and isinstance(self, LoraLoaderMixin):
self._lora_scale = lora_scale
# dynamically adjust the LoRA scale
if not USE_PEFT_BACKEND:
adjust_lora_scale_text_encoder(self.text_encoder, lora_scale)
else:
scale_lora_layers(self.text_encoder, lora_scale)
if prompt is not None and isinstance(prompt, str):
batch_size = 1
elif prompt is not None and isinstance(prompt, list):
batch_size = len(prompt)
else:
batch_size = prompt_embeds.shape[0]
if prompt_embeds is None:
# textual inversion: procecss multi-vector tokens if necessary
if isinstance(self, TextualInversionLoaderMixin):
prompt = self.maybe_convert_prompt(prompt, self.clip_tokenizer)
text_inputs = self.clip_tokenizer(
prompt,
padding="max_length",
max_length=self.clip_tokenizer.model_max_length,
truncation=True,
return_tensors="pt",
)
text_input_ids = text_inputs.input_ids
untruncated_ids = self.clip_tokenizer(prompt, padding="longest", return_tensors="pt").input_ids
if untruncated_ids.shape[-1] >= text_input_ids.shape[-1] and not torch.equal(
text_input_ids, untruncated_ids
):
removed_text = self.clip_tokenizer.batch_decode(
untruncated_ids[:, self.clip_tokenizer.model_max_length - 1 : -1]
)
logger.warning(
"The following part of your input was truncated because CLIP can only handle sequences up to"
f" {self.clip_tokenizer.model_max_length} tokens: {removed_text}"
)
if hasattr(self.text_encoder.config, "use_attention_mask") and self.text_encoder.config.use_attention_mask:
attention_mask = text_inputs.attention_mask.to(device)
else:
attention_mask = None
if clip_skip is None:
prompt_embeds = self.text_encoder(text_input_ids.to(device), attention_mask=attention_mask)
prompt_embeds = prompt_embeds[0]
else:
prompt_embeds = self.text_encoder(
text_input_ids.to(device), attention_mask=attention_mask, output_hidden_states=True
)
# Access the `hidden_states` first, that contains a tuple of
# all the hidden states from the encoder layers. Then index into
# the tuple to access the hidden states from the desired layer.
prompt_embeds = prompt_embeds[-1][-(clip_skip + 1)]
# We also need to apply the final LayerNorm here to not mess with the
# representations. The `last_hidden_states` that we typically use for
# obtaining the final prompt representations passes through the LayerNorm
# layer.
prompt_embeds = self.text_encoder.text_model.final_layer_norm(prompt_embeds)
if self.text_encoder is not None:
prompt_embeds_dtype = self.text_encoder.dtype
elif self.unet is not None:
prompt_embeds_dtype = self.unet.dtype
else:
prompt_embeds_dtype = prompt_embeds.dtype
prompt_embeds = prompt_embeds.to(dtype=prompt_embeds_dtype, device=device)
bs_embed, seq_len, _ = prompt_embeds.shape
# duplicate text embeddings for each generation per prompt, using mps friendly method
prompt_embeds = prompt_embeds.repeat(1, num_images_per_prompt, 1)
prompt_embeds = prompt_embeds.view(bs_embed * num_images_per_prompt, seq_len, -1)
# get unconditional embeddings for classifier free guidance
if do_classifier_free_guidance and negative_prompt_embeds is None:
uncond_tokens: List[str]
if negative_prompt is None:
uncond_tokens = [""] * batch_size
elif prompt is not None and type(prompt) is not type(negative_prompt):
raise TypeError(
f"`negative_prompt` should be the same type to `prompt`, but got {type(negative_prompt)} !="
f" {type(prompt)}."
)
elif isinstance(negative_prompt, str):
uncond_tokens = [negative_prompt]
elif batch_size != len(negative_prompt):
raise ValueError(
f"`negative_prompt`: {negative_prompt} has batch size {len(negative_prompt)}, but `prompt`:"
f" {prompt} has batch size {batch_size}. Please make sure that passed `negative_prompt` matches"
" the batch size of `prompt`."
)
else:
uncond_tokens = negative_prompt
# textual inversion: procecss multi-vector tokens if necessary
if isinstance(self, TextualInversionLoaderMixin):
uncond_tokens = self.maybe_convert_prompt(uncond_tokens, self.clip_tokenizer)
max_length = prompt_embeds.shape[1]
uncond_input = self.clip_tokenizer(
uncond_tokens,
padding="max_length",
max_length=max_length,
truncation=True,
return_tensors="pt",
)
if hasattr(self.text_encoder.config, "use_attention_mask") and self.text_encoder.config.use_attention_mask:
attention_mask = uncond_input.attention_mask.to(device)
else:
attention_mask = None
negative_prompt_embeds = self.text_encoder(
uncond_input.input_ids.to(device),
attention_mask=attention_mask,
)
negative_prompt_embeds = negative_prompt_embeds[0]
if do_classifier_free_guidance:
# duplicate unconditional embeddings for each generation per prompt, using mps friendly method
seq_len = negative_prompt_embeds.shape[1]
negative_prompt_embeds = negative_prompt_embeds.to(dtype=prompt_embeds_dtype, device=device)
negative_prompt_embeds = negative_prompt_embeds.repeat(1, num_images_per_prompt, 1)
negative_prompt_embeds = negative_prompt_embeds.view(batch_size * num_images_per_prompt, seq_len, -1)
if isinstance(self, LoraLoaderMixin) and USE_PEFT_BACKEND:
# Retrieve the original scale by scaling back the LoRA layers
unscale_lora_layers(self.text_encoder, lora_scale)
return prompt_embeds, negative_prompt_embeds
# Modified from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion_instruct_pix2pix.StableDiffusionInstructPix2PixPipeline.prepare_image_latents
# Add num_prompts_per_image argument, sample from autoencoder moment distribution
def encode_image_vae_latents(
self,
image,
batch_size,
num_prompts_per_image,
dtype,
device,
do_classifier_free_guidance,
generator=None,
):
if not isinstance(image, (torch.Tensor, PIL.Image.Image, list)):
raise ValueError(
f"`image` has to be of type `torch.Tensor`, `PIL.Image.Image` or list but is {type(image)}"
)
image = image.to(device=device, dtype=dtype)
batch_size = batch_size * num_prompts_per_image
if isinstance(generator, list) and len(generator) != batch_size:
raise ValueError(
f"You have passed a list of generators of length {len(generator)}, but requested an effective batch"
f" size of {batch_size}. Make sure the batch size matches the length of the generators."
)
if isinstance(generator, list):
image_latents = [
self.vae.encode(image[i : i + 1]).latent_dist.sample(generator=generator[i])
* self.vae.config.scaling_factor
for i in range(batch_size)
]
image_latents = torch.cat(image_latents, dim=0)
else:
image_latents = self.vae.encode(image).latent_dist.sample(generator=generator)
# Scale image_latents by the VAE's scaling factor
image_latents = image_latents * self.vae.config.scaling_factor
if batch_size > image_latents.shape[0] and batch_size % image_latents.shape[0] == 0:
# expand image_latents for batch_size
deprecation_message = (
f"You have passed {batch_size} text prompts (`prompt`), but only {image_latents.shape[0]} initial"
" images (`image`). Initial images are now duplicating to match the number of text prompts. Note"
" that this behavior is deprecated and will be removed in a version 1.0.0. Please make sure to update"
" your script to pass as many initial images as text prompts to suppress this warning."
)
deprecate("len(prompt) != len(image)", "1.0.0", deprecation_message, standard_warn=False)
additional_image_per_prompt = batch_size // image_latents.shape[0]
image_latents = torch.cat([image_latents] * additional_image_per_prompt, dim=0)
elif batch_size > image_latents.shape[0] and batch_size % image_latents.shape[0] != 0:
raise ValueError(
f"Cannot duplicate `image` of batch size {image_latents.shape[0]} to {batch_size} text prompts."
)
else:
image_latents = torch.cat([image_latents], dim=0)
if do_classifier_free_guidance:
uncond_image_latents = torch.zeros_like(image_latents)
image_latents = torch.cat([image_latents, image_latents, uncond_image_latents], dim=0)
return image_latents
def encode_image_clip_latents(
self,
image,
batch_size,
num_prompts_per_image,
dtype,
device,
generator=None,
):
# Map image to CLIP embedding.
if not isinstance(image, (torch.Tensor, PIL.Image.Image, list)):
raise ValueError(
f"`image` has to be of type `torch.Tensor`, `PIL.Image.Image` or list but is {type(image)}"
)
preprocessed_image = self.clip_image_processor.preprocess(
image,
return_tensors="pt",
)
preprocessed_image = preprocessed_image.to(device=device, dtype=dtype)
batch_size = batch_size * num_prompts_per_image
if isinstance(generator, list):
image_latents = [
self.image_encoder(**preprocessed_image[i : i + 1]).image_embeds for i in range(batch_size)
]
image_latents = torch.cat(image_latents, dim=0)
else:
image_latents = self.image_encoder(**preprocessed_image).image_embeds
if batch_size > image_latents.shape[0] and batch_size % image_latents.shape[0] == 0:
# expand image_latents for batch_size
deprecation_message = (
f"You have passed {batch_size} text prompts (`prompt`), but only {image_latents.shape[0]} initial"
" images (`image`). Initial images are now duplicating to match the number of text prompts. Note"
" that this behavior is deprecated and will be removed in a version 1.0.0. Please make sure to update"
" your script to pass as many initial images as text prompts to suppress this warning."
)
deprecate("len(prompt) != len(image)", "1.0.0", deprecation_message, standard_warn=False)
additional_image_per_prompt = batch_size // image_latents.shape[0]
image_latents = torch.cat([image_latents] * additional_image_per_prompt, dim=0)
elif batch_size > image_latents.shape[0] and batch_size % image_latents.shape[0] != 0:
raise ValueError(
f"Cannot duplicate `image` of batch size {image_latents.shape[0]} to {batch_size} text prompts."
)
else:
image_latents = torch.cat([image_latents], dim=0)
if isinstance(generator, list) and len(generator) != batch_size:
raise ValueError(
f"You have passed a list of generators of length {len(generator)}, but requested an effective batch"
f" size of {batch_size}. Make sure the batch size matches the length of the generators."
)
return image_latents
def prepare_text_latents(
self, batch_size, num_images_per_prompt, seq_len, hidden_size, dtype, device, generator, latents=None
):
# Prepare latents for the CLIP embedded prompt.
shape = (batch_size * num_images_per_prompt, seq_len, hidden_size)
if isinstance(generator, list) and len(generator) != batch_size:
raise ValueError(
f"You have passed a list of generators of length {len(generator)}, but requested an effective batch"
f" size of {batch_size}. Make sure the batch size matches the length of the generators."
)
if latents is None:
latents = randn_tensor(shape, generator=generator, device=device, dtype=dtype)
else:
# latents is assumed to have shace (B, L, D)
latents = latents.repeat(num_images_per_prompt, 1, 1)
latents = latents.to(device=device, dtype=dtype)
# scale the initial noise by the standard deviation required by the scheduler
latents = latents * self.scheduler.init_noise_sigma
return latents
# Modified from diffusers.pipelines.stable_diffusion.pipeline_stable_diffusion.StableDiffusionPipeline.prepare_latents
# Rename prepare_latents -> prepare_image_vae_latents and add num_prompts_per_image argument.
def prepare_image_vae_latents(
self,
batch_size,
num_prompts_per_image,
num_channels_latents,
height,
width,
dtype,
device,
generator,
latents=None,
):
shape = (
batch_size * num_prompts_per_image,
num_channels_latents,
height // self.vae_scale_factor,
width // self.vae_scale_factor,
)
if isinstance(generator, list) and len(generator) != batch_size:
raise ValueError(
f"You have passed a list of generators of length {len(generator)}, but requested an effective batch"
f" size of {batch_size}. Make sure the batch size matches the length of the generators."
)
if latents is None:
latents = randn_tensor(shape, generator=generator, device=device, dtype=dtype)
else:
# latents is assumed to have shape (B, C, H, W)
latents = latents.repeat(num_prompts_per_image, 1, 1, 1)
latents = latents.to(device=device, dtype=dtype)
# scale the initial noise by the standard deviation required by the scheduler
latents = latents * self.scheduler.init_noise_sigma
return latents
def prepare_image_clip_latents(
self, batch_size, num_prompts_per_image, clip_img_dim, dtype, device, generator, latents=None
):
# Prepare latents for the CLIP embedded image.
shape = (batch_size * num_prompts_per_image, 1, clip_img_dim)
if isinstance(generator, list) and len(generator) != batch_size:
raise ValueError(
f"You have passed a list of generators of length {len(generator)}, but requested an effective batch"
f" size of {batch_size}. Make sure the batch size matches the length of the generators."
