
licenses
listlengths 1
3
| version
stringclasses 677
values | tree_hash
stringlengths 40
40
| path
stringclasses 1
value | type
stringclasses 2
values | size
stringlengths 2
8
| text
stringlengths 25
67.1M
| package_name
stringlengths 2
41
| repo
stringlengths 33
86
|
|---|---|---|---|---|---|---|---|---|
[
"MIT"
]
| 0.3.0 | 215ea07f170cd9732aa7d7745c672f69baf3dc02 | code | 2751 | using Dierckx
import TimeseriesTools: TimeSeries
export getrunningspeed, smoothrunningspeed, getstimuli, stimulustrace
export gettrials, getlicks, getrewards, geteyetracking, getrunningspeed, getbehavior,
getpupilarea
_getrunningspeed(S::AbstractSession) = S.pyObject.running_speed |> py2df
geteyetracking(S::AbstractSession) = S.pyObject.eye_tracking |> py2df
function getrunningspeed(S::AbstractSession)
(df = _getrunningspeed(S); TimeSeries(df.timestamps, df.speed))
end # ? Units
function getpupilarea(S::AbstractSession)
(df = geteyetracking(S); TimeSeries(df.timestamps, df.pupil_area))
end
# function getrunningspeed(S::AbstractSession)
# f = h5open(getfile(S), "r")
# r = f["processing"]["running"]["running_speed"]["data"] |> read
# ts = f["processing"]["running"]["running_speed"]["timestamps"] |> read
# return ToolsArray(r, (𝑡(ts),); metadata=Dict(:sessionid=>getid(S)))
# end
function smoothrunningspeed(S::AbstractSession; windowfunc = hanning, window = 1)
r = getrunningspeed(S)
ts = r.dims[1]
dt = mean(diff(collect(r.dims[1])))
n = ceil(Int, window / dt / 2) * 2
w = windowfunc(n)
w = w ./ sum(w) # Normalized wavelet. Outputs after convolution become averages
x = DSP.conv(r, w)
x = x[(n ÷ 2):(end - n ÷ 2)]
return ToolsArray(x, (𝑡(collect(ts)),), metadata = r.metadata)
end
smoothrunningspeed(s::Integer; kwargs...) = smoothrunningspeed(Session(s); kwargs...)
function stimulustrace(S::AbstractSession, feature, times)
times = Interval(extrema(times)...)
df = getstimuli(S, times)
s = df[:, feature]
x = zeros(length(s))
x[s .== "null"] .= NaN
idxs = s .!= "null"
x[idxs] .= Meta.parse.(s[idxs])
t = mean.(zip(df.start_time, df.stop_time))
return ToolsArray(x, (𝑡(t),))
end
function stimulustrace(S::AbstractSession, feature, times::AbstractRange)
s = stimulustrace(S, feature, extrema(times))
interpmatch(s, times)
end
function stimulustrace(S::AbstractSession, feature, x::LFPVector)
t = dims(x, Ti)
stimulustrace(S, feature, t)
end
function interpmatch(x::LFPVector, ts::AbstractRange)
f = Spline1D(collect(dims(x, Ti)), x)
x̂ = f(ts)
return ToolsArray(x̂, (𝑡(ts),); metadata = x.metadata)
end
"""
Match the time indices of the first input DimVector to the second by interpolating the first
"""
function interpmatch(x::LFPVector, y::LFPVector)
ts = dims(y, Ti).val.data
interpmatch(x, ts)
end
# function interpcorr(x::LFPVector, y::LFPVector)
# x = interpmatch(x, y)
# r = corspearman(x, y)
# end
# Consistent behaviour api
function gettrials end
function getlicks end
function getrewards end
function geteyetracking end
function getrunningspeed end
function getbehavior end
| AllenNeuropixelsBase | https://github.com/brendanjohnharris/AllenNeuropixelsBase.jl.git |
|
[
"MIT"
]
| 0.3.0 | 215ea07f170cd9732aa7d7745c672f69baf3dc02 | code | 5672 | using IntervalSets
export brainobservatorycache, getophysexperiments, getspatialgrating, getdriftinggrating,
getnaturalmovie, getnaturalstimulusframes, getdriftinggratingframes,
getnaturalmovieframes, getstaticgratingframes, getstimulusframes
function brainobservatorycache(manifest_file = brainobservatorymanifest)
brain_observatory_cache.BrainObservatoryCache(manifest_file = manifest_file)
end
function getophysexperiments(; kwargs...)
brainobservatorycache().get_ophys_experiments(; kwargs...)
end
function getspatialgrating(; height = 100, aspect_ratio = 2, ori = 45,
pix_per_cycle = 1 / 0.04, phase = 0, p2p_amp = 0.8,
baseline = p2p_amp / 2)
if any([ori, pix_per_cycle, phase, p2p_amp, baseline] .== ["null"]) # They showed blank (gray) gratings
f = stimulus_info.get_spatial_grating(; height, aspect_ratio, ori = 45,
pix_per_cycle = height, phase = 0,
p2p_amp = 0.8, baseline = 0)
f .= 0.4 # A gray color, mean of sine between 0 and 0.8
end
stimulus_info.get_spatial_grating(; height, aspect_ratio, ori, pix_per_cycle, phase,
p2p_amp, baseline)
end
function getdriftinggrating(t::Real; temporal_frequency = 2, kwargs...)
d = kwargs |> Dict{Symbol, Any}
d[:phase] = pop!(d, :phase, 0) + (t * temporal_frequency) % 1 # ! This is how they do it in the allensdk
getspatialgrating(; d...)
end
function getnaturalmovie(stimulus)
boc = getophysexperiments(stimuli = [stimulus])[1] # Just need one of these sessions to get the template
ds = brainobservatorycache().get_ophys_experiment_data(boc["id"])
template = ds.get_stimulus_template(stimulus)
end
function getnaturalstimulusframes(session, times)
df = getstimuli(session, times)
movies = unique(df.stimulus_name)
@assert all(.∈(movies,
(["natural_movie_one", "natural_movie_three", "natural_scenes"],)))
movieframes = [getnaturalmovie(movie) for movie in movies]
frames = Vector{Matrix{Float32}}(undef, length(times))
for t in 1:length(times)
movieidx = indexin([df.stimulus_name[t]], movies)[1]
frame = Int(Meta.parse(df.frame[t]) + 1) # Goddamn python frames start at 0
if frame < 1
frames[t] = fill(1.0, size(frames[t - 1]))
else
frames[t] = movieframes[movieidx][frame, :, :] ./ 256
end
end
return ToolsArray(frames, (𝑡(times)))
end
getnaturalmovieframes = getnaturalstimulusframes
function getdriftinggratingframes(session, times)
df = getstimuli(session, times)
height = 100
aspect_ratio = 2
frames = [Matrix{Float32}(undef, height, aspect_ratio * height)
for t in 1:length(times)]
for t in 1:lastindex(times)
if any((df.temporal_frequency[t], df.orientation[t], df.contrast) .== ["null"])
frames[t] .= 0.4
else
frames[t] = getdriftinggrating(times[t] - df.start_time[t];
temporal_frequency = df.temporal_frequency[t] |>
Meta.parse,
height,
aspect_ratio,
ori = df.orientation[t] |> Meta.parse,
pix_per_cycle = 1 /
Meta.parse(df.spatial_frequency[t]),
p2p_amp = df.contrast[t] |> Meta.parse)
end
end
return ToolsArray(frames, (𝑡(times)))
end
function getstaticgratingframes(session, times, spontaneous = false)
df = getstimuli(session, times)
height = 100
aspect_ratio = 2
frames = [Matrix{Float32}(undef, height, aspect_ratio * height)
for t in 1:length(times)]
for t in 1:lastindex(times)
if any((df.orientation[t], df.contrast) .== ["null"]) || spontaneous
frames[t] .= 0.4
else
frames[t] = getspatialgrating(;
height,
aspect_ratio,
ori = df.orientation[t] |> Meta.parse,
pix_per_cycle = 1 /
Meta.parse(df.spatial_frequency[t]),
p2p_amp = df.contrast[t] |> Meta.parse)
end
end
return ToolsArray(frames, (𝑡(times)))
end
function _getstimulusframes(session, times, stimulus)
if stimulus ∈ ["static_gratings", "spontaneous"] # Spontaneous is just a mean-luminance blank screen]
getstaticgratingframes(session, times, stimulus == "spontaneous")
elseif stimulus == "drifting_gratings"
getdriftinggratingframes(session, times)
elseif stimulus ∈ ["natural_movie_one", "natural_movie_three", "natural_scenes"]
getnaturalstimulusframes(session, times)
end
end
function getstimulusframes(session, times)
epochs = getepochs(session)
epochs = epochs[[any(times .∈ x.start_time .. x.stop_time) for x in eachrow(epochs)], :] # Get epochs that contain the times
epochtimes = [[t for t in times if t ∈ x.start_time .. x.stop_time]
for x in eachrow(epochs)]
frames = [_getstimulusframes(session, epochtimes[x], epochs.stimulus_name[x])
for x in 1:length(epochtimes)]
frames = ToolsArray(vcat(frames...), (𝑡(times)))
end
| AllenNeuropixelsBase | https://github.com/brendanjohnharris/AllenNeuropixelsBase.jl.git |
|
[
"MIT"
]
| 0.3.0 | 215ea07f170cd9732aa7d7745c672f69baf3dc02 | code | 14717 | using IntervalSets
export ecephyscache, behaviorcache, getsessiontable, getprobes, getchannels, listprobes,
getsessiondata, AbstractSession, Session, getid, getprobes, getfile, getprobeids,
getchannels, getprobecoordinates, getstructureacronyms, getstructureids,
getprobestructures, getprobe, getunits, getepochs, getstimuli, getstimulustimes,
getunitmetrics, getunitanalysismetrics, getunitanalysismetricsbysessiontype,
isvalidunit, onlyvalid, getchannelcoordinates, getperformancemetrics
function ecephyscache()
ecephys_project_cache.EcephysProjectCache.from_warehouse(manifest = ecephysmanifest)
end
function __behaviorcache()
cache = behavior_project_cache.VisualBehaviorNeuropixelsProjectCache
if (isdir(behaviormanifest) ||
isfile(behaviormanifest)) && haskey(ENV, "ALLEN_NEUROPIXELS_OFFLINE") &&
ENV["ALLEN_NEUROPIXELS_OFFLINE"] == "true"
cache.from_local_cache(; cache_dir = behaviormanifest) # So we can work offline
else
cache.from_s3_cache(cache_dir = behaviormanifest)
end
end
behaviorcache() = _behaviorcache
"""
# getsessiontable — Read and return the session table from the EcephysProjectCache
`getsessiontable()`
Read the session table data from the `EcephysProjectCache` object returned by `ecephyscache` and returns it as a `DataFrame`.
"""
function getsessiontable()
@info "Please wait, this can take a few seconds"
df = py2df(ecephyscache().get_session_table())
df.ecephys_structure_acronyms = [string.(s) for s in df.ecephys_structure_acronyms]
return df
end
export getsessiontable
getperformancemetrics() = ()
"""
`getprobes()`
Read the probe data from the `EcephysProjectCache` object returned by `ecephyscache()` and return it as a `DataFrame`.
## Returns
A `DataFrame` containing the probe data.
"""
function getprobes()
py2df(ecephyscache().get_probes())
end
export getprobes
function getchannels()
py2df(ecephyscache().get_channels())
end
export getchannels
listprobes(session) = getchannels.((session,), getprobeids(session))
export listprobes
function getsessiondata(session_id::Int; filter_by_validity = true,
amplitude_cutoff_maximum = 0.1, presence_ratio_minimum = 0.9,
isi_violations_maximum = 0.5)
if session_id > 1000000000
behaviorcache().get_ecephys_session(session_id)
else
ecephyscache().get_session_data(session_id; filter_by_validity = filter_by_validity,
amplitude_cutoff_maximum = amplitude_cutoff_maximum,
presence_ratio_minimum = presence_ratio_minimum,
isi_violations_maximum = isi_violations_maximum)
end
end
export getsessiondata
abstract type AbstractSession end
export AbstractSession
struct Session <: AbstractSession
pyObject::Any
end
export Session
function Session(session_id::Int; kwargs...)
if session_id > 1000000000
VisualBehavior.Session(session_id; kwargs...)
else
Session(getsessiondata(session_id; kwargs...))
end
end
Session(; params...) = Session(params[:sessionid]);
getid(S::AbstractSession) = pyconvert(Int, S.pyObject.ecephys_session_id)
_getprobes(S::AbstractSession) = S.pyObject.probes
getprobes(S::AbstractSession) = py2df(_getprobes(S))
function getfile(S::AbstractSession)
datadir * "Ecephys/session_" * string(getid(S)) * "/session_" * string(getid(S)) *
".nwb"
end
getprobeids(S::AbstractSession) = getprobes(S)[!, :id]
function getchannels(df::DataFrame)
if hasproperty(df, :ecephys_structure_acronym)
df.structure_acronym = df.ecephys_structure_acronym
elseif hasproperty(df, :structure_acronym)
df.ecephys_structure_acronym = df.structure_acronym
end
return df
end
function getchannels(df::DataFrame, probeid::Number)
subset(df, :probe_id => ByRow(==(probeid)))
end
function getchannels(df::DataFrame, probeids)
subset(df, :probe_id => ByRow(∈(probeids)))
end
function getchannels(S::AbstractSession)
df = py2df(S.pyObject.channels)
return getchannels(df)
end
function getchannels(S::AbstractSession, probeid)
df = getchannels(S)
getchannels(df, probeid)
end
# function getprobecoordinates(S::AbstractSession)
# c = subset(getchannels(S), :anterior_posterior_ccf_coordinate => ByRow(!ismissing),
# :dorsal_ventral_ccf_coordinate => ByRow(!ismissing),
# :left_right_ccf_coordinate => ByRow(!ismissing))
# x = c[!, :anterior_posterior_ccf_coordinate]
# y = c[!, :dorsal_ventral_ccf_coordinate]
# z = c[!, :left_right_ccf_coordinate]
# return (x, y, z)
# end
function getprobecoordinates(args...)#; only_has_lfp=false)
# if only_has_lfp
# _c = getchannels()
# _c = _c[_c.has_lfp_data.==true, :]
# _c = _c.id
# c = subset(getchannels(args...), :anterior_posterior_ccf_coordinate => ByRow(!ismissing),
# :dorsal_ventral_ccf_coordinate => ByRow(!ismissing),
# :left_right_ccf_coordinate => ByRow(!ismissing),
# :id => ByRow(x -> x ∈ _c))
# else
c = subset(getchannels(args...),
:anterior_posterior_ccf_coordinate => ByRow(!ismissing),
:dorsal_ventral_ccf_coordinate => ByRow(!ismissing),
:left_right_ccf_coordinate => ByRow(!ismissing))
# end
x = c[!, :anterior_posterior_ccf_coordinate]
y = c[!, :dorsal_ventral_ccf_coordinate]
z = c[!, :left_right_ccf_coordinate]
return (x, y, z)
end
function getchannelcoordinates(args...)
c = subset(getchannels(args...),
:anterior_posterior_ccf_coordinate => ByRow(!ismissing),
:dorsal_ventral_ccf_coordinate => ByRow(!ismissing),
:left_right_ccf_coordinate => ByRow(!ismissing))
x = c[!, :anterior_posterior_ccf_coordinate]
y = c[!, :dorsal_ventral_ccf_coordinate]
z = c[!, :left_right_ccf_coordinate]
return Dict(c.id .=> zip(x, y, z))
end
notemptyfirst(x) = length(x) > 0 ? x[1] : missing
# function getstructureacronyms(channelids::Vector{Int})
# channels = getchannels()
# # acronyms = Vector{Any}(undef, size(channelids))
# acronyms = [notemptyfirst(channels[channels.id.==channelids[i], :ecephys_structure_acronym]) for i ∈ 1:length(channelids)]
# return acronyms
# end
function getstructureacronyms(S::AbstractSession, channelids::Vector{Int})
channels = getchannels(S)
acronyms = Vector{Any}(undef, size(channelids))
[acronyms[i] = notemptyfirst(channels[channels.id .== channelids[i],
:structure_acronym])
for i in 1:length(channelids)]
return acronyms
end
function getstructureids(channelids::Vector{Int})
channels = getchannels()
acronyms = Vector{Any}(undef, size(channelids))
[acronyms[i] = notemptyfirst(channels[channels.id .== channelids[i],
:ecephys_structure_id])
for i in 1:length(channelids)]
return acronyms
end
function getprobestructures(S::AbstractSession)
df = listprobes(S)
acronyms = [unique(string.(d.structure_acronym)) for d in df]
# acronyms = [a[.!ismissing.(a)] for a in acronyms]
probeids = [unique(d.probe_id) |> first for d in df]
return Dict(probeids .=> acronyms)
end
function getprobestructures(S::AbstractSession, structures::AbstractVector)
D = getprobestructures(S)
filter!(d -> any(structures .∈ (last(d),)), D)
D = Dict(k => first(v[v .∈ [structures]]) for (k, v) in D)
end
function getprobe(S::AbstractSession, structure::AbstractString)
D = getprobestructures(S, [structure])
return first(keys(D))
end
function getprobes(S, structures::Vector)
getprobe.((S,), structures)
end
getprobes(S, structure::String) = getprobe(S, structures)
function getunits(; filter_by_validity = true, amplitude_cutoff_maximum = 0.1,
presence_ratio_minimum = 0.9, isi_violations_maximum = 0.5)
str = ecephyscache().get_units(filter_by_validity = filter_by_validity,
amplitude_cutoff_maximum = amplitude_cutoff_maximum,
presence_ratio_minimum = presence_ratio_minimum,
isi_violations_maximum = isi_violations_maximum)
py2df(str)
end
export getunits
function getunits(structure::String; kwargs...)
units = getunits(; kwargs...)
units = subset(units, :structure_acronym, structure)
end
function getsessionunits(session::AbstractSession) # Much faster than the option below
units = pyObject(session.pyObject.units.to_dataframe())
units.structure_acronym = units.ecephys_structure_acronym
end
function getsessionunits(session::AbstractSession, structure::String)
subset(getsessionunits(session), :structure_acronym, structure)
end
function getunits(session::AbstractSession; kwargs...)
units = getunits(; kwargs...)
units = subset(units, :ecephys_session_id, getid(session))
end
function getunits(session::AbstractSession, structure::String)
subset(getunits(session), :structure_acronym, structure)
end
function getunitanalysismetricsbysessiontype(session_type; filter_by_validity = true,
amplitude_cutoff_maximum = 0.1,
presence_ratio_minimum = 0.9,
isi_violations_maximum = 0.5) # Yeah thats python
str = ecephyscache().get_unit_analysis_metrics_by_session_type(session_type,
filter_by_validity = filter_by_validity,
amplitude_cutoff_maximum = amplitude_cutoff_maximum,
presence_ratio_minimum = presence_ratio_minimum,
isi_violations_maximum = isi_violations_maximum)
py2df(str)
end
export getunitanalysismetricsbysessiontype
function getallunitmetrics() # This one is really slow
metrics1 = get_unit_analysis_metrics_by_session_type("brain_observatory_1.1",
amplitude_cutoff_maximum = Inf,
presence_ratio_minimum = -Inf,
isi_violations_maximum = Inf)
metrics2 = get_unit_analysis_metrics_by_session_type("functional_connectivity",
amplitude_cutoff_maximum = Inf,
presence_ratio_minimum = -Inf,
isi_violations_maximum = Inf)
vcat(analysis_metrics1, analysis_metrics2)
end
export getallunitmetrics
function getunitanalysismetrics(session::AbstractSession; annotate = true,
filter_by_validity = true, kwargs...)
str = ecephyscache().get_unit_analysis_metrics_for_session(getid(session); annotate,
filter_by_validity,
kwargs...)
py2df(str)
end
function isvalidunit(S::AbstractSession, u::AbstractVector)
metrics = getunitanalysismetrics(S)
return u .∈ (metrics.ecephys_unit_id,)
end
function onlyvalid(s::AbstractSession, sp::Dict)
K = keys(sp) |> collect
V = values(sp) |> collect
idxs = isvalidunit(s, (K))
K = K[idxs]
V = V[idxs]
return Dict(k => v for (k, v) in zip(K, V))
end
function getstimuli(S::AbstractSession)
str = S.pyObject.stimulus_presentations
str = py2df(str)
if !hasproperty(str, :stop_time)
str.stop_time = str.end_time
end
return str
end
getstimulus = getstimuli
function getunitmetrics(session::AbstractSession)
str = session.pyObject.units
py2df(str)
end
function getstimulusname(session::AbstractSession, time::Number;
stimulus_table = getstimuli(session))
idx = findlast(stimulus_table.start_time .< time)
if isnothing(idx)
"blank"
else
stimulus_table.stimulus_name[idx]
end
end
function getstimulusname(session::AbstractSession, times;
stimulus_table = getstimuli(session), kwargs...)
getstimulusname.([session], times; stimulus_table, kwargs...)
end
function getstimuli(S::AbstractSession, stimulusname::String)
stimulus_table = getstimuli(S)
df = subset(stimulus_table, :stimulus_name => ByRow(==(stimulusname)))
end
function getstimuli(session::AbstractSession,
times::Union{Tuple, UnitRange, LinRange, Vector})
stimuli = getstimuli(session)
idxs = [findfirst(time .< stimuli.stop_time) for time in times] # Find first frame that ends after each time point
return stimuli[idxs, :]
end
function getstimuli(session::AbstractSession, times::Interval)
stimuli = getstimuli(session)
start = stimuli.start_time
stop = stimuli.stop_time
i1 = min(findfirst(start .> minimum(times)), findfirst(stop .> minimum(times)))
i2 = max(findlast(start .< maximum(times)), findlast(stop .< maximum(times)))
stimuli = stimuli[i1:i2, :]
end
function getepochs(S::Session)
p = S.pyObject.get_stimulus_epochs() # Why is this so slow
py2df(p)
end
function getepochs(S::AbstractSession, stimulusname::Regex)
epoch_table = getepochs(S)
df = subset(epoch_table,
:stimulus_name => ByRow(x -> !isnothing(match(stimulusname, x))))
end
function getepochs(S::AbstractSession, stimulusname)
epoch_table = getepochs(S)
df = subset(epoch_table, :stimulus_name => ByRow(==(stimulusname)))
end
getepochs(S::Int, args...; kwargs...) = getepochs(Session(S), args...; kwargs...)
function getstimulustimes(S::Session, stimulusname)
E = getepochs(S, stimulusname)
ts = [E.start_time E.stop_time]
times = [x .. y for (x, y) in eachrow(ts)]
end
function getstimulustimes(; params...)
S = Session(params[:sessionid])
getstimulustimes(S, params[:stimulus])[params[:epoch]]
end
function getlfppath(session::AbstractSession, probeid)
path = joinpath(datadir, "Ecephys", "session_" * string(getid(session)),
"probe_" * string(probeid) * "_lfp.nwb")
end
# * Stimulus analysis
# ReceptiveFieldMapping(S::AbstractSession) = stimulusmapping.ReceptiveFieldMapping(S.pyObject)
# function getreceptivefield(S::AbstractSession, channel::Number)
# rfm = ReceptiveFieldMapping(S)
# rfm.get_receptive_field(channel)
# end
| AllenNeuropixelsBase | https://github.com/brendanjohnharris/AllenNeuropixelsBase.jl.git |
|
[
"MIT"
]
| 0.3.0 | 215ea07f170cd9732aa7d7745c672f69baf3dc02 | code | 6374 | export HybridSession
using NWBStream
using PythonCall
using NWBStream
using DataFrames
using Downloads
using JSON
import NWBStream.url2df
mutable struct HybridSession <: AbstractNWBSession
url::Any
file::Any
io::Any
pyObject::Any
function HybridSession(url::String, file, io, pyObject = ())
S = new(url, file, io, pyObject)
f(S::HybridSession) = @async s3close(S.io)
finalizer(f, S)
end
end
HybridSession(url::String) = (S = HybridSession(url, s3open(url)...); initialize!(S); S)
function HybridSession(session_id::Int, args...; kwargs...)
HybridSession(VisualBehavior.getsessionfile(session_id), args...; kwargs...)
end
# Calls to getlfp should use the streaming approach if the length is less than some amount, otherwise download the file using the allensdk
function _loadlfp(session::HybridSession, probeid::Int;
channelidxs = 1:length(getlfpchannels(session, probeid)),
timeidxs = 1:length(getlfptimes(session, probeid)))
@assert(any(getprobeids(session) .== probeid),
"Probe $probeid does not belong to session $(getid(session))")
@assert(subset(getprobes(session), :id => ByRow(==(probeid)))[!, :has_lfp_data][1],
@error "Probe $probeid does not have LFP data")
path = getlfppath(session, probeid)
if !isfile(path)
downloadlfp(session, probeid)
end
if !isfile(path)
@error "LFP data did not download correctly"
end
f = h5open(path)
timedata = getlfptimes(session, probeid, timeidxs)
dopermute = true
channelids = getlfpchannels(session, probeid)
channelids = channelids[channelidxs]
if (channelidxs isa Union{Int64, AbstractRange{Int64}}) &
(timeidxs isa Union{Int64, AbstractRange{Int64}}) # Can use HDF5 slicing
lfp = f["acquisition"][splitext(basename(path))[1]][splitext(basename(path))[1] * "_data"]["data"][channelidxs,
timeidxs]
elseif timeidxs isa Union{Int64, AbstractRange{Int64}}
lfp = [f["acquisition"][splitext(basename(path))[1]][splitext(basename(path))[1] * "_data"]["data"][i,
timeidxs]
for i in channelidxs]
lfp = hcat(lfp...)
dopermute = false
else
lfp = read(f["acquisition"][splitext(basename(path))[1]][splitext(basename(path))[1] * "_data"]["data"])
lfp = lfp[channelidxs, timeidxs]
end
if lfp isa Vector
lfp = reshape(lfp, 1, length(lfp))
end
if channelids isa Number
channelids = [channelids]
end
if dopermute
lfp = permutedims(lfp, reverse(1:ndims(lfp)))
end
X = ToolsArray(lfp, (𝑡(timedata), Chan(channelids));
metadata = Dict(:sessionid => getid(session), :probeid => probeid))
close(f)
return X
end
function _streamlfp(session::AbstractNWBSession, probeid::Int;
channelidxs = 1:length(getlfpchannels(session, probeid)),
timeidxs = 1:length(getlfptimes(session, probeid)))
@assert(any(getprobeids(session) .== probeid),
"Probe $probeid does not belong to session $(getid(session))")
_timeidxs = timeidxs .- 1 # Python sucks
_channelidxs = channelidxs .- 1 # Python sucks
f, io = getprobefile(session, probeid) |> NWBStream.s3open
_lfp = Dict(f.acquisition)["probe_1108501239_lfp_data"]
# timedata = getlfptimes(session, probeid)
timedata = getlfptimes(session, probeid)
timedata = timedata[timeidxs]
channelids = getlfpchannels(session, probeid)
channelids = channelids[channelidxs]
lfp = zeros(Float32, length(timedata), length(channelids))
for (i, _channelidx) in enumerate(_channelidxs)
d = diff(_timeidxs)
# if all(d == d[1]) # We can do some efficient slicing
# slc = @py slice(first(_timeidxs), last(_timeidxs), d[1])
# @time @py _lfp.data[slc]
# else
lfp[:, i] .= pyconvert(Vector{Float32}, _lfp.data[_timeidxs, _channelidx])
# end
end
if channelids isa Number
channelids = [channelids]
end
X = ToolsArray(lfp, (𝑡(timedata), Chan(channelids)))
return X
end
# """
# Get the lfp data for a probe, providing *indices* for channels and times. See function below for indexing by channel ids and time values/intervals
# """
# function _getlfp(session::AbstractSession, probeid::Int; channelidxs=1:length(getlfpchannels(session, probeid)), timeidxs=1:length(getlfptimes(session, probeid)))
# @assert(any(getprobeids(session) .== probeid), "Probe $probeid does not belong to session $(getid(session))")
# @assert(subset(getprobes(session), :id=>ByRow(==(probeid)))[!, :has_lfp_data][1], @error "Probe $probeid does not have LFP data")
# path = getlfppath(session, probeid)
# if !isfile(path)
# downloadlfp(session, probeid)
# end
# if !isfile(path)
# @error "LFP data did not download correctly"
# end
# f = h5open(path)
# timedata = getlfptimes(session, probeid, timeidxs)
# dopermute = true
# channelids = getlfpchannels(session, probeid)
# channelids = channelids[channelidxs]
# if (channelidxs isa Union{Int64, AbstractRange{Int64}}) & (timeidxs isa Union{Int64, AbstractRange{Int64}}) # Can use HDF5 slicing
# lfp = f["acquisition"][splitext(basename(path))[1]][splitext(basename(path))[1]*"_data"]["data"][channelidxs, timeidxs]
# elseif timeidxs isa Union{Int64, AbstractRange{Int64}}
# lfp = [f["acquisition"][splitext(basename(path))[1]][splitext(basename(path))[1]*"_data"]["data"][i, timeidxs] for i ∈ channelidxs]
# lfp = hcat(lfp...)
# dopermute = false
# else
# lfp = read(f["acquisition"][splitext(basename(path))[1]][splitext(basename(path))[1]*"_data"]["data"])
# lfp = lfp[channelidxs, timeidxs]
# end
# if lfp isa Vector
# lfp = reshape(lfp, 1, length(lfp))
# end
# if channelids isa Number
# channelids = [channelids]
# end
# if dopermute
# lfp = permutedims(lfp, reverse(1:ndims(lfp)))
# end
# X = ToolsArray(lfp, (𝑡(timedata), Chan(channelids)))
# close(f)
# return X
# end
| AllenNeuropixelsBase | https://github.com/brendanjohnharris/AllenNeuropixelsBase.jl.git |
|
[
"MIT"
]
| 0.3.0 | 215ea07f170cd9732aa7d7745c672f69baf3dc02 | code | 32876 | using IntervalSets
using HDF5
using Statistics
using Downloads
import DataFrames.groupby
export LFPVector, LFPMatrix, PSDMatrix, PSDVector, LogPSDVector, duration, samplingperiod,
getlfp, getlfptimes, getlfpchannels, samplingrate, WaveletMatrix, LogWaveletMatrix,
formatlfp, getchannels, getchanneldepths, waveletmatrix, getunitdepths, getdim,
gettimes, sortbydepth, rectifytime, stimulusepochs, stimulusintervals,
gaborintervals, alignlfp, logwaveletmatrix, matchlfp, joinlfp, catlfp,
channels2depths, selectepochs, getchannellayers, getstreamlines
LFPVector = AbstractToolsArray{T, 1, Tuple{A},
B} where {T, A <: TimeseriesTools.TimeDim, B}
LFPMatrix = AbstractToolsArray{T, 2,
Tuple{A, B}} where {T, A <: TimeseriesTools.TimeDim,
B <: Chan}
export LFPMatrix, LFPVector # For simpler dispatch
function dimmatrix(a::Symbol, b::Symbol)
AbstractToolsArray{T, 2, Tuple{A, B}} where {T, A <: Dim{a}, B <: Dim{b}}
end
function dimmatrix(a, b::Symbol)
AbstractToolsArray{T, 2, Tuple{A, B}} where {T, A <: a, B <: Dim{b}}
end
dimmatrix(a, b) = AbstractToolsArray{T, 2, Tuple{A, B}} where {T, A <: a, B <: b}
export dimmatrix
PSDMatrix = dimmatrix(𝑓, Chan)
PSDVector = AbstractToolsArray{T, 1, Tuple{A}, B} where {T, A <: 𝑓, B}
LogPSDVector = AbstractToolsArray{T, 1, Tuple{A}, B} where {T, A <: Log𝑓, B}
duration(X::AbstractToolsArray) = diff(extrema(dims(X, Ti)) |> collect) |> first
function samplingperiod(X::AbstractToolsArray)
if dims(X, Ti).val.data isa AbstractRange
step(dims(X, Ti))
else
mean(diff(collect(dims(X, Ti))))
end
end
samplingrate(X::AbstractToolsArray) = 1 / samplingperiod(X)
WaveletMatrix = dimmatrix(Ti, 𝑓) # Type for ToolsArrays containing wavelet transform info
LogWaveletMatrix = dimmatrix(Ti, Log𝑓) # Type for ToolsArrays containing wavelet transform info
export WaveletMatrix, LogWaveletMatrix
function Base.convert(::Type{LogWaveletMatrix}, x::WaveletMatrix)
x = ToolsArray(x, (dims(x, Ti), Log𝑓(log10.(dims(x, 𝑓))));
metadata = metadata(x), refdims = refdims(x))
x = x[:, .!isinf.(dims(x, Log𝑓))]
end
function Base.convert(::Type{LogPSDVector}, x::PSDVector)
x = ToolsArray(x, (Log𝑓(log10.(dims(x, 𝑓))),); metadata = metadata(x),
refdims = refdims(x))
x = x[.!isinf.(dims(x, Log𝑓))]
end
function Base.convert(::Type{WaveletMatrix}, x::LogWaveletMatrix)
x = ToolsArray(x, (dims(x, Ti), 𝑓(exp10.(dims(x, Log𝑓))));
metadata = metadata(x), refdims = refdims(x))
end
waveletmatrix(res::LogWaveletMatrix) = convert(WaveletMatrix, res)
logwaveletmatrix(res::WaveletMatrix) = convert(LogWaveletMatrix, res)
logpsdvector(res::PSDVector) = convert(LogPSDVector, res)
function downloadlfp(S::AbstractSession, probeid::Int)
@assert(any(getprobeids(S) .== probeid),
"Probe $probeid does not belong to session $(getid(S))")
@assert(subset(getprobes(S), :id => ByRow(==(probeid)))[!, :has_lfp_data][1],
@error "Probe $probeid does not have LFP data")
_ = S.pyObject.get_lfp(probeid)
return nothing
end
function structure2probe(S::AbstractSession, structure::String)
channels = getchannels(S)
channels = channels[.!ismissing.(channels.structure_acronym), :]
channels = subset(channels, :structure_acronym, structure)
@assert length(unique(channels.probe_id)) == 1
return channels.probe_id |> unique |> first
end
function getlfptimes(session::AbstractSession, probeid)
path = getlfppath(session, probeid)
if !isfile(path)
@error "Probe lfp data file does not exist. This may be becuase you have not downloaded the probe data. Try using `getlfp`"
end
f = h5open(path)
times = f["acquisition"][splitext(basename(path))[1]][splitext(basename(path))[1] * "_data"]["timestamps"][:]
close(f)
return times
end
function getlfptimes(session::AbstractSession, probeid, idxs)
getlfptimes(session, probeid)[idxs]
end
function getlfptimes(session::AbstractSession, probeid::Int, i::Interval)
ts = getlfptimes(session::AbstractSession, probeid::Int)
ts = ts[ts .∈ (i,)]
end
function getlfpchannels(session::AbstractSession, probeid)
if !isfile(getlfppath(session, probeid))
downloadlfp(session, probeid)
end
f = h5open(getlfppath(session, probeid))
channels = f["general"]["extracellular_ephys"]["electrodes"]["id"][:]
close(f)
return channels
end
function getprobeobj(S::AbstractSession, probeid)
probes = S.pyObject.probes |> py2df
probeids = probes.id
thisprobe = findfirst(probeids .== probeid)
probe = probes[thisprobe, :]
end
function resolvenwblfp(S::AbstractSession, probeid)
probe = getprobeobj(S, probeid)
res = "probe_$(probe.id)_lfp"
end
"""
Get the lfp data for a probe, providing *indices* for channels and times. See function below for indexing by channel ids and time values/intervals
"""
function _getlfp(session::AbstractSession, probeid::Int;
channelidxs = 1:length(getlfpchannels(session, probeid)),
timeidxs = 1:length(getlfptimes(session, probeid)))
@assert(any(getprobeids(session) .== probeid),
"Probe $probeid does not belong to session $(getid(session))")
@assert(subset(getprobes(session), :id => ByRow(==(probeid)))[!, :has_lfp_data][1],
@error "Probe $probeid does not have LFP data")
path = getlfppath(session, probeid)
if !isfile(path)
downloadlfp(session, probeid)
end
if !isfile(path)
@error "LFP data did not download correctly"
end
f = h5open(path)
timedata = getlfptimes(session, probeid, timeidxs)
dopermute = true
channelids = getlfpchannels(session, probeid)
channelids = channelids[channelidxs]
res = resolvenwblfp(session, probeid)
if (channelidxs isa Union{Int64, AbstractRange{Int64}}) &
(timeidxs isa Union{Int64, AbstractRange{Int64}}) # Can use HDF5 slicing
lfp = f["acquisition"][res][res * "_data"]["data"][channelidxs, timeidxs]
elseif timeidxs isa Union{Int64, AbstractRange{Int64}}
lfp = [f["acquisition"][res][res * "_data"]["data"][i, timeidxs]
for i in channelidxs]
lfp = hcat(lfp...)
dopermute = false
else
lfp = read(f["acquisition"][res][res * "_data"]["data"])
lfp = lfp[channelidxs, timeidxs]
end
if lfp isa Vector
lfp = reshape(lfp, 1, length(lfp))
end
if channelids isa Number
channelids = [channelids]
end
if dopermute
lfp = permutedims(lfp, reverse(1:ndims(lfp)))
end
X = ToolsArray(lfp, (𝑡(timedata), Chan(channelids));
metadata = Dict(:sessionid => getid(session), :probeid => probeid))
close(f)
X = addchanneldepths(session, X; method = :probe)
X = sortbydepth(session, probeid, X; method = :probe)
return X
end
function isinvalidtime(session::AbstractSession, probeids = getprobeids(session),
times = NaN)
if hasproperty(session.pyObject, :get_invalid_times) &&
isempty(session.pyObject.get_invalid_times()) # No invalid times in this session!
return false
end
intervals = [session.pyObject.get_invalid_times().start_time.values,
session.pyObject.get_invalid_times().stop_time.values]
intervals = [[pyconvert(Float64, intervals[1][i]), pyconvert(Float64, intervals[2][i])]
for i in 0:(length(intervals[1]) - 1)]
tags = session.pyObject.get_invalid_times().tags.values
# tags = vcat([pyconvert(Array{Int64}, i) for i ∈ tags]...)
# badprobes = tags[.!isnothing.(tags)]
badprobes = []
if times isa Interval
isininterval = [any(i .∈ (times,)) for i in intervals]
else
isininterval = [any((times .> i[1]) .& (times .< i[2])) for i in intervals]
end
return any(probeids .∈ (badprobes,)) & any(isininterval)
end
function isinvalidtime(session::AbstractNWBSession, probeids = getprobeids(session),
times = NaN)
return !pyconvert(Bool, getfile(session).invalid_times == @py None)
end
"""
This is the one you should be using. Get lfp data by channel id and time intervals or vector. Also, throw error if you try to access an invalid time interval.