)
if latents is None:
latents = randn_tensor(shape, generator=generator, device=device, dtype=dtype)
else:
# latents is assumed to have shape (B, L, D)
latents = latents.repeat(num_prompts_per_image, 1, 1)
latents = latents.to(device=device, dtype=dtype)
# scale the initial noise by the standard deviation required by the scheduler
latents = latents * self.scheduler.init_noise_sigma
return latents
def decode_text_latents(self, text_latents, device):
output_token_list, seq_lengths = self.text_decoder.generate_captions(
text_latents, self.text_tokenizer.eos_token_id, device=device
)
output_list = output_token_list.cpu().numpy()
generated_text = [
self.text_tokenizer.decode(output[: int(length)], skip_special_tokens=True)
for output, length in zip(output_list, seq_lengths)
]
return generated_text
def _split(self, x, height, width):
r"""
Splits a flattened embedding x of shape (B, C * H * W + clip_img_dim) into two tensors of shape (B, C, H, W)
and (B, 1, clip_img_dim)
"""
batch_size = x.shape[0]
latent_height = height // self.vae_scale_factor
latent_width = width // self.vae_scale_factor
img_vae_dim = self.num_channels_latents * latent_height * latent_width
img_vae, img_clip = x.split([img_vae_dim, self.image_encoder_projection_dim], dim=1)
img_vae = torch.reshape(img_vae, (batch_size, self.num_channels_latents, latent_height, latent_width))
img_clip = torch.reshape(img_clip, (batch_size, 1, self.image_encoder_projection_dim))
return img_vae, img_clip
def _combine(self, img_vae, img_clip):
r"""
Combines a latent iamge img_vae of shape (B, C, H, W) and a CLIP-embedded image img_clip of shape (B, 1,
clip_img_dim) into a single tensor of shape (B, C * H * W + clip_img_dim).
"""
img_vae = torch.reshape(img_vae, (img_vae.shape[0], -1))
img_clip = torch.reshape(img_clip, (img_clip.shape[0], -1))
return torch.concat([img_vae, img_clip], dim=-1)
def _split_joint(self, x, height, width):
r"""
Splits a flattened embedding x of shape (B, C * H * W + clip_img_dim + text_seq_len * text_dim] into (img_vae,
img_clip, text) where img_vae is of shape (B, C, H, W), img_clip is of shape (B, 1, clip_img_dim), and text is
of shape (B, text_seq_len, text_dim).
"""
batch_size = x.shape[0]
latent_height = height // self.vae_scale_factor
latent_width = width // self.vae_scale_factor
img_vae_dim = self.num_channels_latents * latent_height * latent_width
text_dim = self.text_encoder_seq_len * self.text_intermediate_dim
img_vae, img_clip, text = x.split([img_vae_dim, self.image_encoder_projection_dim, text_dim], dim=1)
img_vae = torch.reshape(img_vae, (batch_size, self.num_channels_latents, latent_height, latent_width))
img_clip = torch.reshape(img_clip, (batch_size, 1, self.image_encoder_projection_dim))
text = torch.reshape(text, (batch_size, self.text_encoder_seq_len, self.text_intermediate_dim))
return img_vae, img_clip, text
def _combine_joint(self, img_vae, img_clip, text):
r"""
Combines a latent image img_vae of shape (B, C, H, W), a CLIP-embedded image img_clip of shape (B, L_img,
clip_img_dim), and a text embedding text of shape (B, L_text, text_dim) into a single embedding x of shape (B,
C * H * W + L_img * clip_img_dim + L_text * text_dim).
"""
img_vae = torch.reshape(img_vae, (img_vae.shape[0], -1))
img_clip = torch.reshape(img_clip, (img_clip.shape[0], -1))
text = torch.reshape(text, (text.shape[0], -1))
return torch.concat([img_vae, img_clip, text], dim=-1)
def _get_noise_pred(
self,
mode,
latents,
t,
prompt_embeds,
img_vae,
img_clip,
max_timestep,
data_type,
guidance_scale,
generator,
device,
height,
width,
):
r"""
Gets the noise prediction using the `unet` and performs classifier-free guidance, if necessary.
"""
if mode == "joint":
# Joint text-image generation
img_vae_latents, img_clip_latents, text_latents = self._split_joint(latents, height, width)
img_vae_out, img_clip_out, text_out = self.unet(
img_vae_latents, img_clip_latents, text_latents, timestep_img=t, timestep_text=t, data_type=data_type
)
x_out = self._combine_joint(img_vae_out, img_clip_out, text_out)
if guidance_scale <= 1.0:
return x_out
# Classifier-free guidance
img_vae_T = randn_tensor(img_vae.shape, generator=generator, device=device, dtype=img_vae.dtype)
img_clip_T = randn_tensor(img_clip.shape, generator=generator, device=device, dtype=img_clip.dtype)
text_T = randn_tensor(prompt_embeds.shape, generator=generator, device=device, dtype=prompt_embeds.dtype)
_, _, text_out_uncond = self.unet(
img_vae_T, img_clip_T, text_latents, timestep_img=max_timestep, timestep_text=t, data_type=data_type
)
img_vae_out_uncond, img_clip_out_uncond, _ = self.unet(
img_vae_latents,
img_clip_latents,
text_T,
timestep_img=t,
timestep_text=max_timestep,
data_type=data_type,
)
x_out_uncond = self._combine_joint(img_vae_out_uncond, img_clip_out_uncond, text_out_uncond)
return guidance_scale * x_out + (1.0 - guidance_scale) * x_out_uncond
elif mode == "text2img":
# Text-conditioned image generation
img_vae_latents, img_clip_latents = self._split(latents, height, width)
img_vae_out, img_clip_out, text_out = self.unet(
img_vae_latents, img_clip_latents, prompt_embeds, timestep_img=t, timestep_text=0, data_type=data_type
)
img_out = self._combine(img_vae_out, img_clip_out)
if guidance_scale <= 1.0:
return img_out
# Classifier-free guidance
text_T = randn_tensor(prompt_embeds.shape, generator=generator, device=device, dtype=prompt_embeds.dtype)
img_vae_out_uncond, img_clip_out_uncond, text_out_uncond = self.unet(
img_vae_latents,
img_clip_latents,
text_T,
timestep_img=t,
timestep_text=max_timestep,
data_type=data_type,
)
img_out_uncond = self._combine(img_vae_out_uncond, img_clip_out_uncond)
return guidance_scale * img_out + (1.0 - guidance_scale) * img_out_uncond
elif mode == "img2text":
# Image-conditioned text generation
img_vae_out, img_clip_out, text_out = self.unet(
img_vae, img_clip, latents, timestep_img=0, timestep_text=t, data_type=data_type
)
if guidance_scale <= 1.0:
return text_out
# Classifier-free guidance
img_vae_T = randn_tensor(img_vae.shape, generator=generator, device=device, dtype=img_vae.dtype)
img_clip_T = randn_tensor(img_clip.shape, generator=generator, device=device, dtype=img_clip.dtype)
img_vae_out_uncond, img_clip_out_uncond, text_out_uncond = self.unet(
img_vae_T, img_clip_T, latents, timestep_img=max_timestep, timestep_text=t, data_type=data_type
)
return guidance_scale * text_out + (1.0 - guidance_scale) * text_out_uncond
elif mode == "text":
# Unconditional ("marginal") text generation (no CFG)
img_vae_out, img_clip_out, text_out = self.unet(
img_vae, img_clip, latents, timestep_img=max_timestep, timestep_text=t, data_type=data_type
)
return text_out
elif mode == "img":
# Unconditional ("marginal") image generation (no CFG)
img_vae_latents, img_clip_latents = self._split(latents, height, width)
img_vae_out, img_clip_out, text_out = self.unet(
img_vae_latents,
img_clip_latents,
prompt_embeds,
timestep_img=t,
timestep_text=max_timestep,
data_type=data_type,
)
img_out = self._combine(img_vae_out, img_clip_out)
return img_out
def check_latents_shape(self, latents_name, latents, expected_shape):
latents_shape = latents.shape
expected_num_dims = len(expected_shape) + 1 # expected dimensions plus the batch dimension
expected_shape_str = ", ".join(str(dim) for dim in expected_shape)
if len(latents_shape) != expected_num_dims:
raise ValueError(
f"`{latents_name}` should have shape (batch_size, {expected_shape_str}), but the current shape"
f" {latents_shape} has {len(latents_shape)} dimensions."
)
for i in range(1, expected_num_dims):
if latents_shape[i] != expected_shape[i - 1]:
raise ValueError(
f"`{latents_name}` should have shape (batch_size, {expected_shape_str}), but the current shape"
f" {latents_shape} has {latents_shape[i]} != {expected_shape[i - 1]} at dimension {i}."
)
def check_inputs(
self,
mode,
prompt,
image,
height,
width,
callback_steps,
negative_prompt=None,
prompt_embeds=None,
negative_prompt_embeds=None,
latents=None,
prompt_latents=None,
vae_latents=None,
clip_latents=None,
):
# Check inputs before running the generative process.
if height % self.vae_scale_factor != 0 or width % self.vae_scale_factor != 0:
raise ValueError(
f"`height` and `width` have to be divisible by {self.vae_scale_factor} but are {height} and {width}."
)
if (callback_steps is None) or (
callback_steps is not None and (not isinstance(callback_steps, int) or callback_steps <= 0)
):
raise ValueError(
f"`callback_steps` has to be a positive integer but is {callback_steps} of type"
f" {type(callback_steps)}."
)
if mode == "text2img":
if prompt is not None and prompt_embeds is not None:
raise ValueError(
f"Cannot forward both `prompt`: {prompt} and `prompt_embeds`: {prompt_embeds}. Please make sure to"
" only forward one of the two."
)
elif prompt is None and prompt_embeds is None:
raise ValueError(
"Provide either `prompt` or `prompt_embeds`. Cannot leave both `prompt` and `prompt_embeds` undefined."
)
elif prompt is not None and (not isinstance(prompt, str) and not isinstance(prompt, list)):
raise ValueError(f"`prompt` has to be of type `str` or `list` but is {type(prompt)}")
if negative_prompt is not None and negative_prompt_embeds is not None:
raise ValueError(
f"Cannot forward both `negative_prompt`: {negative_prompt} and `negative_prompt_embeds`:"
f" {negative_prompt_embeds}. Please make sure to only forward one of the two."
)
if prompt_embeds is not None and negative_prompt_embeds is not None:
if prompt_embeds.shape != negative_prompt_embeds.shape:
raise ValueError(
"`prompt_embeds` and `negative_prompt_embeds` must have the same shape when passed directly, but"
f" got: `prompt_embeds` {prompt_embeds.shape} != `negative_prompt_embeds`"
f" {negative_prompt_embeds.shape}."
)
if mode == "img2text":
if image is None:
raise ValueError("`img2text` mode requires an image to be provided.")
# Check provided latents
latent_height = height // self.vae_scale_factor
latent_width = width // self.vae_scale_factor
full_latents_available = latents is not None
prompt_latents_available = prompt_latents is not None
vae_latents_available = vae_latents is not None
clip_latents_available = clip_latents is not None
if full_latents_available:
individual_latents_available = (
prompt_latents is not None or vae_latents is not None or clip_latents is not None
)
if individual_latents_available:
logger.warning(
"You have supplied both `latents` and at least one of `prompt_latents`, `vae_latents`, and"
" `clip_latents`. The value of `latents` will override the value of any individually supplied latents."
)
# Check shape of full latents
img_vae_dim = self.num_channels_latents * latent_height * latent_width
text_dim = self.text_encoder_seq_len * self.text_encoder_hidden_size
latents_dim = img_vae_dim + self.image_encoder_projection_dim + text_dim
latents_expected_shape = (latents_dim,)
self.check_latents_shape("latents", latents, latents_expected_shape)
# Check individual latent shapes, if present
if prompt_latents_available:
prompt_latents_expected_shape = (self.text_encoder_seq_len, self.text_encoder_hidden_size)
self.check_latents_shape("prompt_latents", prompt_latents, prompt_latents_expected_shape)
if vae_latents_available:
vae_latents_expected_shape = (self.num_channels_latents, latent_height, latent_width)
self.check_latents_shape("vae_latents", vae_latents, vae_latents_expected_shape)
if clip_latents_available:
clip_latents_expected_shape = (1, self.image_encoder_projection_dim)
self.check_latents_shape("clip_latents", clip_latents, clip_latents_expected_shape)
if mode in ["text2img", "img"] and vae_latents_available and clip_latents_available:
if vae_latents.shape[0] != clip_latents.shape[0]:
raise ValueError(
f"Both `vae_latents` and `clip_latents` are supplied, but their batch dimensions are not equal:"
f" {vae_latents.shape[0]} != {clip_latents.shape[0]}."