"""
function getlfp(session::AbstractSession, probeid::Int;
channels = getlfpchannels(session, probeid),
times = ClosedInterval(extrema(getlfptimes(session, probeid))...),
inbrain = false)
if isinvalidtime(session, probeid, times)
@error "Requested LFP data contains an invalid time..."
end
if inbrain isa Symbol || inbrain isa Real || inbrain
depths = getchanneldepths(session, probeid, channels; method = :probe)
if inbrain isa Real # A depth cutoff
channels = channels[depths .> inbrain]
elseif inbrain isa Symbol # A mode
else # Just cutoff at the surface
channels = channels[depths .> 0]
end
end
channelidxs = getlfpchannels(session, probeid)
channelidxs = indexin(channels, channelidxs)
channelidxs = filter(!isnothing, channelidxs)
@assert length(channels) == length(channelidxs)
timeidxs = getlfptimes(session, probeid)
if !(times isa Interval) && length(times) == 2
times = ClosedInterval(times...)
end
if times isa Interval
@debug "Getting LFP data for $(length(channelidxs)) channels at $(times) times"
timeidxs = findall(timeidxs .∈ (times,))
if isempty(timeidxs)
@warn "Session $(getid(session)), probe $probeid has no LFP for $(times)"
end
else
timeidxs = indexin(times, timeidxs)
timeidxs = filter(!isnothing, timeidxs)
@assert length(timeidxs) == length(times)
end
# See if we can convert to unitranges for faster HDF5 reading via slicing
if collect(UnitRange(extrema(timeidxs)...)) == timeidxs
timeidxs = UnitRange(extrema(timeidxs)...)
end
if collect(UnitRange(extrema(channelidxs)...)) == channelidxs
channelidxs = UnitRange(extrema(channelidxs)...)
end
@info "Accessing LFP data for session $(getid(session))"
_getlfp(session, probeid; channelidxs, timeidxs)
end
"""
If you want to downsample the LFP data, its quicker to use this function and then perform slicing afterwards (since getlfp() has to check all of the time coordinates you supply, which can be slow).
"""
function getdownsampledlfp(session, probeid; downsample = 100,
timerange = ClosedInterval(extrema(getlfptimes(session, probeid))...),
channels = getlfpchannels(session, probeid))
if !(timerange isa Interval) && length(timerange) == 2
timerange = ClosedInterval(timerange...)
end
timevals = getlfptimes(session, probeid)
tidxs = timevals .∈ (timerange,)
times = findfirst(tidxs):downsample:findlast(tidxs)
_getlfp(session, probeid; timeidxs = times)[:, At(channels)]
end
"""
Now we can overload `getlfp()` to index by structure
"""
function getlfp(session::AbstractSession, probeid::Int,
structures::Union{Vector{<:AbstractString}, AbstractString}; kwargs...)
if structures isa String
structures = [structures]
end
channels = subset(getchannels(session, probeid),
:structure_acronym => ByRow(in(structures)), skipmissing = true)
channels = channels.id ∩ getlfpchannels(session, probeid)
isempty(channels) &&
@error "No matching channels found for structure(s) $structures. Perhaps you have entered the wrong probe id?"
getlfp(session, probeid; channels, kwargs...)
end
function getlfp(S::AbstractSession, structure::AbstractString; kwargs...)
probeid = structure2probe(S, structure)
getlfp(S, probeid, structure; kwargs...)
end
function getlfp(session::AbstractSession, probeids::Vector{Int}, args...; kwargs...)
LFP = [getlfp(session, probeid, args...; kwargs...) for probeid in probeids]
end
function selectepochs(session, stimulus, epoch)
epochs = getepochs(session, stimulus)
isnothing(epoch) && (return epochs)
isempty(epochs) && (@error "No '$stimulus' epoch found in session $(getid(session))")
if !(epoch isa Symbol) && length(epoch) > 1
qualifier = epoch[2]
epoch = epoch[1]
if qualifier isa Symbol
qualifier = qualifier => ByRow(==(true))
end
_epochs = subset(epochs, qualifier)
if !isempty(_epochs)
epochs = _epochs
else
error("Invalid qualifier '$qualifier' for epoch '$epoch' in this session")
end
end
if epoch == :longest
_, epoch = findmax(epochs.duration)
elseif epoch == :first
epoch = 1
elseif epoch == :last
epoch = size(epochs, 1)
end
epoch = epochs[epoch, :] |> DataFrame
end
function formatlfp(session::AbstractSession; probeid = nothing, tol = 6,
stimulus, structure, epoch = :longest, rectify = true, inbrain = 0.0,
kwargs...)
if isnothing(probeid)
probeid = getprobe(session, structure)
end
if isnothing(structure)
structure = getstructureacronyms(session, getchannels(session, probeid).id) |>
unique |> skipmissing |> collect |> Vector{String}
structure = structure[structure .!= ["root"]]
end
if stimulus == "all"
X = getlfp(session, probeid, structure; inbrain)
else
epoch = selectepochs(session, stimulus, epoch)
times = first(epoch.start_time) .. first(epoch.stop_time)
X = getlfp(session, probeid, structure; inbrain, times)
end
if rectify
X = TimeseriesTools.rectify(X; dims = 𝑡, tol)
end
X = addmetadata(X; stimulus, structure)
end
function formatlfp(; sessionid = 757216464, probeid = nothing, kwargs...)
if sessionid < 1000000000
session = Session(sessionid)
else
session = VisualBehavior.Session(sessionid)
end
formatlfp(session; probeid, kwargs...)
end
export formatlfp
function getstreamlines()
streamlines = load(streamlinepath)
streamlines = ToolsArray(streamlines.data,
(Dim{:L}(getproperty(streamlines.axes[1], :val)),
Dim{:P}(getproperty(streamlines.axes[2], :val)),
Dim{:S}(getproperty(streamlines.axes[3], :val))))
return streamlines
end
function getchannellayers(session, X::LFPMatrix, cdf = getchannels(session))
if Dim{:layer} ∈ refdims(X)
return X
end
layers = getchannellayers(session, dims(X, Chan) |> collect, cdf)
addrefdim(X, Dim{:layer}(layers[1]))
end
function getchannellayers(session, channels, cdf = getchannels(session))
channels = collect(channels)
tre = getstructuretree()
mp = getstructureidmap()
function get_layer_name(acronym)
try
if !pyconvert(Bool, tre.structure_descends_from(mp[acronym], mp["Isocortex"]))
return 0
end # * ! Check that the structure is in the isocortex using the structure tree
layer = parse(Int, match(r"\d+", acronym).match)
if layer == 3
layer = 0
end
return layer
catch
return 0
end
end
function get_structure_ids(df, annotations)
x = round.(Int, df.anterior_posterior_ccf_coordinate / 10)
y = round.(Int, df.dorsal_ventral_ccf_coordinate / 10)
z = round.(Int, df.left_right_ccf_coordinate / 10)
x[x .< 0] .= 0
y[y .< 0] .= 0
z[z .< 0] .= 0
structure_ids = [annotations[_x .+ 1, _y .+ 1, _z .+ 1]
for (_x, _y, _z) in zip(x, y, z)] # annotation volume is 1-indexed
return structure_ids .|> Int |> vec
end
df = cdf[indexin(channels, cdf.id), :]
annotations, _ = getannotationvolume(; resolution = 10)
df = df[df.anterior_posterior_ccf_coordinate .> 0, :]
x = floor.(Int, df.anterior_posterior_ccf_coordinate / 10)
y = floor.(Int, df.dorsal_ventral_ccf_coordinate / 10)
z = floor.(Int, df.left_right_ccf_coordinate / 10)
structure_ids = get_structure_ids(df, annotations)
structure_tree = Dict(v => k for (k, v) in getstructureidmap())
structure_acronyms = [s == 0 ? "root" : getindex(structure_tree, s)
for s in structure_ids]
layers = [get_layer_name(acronym) for acronym in structure_acronyms]
structure_acronyms = map(structure_acronyms) do s
if pyconvert(Bool, tre.structure_descends_from(mp[s], mp["Isocortex"]))
while isnothing(tryparse(Float64, string(last(s))))
s = s[1:(end - 1)] # Truncating sublayer numbers
end
end
s
end
return layers, structure_acronyms
end
function getchannels(data::AbstractToolsArray)
dims(data, Chan).val
end
function getchanneldepths(session, d::TimeseriesTools.ToolsDimension; kwargs...)
getchanneldepths(session, d.val.data; kwargs...)
end
function addchanneldepths(session::AbstractSession, X::LFPMatrix; method = :probe,
kwargs...)
if ((Depth ∈ refdims(X)) || any(isa.(refdims(X), [Depth]))) &&
haskey(metadata(X), :depth_method) &&
metadata(X)[:depth_method] === method
@warn "Depth information already present in this LFP matrix, rewriting"
end
depths = getchanneldepths(session, dims(X, Chan); method,
kwargs...)
m = Dict(c => d for (c, d) in zip(dims(X, Chan), depths))
X = addmetadata(X; depths = m)
return addmetadata(X; depthmethod = method)
end
function getchanneldepths(session, probeid, channels; kwargs...)
cdf = getchannels(session, probeid)
return _getchanneldepths(cdf, channels; kwargs...)
end
function getchanneldepths(session, channels::Union{AbstractVector, Tuple}; kwargs...)
_cdf = getchannels(session) # Slightly slower than the above
cdf = _cdf[indexin(channels, _cdf.id), :]
cdfs = groupby(cdf, :probe_id)
probeids = [unique(c.probe_id)[1] for c in cdfs]
depths = vcat([_getchanneldepths(_cdf[_cdf.probe_id .== p, :], c.id; kwargs...)
for (p, c) in zip(probeids, cdfs)]...)
depths = depths[indexin(channels, vcat(cdfs...).id)]
end
function _getchanneldepths(cdf, channels; method = :probe)
# surfaceposition = minimum(subset(cdf, :structure_acronym=>ByRow(ismissing)).probe_vertical_position) # Minimum because tip is at 0
if method === :dorsal_ventral
if any(ismissing.(cdf.structure_acronym))
surfaceposition = maximum(subset(cdf,
:structure_acronym => ByRow(ismissing)).dorsal_ventral_ccf_coordinate)
elseif any(skipmissing(cdf.structure_acronym) .== ["root"]) # For VBN files, "root" rather than "missing"
surfaceposition = maximum(subset(cdf,
:structure_acronym => ByRow(==("root"))).dorsal_ventral_ccf_coordinate)
end
# Assume the first `missing` channel corresponds to the surfaceprobe_vertical_position
idxs = indexin(channels, cdf.id)[:]
# alldepths = surfaceposition .- cdf.probe_vertical_position # in μm
alldepths = cdf.dorsal_ventral_ccf_coordinate .- surfaceposition # in μm
depths = fill(NaN, size(idxs))
depths[.!isnothing.(idxs)] = alldepths[idxs[.!isnothing.(idxs)]]
elseif method === :probe
if any(ismissing.(cdf.structure_acronym))
surfaceposition = minimum(subset(cdf,
:structure_acronym => ByRow(ismissing)).probe_vertical_position)
elseif any(skipmissing(cdf.structure_acronym) .== ["root"]) # For VBN files, "root" rather than "missing"
surfaceposition = minimum(subset(cdf,
:structure_acronym => ByRow(==("root"))).probe_vertical_position)
else
display(unique(cdf.structure_acronym))
error("No missing channels found, cannot identify surface position")
end
# Assume the first `missing` channel corresponds to the surfaceprobe_vertical_position
idxs = indexin(channels, cdf.id)[:]
# alldepths = surfaceposition .- cdf.probe_vertical_position # in μm
alldepths = surfaceposition .- cdf.probe_vertical_position # in μm
depths = fill(NaN, size(idxs))
depths[.!isnothing.(idxs)] = alldepths[idxs[.!isnothing.(idxs)]]
elseif method === :streamlines # This one only really works for the cortex. Anything outside the cortex is a guess based on linear extrapolation.
# Also note that this gives what seems to be a proportion in the cortex
# https://www.dropbox.com/sh/7me5sdmyt5wcxwu/AACB2idSLV-F_QOG894NnZS2a?dl=0&preview=layer_mapping_example.py
# # The code used in the siegle 2021 paper
# Assumes all channels are on the same probe?
streamlines = getstreamlines()
df = cdf[cdf.anterior_posterior_ccf_coordinate .> 0, :]
x = df.anterior_posterior_ccf_coordinate
y = df.dorsal_ventral_ccf_coordinate
z = df.left_right_ccf_coordinate
cortical_depth = [streamlines[Dim{:L}(Near(_x)), Dim{:P}(Near(_y)),
Dim{:S}(Near(_z))] for (_x, _y, _z) in zip(x, y, z)] # 1-based indexing
# Linearly extrapolate the zero depths
_xs = findall(cortical_depth .> 0)
_ys = cortical_depth[_xs]
depthf(x) = first([1 x] * ([ones(length(_xs)) _xs] \ _ys))
cortical_depth[cortical_depth .== 0] .= depthf.(findall(cortical_depth .== 0))
# f = Figure()
# ax = Axis3(f[1, 1]; aspect=:data)
# volume!(ax, dims(streamlines, Dim{:L})[1:100:end] |> collect,
# dims(streamlines, Dim{:P})[1:10:end] |> collect,
# dims(streamlines, Dim{:S})[1:100:end] |> collect,
# streamlines.data[1:100:end, 1:100:end, 1:100:end])
# meshscatter!(ax, x, y, z, markersize=100, color=getchanneldepths(session, channels; method=:dorsal_ventral))
# current_figure()
df.cortical_depth .= 0.0
df[df.anterior_posterior_ccf_coordinate .> 0, :cortical_depth] .= cortical_depth
df = df[indexin(channels, df.id), :]
depths = df.cortical_depth
else
error("`$method` is not a valid method of calculating depths")
end
return depths
end
function getchanneldepths(session, probeid, X::LFPMatrix; kwargs...)
if haskey(metadata(X), :depth) && haskey(metadata(X), :depth_method) &&
metadata(X)[:depth_method] === method
@warn "Depth information already present in this LFP matrix"
D = metadata(X, :depth)
return getindex.([D], dims(X, Chan))
else
channels = dims(X, Chan) |> collect
getchanneldepths(session, probeid, channels; kwargs...)
end
end
function getchanneldepths(S::AbstractSession, X::LFPMatrix; kwargs...)
if haskey(metadata(X), :depth) && haskey(metadata(X), :depth_method) &&
metadata(X)[:depth_method] === method
@warn "Depth information already present in this LFP matrix"
D = metadata(X, :depth)
return getindex.([D], dims(X, Chan))
else
@assert haskey(metadata(X), :probeid)
getchanneldepths(S, metadata(X)[:probeid], X; kwargs...)
end
end
function getchanneldepths(X::LFPMatrix; kwargs...)
if haskey(metadata(X), :depth) && haskey(metadata(X), :depth_method) &&
metadata(X)[:depth_method] === method
@warn "Depth information already present in this LFP matrix"
D = metadata(X, :depth)
return getindex.([D], dims(X, Chan))
else
@assert all(haskey.((metadata(X),), (:sessionid, :probeid)))
@debug "Constructing a session to extract depth info"
S = Session(metadata(X)[:sessionid])
getchanneldepths(S, metadata(X)[:probeid], X; kwargs...)
end
end
function channels2depths(session, probeid::Integer, X::AbstractToolsArray, d::Integer;
kwargs...)
Y = deepcopy(X)
_d = d
c = dims(Y, _d) |> collect
depths = getchanneldepths(session, probeid, c; kwargs...)
Y = set(Y, dims(Y, _d) => Depth(depths))
Y = reorder(Y, dims(Y, _d) => DimensionalData.ForwardOrdered)
return Y
end
function channels2depths(session, probeids::Vector, X::AbstractToolsArray, d; kwargs...)
Y = deepcopy(X)
d = [d...]
for (i, _d) in d
probeid = probeids[i]
c = dims(Y, _d) |> collect
depths = getchanneldepths(session, probeid, c; kwargs...)
Y = set(Y, dims(Y, _d) => Depth(depths))
end
return Y
end
function channels2depths(session, X::AbstractToolsArray; kwargs...)
Y = deepcopy(X)
probeid = X.metadata[:probeid]
c = dims(Y, Chan) |> collect
depths = getchanneldepths(session, probeid, c; kwargs...)
Y = set(Y, dims(Y, Chan) => Depth(depths))
return Y
end
function getunitdepths(session, probeid, units; kwargs...)
metrics = getunitanalysismetrics(session; filter_by_validity = false)
check = units .∈ (metrics.ecephys_unit_id,)
check = all(units .∈ (metrics.ecephys_unit_id,))
if !check
@error "Some units do not have corresponding metrics"
end
metrics = subset(metrics, :ecephys_unit_id, units)
channels = metrics.ecephys_channel_id
getchanneldepths(session, probeid, channels; kwargs...)
end
getdim(X::AbstractToolsArray, dim) = dims(X, dim).val
gettimes(X::AbstractToolsArray) = getdim(X, Ti)
function sortbydepth(session, channels; kwargs...)
depths = getchanneldepths(session, channels; kwargs...)
indices = sortperm(depths)
return channels[indices]
end
function sortbydepth(session, probeid, LFP::AbstractToolsArray; kwargs...)
depths = getchanneldepths(session, LFP; kwargs...)
indices = Array{Any}([1:size(LFP, i) for i in 1:length(size(LFP))])
indices[findfirst(isa.(dims(LFP), Chan))] = sortperm(depths)
return LFP[indices...]
end
function rectifytime(X::AbstractToolsArray; tol = 6, zero = false) # tol gives significant figures for rounding
ts = gettimes(X)
stp = ts |> diff |> mean
err = ts |> diff |> std
if err > stp / 10.0^(-tol)
@warn "Time step is not approximately constant, skipping rectification"
else
stp = round(stp; digits = tol)
t0, t1 = round.(extrema(ts); digits = tol)
if zero
origts = t0:stp:(t1 + (10000 * stp))
t1 = t1 - t0
t0 = 0
end
ts = t0:stp:(t1 + (10000 * stp))
ts = ts[1:size(X, Ti)] # Should be ok?
end
@assert length(ts) == size(X, Ti)
X = set(X, Ti => ts)
if zero
X = rebuild(X; metadata = Dict(:time => origts, pairs(metadata(X))...))
end
return X
end
function stimulusepochs(session, stim)
stimtable = getepochs(session, stim)
stimtable.interval = [a .. b
for (a, b) in zip(stimtable.start_time, stimtable.stop_time)]
return stimtable
end
function stimulusintervals(session, stim)
stimtable = getstimuli(session, stim)
stimtable.interval = [a .. b
for (a, b) in zip(stimtable.start_time, stimtable.stop_time)]
return stimtable
end
function gaborintervals(session)
stimtable = getstimuli(session, "gabors")
stimtable.combined_pos = sqrt.(Meta.parse.(stimtable.x_position) .^ 2 .+
Meta.parse.(stimtable.y_position) .^ 2) # Radial position of the gabor stimulus
stimtable.interval = [a .. b
for (a, b) in zip(stimtable.start_time, stimtable.stop_time)]
return stimtable
end
function radialgaborseries(session, times)
stimtable = getstimuli(session, "gabors")
stimtable.combined_pos = sqrt.(Meta.parse.(stimtable.x_position) .^ 2 .+
Meta.parse.(stimtable.y_position) .^ 2) # Radial position of the gabor stimulus
gaborseries = ToolsArray(zeros(length(times)), (𝑡(times),))
for pos in unique(stimtable.combined_pos)
gabortimes = [a .. b
for (a, b, x) in zip(stimtable.start_time, stimtable.stop_time,
stimtable.combined_pos) if x == pos]
for ts in gabortimes
gaborseries[𝑡(ts)] .= pos
end
end
return gaborseries
end
function alignlfp(session, X, ::Val{:gabors}; x_position = nothing, y_position = nothing)
gaborstim = gaborintervals(session)
X = TimeseriesTools.rectify(X; dims = 𝑡)
isnothing(x_position) ||
(gaborstim = gaborstim[Meta.parse.(gaborstim.x_position) .== x_position, :])
isnothing(y_position) ||
(gaborstim = gaborstim[Meta.parse.(gaborstim.y_position) .== y_position, :])
_X = [X[𝑡(g)] for g in gaborstim.interval]
_X = [x[1:minimum(size.(_X, Ti)), :] for x in _X] # Catch any that are one sample too long
# _X = ToolsArray(mean(collect.(_X)), (𝑡(step(dims(X, Ti)):step(dims(X, Ti)):step(dims(X, Ti))*minimum(size.(_X, Ti))), dims(X, Chan)))
return _X
end
function alignlfp(session, X, ::Val{:static_gratings})
stim = stimulusintervals(session, "static_gratings")
stim = stim[stim.start_time .> minimum(dims(X, Ti)), :]
stim = stim[stim.stop_time .< maximum(dims(X, Ti)), :]
X = TimeseriesTools.rectify(X; dims = 𝑡)
_X = [X[𝑡(g)] for g in stim.interval]
_X = [x[1:minimum(size.(_X, Ti)), :] for x in _X]
return _X
end
"""
For flashes alignment, `trail=false` will return only the data from within the flash period. `trail=onset` will return the data from the onset of the flash to the onset of the flash through to the onset of the next flash. `trail=offset` will return the data from the offset of the flash to the onset of the next flash.
"""
function alignlfp(session, X, ::Val{:flashes}; trail = :offset)
is = stimulusintervals(session, "flashes")
if trail == :onset
onsets = is.start_time
is = [onsets[i] .. onsets[i + 1] for i in 1:(length(onsets) - 1)]
elseif trail == :offset
offsets = is.stop_time
onsets = is.start_time[2:end]
is = [offsets[i] .. onsets[i] for i in 1:(length(offsets) - 1)]
else
is = is.interval
end
X = TimeseriesTools.rectify(X; dims = 𝑡)
_X = [X[𝑡(g)] for g in is]
_X = [x[1:minimum(size.(_X, Ti)), :] for x in _X] # Catch any that are one sample too long
return _X
end
function alignlfp(session, X, ::Val{:flash_250ms}; trail = :offset)
is = stimulusintervals(session, "flash_250ms")
if trail == :onset
onsets = is.start_time
is = [onsets[i] .. onsets[i + 1] for i in 1:(length(onsets) - 1)]
elseif trail == :offset
offsets = is.stop_time
onsets = is.start_time[2:end]
is = [offsets[i] .. onsets[i] for i in 1:(length(offsets) - 1)]
else
is = is.interval
end
X = TimeseriesTools.rectify(X; dims = 𝑡)
_X = [X[𝑡(g)] for g in is]
_X = [x[1:minimum(size.(_X, Ti)), :] for x in _X] # Catch any that are one sample too long
return _X
end
# """
# For spontaneous alignment, we take each whole spontaneous interval as a trial
# """
# function alignlfp(session, X, ::Val{:spontaneous})
# is =stimulusintervals(session, "spontaneous").interval
# X = rectifytime(X)
# _X = [X[𝑡(g)] for g in is]
# return _X
# end
function alignlfp(session, X, stimulus::Union{String, Symbol} = "gabors"; kwargs...)
alignlfp(session, X, stimulus |> Symbol |> Val; kwargs...)
end
"""
Adjust the times of LFP matrix Y so that they match the matrix X
"""
function matchlfp(X, Y)
_ts = Interval(X) ∩ Interval(Y)
ts = dims(X, Ti)
ts = ts[last(findfirst(ts .∈ (_ts,))):last(findlast(ts .∈ (_ts,)))]
Y = Y[𝑡(Near(ts))]
Y = DimensionalData.setdims(Y, ts)
X = X[𝑡(_ts)]
@assert dims(X, Ti) == dims(Y, Ti)
return (X, Y)
end
function intersectlfp(X::AbstractVector)
Y = [TimeseriesTools.rectify(x; dims = 𝑡, tol = 10) for x in X]
ts = dims.(Y, Ti)
ts = [Interval(extrema(t)...) for t in ts]
int = reduce(intersect, ts)
Y = [y[𝑡(int)] for y in Y]
ts = dims.(Y, Ti)
s = step.(ts)
# @assert all(s .== s[1])
length = minimum(size.(Y, 1))
idxs = 1:length
Y = cat([y[idxs, :] for y in Y]..., dims = 2)
end
function catlfp(X::AbstractVector)
Y = [TimeseriesTools.rectify(x; dims = 𝑡, tol = 10) for x in X]
ts = dims.(Y, Ti)
s = step.(ts)
@assert all([dims(Y[1], 2)] .== dims.(Y, (2,)))
@assert all(s .≈ s[1])
s = s[1]
Y = cat(Y..., dims = 𝑡)
set(Y, Ti => 𝑡(s:s:(s * size(Y, 1))))
end
| AllenNeuropixelsBase | https://github.com/brendanjohnharris/AllenNeuropixelsBase.jl.git |
|
[
"MIT"
]
| 0.3.0 | 215ea07f170cd9732aa7d7745c672f69baf3dc02 | code | 1275 | export mouseconnectivitycache, getannotationvolume, getstructuremask, gettemplatevolume,
getreferencespace
function mouseconnectivitycache(; kwargs...)
mcc = mouse_connectivity_cache.MouseConnectivityCache(;
manifest_file = mouseconnectivitymanifest,
kwargs...)
end
export MouseConnectivityCache
function getannotationvolume(; resolution = 10, kwargs...)
# vol, info = mouseconnectivitycache(; resolution, kwargs...).get_annotation_volume()
rspc = referencespacecache(; resolution, kwargs...)
vol, info = rspc.get_annotation_volume()
return pyconvert(Array, vol), Dict(info)
end
function getstructuremask(structureid::Number)
strucutreid = Int(structureid)
mask, info = mouseconnectivitycache().get_structure_mask(structureid)
return pyconvert(Array, mask), Dict(info)
end
function gettemplatevolume()
template, template_info = mouseconnectivitycache().get_template_volume()
return pyconvert(Array, template), Dict(template_info)
end
function getreferencespace()
reference, reference_info = mouseconnectivitycache().get_reference_space()
return pyconvert(Array, reference), Dict(reference_info)
end
| AllenNeuropixelsBase | https://github.com/brendanjohnharris/AllenNeuropixelsBase.jl.git |
|
[
"MIT"
]
| 0.3.0 | 215ea07f170cd9732aa7d7745c672f69baf3dc02 | code | 6288 | using NWBStream
export AbstractNWBSession, NWBSession, S3Session
import DataFrames.groupby
sessionfromnwb(S) = behavior_ecephys_session.BehaviorEcephysSession.from_nwb(S)
abstract type AbstractNWBSession <: AbstractSession end
struct NWBSession <: AbstractNWBSession
file::Any
end
mutable struct S3Session <: AbstractNWBSession
url::Any
file::Any
io::Any
pyObject::Any
function S3Session(url::String, file, io, pyObject = ())
S = new(url, file, io, pyObject)
f(S::S3Session) = @async s3close(S.io)
finalizer(f, S)
end
end
initialize!(S::AbstractNWBSession) = (S.pyObject = sessionfromnwb(S.file); nothing) # Can take absolutely forever since dataframes suck
S3Session(url::String) = (S = S3Session(url, s3open(url)...); initialize!(S); S)
getid(S::AbstractNWBSession) = pyconvert(Int, getfile(S).identifier |> string |> Meta.parse)
# getprobes(S::AbstractNWBSession) = Dict(getfile(S).ec_electrode_groups)
# getprobeids(S::AbstractNWBSession) = Dict(first(s) => pyconvert(Int, last(s).probe_id) for s in getprobes(S))
# getprobefiles(S::AbstractNWBSession) = Dict(getfile(S).ec_electrode_groups)
# getchannels() = manifest["project_metadata"]["channels.csv"] |> url2df
function getfile(S::AbstractNWBSession)
return S.file
end
function getlfpchannels(session::S3Session)
f = getfile(session)
channels = f["general"]["extracellular_ephys"]["electrodes"]["id"][:]
close(f)
return channels
end
# getprobes(S::AbstractNWBSession) = S.pyObject.get_probes_obj().to_dataframe() |> py2df
function getsessionunits(session::AbstractNWBSession)
units = session.pyObject.get_units() |> py2df
end
function py2df(p)
df = p |> PyPandasDataFrame
df = df |> DataFrame
# if hasfield(p, :index)
_index = p.index
index = [pyconvert(Any, i) for i in _index]
if string(p.index.name) == "None"
df[!, "Index"] = index
else
df[!, pyconvert(Any, p.index.name)] = index
end
# Manual conversions
for s in names(df)
if eltype(df[:, s]) <: Union{Missing, AbstractArray{Bool, 0}} # && all(length.(df[:, s]) .< 2)
df[!, s] = [ismissing(i) ? missing : pyconvert(Bool, i[1]) for i in df[:, s]]
end
if eltype(df[:, s]) <: PythonCall.PyArray
df[!, s] = Array.(df[:, s])
end
end
# end
return df[!, [end, (1:(size(df, 2) - 1))...]]
end
# getid(S::AbstractNWBSession) = pyconvert(Int, S.pyObject.behavior_ecephys_session_id)
getprobes(S::AbstractNWBSession) = py2df(S.pyObject.probes)
getchannels(S::AbstractNWBSession) = py2df(S.pyObject.get_channels())
Base.Dict(p::Py) = pyconvert(Dict, p)
function Base.Dict(d::Dict{T, <:PythonCall.PyArray}) where {T}
return Dict(k => pyconvert(Array{eltype(v)}, v) for (k, v) in d)
end
function getprobefile(session::AbstractNWBSession, name::AbstractString)
files = getprobefiles(session)
return files["probe_$(name)_lfp.nwb"]
end
function getprobefile(session::AbstractNWBSession, probeid::Int)
getprobefile(session, first(subset(getprobes(session), :id => ByRow(==(probeid))).name))
end
function getlfpchannels(session::AbstractNWBSession, probeid::Int)
f = getprobefile(session, probeid) |> NWBStream.s3open |> first
_lfp = Dict(f.acquisition)["probe_1108501239_lfp_data"]
channelids = pyconvert(Vector{Int64}, _lfp.electrodes.to_dataframe().index.values)
end
function getlfptimes(session::AbstractNWBSession, probeid::Int)
f = getprobefile(session, probeid) |> NWBStream.s3open |> first
_lfp = Dict(f.acquisition)["probe_1108501239_lfp_data"]
timedata = pyconvert(Vector{Float32}, _lfp.timestamps)
end
function getlfptimes(session::AbstractNWBSession, probeid::Int, idxs)
d = diff(idxs)
if all(d[1] .== d)
idxs = @py slice(idxs[0] - 1, idxs[-1] - 1, d[1])
end
f = getprobefile(session, probeid) |> NWBStream.s3open |> first
_lfp = Dict(f.acquisition)["probe_1108501239_lfp_data"]
timedata = _lfp.timestamps
timedata = pyconvert(Vector{Float32}, timedata[idxs])
end
function getlfptimes(session::AbstractNWBSession, probeid::Int, i::Interval)
f = getprobefile(session, probeid) |> NWBStream.s3open |> first
_lfp = Dict(f.acquisition)["probe_1108501239_lfp_data"]
timedata = _lfp.timestamps
# infer the timestep
dt = mean(diff(pyconvert(Vector, timedata[0:1000])))
putativerange = pyconvert(Float64, timedata[0]):dt:pyconvert(Float64, timedata[-1] + dt)
idxs = findall(putativerange .∈ (i,))
idxs = vcat(idxs[1] .- (100:-1:1), idxs, idxs[end] .+ (1:100))
idxs = idxs[idxs .> 0]
idxs = idxs[idxs .< pyconvert(Int, timedata.len())]
ts = getlfptimes(session::AbstractNWBSession, probeid::Int, idxs)
ts = ts[ts .∈ (i,)]
end
function getepochs(S::AbstractNWBSession)
df = S.pyObject.stimulus_presentations.groupby("stimulus_block").head(1) |> py2df
df.stop_time = df.end_time
return df
end
function _getlfp(session::AbstractNWBSession, probeid::Int;
channelidxs = 1:length(getlfpchannels(session, probeid)),
timeidxs = 1:length(getlfptimes(session, probeid)))
@assert(any(getprobeids(session) .== probeid),
"Probe $probeid does not belong to session $(getid(session))")
_timeidxs = timeidxs .- 1 # Python sucks
_channelidxs = channelidxs .- 1 # Python sucks
f, io = getprobefile(session, probeid) |> NWBStream.s3open
_lfp = Dict(f.acquisition)["probe_1108501239_lfp_data"]
# timedata = getlfptimes(session, probeid)
timedata = getlfptimes(session, probeid)
timedata = timedata[timeidxs]
channelids = getlfpchannels(session, probeid)
channelids = channelids[channelidxs]
lfp = zeros(Float32, length(timedata), length(channelids))
for (i, _channelidx) in enumerate(_channelidxs)
d = diff(_timeidxs)
# if all(d == d[1]) # We can do some efficient slicing
# slc = @py slice(first(_timeidxs), last(_timeidxs), d[1])
# @time @py _lfp.data[slc]
# else
lfp[:, i] .= pyconvert(Vector{Float32}, _lfp.data[_timeidxs, _channelidx])
# end
end
if channelids isa Number
channelids = [channelids]
end
X = ToolsArray(lfp, (𝑡(timedata), Chan(channelids)))
return X
end
| AllenNeuropixelsBase | https://github.com/brendanjohnharris/AllenNeuropixelsBase.jl.git |
|
[
"MIT"
]
| 0.3.0 | 215ea07f170cd9732aa7d7745c672f69baf3dc02 | code | 118 | export getstructuregraph
function getstructuregraphs()
ontologies_api.OntologiesApi().get_structure_graphs()
end
| AllenNeuropixelsBase | https://github.com/brendanjohnharris/AllenNeuropixelsBase.jl.git |
|
[
"MIT"
]
| 0.3.0 | 215ea07f170cd9732aa7d7745c672f69baf3dc02 | code | 3549 | using Colors
using GeometryBasics
import FileIO: load
export referencespacecache, getstructuretree, getstructurecolor, getstructurecolors,
getstructuretreedepth, getstructurename, getstructuremesh, getstructureidmap
function referencespacecache(reference_space_key = "annotation/ccf_2017"; resolution = 25,
manifest = referencespacemanifest)
reference_space_cache.ReferenceSpaceCache(resolution, reference_space_key,
manifest = manifest)
end
function getstructuretree(space = referencespacecache(), id = 1) # Default id is mouse brain atlas
id = Int(id)
space.get_structure_tree(structure_graph_id = id)
end
function getstructurecolor(id::Union{Number, Missing}; tree = getstructuretree())
!ismissing(id) || return RGB(0.0, 0.0, 0.0)
id = Int(id)
d = tree.get_structures_by_id([id])[0]
!isnothing(d) || return RGB(0.0, 0.0, 0.0)
trip = pyconvert(Tuple, d["rgb_triplet"])
c = RGB((trip ./ 256)...)
end
function getstructurecolors(ids::AbstractVector)
tree = getstructuretree()
getstructurecolor.(ids; tree)
end
function getstructuretreedepth(id) # How many parents does this structure have (+1)?
id = Int(id)
tree = getstructuretree()
d = tree.get_structures_by_id([id])[0]
length(d["structure_id_path"])
end
function getstructurename(id::Number)
id = Int(id)
tree = getstructuretree()
d = tree.get_structures_by_id([id])[0]
pyconvert(String, d["name"])
end
function getstructurename(acronym::String)
tree = getstructuretree()
d = tree.get_structures_by_acronym([acronym])[0]
pyconvert(String, d["name"])
end
function getstructureid(acronym::String)
tree = getstructuretree()
d = tree.get_structures_by_acronym([acronym])[0]
pyconvert(Int, d["id"])
end
function getallstructureids(args...)
t = getstructuretree(args...)
d = t.get_name_map()
ids = keys(d)
end
#! Can do the rest of this dict by eval?