)
if mode == "joint" and prompt_latents_available and vae_latents_available and clip_latents_available:
if prompt_latents.shape[0] != vae_latents.shape[0] or prompt_latents.shape[0] != clip_latents.shape[0]:
raise ValueError(
f"All of `prompt_latents`, `vae_latents`, and `clip_latents` are supplied, but their batch"
f" dimensions are not equal: {prompt_latents.shape[0]} != {vae_latents.shape[0]}"
f" != {clip_latents.shape[0]}."
)
@torch.no_grad()
def __call__(
self,
prompt: Optional[Union[str, List[str]]] = None,
image: Optional[Union[torch.FloatTensor, PIL.Image.Image]] = None,
height: Optional[int] = None,
width: Optional[int] = None,
data_type: Optional[int] = 1,
num_inference_steps: int = 50,
guidance_scale: float = 8.0,
negative_prompt: Optional[Union[str, List[str]]] = None,
num_images_per_prompt: Optional[int] = 1,
num_prompts_per_image: Optional[int] = 1,
eta: float = 0.0,
generator: Optional[Union[torch.Generator, List[torch.Generator]]] = None,
latents: Optional[torch.FloatTensor] = None,
prompt_latents: Optional[torch.FloatTensor] = None,
vae_latents: Optional[torch.FloatTensor] = None,
clip_latents: Optional[torch.FloatTensor] = None,
prompt_embeds: Optional[torch.FloatTensor] = None,
negative_prompt_embeds: Optional[torch.FloatTensor] = None,
output_type: Optional[str] = "pil",
return_dict: bool = True,
callback: Optional[Callable[[int, int, torch.FloatTensor], None]] = None,
callback_steps: int = 1,
):
r"""
The call function to the pipeline for generation.
Args:
prompt (`str` or `List[str]`, *optional*):
The prompt or prompts to guide image generation. If not defined, you need to pass `prompt_embeds`.
Required for text-conditioned image generation (`text2img`) mode.
image (`torch.FloatTensor` or `PIL.Image.Image`, *optional*):
`Image` or tensor representing an image batch. Required for image-conditioned text generation
(`img2text`) mode.
height (`int`, *optional*, defaults to `self.unet.config.sample_size * self.vae_scale_factor`):
The height in pixels of the generated image.
width (`int`, *optional*, defaults to `self.unet.config.sample_size * self.vae_scale_factor`):
The width in pixels of the generated image.
data_type (`int`, *optional*, defaults to 1):
The data type (either 0 or 1). Only used if you are loading a checkpoint which supports a data type
embedding; this is added for compatibility with the
[UniDiffuser-v1](https://huggingface.co/thu-ml/unidiffuser-v1) checkpoint.
num_inference_steps (`int`, *optional*, defaults to 50):
The number of denoising steps. More denoising steps usually lead to a higher quality image at the
expense of slower inference.
guidance_scale (`float`, *optional*, defaults to 8.0):
A higher guidance scale value encourages the model to generate images closely linked to the text
`prompt` at the expense of lower image quality. Guidance scale is enabled when `guidance_scale > 1`.
negative_prompt (`str` or `List[str]`, *optional*):
The prompt or prompts to guide what to not include in image generation. If not defined, you need to
pass `negative_prompt_embeds` instead. Ignored when not using guidance (`guidance_scale < 1`). Used in
text-conditioned image generation (`text2img`) mode.
num_images_per_prompt (`int`, *optional*, defaults to 1):
The number of images to generate per prompt. Used in `text2img` (text-conditioned image generation) and
`img` mode. If the mode is joint and both `num_images_per_prompt` and `num_prompts_per_image` are
supplied, `min(num_images_per_prompt, num_prompts_per_image)` samples are generated.
num_prompts_per_image (`int`, *optional*, defaults to 1):
The number of prompts to generate per image. Used in `img2text` (image-conditioned text generation) and
`text` mode. If the mode is joint and both `num_images_per_prompt` and `num_prompts_per_image` are
supplied, `min(num_images_per_prompt, num_prompts_per_image)` samples are generated.
eta (`float`, *optional*, defaults to 0.0):
Corresponds to parameter eta (η) from the [DDIM](https://arxiv.org/abs/2010.02502) paper. Only applies
to the [`~schedulers.DDIMScheduler`], and is ignored in other schedulers.
generator (`torch.Generator` or `List[torch.Generator]`, *optional*):
A [`torch.Generator`](https://pytorch.org/docs/stable/generated/torch.Generator.html) to make
generation deterministic.
latents (`torch.FloatTensor`, *optional*):
Pre-generated noisy latents sampled from a Gaussian distribution, to be used as inputs for joint
image-text generation. Can be used to tweak the same generation with different prompts. If not
provided, a latents tensor is generated by sampling using the supplied random `generator`. This assumes
a full set of VAE, CLIP, and text latents, if supplied, overrides the value of `prompt_latents`,
`vae_latents`, and `clip_latents`.
prompt_latents (`torch.FloatTensor`, *optional*):
Pre-generated noisy latents sampled from a Gaussian distribution, to be used as inputs for text
generation. Can be used to tweak the same generation with different prompts. If not provided, a latents
tensor is generated by sampling using the supplied random `generator`.
vae_latents (`torch.FloatTensor`, *optional*):
Pre-generated noisy latents sampled from a Gaussian distribution, to be used as inputs for image
generation. Can be used to tweak the same generation with different prompts. If not provided, a latents
tensor is generated by sampling using the supplied random `generator`.
clip_latents (`torch.FloatTensor`, *optional*):
Pre-generated noisy latents sampled from a Gaussian distribution, to be used as inputs for image
generation. Can be used to tweak the same generation with different prompts. If not provided, a latents
tensor is generated by sampling using the supplied random `generator`.
prompt_embeds (`torch.FloatTensor`, *optional*):
Pre-generated text embeddings. Can be used to easily tweak text inputs (prompt weighting). If not
provided, text embeddings are generated from the `prompt` input argument. Used in text-conditioned
image generation (`text2img`) mode.
negative_prompt_embeds (`torch.FloatTensor`, *optional*):
Pre-generated negative text embeddings. Can be used to easily tweak text inputs (prompt weighting). If
not provided, `negative_prompt_embeds` are be generated from the `negative_prompt` input argument. Used
in text-conditioned image generation (`text2img`) mode.
output_type (`str`, *optional*, defaults to `"pil"`):
The output format of the generated image. Choose between `PIL.Image` or `np.array`.
return_dict (`bool`, *optional*, defaults to `True`):
Whether or not to return a [`~pipelines.ImageTextPipelineOutput`] instead of a plain tuple.
callback (`Callable`, *optional*):
A function that calls every `callback_steps` steps during inference. The function is called with the
following arguments: `callback(step: int, timestep: int, latents: torch.FloatTensor)`.
callback_steps (`int`, *optional*, defaults to 1):
The frequency at which the `callback` function is called. If not specified, the callback is called at
every step.
Returns:
[`~pipelines.unidiffuser.ImageTextPipelineOutput`] or `tuple`:
If `return_dict` is `True`, [`~pipelines.unidiffuser.ImageTextPipelineOutput`] is returned, otherwise a
`tuple` is returned where the first element is a list with the generated images and the second element
is a list of generated texts.
"""
# 0. Default height and width to unet
height = height or self.unet_resolution * self.vae_scale_factor
width = width or self.unet_resolution * self.vae_scale_factor
# 1. Check inputs
# Recalculate mode for each call to the pipeline.
mode = self._infer_mode(prompt, prompt_embeds, image, latents, prompt_latents, vae_latents, clip_latents)
self.check_inputs(
mode,
prompt,
image,
height,
width,
callback_steps,
negative_prompt,
prompt_embeds,
negative_prompt_embeds,
latents,
prompt_latents,
vae_latents,
clip_latents,
)
# 2. Define call parameters
batch_size, multiplier = self._infer_batch_size(
mode,
prompt,
prompt_embeds,
image,
num_images_per_prompt,
num_prompts_per_image,
latents,
prompt_latents,
vae_latents,
clip_latents,
)
device = self._execution_device
reduce_text_emb_dim = self.text_intermediate_dim < self.text_encoder_hidden_size or self.mode != "text2img"
# here `guidance_scale` is defined analog to the guidance weight `w` of equation (2)
# of the Imagen paper: https://arxiv.org/pdf/2205.11487.pdf . `guidance_scale = 1`
# corresponds to doing no classifier free guidance.
# Note that this differs from the formulation in the unidiffusers paper!
do_classifier_free_guidance = guidance_scale > 1.0
# check if scheduler is in sigmas space
# scheduler_is_in_sigma_space = hasattr(self.scheduler, "sigmas")
# 3. Encode input prompt, if available; otherwise prepare text latents
if latents is not None:
# Overwrite individual latents
vae_latents, clip_latents, prompt_latents = self._split_joint(latents, height, width)
if mode in ["text2img"]:
# 3.1. Encode input prompt, if available
assert prompt is not None or prompt_embeds is not None
prompt_embeds, negative_prompt_embeds = self.encode_prompt(
prompt=prompt,
device=device,
num_images_per_prompt=multiplier,
do_classifier_free_guidance=do_classifier_free_guidance,
negative_prompt=negative_prompt,
prompt_embeds=prompt_embeds,
negative_prompt_embeds=negative_prompt_embeds,
)
# if do_classifier_free_guidance:
# prompt_embeds = torch.cat([negative_prompt_embeds, prompt_embeds])
else:
# 3.2. Prepare text latent variables, if input not available
prompt_embeds = self.prepare_text_latents(
batch_size=batch_size,
num_images_per_prompt=multiplier,
seq_len=self.text_encoder_seq_len,
hidden_size=self.text_encoder_hidden_size,
dtype=self.text_encoder.dtype, # Should work with both full precision and mixed precision
device=device,
generator=generator,
latents=prompt_latents,
)
if reduce_text_emb_dim:
prompt_embeds = self.text_decoder.encode(prompt_embeds)
# 4. Encode image, if available; otherwise prepare image latents
if mode in ["img2text"]:
# 4.1. Encode images, if available
assert image is not None, "`img2text` requires a conditioning image"
# Encode image using VAE
image_vae = self.image_processor.preprocess(image)
height, width = image_vae.shape[-2:]
image_vae_latents = self.encode_image_vae_latents(
image=image_vae,
batch_size=batch_size,
num_prompts_per_image=multiplier,
dtype=prompt_embeds.dtype,
device=device,
do_classifier_free_guidance=False, # Copied from InstructPix2Pix, don't use their version of CFG
generator=generator,
)
# Encode image using CLIP
image_clip_latents = self.encode_image_clip_latents(
image=image,
batch_size=batch_size,
num_prompts_per_image=multiplier,
dtype=prompt_embeds.dtype,
device=device,
generator=generator,
)
# (batch_size, clip_hidden_size) => (batch_size, 1, clip_hidden_size)
image_clip_latents = image_clip_latents.unsqueeze(1)
else:
# 4.2. Prepare image latent variables, if input not available
# Prepare image VAE latents in latent space
image_vae_latents = self.prepare_image_vae_latents(
batch_size=batch_size,
num_prompts_per_image=multiplier,
num_channels_latents=self.num_channels_latents,
height=height,
width=width,
dtype=prompt_embeds.dtype,
device=device,
generator=generator,
latents=vae_latents,
)
# Prepare image CLIP latents
image_clip_latents = self.prepare_image_clip_latents(
batch_size=batch_size,
num_prompts_per_image=multiplier,
clip_img_dim=self.image_encoder_projection_dim,
dtype=prompt_embeds.dtype,
device=device,
generator=generator,
latents=clip_latents,
)
# 5. Set timesteps
self.scheduler.set_timesteps(num_inference_steps, device=device)
timesteps = self.scheduler.timesteps
# max_timestep = timesteps[0]
max_timestep = self.scheduler.config.num_train_timesteps
# 6. Prepare latent variables
if mode == "joint":
latents = self._combine_joint(image_vae_latents, image_clip_latents, prompt_embeds)
elif mode in ["text2img", "img"]:
latents = self._combine(image_vae_latents, image_clip_latents)
elif mode in ["img2text", "text"]:
latents = prompt_embeds
# 7. Prepare extra step kwargs. TODO: Logic should ideally just be moved out of the pipeline
extra_step_kwargs = self.prepare_extra_step_kwargs(generator, eta)
logger.debug(f"Scheduler extra step kwargs: {extra_step_kwargs}")
# 8. Denoising loop
num_warmup_steps = len(timesteps) - num_inference_steps * self.scheduler.order
with self.progress_bar(total=num_inference_steps) as progress_bar:
for i, t in enumerate(timesteps):
# predict the noise residual
# Also applies classifier-free guidance as described in the UniDiffuser paper
noise_pred = self._get_noise_pred(
mode,
latents,
t,
prompt_embeds,
image_vae_latents,
image_clip_latents,
max_timestep,
data_type,
guidance_scale,
generator,
device,
height,
width,
)
# compute the previous noisy sample x_t -> x_t-1
latents = self.scheduler.step(noise_pred, t, latents, **extra_step_kwargs).prev_sample
# call the callback, if provided
if i == len(timesteps) - 1 or ((i + 1) > num_warmup_steps and (i + 1) % self.scheduler.order == 0):
progress_bar.update()
if callback is not None and i % callback_steps == 0:
step_idx = i // getattr(self.scheduler, "order", 1)
callback(step_idx, t, latents)
# 9. Post-processing
image = None
text = None
if mode == "joint":
image_vae_latents, image_clip_latents, text_latents = self._split_joint(latents, height, width)
if not output_type == "latent":
# Map latent VAE image back to pixel space
image = self.vae.decode(image_vae_latents / self.vae.config.scaling_factor, return_dict=False)[0]
else:
image = image_vae_latents
text = self.decode_text_latents(text_latents, device)
elif mode in ["text2img", "img"]:
image_vae_latents, image_clip_latents = self._split(latents, height, width)
if not output_type == "latent":
# Map latent VAE image back to pixel space
image = self.vae.decode(image_vae_latents / self.vae.config.scaling_factor, return_dict=False)[0]
else:
image = image_vae_latents
elif mode in ["img2text", "text"]:
text_latents = latents
text = self.decode_text_latents(text_latents, device)
self.maybe_free_model_hooks()
# 10. Postprocess the image, if necessary
if image is not None:
do_denormalize = [True] * image.shape[0]
image = self.image_processor.postprocess(image, output_type=output_type, do_denormalize=do_denormalize)
# Offload last model to CPU
if hasattr(self, "final_offload_hook") and self.final_offload_hook is not None:
self.final_offload_hook.offload()
if not return_dict:
return (image, text)
return ImageTextPipelineOutput(images=image, text=text)
| diffusers/src/diffusers/pipelines/unidiffuser/pipeline_unidiffuser.py/0 | {
"file_path": "diffusers/src/diffusers/pipelines/unidiffuser/pipeline_unidiffuser.py",
"repo_id": "diffusers",
"token_count": 31017
} | 122 |
import math
from dataclasses import dataclass
from typing import Optional, Tuple, Union
import torch
from ..configuration_utils import ConfigMixin, register_to_config
from ..utils import BaseOutput
from ..utils.torch_utils import randn_tensor
from .scheduling_utils import SchedulerMixin
# Copied from diffusers.schedulers.scheduling_ddpm.betas_for_alpha_bar
def betas_for_alpha_bar(
num_diffusion_timesteps,
max_beta=0.999,
alpha_transform_type="cosine",
):
"""
Create a beta schedule that discretizes the given alpha_t_bar function, which defines the cumulative product of
(1-beta) over time from t = [0,1].