function buildreferencespace(tree = getstructuretree(), annotation = getannotationvolume(),
resolution = (25, 25, 25))
if annotation isa Tuple
annotation = annotation[1]
end
rsp = reference_space.ReferenceSpace(tree, annotation, resolution)
end
function buildstructuremask(id, referencespace = buildreferencespace())
referencespace.make_structure_mask([id])
end
function getstructuremeshfile(id, r = referencespacecache())
filename = pyconvert(String,
r.get_cache_path(nothing, r.STRUCTURE_MESH_KEY,
r.reference_space_key, id))
r.api.download_structure_mesh(id, r.reference_space_key, filename, strategy = "lazy")
return filename
end
function getstructureidmap()
t = getstructuretree()
D = t.get_id_acronym_map() |> Dict
end
function getstructuremesh(id, referencespace = referencespacecache(); hemisphere = :both)
m = load(getstructuremeshfile(id, referencespace))
# Only take the right hemisphere, z > midpoint
if hemisphere === :right
idxs = findall(last.(m.position) .> median(last.(m.position)))
elseif hemisphere == :left
idxs = findall(last.(m.position) .< median(last.(m.position)))
else
idxs = 1:length(m.position)
end
fs = faces(m)
checkf(f) = all([(_f.i |> Int) ∈ idxs for _f in f]) # filter out faces that arent in the chosen hemisphere
fs = [f for f in fs if checkf(f)]
m = GeometryBasics.Mesh(coordinates(m), fs)
m
end
| AllenNeuropixelsBase | https://github.com/brendanjohnharris/AllenNeuropixelsBase.jl.git |
|
[
"MIT"
]
| 0.3.0 | 215ea07f170cd9732aa7d7745c672f69baf3dc02 | code | 2691 | using SparseArrays
using DimensionalData
export AbstractSparseToolsArray, SparseToolsArray
import DimensionalData: dims, refdims, data, name, metadata, parent, rebuild
abstract type AbstractSparseToolsArray{T, N, D, A} <: AbstractToolsArray{T, N, D, A} end
struct SparseToolsArray{T, N, D <: Tuple, R <: Tuple, A <: AbstractSparseArray{T, Int64, N},
Na, Me} <: AbstractSparseToolsArray{T, N, D, A}
data::A
dims::D
refdims::R
name::Na
metadata::Me
end
function DimensionalData.format(dims, x::AbstractSparseToolsArray)
DimensionalData.format(dims, axes(x))
end
# DimensionalData.format(::Base.KeySet, ::Type, ::AbstractRange) = DimensionalData.format(DimensionalData.Dimensions.LookupArrays.Aligned, ::Type, ::AbstractRange)
# format(val::AbstractSparseArray, D::Type, axis::AbstractRange) = format(AutoLookup(), D, val, axis)
function SparseToolsArray(data::A, dims::D, refdims::R = (),
name::Na = DimensionalData.NoName(),
metadata = DimensionalData.NoMetadata()) where {D, R, A, Na}
@info "Constructing a sparsedimarray properly"
SparseToolsArray(data, DimensionalData.format(dims, axes(data)), refdims, name,
metadata)
end
function goSparseToolsArray(data::A, dims::D, refdims::R = (),
name::Na = DimensionalData.NoName(),
metadata = DimensionalData.NoMetadata()) where {D, R, A, Na}
@info "Constructing a sparsedimarray properly"
SparseToolsArray(data, DimensionalData.format(dims, axes(data)), refdims, name,
metadata)
end
# function FeatureArray(data::AbstractArray, features::Union{Tuple{Symbol}, Vector{Symbol}}, args...)
# FeatureArray(data, (Dim{:feature}(features), fill(AnonDim(), ndims(data)-1)...), args...)
# end
# FeatureArray(D::ToolsArray) = FeatureArray(D.data, D.dims, D.refdims, D.name, D.metadata)
# # DimensionalData.ToolsArray(D::FeatureArray) = ToolsArray(D.data, D.dims, D.refdims, D.name, D.metadata)
dims(A::AbstractSparseToolsArray) = A.dims
refdims(A::AbstractSparseToolsArray) = A.refdims
data(A::AbstractSparseToolsArray) = A.data
name(A::AbstractSparseToolsArray) = A.name
metadata(A::AbstractSparseToolsArray) = A.metadata
parent(A::AbstractSparseToolsArray) = data(A)
Base.Array(A::AbstractSparseToolsArray) = parent(A)
function DimensionalData.rebuild(A::AbstractSparseToolsArray, data::AbstractSparseArray,
dims::Tuple, refdims::Tuple, name, metadata)
SparseToolsArray(data, dims, refdims, name, metadata)
end
AbstractSparseDimVector = AbstractSparseToolsArray{T, 1, D, A} where {T, D, A}
| AllenNeuropixelsBase | https://github.com/brendanjohnharris/AllenNeuropixelsBase.jl.git |
|
[
"MIT"
]
| 0.3.0 | 215ea07f170cd9732aa7d7745c672f69baf3dc02 | code | 13089 | using SparseArrays
using ProgressLogging
using Random
using IntervalSets
import TimeseriesTools: spiketrain
export downloadspikes, getspiketimes, getspikeamplitudes, formatspiketimes, spikematrix,
getsessionpath, SpikeMatrix, spikematrix, alignspiketimes, countspikes, fanofactor,
defaultfanobins, getspikes, getstructureacronyms, minspikediff, formatspikes,
getisis, receptivefieldfilter, getmetric, getfano, getclosestchannels,
getpeakchannels, getunitchannels, getspiketrains
function downloadspikes(S::AbstractSession)
_ = S.pyObject.spike_times
_ = S.pyObject.spike_amplitudes
return nothing
end
SpikeMatrix = SparseToolsArray{T, 2,
Tuple{A, B}} where {T, A <: TimeseriesTools.TimeDim,
B <: Unit}
export SpikeMatrix
function getsessionpath(session::AbstractSession)
path = joinpath(datadir, "Ecephys", "session_" * string(getid(session)),
"session_" * string(getid(session)) * ".nwb")
end
getspiketimes(S::AbstractSession) = S.pyObject.spike_times |> Dict
getspiketimes(sessionid::Number, args...) = getspiketimes(Session(sessionid), args...)
getspikeamplitudes(S::AbstractSession) = S.pyObject.spike_amplitudes |> Dict
function getspikeamplitudes(sessionid::Number, args...)
getspikeamplitudes(Session(sessionid), args...)
end
function getspiketimes(S::AbstractSession, structure::String)
unitstructs = getunitmetrics(S)
if hasproperty(unitstructs, :structure_acronym)
structures = unitstructs.structure_acronym
else
structures = getstructureacronyms(S, unitstructs.ecephys_channel_id)
end
if hasproperty(unitstructs, :ecephys_unit_id)
unitids = unitstructs[structures .== structure, :].ecephys_unit_id
else
unitids = unitstructs[structures .== structure, :].unit_id
end
spiketimes = filter(p -> p[1] in unitids, getspiketimes(S)) |> Dict
end
function getspiketimes(S::AbstractSession, unitids::Vector{Int})
spiketimes = getspiketimes(S)
Dict(a => b for (a, b) in spiketimes if a in unitids)
end
function getspiketrains(args...; kwargs...)
sp = getspiketimes(args...; kwargs...)
sp = Dict(k => spiketrain(v; metadata = Dict(:unit_id => k)) for (k, v) in sp)
end
function formatspiketimes(; sessionid = 757216464, structure = "VISp", stimulus = "gabors",
epoch = :longest, filter = true, kwargs...)
S = Session(sessionid)
spiketimes = getspiketimes(S, structure)
Is = stimulusepochs(S, stimulus).interval
if epoch === :longest
_, epoch = findmax(IntervalSets.width, Is)
end
I = Is[epoch]
ks = keys(spiketimes)
vals = values(spiketimes)
vals = [v[in.(v, (I,))] for v in vals]
if filter
metrics = getunitanalysismetrics(S)
Sp = Dict(k => v for (k, v) in zip(ks, vals) if k ∈ metrics.ecephys_unit_id)
else
Sp = Dict(k => v for (k, v) in zip(ks, vals))
end
end
"""
Construct a sparse array of spike counts from a Dict of spike times
"""
function spikematrix(Sp::AbstractDict, bin = 1e-4; rectify = 4)
tmin, tmax = extrema(vcat(values(Sp)...))
units = Sp |> keys |> collect
if rectify > 0
tmax = round(tmax; digits = rectify)
tmin = round(tmin; digits = rectify)
end
ts = tmin:bin:tmax
spikes = spzeros(Float32, length(ts), length(units))
spikes = goSparseToolsArray(spikes, (𝑡(ts), Unit(units)))
@withprogress name="spikearray" begin
for u in eachindex(units)
_times = Sp[units[u]]
for t in eachindex(_times) # Hella slow
spikes[𝑡(Near(_times[t])), Unit(At(units[u]))] += 1
end
@logprogress u / length(units)
end
end
return spikes
end
# `count` is a boolean indicating whether to return the number of spikes in each bin, or sum the amplitudes
function _getspikes(units, times, amplitudes, _times, bin, rectify, count)
tmax = maximum(_times)
tmin = minimum(_times)
times = [filter(∈(tmin .. tmax), t) for t in times]
if rectify > 0
tmax = round(tmax; digits = rectify)
tmin = round(tmin; digits = rectify)
end
ts = tmin:bin:tmax
spikes = spzeros(Float32, length(ts), length(units))
spikes = goSparseToolsArray(spikes, (𝑡(ts), Unit(units))) # SparseToolsArray?
@withprogress name="spikearray" begin
for u in eachindex(units)
_times = times[u]
_amplitudes = amplitudes[u]
for t in eachindex(_times) # Hella slow
spikes[𝑡(Near(_times[t])), Unit(At(units[u]))] += (count ? 1 :
_amplitudes[t])
end
@logprogress u / length(units)
end
end
return spikes
end
"""
We combine the spike times and spike amplitudes into one sparse array, using a given bin width.
"""
function getspikes(S, timebounds = nothing; bin = 1e-4, rectify = 4, structure = nothing,
count = true)
times = isnothing(structure) ? getspiketimes(S) : getspiketimes(S, structure)
validunits = findvalidunits(S, keys(times))
times = Dict(k => v for (k, v) in times if k ∈ validunits)
units = times |> keys |> collect
times = times |> values |> collect
amplitudes = S |> getspikeamplitudes
amplitudes = getindex.((amplitudes,), units)
@assert all(length.(times) .== length.(amplitudes))
# Set up the sparse dim array, then allocate spikes to the nearest time index
_times = isnothing(times) ? vcat(_times...) : timebounds
_getspikes(units, times, amplitudes, _times, bin, rectify, count)
end
function getspikes(S, stimulus::String; n = 1, kwargs...)
timebounds = getstimulustimes(S, stimulus)[n]
getspikes(S, timebounds; kwargs...)
end
function getspikes(S, stimulus::String, structure::String; kwargs...)
spikes = getspikes(S, stimulus; kwargs...)
structures = getstructureacronyms(S, dims(spikes, Unit))
spikes = spikes[:, findall(structures .== structure)]
end
"""
A function to easily grab formatted spike data for a given session, using some sensible default parameters
"""
function formatspikes(; sessionid = 757216464, stimulus = "gabors", structure = "VISp",
epoch = 1, bin = 1e-4, kwargs...)
sesh = Session(sessionid)
S = getspikes(sesh, stimulus, structure; bin, rectify = 4, structure, count = true,
epoch)
end
function getunitstructureacronyms(session::AbstractSession, units)
unittable = getunitmetrics(session)
acronyms = Vector{Any}(undef, size(units))
[acronyms[i] = notemptyfirst(unittable[unittable.unit_id .== units[i],
:structure_acronym]) for i in 1:length(units)]
return acronyms
end
function minspikediff(S::AbstractSession)
diffs = S |> getspiketimes |> values .|> diff
return minimum(minimum.(diffs)) # Just greater than 1e-4
end
# function clusterunits(spikes; dist=CosineDist())
# D = pairwise(dist, spikes|>Array, dims=2)
# h = hclust(D)
# end
# function getreceptivefield(session, unit)
# rf = stimulusmapping.ReceptiveFieldMapping(session.pyObject)
# field = rf.get_receptive_field(unit)
# end
function getisis(x::AbstractSparseDimVector)
s = findnz(x |> SparseVector)[1]
t = dims(x, Ti) |> collect
I = AN.ephys_features.get_isis(t, s)
@assert I ≈ diff(t[s]) # Yeah there's this
return I
end
function getisis(S::AbstractSession)
ts = getspiketimes(S)
isis = Dict(a => diff(b) for (a, b) in ts)
end
function getisis(S::AbstractSession, units)
isis = getisis(S)
isis = Dict(a => diff(b) for (a, b) in isis if a in units)
end
# function detectbursts(isis::AbstractVector)
# AN.ephys_features.detect_bursts(isis, isi_types, fast_tr_v, fast_tr_t, slow_tr_v, slow_tr_t, thr_v, tol=0.5, pause_cost=1.0)
# end
import DataFrames.subset
function subset(d::DataFrame, col, vals::AbstractVector)
idxs = indexin(vals, d[:, col])
return d[idxs, :]
end
subset(d::DataFrame, col, vals::Base.KeySet) = subset(d, col, collect(vals))
subset(d::DataFrame, col, vals::Dim) = subset(d, col, collect(vals))
subset(d::DataFrame, col, vals::DataFrame) = subset(d, col, vals[:, col])
function subset(d::DataFrame, col, val)
idxs = findall(d[:, col] .== val)
return d[idxs, :]
end
export subset
# function receptivefieldcentrality(unit; centre=(0, 0), metrics=AN.getunitanalysismetricsbysessiontype("brain_observatory_1.1"))
# # rf = AN.getreceptivefield(session, unit)
# end
function receptivefieldfilter(am::DataFrame)
am = am[[ismissing(𝑝) || 𝑝 < 0.01 for 𝑝 in am.p_value_rf], :]
return am.unit_ids
end
function receptivefieldfilter(units::AbstractVector;
am = AN.getunitanalysismetricsbysessiontype("brain_observatory_1.1"))
am = AN.subset(am, :ecephys_unit_id, units)
return receptivefieldfilter(am)
end
function alignspiketimes(session, X, ::Val{:flashes}; x_position = nothing,
y_position = nothing)
stims = stimulusintervals(session, "flashes")
intervals = stims.interval
times = values(X)
units = keys(X)
_times = []
for ts in times
_ts = []
for i in intervals
push!(_ts, ts[ts .∈ (i,)])
end
push!(_times, _ts)
end
return Dict(units .=> _times)
end
function alignspiketimes(session, X, stimulus = "flashes"; kwargs...)
alignspiketimes(session, X, stimulus |> Symbol |> Val; kwargs...)
end
function countspikes(ts::AbstractVector, T::Real)
# ts should be sorted
ts = deepcopy(ts)
m = maximum(ts)
_t = minimum(ts)
x = zeros(floor(Int, (m - _t) / T))
for i in eachindex(x)
idxs = (ts .≥ (_t + (i - 1) * T)) .& (ts .< (_t + i * T,))
x[i] = length(splice!(ts, findall(idxs))) # * Make x shorter so future searches are quicker
end
return x
end
function fanofactor(ts::AbstractVector, T::Real)
# * Calculate the fano factor using non-overlapping windows
ts = sort(ts)
x = countspikes(ts, T)
return var(x) / mean(x)
end
function defaultfanobins(ts)
maxwidth = (first ∘ diff ∘ collect ∘ extrema)(ts) / 10
minwidth = max((mean ∘ diff)(ts), maxwidth / 10000)
# spacing = minwidth
return 10.0 .^ range(log10(minwidth), log10(maxwidth); length = 100)
end
function fanofactor(ts::AbstractVector, T::AbstractVector = defaultfanobins(ts))
(T, fanofactor.((ts,), T))
end
function metricmap(stimulus)
if stimulus == "flashes"
return :fl
elseif stimulus == "drifting_gratings"
return :dg
elseif stimulus == "natural_scenes"
return :ns
elseif stimulus == "gabors"
return :rf
elseif stimulus == "static_gratings"
return :sg
elseif isnothing(stimulus)
return nothing
end
end
function getmetric(metrics::DataFrame, metric, stimulus)
sesh = metricmap(stimulus)
if isnothing(sesh)
return metrics[:, Symbol(metric)]
else
return metrics[:, Symbol(reduce(*, string.([metric, :_, sesh])))]
end
end
function getfano(metrics::DataFrame, stimulus)
sesh = metricmap(stimulus)
return metrics[:, Symbol(reduce(*, string.([:fano_, sesh])))]
end
function findvalidunits(session, units; kwargs...)
units = collect(units)
metrics = getunitanalysismetrics(session; filter_by_validity = true, kwargs...)
check = units .∈ (metrics.ecephys_unit_id,)
return units[check]
end
function findvalidunits(session, spikes::Dict)
units = findvalidunits(session, keys(spikes))
return Dict(units .=> getindex.((spikes,), units))
end
function getclosestchannels(session, probeid, units, channels)
channels = collect(channels)
cdepths = getchanneldepths(session, probeid, channels)
udepths = getunitdepths(session, probeid, units)
dists = [abs.(cdepths .- u) for u in udepths]
idxs = last.(findmin.(dists))
channels = channels[idxs]
Dict(units .=> channels)
end
function getclosestchannels(sessionid::Int, args...)
getclosestchannels(Session(sessionid), args...)
end
function getpeakchannels(session, units)
metrics = getunitmetrics(session)
k = hasproperty(metrics, :unit_id) ? :unit_id : :ecephys_unit_id
check = all(units .∈ (getproperty(metrics, k),))
if !check
@error "Some units do not have corresponding metrics"
end
metrics = subset(metrics, k, units)
channels = Dict(zip(units, metrics.peak_channel_id))
end
getpeakchannels(sessionid::Int, args...) = getpeakchannels(Session(sessionid), args...)
function getunitchannels(session, units)
metrics = getunitanalysismetrics(session)
check = all(units .∈ (metrics.ecephys_unit_id,))
if !check
@error "Some units do not have corresponding metrics"
end
metrics = subset(metrics, :ecephys_unit_id, units)
channels = Dict(zip(metrics.ecephys_channel_id))
end
getunitchannels(sessionid::Int, args...) = getunitchannels(Session(sessionid), args...)
| AllenNeuropixelsBase | https://github.com/brendanjohnharris/AllenNeuropixelsBase.jl.git |
|
[
"MIT"
]
| 0.3.0 | 215ea07f170cd9732aa7d7745c672f69baf3dc02 | code | 15503 | function getchangetrials end
function getchangetrialtimeseries end
export getchangetrials, getchangetrialtimeseries, stimulustimeseries
module VisualBehavior
# using ..AllenNeuropixelsBase
import ..AllenNeuropixelsBase as ANB
using PythonCall
using NWBStream
using DataFrames
using Downloads
using JSON
using HDF5
using IntervalSets
using TimeseriesTools
import NWBStream.url2df
import ..AllenNeuropixelsBase: AbstractNWBSession, AbstractSession, py2df
import DataFrames.groupby
const visualbehavior = "https://visual-behavior-neuropixels-data.s3.us-west-2.amazonaws.com/"
const visualbehaviorbehavior = visualbehavior * "visual-behavior-neuropixels/"
"""
getmanifesturl(manifest_version="0.5.0")
Return the URL for the neuropixels visual behavior project manifest file hosted on a given `hostname` server and version `manifest_version`.
## Arguments
- `manifest_version::String`: The version of the manifest file. Default value is `"0.5.0"`.
Other manifest version numbers can be identified here: https://s3.console.aws.amazon.com/s3/buckets/visual-behavior-neuropixels-data?prefix=visual-behavior-neuropixels%2Fmanifests%2F®ion=us-west-2
"""
function getmanifesturl(manifest_version = "0.5.0")
object_key = "manifests/visual-behavior-neuropixels_project_manifest_v$manifest_version.json"
return visualbehaviorbehavior * object_key
end
function getmanifest(args...)
hostname = getmanifesturl(args...)
data = String(take!(Downloads.download(hostname, IOBuffer())))
JSON.parse(data)
end
"""
filetree(paths::Vector{String})
Creates a dictionary-like object representing the directory and file structure from a list of file paths.
## Arguments:
* paths: A vector of file paths to include in the tree.
## Returns:
* dict_tree : A dictionary-like object representing the directory and file structure.
"""
function filetree(paths::Vector{String})
dict_tree = Dict{String, Any}()
for path in paths
current_dict = dict_tree
components = splitpath(path)
for component in components[1:(end - 1)]
if !haskey(current_dict, component)
current_dict[component] = Dict{String, Any}()
end
current_dict = current_dict[component]
end
current_dict[components[end]] = path
end
return dict_tree
end
"""
datapaths()
Get the paths to the visual behavior neuropixels data on Amazon S3 as a tree-like dictionary.
"""
function datapaths()
data = getmanifest()
ks = merge([data[k] for k in keys(data) if data[k] isa Dict]...)
ks = getindex.([ks[k] isa Dict ? ks[k] : Dict(k => ks[k]) for k in keys(ks)], ["url"])
tree = filetree(String.(ks))
return tree["https:"]["visual-behavior-neuropixels-data.s3.us-west-2.amazonaws.com"]["visual-behavior-neuropixels"]
end
const manifest = datapaths()
struct Session <: AbstractSession
pyObject::Any
behavior_pyObject::Any
function Session(pyObject)
behavior_pyObject = ANB.behaviorcache().get_behavior_session(pyObject.behavior_session_id)
new(pyObject, behavior_pyObject)
end
end
function Session(session_id::Int; kwargs...)
@debug "Constructing a session from id $session_id"
ANB.getsessiondata(session_id; kwargs...) |> Session
end
Session(; params...) = Session(params[:sessionid])
getprobes() = manifest["project_metadata"]["probes.csv"] |> url2df
getchannels() = manifest["project_metadata"]["channels.csv"] |> url2df
ANB.getid(S::Session) = pyconvert(Int, S.pyObject.metadata["ecephys_session_id"])
getbehaviorid(S::Session) = pyconvert(Int, S.pyObject.behavior_session_id)
function ANB.getchannels(S::Session, args...; kwargs...)
df = py2df(S.pyObject.get_channels())
ANB.getchannels(df, args...; kwargs...)
end
const sources = Dict(:Allen_neuropixels_visual_behavior => "https://visual-behavior-neuropixels-data.s3.us-west-2.amazonaws.com")
function ANB.getlfppath(session::Session, probeid)
probe = ANB.getprobeobj(session, probeid)
@assert pyconvert(Int, probe.id) == probeid
name = probe.name
try
path = pyconvert(String, probe._lfp_meta.lfp_csd_filepath()._str)
catch # Probe has no file name for some reason. Make a hacky guess
@warn "Malformed probe object. Guessing path"
path = joinpath(ANB.behaviormanifest, "visual-behavior-neuropixels-0.5.0",
"behavior_ecephys_sessions",
string(pyconvert(Int,
session.pyObject.metadata["ecephys_session_id"])),
"probe_$(name)_lfp.nwb")
end
end
function ANB.isinvalidtime(session::Session, probeids = getprobeids(session), times = NaN)
# paths = ANB.getlfppath.((session,), probeids)
# for path in paths
# f = h5open(path)
# end
false # no invalid times for VBN as far as I can see
end
function ANB.getlfptimes(session::Session, probeid)
path = ANB.getlfppath(session, probeid)
if !isfile(path)
@error "Probe lfp data file does not exist. This may be becuase you have not downloaded the probe data. Try using `getlfp`"
end
f = h5open(path)
stem = ANB.resolvenwblfp(session, probeid)
times = f["acquisition"][stem][stem * "_data"]["timestamps"][:]
close(f)
return times
end
function ANB.getperformancemetrics(session::Session)
pyconvert(Dict, session.behavior_pyObject.get_performance_metrics())
end
function S3Session(session_id::Int, args...; kwargs...)
ANB.S3Session(getsessionfile(session_id), args...; kwargs...)
end
"""
getsessionfiles()
Return a dictionary mapping session IDs to their corresponding file paths.
"""
function getsessionfiles()
files = manifest["behavior_ecephys_sessions"]
sessionids = keys(files)
D = Dict()
for s in sessionids
subfiles = files[s]
subfile = findfirst(subfiles) do f
occursin("ecephys_session_$s", f)
end
push!(D, s => subfiles[subfile])
end
return D
end
getsessionfile(session_id::Int, args...) = getsessionfiles(args...)["$session_id"]
function getsessiontable()
st = manifest["project_metadata"]["ecephys_sessions.csv"] |> url2df
st.structure_acronyms = [replace.(split(a, ','), r"[\[\]\'\s]" => "")
for a in st.structure_acronyms]
st.ecephys_structure_acronyms = st.structure_acronyms
return st
end
function getbehaviorsessiontable()
st = manifest["project_metadata"]["behavior_sessions.csv"] |> url2df
return st
end
getunits() = manifest["project_metadata"]["units.csv"] |> url2df
function getunitanalysismetricsbysessiontype()
session_table = ANB.VisualBehavior.getsessiontable()
units = getunits()
sessionmetrics = innerjoin(session_table, metrics, on = :ecephys_session_id)
end
function getprobes(session::AbstractNWBSession)
probes = VisualBehavior.getprobes()
return subset(probes, :ecephys_session_id => ByRow(==(ANB.getid(session))))
end
function getprobefiles()
files = manifest["behavior_ecephys_sessions"]
sessionids = keys(files)
D = deepcopy(files)
for s in sessionids
subfiles = D[s]
subfile = findfirst(subfiles) do f
occursin("ecephys_session_$s", f)
end
delete!(subfiles, subfile)
end
return D
end
getprobefiles(S::AbstractNWBSession) = getprobefiles()[string(ANB.getid(S))]
function getprobefile(session::AbstractNWBSession, name::AbstractString)
files = getprobefiles(session)
return files["probe_$(name)_lfp.nwb"]
end
function getprobefile(session::AbstractNWBSession, probeid::Int)
getprobefile(session,
first(subset(getprobes(session),
:ecephys_probe_id => ByRow(==(probeid))).name))
end
function ANB.getepochs(S::Session)
df = S.pyObject.stimulus_presentations |> py2df
df.interval = [a .. b for (a, b) in zip(df.start_time, df.end_time)]
df = groupby(df, :stimulus_block)
_intersect(x) = minimum(minimum.(x)) .. maximum(maximum.(x))
df = DataFrames.combine(df, :interval => _intersect => :interval,
:active => unique => :active,
:stimulus_block => unique => :stimulus_block,
:stimulus_name => unique => :stimulus_name)
df.start_time = minimum.(df.interval)
df.end_time = maximum.(df.interval)
df.duration = df.end_time - df.start_time
df.stop_time = df.end_time
return df
end
# * The goal is now to copy all of the convenience functions in AllenAttention.jl to here...
# Will just need to overload getlfp and getspikes, since we can use the allensdk to get all the session metadata and such.
# Will need VisualBehaviorNeuropixelsProjectCache
# from allensdk.brain_observatory.behavior.behavior_project_cache import VisualBehaviorNeuropixelsProjectCache
# See from allensdk.brain_observatory.behavior.behavior_project_cache import VisualBehaviorNeuropixelsProjectCache
# All the api above should go into allen neuropixels. This here is a small package.
# Session(sessionid::Int) = sessionid |> getsessionfile |> ANB.Session
# function getlfp(session::S3Session, probeid::Int; channels=getlfpchannels(session, probeid), times=ClosedInterval(extrema(getlfptimes(session, probeid))...), inbrain=false)
# end
# VisualBehaviorNeuropixelsProjectCache = ANB.behavior_project_cache.behavior_neuropixels_project_cache.VisualBehaviorNeuropixelsProjectCache
# VisualBehaviorNeuropixelsProjectCache.from_s3_cache(mktempdir())
function ANB.getchannels(S::Session)
s = py2df(S.pyObject.get_channels())
end
function getunitanalysismetrics(; filter_by_validity = nothing) # Extra kwarg for Visual Coding compat
session_table = ANB.VisualBehavior.getsessiontable()
metrics = ANB.behaviorcache().get_unit_table() |> py2df
metrics = outerjoin(metrics, session_table; on = :ecephys_session_id)
end
function ANB.getunitanalysismetrics(session::Session; kwargs...)
ANB.getunitmetrics(session; kwargs...)
end
function ANB.getunitmetrics(session::Session; filter_by_validity = false)
if filter_by_validity
@warn "Filtering by validity is not implemented for visual behavior neuropixels data"
end
str = session.pyObject.get_units()
df = py2df(str)
df.ecephys_unit_id = df.id
df.ecephys_channel_id = df.peak_channel_id
df
end
function ANB.getprobeobj(S::Session, probeid)
probes = S.pyObject.get_probes_obj()
probeids = [pyconvert(Int, probe.id) for probe in probes.probes]
i = findfirst(probeids .== probeid)
if isempty(i)
@error "Probe id $probeid not found in session $(getid(S))"
end
thisprobe = i - 1
probe = probes.probes[thisprobe]
end
## Behavior metrics
import AllenNeuropixelsBase: gettrials, getlicks, getrewards, geteyetracking,
getrunningspeed, getbehavior, getchangetrials,
getchangetrialtimeseries
function gettrials(S::Session)
df = S.pyObject.trials |> py2df
df.interval = [a .. b for (a, b) in zip(df.start_time, df.stop_time)]
return df
end
getlicks(S::Session) = S.pyObject.licks |> py2df
getrewards(S::Session) = S.pyObject.rewards |> py2df
geteyetracking(S::Session) = S.pyObject.eye_tracking |> py2df
_getrunningspeed(S::Session) = S.pyObject.running_speed |> py2df
function _getbehavior(S::Session)
fs = (gettrials, getlicks, getrewards, geteyetracking, getrunningspeed)
dfs = [f(S) for f in fs]
end
function stimulustimeseries(session; blanks = true)
df = ANB.getstimuli(session)
x = TimeseriesTools.TimeSeries(df.start_time, df.image_name)
y = TimeseriesTools.TimeSeries(df.end_time, df.image_name)
if blanks
xx = TimeseriesTools.TimeSeries(times(x) .- 1 / 1250, fill("blank", length(x)))
yy = TimeseriesTools.TimeSeries(times(y) .+ 1 / 1250, fill("blank", length(y)))
x = TimeseriesTools.interlace(x, xx)
y = TimeseriesTools.interlace(y, yy)
end
TimeseriesTools.interlace(x, y)
end
function getchangetrials(session)
df = gettrials(session)
df = df[df.is_change, :]
# Get corrected change time by matching stimulus frame with start time in stimulus table
stimuli = ANB.getstimuli(session)
stimuli.change_frame = stimuli.start_frame
stimuli = innerjoin(df, stimuli, on = :change_frame, makeunique = true)
df.change_time_with_display_delay = stimuli.start_time_1
# Get response (lick) latency
df.lick_latency = df.response_time - df.change_time_with_display_delay # ? Do we want to use the precise lick times from the licks dataframe?
return df
end
function getchangetrialtimeseries(session)
# Make an irregular time series of when the change trials occur
trials = getchangetrials(session)
t = trials.change_time_with_display_delay
vars = [:go,
:catch,
:hit,
:miss,
:aborted,
:false_alarm,
:correct_reject,
:lick_latency,
:auto_rewarded,
:initial_image_name,
:change_image_name]
X = hcat([trials[:, s] for s in vars]...)
return TimeSeries(t, vars, X)
end
flashesset = (Val{:Natural_Images_Lum_Matched_set_ophys_G_2019},
Val{:Natural_Images_Lum_Matched_set_ophys_H_2019})
function ANB.alignlfp(session, X, stimulus::Union{flashesset...}; trail = :change,
trials = nothing, conditions = nothing, nonconditions = nothing,
zero = false)
stimulus = string(typeof(stimulus).parameters[1])
flash = 0.250 # s see visual behavior white paper
iti = 0.500 # s
is = ANB.stimulusintervals(session, stimulus)
if trail === :change # In this case the X should only be from around change trials
is = getchangetrials(session)
# idxs = indexin(stimuli.trials_id, ANB.getstimuli(session, stimulus).trials_id)
# stimuli = stimuli[idxs, :]
end
if !isnothing(trials)
is = is[is.trials_id .∈ (trials.trials_id,), :]
end
if !isnothing(conditions)
for c in conditions
is = is[is[:, c] .== true, :]
end
end
if !isnothing(nonconditions)
for c in nonconditions
is = is[is[:, c] .== false, :]
end
end
if trail == :onset # The programmed change time
onsets = is.start_time
is = [onsets[i] .. min(onsets[i + 1], onsets[i] + flash + iti)
for i in 1:(length(onsets) - 1)]
elseif trail == :offset # The programmed off time
offsets = is.stop_time
onsets = is.start_time[2:end]
is = [offsets[i] .. min(offsets[i + 1], offsets[i] + iti)
for i in 1:(length(offsets) - 1)]
elseif trail == :change # The true change time, including display delay
onsets = is.change_time_with_display_delay
onsets = [onsets; Inf]
is = [onsets[i] .. min(onsets[i + 1], onsets[i] + flash + iti)
for i in 1:(length(onsets) - 1)]
else
is = is.interval
end
X = ANB.rectifytime(X)
_X = [X[𝑡(g)] for g in is]
_X = _X[.!isempty.(_X)]
_X = [x for x in _X if size(x, Ti) > 100] # Remove short trials
_X = [x[1:minimum(size.(_X, Ti)), :] for x in _X] # Catch any that are one sample too long
_X = ANB.rectifytime.(_X; zero)
@assert all(all(size.(x, 1) .== size(x[1], 1)) for x in _X)
return _X
end
end
export VisualBehavior
getprobefiles(S::AbstractNWBSession; dataset = VisualBehavior) = dataset.getprobefiles(S)
| AllenNeuropixelsBase | https://github.com/brendanjohnharris/AllenNeuropixelsBase.jl.git |
|
[
"MIT"
]
| 0.3.0 | 215ea07f170cd9732aa7d7745c672f69baf3dc02 | code | 13733 | ### A Pluto.jl notebook ###
# v0.19.22
using Markdown
using InteractiveUtils
# ╔═╡ 98c9bbd2-aac5-4c90-ac0c-d8d935f5cdaf
# For WGLMakie
begin
using Pkg
Pkg.add("JSServe")
using JSServe
Page()
end
# ╔═╡ c445ccf4-cf10-43b9-9c01-4051abc400ba
begin
Pkg.activate("../")
# Pkg.add(url="https://github.com/brendanjohnharris/NWBStream.jl#main")
# Pkg.add(url="https://github.com/brendanjohnharris/AllenNeuropixelsBase.jl#main")
# # Pkg.add("WGLMakie")
# Pkg.add("DataFrames")
# Pkg.add("Statistics")
# Pkg.add("FileIO")
end
# ╔═╡ 79b92c17-cc5f-4ca2-8b08-f6015729a9a9
using DataFrames
# ╔═╡ 1a3eaeb7-db19-4bc3-b61a-84dd9caad009
using Statistics
# ╔═╡ c1397e8e-3ac2-4f49-8d88-cc1400a3b93e
using FileIO
# ╔═╡ 0a622047-c238-49c3-bdf0-3248d0f0d261
# Just for me
# begin
# using Revise
# cd("../../")
# Pkg.activate()
# Pkg.develop(path="./AllenNeuropixelsBase")
# cd("./AllenNeuropixelsBase")
# Pkg.activate("./")
# end
# ╔═╡ 766a8af5-4c89-4fe7-883d-d960ef91edfd
md"""
# Allen Neuropixels Visual Behavior
_Accessing the Allen Neuropixels visual behavior dataset in Julia_
"""
# ╔═╡ bea5de79-6e8a-42d8-ab76-bae8e3c23747
md"""
## Background
Details on neuropixels and the visual coding dataset can be found in the Allen SDK [docs](https://allensdk.readthedocs.io/en/latest/visual_behavior_neuropixels.html) or the [white-paper](https://brainmapportal-live-4cc80a57cd6e400d854-f7fdcae.divio-media.net/filer_public/f7/06/f706855a-a3a1-4a3a-a6b0-3502ad64680f/visualbehaviorneuropixels_technicalwhitepaper.pdf).
"""
# ╔═╡ f9ac9f6e-f129-4542-81a8-36e6cef9857a
md"## Required packages"
# ╔═╡ c48bd78e-aab0-49c0-b137-567c208b8aa1
md"""
Interfacing with the Python [Allen SDK](https://github.com/AllenInstitute/AllenSDK) is handled by the [AllenNeuropixelsBase](https://github.com/brendanjohnharris/AllenNeuropixelsBase.jl) package. We will use the WGLMakie for plots, as well as DataFrames and Statistics for working with tables.
"""
# ╔═╡ d8fd4541-08a5-4ace-a998-769771c976e8
import AllenNeuropixelsBase as ANB
# ╔═╡ 2e3d037c-932d-4d5a-afdb-351e836bdfb2
# using WGLMakie
# ╔═╡ 5bfaefae-11a5-4567-8b83-d583f03a75a8
md"""
## Choosing a session
The Allen neuropixels visual coding dataset is subdivided into sessions. A session contains data from one murine subject across a recording interval during which it was shown a variety of visual stimuli (such as natural scenes, drift gratings and gabors). These data include local field potentials (LFP) and spike times from each of the 374 data channels on, usually, six neuropixels probes inserted around the visual cortex. The LFP data is also downsampled by a half in time and a quarter over channels.
The entire neuropixels visual coding dataset contains dozens of sessions and is hundreds of megabytes in size, so we will first choose one session (a few gigabytes of data) instead of performing group-level analyses. To produce a dataframe of session details:
"""
# ╔═╡ 754f94e0-ccb2-4dc0-a534-ae94dd02bc02
session_table = ANB.VisualBehavior.getsessiontable()
# ╔═╡ a2f81f74-36ed-42d4-89d5-828327c67318
md"""We'll pick a session that has six probes:"""
# ╔═╡ efd3ef52-4acb-4ffd-b794-1dfc4d9819c8
function numprobes(sessionid)
session_table[session_table[!, :ecephys_session_id].==sessionid, :probe_count][1]
end
# ╔═╡ e30e349c-6ad7-402b-90d1-7720b85a9c2c
md"And look for sessions that have probes intersecting the target regions listed in the white paper:"
# ╔═╡ d2d20884-0fcd-4ac7-8a14-dbf936445c3b
function targetintersections(sessionid)
s = session_table[session_table.ecephys_session_id.==sessionid, :structure_acronyms][1]
targets = ["VISp", "VISl", "VISrl", "VISal", "VISpm", "VISam", "CA1", "CA3", "DG", "SUB", "ProS", "LGd", "LP", "APN"]
structures = eachmatch(r"'(.*?)'", s)
structures = [replace(x.match, r"'" => s"") for x ∈ structures]
targetsintersected = [x ∈ structures for x ∈ targets]
return mean(targetsintersected)
end;
# ╔═╡ 99fe41d6-661d-4b9f-a853-2f32ace53d72
# md"""
# We can filter down sessions in a few more ways. Firstly, the visaul coding data is divided into two stimulus sets. To summuraise the white paper:
# - The **Brain Observatory 1.1** stimulus set:
# - Gabor patches appearing randomly on a 9 x 9 grid
# - Dark or light flashes
# - Drift gratings in 8 directions and 5 temporal frequencies, with 15 repeats per condition
# - Static gratings at 6 orientations, 5 spatial frequencies, and 4 phases
# - 118 natural images
# - Two natural movies from Touch of Evil; a 30 second clips repeated 20 times and a 120 second clip repeated 10 times
# - The **Functional Connectivity** stimulus set:
# - Gabor patches
# - Dark or light flashes
# - Drift gratings in 4 directions and one temporal frequency with 75-80 repeats
# - Drift gratings in 4 directions and 9 contrasts
# - One natural movie shown 60 times plus 20 repeats of a temporally shuffled version
# - A dot motion stimulus of approximately 200 white dots on a gray background moving at one of 7 speeds in four different directions
# In summary, the Brain Observatory dataset contains a greater variety of stimuli but a smaller number of repeats than the Functional Connectivity dataset. **We'll look at sessions in the Brain Observatory dataset.**
# """
# ╔═╡ 82ce6d0f-b60b-41f2-bdce-c6ecf545bf65
md"""
Next, we can inspect the unit quality metrics of each session. Three metric criteria have recommended values:
- `amplitude_cutoff_maximum = 0.1`: Limits the approximate false negative rate in spike detection, calculated by assuming the distribution of amplitudes is symmetric.
- `presence_ratio_minimum = 0.9`: Ensures proportion of 100 recording sub-intervals that have at least one spike detection is above 90% (i.e. the unit has not drifted and the sorting algorithm is correctly identifying spikes).
- `isi_violations_maximum = 0.5`: Limits the number of units that record from multiple neurons. Inter-spike interval (ISI) violations are detections of spikes that occur during the typical refractory period of a single neuron, so are likely to originate from a second neuron.
To access a dataframe of metrics:
"""
# ╔═╡ 5d47cb91-d8c7-41df-9778-c9a77266ba93
# This can take a while
metrics = ANB.VisualBehavior.getunits()
# ╔═╡ c62a118e-713e-424f-9420-f310131c7018
sessionmetrics = innerjoin(session_table, metrics, on=:ecephys_session_id)
# ╔═╡ d3064ff9-798f-4469-9ac5-43b94c9e9a92
setindex!.([sessionmetrics], missing, findall(Matrix(sessionmetrics .== "")))
# ╔═╡ 7d00cd72-a2c0-45a9-b777-b347286f7390
md"Some session-level metrics are:"
# ╔═╡ fd03139c-4bd1-4f26-a8c3-46c3feefd9c5
session_metrics = combine(groupby(sessionmetrics, :ecephys_session_id),
:ecephys_session_id => numprobes ∘ unique => :num_probes,
:ecephys_session_id => targetintersections ∘ unique => :target_intersections,
:genotype => (x -> all(isequal.(x, ("wt/wt",)))) => :is_wt,
:max_drift => median ∘ skipmissing,
:d_prime => median ∘ skipmissing,
:isolation_distance => median ∘ skipmissing,
:silhouette_score => median ∘ skipmissing,
:snr => median ∘ skipmissing)
# ╔═╡ 51eccd32-d4e9-4330-99f5-fca0f8534e43
md"""
Of particular importance are the first five columns. The ideal session will have 6 probes, LFP data for all units and for now we wish to choose a wild type mouse. It should also contain data for probes that intersect with the major regions of interest highlighted in the white paper. The maximum drift, which measures mean (and possibly variance) nonstationarity unrelated to the visual stimulus (such as probe motion relative to the brain) should also be minimised. We can also look for probes that intersect all of the target regions, given in the white paper as the visual areas, the hippocampal formation, the thalamus and the midbrain:
"""
# ╔═╡ 927605f4-0b59-4871-a13f-420aadedd487
oursession = subset(session_metrics,
:target_intersections => ByRow(>(0.85)),
:is_wt => ByRow(==(true)),
:max_drift_median_skipmissing => ByRow(<(99)))
# ╔═╡ 5973ddbe-f839-44d8-af08-46b1813e8750
sort!(oursession, :max_drift_median_skipmissing)
# ╔═╡ 395a90c4-fe98-49bc-9883-d4278cd38bae
session_id = oursession[1, :].ecephys_session_id
# ╔═╡ 23d8fad0-5c51-4056-8df3-fd850db7b560
md"""
For a smaller quantity of data we can also pick just one probe from this session: `probeC: 769322749` intersects a few interesting regions, like the primary visual cortex, the hippocampus and the thalamus.
"""
# ╔═╡ 99e2e888-c1cf-4370-b1b4-eccc6cbda7de
# probeid = 769322749
# ╔═╡ d552f132-6f90-4aba-9e05-1e7e20929756
md"""
## Inspecting data
To mimic the Allen SDK's interface we can use a custom type wrapping a session obect:
"""
# ╔═╡ c3093ce3-7b73-49d4-8ce8-aaea4b49b685
session = ANB.VisualBehavior.Session(session_id);
ANB.initialize!(session);
# ╔═╡ 3ec0b209-2287-4fcf-be04-688bd4fb327a
# sessionid = AN.getid(session)
# ╔═╡ ebe8631b-4248-4b5a-94e2-071c0b560747
md"The six probes for this session are:"
# ╔═╡ c77034a4-a6b4-4970-bdc8-9a6b30cbb687
probes = ANB.getprobes(session)
# ╔═╡ 12d66773-c567-4e5a-a119-4fa5e06ec98c
md"We are only interested in channels located within the brain, so the `missing` structure ids are removed and the channels for this session become:"
# ╔═╡ 5f944e90-5232-4508-9a3a-c678e6804104
channels = subset(ANB.getchannels(session), :structure_acronym => ByRow(!=("root")))
# ╔═╡ 423edd0f-60ed-4d9a-b84a-47e47e560ae2
md"""
We can then plot the probe locations on the reference atlas. Note that the colored regions correspond to the target structures, and the straight probes have been warped into the common coordinate framework:
"""
# ╔═╡ 12f8e03b-4ea3-4211-a9b1-f8432dfae3a9
#s = AN.Plots.plotreferencevolume(session; dostructures=true,
# ids=:targets,
# show_axis=false,
# shading=true); rotate_cam!(s, Vec3f0(0, 2.35, 0)); s
# To save you from waiting for the structure masks to download:
# @html_str read(download("https://dl.dropbox.com/s/se2doygr56ox8hs/probelocations.html?dl=0"), String)
# This renders best in firefox
# ╔═╡ bdb2de60-33c6-4d65-967e-92dcc9dafe69
md"""
To identify a probe that passes through a given structure:
"""
# ╔═╡ 4b94916e-2316-442a-bf98-f6cc63ca0591
structure = "VISp"
# ╔═╡ a61c6563-80ea-451c-82fd-7e6d1fcba752
probeid = ANB.getprobe(session, structure)
# ╔═╡ b9c2e65c-03cf-45d7-9309-b601f486c62b
md"""
The LFP data for our probe can be accessed as (warning, it is slow):
"""
# ╔═╡ f0241126-912b-4863-9d4e-917af1426602
params = (;
sessionid=ANB.getid(session), #
stimulus="spontaneous",
probeid, #
structure,
epoch=2
)
# ╔═╡ 2a9ccb08-29a2-4f4b-a01a-2c97c12a96b8
ANB.getid(session)
# ╔═╡ 7ec55a76-e63e-4920-997c-af80610eba73
LFP = ANB.formatlfp(; params...)
# ╔═╡ d0a301a0-038c-4827-8683-e9d8807186ea
md"And sorted by depth with:"
# ╔═╡ a5fca30e-531e-4b09-97e9-a762059dc66c
# sortedLFP = AN.sortbydepth(session, probeid, LFP)[:, end:-1:1]
# ╔═╡ 39ae3db9-b799-4389-80e7-e898e4e88a84
# fig = AN.Plots.neuroslidingcarpet(sortedLFP[1:5000, :]; size=(800, 1600))
# ╔═╡ 87ab5ec5-67a9-413d-8789-6a8b7113de65
md"""
There are still channels with little signal outside of the brain and at the very surface of the isocortex. To remove these, downsample by 10x and use data from only one stimulus epoch:
"""
# ╔═╡ da9fa8b0-afcf-4f3d-bd6d-856b69ab6d28
# begin
# depthcutoff = 200 # μm
# times = AN.getepochs(session, "natural_movie_three")[1, :]
# times = [times.start_time, times.stop_time]
# inbrainLFP = AN.getlfp(session, probeid; inbrain=depthcutoff, times)
# end
# ╔═╡ Cell order:
# ╠═98c9bbd2-aac5-4c90-ac0c-d8d935f5cdaf
# ╟─0a622047-c238-49c3-bdf0-3248d0f0d261
# ╟─766a8af5-4c89-4fe7-883d-d960ef91edfd
# ╟─bea5de79-6e8a-42d8-ab76-bae8e3c23747
# ╟─f9ac9f6e-f129-4542-81a8-36e6cef9857a
# ╟─c48bd78e-aab0-49c0-b137-567c208b8aa1
# ╠═c445ccf4-cf10-43b9-9c01-4051abc400ba
# ╠═d8fd4541-08a5-4ace-a998-769771c976e8
# ╠═2e3d037c-932d-4d5a-afdb-351e836bdfb2
# ╠═79b92c17-cc5f-4ca2-8b08-f6015729a9a9
# ╠═1a3eaeb7-db19-4bc3-b61a-84dd9caad009
# ╠═c1397e8e-3ac2-4f49-8d88-cc1400a3b93e
# ╟─5bfaefae-11a5-4567-8b83-d583f03a75a8
# ╠═754f94e0-ccb2-4dc0-a534-ae94dd02bc02
# ╟─a2f81f74-36ed-42d4-89d5-828327c67318
# ╠═efd3ef52-4acb-4ffd-b794-1dfc4d9819c8
# ╟─e30e349c-6ad7-402b-90d1-7720b85a9c2c
# ╠═d2d20884-0fcd-4ac7-8a14-dbf936445c3b
# ╠═99fe41d6-661d-4b9f-a853-2f32ace53d72
# ╟─82ce6d0f-b60b-41f2-bdce-c6ecf545bf65
# ╠═5d47cb91-d8c7-41df-9778-c9a77266ba93
# ╠═c62a118e-713e-424f-9420-f310131c7018
# ╠═d3064ff9-798f-4469-9ac5-43b94c9e9a92
# ╟─7d00cd72-a2c0-45a9-b777-b347286f7390
# ╠═fd03139c-4bd1-4f26-a8c3-46c3feefd9c5
# ╟─51eccd32-d4e9-4330-99f5-fca0f8534e43
# ╠═927605f4-0b59-4871-a13f-420aadedd487
# ╠═5973ddbe-f839-44d8-af08-46b1813e8750
# ╠═395a90c4-fe98-49bc-9883-d4278cd38bae
# ╟─23d8fad0-5c51-4056-8df3-fd850db7b560
# ╟─99e2e888-c1cf-4370-b1b4-eccc6cbda7de
# ╟─d552f132-6f90-4aba-9e05-1e7e20929756
# ╠═c3093ce3-7b73-49d4-8ce8-aaea4b49b685
# ╟─3ec0b209-2287-4fcf-be04-688bd4fb327a
# ╟─ebe8631b-4248-4b5a-94e2-071c0b560747
# ╠═c77034a4-a6b4-4970-bdc8-9a6b30cbb687
# ╟─12d66773-c567-4e5a-a119-4fa5e06ec98c
# ╠═5f944e90-5232-4508-9a3a-c678e6804104
# ╟─423edd0f-60ed-4d9a-b84a-47e47e560ae2
# ╠═12f8e03b-4ea3-4211-a9b1-f8432dfae3a9
# ╠═bdb2de60-33c6-4d65-967e-92dcc9dafe69
# ╠═4b94916e-2316-442a-bf98-f6cc63ca0591
# ╠═a61c6563-80ea-451c-82fd-7e6d1fcba752
# ╟─b9c2e65c-03cf-45d7-9309-b601f486c62b
# ╠═f0241126-912b-4863-9d4e-917af1426602
# ╠═2a9ccb08-29a2-4f4b-a01a-2c97c12a96b8
# ╠═7ec55a76-e63e-4920-997c-af80610eba73
# ╟─d0a301a0-038c-4827-8683-e9d8807186ea
# ╠═a5fca30e-531e-4b09-97e9-a762059dc66c
# ╠═39ae3db9-b799-4389-80e7-e898e4e88a84
# ╠═87ab5ec5-67a9-413d-8789-6a8b7113de65
# ╠═da9fa8b0-afcf-4f3d-bd6d-856b69ab6d28
| AllenNeuropixelsBase | https://github.com/brendanjohnharris/AllenNeuropixelsBase.jl.git |
|
[
"MIT"
]
| 0.3.0 | 215ea07f170cd9732aa7d7745c672f69baf3dc02 | code | 4576 | import AllenNeuropixelsBase as ANB
using AllenNeuropixelsBase.TimeseriesTools
using AllenNeuropixelsBase.NWBStream
using Test
using AllenNeuropixelsBase.DataFrames
ENV["JULIA_DEBUG"] = "CUDAExt,AllenNeuropixelsBase,AllenNeuropixels"
VCSESSIONID = 847657808
VCPROBEID = 848037574
VBSESSIONID = 1067588044
begin # * Download the files
session_id = VCSESSIONID
session = ANB.Session(session_id)
ANB.getprobes(session)
probeid = @test_nowarn ANB.getprobeids(session)[2]
ANB.getprobestructures(session)[probeid]
@test_nowarn ANB.listprobes(session)
@test ANB.getepochs(session) isa DataFrame
@test ANB.getprobes(session) isa DataFrame
# * Check channels
channels = ANB.getlfpchannels(session, probeid)
cdf = ANB.getchannels(session, probeid)
@test all(channels .∈ [cdf.id])
LFP = ANB._getlfp(session, probeid;
channelidxs=1:length(ANB.getlfpchannels(session, probeid)),
timeidxs=1:length(ANB.getlfptimes(session, probeid)))
end
# @testset "NWBStream.jl" begin
# f, io = @test_nowarn s3open("https://visual-behavior-neuropixels-data.s3.us-west-2.amazonaws.com/visual-behavior-neuropixels/behavior_ecephys_sessions/VCSESSIONID/ecephys_session_VCSESSIONID.nwb")
# s3close(io)
# end
# @testset "Stream Visual Behavior" begin
# st = @test_nowarn ANB.VisualBehavior.getsessiontable()
# @test st isa DataFrame
# session_id = st[2, :ecephys_session_id]
# url = ANB.VisualBehavior.getsessionfile(session_id)
# file, io = s3open(url)
# ANB.behavior_ecephys_session.BehaviorEcephysSession.from_nwb(file)
# session = ANB.VisualBehavior.S3Session(session_id)
# ANB.initialize!(session)
# ANB.getprobes(session)
# ANB.getprobeids(session)
# @test_nowarn ANB.listprobes(session)
# @test_nowarn ANB.getepochs(session)
# end
@testset "Format LFP" begin
params = (;
sessionid=VCSESSIONID,
stimulus="spontaneous",
probeid=VCPROBEID,
structure="VISl",
epoch=:longest,
pass=(1, 100))
X = ANB.formatlfp(; params...)
@test X isa ANB.LFPMatrix
@test X isa TimeseriesTools.RegularTimeSeries
end
# @testset "HybridSession" begin
# st = @test_nowarn ANB.VisualBehavior.getsessiontable()
# @test st isa DataFrame
# session_id = st[2, :ecephys_session_id]
# session = ANB.VisualBehavior.S3Session(session_id)
# ANB.initialize!(session)
# ANB.getprobes(session)
# ANB.getprobeids(session)
# @test_nowarn ANB.listprobes(session)
# @test_nowarn ANB.getepochs(session)
# end
@testset "Visual Behavior" begin
# st = @test_nowarn ANB.VisualBehavior.getsessiontable()
# @test st isa DataFrame
# session_id = st[end, :ecephys_session_id]
session_id = VBSESSIONID
session = ANB.Session(session_id)
# test_file = "/home/brendan/OneDrive/Masters/Code/Vortices/Julia/AllenSDK/test/ecephys_session_VBSESSIONID.nwb"
# f = ANB.behavior_ecephys_session.BehaviorSession.from_nwb_path(test_file)
probeid = @test_nowarn ANB.getprobeids(session)[2]
@test_nowarn ANB.getprobestructures(session)[probeid]
@test_nowarn ANB.listprobes(session)
@test_nowarn ANB.getepochs(session)
@test_nowarn ANB.getprobes(session)
# Now try to get some LFP data
@test ANB._getlfp(session, probeid;
channelidxs=1:length(ANB.getlfpchannels(session, probeid)),
timeidxs=1:length(ANB.getlfptimes(session, probeid))) isa TimeseriesTools.IrregularTimeSeries
structure = ANB.getprobestructures(session)[probeid]
structure = structure[occursin.(("VIS",), string.(structure))|>findfirst]
channels = @test_nowarn ANB.getlfpchannels(session, probeid)
cdf = @test_nowarn ANB.getchannels(session, probeid)
ANB._getchanneldepths(cdf, channels)
depths = @test_nowarn ANB.getchanneldepths(session, probeid, channels)
x = ANB.getlfp(session, structure)
@test x isa TimeseriesTools.IrregularTimeSeries
@test x isa TimeseriesTools.MultivariateTimeSeries
a = ANB.formatlfp(session; probeid, stimulus="spontaneous", structure=structure,
epoch=:longest)
b = ANB.formatlfp(; sessionid=session_id, probeid, stimulus="spontaneous",
structure=structure, epoch=:longest) # Slower, has to build the session
@assert a == b
# Test behavior data
S = session
@test ANB.gettrials(S) isa DataFrame
@test ANB.getlicks(S) isa DataFrame
@test ANB.getrewards(S) isa DataFrame
@test ANB.getstimuli(S) isa DataFrame
@test ANB.geteyetracking(S) isa DataFrame
end
# s3clear()
return
| AllenNeuropixelsBase | https://github.com/brendanjohnharris/AllenNeuropixelsBase.jl.git |
|
[
"MIT"
]
| 0.3.0 | 215ea07f170cd9732aa7d7745c672f69baf3dc02 | docs | 1091 | # AllenNeuropixelsBase
<!-- [](https://brendanjohnharris.github.io/AllenNeuropixelsBase.jl/stable/) -->
<!-- [](https://brendanjohnharris.github.io/AllenNeuropixelsBase.jl/dev/) -->
[](https://github.com/brendanjohnharris/AllenNeuropixelsBase.jl/actions/workflows/CI.yml?query=branch%3Amain)
[](https://codecov.io/gh/brendanjohnharris/AllenNeuropixelsBase.jl)
[](https://doi.org/10.5281/zenodo.10584983)
This package lets you load the Allen Neuropixels data in a Julia-oriented format, using e.g. [DataFrames](https://github.com/JuliaData/DataFrames.jl) and [DimArrays](https://github.com/rafaqz/DimensionalData.jl). Can load both the 'Visual Coding' and 'Visual Behavior' datasets.
| AllenNeuropixelsBase | https://github.com/brendanjohnharris/AllenNeuropixelsBase.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | code | 458 | using Documenter, ModiaResult, ModiaPlot_PyPlot
makedocs(
#modules = [ModiaResult],
sitename = "ModiaResult",
authors = "Martin Otter (DLR-SR)",
format = Documenter.HTML(prettyurls = false),
pages = [
"Home" => "index.md",
"Getting Started" => "GettingStarted.md",
"Functions" => "Functions.md",
"Abstract Interface" => "AbstractInterface.md",
"Internal" => "Internal.md",
]
)
| ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | code | 5186 | # License for this file: MIT (expat)
# Copyright 2021, DLR Institute of System Dynamics and Control (DLR-SR)
# Developer: Martin Otter, DLR-SR
#
# This file is part of module ModiaResult
"""
@enum ModiaResult.SignalType
Defines the type of the signal. Supported values:
- `ModiaResult.Independent`: Independent variable (usually the time signal).
- `ModiaResult.Continuous`: Piece-wise continuous signal (typically linearly interpolated).
- `ModiaResult.Clocked`: Clocked signal
(values are only defined at the corresponding `Time` signal time instants and have
no value in between; the latter might be signaled by piece-wise constant
dotted lines).
"""
@enum SignalType Independent=1 Continuous=2 Clocked=3
"""
(timeSignal, signal, signalType) = ModiaResult.rawSignal(result, name)
Given the result data structure `result` and a variable `name::AbstractString`,
return the result values of the independent variable (= `timeSignal`), the
corresponding result values of the variable (= `signal`) and the type
of the signal `signalType::`[`SignalType`](@ref)). Note, an error shall be raised,
if `name` is not known.
The following figure sketches the returned `timeSignal` and `signal` data structures:
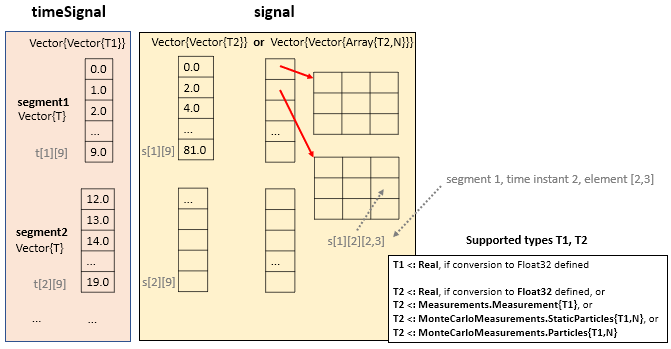
Other signal types might be mapped to this basic signal type by introducing views.
# Details of the return arguments
`timeSignal::Vector{Vector{T1}}`:
A result consists of one or more **segments**.
`timeSignal[i][j]` is the value of time instant `j` in segment `i`.
`timeSignal[i][:]` must have monotonically increasing values and
type `T1<:Real` must be a subtype of `Real` for which a conversion to `AbstractFloat`
is defined. For example, `T1::Rational` is fine, but `T1::Complex` is not allowed.
`signal::Vector{Vector{T2}}` or `signal::Vector{Vector{Array{T2,N}}}`:
`signal[i][j]` is the value of the variable at time instant `timeSignal[i][j]`.
This value can be a scalar or an array. Type `T2` can have one of the following values:
- `T2 <: Real`, must be a subtype of `Real` for which a conversion to `AbstractFloat`
is defined, or
- `T2 <: Measurements.Measurement{T1}`, or
- `T2 <: MonteCarloMeasurements.StaticParticles{T1,N}`, or
- `T2 <: MonteCarloMeasurements.Particles{T1,N}`.
If the signal is a constant with value `value`, return
`([[t_min, t_max]], [[value, value]], ModiaResult.Continuous)`.
If the signal is the time signal, return
`(timeSignal, timeSignal, ModiaResult.independent)`.
The `timeSignal` might be a dummy vector consisting of the first and last time point
in the result (if different timeSignals are present for different signals or
if the signal is constant).
`signal` and `timeSignal` may have units from package `Unitful`.
The information `signalType::SignalType` defines how the signal can be interpolated
and/or plotted.
"""
function rawSignal end
"""
ModiaResult.signalNames(result)
Return a string vector of the signal names that are present in result.
"""
function signalNames end
"""
ModiaResult.timeSignalName(result)
Return the name of the independent variable (typically: "time").
"""
function timeSignalName end
"""
ModiaResult.hasOneTimeSignal(result)
Return true if `result` has one time signal.
Return false, if `result` has two or more time signals.
"""
function hasOneTimeSignal end
"""
(signal, timeSignal, timeSignalName, signalType, arrayName,
arrayIndices, nScalarSignals) = getSignalDetails(result, name)
Return the signal defined by `name::AbstractString` as
`signal::Vector{Matrix{<:Real}}`.
`name` may include an array range, such as "a.b.c[2:3,5]".
In this case `arrayName` is the name without the array indices,
such as `"a.b.c"`, `arrayIndices` is a tuple with the array indices,
such as `(2:3, 5)` and `nScalarSignals` is the number of scalar
signals, such as `3` if arrayIndices = `(2:3, 5)`.
Otherwise `arrayName = name, arrayIndices=(), nScalarSignals=1`.
In case the signal is not known or `name` cannot be interpreted,
`(nothing, nothing, nothing, nothing, name, (), 0)` is returned.
It is required that the value of the signal at a time instant
has either `typeof(value) <: Real` or
`typeof(value) = AbstractArray{Real, N}`.
The following `Real` types are currently supported:
1. `convert(Float64, eltype(value)` is supported
(for example Float32, Float64, DoubleFloat, Rational, Int32, Int64, Bool).
2. Measurements.Measurement{<Type of (1)>}.
3. MonteCarloMeasurements.StaticParticles{<Type of (1)>}.
4. MonteCarloMeasurements.Particles{<Type of (1)>}.
"""
function getSignalDetails end
"""
ModiaResult.hasSignal(result, name)
Returns `true` if signal `name::AbstractString` is available in `result`.
"""
function hasSignal(result, name::AbstractString)::Bool
hasName = true
try
sigInfo = rawSignal(result,name)
catch
hasName = false
end
return hasName
end
"""
ModiaResult.defaultHeading(result)
Return default heading of result as a string
(can be used as default heading for a plot).
"""
defaultHeading(result) = ""
| ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | code | 14110 | # License for this file: MIT (expat)
# Copyright 2021, DLR Institute of System Dynamics and Control
#
# This file is part of module ModiaResult
#
# Functions that are exported from ModiaResult
import DataFrames
import Unitful
baseType(::Type{T}) where {T} = T
numberType(value) = baseType(eltype(value))
function ifNecessaryStripUnits(s1,s2)
if numberType(s1) <: Unitful.AbstractQuantity &&
!(numberType(s2) <: Unitful.AbstractQuantity)
# s1 has units and s2 has no units -> remove units in s1
s1 = Unitful.ustrip.(s1)
elseif !(numberType(s1) <: Unitful.AbstractQuantity) &&
numberType(s2) <: Unitful.AbstractQuantity
# s1 has no units and s2 has units -> remove units in s2
s2 = Unitful.ustrip.(s2)
end
return (s1,s2)
end
# Provide Vector type with one value and fixed length
struct OneValueVector{T} <: AbstractArray{T, 1}
value::T
nvalues::Int
OneValueVector{T}(value,nvalues) where {T} = new(value,nvalues)
end
OneValueVector(value,nvalues) = OneValueVector{typeof(value)}(value,nvalues)
Base.getindex(v::OneValueVector, i::Int) = v.value
Base.size(v::OneValueVector) = (v.nvalues,)
Base.IndexStyle(::Type{<:OneValueVector}) = IndexLinear()
interpolate(tsig, sig, isig, t) = begin
sig_ipo = sig[isig-1] + (sig[isig] - sig[isig-1])*((t - tsig[isig-1])/(tsig[isig] - tsig[isig-1]))
isfinite(sig_ipo) ? sig_ipo : sig[isig]
end
"""
(result1s, result2s, sameTimeRange) = makeSameTimeAxis(result1, result2;
names = missing,
timeName1 = "time",
timeName2 = "time")
The function makes the same time axis for the signals in result1 and result2 identified
by the signal `select::Vector{String}`. It is required that `result1` and `result2` support functions
- `hasSignal(result, name)`
- `rawSignal(result, name)`
- `names(result)`
and that the time axis is identified by name `timeName1` and `timeName2` respectively.
If `select == missing`, then the intersection of the `select` names of `result1` and of `result2`
is used (but without signals `timeName1`, `timeName2).
The function returns a dictionaries of type `DictionaryResult` of the signals
`select` that are both in `result1` and
in `result2` so that all signals have the same time axes.
Notes:
- If for example `select = ["n1", "n2", "n3", "n4"]` and `"n1"`, `"n3"` and `"n4"`are in `result1`
and `"n2", "n3", "n4"` are in `result2` then `result1s` and `result2s` contain names
`"n3", "n4"`.
- If additional time instants are introduced in a time axis, then the corresponding
signal values are computed by linear interpolation.
- If possible, **references** are returned and **not copies** of the signals (for example, if the
time axes of `result1` and `result2` are identical, then `result1s` is a reference of
`result1` and `result2s` is a reference of `result2`).
- If the first and last time point of result1 and result2 are identical,
then `sameTimeRange = true`. If this is not the case, `sameTimeRange = false` and
time vectors in `result1s, result2s` contain the time values
that are both in time vectors `result1` and `result2`.
If there is no common time range, an error occurs.
"""
function makeSameTimeAxis(result1, result2;
select = missing,
timeName1::String = "time",
timeName2::String = "time")
# Determine the names that are both in result1 and in result2
names_common::Vector{String} = ismissing(select) ?
setdiff(intersect(names(result1), names(result2)), [timeName1, timeName2]) :
intersect(select, names(result1), names(result2))
if length(names_common) == 0
@error "result1 and result2 have no names in common from $names"
end
# Check that timeName1 and timeName2 are in the results
if !hasSignal(result1, timeName1)
@error "result1 has no signal with name $timeName1"
elseif !hasSignal(result2, timeName2)
@error "result2 has no signal with name $timeName2"
end
# Get time axes
(t1, t1b, t1Name, ipo1) = rawSignal(result1, timeName1)
(t2, t2b, t2Name, ipo2) = rawSignal(result2, timeName2)
if length(t1) != 1
@error "Only one segment is currently supported. Signal $timeName1 has " * length(t1) * " segments."
elseif length(t2) != 1
@error "Only one segment is currently supported. Signal $timeName2 has " * length(t2) * " segments."
end
t1 = t1[1]
t2 = t2[1]
if !(typeof(t1) <: AbstractVector)
type_t1 = typeof(t1)
@error "The time signal $timeName1 of result1 is no vector (has type $type_t1)"
elseif !(typeof(t2) <: AbstractVector)
type_t2 = typeof(t2)
@error "The time signal $timeName2 of result2 is no vector (has type $type_t2)"
end
(t1,t2) = ifNecessaryStripUnits(t1,t2)
# Generate output DataFrames
result1s = DataFrames.DataFrame()
result2s = DataFrames.DataFrame()
# Handle case, if the time axes are the same
if t1 == t2
nt = length(t1)
(tt1, tt1b, tt1Name, dummy) = rawSignal(result1, timeName1)
if length(tt1) != length(t1)
@error "Only one time signal is currently supported, but $result1 has several time signals."
end
result1s[!,timeName1] = tt1
(tt2, tt2b, tt2Name, dummy) = rawSignal(result2, timeName2)
if length(tt2) != length(t2)
@error "Only one time signal is currently supported, but $result2 has several time signals."
end
result2s[!,timeName2] = tt2
for name in names_common
(sig1, tt1c, tt1cName, sigIpo1) = rawSignal(result1, name)
result1s[!,name] = sig1
(sig2, tt2c, ttt2Name, sigIpo2) = rawSignal(result2, name)
result2s[!,name] = sig2
end
return (result1s, result2s, true)
end
# Determine common time range
nt1 = length(t1)
nt2 = length(t2)
if t1[end] < t2[1] || t1[1] > t2[end]
t1_begin = t1[1]
t1_end = t1[end]
t2_begin = t2[1]
t2_end = t2[end]
@error "result1 has time range [$t1_begin,$t1_end] and result2 has time range [$t1_begin,$t1_end]"
end
if t1[1] <= t2[1]
i1_begin = findlast(v -> v <= t2[1], t1)
i2_begin = 1
t_begin = t2[1]
else
i2_begin = findlast(v -> v <= t1[1], t2)
i1_begin = 1
t_begin = t1[1]
end
# Allocate memory for common time axis
nt = nt1 + nt2
t_common = similar(t1, promote_type(eltype(t1), eltype(t2)), nt)
t = t_begin
i1 = i1_begin
i2 = i2_begin
i = 1
while true
t_common[i] = t
if t >= t1[i1]
i1 += 1
end
if t >= t2[i2]
i2 += 1
end
i += 1
if i > nt
break
elseif i1 > nt1 || i2 > nt2
deleteat!(t_common, i:nt)
break
end
t = t1[i1] <= t2[i2] ? t1[i1] : t2[i2]
end
result1s[!,timeName1] = t_common
result2s[!,timeName2] = t_common
nt = length(t_common)
sameTimeRange = t1[1] == t2[1] && t1[end] == t2[end]
# Make same time axis
for name in names_common
# Allocate memory for signals in result1s, result2s
(sig1, t1, t1Name, ipo1) = rawSignal(result1, name)
(sig2, t2, t2Name, ipo2) = rawSignal(result2, name)
if length(sig1) == 0
@error "$name in result1 has no values"
end
if length(sig2) == 0
@error "$name in result2 has no values"
end
if typeof(sig1[1]) <: Number && typeof(sig2[1]) <: Number
sig1_common = similar(sig1, promote_type(eltype(sig1), eltype(sig2)), nt)
elseif typeof(sig1[1]) <: AbstractArray && typeof(sig2[1]) <: AbstractArray
if size(sig1[1]) != size(sig2[1])
size1 = size(sig1[1])
size2 = size(sig2[1])
@error "$name array in result1 has element size $size1 and in result2 element size $size2"
end
sig1_common = similar(sig1, Array{promote_type(eltype(sig1[1]), eltype(sig2[1])), ndims(sig1[1])}, nt)
else
type1 = typeof(sig1[1])
type2 = typeof(sig2[1])
@error "$name in result1 has element type $type1 and in result2 element type $type2"
end
sig2_common = similar(sig1_common)
# Make same time axis for signals sig1 and sig2
t = t_begin
i = 1
i1 = i1_begin
i2 = i2_begin
while true
#println("... i = $i, i1 = $i1, i2 = $i2, t = $t, t1[i1] = ", t1[i1], ", t2[i2] = ", t2[i2])
if t < t1[i1]
sig1_common[i] = interpolate(t1,sig1,i1,t)
else
sig1_common[i] = sig1[i1]
i1 += 1
end
if t < t2[i2]
sig2_common[i] = interpolate(t2,sig2,i2,t)
else
sig2_common[i] = sig2[i2]
i2 += 1
end
i += 1
if i > nt
break
end
t = t1[i1] <= t2[i2] ? t1[i1] : t2[i2]
end
result1s[!,name] = sig1_common
result2s[!,name] = sig2_common
end
return (result1s, result2s, sameTimeRange)
end
"""
(success, diff, diff_names, max_error, within_tolerance) =
compareResults(result, reference;
tolerance = 1e-3,
names = missing,
timeResult = "time",
timeReference = "time")
Compare the signals identified by `names::Vector{String}` in `result`
with the reference reults `reference` using the relative `tolerance`.
The time axis is identified by name `timeResult` and `timeReference` respectively.
If `names == missing`, then the intersection of the `names` of `result` and of `reference`
is used (but without signals `timeResult`, `timeReference).
Input arguments `result`, `reference` can be dictionaries, DataFrames or
objects that support functions
- `ModiaPlot.hasSignal(result, name)`
- `rawSignal(result, name)`
- `names(result)`
# Output arguments
- `success::Bool`: = true, if all compared signals are the same within the given tolerance (see below),.
- `diff::DataFrame`: The difference of the compared signals (using `timeResult` as time-axis).
- `diff_names::Vector{String}`: The names of the signals that are compared.
- `max_error::Vector{Float64}`: max_error[i] is the maximum error in signal of diff_names[i].
- `within_tolerance::BitVector`: withinTolerance[i] = true, if signal of diff_names[i] is within the tolerance (see below).
# Computation of the outputs
Comparison is made in the following way (assuming `result` and `reference`
have the same time axis and are DataFrames objects):
```julia
smallestNominal = 1e-10
nt = DataFrames.nrow(reference)
for (i,name) in enumerate(diff_names)
diff[i] = result[!,name] - reference[!,name]
max_error[i] = maximum( abs.(result[!,name] - reference[!,name]) )
nominal[i] = max( sum( abs.(reference[!,name])/nt ), smallestNominal )
within_tolerance[i] = max_error[i] <= nominal[i]*tolerance
end
success = all(within_tolerance)
```
# Notes
Before the comparison, the function makes the same time axis for the signals in
`result` and `reference` and selects the maximum time range that is both in `result` and in
`reference`. If additional time instants are introduced in a time axis,
then the corresponding signal values are computed by linear interpolation.
This linear interpolation can introduce a significant error.
It is therefore highly recommended to use the same time axis.
"""
function compareResults(result, reference;
tolerance::Float64 = 1e-3,
names::Union{Missing,Vector{String}} = missing,
timeResult::String = "time",
timeReference::String = "time")
# Check tolerance
if tolerance <= 0.0
@error "compareResults: Input argument tolerance = $tolerance <= 0.0"
end
# Make same time axis
(result1s, result2s) = makeSameTimeAxis(result, reference;
names = names,
timeName1 = timeResult,
timeName2 = timeReference)
# Compute difference and tolerance
diff_names = setdiff(DataFrames.names(result1s), [timeResult])
nnames = length(diff_names)
diff = DataFrames.DataFrame()
diff[!,timeResult] = result1s[!,timeResult]
smallestNominal = 1e-10
nt = DataFrames.nrow(result1s)
max_error = zeros(nnames)
nominal = zeros(nnames)
within_tolerance = fill(false, nnames)
for (i,name) in enumerate(diff_names)
s1 = result1s[!,name]
s2 = result2s[!,name]
(s1,s2) = ifNecessaryStripUnits(s1,s2)
# Difference of the signals
diff[!,name] = s1 - s2
# Error
max_error[i] = Unitful.ustrip.( maximum( abs.(s1 - s2) ) )
nominal[i] = max( Unitful.ustrip(sum( abs.(s2)/nt )), smallestNominal )
within_tolerance[i] = max_error[i] <= nominal[i]*tolerance
end
success = all(within_tolerance)
return (success, diff, diff_names, max_error, within_tolerance)
end
| ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | code | 269 | module ModiaResult
const path = dirname(dirname(@__FILE__))
include("ResultViews.jl")
include("AbstractInterface.jl")
include("NoPlot.jl")
include("SilentNoPlot.jl")
include("Utilities.jl")
include("OverloadedMethods.jl")
#include("CompareResults.jl")
end # module
| ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | code | 1044 | # License for this file: MIT (expat)
# Copyright 2021, DLR Institute of System Dynamics and Control
module NoPlot
include("plot.jl")
plot(result, names::AbstractMatrix; heading::AbstractString="", grid::Bool=true, xAxis="time",
figure::Int=1, prefix::AbstractString="", reuse::Bool=false, maxLegend::Integer=10,
minXaxisTickLabels::Bool=false, MonteCarloAsArea=false) =
println("... plot(..): Call is ignored, because of usePlotPackage(\"NoPlot\").")
showFigure(figure::Int) = println("... showFigure($figure): Call is ignored, because of usePlotPackage(\"NoPlot\").")
closeFigure(figure::Int) = println("... closeFigure($figure): Call is ignored, because of usePlotPackage(\"NoPlot\").")
saveFigure(figure::Int, fileName::AbstractString) = println("... saveFigure($figure,\"$fileName\"): Call is ignored, because of usePlotPackage(\"NoPlot\").")