Contains a function alpha_bar that takes an argument t and transforms it to the cumulative product of (1-beta) up
to that part of the diffusion process.
Args:
num_diffusion_timesteps (`int`): the number of betas to produce.
max_beta (`float`): the maximum beta to use; use values lower than 1 to
prevent singularities.
alpha_transform_type (`str`, *optional*, default to `cosine`): the type of noise schedule for alpha_bar.
Choose from `cosine` or `exp`
Returns:
betas (`np.ndarray`): the betas used by the scheduler to step the model outputs
"""
if alpha_transform_type == "cosine":
def alpha_bar_fn(t):
return math.cos((t + 0.008) / 1.008 * math.pi / 2) ** 2
elif alpha_transform_type == "exp":
def alpha_bar_fn(t):
return math.exp(t * -12.0)
else:
raise ValueError(f"Unsupported alpha_tranform_type: {alpha_transform_type}")
betas = []
for i in range(num_diffusion_timesteps):
t1 = i / num_diffusion_timesteps
t2 = (i + 1) / num_diffusion_timesteps
betas.append(min(1 - alpha_bar_fn(t2) / alpha_bar_fn(t1), max_beta))
return torch.tensor(betas, dtype=torch.float32)
@dataclass
class ConsistencyDecoderSchedulerOutput(BaseOutput):
"""
Output class for the scheduler's `step` function.
Args:
prev_sample (`torch.FloatTensor` of shape `(batch_size, num_channels, height, width)` for images):
Computed sample `(x_{t-1})` of previous timestep. `prev_sample` should be used as next model input in the
denoising loop.
"""
prev_sample: torch.FloatTensor
class ConsistencyDecoderScheduler(SchedulerMixin, ConfigMixin):
order = 1
@register_to_config
def __init__(
self,
num_train_timesteps: int = 1024,
sigma_data: float = 0.5,
):
betas = betas_for_alpha_bar(num_train_timesteps)
alphas = 1.0 - betas
alphas_cumprod = torch.cumprod(alphas, dim=0)
self.sqrt_alphas_cumprod = torch.sqrt(alphas_cumprod)
self.sqrt_one_minus_alphas_cumprod = torch.sqrt(1.0 - alphas_cumprod)
sigmas = torch.sqrt(1.0 / alphas_cumprod - 1)
sqrt_recip_alphas_cumprod = torch.sqrt(1.0 / alphas_cumprod)
self.c_skip = sqrt_recip_alphas_cumprod * sigma_data**2 / (sigmas**2 + sigma_data**2)
self.c_out = sigmas * sigma_data / (sigmas**2 + sigma_data**2) ** 0.5
self.c_in = sqrt_recip_alphas_cumprod / (sigmas**2 + sigma_data**2) ** 0.5
def set_timesteps(
self,
num_inference_steps: Optional[int] = None,
device: Union[str, torch.device] = None,
):
if num_inference_steps != 2:
raise ValueError("Currently more than 2 inference steps are not supported.")
self.timesteps = torch.tensor([1008, 512], dtype=torch.long, device=device)
self.sqrt_alphas_cumprod = self.sqrt_alphas_cumprod.to(device)
self.sqrt_one_minus_alphas_cumprod = self.sqrt_one_minus_alphas_cumprod.to(device)
self.c_skip = self.c_skip.to(device)
self.c_out = self.c_out.to(device)
self.c_in = self.c_in.to(device)
@property
def init_noise_sigma(self):
return self.sqrt_one_minus_alphas_cumprod[self.timesteps[0]]
def scale_model_input(self, sample: torch.FloatTensor, timestep: Optional[int] = None) -> torch.FloatTensor:
"""
Ensures interchangeability with schedulers that need to scale the denoising model input depending on the
current timestep.
Args:
sample (`torch.FloatTensor`):
The input sample.
timestep (`int`, *optional*):
The current timestep in the diffusion chain.
Returns:
`torch.FloatTensor`:
A scaled input sample.
"""
return sample * self.c_in[timestep]
def step(
self,
model_output: torch.FloatTensor,
timestep: Union[float, torch.FloatTensor],
sample: torch.FloatTensor,
generator: Optional[torch.Generator] = None,
return_dict: bool = True,
) -> Union[ConsistencyDecoderSchedulerOutput, Tuple]:
"""
Predict the sample from the previous timestep by reversing the SDE. This function propagates the diffusion
process from the learned model outputs (most often the predicted noise).
Args:
model_output (`torch.FloatTensor`):
The direct output from the learned diffusion model.
timestep (`float`):
The current timestep in the diffusion chain.
sample (`torch.FloatTensor`):
A current instance of a sample created by the diffusion process.
generator (`torch.Generator`, *optional*):
A random number generator.
return_dict (`bool`, *optional*, defaults to `True`):
Whether or not to return a
[`~schedulers.scheduling_consistency_models.ConsistencyDecoderSchedulerOutput`] or `tuple`.
Returns:
[`~schedulers.scheduling_consistency_models.ConsistencyDecoderSchedulerOutput`] or `tuple`:
If return_dict is `True`,
[`~schedulers.scheduling_consistency_models.ConsistencyDecoderSchedulerOutput`] is returned, otherwise
a tuple is returned where the first element is the sample tensor.
"""
x_0 = self.c_out[timestep] * model_output + self.c_skip[timestep] * sample
timestep_idx = torch.where(self.timesteps == timestep)[0]
if timestep_idx == len(self.timesteps) - 1:
prev_sample = x_0
else:
noise = randn_tensor(x_0.shape, generator=generator, dtype=x_0.dtype, device=x_0.device)
prev_sample = (
self.sqrt_alphas_cumprod[self.timesteps[timestep_idx + 1]].to(x_0.dtype) * x_0
+ self.sqrt_one_minus_alphas_cumprod[self.timesteps[timestep_idx + 1]].to(x_0.dtype) * noise
)
if not return_dict:
return (prev_sample,)
return ConsistencyDecoderSchedulerOutput(prev_sample=prev_sample)
| diffusers/src/diffusers/schedulers/scheduling_consistency_decoder.py/0 | {
"file_path": "diffusers/src/diffusers/schedulers/scheduling_consistency_decoder.py",
"repo_id": "diffusers",
"token_count": 3036
} | 123 |
# Copyright 2023 Katherine Crowson and The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import math
from dataclasses import dataclass
from typing import List, Optional, Tuple, Union
import numpy as np
import torch
from ..configuration_utils import ConfigMixin, register_to_config
from ..utils import BaseOutput, logging
from ..utils.torch_utils import randn_tensor
from .scheduling_utils import KarrasDiffusionSchedulers, SchedulerMixin
logger = logging.get_logger(__name__) # pylint: disable=invalid-name
@dataclass
# Copied from diffusers.schedulers.scheduling_ddpm.DDPMSchedulerOutput with DDPM->EulerAncestralDiscrete
class EulerAncestralDiscreteSchedulerOutput(BaseOutput):
"""
Output class for the scheduler's `step` function output.
Args:
prev_sample (`torch.FloatTensor` of shape `(batch_size, num_channels, height, width)` for images):
Computed sample `(x_{t-1})` of previous timestep. `prev_sample` should be used as next model input in the
denoising loop.
pred_original_sample (`torch.FloatTensor` of shape `(batch_size, num_channels, height, width)` for images):
The predicted denoised sample `(x_{0})` based on the model output from the current timestep.
`pred_original_sample` can be used to preview progress or for guidance.
"""
prev_sample: torch.FloatTensor
pred_original_sample: Optional[torch.FloatTensor] = None
# Copied from diffusers.schedulers.scheduling_ddpm.betas_for_alpha_bar
def betas_for_alpha_bar(
num_diffusion_timesteps,
max_beta=0.999,
alpha_transform_type="cosine",
):
"""
Create a beta schedule that discretizes the given alpha_t_bar function, which defines the cumulative product of
(1-beta) over time from t = [0,1].
Contains a function alpha_bar that takes an argument t and transforms it to the cumulative product of (1-beta) up
to that part of the diffusion process.
Args:
num_diffusion_timesteps (`int`): the number of betas to produce.
max_beta (`float`): the maximum beta to use; use values lower than 1 to
prevent singularities.
alpha_transform_type (`str`, *optional*, default to `cosine`): the type of noise schedule for alpha_bar.
Choose from `cosine` or `exp`
Returns:
betas (`np.ndarray`): the betas used by the scheduler to step the model outputs
"""
if alpha_transform_type == "cosine":
def alpha_bar_fn(t):
return math.cos((t + 0.008) / 1.008 * math.pi / 2) ** 2
elif alpha_transform_type == "exp":
def alpha_bar_fn(t):
return math.exp(t * -12.0)
else:
raise ValueError(f"Unsupported alpha_tranform_type: {alpha_transform_type}")
betas = []
for i in range(num_diffusion_timesteps):
t1 = i / num_diffusion_timesteps
t2 = (i + 1) / num_diffusion_timesteps
betas.append(min(1 - alpha_bar_fn(t2) / alpha_bar_fn(t1), max_beta))
return torch.tensor(betas, dtype=torch.float32)
# Copied from diffusers.schedulers.scheduling_ddim.rescale_zero_terminal_snr
def rescale_zero_terminal_snr(betas):
"""
Rescales betas to have zero terminal SNR Based on https://arxiv.org/pdf/2305.08891.pdf (Algorithm 1)
Args:
betas (`torch.FloatTensor`):
the betas that the scheduler is being initialized with.