"""
closeAllFigures()
Close all figures.
"""
closeAllFigures() = println("... closeAllFigures(): Call is ignored, because of usePlotPackage(\"NoPlot\").")
end | ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | code | 3553 | # License for this file: MIT (expat)
# Copyright 2021, DLR Institute of System Dynamics and Control
# Developer: Martin Otter, DLR-SR
#
# This file is part of module ModiaResult
#
# Overloaded ModiaResult methods for
# - AbstractDict{String,T}
# - DataFrames
# - Tables
# - ModiaResult.ResultDict
import ModiaResult
import DataFrames
import Tables
import OrderedCollections
# Overloaded methods for AbstractDict{String,T}
ModiaResult.rawSignal( result::AbstractDict{T1,T2}, name::String) where {T1<:AbstractString,T2} = ([result["time"]], [result[name]],
name == "time" ? ModiaResult.Independent : ModiaResult.Continuous)
ModiaResult.signalNames( result::AbstractDict{T1,T2}) where {T1<:AbstractString,T2} = collect(keys(result))
ModiaResult.timeSignalName( result::AbstractDict{T1,T2}) where {T1<:AbstractString,T2} = "time"
ModiaResult.hasOneTimeSignal(result::AbstractDict{T1,T2}) where {T1<:AbstractString,T2} = true
ModiaResult.hasSignal( result::AbstractDict{T1,T2}, name::String) where {T1<:AbstractString,T2} = haskey(result, name)
# Overloaded methods for ModiaResult.ResultDict
ModiaResult.rawSignal( result::ResultDict, name::String) = result.dict[name]
ModiaResult.signalNames( result::ResultDict) = collect(keys(result.dict))
ModiaResult.timeSignalName( result::ResultDict) = "time"
ModiaResult.hasOneTimeSignal(result::ResultDict) = result.hasOneTimeSignal
ModiaResult.hasSignal( result::ResultDict, name::String) = haskey(result.dict, name)
ModiaResult.defaultHeading( result::ResultDict) = result.defaultHeading
# Overloaded methods for DataFrames
ModiaResult.timeSignalName( result::DataFrames.DataFrame) = DataFrames.names(result, 1)[1]
ModiaResult.hasOneTimeSignal(result::DataFrames.DataFrame) = true
ModiaResult.rawSignal( result::DataFrames.DataFrame, name::AbstractString) = ([result[!,1]], [result[!,name]], name == timeSignalName(result) ? ModiaResult.Independent : ModiaResult.Continuous)
ModiaResult.signalNames( result::DataFrames.DataFrame) = DataFrames.names(result)
# Overloaded methods for Tables
function ModiaResult.rawSignal(result, name::AbstractString)
if Tables.istable(result) && Tables.columnaccess(result)
return ([Tables.getcolumn(result, 1)], [Tables.getcolumn(result, Symbol(name))], string(Tables.columnnames(result)[1]) == name ? ModiaResult.Independent : ModiaResult.Continuous)
else
@error "rawSignal(result, \"$name\") is not supported for typeof(result) = " * string(typeof(result))
end
end
function ModiaResult.signalNames(result)
if Tables.istable(result) && Tables.columnaccess(result)
return string.(Tables.columnnames(result))
else
@error "signalNames(result) is not supported for typeof(result) = " * string(typeof(result))
end
end
function ModiaResult.timeSignalName(result)
if Tables.istable(result) && Tables.columnaccess(result)
return string(Tables.columnnames(result)[1])
else
@error "timeSignalName(result) is not supported for typeof(result) = " * string(typeof(result))
end
end
function ModiaResult.hasOneTimeSignal(result)
if Tables.istable(result) && Tables.columnaccess(result)
return true
else
@error "hasOneTimeSignal(result) is not supported for typeof(result) = " * string(typeof(result))
end
end
| ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | code | 3788 | using Unitful
"""
vec = OneValueVector(value,nvalues)
Provide a vector view of one value.
# Example
```julia
vec1 = OneValueVector(2.0, 10) # = Vector{Float64} with length(vec) = 10
vec2 = OneValueVector(true, 4) # = Vector{Bool} with length(vec) = 4
```
"""
struct OneValueVector{T} <: AbstractVector{T}
value::T
nvalues::Int
OneValueVector{T}(value,nvalues) where {T} = new(value,nvalues)
end
OneValueVector(value,nvalues) = OneValueVector{typeof(value)}(value,nvalues)
Base.getindex(v::OneValueVector, i::Int) = v.value
Base.size(v::OneValueVector) = (v.nvalues,)
Base.IndexStyle(::Type{<:OneValueVector}) = IndexLinear()
struct FlattendVector{T} <: AbstractVector{T}
vectorOfVector::Vector{T}
ibeg::Int # start index
iend::Int # end index
end
Base.getindex(v::FlattendVector, i::Int) = view(v.vectorOfVector[i], v.ibeg:v.iend)
Base.size( v::FlattendVector) = (length(v.vectorOfVector), )
Base.IndexStyle(::Type{<:FlattendVector}) = IndexLinear()
"""
signal = SignalView(result,signalIndex,negate)
Return a view of signal `result[ti][signalIndex]` where `ti` is the index
of the time instant and `signalIndex` is the index of the variable.
If negate=true, negate the signal values.
```julia
signal[ti] = negate ? -result[ti][signalIndex] : result[ti][signalIndex]
```
"""
struct SignalView{T} <: AbstractVector{T}
result
signalIndex::Int
negate::Bool
SignalView{T}(result,signalIndex,negate) where {T} = new(result,signalIndex,negate)
end
SignalView(result,signalIndex,negate) = SignalView{typeof(result[1][signalIndex])}(result,signalIndex,negate)
Base.getindex(signal::SignalView, ti::Int) = signal.negate ? -signal.result[ti][signal.signalIndex] : signal.result[ti][signal.signalIndex]
Base.size( signal::SignalView) = (length(signal.result),)
Base.IndexStyle(::Type{<:SignalView}) = IndexLinear()
"""
signal = FlattenedSignalView(result,signalStartIndex,signalSize,negate)
Return a view of flattened signal `result[ti][signalStartIndex:signalEndIndex]`
where `ti` is the index of the time instant and the signal of size `signalSize` has been
flattened into a vector (`signalEndIndex = signalStartIndex + prod(signalSize) - 1`).
If negate=true, negate the signal values.
```julia
baseSignal = reshape(result[ti][signalStartIndex:signalStartIndex+prod(signalSize)-1], signalSize)
signal[ti] = negate ? -baseSignal : baseSignal
```
"""
struct FlattenedSignalView{T} <: AbstractVector{T}
result
signalStartIndex::Int
signalEndIndex::Int
signalSize::Tuple
negate::Bool
FlattenedSignalView{T}(result,signalStartIndex,signalSize,negate) where {T} =
new(result,signalStartIndex,signalStartIndex+prod(signalSize)-1,signalSize,negate)
end
FlattenedSignalView(result,signalStartIndex,signalSize,negate) = FlattenedSignalView{typeof(result[1][signalStartIndex])}(result,signalStartIndex,signalSize,negate)
Base.getindex(signal::FlattenedSignalView, ti::Int) = signal.signalSize == () ?
(signal.negate ? -signal.result[ti][signal.signalStartIndex]
: signal.result[ti][signal.signalStartIndex]) :
(signal.negate ? -reshape(signal.result[ti][signal.signalStartIndex:signal.signalEndIndex],signal.signalSize) :
reshape(signal.result[ti][signal.signalStartIndex:signal.signalEndIndex],signal.signalSize))
Base.size( signal::FlattenedSignalView) = (length(signal.result),)
Base.IndexStyle(::Type{<:FlattenedSignalView}) = IndexLinear()
| ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | code | 612 | # License for this file: MIT (expat)
# Copyright 2021, DLR Institute of System Dynamics and Control
module SilentNoPlot
include("plot.jl")
plot(result, names::AbstractMatrix; heading::AbstractString="", grid::Bool=true, xAxis="time",
figure::Int=1, prefix::AbstractString="", reuse::Bool=false, maxLegend::Integer=10,
minXaxisTickLabels::Bool=false, MonteCarloAsArea=false) = nothing
showFigure(figure::Int) = nothing
closeFigure(figure::Int) = nothing
saveFigure(figure::Int, fileName::AbstractString) = nothing
"""
closeAllFigures()
Close all figures.
"""
closeAllFigures() = nothing
end | ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | code | 27390 | # License for this file: MIT (expat)
# Copyright 2020, DLR Institute of System Dynamics and Control
# Developer: Martin Otter, DLR-SR
#
# This file is part of module ModiaResult
#
# Utility functions that are usually not directly called.
using Unitful
import OrderedCollections
import DataFrames
import Measurements
import MonteCarloMeasurements
import Pkg
isinstalled(pkg::String) = any(x -> x.name == pkg && x.is_direct_dep, values(Pkg.dependencies()))
const AvailableModiaPlotPackages = ["GLMakie", "WGLMakie", "CairoMakie", "PyPlot", "NoPlot", "SilentNoPlot"]
const ModiaPlotPackagesStack = String[]
"""
usePlotPackage(plotPackage::String)
Define the ModiaPlot package that shall be used by command `ModiaResult.@usingModiaPlot`.
If a ModiaPlot package is already defined, save it on an internal stack
(can be reactivated with `usePreviousPlotPackage()`.
Possible values for `plotPackage`:
- `"GLMakie"`
- `"WGLMakie"`
- `"CairoMakie"`
- `"PyPlot"`
- `"NoPlot"`
- `"SilentNoPlot"`
# Example
```julia
import ModiaResult
ModiaResult.usePlotPackage("GLMakie")
module MyTest
ModiaResult.@usingModiaPlot
t = range(0.0, stop=10.0, length=100)
result = Dict{String,Any}("time" => t, "phi" => sin.(t))
plot(result, "phi") # use GLMakie for the rendering
end
```
"""
function usePlotPackage(plotPackage::String; pushPreviousOnStack=true)::Bool
success = true
if plotPackage == "NoPlot" || plotPackage == "SilentNoPlot"
if pushPreviousOnStack && haskey(ENV, "MODIA_PLOT")
push!(ModiaPlotPackagesStack, ENV["MODIA_PLOT"])
end
if plotPackage == "NoPlot"
ENV["MODIA_PLOT"] = "NoPlot"
else
ENV["MODIA_PLOT"] = "SilentNoPlot"
end
else
plotPackageName = "ModiaPlot_" * plotPackage
if plotPackage in AvailableModiaPlotPackages
# Check that plotPackage is defined in current environment
if isinstalled(plotPackageName)
if pushPreviousOnStack && haskey(ENV, "MODIA_PLOT")
push!(ModiaPlotPackagesStack, ENV["MODIA_PLOT"])
end
ENV["MODIA_PLOT"] = plotPackage
else
@warn "... usePlotPackage(\"$plotPackage\"): Call ignored, since package $plotPackageName is not in your current environment"
success = false
end
else
@warn "\n... usePlotPackage(\"$plotPackage\"): Call ignored, since argument not in $AvailableModiaPlotPackages."
success = false
end
end
return success
end
"""
usePreviousPlotPackage()
Pop the last saved ModiaPlot package from an internal stack
and call `usePlotPackage(<popped ModiaPlot package>)`.
"""
function usePreviousPlotPackage()::Bool
if length(ModiaPlotPackagesStack) > 0
plotPackage = pop!(ModiaPlotPackagesStack)
success = usePlotPackage(plotPackage, pushPreviousOnStack=false)
else
@warn "usePreviousPlotPackage(): Call ignored, because nothing saved."
success = false
end
return success
end
"""
currentPlotPackage()
Return the name of the plot package as a string that was
defined with [`usePlotPackage`](@ref).
For example, the function may return "GLMakie", "PyPlot" or "NoPlot" or
or "", if no PlotPackage is defined.
"""
currentPlotPackage() = haskey(ENV, "MODIA_PLOT") ? ENV["MODIA_PLOT"] : ""
"""
@usingModiaPlot()
Execute `using XXX`, where `XXX` is the ModiaPlot package that was
activated with `usePlotPackage(plotPackage)`.
"""
macro usingModiaPlot()
if haskey(ENV, "MODIA_PLOT")
ModiaPlotPackage = ENV["MODIA_PLOT"]
if !(ModiaPlotPackage in AvailableModiaPlotPackages)
@warn "ENV[\"MODIA_PLOT\"] = \"$ModiaPlotPackage\" is not supported!. Using \"NoPlot\"."
@goto USE_NO_PLOT
elseif ModiaPlotPackage == "NoPlot"
@goto USE_NO_PLOT
elseif ModiaPlotPackage == "SilentNoPlot"
expr = :( import ModiaResult.SilentNoPlot: plot, showFigure, saveFigure, closeFigure, closeAllFigures )
return esc( expr )
else
ModiaPlotPackage = Symbol("ModiaPlot_" * ModiaPlotPackage)
expr = :(using $ModiaPlotPackage)
println("$expr")
return esc( :(using $ModiaPlotPackage) )
end
else
@warn "No plot package activated. Using \"NoPlot\"."
@goto USE_NO_PLOT
end
@label USE_NO_PLOT
expr = :( import ModiaResult.NoPlot: plot, showFigure, saveFigure, closeFigure, closeAllFigures )
println("$expr")
return esc( expr )
end
const signalTypeToString = ["Independent", "Continuous", "Clocked"]
"""
resultInfo(result)
Return information about the result as DataFrames.DataFrame object
with columns:
```julia
name::String, unit::String, nTime::String, signalType::String, valueSize::String, eltype::String
```
"""
function resultInfo(result)
if isnothing(result)
@info "The call of showInfo(result) is ignored, since the argument is nothing."
return
end
name2 = String[]
unit2 = String[]
nTime2 = String[]
signalType2 = String[]
valueSize2 = String[]
eltype2 = String[]
timeSigName = timeSignalName(result)
for name in signalNames(result)
(signalType, nTime, valueSize, elType, sigUnit, oneSigValue) = signalInfo2(result, name)
if isnothing(elType)
sigUnit3 = "???"
nTime3 = "???"
signalType3 = "???"
valueSize3 = "???"
eltype3 = "???"
else
sigUnit3 = sigUnit isa Nothing ? "???" : string(sigUnit)
nTime3 = name==timeSigName && !hasOneTimeSignal(result) ? "---" : (oneSigValue ? string(nTime)*"*" : string(nTime))
signalType3 = signalTypeToString[Int(signalType)]
valueSize3 = valueSize isa Nothing ? "()" : string(valueSize)
eltype3 = string(elType)
end
if signalType3 == "Independent"
pushfirst!(name2 , name)
pushfirst!(unit2 , sigUnit3)
pushfirst!(nTime2 , nTime3)
pushfirst!(signalType2, signalType3)
pushfirst!(valueSize2 , valueSize3)
pushfirst!(eltype2 , eltype3)
else
push!(name2 , name)
push!(unit2 , sigUnit3)
push!(nTime2 , nTime3)
push!(signalType2, signalType3)
push!(valueSize2 , valueSize3)
push!(eltype2 , eltype3)
end
end
resultInfoTable = DataFrames.DataFrame(name=name2, unit=unit2, nTime=nTime2, signalType=signalType2, valueSize=valueSize2, eltype=eltype2)
return resultInfoTable
end
"""
printResultInfo(result)
Print info about result.
# Example
```julia
using ModiaResult
using Unitful
ModiaResult.@usingModiaPlot
t = range(0.0, stop=10.0, length=100)
result = OrderedDict{String,Any}("time"=> t*u"s",
"phi" => sin.(t)*u"rad",
"A" => OneValueVector(2.0, length(t)))
printResultInfo(result)
# Gives output:
# │ name unit nTime signalType valueSize eltype
───┼───────────────────────────────────────────────────
1 │ time s 100 Independent () Float64
2 │ phi rad 100 Continuous () Float64
3 | A 100* Continuous () Float64
*: Signal stored as ModiaResult.OneValueVector (e.g. parameter)
```
"""
function printResultInfo(result)::Nothing
resultInfoTable = resultInfo(result)
show(stdout, resultInfoTable, summary=false, rowlabel=Symbol("#"), allcols=true, eltypes=false, truncate=50)
println(stdout)
println("*: Signal stored as ModiaResult.OneValueVector (e.g. parameter)\n")
return nothing
end
"""
ResultDict(args...; defaultHeading="", hasOneTimeSignal=true)
Return a new ResultDict dictionary (is based on OrderedCollections.OrderedDict).
- A key of the dictionary is a String. Key `"time"` characterizes the
independent variable.
- A value of the dictionary is a tuple `(timeSignal, signal, signalType)`
where `timeSignal::Vector{AbstractVector}`,
`signal::Vector{AbstractVector}` and
`signalType::ModiaResult.SignalType.
`signal[i][j]` is the signalValue at time instant `timeSignal[i][j]` in segment `i`.
# Example
```julia
using ModiaResult
time0 = [0.0, 7.0]
t = ([time0], [time0], ModiaResult.Independent)
time1 = 0.0 : 0.1 : 2.0
time2 = 3.0 : 0.01 : 3.5
time3 = 5.0 : 0.1 : 7.0
sigA1 = sin.(time1)u"m"
sigA2 = cos.(time2)u"m"
sigA3 = sin.(time3)u"m"
sigA = ([time1, time2, time3],
[sigA1, sigA2, sigA3 ],
ModiaResult.SignalType)
sigB = ([time2], [sin.(time2)], ModiaResult.SignalType)
sigC = ([time3], [sin.(time3)], ModiaResult.Clocked)
result = ModiaResult.ResultDict("time" => t,
"sigA" => sigA,
"sigB" => sigB,
"sigC" => sigC,
defaultHeading = "Three test signals",
hasOneTimeSignal = false)
showInfo(result)
```
"""
struct ResultDict <: AbstractDict{String,Tuple{Any,Any,SignalType}}
dict::OrderedCollections.OrderedDict{String,Tuple{Any,Any,SignalType}}
defaultHeading::String
hasOneTimeSignal::Bool
ResultDict(args...; defaultHeading="", hasOneTimeSignal=true) =
new(OrderedCollections.OrderedDict{String,Tuple{Any,Any,SignalType}}(args...),
defaultHeading, hasOneTimeSignal)
end
#new(OrderedCollections.OrderedDict{String,Tuple{Vector{AbstractVector},
# Vector{AbstractVector},
# ModiaResult.SignalType}}(args...),
# Overload AbstractDict methods
Base.haskey(result::ResultDict, key) = Base.haskey(result.dict, key)
Base.get(result::ResultDict, key, default) = Base.get(result.dict, key, default)
Base.get(f::Function, result::ResultDict, key) = Base.get(f, result.dict, key)
Base.get!(result::ResultDict, key, default) = Base.get!(result.dict, key, default)
Base.get!(f::Function, result::ResultDict, key) = Base.get!(f, result.dict, key)
Base.getkey(result::ResultDict, key, default) = Base.getkey(result.dict, key, default)
Base.delete!(result::ResultDict, key) = Base.delete!(result.dict, key)
Base.keys(result::ResultDict) = Base.keys(result.dict)
Base.pop!(result::ResultDict, key) = Base.pop!(result.dict, key)
Base.pop!(result::ResultDict, key, default) = Base.pop!(result.dict, key, default)
Base.setindex!(result::ResultDict, value, key...) = Base.setindex!(result.dict, value, key...)
Base.values(result::ResultDict) = Base.values(result.dict)
"""
signalLength(signal)
Return the total number of values of `signal::Vector{AbstractVector}`.
If signal[i] is nothing or missing, a length of zero is returned.
"""
function signalLength(signal::AbstractVector)
for s in signal
if ismissing(s) || isnothing(s)
return 0
end
end
return sum( length(s) for s in signal )
end
"""
hasSameSegments(signal1, signal2)
Return true, if the lengths of the segments in `signal1` and in `signal2` are the same.
"""
function hasSameSegments(signal1::Vector{AbstractVector}, signal2::Vector{AbstractVector})
if length(signal1) != length(signal2)
return false
end
for i = 1:length(signal1)
if length(signal1[i]) != length(signal2[i])
return false
end
end
return true
end
"""
hasDimensionMismatch(signal, timeSignal, timeSignalName)
Print a warning message if signalLength(signal) != signalLength(timeSignal)
and return true. Otherwise, return false
"""
function hasDimensionMismatch(signal, signalName, timeSignal, timeSignalName::AbstractString)
if signalLength(signal) != signalLength(timeSignal)
lensignal = signalLength(signal)
lentime = signalLength(timeSignal)
@warn "signalLength of \"$signalName\" = $lensignal but signalLength of \"$timeSignalName\" = $lentime"
return true
end
return false
end
"""
(sigType, nTime, sigSize, sigElType, sigUnit) = signalInfo(result, name)
Return information about a signal, given the `name` of the signal in `result`:
- `sigType::SignalType`: Ìnterpolation type of signal.
- `nTime::Int`: Number of signal time points.
- `sigSize`: size(signal[1][1])
- `sigElType`: ustrip( eltype(signal[1][1]) ), that is the element type of the signal without unit.
- `sigUnit`: Unit of signal
If `name` is defined, but no signal is available (= nothing, missing or zero length),
return `nTime=0` and `nothing` for `sigSize, sigElType, sigUnit`.
"""
function signalInfo(result, name::AbstractString)
(sigType, nTime, valueSize, valueElType, valueUnit, oneSigValue) = signalInfo2(result,name)
return (sigType, nTime, valueSize, valueElType, valueUnit)
end
"""
(sigType, nTime, sigSize, sigElType, sigUnit, oneSigValue) = signalInfo2(result, name)
Return information about a signal, given the `name` of the signal in `result`.
The difference to `signalInfo(..)` is that additionally the information is returned,
whether the signals consists only of one value.
- `sigType::SignalType`: Ìnterpolation type of signal.
- `nTime::Int`: Number of signal time points.
- `sigSize`: size(signal[1][1])
- `sigElType`: ustrip( eltype(signal[1][1]) ), that is the element type of the signal without unit.
- `sigUnit`: Unit of signal
- `oneSigValue`: = true, at all time instants, the signal has identical values (e.g. if parameter defined with OneValueVector).
= false, signal has potentially different values at different time instants (which might be an array
If `name` is defined, but no signal is available (= nothing, missing or zero length),
return `nTime=0` and `nothing` for `sigSize, sigElType, sigUnit, oneSigValue`.
"""
function signalInfo2(result, name::AbstractString)
(timeSignal, signal, sigType) = rawSignal(result,name)
if ismissing(signal) || isnothing(signal) || !(typeof(signal) <: AbstractArray) || signalLength(signal) == 0
hasDimensionMismatch(signal, name, timeSignal, timeSignalName(result))
return (sigType, 0, nothing, nothing, nothing, nothing)
end
oneSigValue = length(signal) == 1 && typeof(signal[1]) <: OneValueVector
value = signal[1][1]
if value isa Number || value isa AbstractArray
valueSize = size(value)
valueUnit = unit(value[1])
else
hasDimensionMismatch(signal, name, timeSignal, timeSignalName(result))
return (sigType, signalLength(timeSignal), nothing, typeof(value), nothing, oneSigValue)
end
if typeof(value) <: MonteCarloMeasurements.Particles
elTypeAsString = string(typeof(ustrip.(value[1])))
nparticles = length(value)
valueElType = "MonteCarloMeasurements.Particles{" * elTypeAsString * ",$nparticles}"
elseif typeof(value) <: MonteCarloMeasurements.StaticParticles
elTypeAsString = string(typeof(ustrip.(value[1])))
nparticles = length(value)
valueElType = "MonteCarloMeasurements.StaticParticles{" * elTypeAsString * ",$nparticles}"
else
valueElType = typeof( ustrip.(value) )
end
nTime = signalLength(timeSignal)
return (sigType, nTime, valueSize, valueElType, valueUnit, oneSigValue)
end
# Default implementation of getSignalDetails
function getSignalDetails(result, name::AbstractString)
sigPresent = false
if hasSignal(result, name)
(timeSig, sig2, sigType) = rawSignal(result, name)
timeSigName = timeSignalName(result)
if !( isnothing(sig2) || ismissing(sig2) || signalLength(sig2) == 0 ||
hasDimensionMismatch(sig2, name, timeSig, timeSigName) )
sigPresent = true
value = sig2[1][1]
if ndims(value) == 0
sig = sig2
arrayName = name
arrayIndices = ()
nScalarSignals = 1
else
arrayName = name
arrayIndices = Tuple(1:Int(ni) for ni in size(value))
nScalarSignals = length(value)
sig = Vector{Matrix{eltype(value)}}(undef, length(sig2))
for segment = 1:length(sig2)
sig[segment] = zeros(eltype(value), length(sig2[segment]), nScalarSignals)
siga = sig[segment]
sig2a = sig2[segment]
for (i, value_i) in enumerate(sig2a)
for j in 1:nScalarSignals
siga[i,j] = sig2a[i][j]
end
end
end
end
end
else
# Handle signal arrays, such as a.b.c[3] or a.b.c[2:3, 1:5, 3]
if name[end] == ']'
i = findlast('[', name)
if i >= 2
arrayName = name[1:i-1]
indices = name[i+1:end-1]
if hasSignal(result, arrayName)
(timeSig, sig2, sigType) = rawSignal(result, arrayName)
timeSigName = timeSignalName(result)
if !( isnothing(sig2) || ismissing(sig2) || signalLength(sig2) == 0 ||
hasDimensionMismatch(sig2, arrayName, timeSig, timeSigName) )
sigPresent = true
value = sig2[1][1]
# Determine indices as tuple
arrayIndices = eval( Meta.parse( "(" * indices * ",)" ) )
# Determine number of signals
#nScalarSignals = sum( length(indexRange) for indexRange in arrayIndices )
# Extract sub-matrix
sig = Vector{Any}(undef,length(sig2))
for segment = 1:length(sig2)
sig2a = sig2[segment]
sig[segment] = [getindex(sig2a[i], arrayIndices...) for i in eachindex(sig2a)]
end
# Determine number of signals
nScalarSignals = length(sig[1][1])
# "flatten" array to matrix
eltypeValue = eltype(value)
if !(eltypeValue <: Number)
@warn "eltype($name) = $eltypeValue and this is not <: Number!"
return (nothing, nothing, nothing, nothing, name, (), 0)
end
for segment = 1:length(sig2)
sig[segment] = zeros(eltypeValue, length(sig2[segment]), nScalarSignals)
siga = sig[segment]
sig2a = sig2[segment]
for (i, value_i) in enumerate(sig2a)
for j in 1:nScalarSignals
siga[i,j] = sig2a[i][j]
end
end
end
end
end
end
end
end
if sigPresent
return (sig, timeSig, timeSigName, sigType, arrayName, arrayIndices, nScalarSignals)
else
return (nothing, nothing, nothing, nothing, name, (), 0)
end
end
"""
(signal, timeSignal, timeSignalName, signalType, arrayName, arrayIndices, nScalarSignals) =
getSignalWithWarning(result, name)
Call getSignal(result,name) and print a warning message if `signal == nothing`
"""
function getSignalDetailsWithWarning(result,name::AbstractString)
(sig, timeSig, timeSigName, sigType, arrayName, arrayIndices, nScalarSignals) = getSignalDetails(result,name)
if isnothing(sig)
@warn "\"$name\" is not correct or is not defined or has no values."
end
return (sig, timeSig, timeSigName, sigType, arrayName, arrayIndices, nScalarSignals)
end
appendUnit2(name, unit) = unit == "" ? name : string(name, " [", unit, "]")
function appendUnit(name, value)
if typeof(value) <: MonteCarloMeasurements.StaticParticles ||
typeof(value) <: MonteCarloMeasurements.Particles
appendUnit2(name, string(unit(value.particles[1])))
else
appendUnit2(name, string(unit(value)))
end
end
"""
(xsig, xsigLegend, ysig, ysigLegend, ysigType) = getPlotSignal(result, ysigName; xsigName=nothing)
Given the result data structure `result` and a variable `ysigName::AbstractString` with
or without array range indices (for example `ysigName = "a.b.c[2,3:5]"`) and an optional
variable name `xsigName::AbstractString` for the x-axis, return
- `xsig::Vector{T1<:Real}`: The vector of the x-axis signal without a unit. Segments are concatenated
and separated by NaN.
- `xsigLegend::AbstractString`: The legend of the x-axis consisting of the x-axis name
and its unit (if available).
- `ysig::Vector{T2}` or `::Matrix{T2}`: the y-axis signal, either as a vector or as a matrix
of values without units depending on the given name. For example, if `ysigName = "a.b.c[2,3:5]"`, then
`ysig` consists of a matrix with three columns corresponding to the variable values of
`"a.b.c[2,3]", "a.b.c[2,4]", "a.b.c[2,5]"` with the (potential) units are stripped off.
Segments are concatenated and separated by NaN.
- `ysigLegend::Vector{AbstractString}`: The legend of the y-axis as a vector
of strings, where `ysigLegend[1]` is the legend for `ysig`, if `ysig` is a vector,
and `ysigLegend[i]` is the legend for the i-th column of `ysig`, if `ysig` is a matrix.
For example, if variable `"a.b.c"` has unit `m/s`, then `ysigName = "a.b.c[2,3:5]"` results in
`ysigLegend = ["a.b.c[2,3] [m/s]", "a.b.c[2,3] [m/s]", "a.b.c[2,5] [m/s]"]`.
- `ysigType::`[`SignalType`](@ref): The signal type of `ysig` (either `ModiaResult.Continuous`
or `ModiaResult.Clocked`).
If `ysigName` is not valid, or no signal values are available, the function returns
`(nothing, nothing, nothing, nothing, nothing)`, and prints a warning message.
"""
function getPlotSignal(result, ysigName::AbstractString; xsigName=nothing)
(ysig, xsig, timeSigName, ysigType, ysigArrayName, ysigArrayIndices, nysigScalarSignals) = getSignalDetailsWithWarning(result, ysigName)
# Check y-axis signal and time signal
if isnothing(ysig) || isnothing(xsig) || isnothing(timeSigName) || signalLength(ysig) == 0
@goto ERROR
end
# Get xSigName or check xSigName
if isnothing(xsigName)
xsigName = timeSigName
elseif xsigName != timeSigName
(xsig, xsigTime, xsigTimeName, xsigType, xsigArrayName, xsigArrayIndices, nxsigScalarSignals) = getSignalDetailsWithWarning(result, xsigName)
if isnothing(xsig) || isnothing(xsigTime) || isnothing(xsigTimeName) || signalLength(xsig) == 0
@goto ERROR
elseif !hasSameSegments(ysig, xsig)
@warn "\"$xsigName\" (= x-axis) and \"$ysigName\" (= y-axis) have not the same time signal vector."
@goto ERROR
end
end
# Check x-axis signal
xsigValue = first(first(xsig))
if length(xsigValue) != 1
@warn "\"$xsigName\" does not characterize a scalar variable as needed for the x-axis."
@goto ERROR
elseif !( typeof(xsigValue) <: Number )
@warn "\"$xsigName\" has no Number type values, but values of type " * string(typeof(xsigValue)) * "."
@goto ERROR
elseif typeof(xsigValue) <: Measurements.Measurement
@warn "\"$xsigName\" is a Measurements.Measurement type and this is not (yet) supported for the x-axis."
@goto ERROR
elseif typeof(xsigValue) <: MonteCarloMeasurements.StaticParticles
@warn "\"$xsigName\" is a MonteCarloMeasurements.StaticParticles type and this is not supported for the x-axis."
@goto ERROR
elseif typeof(xsigValue) <: MonteCarloMeasurements.Particles
@warn "\"$xsigName\" is a MonteCarloMeasurements.Particles type and this is not supported for the x-axis."
@goto ERROR
end
# Build xsigLegend
xsigLegend = appendUnit(xsigName, xsigValue)
# Get one segment of the y-axis and check it
ysegment1 = first(ysig)
if !( typeof(ysegment1) <: AbstractVector || typeof(ysegment1) <: AbstractMatrix )
@error "Bug in function: typeof of an y-axis segment is neither a vector nor a Matrix, but " * string(typeof(ysegment1))
elseif !(eltype(ysegment1) <: Number)
@warn "\"$ysigName\" has no Number values but values of type " * string(eltype(ysegment1))
@goto ERROR
end
# Build ysigLegend
value = ysegment1[1]
if ysigArrayIndices == ()
# ysigName is a scalar variable
ysigLegend = [appendUnit(ysigName, value)]
else
# ysigName is an array variable
ysigLegend = [ysigArrayName * "[" for i = 1:nysigScalarSignals]
i = 1
ySizeLength = Int[]
for j1 in eachindex(ysigArrayIndices)
push!(ySizeLength, length(ysigArrayIndices[j1]))
i = 1
if j1 == 1
for j2 in 1:div(nysigScalarSignals, ySizeLength[1])
for j3 in ysigArrayIndices[1]
ysigLegend[i] *= string(j3)
i += 1
end
end
else
ncum = prod( ySizeLength[1:j1-1] )
for j2 in ysigArrayIndices[j1]
for j3 = 1:ncum
ysigLegend[i] *= "," * string(j2)
i += 1
end
end
end
end
for i = 1:nysigScalarSignals
ysigLegend[i] *= appendUnit("]", ysegment1[1,i])
end
end
#xsig2 = Vector{Any}(undef, length(xsig))
#ysig2 = Vector{Any}(undef, length(ysig))
#for i = 1:length(xsig)
# xsig2[i] = collect(ustrip.(xsig[i]))
# ysig2[i] = collect(ustrip.(ysig[i]))
#end
#xsig2 = collect(ustrip.(first(xsig)))
xsig2 = ustrip.(collect(first(xsig)))
ysig2 = collect(ustrip.(first(ysig)))
if length(xsig) > 1
xNaN = convert(eltype(xsig2), NaN)
if ndims(ysig2) == 1
yNaN = convert(eltype(ysig2), NaN)
else
yNaN = fill(convert(eltype(ysig2), NaN), 1, size(ysig2,2))
end
for i = 2:length(xsig)
xsig2 = vcat(xsig2, xNaN, collect((xsig[i])))
ysig2 = vcat(ysig2, yNaN, collect(ustrip.(ysig[i])))
end
end
return (xsig2, xsigLegend, ysig2, ysigLegend, ysigType)
@label ERROR
return (nothing, nothing, nothing, nothing, nothing)
end
"""
getHeading(result, heading)
Return `heading` if no empty string. Otherwise, return `defaultHeading(result)`.
"""
getHeading(result, heading::AbstractString) = heading != "" ? heading : defaultHeading(result)
"""
prepend!(prefix, signalLegend)
Add `prefix` string in front of every element of the `signalLegend` string-Vector.