Returns:
`torch.FloatTensor`: rescaled betas with zero terminal SNR
"""
# Convert betas to alphas_bar_sqrt
alphas = 1.0 - betas
alphas_cumprod = torch.cumprod(alphas, dim=0)
alphas_bar_sqrt = alphas_cumprod.sqrt()
# Store old values.
alphas_bar_sqrt_0 = alphas_bar_sqrt[0].clone()
alphas_bar_sqrt_T = alphas_bar_sqrt[-1].clone()
# Shift so the last timestep is zero.
alphas_bar_sqrt -= alphas_bar_sqrt_T
# Scale so the first timestep is back to the old value.
alphas_bar_sqrt *= alphas_bar_sqrt_0 / (alphas_bar_sqrt_0 - alphas_bar_sqrt_T)
# Convert alphas_bar_sqrt to betas
alphas_bar = alphas_bar_sqrt**2 # Revert sqrt
alphas = alphas_bar[1:] / alphas_bar[:-1] # Revert cumprod
alphas = torch.cat([alphas_bar[0:1], alphas])
betas = 1 - alphas
return betas
class EulerAncestralDiscreteScheduler(SchedulerMixin, ConfigMixin):
"""
Ancestral sampling with Euler method steps.
This model inherits from [`SchedulerMixin`] and [`ConfigMixin`]. Check the superclass documentation for the generic
methods the library implements for all schedulers such as loading and saving.
Args:
num_train_timesteps (`int`, defaults to 1000):
The number of diffusion steps to train the model.
beta_start (`float`, defaults to 0.0001):
The starting `beta` value of inference.
beta_end (`float`, defaults to 0.02):
The final `beta` value.
beta_schedule (`str`, defaults to `"linear"`):
The beta schedule, a mapping from a beta range to a sequence of betas for stepping the model. Choose from
`linear` or `scaled_linear`.
trained_betas (`np.ndarray`, *optional*):
Pass an array of betas directly to the constructor to bypass `beta_start` and `beta_end`.
prediction_type (`str`, defaults to `epsilon`, *optional*):
Prediction type of the scheduler function; can be `epsilon` (predicts the noise of the diffusion process),
`sample` (directly predicts the noisy sample`) or `v_prediction` (see section 2.4 of [Imagen
Video](https://imagen.research.google/video/paper.pdf) paper).
timestep_spacing (`str`, defaults to `"linspace"`):
The way the timesteps should be scaled. Refer to Table 2 of the [Common Diffusion Noise Schedules and
Sample Steps are Flawed](https://huggingface.co/papers/2305.08891) for more information.
steps_offset (`int`, defaults to 0):
An offset added to the inference steps. You can use a combination of `offset=1` and
`set_alpha_to_one=False` to make the last step use step 0 for the previous alpha product like in Stable
Diffusion.
rescale_betas_zero_snr (`bool`, defaults to `False`):
Whether to rescale the betas to have zero terminal SNR. This enables the model to generate very bright and
dark samples instead of limiting it to samples with medium brightness. Loosely related to
[`--offset_noise`](https://github.com/huggingface/diffusers/blob/74fd735eb073eb1d774b1ab4154a0876eb82f055/examples/dreambooth/train_dreambooth.py#L506).
"""
_compatibles = [e.name for e in KarrasDiffusionSchedulers]
order = 1
@register_to_config
def __init__(
self,
num_train_timesteps: int = 1000,
beta_start: float = 0.0001,
beta_end: float = 0.02,
beta_schedule: str = "linear",
trained_betas: Optional[Union[np.ndarray, List[float]]] = None,
prediction_type: str = "epsilon",
timestep_spacing: str = "linspace",
steps_offset: int = 0,
rescale_betas_zero_snr: bool = False,
):
if trained_betas is not None:
self.betas = torch.tensor(trained_betas, dtype=torch.float32)
elif beta_schedule == "linear":
self.betas = torch.linspace(beta_start, beta_end, num_train_timesteps, dtype=torch.float32)
elif beta_schedule == "scaled_linear":
# this schedule is very specific to the latent diffusion model.
self.betas = torch.linspace(beta_start**0.5, beta_end**0.5, num_train_timesteps, dtype=torch.float32) ** 2
elif beta_schedule == "squaredcos_cap_v2":
# Glide cosine schedule
self.betas = betas_for_alpha_bar(num_train_timesteps)
else:
raise NotImplementedError(f"{beta_schedule} does is not implemented for {self.__class__}")
if rescale_betas_zero_snr:
self.betas = rescale_zero_terminal_snr(self.betas)
self.alphas = 1.0 - self.betas
self.alphas_cumprod = torch.cumprod(self.alphas, dim=0)
if rescale_betas_zero_snr:
# Close to 0 without being 0 so first sigma is not inf
# FP16 smallest positive subnormal works well here
self.alphas_cumprod[-1] = 2**-24
sigmas = np.array(((1 - self.alphas_cumprod) / self.alphas_cumprod) ** 0.5)
sigmas = np.concatenate([sigmas[::-1], [0.0]]).astype(np.float32)
self.sigmas = torch.from_numpy(sigmas)
# setable values
self.num_inference_steps = None
timesteps = np.linspace(0, num_train_timesteps - 1, num_train_timesteps, dtype=float)[::-1].copy()
self.timesteps = torch.from_numpy(timesteps)
self.is_scale_input_called = False
self._step_index = None
self._begin_index = None
self.sigmas = self.sigmas.to("cpu") # to avoid too much CPU/GPU communication
@property
def init_noise_sigma(self):
# standard deviation of the initial noise distribution
if self.config.timestep_spacing in ["linspace", "trailing"]:
return self.sigmas.max()
return (self.sigmas.max() ** 2 + 1) ** 0.5
@property
def step_index(self):
"""
The index counter for current timestep. It will increae 1 after each scheduler step.
"""
return self._step_index
@property
def begin_index(self):
"""
The index for the first timestep. It should be set from pipeline with `set_begin_index` method.
"""
return self._begin_index
# Copied from diffusers.schedulers.scheduling_dpmsolver_multistep.DPMSolverMultistepScheduler.set_begin_index
def set_begin_index(self, begin_index: int = 0):
"""
Sets the begin index for the scheduler. This function should be run from pipeline before the inference.
Args:
begin_index (`int`):
The begin index for the scheduler.
"""
self._begin_index = begin_index
def scale_model_input(
self, sample: torch.FloatTensor, timestep: Union[float, torch.FloatTensor]
) -> torch.FloatTensor:
"""
Ensures interchangeability with schedulers that need to scale the denoising model input depending on the
current timestep. Scales the denoising model input by `(sigma**2 + 1) ** 0.5` to match the Euler algorithm.
Args:
sample (`torch.FloatTensor`):
The input sample.
timestep (`int`, *optional*):
The current timestep in the diffusion chain.
Returns:
`torch.FloatTensor`:
A scaled input sample.
"""
if self.step_index is None:
self._init_step_index(timestep)
sigma = self.sigmas[self.step_index]
sample = sample / ((sigma**2 + 1) ** 0.5)
self.is_scale_input_called = True
return sample
def set_timesteps(self, num_inference_steps: int, device: Union[str, torch.device] = None):
"""
Sets the discrete timesteps used for the diffusion chain (to be run before inference).
Args:
num_inference_steps (`int`):
The number of diffusion steps used when generating samples with a pre-trained model.
device (`str` or `torch.device`, *optional*):
The device to which the timesteps should be moved to. If `None`, the timesteps are not moved.
"""
self.num_inference_steps = num_inference_steps
# "linspace", "leading", "trailing" corresponds to annotation of Table 2. of https://arxiv.org/abs/2305.08891
if self.config.timestep_spacing == "linspace":
timesteps = np.linspace(0, self.config.num_train_timesteps - 1, num_inference_steps, dtype=np.float32)[
::-1
].copy()
elif self.config.timestep_spacing == "leading":
step_ratio = self.config.num_train_timesteps // self.num_inference_steps
# creates integer timesteps by multiplying by ratio
# casting to int to avoid issues when num_inference_step is power of 3
timesteps = (np.arange(0, num_inference_steps) * step_ratio).round()[::-1].copy().astype(np.float32)
timesteps += self.config.steps_offset
elif self.config.timestep_spacing == "trailing":
step_ratio = self.config.num_train_timesteps / self.num_inference_steps
# creates integer timesteps by multiplying by ratio
# casting to int to avoid issues when num_inference_step is power of 3
timesteps = (np.arange(self.config.num_train_timesteps, 0, -step_ratio)).round().copy().astype(np.float32)
timesteps -= 1
else:
raise ValueError(
f"{self.config.timestep_spacing} is not supported. Please make sure to choose one of 'linspace', 'leading' or 'trailing'."
)
sigmas = np.array(((1 - self.alphas_cumprod) / self.alphas_cumprod) ** 0.5)
sigmas = np.interp(timesteps, np.arange(0, len(sigmas)), sigmas)
sigmas = np.concatenate([sigmas, [0.0]]).astype(np.float32)
self.sigmas = torch.from_numpy(sigmas).to(device=device)
self.timesteps = torch.from_numpy(timesteps).to(device=device)
self._step_index = None
self._begin_index = None
self.sigmas = self.sigmas.to("cpu") # to avoid too much CPU/GPU communication
# Copied from diffusers.schedulers.scheduling_euler_discrete.EulerDiscreteScheduler.index_for_timestep
def index_for_timestep(self, timestep, schedule_timesteps=None):
if schedule_timesteps is None:
schedule_timesteps = self.timesteps
indices = (schedule_timesteps == timestep).nonzero()
# The sigma index that is taken for the **very** first `step`
# is always the second index (or the last index if there is only 1)
# This way we can ensure we don't accidentally skip a sigma in
# case we start in the middle of the denoising schedule (e.g. for image-to-image)
pos = 1 if len(indices) > 1 else 0
return indices[pos].item()
# Copied from diffusers.schedulers.scheduling_euler_discrete.EulerDiscreteScheduler._init_step_index
def _init_step_index(self, timestep):
if self.begin_index is None:
if isinstance(timestep, torch.Tensor):
timestep = timestep.to(self.timesteps.device)
self._step_index = self.index_for_timestep(timestep)
else:
self._step_index = self._begin_index
def step(
self,
model_output: torch.FloatTensor,
timestep: Union[float, torch.FloatTensor],
sample: torch.FloatTensor,
generator: Optional[torch.Generator] = None,
return_dict: bool = True,
) -> Union[EulerAncestralDiscreteSchedulerOutput, Tuple]:
"""
Predict the sample from the previous timestep by reversing the SDE. This function propagates the diffusion
process from the learned model outputs (most often the predicted noise).
Args:
model_output (`torch.FloatTensor`):
The direct output from learned diffusion model.
timestep (`float`):
The current discrete timestep in the diffusion chain.
sample (`torch.FloatTensor`):
A current instance of a sample created by the diffusion process.
generator (`torch.Generator`, *optional*):
A random number generator.
return_dict (`bool`):
Whether or not to return a
[`~schedulers.scheduling_euler_ancestral_discrete.EulerAncestralDiscreteSchedulerOutput`] or tuple.
Returns:
[`~schedulers.scheduling_euler_ancestral_discrete.EulerAncestralDiscreteSchedulerOutput`] or `tuple`:
If return_dict is `True`,
[`~schedulers.scheduling_euler_ancestral_discrete.EulerAncestralDiscreteSchedulerOutput`] is returned,
otherwise a tuple is returned where the first element is the sample tensor.
"""
if (
isinstance(timestep, int)
or isinstance(timestep, torch.IntTensor)
or isinstance(timestep, torch.LongTensor)
):
raise ValueError(
(
"Passing integer indices (e.g. from `enumerate(timesteps)`) as timesteps to"
" `EulerDiscreteScheduler.step()` is not supported. Make sure to pass"
" one of the `scheduler.timesteps` as a timestep."
),
)
if not self.is_scale_input_called:
logger.warning(
"The `scale_model_input` function should be called before `step` to ensure correct denoising. "
"See `StableDiffusionPipeline` for a usage example."
)
if self.step_index is None:
self._init_step_index(timestep)
sigma = self.sigmas[self.step_index]
# Upcast to avoid precision issues when computing prev_sample
sample = sample.to(torch.float32)
# 1. compute predicted original sample (x_0) from sigma-scaled predicted noise
if self.config.prediction_type == "epsilon":
pred_original_sample = sample - sigma * model_output
elif self.config.prediction_type == "v_prediction":
# * c_out + input * c_skip
pred_original_sample = model_output * (-sigma / (sigma**2 + 1) ** 0.5) + (sample / (sigma**2 + 1))
elif self.config.prediction_type == "sample":
raise NotImplementedError("prediction_type not implemented yet: sample")
else:
raise ValueError(
f"prediction_type given as {self.config.prediction_type} must be one of `epsilon`, or `v_prediction`"
)
sigma_from = self.sigmas[self.step_index]
sigma_to = self.sigmas[self.step_index + 1]
sigma_up = (sigma_to**2 * (sigma_from**2 - sigma_to**2) / sigma_from**2) ** 0.5
sigma_down = (sigma_to**2 - sigma_up**2) ** 0.5
# 2. Convert to an ODE derivative
derivative = (sample - pred_original_sample) / sigma
dt = sigma_down - sigma
prev_sample = sample + derivative * dt
device = model_output.device
noise = randn_tensor(model_output.shape, dtype=model_output.dtype, device=device, generator=generator)
prev_sample = prev_sample + noise * sigma_up
# Cast sample back to model compatible dtype
prev_sample = prev_sample.to(model_output.dtype)
# upon completion increase step index by one
self._step_index += 1
if not return_dict:
return (prev_sample,)
return EulerAncestralDiscreteSchedulerOutput(
prev_sample=prev_sample, pred_original_sample=pred_original_sample
)
# Copied from diffusers.schedulers.scheduling_euler_discrete.EulerDiscreteScheduler.add_noise
def add_noise(
self,
original_samples: torch.FloatTensor,
noise: torch.FloatTensor,
timesteps: torch.FloatTensor,
) -> torch.FloatTensor:
# Make sure sigmas and timesteps have the same device and dtype as original_samples
sigmas = self.sigmas.to(device=original_samples.device, dtype=original_samples.dtype)
if original_samples.device.type == "mps" and torch.is_floating_point(timesteps):
# mps does not support float64
schedule_timesteps = self.timesteps.to(original_samples.device, dtype=torch.float32)
timesteps = timesteps.to(original_samples.device, dtype=torch.float32)
else:
schedule_timesteps = self.timesteps.to(original_samples.device)
timesteps = timesteps.to(original_samples.device)
# self.begin_index is None when scheduler is used for training, or pipeline does not implement set_begin_index
if self.begin_index is None:
step_indices = [self.index_for_timestep(t, schedule_timesteps) for t in timesteps]
else:
step_indices = [self.begin_index] * timesteps.shape[0]
sigma = sigmas[step_indices].flatten()
while len(sigma.shape) < len(original_samples.shape):
sigma = sigma.unsqueeze(-1)
noisy_samples = original_samples + noise * sigma
return noisy_samples
def __len__(self):
return self.config.num_train_timesteps
| diffusers/src/diffusers/schedulers/scheduling_euler_ancestral_discrete.py/0 | {
"file_path": "diffusers/src/diffusers/schedulers/scheduling_euler_ancestral_discrete.py",
"repo_id": "diffusers",
"token_count": 8876
} | 124 |
# Copyright 2023 Google Brain and The HuggingFace Team. All rights reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
# DISCLAIMER: This file is strongly influenced by https://github.com/yang-song/score_sde_pytorch
from dataclasses import dataclass
from typing import Optional, Tuple, Union
import flax
import jax
import jax.numpy as jnp
from jax import random
from ..configuration_utils import ConfigMixin, register_to_config
from .scheduling_utils_flax import FlaxSchedulerMixin, FlaxSchedulerOutput, broadcast_to_shape_from_left
@flax.struct.dataclass
class ScoreSdeVeSchedulerState:
# setable values
timesteps: Optional[jnp.ndarray] = None
discrete_sigmas: Optional[jnp.ndarray] = None
sigmas: Optional[jnp.ndarray] = None
@classmethod
def create(cls):
return cls()
@dataclass
class FlaxSdeVeOutput(FlaxSchedulerOutput):
"""
Output class for the ScoreSdeVeScheduler's step function output.
Args:
state (`ScoreSdeVeSchedulerState`):
prev_sample (`jnp.ndarray` of shape `(batch_size, num_channels, height, width)` for images):
Computed sample (x_{t-1}) of previous timestep. `prev_sample` should be used as next model input in the
denoising loop.
prev_sample_mean (`jnp.ndarray` of shape `(batch_size, num_channels, height, width)` for images):
Mean averaged `prev_sample`. Same as `prev_sample`, only mean-averaged over previous timesteps.
"""
state: ScoreSdeVeSchedulerState
prev_sample: jnp.ndarray
prev_sample_mean: Optional[jnp.ndarray] = None
class FlaxScoreSdeVeScheduler(FlaxSchedulerMixin, ConfigMixin):
"""
The variance exploding stochastic differential equation (SDE) scheduler.
For more information, see the original paper: https://arxiv.org/abs/2011.13456
[`~ConfigMixin`] takes care of storing all config attributes that are passed in the scheduler's `__init__`
function, such as `num_train_timesteps`. They can be accessed via `scheduler.config.num_train_timesteps`.
[`SchedulerMixin`] provides general loading and saving functionality via the [`SchedulerMixin.save_pretrained`] and
[`~SchedulerMixin.from_pretrained`] functions.
Args:
num_train_timesteps (`int`): number of diffusion steps used to train the model.
snr (`float`):
coefficient weighting the step from the model_output sample (from the network) to the random noise.
sigma_min (`float`):
initial noise scale for sigma sequence in sampling procedure. The minimum sigma should mirror the
distribution of the data.
sigma_max (`float`): maximum value used for the range of continuous timesteps passed into the model.
sampling_eps (`float`): the end value of sampling, where timesteps decrease progressively from 1 to
epsilon.
correct_steps (`int`): number of correction steps performed on a produced sample.
"""
@property
def has_state(self):
return True
@register_to_config
def __init__(
self,
num_train_timesteps: int = 2000,
snr: float = 0.15,
sigma_min: float = 0.01,
sigma_max: float = 1348.0,
sampling_eps: float = 1e-5,
correct_steps: int = 1,
):
pass
def create_state(self):
state = ScoreSdeVeSchedulerState.create()
return self.set_sigmas(
state,
self.config.num_train_timesteps,
self.config.sigma_min,
self.config.sigma_max,
self.config.sampling_eps,
)
def set_timesteps(
self, state: ScoreSdeVeSchedulerState, num_inference_steps: int, shape: Tuple = (), sampling_eps: float = None
) -> ScoreSdeVeSchedulerState:
"""
Sets the continuous timesteps used for the diffusion chain. Supporting function to be run before inference.
Args:
state (`ScoreSdeVeSchedulerState`): the `FlaxScoreSdeVeScheduler` state data class instance.
num_inference_steps (`int`):
the number of diffusion steps used when generating samples with a pre-trained model.
sampling_eps (`float`, optional):
final timestep value (overrides value given at Scheduler instantiation).
"""
sampling_eps = sampling_eps if sampling_eps is not None else self.config.sampling_eps
timesteps = jnp.linspace(1, sampling_eps, num_inference_steps)
return state.replace(timesteps=timesteps)
def set_sigmas(
self,
state: ScoreSdeVeSchedulerState,
num_inference_steps: int,
sigma_min: float = None,
sigma_max: float = None,
sampling_eps: float = None,
) -> ScoreSdeVeSchedulerState:
"""
Sets the noise scales used for the diffusion chain. Supporting function to be run before inference.
The sigmas control the weight of the `drift` and `diffusion` components of sample update.
Args:
state (`ScoreSdeVeSchedulerState`): the `FlaxScoreSdeVeScheduler` state data class instance.
num_inference_steps (`int`):
the number of diffusion steps used when generating samples with a pre-trained model.
sigma_min (`float`, optional):
initial noise scale value (overrides value given at Scheduler instantiation).
sigma_max (`float`, optional):
final noise scale value (overrides value given at Scheduler instantiation).
sampling_eps (`float`, optional):
final timestep value (overrides value given at Scheduler instantiation).
"""
sigma_min = sigma_min if sigma_min is not None else self.config.sigma_min
sigma_max = sigma_max if sigma_max is not None else self.config.sigma_max
sampling_eps = sampling_eps if sampling_eps is not None else self.config.sampling_eps
if state.timesteps is None:
state = self.set_timesteps(state, num_inference_steps, sampling_eps)
discrete_sigmas = jnp.exp(jnp.linspace(jnp.log(sigma_min), jnp.log(sigma_max), num_inference_steps))
sigmas = jnp.array([sigma_min * (sigma_max / sigma_min) ** t for t in state.timesteps])
return state.replace(discrete_sigmas=discrete_sigmas, sigmas=sigmas)
def get_adjacent_sigma(self, state, timesteps, t):
return jnp.where(timesteps == 0, jnp.zeros_like(t), state.discrete_sigmas[timesteps - 1])
def step_pred(
self,
state: ScoreSdeVeSchedulerState,
model_output: jnp.ndarray,
timestep: int,
sample: jnp.ndarray,
key: jax.Array,
return_dict: bool = True,
) -> Union[FlaxSdeVeOutput, Tuple]:
"""
Predict the sample at the previous timestep by reversing the SDE. Core function to propagate the diffusion
process from the learned model outputs (most often the predicted noise).
Args:
state (`ScoreSdeVeSchedulerState`): the `FlaxScoreSdeVeScheduler` state data class instance.
model_output (`jnp.ndarray`): direct output from learned diffusion model.
timestep (`int`): current discrete timestep in the diffusion chain.
sample (`jnp.ndarray`):
current instance of sample being created by diffusion process.
generator: random number generator.
return_dict (`bool`): option for returning tuple rather than FlaxSdeVeOutput class
Returns:
[`FlaxSdeVeOutput`] or `tuple`: [`FlaxSdeVeOutput`] if `return_dict` is True, otherwise a `tuple`. When
returning a tuple, the first element is the sample tensor.
"""
if state.timesteps is None:
raise ValueError(
"`state.timesteps` is not set, you need to run 'set_timesteps' after creating the scheduler"
)
timestep = timestep * jnp.ones(
sample.shape[0],
)
timesteps = (timestep * (len(state.timesteps) - 1)).long()
sigma = state.discrete_sigmas[timesteps]
adjacent_sigma = self.get_adjacent_sigma(state, timesteps, timestep)
drift = jnp.zeros_like(sample)
diffusion = (sigma**2 - adjacent_sigma**2) ** 0.5
# equation 6 in the paper: the model_output modeled by the network is grad_x log pt(x)
# also equation 47 shows the analog from SDE models to ancestral sampling methods
diffusion = diffusion.flatten()
diffusion = broadcast_to_shape_from_left(diffusion, sample.shape)
drift = drift - diffusion**2 * model_output
# equation 6: sample noise for the diffusion term of
key = random.split(key, num=1)
noise = random.normal(key=key, shape=sample.shape)
prev_sample_mean = sample - drift # subtract because `dt` is a small negative timestep
# TODO is the variable diffusion the correct scaling term for the noise?
prev_sample = prev_sample_mean + diffusion * noise # add impact of diffusion field g
if not return_dict:
return (prev_sample, prev_sample_mean, state)
return FlaxSdeVeOutput(prev_sample=prev_sample, prev_sample_mean=prev_sample_mean, state=state)
def step_correct(
self,
state: ScoreSdeVeSchedulerState,
model_output: jnp.ndarray,
sample: jnp.ndarray,
key: jax.Array,
return_dict: bool = True,
) -> Union[FlaxSdeVeOutput, Tuple]:
"""
Correct the predicted sample based on the output model_output of the network. This is often run repeatedly
after making the prediction for the previous timestep.
Args:
state (`ScoreSdeVeSchedulerState`): the `FlaxScoreSdeVeScheduler` state data class instance.
model_output (`jnp.ndarray`): direct output from learned diffusion model.
sample (`jnp.ndarray`):
current instance of sample being created by diffusion process.
generator: random number generator.
return_dict (`bool`): option for returning tuple rather than FlaxSdeVeOutput class
Returns:
[`FlaxSdeVeOutput`] or `tuple`: [`FlaxSdeVeOutput`] if `return_dict` is True, otherwise a `tuple`. When
returning a tuple, the first element is the sample tensor.