"""
function prepend!(prefix::AbstractString, signalLegend::Vector{AbstractString})
for i in eachindex(signalLegend)
signalLegend[i] = prefix*signalLegend[i]
end
return signalLegend
end
| ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | code | 11884 | # License for this file: MIT (expat)
# Copyright 2020-2021, DLR Institute of System Dynamics and Control
#
# This file is part of module ModiaResult (is included by the ModiaPlot_XXMakie packages).
export plot, showFigure, saveFigure, closeFigure, closeAllFigures
#--------------------------- Utility definitions
# color definitions
const colors = ["blue1",
"green4",
"red1",
"cyan1",
"purple1",
"orange1",
"black",
"blue2",
"green3",
"red2",
"cyan2",
"purple2",
"orange2",
"grey20",
"blue3",
"green2",
"red3",
"cyan3",
"purple3",
"orange3",
"grey30",
"blue4",
"green1",
"red4",
"cyan4",
"purple4",
"orange4",
"grey40"]
mutable struct Diagram
fig
axis
row::Int
col::Int
curves::Union{AbstractVector, Nothing}
yLegend::Union{AbstractVector, Nothing}
function Diagram(fig,row,col,title)
axis = fig[row,col] = Axis(fig, title=title)
new(fig, axis, row, col, nothing, nothing)
end
end
# figures[i] is Figure instance of figureNumber = i
const figures = Dict{Int,Any}() # Dictionary of MatrixFigures
mutable struct MatrixFigure
fig
resolution
diagrams::Union{Matrix{Diagram},Nothing}
function MatrixFigure(figureNumber::Int, nrow::Int, ncol::Int, reuse::Bool, resolution)
if haskey(figures, figureNumber) && reuse
# Reuse existing figure
matrixFigure = figures[figureNumber]
if isnothing(matrixFigure.diagrams) || size(matrixFigure.diagrams) != (nrow,ncol)
error("From ModiaPlot.plot: reuse=true, but figure=$figureNumber has not $nrow rows and $ncol columns.")
end
else
# Create a new figure
fig = Figure(resolution=resolution)
diagrams = Matrix{Diagram}(undef,nrow,ncol)
matrixFigure = new(fig, resolution, diagrams)
figures[figureNumber] = matrixFigure
end
return matrixFigure
end
end
getMatrixFigure(figureNumber::Int) = figures[figureNumber]
setTheme() = set_theme!(fontsize = 12)
"""
getColor(i::Int)
Return color, given an integer (from colors)
"""
function getColor(i::Int)
j = mod(i, length(colors))
if j == 0
j = length(colors)
end
return colors[j]
end
"""
createLegend(diagram::Diagram, maxLegend)
Create a new legend in diagram
"""
function createLegend(diagram::Diagram, maxLegend::Int)::Nothing
curves = diagram.curves
yLegend = diagram.yLegend
if length(curves) > 1
nc = min(length(curves), maxLegend)
curves = curves[1:nc]
yLegend = yLegend[1:nc]
end
fig = diagram.fig
i = diagram.row
j = diagram.col
fig[i,j] = Legend(fig, curves, yLegend,
margin=[0,0,0,0], padding=[5,5,0,0], rowgap=0, halign=:right, valign=:top,
linewidth=1, labelsize=10, tellheight=false, tellwidth=false)
return nothing
end
const reltol = 0.001
function sig_max(xsig, y_min, y_max)
dy = y_max - y_min
abstol = typemax(eltype(y_min))
for (i,v) in enumerate(dy)
if v > 0.0 && v < abstol
abstol = v
end
end
@assert(abstol > 0.0)
y_max2 = similar(y_max)
for (i,value) = enumerate(y_max)
y_max2[i] = max(y_max[i], y_min[i] + max(abstol, abs(y_min[i])*reltol))
end
return y_max2
end
# Something of the following is required in the file where makie.jl is included:
# const Makie_Point2f = isdefined(GLMakie, :Point2f) ? Point2f : Point2f0
function fill_between(axis, xsig, ysig_min, ysig_max, color)
ysig_max2 = sig_max(xsig, ysig_min, ysig_max)
sig = Makie_Point2f.(xsig,ysig_min)
append!(sig, reverse(Makie_Point2f.(xsig,ysig_max2)))
push!(sig, sig[1])
return poly!(axis, sig, color = color)
end
function plotOneSignal(axis, xsig, ysig, color, ysigType, MonteCarloAsArea)
if typeof(ysig[1]) <: Measurements.Measurement
# Plot mean value signal
xsig_mean = Measurements.value.(xsig)
ysig_mean = Measurements.value.(ysig)
curve = lines!(axis, xsig_mean, ysig_mean, color=color)
# Plot area of uncertainty around mean value signal (use the same color, but transparent)
ysig_u = Measurements.uncertainty.(ysig)
ysig_max = ysig_mean + ysig_u
ysig_min = ysig_mean - ysig_u
fill_between(axis, xsig_mean, ysig_min, ysig_max, (color,0.2))
elseif typeof(ysig[1]) <: MonteCarloMeasurements.StaticParticles ||
typeof(ysig[1]) <: MonteCarloMeasurements.Particles
# Plot mean value signal
pfunctionsDefined = isdefined(MonteCarloMeasurements, :pmean)
if pfunctionsDefined
# MonteCarlMeasurements, version >= 1.0
xsig_mean = MonteCarloMeasurements.pmean.(xsig)
ysig_mean = MonteCarloMeasurements.pmean.(ysig)
else
# MonteCarloMeasurements, version < 1.0
xsig_mean = MonteCarloMeasurements.mean.(xsig)
ysig_mean = MonteCarloMeasurements.mean.(ysig)
end
xsig_mean = ustrip.(xsig_mean)
ysig_mean = ustrip.(ysig_mean)
curve = lines!(axis, xsig_mean, ysig_mean, color=color)
if MonteCarloAsArea
# Plot area of uncertainty around mean value signal (use the same color, but transparent)
if pfunctionsDefined
# MonteCarlMeasurements, version >= 1.0
ysig_max = MonteCarloMeasurements.pmaximum.(ysig)
ysig_min = MonteCarloMeasurements.pminimum.(ysig)
else
# MonteCarloMeasurements, version < 1.0
ysig_max = MonteCarloMeasurements.maximum.(ysig)
ysig_min = MonteCarloMeasurements.minimum.(ysig)
end
ysig_max = ustrip.(ysig_max)
ysig_min = ustrip.(ysig_min)
fill_between(axis, xsig_mean, ysig_min, ysig_max, (color,0.2))
else
# Plot all particle signals
value = ysig[1].particles
ysig3 = zeros(eltype(value), length(xsig))
for j in 1:length(value)
for i in eachindex(ysig)
ysig3[i] = ysig[i].particles[j]
end
ysig3 = ustrip.(ysig3)
lines!(axis, xsig, ysig3, color=(color,0.1))
end
end
else
if typeof(xsig[1]) <: Measurements.Measurement
xsig = Measurements.value.(xsig)
elseif typeof(xsig[1]) <: MonteCarloMeasurements.StaticParticles ||
typeof(xsig[1]) <: MonteCarloMeasurements.Particles
if isdefined(MonteCarloMeasurements, :pmean)
# MonteCarlMeasurements, version >= 1.0
xsig = MonteCarloMeasurements.pmean.(xsig)
else
# MonteCarlMeasurements, version < 1.0
xsig = MonteCarloMeasurements.mean.(xsig)
end
xsig = ustrip.(xsig)
end
if ysigType == ModiaResult.Clocked
curve = scatter!(axis, xsig, ysig, color=color, markersize = 2.0)
else
curve = lines!(axis, xsig, ysig, color=color)
end
end
return curve
end
function addPlot(names::Tuple, diagram::Diagram, result, grid::Bool, xLabel::Bool, xAxis,
prefix::AbstractString, reuse::Bool, maxLegend::Integer, MonteCarloAsArea::Bool)
xsigLegend = ""
yLegend = String[]
curves = Any[]
i0 = isnothing(diagram.curves) ? 0 : length(diagram.curves)
for name in names
name2 = string(name)
(xsig, xsigLegend, ysig, ysigLegend, ysigType) = ModiaResult.getPlotSignal(result, name2; xsigName = xAxis)
if !isnothing(xsig)
if ndims(ysig) == 1
push!(yLegend, prefix*ysigLegend[1])
push!(curves, plotOneSignal(diagram.axis, xsig, ysig, getColor(i0+1), ysigType, MonteCarloAsArea))
i0 = i0 + 1
else
for i = 1:size(ysig,2)
curve = plotOneSignal(diagram.axis, xsig, ysig[:,i], getColor(i0+i), ysigType, MonteCarloAsArea)
push!(yLegend, prefix*ysigLegend[i])
push!(curves, curve)
end
i0 = i0 + size(ysig,2)
end
end
end
#PyPlot.grid(grid)
if reuse
diagram.curves = append!(diagram.curves, curves)
diagram.yLegend = append!(diagram.yLegend, yLegend)
else
diagram.curves = curves
diagram.yLegend = yLegend
end
createLegend(diagram, maxLegend)
if xLabel && !reuse && xsigLegend !== nothing
diagram.axis.xlabel = xsigLegend
end
end
addPlot(name::AbstractString, args...) = addPlot((name,) , args...)
addPlot(name::Symbol , args...) = addPlot((string(name),), args...)
#--------------------------- Plot function
function plot(result, names::AbstractMatrix; heading::AbstractString="", grid::Bool=true, xAxis=nothing,
figure::Int=1, prefix::AbstractString="", reuse::Bool=false, maxLegend::Integer=10,
minXaxisTickLabels::Bool=false, MonteCarloAsArea=false)
if isnothing(result)
@info "The call of ModiaPlot.plot(result, ...) is ignored, since the first argument is nothing."
return
end
if !reusePossible
reuse=false
end
# Plot a vector or matrix of diagrams
setTheme()
(nrow, ncol) = size(names)
matrixFigure = MatrixFigure(figure, nrow, ncol, reuse, (min(ncol*600,1500), min(nrow*350, 900)))
fig = matrixFigure.fig
xAxis2 = isnothing(xAxis) ? xAxis : string(xAxis)
heading2 = ModiaResult.getHeading(result, heading)
hasTopHeading = !reuse && ncol > 1 && heading2 != ""
# Add diagrams
lastRow = true
xLabel = true
for i = 1:nrow
lastRow = i == nrow
for j = 1:ncol
if reuse
diagram = matrixFigure.diagrams[i,j]
else
if ncol == 1 && i == 1 && !hasTopHeading
diagram = Diagram(fig, i, j, heading2)
else
diagram = Diagram(fig, i, j, "")
end
matrixFigure.diagrams[i,j] = diagram
end
xLabel = !( minXaxisTickLabels && !lastRow )
addPlot(names[i,j], diagram, result, grid, xLabel, xAxis2, prefix, reuse, maxLegend, MonteCarloAsArea)
end
end
# Add overall heading in case of a matrix of diagrams (ncol > 1) and add a figure label on the top level
if hasTopHeading
fig[0,:] = Label(fig, heading2, textsize = 14)
end
if showFigureStringInDiagram
figText = fig[1,1,TopLeft()] = Label(fig, "showFigure(" * string(figure) * ")", textsize=9, color=:blue, halign = :left)
if hasTopHeading
figText.padding = (0, 0, 5, 0)
else
figText.padding = (0, 0, 30, 0)
end
end
# Update and display fig
trim!(fig.layout)
#update!(fig.scene)
if callDisplayFunction
display(fig)
end
return matrixFigure
end
| ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | code | 7357 | # License for this file: MIT (expat)
# Copyright 2020-2021, DLR Institute of System Dynamics and Control
#
# This file is part of module ModiaResult (is included by the ModiaPlot_xxxMakie packages).
"""
plot(result, names;
heading = "", grid = true, xAxis = nothing,
figure = 1, prefix = "", reuse = false, maxLegend = 10,
minXaxisTickLabels = false,
MonteCarloAsArea = true)
Generate **line plots** of the signals of the `result` data structure that are
identified with the `names` keys using the plot package defined with
`ModiaResult.@usePlotPackage(xxx)`. Possible values for `xxx`:
`"GLMakie", "WGLMakie", "CairoMakie", "PyPlot", "NoPlot", "SilentNoPlot"`).
`result` is any data structures that supports the abstract interface of `ModiaResult`.
Currently these are:
- `result::ModiaResult.ResultDict`
- `result::AbstractDict{String,T}`
- `result::DataFrames.DataFrame`
- `result` supports the `Tables.jl` interface with `Tables.columnaccess(result) = true`.
Argument `names` defines the diagrams to be drawn and the result data to be included in the respective diagram:
- If `names` is a **String**, generate one diagram with one time series of the variable with key `names`.
- If `names` is a **Tuple** of Strings, generate one diagram with the time series of the variables
with the keys given in the tuple.
- If names is a **Vector** or a **Matrix** of **Strings** and/or **Tuples**,
generate a vector or matrix of diagrams.
Note, the names (and their units, if available in the result) are automatically used as legends in the
respective diagram.
A signal variable identified by a `String` key can be a scalar of type `<:Number`
or an array of element type `<:Number`. A signal is defined by a vector of time values,
a corresponding vector of signal values, and the signal type (continuous or clocked).
Note, before passing data to the plot package,
it is converted to Float64. This allows to, for example, also plot rational numbers,
even if not supported by the plot package. `Measurements.Measurement{xxx}`
and `MonteCarloMeasurements` is specially handled.
# Optional Arguments
- `heading::AbstractString`: Optional heading above the diagram.
- `grid::Bool`: = true, to display a grid.
- `xAxis::Union{AbstractString,Nothing}`: Name of x-axis. If `xAxis=nothing`, the independent variable
of the result (usually `"time"` is used as x-axis.
- `figure::Int`: Integer identifier of the window in which the diagrams shall be drawn.
- `prefix::AbstractString`: String that is appended in front of every legend label
(useful especially if `reuse=true`).
- `reuse::Bool`: If figure already exists and reuse=false, clear the figure before adding the plot.
Otherwise, include the plot in the existing figure without removing the curves present in the figure.
`reuse = true` is ignored for `"WGLMakie"` (because not supported).
- `maxLegend::Int`: If the number of legend entries in one plot command `> maxLegend`,
the legend is suppressed.
All curves have still their names as labels. In PyPlot, the curves can be inspected by
their names by clicking in the toolbar of the plot on button `Edit axis, curve ..`
and then on `Curves`.
- `minXaxisTickLabels::Bool`: = true, if xaxis tick labels shall be
removed in a vector or array of plots, if not the last row
(useful when including plots in a document).
= false, x axis tick labels are always shown (useful when interactively zooming into a plot).
- `MonteCarloAsArea::Bool`: = true, if MonteCarloMeasurements values are shown with the mean value
and the area between the minimum and the maximum value of all particles.
= false, if all particles of MonteCarloMeasurements values are shown (e.g. if a value has 2000 particles,
then 2000 curves are shown in the diagram).
# Examples
```julia
import ModiaResult
using Unitful
# Generate "using xxx" statement
# (where "xxx" is from a previous ModiaResult.usePlotPackage("xxx"))
ModiaResult.@usingModiaPlot
# Construct result data
t = range(0.0, stop=10.0, length=100);
result = Dict{String,Any}();
result["time"] = t*u"s";
result["phi"] = sin.(t)*u"rad";
result["w"] = cos.(t)*u"rad/s";
result["a"] = 1.2*sin.(t)*u"rad/s^2";
result["r"] = hcat(0.4 * cos.(t), 0.5 * sin.(t), 0.3*cos.(t))*u"m";
# 1 signal in one diagram (legend = "phi [rad]")
plot(result, "phi")
# 3 signals in one diagram
plot(result, ("phi", "w", "a"), figure=2)
# 3 diagrams in form of a vector (every diagram has one signal)
plot(result, ["phi", "w", "r"], figure=3)
# 4 diagrams in form of a matrix (every diagram has one signal)
plot(result, ["phi" "w";
"a" "r[2]" ], figure=4)
# 2 diagrams in form of a vector
plot(result, [ ("phi", "w"), ("a") ], figure=5)
# 4 diagrams in form of a matrix
plot(result, [ ("phi",) ("phi", "w");
("phi", "w", "a") ("r[2:3]",) ],figure=6)
# Plot w=f(phi) in one diagram
plot(result, "w", xAxis="phi", figure=7)
# Append signal of the next simulation run to figure=1
# (legend = "Sim 2: phi [rad]")
result["phi"] = 0.5*result["phi"];
plot(result, "phi", prefix="Sim 2: ", reuse=true)
```
Example of a matrix of plots:

"""
plot(result, names::AbstractString; kwargs...) = plot(result, [names] ; kwargs...)
plot(result, names::Symbol ; kwargs...) = plot(result, [string(names)]; kwargs...)
plot(result, names::Tuple ; kwargs...) = plot(result, [names] ; kwargs...)
plot(result, names::AbstractVector; kwargs...) = plot(result, reshape(names, length(names), 1); kwargs...)
"""
showFigure(figure)
| Plot package | Effect |
|:-------------|:------------------------------------|
| GLMakie | Show `figure` in the single window. |
| WGLMakie | Show `figure` in the single window. |
| CairoMakie | Call is ignored |
| PyPlot | Call is ignored |
| NoPlot | Call is ignored |
# Example
```julia
import ModiaResult
ModiaResult.@usingModiaPlot
...
plot(..., figure=1)
plot(..., figure=2)
plot(..., figure=3)
showFigure(2)
showFigure(1)
```
"""
function showFigure end
"""
saveFigure(figure, file; kwargs...)
Save figure on file. The file extension defines the image format
(for example `*.png`).
| Plot package | Supported file extensions |
|:-------------|:------------------------------------|
| GLMakie | png, jpg, bmp |
| WGLMakie | png |
| CairoMakie | png, pdf, svg, eps |
| PyPlot | depends on [backend](https://matplotlib.org/stable/tutorials/introductory/usage.html) (png, pdf, jpg, tiff, svg, ps, eps) |
| NoPlot | Call is ignored |
# Keyword arguments
- resolution: (width::Int, height::Int) of the scene in dimensionless
units (equivalent to px for GLMakie and WGLMakie).
# Example
```julia
import ModiaResult
ModiaResult.@usingModiaPlot
...
plot(..., figure=1)
plot(..., figure=2)
saveFigure(1, "plot.png") # save in png-format
saveFigure(2, "plot.svg") # save in svg-format
```
"""
function saveFigure end
"""
closeFigure(figure)
Close `figure`.
"""
function closeFigure end
| ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | code | 1122 | include("test_01_OneScalarSignal.jl")
include("test_02_OneScalarSignalWithUnit.jl")
include("test_03_OneVectorSignalWithUnit.jl")
include("test_04_ConstantSignalsWithUnit.jl")
include("test_05_ArraySignalsWithUnit.jl")
include("test_06_OneScalarMeasurementSignal.jl")
include("test_07_OneScalarMeasurementSignalWithUnit.jl")
include("test_20_SeveralSignalsInOneDiagram.jl")
include("test_21_VectorOfPlots.jl")
include("test_22_MatrixOfPlots.jl")
include("test_23_MatrixOfPlotsWithTimeLabelsInLastRow.jl")
include("test_24_Reuse.jl")
include("test_25_SeveralFigures.jl")
include("test_26_TooManyLegends.jl")
include("test_51_OneScalarMonteCarloMeasurementsSignal.jl")
include("test_52_MonteCarloMeasurementsWithDistributions.jl")
include("test_70_ResultDict.jl")
# include("test_71_Tables_Rotational_First.jl") # deactivated, because "using CSV"
include("test_72_ResultDictWithMatrixOfPlots.jl")
include("test_80_Warnings.jl")
include("test_81_SaveFigure.jl")
include("test_82_AllExportedFunctions.jl")
# include("test_90_CompareOneScalarSignal.jl")
# include("test_91_CompareOneScalarSignalWithUnit.jl") | ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | code | 263 | module Runtests
# Run all tests with SilentNoPlot (so not plots)
import ModiaResult
using Test
@testset "Test ModiaResult/test" begin
ModiaResult.usePlotPackage("SilentNoPlot")
include("include_all.jl")
ModiaResult.usePreviousPlotPackage()
end
end | ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | code | 256 | module Runtests_withPlot
# Run all tests with the activated plot package
import ModiaResult
using Test
const test_title = "Tests with plot package " * ModiaResult.currentPlotPackage()
@testset "$test_title" begin
include("include_all.jl")
end
end | ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | code | 366 | module test_01_OneScalarSignal
using ModiaResult
using ModiaResult.OrderedCollections
ModiaResult.@usingModiaPlot
t = range(0.0, stop=10.0, length=100)
result = OrderedDict{String,Any}()
result["time"] = t
result["phi"] = sin.(t)
println("\n... test_01_OneScalarSignal.jl:\n")
ModiaResult.printResultInfo(result)
plot(result, "phi", heading="sine(time)")
end | ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | code | 420 | module test_02_OneScalarSignalWithUnit
using ModiaResult
using ModiaResult.Unitful
using ModiaResult.OrderedCollections
ModiaResult.@usingModiaPlot
t = range(0.0, stop=10.0, length=100)
result = OrderedDict{String,Any}()
result["time"] = t*u"s"
result["phi"] = sin.(t)*u"rad"
println("\n... test_02_OneScalarSignalWithUnit.jl:\n")
ModiaResult.printResultInfo(result)
plot(result, "phi", heading="Sine(time)")
end | ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | code | 551 | module test_03_OneVectorSignalWithUnit
using ModiaResult
using ModiaResult.Unitful
using ModiaResult.OrderedCollections
ModiaResult.@usingModiaPlot
t = range(0.0, stop=10.0, length=100)
result = OrderedDict{String,Any}()
result["time"] = t*u"s"
result["r"] = [[0.4 * cos(t[i]),
0.5 * sin(t[i]),
0.3 * cos(t[i])] for i in eachindex(t)]*u"m"
println("\n... test_03_OneVectorSignalWithUnit.jl:")
ModiaResult.printResultInfo(result)
plot(result, ["r", "r[2]", "r[2:3]"], heading="Plot vector signals")
end | ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | code | 691 | module test_04_ConstantSignalsWithUnit
using ModiaResult
using ModiaResult.Unitful
using ModiaResult.OrderedCollections
ModiaResult.@usingModiaPlot
inertia = [1.1 1.2 1.3;
2.1 2.2 2.3;
3.1 3.2 3.3]u"kg*m^2"
result = OrderedDict{String,Any}()
result["time"] = [0.0, 1.0]*u"s"
result["phi_max"] = [1.1f0, 1.1f0]*u"rad"
result["i_max"] = [2, 2]
result["open"] = [true , true]
result["Inertia"] = [inertia, inertia]
println("\n... test_04_ConstantSignalsWithUnit.jl:")
ModiaResult.printResultInfo(result)
plot(result, ["phi_max", "i_max", "open", "Inertia[2,2]", "Inertia[1,2:3]", "Inertia"], heading="Constants")
end | ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | code | 554 | module test_05_ArraySignalsWithUnit
using ModiaResult
using ModiaResult.Unitful
using ModiaResult.OrderedCollections
ModiaResult.@usingModiaPlot
t = range(0.0, stop=1.0, length=100)
result = OrderedDict{String,Any}()
Ibase = [1.1 1.2 1.3;
2.1 2.2 2.3;
3.1 3.2 3.3]u"kg*m^2"
result["time"] = t*u"s"
result["Inertia"] = [Ibase*t[i] for i in eachindex(t)]
println("\n... test_05_ArraySignalsWithUnit:")
ModiaResult.printResultInfo(result)
plot(result, ["Inertia[2,2]", "Inertia[2:3,3]"], heading="Array signals")
end
| ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | code | 518 | module test_06_OneScalarMeasurementSignal
using ModiaResult
using ModiaResult.OrderedCollections
using ModiaResult.Unitful
using ModiaResult.Measurements
ModiaResult.@usingModiaPlot
t = range(0.0, stop=10.0, length=100)
c = ones(size(t,1))
result = OrderedDict{String,Any}()
result["time"] = t
result["phi"] = [sin(t[i]) ± 0.1*c[i] for i in eachindex(t)]
println("\n... test_06_OneScalarMeasurementSignal.jl:")
ModiaResult.printResultInfo(result)
plot(result, "phi", heading="Sine(time) with Measurement")
end | ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | code | 544 | module test_07_OneScalarMeasurementSignalWithUnit
using ModiaResult
using ModiaResult.OrderedCollections
using ModiaResult.Unitful
using ModiaResult.Measurements
ModiaResult.@usingModiaPlot
t = range(0.0, stop=10.0, length=100)
c = ones(size(t,1))
result = OrderedDict{String,Any}()
result["time"] = t*u"s"
result["phi"] = [sin(t[i]) ± 0.1*c[i] for i in eachindex(t)]*u"rad"
println("\n... test_07_OneScalarMeasurementSignalWithUnit:")
ModiaResult.printResultInfo(result)
plot(result, "phi", heading="Sine(time) with Measurement")
end
| ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | code | 636 | module test_20_SeveralSignalsInOneDiagram
using ModiaResult
using ModiaResult.Unitful
using ModiaResult.OrderedCollections
ModiaResult.@usingModiaPlot
t = range(0.0, stop=10.0, length=100)
result = OrderedDict{String,Any}()
result["time"] = t*u"s"
result["phi"] = sin.(t)u"rad"
result["phi2"] = 0.5 * sin.(t)u"rad"
result["w"] = cos.(t)u"rad/s"
result["w2"] = 0.6 * cos.(t)u"rad/s"
result["A"] = ModiaResult.OneValueVector(0.6, length(t))
println("\n... test_20_SeveralSignalsInOneDiagram:")
ModiaResult.printResultInfo(result)
plot(result, ("phi", "phi2", "w", "w2", "A"), heading="Several signals in one diagram")
end
| ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | code | 547 | module test_21_VectorOfPlots
using ModiaResult
using ModiaResult.Unitful
using ModiaResult.OrderedCollections
ModiaResult.@usingModiaPlot
t = range(0.0, stop=10.0, length=100)
result = OrderedDict{String,Any}()
result["time"] = t*u"s"
result["phi"] = sin.(t)u"rad"
result["phi2"] = 0.5 * sin.(t)u"rad"
result["w"] = cos.(t)u"rad/s"
result["w2"] = 0.6 * cos.(t)u"rad/s"
println("\n... test_21_VectorOfPlots:")
ModiaResult.printResultInfo(result)
plot(result, ["phi2", ("w",), ("phi", "phi2", "w", "w2")], heading="Vector of plots")
end | ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | code | 741 | module test_22_MatrixOfPlots
using ModiaResult
using ModiaResult.OrderedCollections
using ModiaResult.Unitful
ModiaResult.@usingModiaPlot
t = range(0.0, stop=10.0, length=100)
result = OrderedDict{String,Any}()
result["time"] = t*u"s"
result["phi"] = sin.(t)u"rad"
result["phi2"] = 0.5 * sin.(t)u"rad"
result["w"] = cos.(t)u"rad/s"
result["w2"] = 0.6 * cos.(t)u"rad/s"
result["r"] = [[0.4 * cos(t[i]),
0.5 * sin(t[i]),
0.3 * cos(t[i])] for i in eachindex(t)]*u"m"
println("\n... test_22_MatrixOfPlots:")
ModiaResult.printResultInfo(result)
plot(result, [ ("phi", "r") ("phi", "phi2", "w");
("w", "w2", "phi2") "w" ], heading="Matrix of plots")
end | ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | code | 874 | module test_23_MatrixOfPlotsWithTimeLabelsInLastRow
using ModiaResult
using ModiaResult.OrderedCollections
using ModiaResult.Unitful
ModiaResult.@usingModiaPlot
t = range(0.0, stop=10.0, length=100)
result = OrderedDict{String,Any}()
result["time"] = t*u"s"
result["phi"] = sin.(t)u"rad"
result["phi2"] = 0.5 * sin.(t)u"rad"
result["w"] = cos.(t)u"rad/s"
result["w2"] = 0.6 * cos.(t)u"rad/s"
result["r"] = [[0.4 * cos(t[i]),
0.5 * sin(t[i]),
0.3 * cos(t[i])] for i in eachindex(t)]*u"m"
println("\n... test_23_MatrixOfPlotsWithTimeLabelsInLastRow:")
ModiaResult.printResultInfo(result)
plot(result, [ ("phi", "r") ("phi", "phi2", "w");
("w", "w2", "phi2") ("phi", "w") ],
minXaxisTickLabels = true,
heading="Matrix of plots with time labels in last row")
end | ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | code | 671 | module test_24_Reuse
using ModiaResult
using ModiaResult.Unitful
using ModiaResult.OrderedCollections
ModiaResult.@usingModiaPlot
t = range(0.0, stop=10.0, length=100)
result1 = OrderedDict{String,Any}()
result1["time"] = t*u"s"
result1["phi"] = sin.(t)u"rad"
result1["w"] = cos.(t)u"rad/s"
result2 = OrderedDict{String,Any}()
result2["time"] = t*u"s"
result2["phi"] = 1.2*sin.(t)u"rad"
result2["w"] = 0.8*cos.(t)u"rad/s"
println("\n... test_24_Reuse:")
ModiaResult.printResultInfo(result1)
ModiaResult.printResultInfo(result2)
plot(result1, ("phi", "w"), prefix="Sim 1:", heading="Test reuse")
plot(result2, ("phi", "w"), prefix="Sim 2:", reuse=true)
end | ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | code | 809 | module test_25_SeveralFigures
using ModiaResult
using ModiaResult.OrderedCollections
using ModiaResult.Unitful
ModiaResult.@usingModiaPlot
t = range(0.0, stop=10.0, length=100)
result = OrderedDict{String,Any}()
result["time"] = t*u"s"
result["phi"] = sin.(t)u"rad"
result["phi2"] = 0.5 * sin.(t)u"rad"
result["w"] = cos.(t)u"rad/s"
result["w2"] = 0.6 * cos.(t)u"rad/s"
result["r"] = [[0.4 * cos(t[i]),
0.5 * sin(t[i]),
0.3 * cos(t[i])] for i in eachindex(t)]*u"m"
println("\n... test_25_SeveralFigures:")
ModiaResult.printResultInfo(result)
plot(result, ("phi", "r") , heading="First figure" , figure=1)
plot(result, ["w", "w2", "r[2]"], heading="Second figure", figure=2)
plot(result, "r" , heading="Third figure" , figure=3)
end
| ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | code | 698 | module test_26_TooManyLegends
using ModiaResult
using ModiaResult.OrderedCollections
using ModiaResult.Unitful
ModiaResult.@usingModiaPlot
t = range(0.0, stop=10.0, length=100)
result = OrderedDict{String,Any}()
result["time"] = t*u"s"
result["phi"] = sin.(t)u"rad"
result["phi2"] = 0.5 * sin.(t)u"rad"
result["w"] = cos.(t)u"rad/s"
result["w2"] = 0.6 * cos.(t)u"rad/s"
result["r"] = [[0.4 * cos(t[i]),
0.5 * sin(t[i]),
0.3 * cos(t[i])] for i in eachindex(t)]*u"m"
println("\n... test_26_TooManyLegends:")
ModiaResult.printResultInfo(result)
plot(result, ("phi", "r", "w", "w2"),
maxLegend = 5,
heading = "Too many legends")
end | ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | code | 593 | module test_51_OneScalarMonteCarloMeasurementsSignal
using ModiaResult
using ModiaResult.OrderedCollections
using ModiaResult.Unitful
using ModiaResult.MonteCarloMeasurements
ModiaResult.@usingModiaPlot
t = range(0.0, stop=10.0, length=100)
c = ones(size(t,1))
result = OrderedDict{String,Any}()
result["time"] = t*u"s"
result["phi"] = [sin(t[i]) ± 0.1*c[i] for i in eachindex(t)]*u"rad"
println("\n... test_51_OneScalarMonteCarloMeasurementsSignal:")
ModiaResult.printResultInfo(result)
plot(result, "phi", MonteCarloAsArea=true, heading="Sine(time) with MonteCarloMeasurements")
end | ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | code | 1295 | module test_52_MonteCarloMeasurementsWithDistributions
using ModiaResult
using ModiaResult.OrderedCollections
using ModiaResult.Unitful
using ModiaResult.MonteCarloMeasurements
using ModiaResult.MonteCarloMeasurements.Distributions
ModiaResult.@usingModiaPlot
t = range(0.0, stop=10.0, length=100)
uniform1(xmin,xmax) = MonteCarloMeasurements.Particles( 100,Distributions.Uniform(xmin,xmax))
uniform2(xmin,xmax) = MonteCarloMeasurements.StaticParticles(100,Distributions.Uniform(xmin,xmax))
particles1 = uniform1(-0.4, 0.4)
particles2 = uniform2(-0.4, 0.4)
result = OrderedDict{String,Any}()
# ∓ are 100 StaticParticles uniform distribution
result["time"] = t*u"s"
result["phi1"] = [sin(t[i]) + particles1*t[i]/10.0 for i in eachindex(t)]*u"rad"
result["phi2"] = [sin(t[i]) + particles2*t[i]/10.0 for i in eachindex(t)]*u"rad"
result["phi3"] = [sin(t[i]) ∓ 0.4*t[i]/10.0 for i in eachindex(t)]*u"rad"
println("\n... test_52_MonteCarloMeasurementsWithDistributions:")
ModiaResult.printResultInfo(result)
plot(result, ["phi1", "phi2", "phi3"], figure=1,
heading="Sine(time) with MonteCarloParticles/StaticParticles (plot area)")
plot(result, ["phi1", "phi2", "phi3"], figure=2,
heading="Sine(time) with MonteCarloParticles/StaticParticles (plot all runs)")
end
| ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | code | 996 | module test_0_ResultDict
using ModiaResult
using ModiaResult.Unitful
ModiaResult.@usingModiaPlot
time0 = [0.0, 15.0]
t = ([time0], [time0], ModiaResult.Independent)
time1 = 0.0 : 0.1 : 3.0
time2 = 5.0 : 0.1 : 9.5
time3 = 11.0 : 0.1 : 15.0
time4 = 0.0 : 0.1 : 15.0
sigA1 = 0.9*sin.(time1)u"m"
sigA2 = cos.(time2)u"m"
sigA3 = 1.1*sin.(time3)u"m"
sigA = ([time1, time2, time3],
[sigA1, sigA2, sigA3 ],
ModiaResult.Continuous)
sigB = ([time4], [0.7*sin.(time4)u"m/s"], ModiaResult.Continuous)
sigC = ([time2], [sin.(time2)u"N*m"] , ModiaResult.Clocked)
result = ModiaResult.ResultDict("time" => t,
"sigA" => sigA,
"sigB" => sigB,
"sigC" => sigC,
defaultHeading = "Signals from test_70_ResultDict.jl")
println("\n... test_70_ResultDict.jl:\n")
ModiaResult.printResultInfo(result)
plot(result, ("sigA", "sigB", "sigC"))
end | ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | code | 647 | module test_71_Tables_Rotational_First
using ModiaResult
using ModiaResult.DataFrames
using CSV
ModiaResult.@usingModiaPlot
result1 = CSV.File("$(ModiaResult.path)/test/test_71_Tables_Rotational_First.csv")
result2 = DataFrames.DataFrame(result1)
println("\n... test_71_Tables_Rotational_First.jl:")
println("CSV-Table (result1 = CSV.File(fileName)):\n")
ModiaResult.printResultInfo(result1)
println("\nDataFrame-Table (result2 = DataFrame(result1)):\n")
ModiaResult.printResultInfo(result2)
plot(result1, ["damper.w_rel", "inertia3.w"], prefix="result1: ")
plot(result2, ["damper.w_rel", "inertia3.w"], prefix="result2: ", reuse=true)
end
| ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | code | 1308 | module test_72_ResultDictWithMatrixOfPlots
using ModiaResult
using ModiaResult.Unitful
ModiaResult.@usingModiaPlot
tr = [0.0, 15.0]
t0 = (tr, tr, ModiaResult.Independent)
t1 = (0.0 : 0.1 : 15.0)
t2 = (0.0 : 0.1 : 3.0)
t3 = (5.0 : 0.3 : 9.5)
t4 = (11.0 : 0.1 : 15.0)
sigA1 = 0.9*sin.(t2)u"m"
sigA2 = cos.(t3)u"m"
sigA3 = 1.1*sin.(t4)u"m"
R2 = [[0.4 * cos(t), 0.5 * sin(t), 0.3 * cos(t)] for t in t2]u"m"
R4 = [[0.2 * cos(t), 0.3 * sin(t), 0.2 * cos(t)] for t in t4]u"m"
sigA = ([t2,t3,t4], [sigA1,sigA2,sigA3 ], ModiaResult.Continuous)
sigB = ([t1] , [0.7*sin.(t1)u"m/s"], ModiaResult.Continuous)
sigC = ([t3] , [sin.(t3)u"N*m"] , ModiaResult.Clocked)
r = ([t2,t4] , [R2,R4] , ModiaResult.Continuous)
result = ModiaResult.ResultDict("time" => t0,
"sigA" => sigA,
"sigB" => sigB,
"sigC" => sigC,
"r" => r,
defaultHeading = "Signals from test_72_ResultDictWithMatrixOfPlots",
hasOneTimeSignal = false)
println("\n... test_72_ResultDictWithMatrixOfPlots.jl:\n")
ModiaResult.printResultInfo(result)
plot(result, [("sigA", "sigB", "sigC"), "r[2:3]"])
end
| ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | code | 1281 | module test_72_ResultDictWithMatrixOfPlotsb
using ModiaResult
using ModiaResult.Unitful
ModiaResult.@usingModiaPlot
tr = [0.0, 15.0]
t0 = (tr, tr, ModiaResult.Independent)
t1 = (0.0 : 0.1 : 15.0)
t2 = (0.0 : 0.1 : 3.0)
t3 = (5.0 : 0.3 : 9.5)
t4 = (11.0 : 0.1 : 15.0)
sigA1 = 0.9*sin.(t2)u"m"
sigA2 = cos.(t3)u"m"
sigA3 = 1.1*sin.(t4)u"m"
R2 = [[0.4 * cos(t), 0.5 * sin(t), 0.3 * cos(t)] for t in t2]u"m"
R4 = [[0.2 * cos(t), 0.3 * sin(t), 0.2 * cos(t)] for t in t4]u"m"
sigA = ([t2,t3,t4], [sigA1,sigA2,sigA3 ], ModiaResult.Continuous)
sigB = ([t1] , [0.7*sin.(t1)u"m/s"], ModiaResult.Continuous)
sigC = ([t3] , [sin.(t3)u"N*m"] , ModiaResult.Clocked)
r = ([t2,t4] , [R2,R4] , ModiaResult.Continuous)
result = ModiaResult.ResultDict("time" => t0,
"sigA" => sigA,
"sigB" => sigB,
"sigC" => sigC,
"r" => r,
defaultHeading = "Segmented time signals",
hasOneTimeSignal = false)
println("\n... test_72_ResultDictWithMatrixOfPlots.jl:\n")
ModiaResult.printResultInfo(result)
plot(result, [("sigA", "sigB", "sigC"), "r[2:3]"])
end
| ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | code | 1019 | module test_80_Warnings
using ModiaResult
using ModiaResult.OrderedCollections
using ModiaResult.Unitful
ModiaResult.@usingModiaPlot
t = range(0.0, stop=10.0, length=100)
t2 = range(0.0, stop=10.0, length=110)
result = OrderedDict{String,Any}()
result["time"] = t*u"s"
result["phi"] = sin.(t)u"rad"
result["phi2"] = 0.5 * sin.(t)u"rad"
result["w"] = cos.(t)u"rad/s"
result["w2"] = 0.6 * cos.(t)u"rad/s"
result["r"] = [[0.4 * cos(t[i]),
0.5 * sin(t[i]),
0.3 * cos(t[i])] for i in eachindex(t)]*u"m"
result["nothingSignal"] = nothing
result["emptySignal"] = Float64[]
result["wrongSizeSignal"] = sin.(t2)u"rad"
println("\n... test_40_Warnings")
ModiaResult.printResultInfo(result)
plot(result, ("phi", "r", "signalNotDefined"), heading="Plot with warning 1" , figure=1)
plot(result, ("signalNotDefined",
"nothingSignal",
"emptySignal",
"wrongSizeSignal"),
heading="Plot with warning 2" , figure=2)
end | ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | code | 368 | module test_81_SaveFigure
import ModiaResult
ModiaResult.@usingModiaPlot
println("\n... test test_81_SaveFigure.jl:\n")
t = range(0.0, stop=10.0, length=100)
result = Dict{String,Any}("time" => t, "phi" => sin.(t))
info = ModiaResult.resultInfo(result)
ModiaResult.printResultInfo(result)
plot(result, "phi", figure=2)
saveFigure(2, "test_saveFigure2.png")
end | ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | code | 463 | module test_82_AllExportedFunctions
import ModiaResult
ModiaResult.@usingModiaPlot
# Test the Figure operations
println("\n... test test_82_AllExportedFunctions.jl:\n")
t = range(0.0, stop=10.0, length=100)
result = Dict{String,Any}("time" => t, "phi" => sin.(t))
info = ModiaResult.resultInfo(result)
ModiaResult.printResultInfo(result)
plot(result, "phi", figure=2)
showFigure(2)
saveFigure(2, "test_saveFigure.png")
closeFigure(2)
closeAllFigures()
end | ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | code | 2352 | module test_90_CompareOneScalarSignal
using ModiaResult
using ModiaResult.OrderedCollections
using ModiaResult.DataFrames
ModiaResult.@usingModiaPlotPackage
t1 = range(0.0, stop=10.0, length=100)
t2 = deepcopy(t1)
t3 = range(0.0 , stop=10.0 , length=112)
t4 = range(-0.1, stop=10.1, length=111)
result1 = OrderedDict{String,Any}()
result2 = DataFrame()
result3 = DataFrame()
result4 = DataFrame()
result1["time"] = t1
result1["phi"] = sin.(t1)
result2."time" = t2
result2."phi" = sin.(t2)
result3[!,"time"] = t3
result3[!,"phi"] = sin.(t3)
result4."time" = t4
result4."phi" = sin.(t4.+0.01)
# Check makeSameTimeAxis
(result1b, result2b, sameTimeRange1) = ModiaResult.makeSameTimeAxis(result1, result2, select=["phi", "w"])
println("sameTimeRange1 = ", sameTimeRange1)
(result1c, result3b, sameTimeRange3) = ModiaResult.makeSameTimeAxis(result1, result3)
println("sameTimeRange3 = ", sameTimeRange3)
(result1d, result4b, sameTimeRange4) = ModiaResult.makeSameTimeAxis(result1, result4)
println("sameTimeRange4 = ", sameTimeRange4)
# check compareResults
(success2, diff2, diff_names2, max_error2, within_tolerance2) = ModiaResult.compareResults(result1, result2)
println("success2 = $success2, max_error2 = $max_error2, within_tolerance2 = $within_tolerance2")
(success3, diff3, diff_names3, max_error3, within_tolerance3) = ModiaResult.compareResults(result1, result3)
println("success3 = $success3, max_error3 = $max_error3, within_tolerance3 = $within_tolerance3")
(success4, diff4, diff_names4, max_error4, within_tolerance4) = ModiaResult.compareResults(result1, result4)
println("success4 = $success4, max_error4 = $max_error4, within_tolerance4 = $within_tolerance4")
plot(result1, "phi", prefix="r1.")