"""
if state.timesteps is None:
raise ValueError(
"`state.timesteps` is not set, you need to run 'set_timesteps' after creating the scheduler"
)
# For small batch sizes, the paper "suggest replacing norm(z) with sqrt(d), where d is the dim. of z"
# sample noise for correction
key = random.split(key, num=1)
noise = random.normal(key=key, shape=sample.shape)
# compute step size from the model_output, the noise, and the snr
grad_norm = jnp.linalg.norm(model_output)
noise_norm = jnp.linalg.norm(noise)
step_size = (self.config.snr * noise_norm / grad_norm) ** 2 * 2
step_size = step_size * jnp.ones(sample.shape[0])
# compute corrected sample: model_output term and noise term
step_size = step_size.flatten()
step_size = broadcast_to_shape_from_left(step_size, sample.shape)
prev_sample_mean = sample + step_size * model_output
prev_sample = prev_sample_mean + ((step_size * 2) ** 0.5) * noise
if not return_dict:
return (prev_sample, state)
return FlaxSdeVeOutput(prev_sample=prev_sample, state=state)
def __len__(self):
return self.config.num_train_timesteps
| diffusers/src/diffusers/schedulers/scheduling_sde_ve_flax.py/0 | {
"file_path": "diffusers/src/diffusers/schedulers/scheduling_sde_ve_flax.py",
"repo_id": "diffusers",
"token_count": 4805
} | 125 |
# This file is autogenerated by the command `make fix-copies`, do not edit.
from ..utils import DummyObject, requires_backends
class AsymmetricAutoencoderKL(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class AutoencoderKL(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class AutoencoderKLTemporalDecoder(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class AutoencoderTiny(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class ConsistencyDecoderVAE(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class ControlNetModel(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class I2VGenXLUNet(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class Kandinsky3UNet(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class ModelMixin(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class MotionAdapter(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class MultiAdapter(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class PriorTransformer(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class T2IAdapter(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class T5FilmDecoder(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class Transformer2DModel(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class UNet1DModel(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class UNet2DConditionModel(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class UNet2DModel(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class UNet3DConditionModel(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class UNetMotionModel(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class UNetSpatioTemporalConditionModel(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class UVit2DModel(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class VQModel(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
def get_constant_schedule(*args, **kwargs):
requires_backends(get_constant_schedule, ["torch"])
def get_constant_schedule_with_warmup(*args, **kwargs):
requires_backends(get_constant_schedule_with_warmup, ["torch"])
def get_cosine_schedule_with_warmup(*args, **kwargs):
requires_backends(get_cosine_schedule_with_warmup, ["torch"])
def get_cosine_with_hard_restarts_schedule_with_warmup(*args, **kwargs):
requires_backends(get_cosine_with_hard_restarts_schedule_with_warmup, ["torch"])
def get_linear_schedule_with_warmup(*args, **kwargs):
requires_backends(get_linear_schedule_with_warmup, ["torch"])
def get_polynomial_decay_schedule_with_warmup(*args, **kwargs):
requires_backends(get_polynomial_decay_schedule_with_warmup, ["torch"])
def get_scheduler(*args, **kwargs):
requires_backends(get_scheduler, ["torch"])
class AudioPipelineOutput(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class AutoPipelineForImage2Image(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class AutoPipelineForInpainting(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class AutoPipelineForText2Image(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class BlipDiffusionControlNetPipeline(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class BlipDiffusionPipeline(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class CLIPImageProjection(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class ConsistencyModelPipeline(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class DanceDiffusionPipeline(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class DDIMPipeline(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class DDPMPipeline(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class DiffusionPipeline(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class DiTPipeline(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class ImagePipelineOutput(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class KarrasVePipeline(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class LDMPipeline(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class LDMSuperResolutionPipeline(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class PNDMPipeline(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class RePaintPipeline(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class ScoreSdeVePipeline(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class AmusedScheduler(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class CMStochasticIterativeScheduler(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class DDIMInverseScheduler(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class DDIMParallelScheduler(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class DDIMScheduler(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class DDPMParallelScheduler(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class DDPMScheduler(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class DDPMWuerstchenScheduler(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class DEISMultistepScheduler(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class DPMSolverMultistepInverseScheduler(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class DPMSolverMultistepScheduler(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class DPMSolverSinglestepScheduler(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class EulerAncestralDiscreteScheduler(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class EulerDiscreteScheduler(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class HeunDiscreteScheduler(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class IPNDMScheduler(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class KarrasVeScheduler(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class KDPM2AncestralDiscreteScheduler(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class KDPM2DiscreteScheduler(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class LCMScheduler(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class PNDMScheduler(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class RePaintScheduler(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class SASolverScheduler(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class SchedulerMixin(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class ScoreSdeVeScheduler(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class UnCLIPScheduler(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class UniPCMultistepScheduler(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class VQDiffusionScheduler(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
class EMAModel(metaclass=DummyObject):
_backends = ["torch"]
def __init__(self, *args, **kwargs):
requires_backends(self, ["torch"])
@classmethod
def from_config(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
@classmethod
def from_pretrained(cls, *args, **kwargs):
requires_backends(cls, ["torch"])
| diffusers/src/diffusers/utils/dummy_pt_objects.py/0 | {
"file_path": "diffusers/src/diffusers/utils/dummy_pt_objects.py",
"repo_id": "diffusers",
"token_count": 12125
} | 126 |
from typing import List
import PIL.Image
import PIL.ImageOps
from packaging import version
from PIL import Image
if version.parse(version.parse(PIL.__version__).base_version) >= version.parse("9.1.0"):
PIL_INTERPOLATION = {
"linear": PIL.Image.Resampling.BILINEAR,
"bilinear": PIL.Image.Resampling.BILINEAR,
"bicubic": PIL.Image.Resampling.BICUBIC,
"lanczos": PIL.Image.Resampling.LANCZOS,
"nearest": PIL.Image.Resampling.NEAREST,
}
else:
PIL_INTERPOLATION = {
"linear": PIL.Image.LINEAR,
"bilinear": PIL.Image.BILINEAR,
"bicubic": PIL.Image.BICUBIC,
"lanczos": PIL.Image.LANCZOS,
"nearest": PIL.Image.NEAREST,
}
def pt_to_pil(images):
"""
Convert a torch image to a PIL image.
"""
images = (images / 2 + 0.5).clamp(0, 1)
images = images.cpu().permute(0, 2, 3, 1).float().numpy()
images = numpy_to_pil(images)
return images
def numpy_to_pil(images):
"""
Convert a numpy image or a batch of images to a PIL image.
"""
if images.ndim == 3:
images = images[None, ...]
images = (images * 255).round().astype("uint8")
if images.shape[-1] == 1:
# special case for grayscale (single channel) images
pil_images = [Image.fromarray(image.squeeze(), mode="L") for image in images]
else:
pil_images = [Image.fromarray(image) for image in images]
return pil_images
def make_image_grid(images: List[PIL.Image.Image], rows: int, cols: int, resize: int = None) -> PIL.Image.Image:
"""
Prepares a single grid of images. Useful for visualization purposes.
"""
assert len(images) == rows * cols
if resize is not None:
images = [img.resize((resize, resize)) for img in images]
w, h = images[0].size
grid = Image.new("RGB", size=(cols * w, rows * h))
for i, img in enumerate(images):
grid.paste(img, box=(i % cols * w, i // cols * h))
return grid
| diffusers/src/diffusers/utils/pil_utils.py/0 | {
"file_path": "diffusers/src/diffusers/utils/pil_utils.py",
"repo_id": "diffusers",
"token_count": 849
} | 127 |
import unittest
from diffusers import FlaxAutoencoderKL
from diffusers.utils import is_flax_available
from diffusers.utils.testing_utils import require_flax
from ..test_modeling_common_flax import FlaxModelTesterMixin
if is_flax_available():
import jax
@require_flax
class FlaxAutoencoderKLTests(FlaxModelTesterMixin, unittest.TestCase):
model_class = FlaxAutoencoderKL
@property
def dummy_input(self):
batch_size = 4
num_channels = 3
sizes = (32, 32)
prng_key = jax.random.PRNGKey(0)
image = jax.random.uniform(prng_key, ((batch_size, num_channels) + sizes))
return {"sample": image, "prng_key": prng_key}
def prepare_init_args_and_inputs_for_common(self):
init_dict = {
"block_out_channels": [32, 64],
"in_channels": 3,
"out_channels": 3,
"down_block_types": ["DownEncoderBlock2D", "DownEncoderBlock2D"],
"up_block_types": ["UpDecoderBlock2D", "UpDecoderBlock2D"],
"latent_channels": 4,
}
inputs_dict = self.dummy_input
return init_dict, inputs_dict
| diffusers/tests/models/autoencoders/test_models_vae_flax.py/0 | {
"file_path": "diffusers/tests/models/autoencoders/test_models_vae_flax.py",
"repo_id": "diffusers",
"token_count": 513
} | 128 |
# coding=utf-8
# Copyright 2023 HuggingFace Inc.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import copy
import unittest
import torch
from diffusers import UNetSpatioTemporalConditionModel
from diffusers.utils import logging
from diffusers.utils.import_utils import is_xformers_available
from diffusers.utils.testing_utils import (
enable_full_determinism,
floats_tensor,
torch_all_close,
torch_device,
)
from ..test_modeling_common import ModelTesterMixin, UNetTesterMixin
logger = logging.get_logger(__name__)
enable_full_determinism()
class UNetSpatioTemporalConditionModelTests(ModelTesterMixin, UNetTesterMixin, unittest.TestCase):
model_class = UNetSpatioTemporalConditionModel
main_input_name = "sample"
@property
def dummy_input(self):
batch_size = 2
num_frames = 2
num_channels = 4
sizes = (32, 32)
noise = floats_tensor((batch_size, num_frames, num_channels) + sizes).to(torch_device)
time_step = torch.tensor([10]).to(torch_device)
encoder_hidden_states = floats_tensor((batch_size, 1, 32)).to(torch_device)
return {
"sample": noise,
"timestep": time_step,
"encoder_hidden_states": encoder_hidden_states,
"added_time_ids": self._get_add_time_ids(),
}
@property
def input_shape(self):
return (2, 2, 4, 32, 32)
@property
def output_shape(self):
return (4, 32, 32)
@property
def fps(self):
return 6
@property
def motion_bucket_id(self):
return 127
@property
def noise_aug_strength(self):
return 0.02
@property
def addition_time_embed_dim(self):
return 32
def prepare_init_args_and_inputs_for_common(self):
init_dict = {
"block_out_channels": (32, 64),
"down_block_types": (
"CrossAttnDownBlockSpatioTemporal",
"DownBlockSpatioTemporal",
),
"up_block_types": (
"UpBlockSpatioTemporal",
"CrossAttnUpBlockSpatioTemporal",
),
"cross_attention_dim": 32,
"num_attention_heads": 8,
"out_channels": 4,
"in_channels": 4,
"layers_per_block": 2,
"sample_size": 32,
"projection_class_embeddings_input_dim": self.addition_time_embed_dim * 3,
"addition_time_embed_dim": self.addition_time_embed_dim,
}
inputs_dict = self.dummy_input
return init_dict, inputs_dict
def _get_add_time_ids(self, do_classifier_free_guidance=True):
add_time_ids = [self.fps, self.motion_bucket_id, self.noise_aug_strength]
passed_add_embed_dim = self.addition_time_embed_dim * len(add_time_ids)
expected_add_embed_dim = self.addition_time_embed_dim * 3
if expected_add_embed_dim != passed_add_embed_dim:
raise ValueError(
f"Model expects an added time embedding vector of length {expected_add_embed_dim}, but a vector of {passed_add_embed_dim} was created. The model has an incorrect config. Please check `unet.config.time_embedding_type` and `text_encoder_2.config.projection_dim`."
)
add_time_ids = torch.tensor([add_time_ids], device=torch_device)
add_time_ids = add_time_ids.repeat(1, 1)
if do_classifier_free_guidance:
add_time_ids = torch.cat([add_time_ids, add_time_ids])
return add_time_ids
@unittest.skip("Number of Norm Groups is not configurable")
def test_forward_with_norm_groups(self):
pass
@unittest.skip("Deprecated functionality")
def test_model_attention_slicing(self):
pass
@unittest.skip("Not supported")
def test_model_with_use_linear_projection(self):
pass
@unittest.skip("Not supported")
def test_model_with_simple_projection(self):
pass
@unittest.skip("Not supported")
def test_model_with_class_embeddings_concat(self):
pass
@unittest.skipIf(
torch_device != "cuda" or not is_xformers_available(),
reason="XFormers attention is only available with CUDA and `xformers` installed",
)
def test_xformers_enable_works(self):
init_dict, inputs_dict = self.prepare_init_args_and_inputs_for_common()
model = self.model_class(**init_dict)
model.enable_xformers_memory_efficient_attention()
assert (
model.mid_block.attentions[0].transformer_blocks[0].attn1.processor.__class__.__name__
== "XFormersAttnProcessor"
), "xformers is not enabled"
@unittest.skipIf(torch_device == "mps", "Gradient checkpointing skipped on MPS")
def test_gradient_checkpointing(self):
# enable deterministic behavior for gradient checkpointing
init_dict, inputs_dict = self.prepare_init_args_and_inputs_for_common()
model = self.model_class(**init_dict)
model.to(torch_device)
assert not model.is_gradient_checkpointing and model.training
out = model(**inputs_dict).sample
# run the backwards pass on the model. For backwards pass, for simplicity purpose,
# we won't calculate the loss and rather backprop on out.sum()
model.zero_grad()
labels = torch.randn_like(out)
loss = (out - labels).mean()
loss.backward()
# re-instantiate the model now enabling gradient checkpointing
model_2 = self.model_class(**init_dict)
# clone model
model_2.load_state_dict(model.state_dict())
model_2.to(torch_device)
model_2.enable_gradient_checkpointing()
assert model_2.is_gradient_checkpointing and model_2.training
out_2 = model_2(**inputs_dict).sample
# run the backwards pass on the model. For backwards pass, for simplicity purpose,
# we won't calculate the loss and rather backprop on out.sum()
model_2.zero_grad()
loss_2 = (out_2 - labels).mean()
loss_2.backward()
# compare the output and parameters gradients
self.assertTrue((loss - loss_2).abs() < 1e-5)
named_params = dict(model.named_parameters())
named_params_2 = dict(model_2.named_parameters())
for name, param in named_params.items():
self.assertTrue(torch_all_close(param.grad.data, named_params_2[name].grad.data, atol=5e-5))
def test_model_with_num_attention_heads_tuple(self):
init_dict, inputs_dict = self.prepare_init_args_and_inputs_for_common()
init_dict["num_attention_heads"] = (8, 16)
model = self.model_class(**init_dict)
model.to(torch_device)
model.eval()
with torch.no_grad():
output = model(**inputs_dict)
if isinstance(output, dict):
output = output.sample
self.assertIsNotNone(output)
expected_shape = inputs_dict["sample"].shape
self.assertEqual(output.shape, expected_shape, "Input and output shapes do not match")
def test_model_with_cross_attention_dim_tuple(self):
init_dict, inputs_dict = self.prepare_init_args_and_inputs_for_common()
init_dict["cross_attention_dim"] = (32, 32)
model = self.model_class(**init_dict)
model.to(torch_device)
model.eval()
with torch.no_grad():
output = model(**inputs_dict)
if isinstance(output, dict):
output = output.sample
self.assertIsNotNone(output)
expected_shape = inputs_dict["sample"].shape
self.assertEqual(output.shape, expected_shape, "Input and output shapes do not match")
def test_gradient_checkpointing_is_applied(self):
init_dict, inputs_dict = self.prepare_init_args_and_inputs_for_common()
init_dict["num_attention_heads"] = (8, 16)
model_class_copy = copy.copy(self.model_class)
modules_with_gc_enabled = {}
# now monkey patch the following function:
# def _set_gradient_checkpointing(self, module, value=False):
# if hasattr(module, "gradient_checkpointing"):
# module.gradient_checkpointing = value
def _set_gradient_checkpointing_new(self, module, value=False):
if hasattr(module, "gradient_checkpointing"):
module.gradient_checkpointing = value
modules_with_gc_enabled[module.__class__.__name__] = True
model_class_copy._set_gradient_checkpointing = _set_gradient_checkpointing_new
model = model_class_copy(**init_dict)
model.enable_gradient_checkpointing()
EXPECTED_SET = {
"TransformerSpatioTemporalModel",
"CrossAttnDownBlockSpatioTemporal",
"DownBlockSpatioTemporal",
"UpBlockSpatioTemporal",
"CrossAttnUpBlockSpatioTemporal",
"UNetMidBlockSpatioTemporal",
}
assert set(modules_with_gc_enabled.keys()) == EXPECTED_SET
assert all(modules_with_gc_enabled.values()), "All modules should be enabled"
def test_pickle(self):
# enable deterministic behavior for gradient checkpointing
init_dict, inputs_dict = self.prepare_init_args_and_inputs_for_common()
init_dict["num_attention_heads"] = (8, 16)
model = self.model_class(**init_dict)
model.to(torch_device)
with torch.no_grad():
sample = model(**inputs_dict).sample
sample_copy = copy.copy(sample)
assert (sample - sample_copy).abs().max() < 1e-4
| diffusers/tests/models/unets/test_models_unet_spatiotemporal.py/0 | {
"file_path": "diffusers/tests/models/unets/test_models_unet_spatiotemporal.py",
"repo_id": "diffusers",
"token_count": 4295
} | 129 |
# coding=utf-8
# Copyright 2023 HuggingFace Inc.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import unittest
import numpy as np
import torch
from transformers import CLIPTextConfig, CLIPTextModelWithProjection, CLIPTokenizer
from diffusers import AmusedImg2ImgPipeline, AmusedScheduler, UVit2DModel, VQModel
from diffusers.utils import load_image
from diffusers.utils.testing_utils import enable_full_determinism, require_torch_gpu, slow, torch_device
from ..pipeline_params import TEXT_GUIDED_IMAGE_VARIATION_BATCH_PARAMS, TEXT_GUIDED_IMAGE_VARIATION_PARAMS
from ..test_pipelines_common import PipelineTesterMixin
enable_full_determinism()
class AmusedImg2ImgPipelineFastTests(PipelineTesterMixin, unittest.TestCase):
pipeline_class = AmusedImg2ImgPipeline
params = TEXT_GUIDED_IMAGE_VARIATION_PARAMS - {"height", "width", "latents"}
batch_params = TEXT_GUIDED_IMAGE_VARIATION_BATCH_PARAMS
required_optional_params = PipelineTesterMixin.required_optional_params - {
"latents",
}
def get_dummy_components(self):
torch.manual_seed(0)
transformer = UVit2DModel(
hidden_size=32,
use_bias=False,
hidden_dropout=0.0,
cond_embed_dim=32,
micro_cond_encode_dim=2,
micro_cond_embed_dim=10,
encoder_hidden_size=32,
vocab_size=32,
codebook_size=32,
in_channels=32,
block_out_channels=32,
num_res_blocks=1,
downsample=True,
upsample=True,
block_num_heads=1,
num_hidden_layers=1,
num_attention_heads=1,
attention_dropout=0.0,
intermediate_size=32,
layer_norm_eps=1e-06,
ln_elementwise_affine=True,
)
scheduler = AmusedScheduler(mask_token_id=31)
torch.manual_seed(0)
vqvae = VQModel(
act_fn="silu",
block_out_channels=[32],
down_block_types=[
"DownEncoderBlock2D",
],
in_channels=3,
latent_channels=32,
layers_per_block=2,
norm_num_groups=32,
num_vq_embeddings=32,
out_channels=3,
sample_size=32,
up_block_types=[
"UpDecoderBlock2D",
],
mid_block_add_attention=False,
lookup_from_codebook=True,
)
torch.manual_seed(0)
text_encoder_config = CLIPTextConfig(
bos_token_id=0,
eos_token_id=2,
hidden_size=32,
intermediate_size=64,
layer_norm_eps=1e-05,
num_attention_heads=8,
num_hidden_layers=3,
pad_token_id=1,
vocab_size=1000,
projection_dim=32,
)
text_encoder = CLIPTextModelWithProjection(text_encoder_config)
tokenizer = CLIPTokenizer.from_pretrained("hf-internal-testing/tiny-random-clip")
components = {
"transformer": transformer,
"scheduler": scheduler,
"vqvae": vqvae,
"text_encoder": text_encoder,
"tokenizer": tokenizer,
}
return components
def get_dummy_inputs(self, device, seed=0):
if str(device).startswith("mps"):
generator = torch.manual_seed(seed)
else:
generator = torch.Generator(device=device).manual_seed(seed)
image = torch.full((1, 3, 4, 4), 1.0, dtype=torch.float32, device=device)
inputs = {
"prompt": "A painting of a squirrel eating a burger",
"generator": generator,
"num_inference_steps": 2,
"output_type": "np",
"image": image,
}
return inputs
def test_inference_batch_consistent(self, batch_sizes=[2]):
self._test_inference_batch_consistent(batch_sizes=batch_sizes, batch_generator=False)
@unittest.skip("aMUSEd does not support lists of generators")
def test_inference_batch_single_identical(self):
...
@slow
@require_torch_gpu
class AmusedImg2ImgPipelineSlowTests(unittest.TestCase):
def test_amused_256(self):
pipe = AmusedImg2ImgPipeline.from_pretrained("amused/amused-256")
pipe.to(torch_device)
image = (
load_image("https://huggingface.co/datasets/diffusers/docs-images/resolve/main/open_muse/mountains.jpg")
.resize((256, 256))
.convert("RGB")
)
image = pipe(
"winter mountains",
image,
generator=torch.Generator().manual_seed(0),
num_inference_steps=2,
output_type="np",
).images
image_slice = image[0, -3:, -3:, -1].flatten()
assert image.shape == (1, 256, 256, 3)
expected_slice = np.array([0.9993, 1.0, 0.9996, 1.0, 0.9995, 0.9925, 0.9990, 0.9954, 1.0])
assert np.abs(image_slice - expected_slice).max() < 1e-2
def test_amused_256_fp16(self):
pipe = AmusedImg2ImgPipeline.from_pretrained("amused/amused-256", torch_dtype=torch.float16, variant="fp16")
pipe.to(torch_device)
image = (
load_image("https://huggingface.co/datasets/diffusers/docs-images/resolve/main/open_muse/mountains.jpg")
.resize((256, 256))
.convert("RGB")
)
image = pipe(
"winter mountains",
image,
generator=torch.Generator().manual_seed(0),
num_inference_steps=2,
output_type="np",
).images
image_slice = image[0, -3:, -3:, -1].flatten()
assert image.shape == (1, 256, 256, 3)
expected_slice = np.array([0.9980, 0.9980, 0.9940, 0.9944, 0.9960, 0.9908, 1.0, 1.0, 0.9986])
assert np.abs(image_slice - expected_slice).max() < 1e-2
def test_amused_512(self):
pipe = AmusedImg2ImgPipeline.from_pretrained("amused/amused-512")
pipe.to(torch_device)
image = (
load_image("https://huggingface.co/datasets/diffusers/docs-images/resolve/main/open_muse/mountains.jpg")
.resize((512, 512))
.convert("RGB")
)
image = pipe(
"winter mountains",
image,
generator=torch.Generator().manual_seed(0),
num_inference_steps=2,
output_type="np",
).images
image_slice = image[0, -3:, -3:, -1].flatten()
assert image.shape == (1, 512, 512, 3)
expected_slice = np.array([0.1344, 0.0985, 0.0, 0.1194, 0.1809, 0.0765, 0.0854, 0.1371, 0.0933])
assert np.abs(image_slice - expected_slice).max() < 0.1
def test_amused_512_fp16(self):
pipe = AmusedImg2ImgPipeline.from_pretrained("amused/amused-512", variant="fp16", torch_dtype=torch.float16)
pipe.to(torch_device)
image = (
load_image("https://huggingface.co/datasets/diffusers/docs-images/resolve/main/open_muse/mountains.jpg")
.resize((512, 512))
.convert("RGB")
)
image = pipe(
"winter mountains",
image,
generator=torch.Generator().manual_seed(0),
num_inference_steps=2,
output_type="np",
).images
image_slice = image[0, -3:, -3:, -1].flatten()
assert image.shape == (1, 512, 512, 3)
expected_slice = np.array([0.1536, 0.1767, 0.0227, 0.1079, 0.2400, 0.1427, 0.1511, 0.1564, 0.1542])
assert np.abs(image_slice - expected_slice).max() < 0.1
| diffusers/tests/pipelines/amused/test_amused_img2img.py/0 | {
"file_path": "diffusers/tests/pipelines/amused/test_amused_img2img.py",
"repo_id": "diffusers",
"token_count": 3983
} | 130 |
Subsets and Splits
No community queries yet
The top public SQL queries from the community will appear here once available.