plot(result2, "phi", prefix="r2.", reuse=true)
plot(result3, "phi", prefix="r3.", reuse=true)
plot(result4, "phi", prefix="r4.", reuse=true)
plot(result1b, "phi", prefix="r1b.", reuse=true)
plot(result2b, "phi", prefix="r2b.", reuse=true)
plot(result1c, "phi", prefix="r1c.", reuse=true)
plot(result3b, "phi", prefix="r3b.", reuse=true)
plot(result1d, "phi", prefix="r1d.", reuse=true)
plot(result4b, "phi", prefix="r4b.", reuse=true)
plot(diff2, "phi", prefix="diff2_", figure=2)
plot(diff3, "phi", prefix="diff3_", figure=2, reuse=true)
plot(diff4, "phi", prefix="diff4_", figure=2, reuse=true)
end
| ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | code | 1097 | module test_91_CompareOneScalarSignalWithUnit
using ModiaResult
using ModiaResult.Unitful
using ModiaResult.DataFrames
ModiaResult.@usingModiaPlotPackage
t = range(0.0, stop=10.0, length=100)
result1 = DataFrame()
result2 = DataFrame()
result3 = DataFrame()
result1."time" = t*u"s"
result1."w" = sin.(t)*u"rad/s"
result2."time" = t*u"s"
result2."w" = 0.0005*u"rad/s" .+ sin.(t)*u"rad/s"
result3."time" = t
result3."w" = sin.(t.+0.001)
(success2, diff2, diff_names2, max_error2, within_tolerance2) = ModiaResult.compareResults(result1, result2)
println("success2 = $success2, max_error2 = $max_error2, within_tolerance2 = $within_tolerance2")
(success3, diff3, diff_names3, max_error3, within_tolerance3) = ModiaResult.compareResults(result1, result3)
println("success3 = $success3, max_error3 = $max_error3, within_tolerance3 = $within_tolerance3")
plot(result1, "w", prefix="r1.")
plot(result2, "w", prefix="r2.", reuse=true)
plot(result3, "w", prefix="r3.", reuse=true)
plot(diff2, "w", prefix="diff2_", figure=2)
plot(diff3, "w", prefix="diff3_", figure=2, reuse=true)
end
| ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | docs | 3916 | # ModiaResult
[](https://modiasim.github.io/ModiaResult.jl/stable/index.html)
[](https://github.com/ModiaSim/ModiaResult.jl/blob/master/LICENSE.md)
ModiaResult is part of [ModiaSim](https://modiasim.github.io/docs/). See also the ModiaResult [documentation](https://modiasim.github.io/ModiaResult.jl/stable/index.html).
ModiaResult defines an abstract interface for **simulation results** and provides overloaded methods for:
- Dictionaries,
- [DataFrame](https://github.com/JuliaData/DataFrames.jl) tables,
- [Tables](https://github.com/JuliaData/Tables.jl) (for example [CSV](https://github.com/JuliaData/CSV.jl)), and
- ModiaResult.ResultDict (special dictionary with all features of the interface).
Additionally, **operations** on simulation results are provided, especially to produce **line plots** in a **convenient way** based on
- [GLMakie](https://github.com/JuliaPlots/GLMakie.jl) (interactive plots in an OpenGL window),
- [WGLMakie](https://github.com/JuliaPlots/WGLMakie.jl) (interactive plots in a browser window),
- [CairoMakie](https://github.com/JuliaPlots/CairoMakie.jl) (static plots on file with publication quality),
- [PyPlot](https://github.com/JuliaPy/PyPlot.jl) (plots with Matplotlib from Python) and
- NoPlot (= all plot calls are ignored; NoPlot is a module in ModiaResult), or
- SilentNoPlot (= NoPlot without messages; SilentNoPlot is a module in ModiaResult).
More details:
- [Getting Started](https://modiasim.github.io/ModiaResult.jl/stable/GettingStarted.html)
- [Functions](https://modiasim.github.io/ModiaResult.jl/stable/Functions.html)
- [Abstract Interface](https://modiasim.github.io/ModiaResult.jl/stable/AbstractInterface.html)
## Installation
All packages are registered and are installed with:
```julia
julia> ]add ModiaResult
add ModiaPlot_GLMakie # if plotting with GLMakie desired
add ModiaPlot_WGLMakie # if plotting with WGLMakie desired
add ModiaPlot_CairoMakie # if plotting with CairoMakie desired
add ModiaPlot_PyPlot # if plotting with PyPlot desired
```
If you have trouble installing `ModiaPlot_PyPlot`, see
[Installation of PyPlot.jl](https://modiasim.github.io/ModiaResult.jl/stable/index.html#Installation-of-PyPlot.jl)
## Example
Assume that the result data structure is available, then the following commands
```julia
import ModiaResult
# Define plotting software globally
ModiaResult.activate("PyPlot") # or ENV["MODIA_PLOT"] = "PyPlot"
# Execute "using ModiaPlot_<globally defined plot package>"
ModiaResult.@usingModiaPlot # = "using ModiaPlot_PyPlot"
# Generate line plots
plot(result, [("sigA", "sigB", "sigC"), "r[2:3]"])
```
generate the following plot:

## Abstract Result Interface
For every result data structure a few access functions have to be defined
(for details see [Abstract Interface](https://modiasim.github.io/ModiaResult.jl/stable/AbstractInterface.html)).
Most importantly:
```
(timeSignal, signal, signalType) = ModiaResult.rawSignal(result, name)
```
Given the result data structure `result` and a variable `name::AbstractString`,
return the result values of the independent variable (= `timeSignal`), the
corresponding result values of the variable (= `signal`) and the type
of the signal. The following figure sketches the returned `timeSignal` and `signal` data structures:

Other signal types might be mapped to this basic signal type by introducing views.
## Main developer
[Martin Otter](https://rmc.dlr.de/sr/en/staff/martin.otter/),
[DLR - Institute of System Dynamics and Control](https://www.dlr.de/sr/en)
| ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | docs | 1558 | # Abstract Interface
```@meta
CurrentModule = ModiaResult
```
This chapter documents the abstract interface to access a result data structure.
| Functions | Description |
|:--------------------------------|:------------------------------------------------------------|
| [`SignalType`](@ref) | Predefined enumeration defining the supported signal types. |
| [`rawSignal`](@ref) | Return raw signal data given the signal name (required). |
| [`signalNames`](@ref) | Return all signal names (required). |
| [`timeSignalName`](@ref) | Return the name of the time signal (required). |
| [`hasOneTimeSignal`](@ref) | Return true if one time signal present (required). |
| [`getSignalDetails`](@ref) | Return details of signal data (optional). |
| [`hasSignal`](@ref) | Return true if signal name is known (optional). |
| [`defaultHeading`](@ref) | Return default heading as string (optional). |
## Predefined enumeration
```@docs
SignalType
```
## Required functions
The following functions must be defined for a new result data structure.
```@docs
rawSignal
signalNames
timeSignalName
hasOneTimeSignal
```
## Optional functions
The following functions can be defined for a new result data structure.
If they are not defined, a default implementation is used.
```@docs
getSignalDetails
hasSignal
defaultHeading
```
| ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | docs | 4107 | # Functions
## Overview
```@meta
CurrentModule = ModiaResult
```
This chapter documents the functions that a user of this package typically utilizes.
The following functions are available when prefixed with `ModiaResult`.
!!! note
`ModiaResult` does not `export` any symbols.\
(for example: `import ModiaResult; ModiaResult.usePlotPackage("PyPlot")`).
Some packages, such as [Modia](https://github.com/ModiaSim/Modia.jl), export all
the function names below and then the functions can be directly accessed.\
(for example: `using Modia; usePlotPackage("PyPlot")`).
| Functions | Description |
|:---------------------------------|:----------------------------------------------------------|
| [`@usingModiaPlot`](@ref) | Expands into `using ModiaPlot_<PlotPackageName>` |
| [`usePlotPackage`](@ref) | Define the plot package to be used. |
| [`usePreviousPlotPackage`](@ref) | Define the previously defined plot package to be used. |
| [`currentPlotPackage`](@ref) | Return name defined with [`usePlotPackage`](@ref) |
| [`resultInfo`](@ref) | Return info about the result as [DataFrame](https://github.com/JuliaData/DataFrames.jl) table |
| [`printResultInfo`](@ref) | Print info of the result on stdout. |
| [`rawSignal`](@ref) | Return raw signal data given the signal name. |
| [`getPlotSignal`](@ref) | Return signal data prepared for a plot package. |
| [`defaultHeading`](@ref) | Return default heading of a result. |
| [`signalNames`](@ref) | Return all signal names. |
| [`timeSignalName`](@ref) | Return the name of the time signal. |
| [`hasOneTimeSignal`](@ref) | Return true if one time signal present. |
| [`hasSignal`](@ref) | Return true if a signal name is known. |
The following functions are available after [`@usingModiaPlot`](@ref) has been executed:
```@meta
CurrentModule = ModiaPlot_PyPlot
```
| Functions | Description |
|:---------------------------------------------|:----------------------------------------------------------|
| [`plot`](@ref) | Plot simulation results in multiple diagrams/figures. |
| [`saveFigure`](@ref) | Save figure in different formats on file. |
| [`closeFigure`](@ref) | Close one figure |
| [`closeAllFigures`](@ref) | Close all figures |
| [`showFigure`](@ref) | Show figure in window (only GLMakie, WGLMakie) |
```@meta
CurrentModule = ModiaResult
```
The following function is typically only used for testing
| Functions | Description |
|:----------------------------------|:----------------------------------------------------------|
| [`ModiaResult.ResultDict`](@ref) | Return a new instance of a ResultDict dictionary. |
## Functions of ModiaResult
The following functions are provided by package `ModiaResult`.
Other useful functions are available in the [Abstract Interface](@ref).
```@docs
@usingModiaPlot
usePlotPackage
usePreviousPlotPackage
currentPlotPackage
resultInfo
printResultInfo
getPlotSignal
```
## Functions of Plot Package
The following functions are available after
```julia
ModiaResult.@usingModiaPlot
```
has been executed. The documentation below was generated with `ModiaPlot_PyPlot`.
```@meta
CurrentModule = ModiaPlot_PyPlot
```
```@docs
plot
saveFigure
closeFigure
closeAllFigures
showFigure
```
## Functions for Testing
```@meta
CurrentModule = ModiaResult
```
```@docs
ResultDict
```
| ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | docs | 2853 | # Getting Started
Note, many examples are available at `$(ModiaResult.path)/test/*.jl`.
## Simple plot
The following example defines a simple line plot of a sine wave:
```julia
import ModiaResult
# Define plotting software globally
ModiaResult.usePlotPackage("GLMakie") # or ENV["MODIA_PLOT"] = "GLMakie"
# Define result data structure
t = range(0.0, stop=10.0, length=100)
result = Dict("time" => t, "phi" => sin.(t))
# Generate line plot
ModiaResult.@usingModiaPlot # = "using ModiaPlot_GLMakie"
plot(result, "phi", heading = "Sine(time)")
```
Executing this code results in the following plot:

## Plot with segmented time axes
A more complex example is shown in the next definition, where the signals have units, are scalars and vectors, have different time axes and are not always defined over the complete time range.
```julia
import ModiaResult
using Unitful
# Define plotting software globally
ModiaResult.usePlotPackage("PyPlot") # or ENV["MODIA_PLOT"] = "PyPlot"
# Define result data structure
t0 = ([0.0, 15.0], [0.0, 15.0], ModiaResult.TimeSignal)
t1 = 0.0 : 0.1 : 15.0
t2 = 0.0 : 0.1 : 3.0
t3 = 5.0 : 0.3 : 9.5
t4 = 11.0 : 0.1 : 15.0
sigA1 = 0.9*sin.(t2)u"m"
sigA2 = cos.(t3)u"m"
sigA3 = 1.1*sin.(t4)u"m"
R2 = [[0.4 * cos(t), 0.5 * sin(t), 0.3 * cos(t)] for t in t2]u"m"
R4 = [[0.2 * cos(t), 0.3 * sin(t), 0.2 * cos(t)] for t in t4]u"m"
sigA = ([t2,t3,t4], [sigA1,sigA2,sigA3 ], ModiaResult.Continuous)
sigB = ([t1] , [0.7*sin.(t1)u"m/s"], ModiaResult.Continuous)
sigC = ([t3] , [sin.(t3)u"N*m"] , ModiaResult.Clocked)
r = ([t2,t4] , [R2,R4] , ModiaResult.Continuous)
result = ModiaResult.ResultDict("time" => t0,
"sigA" => sigA,
"sigB" => sigB,
"sigC" => sigC,
"r" => r,
defaultHeading = "Segmented signals",
hasOneTimeSignal = false)
# Generate line plots
ModiaResult.@usingModiaPlot # = "using ModiaPlot_PyPlot"
plot(result, [("sigA", "sigB", "sigC"), "r[2:3]"])
```
Executing this code results in the following plot:

## SilentNoPlot in runtests
Typically, `runtests.jl` of a simulation package should utilize `SilentNoPlot` to perform all
tests without using a plot package:
```julia
module Runtests # File runtests.jl
import ModiaResult
using Test
@testset "My Tests" begin
ModiaResult.usePlotPackage("SilentNoPlot") # stores current plot package on a stack
< run all tests >
ModiaResult.usePreviousPlotPackage() # retrieves previous plot package from stack
end
end
```
| ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | docs | 272 | # Internal
```@meta
CurrentModule = ModiaResult
```
This chapter documents internal functions that are typically only
for use of the developers of package ModiaResult.
```@docs
getSignalDetailsWithWarning
signalLength
hasSameSegments
hasDimensionMismatch
prepend!
```
| ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.4.3 | 02324a82efdb489c16bb6d008131a1447b125ad5 | docs | 7650 | # ModiaResult Documentation
```@meta
CurrentModule = ModiaResult
```
Package [ModiaResult](https://github.com/ModiaSim/ModiaResult.jl) defines
an abstract interface for **simulation results** with a potentially segmented
time axis (on different segments of the time axis, different variables might be defined)
and provides overloaded methods for:
- Dictionaries with String keys,
- [DataFrame](https://github.com/JuliaData/DataFrames.jl) tables,
- [Tables](https://github.com/JuliaData/Tables.jl) (for example [CSV](https://github.com/JuliaData/CSV.jl)), and
- [`ModiaResult.ResultDict`](@ref) (special dictionary with all features of the interface).
Additionally, **operations** on simulation results are provided, especially to produce **line plots**
in a **convenient way** based on
- [GLMakie](https://github.com/JuliaPlots/GLMakie.jl) (interactive plots in an OpenGL window),
- [WGLMakie](https://github.com/JuliaPlots/WGLMakie.jl) (interactive plots in a browser window),
- [CairoMakie](https://github.com/JuliaPlots/CairoMakie.jl) (static plots on file with publication quality),
- [PyPlot](https://github.com/JuliaPy/PyPlot.jl) (plots with Matplotlib from Python),
- NoPlot (= all plot calls are ignored; NoPlot is a module in ModiaResult), or
- SilentNoPlot (= NoPlot without messages; SilentNoPlot is a module in ModiaResult).
More details:
- [Getting Started](GettingStarted.html)
- [Functions](Functions.html)
- [Abstract Interface](AbstractInterface.html)
- [Internal](Internal.html)
## Example
Assume that the result data structure is available, then the following commands
```julia
import ModiaResult
# Define plotting software globally
ModiaResult.activate("PyPlot") # or ENV["MODIA_PLOT"] = "PyPlot"
# Execute "using ModiaPlot_<globally defined plot package>"
ModiaResult.@usingModiaPlot # = "using ModiaPlot_PyPlot"
# Generate line plots
plot(result, [("sigA", "sigB", "sigC"), "r[2:3]"])
```
generate the following plot:

## Abstract Result Interface
For every result data structure a few access functions have to be defined
(for details see [Abstract Interface](AbstractInterface.html)).
Most importantly:
```
(timeSignal, signal, signalType) = ModiaResult.rawSignal(result, name)
```
Given the result data structure `result` and a variable `name::AbstractString`,
return the result values of the independent variable (= `timeSignal`), the
corresponding result values of the variable (= `signal`) and the type
of the signal `signalType::`[`SignalType`](@ref)).
The following figure sketches the returned `timeSignal` and `signal` data structures:

Other signal types might be mapped to this basic signal type by introducing views.
## Installation
All packages are registered and are installed with:
```julia
julia> ]add ModiaResult
add ModiaPlot_GLMakie # if plotting with GLMakie desired
add ModiaPlot_WGLMakie # if plotting with WGLMakie desired
add ModiaPlot_CairoMakie # if plotting with CairoMakie desired
add ModiaPlot_PyPlot # if plotting with PyPlot desired
```
If you have trouble installing `ModiaPlot_PyPlot`, see
[Installation of PyPlot.jl](https://modiasim.github.io/ModiaResult.jl/stable/index.html#Installation-of-PyPlot.jl)
## Installation of PyPlot.jl
`ModiaPlot_PyPlot.jl` uses `PyPlot.jl` which in turn uses Python.
Therefore a Python installation is needed. Installation
might give problems in some cases. Here are some hints what to do
(you may also consult the documentation of [PyPlot.jl](https://github.com/JuliaPy/PyPlot.jl)).
Before installing `ModiaPlot_PyPlot.jl` make sure that `PyPlot.jl` is working:
```julia
]add PyPlot
using PyPlot
t = [0,1,2,3,4]
plot(t,2*t)
```
If the commands above give a plot window. Everything is fine.
If you get errors or no plot window appears or Julia crashes,
try to first install a standard Python installation from Julia:
```julia
# Start a new Julia session
ENV["PYTHON"] = "" # Let Julia install Python
]build PyCall
exit() # Exit Juila
# Start a new Julia session
]add PyPlot
using PyPlot
t = [0,1,2,3,4]
plot(t,2*t)
```
If the above does not work, or you want to use another Python distribution,
install a [Python 3.x distribution](https://wiki.python.org/moin/PythonDistributions) that contains Matplotlib,
set `ENV["PYTHON"] = "<path-above-python-installation>/python.exe"` and follow the steps above.
Note, `ModiaPlot_PyPlot` is based on the Python 3.x version of Matplotlib where some keywords
are different to the Python 2.x version.
## Release Notes
### Version 0.4.3
- Internal bug fixed.
### Version 0.4.2
- `printResultInfo(..)` and `resultInfo(..)` improved
(signals with one value defined with ModiaResult.OneValueVector are specially marked,
for example parameters).
### Version 0.4.1
- Update of Manifest.toml file
### Version 0.4.0
- Require Julia 1.7
- Upgrade Manifest.toml to version 2.0
- Update Project.toml/Manifest.toml
### Version 0.3.10
- Packages used in test models, prefixed with `ModiaResult.` to avoid missing package errors.
### Version 0.3.9
- Wrong link in README.md corrected
- makie.jl: Adapted to newer Makie version (update!(..) no longer known and needed).
- Issue with ustrip fixed.
- Broken test_52_MonteCarloMeasurementsWithDistributions.jl reactivated
- Manifest.toml updated.
### Version 0.3.8
- Better handling if some input arguments are `nothing`.
- Bug corrected when accessing a vector element, such as `mvec[2]`.
- Documentation slightly improved.
### Version 0.3.7
- Replaced Point2f0 by Makie_Point2f that needs to be defined according to the newest Makie version.
### Version 0.3.6
- Adapt to MonteCarloMeasurements, version >= 1.0 (e.g. pmean(..) instead of mean(..))
- Remove test_71_Tables_Rotational_First.jl from runtests.jl, because "using CSV"
(in order that CSV.jl does not have to be added to the Project.toml file)
### Version 0.3.5
- Project.toml: Added version 1 of MonteCarloMeasurements.
### Version 0.3.4
- Project.toml: Added older versions to DataFrames, in order to reduce conflicts.
### Version 0.3.3
- ModiaResult/test/Project.toml: DataStructures replaced by OrderedCollections.
### Version 0.3.2
- DataStructures replaced by OrderedCollections.
- Version numbers of used packages updated.
### Version 0.3.1
- Two new views on results added (SignalView and FlattenedSignalView).
### Version 0.3
- Major clean-up of the function interfaces. This version is not backwards compatible to previous versions.
### Version 0.2.2
- Overloaded AstractDicts generalized from `AbstractDict{String,T} where {T}` to\
`AbstractDict{T1,T2} where {T1<:AbstractString,T2}`.
- Bug fixed.
### Version 0.2.1
- Bug fixed: `<: Vector` changed to `<: AbstractVector`
### Version 0.2.0
- Abstract Interface slightly redesigned (therefore 0.2.0 is not backwards compatible to 0.1.0).
- Modules NoPlot and SilentNoPlot added as sub-modules of ModiaResult. These modules are
activated if plot package "NoPlot" or "SilentNoPlot" are selected.
- Content of directory src_plot moved into src. Afterwards src_plot was removed.
- Directory test_plot merged into test (and then removed).
### Version 0.1.0
- Initial version (based on the result plotting developed for [ModiaMath](https://github.com/ModiaSim/ModiaMath.jl)).
## Main developer
[Martin Otter](https://rmc.dlr.de/sr/en/staff/martin.otter/),
[DLR - Institute of System Dynamics and Control](https://www.dlr.de/sr/en)
| ModiaResult | https://github.com/ModiaSim/ModiaResult.jl.git |
|
[
"MIT"
]
| 0.1.0 | bb3f9a281118a9edfd63969405ce09bd35e20e4c | code | 150 | module Hygese
include("main.jl")
export solve_cvrp, solve_tsp,
reporting,
AlgorithmParameters
end | Hygese | https://github.com/chkwon/Hygese.jl.git |
|
[
"MIT"
]
| 0.1.0 | bb3f9a281118a9edfd63969405ce09bd35e20e4c | code | 4186 | # # System Independent Types
# @assert Cint == Int32
# @assert Cdouble == Float64
# Must match with AlgorithmParameters.h in HGS-CVRP: https://github.com/vidalt/HGS-CVRP
Base.@kwdef mutable struct AlgorithmParameters
nbGranular :: Int32 = 20
mu :: Int32 = 25
lambda :: Int32 = 40
nbElite :: Int32 = 4
nbClose :: Int32 = 5
targetFeasible :: Float64 = 0.2
seed :: Int32 = 0
nbIter :: Int32 = 20000
timeLimit :: Float64 = 0.0
useSwapStar :: Int32 = 1 # 1 = true, 0 = false
end
mutable struct C_SolutionRoute
length :: Cint
path :: Ptr{Cint}
end
mutable struct C_Solution
cost :: Cdouble
time :: Cdouble
n_routes :: Cint
routes :: Ptr{C_SolutionRoute}
end
mutable struct RoutingSolution
cost :: Float64
time :: Float64
routes :: Vector{Vector{Int}}
function RoutingSolution(sol_ptr::Ptr{C_Solution})
sol = unsafe_load(sol_ptr)
routes = Vector{Vector{Int}}(undef, sol.n_routes)
for i in eachindex(routes)
r = unsafe_load(sol.routes, i)
path = unsafe_wrap(Array, r.path, r.length)
routes[i] = unsafe_wrap(Array, r.path, r.length) .+ 1 # customer numbering offset
end
return new(sol.cost, sol.time, routes)
end
end
function convert_destroy(c_sol_ptr::Ptr{C_Solution})
# copy C structs to Julia structs
j_sol = RoutingSolution(c_sol_ptr)
# don't forget to delete pointers, important to avoid memory leaks
ccall((:delete_solution, LIBHGSCVRP), Cvoid, (Ptr{C_Solution},), c_sol_ptr)
return j_sol
end
"""
function c_api_solve_cvrp(
n::Integer,
x::Vector,
y::Vector,
service_time::Vector,
demand::Vector,
vehicle_capacity::Float64,
duration_limit::Float64,
isRoundingInteger::Bool,
isDurationConstraint::Bool,
n_vehicles::Integer,
parameters::AlgorithmParameters,
verbose::Bool
)
`x`, `y`, `service_time`, `demand` all require at least `n` elements.
Anything after `n` elements are ignored.
The first element should be the depot.
The next `n-1` elements should be customers.
"""
function c_api_solve_cvrp(
n::Integer,
x::Vector,
y::Vector,
service_time::Vector,
demand::Vector,
vehicle_capacity::Real,
duration_limit::Real,
isRoundingInteger::Bool,
isDurationConstraint::Bool,
n_vehicles::Integer,
parameters::AlgorithmParameters,
verbose::Bool
)
@assert service_time[1] == 0.0
@assert demand[1] == 0.0
c_solution_ptr = ccall(
(:solve_cvrp, LIBHGSCVRP),
Ptr{C_Solution},
(
Cint, Ptr{Cdouble}, Ptr{Cdouble}, Ptr{Cdouble}, Ptr{Cdouble},
Cdouble, Cdouble, Cchar, Cchar,
Cint, Ptr{AlgorithmParameters}, Cchar
),
n, Cdouble.(x), Cdouble.(y), Cdouble.(service_time), Cdouble.(demand),
vehicle_capacity, duration_limit, isRoundingInteger, isDurationConstraint,
n_vehicles, Ref(parameters), verbose
)
return convert_destroy(c_solution_ptr)
end
function c_api_solve_cvrp_dist_mtx(
n::Integer,
x::Vector,
y::Vector,
dist_mtx::Matrix, # row-first matrix as in C
service_time::Vector,
demand::Vector,
vehicle_capacity::Real,
duration_limit::Real,
isDurationConstraint::Bool,
n_vehicles::Integer,
parameters::AlgorithmParameters,
verbose::Bool
)
@assert service_time[1] == 0.0
@assert demand[1] == 0.0
if length(x) == length(y) == n
x_ptr = Cdouble.(x)
y_ptr = Cdouble.(y)
else
x_ptr = y_ptr = C_NULL
end
c_solution_ptr = ccall(
(:solve_cvrp_dist_mtx, LIBHGSCVRP),
Ptr{C_Solution},
(
Cint, Ptr{Cdouble}, Ptr{Cdouble}, Ptr{Cdouble}, Ptr{Cdouble}, Ptr{Cdouble},
Cdouble, Cdouble, Cchar,
Cint, Ptr{AlgorithmParameters}, Cchar
),
n, x_ptr, y_ptr, Cdouble.(dist_mtx), Cdouble.(service_time), Cdouble.(demand),
vehicle_capacity, duration_limit, isDurationConstraint,
n_vehicles, Ref(parameters), verbose
)
return convert_destroy(c_solution_ptr)
end
| Hygese | https://github.com/chkwon/Hygese.jl.git |
|
[
"MIT"
]
| 0.1.0 | bb3f9a281118a9edfd63969405ce09bd35e20e4c | code | 2965 |
function solve_cvrp(
cvrp::CVRP, parameters=AlgorithmParameters();
n_vehicles=C_INT_MAX,
verbose=true, use_dist_mtx=false, round=true
)
n = cvrp.dimension
x = cvrp.coordinates[:, 1]
y = cvrp.coordinates[:, 2]
demands = cvrp.demand
vehicle_capacity = cvrp.capacity
if cvrp.distance < Inf
isDurationConstraint = true
duration_limit = cvrp.distance
else
isDurationConstraint = false
duration_limit = C_DBL_MAX
end
service_times = ones(size(x)) .* cvrp.service_time
service_times[1] = 0.0
if use_dist_mtx
dist_mtx = zeros(n, n)
for i in 1:n, j in 1:n
dist_mtx[i, j] = cvrp.weights[i, j]
end
# need to input dist_mtx' instead of dist_mtx
# Julia: column-major indexing
# C: row-major indexing
return c_api_solve_cvrp_dist_mtx(
n, x, y, Matrix(dist_mtx'), service_times, demands,
vehicle_capacity, duration_limit, isDurationConstraint,
n_vehicles, parameters, verbose
)
else
return c_api_solve_cvrp(
n, x, y, service_times, demands,
vehicle_capacity, duration_limit, round, isDurationConstraint,
n_vehicles, parameters, verbose)
end
end
function solve_cvrp(
x::Vector, y::Vector, demands::Vector,
vehicle_capacity::Real,
parameters=AlgorithmParameters();
verbose=true,
round=true,
service_times=zeros(length(demands)),
duration_limit=Inf,
n_vehicles=C_INT_MAX
)
@assert length(x) == length(y) == length(service_times) == length(demands)
if duration_limit < Inf
isDurationConstraint = true
else
isDurationConstraint = false
duration_limit = C_DBL_MAX
end
return c_api_solve_cvrp(
length(demands), x, y, service_times, demands,
vehicle_capacity, duration_limit, round, isDurationConstraint,
n_vehicles, parameters, verbose
)
end
function solve_cvrp(
dist_mtx::Matrix, demands::Vector, vehicle_capacity::Real,
parameters=AlgorithmParameters();
verbose=true,
x_coordinates=Float64[],
y_coordinates=Float64[],
service_times=zeros(length(demands)),
duration_limit=Inf,
n_vehicles=C_INT_MAX
)
if length(x_coordinates) == 0 && length(y_coordinates) == 0
@assert length(service_times) == length(demands)
else
@assert length(x_coordinates) == length(y_coordinates) == length(service_times) == length(demands)
end
if duration_limit < Inf
isDurationConstraint = true
else
isDurationConstraint = false
duration_limit = C_DBL_MAX
end
return c_api_solve_cvrp_dist_mtx(
length(demands), x_coordinates, y_coordinates, Matrix(dist_mtx'), service_times, demands,
vehicle_capacity, duration_limit, isDurationConstraint,
n_vehicles, parameters, verbose
)
end
| Hygese | https://github.com/chkwon/Hygese.jl.git |
|
[
"MIT"
]
| 0.1.0 | bb3f9a281118a9edfd63969405ce09bd35e20e4c | code | 371 | using CVRPLIB, TSPLIB
using HGSCVRP_jll
const LIBHGSCVRP = HGSCVRP_jll.get_libhgscvrp_path()
include("c_api.jl")
include("cvrp.jl")
include("tsp.jl")
const C_DBL_MAX = floatmax(Cdouble)
const C_INT_MAX = typemax(Cint)
function reporting(visited_customers)
routes = deepcopy(visited_customers)
for r in routes
r .-= 1
end
return routes
end | Hygese | https://github.com/chkwon/Hygese.jl.git |
|
[
"MIT"
]
| 0.1.0 | bb3f9a281118a9edfd63969405ce09bd35e20e4c | code | 2328 |
function solve_tsp(tsp::TSP, parameters=AlgorithmParameters(); verbose=true, use_dist_mtx=false)
n = tsp.dimension
x = tsp.nodes[:, 1]
y = tsp.nodes[:, 2]
serv_time = zeros(size(x))
dem = ones(size(x))
dem[1] = 0.0
vehicleCapacity = n
n_vehicles = 1
isRoundingInteger = true
isDurationConstraint = false
duration_limit = C_DBL_MAX
if use_dist_mtx
c_dist_mtx = Matrix(tsp.weights')
for i in 1:n
c_dist_mtx[i, i] = 0.0
end
# need to input dist_mtx' instead of dist_mtx
# Julia: column-first indexing
# C: row-first indexing
return c_api_solve_cvrp_dist_mtx(
n, x, y, c_dist_mtx, serv_time, dem, vehicleCapacity, duration_limit, isDurationConstraint,
n_vehicles, parameters, verbose
)
else
return c_api_solve_cvrp(
n, x, y, serv_time, dem,
vehicleCapacity, duration_limit, isRoundingInteger, isDurationConstraint, n_vehicles, parameters, verbose
)
end
end
function solve_tsp(dist_mtx::Matrix, parameters=AlgorithmParameters(); verbose=true, x_coordinates=Float64[], y_coordinates=Float64[])
n = size(dist_mtx, 1)
serv_time = zeros(n)
dem = ones(n)
dem[1] = 0.0
vehicleCapacity = n
n_vehicles = 1
c_dist_mtx = Matrix(dist_mtx')
for i in 1:n
c_dist_mtx[i, i] = 0.0
end
duration_limit = C_DBL_MAX
isDurationConstraint = false
# need to input dist_mtx' instead of dist_mtx
# Julia: column-first indexing
# C: row-first indexing
return c_api_solve_cvrp_dist_mtx(
n, x_coordinates, y_coordinates, c_dist_mtx, serv_time, dem,
vehicleCapacity, duration_limit, isDurationConstraint,
n_vehicles, parameters, verbose
)
end
function solve_tsp(x::Vector, y:: Vector, parameters=AlgorithmParameters(); verbose=true)
n = length(x)
serv_time = zeros(n)
dem = ones(n)
dem[1] = 0.0
vehicleCapacity = n
n_vehicles = 1
isRoundingInteger = true
duration_limit = C_DBL_MAX
isDurationConstraint = false
return c_api_solve_cvrp(
n, x, y, serv_time, dem,
vehicleCapacity, duration_limit, isRoundingInteger, isDurationConstraint,
n_vehicles, parameters, verbose
)
end
| Hygese | https://github.com/chkwon/Hygese.jl.git |
|
[
"MIT"
]
| 0.1.0 | bb3f9a281118a9edfd63969405ce09bd35e20e4c | code | 2988 | @testset "durations" begin
cvrp, _, _ = CVRPLIB.readCVRPLIB("CMT6")
ap = AlgorithmParameters(timeLimit=3)
result = solve_cvrp(cvrp, ap, verbose=true, use_dist_mtx=false, round=false)
@show result.cost
@test result.cost ≈ 555.43 atol=1e-2
cvrp, _, _ = CVRPLIB.readCVRPLIB("CMT7")
service_times = cvrp.service_time .* ones(cvrp.dimension)
service_times[1] = 0.0
ap = AlgorithmParameters(timeLimit=3)
result = solve_cvrp(
cvrp.coordinates[:, 1],
cvrp.coordinates[:, 2],
cvrp.demand,
cvrp.capacity,
ap;
verbose = true,
round = false,
duration_limit = cvrp.distance,
service_times = service_times
)
@show result.cost
@test result.cost ≈ 909.68 atol=1e-2
end
@testset "P-n19-k2 by coordinates" begin
cvrp, _, _ = CVRPLIB.readCVRPLIB("P-n19-k2")
ap = AlgorithmParameters(timeLimit=1.8)
result = solve_cvrp(cvrp, ap; verbose=true)
@test result.cost <= 212 * 1.01
end
@testset "P-n19-k2 by dist_mtx with coordinates" begin
cvrp, _, _ = CVRPLIB.readCVRPLIB("P-n19-k2")
ap = AlgorithmParameters(timeLimit=2.1)
result = solve_cvrp(cvrp, ap; verbose=true, use_dist_mtx=true)
@test result.cost <= 212 * 1.01
end
@testset "P-n19-k2 by dist_mtx without coordinates" begin
cvrp, _, _ = CVRPLIB.readCVRPLIB("P-n19-k2")
cvrp.coordinates = zeros(size(cvrp.coordinates))
ap = AlgorithmParameters(timeLimit=1.23)
result = solve_cvrp(cvrp, ap; verbose=true, use_dist_mtx=true)
@test result.cost <= 212 * 1.01
end
@testset "X-n101-k25" begin
cvrp, _, _ = CVRPLIB.readCVRPLIB("X-n101-k25")
ap = AlgorithmParameters(timeLimit=3)
result = solve_cvrp(cvrp, ap; verbose=true)
@show result.cost
@show result.time
visited_customers = result.routes
@show typeof(visited_customers), size(visited_customers)
report_visited_customers = reporting(visited_customers)
for i in eachindex(report_visited_customers)
@test report_visited_customers[i] == visited_customers[i] .- 1
end
end
@testset "A-n32-k5.vrp" begin
cvrp = CVRPLIB.readCVRP("A-n32-k5.vrp")
ap = AlgorithmParameters(timeLimit=2.3)
result = solve_cvrp(cvrp, ap; verbose=true)
@test result.cost <= 784 * 1.01
end
@testset "x, y, dist_mtx CVRP" begin
cvrp, _, _ = CVRPLIB.readCVRPLIB("A-n32-k5")
x = cvrp.coordinates[:, 1]
y = cvrp.coordinates[:, 2]
dist_mtx = cvrp.weights
demand = cvrp.demand
capacity = cvrp.capacity
n_vehicles = 5
ap = AlgorithmParameters(timeLimit=1.8)
result1 = solve_cvrp(x, y, demand, cvrp.capacity, ap;
n_vehicles=n_vehicles, verbose=true)
result2 = solve_cvrp(dist_mtx, demand, cvrp.capacity, ap; verbose=true)
result3 = solve_cvrp(dist_mtx, demand, cvrp.capacity, ap; x_coordinates=x, y_coordinates=y, verbose=true, n_vehicles=n_vehicles)
@test result1.cost == result2.cost == result3.cost
end
| Hygese | https://github.com/chkwon/Hygese.jl.git |
|
[
"MIT"
]
| 0.1.0 | bb3f9a281118a9edfd63969405ce09bd35e20e4c | code | 240 | using Hygese
using Test
using CVRPLIB, TSPLIB
@testset "Hygese.jl" begin
# Write your tests here.
@testset "CVRP" begin
include("cvrp_test.jl")
end
@testset "TSP" begin
include("tsp_test.jl")
end
end
| Hygese | https://github.com/chkwon/Hygese.jl.git |
|
[
"MIT"
]
| 0.1.0 | bb3f9a281118a9edfd63969405ce09bd35e20e4c | code | 1192 | @testset "Symmetric TSP: pr76, by coordinates" begin
tsp = TSPLIB.readTSPLIB(:pr76)
ap = AlgorithmParameters(timeLimit=1)
result = solve_tsp(tsp, ap)
@show result.cost
@show result.routes
@test result.cost <= 108159 * 1.02
end
@testset "Asymmetric TSP: br17, by dist_mtx" begin
tsp = TSPLIB.readTSP("br17.atsp")
ap = AlgorithmParameters(timeLimit=1)
result = solve_tsp(tsp, ap; use_dist_mtx=true)
@show result.cost
@show result.routes
@test result.cost <= 39 * 1.02
end
@testset "Asymmetric TSP: ftv64, by dist_mtx" begin
tsp = TSPLIB.readTSP("ftv64.atsp")
ap = AlgorithmParameters(timeLimit=1)
result = solve_tsp(tsp, ap; use_dist_mtx=true)
@show result.cost
@show result.routes
@test result.cost <= 1839 * 1.02
end
@testset "x, y, dist_mtx TSP" begin
tsp = TSPLIB.readTSPLIB(:pr76)
dist_mtx = tsp.weights
x = tsp.nodes[:, 1]
y = tsp.nodes[:, 2]
ap = AlgorithmParameters(timeLimit=1)
result1 = solve_tsp(x, y, ap)
result2 = solve_tsp(dist_mtx, ap)
result3 = solve_tsp(dist_mtx, ap; x_coordinates=x, y_coordinates=y)
@test result1.cost == result2.cost == result3.cost
end
| Hygese | https://github.com/chkwon/Hygese.jl.git |
|
[
"MIT"
]
| 0.1.0 | bb3f9a281118a9edfd63969405ce09bd35e20e4c | docs | 5533 | # Hygese.jl
[](https://github.com/chkwon/Hygese.jl/actions?query=workflow%3ACI)
[](https://codecov.io/gh/chkwon/Hygese.jl)
*This package is under active development. It can introduce breaking changes anytime. Please use it at your own risk.*
**A solver for the Capacitated Vehicle Routing Problem (CVRP)**
This package provides a simple Julia wrapper for the Hybrid Genetic Search solver for Capacitated Vehicle Routing Problems [(HGS-CVRP)](https://github.com/vidalt/HGS-CVRP).
This package requires a C++ compiler and `cmake` installed on your computer.
Install:
```julia
] add https://github.com/chkwon/Hygese.jl
```
Use:
```julia
using Hygese, CVRPLIB
ap = AlgorithmParameters(timeLimit=1.3, seed=3) # `timeLimit` in seconds, `seed` is the seed for random values.
cvrp = CVRPLIB.readCVRP(<path to .vrp file>)
result = solve_cvrp(cvrp, ap; verbose=true) # verbose=false to turn off all outputs
```
- `result.cost` = the total cost of routes
- `result.time` = the computational time taken by HGS
- `results.routes` = the list of visited customers by each route, not including the depot (index 1).
In the [CVRPLIB](http://vrp.atd-lab.inf.puc-rio.br/index.php/en/) instances, the node numbering starts from `1`, and the depot is typically node `1`. However, the solution reported in CVRPLIB uses numbering starts from `0`.
For example, [`P-n19-k2`](http://vrp.atd-lab.inf.puc-rio.br/media/com_vrp/instances/P/P-n19-k2.vrp) instance has the following nodes:
```
1 30 40
2 37 52
3 49 43
4 52 64
5 31 62
6 52 33
7 42 41
8 52 41
9 57 58
10 62 42
11 42 57
12 27 68
13 43 67
14 58 27
15 37 69
16 61 33
17 62 63
18 63 69
19 45 35
```
and the depot is node `1`. But the [solution reported](http://vrp.atd-lab.inf.puc-rio.br/media/com_vrp/instances/P/P-n19-k2.sol) is:
```
Route #1: 4 11 14 12 3 17 16 8 6
Route #2: 18 5 13 15 9 7 2 10 1
Cost 212
```
The last element `1` in Route #2 above represents the node number `2` with coordinate `(37, 52)`.
This package returns `visited_customers` with the original node numbering.
For the above example,
```julia
using Hygese, CVRPLIB
cvrp, cvrp_file, cvrp_sol_file = CVRPLIB.readCVRPLIB("P-n19-k2")
result = solve_cvrp(cvrp)
```
returns
```julia
julia> result.routes
2-element Vector{Vector{Int64}}:
[19, 6, 14, 16, 10, 8, 3, 11, 2]
[7, 9, 17, 18, 4, 13, 15, 12, 5]
```
To retrieve the CVRPLIB solution reporting format:
```julia
julia> reporting(result.routes)
2-element Vector{Vector{Int64}}:
[18, 5, 13, 15, 9, 7, 2, 10, 1]
[6, 8, 16, 17, 3, 12, 14, 11, 4]
```
## CVRP interfaces
In all data the first element is for the depot.
- `x` = x coordinates of nodes, size of `n`
- `y` = x coordinates of nodes, size of `n`
- `dist_mtx` = the distance matrix, size of `n` by `n`.
- `service_times` = service time in each node
- `demands` = the demand in each node
- `vehicle_capacity` = the capacity of the vehicles
- `duration_limit` = the duration limit for each vehicle
- `n_vehicles` = the maximum number of available vehicles
Three possibilities:
- Only by the x, y coordinates. The Euclidean distances are used.
```julia
ap = AlgorithmParameters(timeLimit=3.2) # seconds
result = solve_cvrp(x, y, demands, vehicle_capacity, n_vehicles, ap; service_times=service_times, duration_limit=duration_limit, verbose=true)
```
- Only by the distance matrix.
```julia
ap = AlgorithmParameters(timeLimit=3.2) # seconds
result = solve_cvrp(dist_mtx, demand, vehicle_capacity, n_vehicles, ap; service_times=service_times, duration_limit=duration_limit, verbose=true)
```
- Using the distance matrix, with optional x, y coordinate information. The objective function is calculated based on the distance matrix, but the x, y coordinates just provide some helpful information. The distance matrix may not be consistent with the coordinates.
```julia
ap = AlgorithmParameters(timeLimit=3.2) # seconds
result = solve_cvrp(dist_mtx, demand, vehicle_capacity, n_vehicles, ap; x_coordinates=x, y_coordinates=y, service_times=service_times, duration_limit=duration_limit, verbose=true)
```
## TSP interfaces
As TSP is a special case of CVRP, the same solver can be used for solving TSP.
The following interfaces are provided:
- Reading `.tsp` or `.atsp` files via `TSPLIB.jl`:
```julia
tsp = TSPLIB.readTSP("br17.atsp")
ap = AlgorithmParameters(timeLimit=1.2)
result = solve_tsp(tsp, ap; use_dist_mtx=true)
```
- By the coordinates, by the distance matrix, or by both:
```julia
result1 = solve_tsp(x, y, ap)
result2 = solve_tsp(dist_mtx, ap)
result3 = solve_tsp(dist_mtx, ap; x_coordinates=x, y_coordinates=y)
```
## AlgorithmParamters
The paramters for the HGS algorithm with default values are:
```julia
Base.@kwdef mutable struct AlgorithmParameters
nbGranular :: Int32 = 20
mu :: Int32 = 25
lambda :: Int32 = 40
nbElite :: Int32 = 4
nbClose :: Int32 = 5
targetFeasible :: Float64 = 0.2
seed :: Int32 = 0
nbIter :: Int32 = 20000
timeLimit :: Float64 = 0.0
useSwapStar :: Int32 = 1 # 1 = true, 0 = false
end
```
where `const C_DBL_MAX = floatmax(Cdouble)`.
## Related Packages
- [CVRPLIB.jl](https://github.com/chkwon/CVRPLIB.jl)
- [TSPLIB.jl](https://github.com/matago/TSPLIB.jl)
- [LKH.jl](https://github.com/chkwon/LKH.jl)
- [Concorde.jl](https://github.com/chkwon/Concorde.jl)
- [PyHygese](https://github.com/chkwon/PyHygese): A Python wrapper for HGS-CVRP
| Hygese | https://github.com/chkwon/Hygese.jl.git |
|
[
"MIT"
]
| 1.1.5 | 4ac524cb90051721afa82c8a6c999df35dafbecd | code | 668 | using Telegram
using Documenter
makedocs(;
modules=[Telegram],
authors="Andrey Oskin",
repo="https://github.com/Arkoniak/Telegram.jl/blob/{commit}{path}#L{line}",
sitename="Telegram.jl",
format=Documenter.HTML(;
prettyurls=get(ENV, "CI", "false") == "true",
canonical="https://Arkoniak.github.io/Telegram.jl",
siteurl="https://github.com/Arkoniak/Telegram.jl",
assets=String[],
),
pages=[
"Home" => "index.md",
"API Reference" => "reference.md",
"Usage" => "usage.md",
"Developer guide" => "developers.md"
],
)
deploydocs(;
repo="github.com/Arkoniak/Telegram.jl",
)
| Telegram | https://github.com/Arkoniak/Telegram.jl.git |
|
[
"MIT"
]
| 1.1.5 | 4ac524cb90051721afa82c8a6c999df35dafbecd | code | 276 | include("tg_scrape.jl")
const main_html = getmain()
const page = matchFirst(sel"div#dev_page_content", main_html)
const funcs = process_page(page)
create_api(funcs, joinpath("..", "src", "telegram_api.jl"))
create_docs(funcs, joinpath("..", "docs", "src", "reference.md"))
| Telegram | https://github.com/Arkoniak/Telegram.jl.git |
|
[
"MIT"
]
| 1.1.5 | 4ac524cb90051721afa82c8a6c999df35dafbecd | code | 5953 | using UrlDownload
using Gumbo
using Cascadia
using Cascadia: matchFirst
using Underscores
parser(x) = parsehtml(String(x)).root
function getmain()
urldownload("https://core.telegram.org/bots/api", parser = parser)
end
issmall(s) = s[1] in 'a':'z'
function process_page(page = matchFirst(sel"div#dev_page_content", getmain()))
topic = ""
skip = true
res = []
for c in children(page)
if tag(c) == :h3
topic = nodeText(c)
skip = true
elseif tag(c) == :h4
name = nodeText(c)
if issmall(name)
skip = false
methodname = name
mthd = [:topic => topic, :name => methodname,
:href => "https://core.telegram.org/bots/api" * matchFirst(sel"a", c).attributes["href"],
:description => []]
push!(res, mthd)
else
skip = true
end
elseif !skip
push!(res[end][end].second, c)
end
end
return Dict.(res)
end
function print_href(io, text, link, methods)
if text in methods
print(io, "[`", text, "`](@ref)")
else
print(io, "[", text, "](", "https://core.telegram.org/bots/api"*link, ")")
end
end
function process_table(x, methods, io)
optional = IOBuffer()
required = IOBuffer()
isoptional = false
isrequired = false
body = matchFirst(sel"tbody", x)
for row in body.children
cols = eachmatch(sel"td", row)
req = nodeText(cols[3])
if req == "Yes"
cio = required
isrequired = true
elseif req == "Optional"
cio = optional
isoptional = true
else
@error "Unknown requirement type: $req"
cio = optional
isoptional = true
end
# TODO Better types
print(cio, "- `", nodeText(cols[1]),"`: (", nodeText(cols[2]), ") ")
html2md(cols[4], methods, cio)
print(cio, "\n")
end
if isrequired
print(io, "# Required arguments\n")
print(io, strip(String(take!(required))))
print(io, "\n\n")
end
if isoptional
print(io, "# Optional arguments\n")
print(io, strip(String(take!(optional))))
print(io, "\n")
end
return io
end
function process_description(x::Vector, methods, io = IOBuffer())
@_ foreach(html2md(_, methods, io), x)
return @_ io |> String(take!(__)) |> strip
end
html2md(x::HTMLText, methods, io) = print(io, x.text)
function html2md(x, methods, io = IOBuffer())
if tag(x) == :p
@_ foreach(html2md(_, methods, io), x.children)
print(io, "\n\n")
elseif tag(x) == :a
if x.attributes["href"][1] == '#'
print_href(io, nodeText(x), x.attributes["href"], methods)
else
print(io, nodeText(x))
end
elseif tag(x) == :table
process_table(x, methods, io)
elseif tag(x) == :code
print(io, "`", nodeText(x), "`")
else
@_ foreach(html2md(_, methods, io), x.children)
end
return io
end
function create_api(funcs, output)
f = open(output, "w")
println(f, "const TELEGRAM_API = [")
methods = @_ map(_[:name], funcs)
for m in funcs
println(f, "(:", m[:name], ", \"\"\"")
print(f, "\t", m[:name], "([tg::TelegramClient]; kwargs...)\n\n")
descr = process_description(m[:description], methods)
println(f, descr)
println(f, "\n[Function documentation source]($(m[:href]))")
println(f, "\"\"\"),")
end
print(f, "]")
close(f)
end
const DOC_PREAMBULE = """
```@meta
CurrentModule = Telegram
```
Word of caution: this documentation is generated automatically from [https://core.telegram.org/bots/api](https://core.telegram.org/bots/api) and can be incomplete or wrongly formatted. Also this documentation do not contain information about general principles of the Telegram API and response objects. So, if you have any doubts, consult original [api documentation](https://core.telegram.org/bots/api) and consider it as a ground truth. These docs were generated only for simpler navigation and better help hints in REPL and editors.
Please notice that this package implements the [Bot API](https://core.telegram.org/api#bot-api). The Telegram Bot API is an API specifically for bots, which is simpler but less customisable. It acts as an intermediary between bots and the [Telegram API](https://core.telegram.org/api#telegram-api) which allow you to build your own customized Telegram clients.
All API functions have [`TelegramClient`](@ref) as optional positional argument, which means that if it is not set explicitly, than global client is used, which is usually created during initial construction or by explicit call of [`useglobally!`](@ref) function.
All arguments usually have `String`/`Boolean`/`Integer` types which is in one to one correspondence with julian types. Special arguments like `document`, `photo` and the like, which are intended for file sending, can accept either `IOStream` argument as in `open("picture.png", "r")` or `Pair{String, IO}` in case of in-memory `IO` objects without names. Read [Usage](@ref) for additional info.
# API Reference
"""
function create_docs(funcs, output)
f = open(output, "w")
println(f, DOC_PREAMBULE)
methods = @_ map(_[:name], funcs)
prev_topic = ""
io = IOBuffer()
for m in funcs
if prev_topic != m[:topic]
print(f, "\n")
print(f, strip(String(take!(io))))
print(f, "\n\n## ", m[:topic], "\n\n")
prev_topic = m[:topic]
io = IOBuffer()
end
println(f, "* [`Telegram.", m[:name], "`](@ref)")
println(io, "```@docs")
println(io, m[:name])
print(io, "```\n\n")
end
print(f, "\n")
print(f, strip(String(take!(io))))
close(f)
end
| Telegram | https://github.com/Arkoniak/Telegram.jl.git |
|
[
"MIT"
]
| 1.1.5 | 4ac524cb90051721afa82c8a6c999df35dafbecd | code | 433 | module Telegram
using HTTP
using JSON3
using Base.CoreLogging:
global_logger,
LogLevel, BelowMinLevel, Debug, Info, Warn, Error, AboveMaxLevel
import Base.CoreLogging:
AbstractLogger,
handle_message, shouldlog, min_enabled_level, catch_exceptions
export TelegramClient, useglobally!, TelegramLogger, run_bot
include("client.jl")
include("api.jl")
using .API
include("logging.jl")
include("bot.jl")
end # module
| Telegram | https://github.com/Arkoniak/Telegram.jl.git |
|
[
"MIT"
]
| 1.1.5 | 4ac524cb90051721afa82c8a6c999df35dafbecd | code | 554 | module API
using ..Telegram
include("telegram_api.jl")
for (f, fdoc) in TELEGRAM_API
fs=string(f)
@eval begin
function $f(client::Telegram.TelegramClient = Telegram.DEFAULT_OPTS.client; kwargs...)
params = Dict{Symbol, Any}(kwargs)
params[:chat_id] = get(params, :chat_id, Telegram.chatid(client))
params[:parse_mode] = get(params, :parse_mode, client.parse_mode)
Telegram.query(client, $fs, params = params)
end
@doc $fdoc $f
export $f
end
end
end # module
| Telegram | https://github.com/Arkoniak/Telegram.jl.git |
|
[
"MIT"
]
| 1.1.5 | 4ac524cb90051721afa82c8a6c999df35dafbecd | code | 2101 | """
run_bot(f::Function, [tg::TelegramClient]; timeout = 10, brute_force_alive = false, offset = -1)
Run telegram bot, which executes function `f` repeatedly.
# Arguments
- `f`: function to run with the bot. As an input it receive [Message](https://core.telegram.org/bots/api#message) in the form of JSON3 object.
- `tg`: Telegram client, if not set then global telegram client is used.
- `timeout`: timeout limit of messages, defines when longpoll messages should be interrupted
- `brute_force_alive`: despite all measures, messages sometimes "hangs". You may use this argument to wake up telegram server regularly. When this option is set to `true` it works, but it is not recommended, since it makes additional calls. Consider this feature experimental and use at your own risk.
- `offset`: telegram message offset, useful if you have processed messages, but bot was interrupted and messages state was lost.
"""
function run_bot(f, tg::TelegramClient = DEFAULT_OPTS.client; timeout = 20, brute_force_alive = false, offset = -1)
if brute_force_alive
@async while true
try
getMe(tg)
sleep(timeout ÷ 2)
catch err
@error err
end
end
end
while true
try
ignore_errors = true
res = offset == -1 ? getUpdates(tg, timeout = timeout) : (ignore_errors = false;getUpdates(tg, timeout = timeout, offset = offset) )
for msg in res
try
f(msg)
offset = offset <= get(msg, :update_id, -1) ? get(msg, :update_id, -1) + 1 : offset
catch err
@error err
if ignore_errors
offset = offset <= get(msg, :update_id, -1) ? get(msg, :update_id, -1) + 1 : offset
else
rethrow()
end
end
end
catch err
@error err
if err isa InterruptException
break
end
end
end
end
| Telegram | https://github.com/Arkoniak/Telegram.jl.git |
|
[
"MIT"
]
| 1.1.5 | 4ac524cb90051721afa82c8a6c999df35dafbecd | code | 4375 | struct TelegramError{T} <: Exception
msg::T
end
mutable struct TelegramClient
token::String
chat_id::String
parse_mode::String
ep::String
end
"""
TelegramClient(token; chat_id, parse_mode, ep, use_globally = true)
Creates telegram client, which can be used to run telegram commands.
# Arguments
- `token::String`: telegram token, which can be obtained in telegram from @BotFather.
- `chat_id`: if set, used as default `chat_id` argument for all chat related commands. To get specific `chat_id`, send message to the bot in telegram application and use [`getUpdates`](@ref) command.
- `parse_mode`: if set, used as default for text messaging commands.
- `use_globally::Bool`: default `true`. If set to `true` then it current client can be used as default in all telegram commands.
- `ep`: endpoint for telegram api. By default `https://api.telegram.org/bot` is used, but you may change it, if you are using proxy or for testing purposes.
"""
function TelegramClient(token = get(ENV, "TELEGRAM_BOT_TOKEN", ""); chat_id = get(ENV, "TELEGRAM_BOT_CHAT_ID" ,""), parse_mode = "", ep = "https://api.telegram.org/bot", use_globally = true)
client = TelegramClient(token, chat_id, parse_mode, ep)
if use_globally
useglobally!(client)
end
return client
end
mutable struct TelegramOpts
client::TelegramClient
upload_kw::Vector{Symbol}
timeout::Int
end
const DEFAULT_OPTS = TelegramOpts(TelegramClient(use_globally = false), [:photo, :audio, :thumb, :document, :video, :animation, :voice, :video_note, :sticker, :png_sticker, :tgs_sticker, :certificate, :files], 30)
"""
useglobally!(tg::TelegramClient)
Set `tg` as default client in all `Telegram.API` functions.
# Example
```julia
tg = TelegramClient(ENV["TG_TOKEN"])
useglobally!(tg)
getMe() # new client is used in this command by default.
```
"""
function useglobally!(client::TelegramClient)
DEFAULT_OPTS.client = client
return client
end
function token(client::TelegramClient)
isempty(client.token) || return client.token
token = get(ENV, "TELEGRAM_BOT_TOKEN", "")
isempty(token) && @warn "Telegram token is empty"
return token
end
function chatid(client::TelegramClient)
isempty(client.chat_id) || return client.chat_id
chat_id = get(ENV, "TELEGRAM_BOT_CHAT_ID", "")
return chat_id
end
ioify(elem::IO) = elem
ioify(elem) = IOBuffer(elem)
function ioify(elem::IOBuffer)
seekstart(elem)
return elem
end
pushfiles!(body, keyword, file) = push!(body, keyword => file)
function pushfiles!(body, keyword, file::Pair)
push!(body, keyword => HTTP.Multipart(file.first, ioify(file.second)))
end
process_params(x::AbstractString) = x
process_params(x) = JSON3.write(x)
function query(client::TelegramClient, method; params = Dict())
req_uri = client.ep * token(client) * "/" * method
intersection = intersect(keys(params), DEFAULT_OPTS.upload_kw)
if isempty(intersection)
headers = ["Content-Type" => "application/json", "Connection" => "Keep-Alive"]
json_params = JSON3.write(params)
res = HTTP.post(req_uri, headers, json_params; readtimeout = DEFAULT_OPTS.timeout + 1)
else
body = Pair[]
for (k, v) in params
k in intersection && continue
push!(body, k => process_params(v))
end
for k in intersection
pushfiles!(body, k, params[k])
end
res = HTTP.post(req_uri, ["Connection" => "Keep-Alive"], HTTP.Form(body); readtimeout = DEFAULT_OPTS.timeout + 1)
end
response = JSON3.read(res.body)
if response.ok
return response.result
else
throw(TelegramError(response))
end
end
"""
apiquery(method, client; kwargs...)
Sends `method` request to the telegram. It is recommended to use only if some of Telegram API function is not wrapped already.
# Arguments
- `method::String`: method name from the Telegram API, for example "getMe"
- `client::TelegramClient`: telegram client, can be omitted, in this case default client is used.
"""
function apiquery(method, client::TelegramClient = DEFAULT_OPTS.client; kwargs...)
params = Dict{Symbol, Any}(kwargs)
params[:chat_id] = get(params, :chat_id, chatid(client))
params[:parse_mode] = get(params, :parse_mode, client.parse_mode)
query(client, method, params = params)
end
| Telegram | https://github.com/Arkoniak/Telegram.jl.git |
|
[
"MIT"
]
| 1.1.5 | 4ac524cb90051721afa82c8a6c999df35dafbecd | code | 2531 | struct TelegramLogger <: AbstractLogger
tg::TelegramClient
fmt::Function
min_level::LogLevel
async::Bool
silent_errors::Bool
end
"""
TelegramLogger(tg::TelegramClient; fmt = tg_formatter,
min_level = Logging.Info, async = true)
Creates logger, which output log messages to Telegram channel.
# Arguments
- `tg`: telegram client, should have valid `chat_id` which will be used for outcome messages.
- `fmt`: function which accepts (`level`, `_module`, `group`, `id`, `file`, `line`) arguments and outputs message prefix. More details can be found in [Logging](https://docs.julialang.org/en/v1/stdlib/Logging/#Logging.handle_message) module. By default each messages is prepended with uppercase level, e.g. "INFO: " and the like.
- `min_level`: minimum level of log messages which is going to be processed.
- `async`: send messages in `sync` or `async` mode. Since telegram messages can take some time to be send, it make sense to set this parameter to `true`, so messages is send in the background with little impact on main program. But since in one run scripts main julia process can be finished before async message is sent, it make sense to set this parameter to `false`
- `silent_errors`: by default, if there was an error during sending a message, it will be printed in `stderr` channel. If you want to silence this output, set `silent_errors` to `true`.
"""
function TelegramLogger(tg::TelegramClient; fmt = tg_formatter, min_level = Info, async = true, silent_errors = false)
return TelegramLogger(tg, fmt, min_level, async, silent_errors)
end
function tg_formatter(level, _module, group, id, file, line)
return uppercase(string(level)) * ": "
end
function handle_message(tglogger::TelegramLogger, level, message, _module, group, id,
filepath, line; kwargs...)
iob = IOBuffer()
prefix = tg_formatter(level, _module, group, id, filepath, line)
print(iob, prefix, string(message))
for (key, val) in kwargs
print(iob, key, " = ", val)
end
text = String(take!(iob))
if tglogger.async
@async try
sendMessage(tglogger.tg; text = text)
catch err
tglogger.silent_errors || error(err)
end
else
try
sendMessage(tglogger.tg; text = text)
catch err
tglogger.silent_errors || error(err)
end
end
end
shouldlog(tglogger::TelegramLogger, arg...) = true
min_enabled_level(tglogger::TelegramLogger) = tglogger.min_level
| Telegram | https://github.com/Arkoniak/Telegram.jl.git |
|
[
"MIT"
]
| 1.1.5 | 4ac524cb90051721afa82c8a6c999df35dafbecd | code | 125223 | const TELEGRAM_API = [
(:getUpdates, """
getUpdates([tg::TelegramClient]; kwargs...)
Use this method to receive incoming updates using long polling (wiki). Returns an Array of [Update](https://core.telegram.org/bots/api#update) objects.
# Optional arguments
- `offset`: (Integer) Identifier of the first update to be returned. Must be greater by one than the highest among the identifiers of previously received updates. By default, updates starting with the earliest unconfirmed update are returned. An update is considered confirmed as soon as [`getUpdates`](@ref) is called with an offset higher than its update_id. The negative offset can be specified to retrieve updates starting from -offset update from the end of the updates queue. All previous updates will be forgotten.
- `limit`: (Integer) Limits the number of updates to be retrieved. Values between 1-100 are accepted. Defaults to 100.
- `timeout`: (Integer) Timeout in seconds for long polling. Defaults to 0, i.e. usual short polling. Should be positive, short polling should be used for testing purposes only.
- `allowed_updates`: (Array of String) A JSON-serialized list of the update types you want your bot to receive. For example, specify [“message”, “edited_channel_post”, “callback_query”] to only receive updates of these types. See [Update](https://core.telegram.org/bots/api#update) for a complete list of available update types. Specify an empty list to receive all update types except chat_member (default). If not specified, the previous setting will be used.Please note that this parameter doesn't affect updates created before the call to the getUpdates, so unwanted updates may be received for a short period of time.
Notes1. This method will not work if an outgoing webhook is set up.2. In order to avoid getting duplicate updates, recalculate offset after each server response.
[Function documentation source](https://core.telegram.org/bots/api#getupdates)
"""),
(:setWebhook, """
setWebhook([tg::TelegramClient]; kwargs...)
Use this method to specify a URL and receive incoming updates via an outgoing webhook. Whenever there is an update for the bot, we will send an HTTPS POST request to the specified URL, containing a JSON-serialized [Update](https://core.telegram.org/bots/api#update). In case of an unsuccessful request, we will give up after a reasonable amount of attempts. Returns True on success.
If you'd like to make sure that the webhook was set by you, you can specify secret data in the parameter secret_token. If specified, the request will contain a header “X-Telegram-Bot-Api-Secret-Token” with the secret token as content.
# Required arguments
- `url`: (String) HTTPS URL to send updates to. Use an empty string to remove webhook integration
# Optional arguments
- `certificate`: (InputFile) Upload your public key certificate so that the root certificate in use can be checked. See our self-signed guide for details.
- `ip_address`: (String) The fixed IP address which will be used to send webhook requests instead of the IP address resolved through DNS
- `max_connections`: (Integer) The maximum allowed number of simultaneous HTTPS connections to the webhook for update delivery, 1-100. Defaults to 40. Use lower values to limit the load on your bot's server, and higher values to increase your bot's throughput.
- `allowed_updates`: (Array of String) A JSON-serialized list of the update types you want your bot to receive. For example, specify [“message”, “edited_channel_post”, “callback_query”] to only receive updates of these types. See [Update](https://core.telegram.org/bots/api#update) for a complete list of available update types. Specify an empty list to receive all update types except chat_member (default). If not specified, the previous setting will be used.Please note that this parameter doesn't affect updates created before the call to the setWebhook, so unwanted updates may be received for a short period of time.
- `drop_pending_updates`: (Boolean) Pass True to drop all pending updates
- `secret_token`: (String) A secret token to be sent in a header “X-Telegram-Bot-Api-Secret-Token” in every webhook request, 1-256 characters. Only characters `A-Z`, `a-z`, `0-9`, `_` and `-` are allowed. The header is useful to ensure that the request comes from a webhook set by you.
Notes1. You will not be able to receive updates using [`getUpdates`](@ref) for as long as an outgoing webhook is set up.2. To use a self-signed certificate, you need to upload your public key certificate using certificate parameter. Please upload as InputFile, sending a String will not work.3. Ports currently supported for webhooks: 443, 80, 88, 8443.
If you're having any trouble setting up webhooks, please check out this amazing guide to webhooks.
[Function documentation source](https://core.telegram.org/bots/api#setwebhook)
"""),
(:deleteWebhook, """
deleteWebhook([tg::TelegramClient]; kwargs...)
Use this method to remove webhook integration if you decide to switch back to [`getUpdates`](@ref). Returns True on success.
# Optional arguments
- `drop_pending_updates`: (Boolean) Pass True to drop all pending updates
[Function documentation source](https://core.telegram.org/bots/api#deletewebhook)
"""),
(:getWebhookInfo, """
getWebhookInfo([tg::TelegramClient]; kwargs...)
Use this method to get current webhook status. Requires no parameters. On success, returns a [WebhookInfo](https://core.telegram.org/bots/api#webhookinfo) object. If the bot is using [`getUpdates`](@ref), will return an object with the url field empty.
[Function documentation source](https://core.telegram.org/bots/api#getwebhookinfo)
"""),
(:getMe, """
getMe([tg::TelegramClient]; kwargs...)
A simple method for testing your bot's authentication token. Requires no parameters. Returns basic information about the bot in form of a [User](https://core.telegram.org/bots/api#user) object.
[Function documentation source](https://core.telegram.org/bots/api#getme)
"""),
(:logOut, """
logOut([tg::TelegramClient]; kwargs...)
Use this method to log out from the cloud Bot API server before launching the bot locally. You must log out the bot before running it locally, otherwise there is no guarantee that the bot will receive updates. After a successful call, you can immediately log in on a local server, but will not be able to log in back to the cloud Bot API server for 10 minutes. Returns True on success. Requires no parameters.
[Function documentation source](https://core.telegram.org/bots/api#logout)
"""),
(:close, """
close([tg::TelegramClient]; kwargs...)
Use this method to close the bot instance before moving it from one local server to another. You need to delete the webhook before calling this method to ensure that the bot isn't launched again after server restart. The method will return error 429 in the first 10 minutes after the bot is launched. Returns True on success. Requires no parameters.
[Function documentation source](https://core.telegram.org/bots/api#close)
"""),
(:sendMessage, """
sendMessage([tg::TelegramClient]; kwargs...)
Use this method to send text messages. On success, the sent [Message](https://core.telegram.org/bots/api#message) is returned.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target channel (in the format `@channelusername`)
- `text`: (String) Text of the message to be sent, 1-4096 characters after entities parsing
# Optional arguments
- `message_thread_id`: (Integer) Unique identifier for the target message thread (topic) of the forum; for forum supergroups only
- `parse_mode`: (String) Mode for parsing entities in the message text. See [formatting options](https://core.telegram.org/bots/api#formatting-options) for more details.
- `entities`: (Array of MessageEntity) A JSON-serialized list of special entities that appear in message text, which can be specified instead of parse_mode
- `disable_web_page_preview`: (Boolean) Disables link previews for links in this message
- `disable_notification`: (Boolean) Sends the message silently. Users will receive a notification with no sound.
- `protect_content`: (Boolean) Protects the contents of the sent message from forwarding and saving
- `reply_to_message_id`: (Integer) If the message is a reply, ID of the original message
- `allow_sending_without_reply`: (Boolean) Pass True if the message should be sent even if the specified replied-to message is not found
- `reply_markup`: (InlineKeyboardMarkup or ReplyKeyboardMarkup or ReplyKeyboardRemove or ForceReply) Additional interface options. A JSON-serialized object for an inline keyboard, custom reply keyboard, instructions to remove reply keyboard or to force a reply from the user.
[Function documentation source](https://core.telegram.org/bots/api#sendmessage)
"""),
(:forwardMessage, """
forwardMessage([tg::TelegramClient]; kwargs...)
Use this method to forward messages of any kind. Service messages can't be forwarded. On success, the sent [Message](https://core.telegram.org/bots/api#message) is returned.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target channel (in the format `@channelusername`)
- `from_chat_id`: (Integer or String) Unique identifier for the chat where the original message was sent (or channel username in the format `@channelusername`)
- `message_id`: (Integer) Message identifier in the chat specified in from_chat_id
# Optional arguments
- `message_thread_id`: (Integer) Unique identifier for the target message thread (topic) of the forum; for forum supergroups only
- `disable_notification`: (Boolean) Sends the message silently. Users will receive a notification with no sound.
- `protect_content`: (Boolean) Protects the contents of the forwarded message from forwarding and saving
[Function documentation source](https://core.telegram.org/bots/api#forwardmessage)
"""),
(:copyMessage, """
copyMessage([tg::TelegramClient]; kwargs...)
Use this method to copy messages of any kind. Service messages and invoice messages can't be copied. A quiz [poll](https://core.telegram.org/bots/api#poll) can be copied only if the value of the field correct_option_id is known to the bot. The method is analogous to the method [`forwardMessage`](@ref), but the copied message doesn't have a link to the original message. Returns the [MessageId](https://core.telegram.org/bots/api#messageid) of the sent message on success.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target channel (in the format `@channelusername`)
- `from_chat_id`: (Integer or String) Unique identifier for the chat where the original message was sent (or channel username in the format `@channelusername`)
- `message_id`: (Integer) Message identifier in the chat specified in from_chat_id
# Optional arguments
- `message_thread_id`: (Integer) Unique identifier for the target message thread (topic) of the forum; for forum supergroups only
- `caption`: (String) New caption for media, 0-1024 characters after entities parsing. If not specified, the original caption is kept
- `parse_mode`: (String) Mode for parsing entities in the new caption. See [formatting options](https://core.telegram.org/bots/api#formatting-options) for more details.
- `caption_entities`: (Array of MessageEntity) A JSON-serialized list of special entities that appear in the new caption, which can be specified instead of parse_mode
- `disable_notification`: (Boolean) Sends the message silently. Users will receive a notification with no sound.
- `protect_content`: (Boolean) Protects the contents of the sent message from forwarding and saving
- `reply_to_message_id`: (Integer) If the message is a reply, ID of the original message
- `allow_sending_without_reply`: (Boolean) Pass True if the message should be sent even if the specified replied-to message is not found
- `reply_markup`: (InlineKeyboardMarkup or ReplyKeyboardMarkup or ReplyKeyboardRemove or ForceReply) Additional interface options. A JSON-serialized object for an inline keyboard, custom reply keyboard, instructions to remove reply keyboard or to force a reply from the user.
[Function documentation source](https://core.telegram.org/bots/api#copymessage)
"""),
(:sendPhoto, """
sendPhoto([tg::TelegramClient]; kwargs...)
Use this method to send photos. On success, the sent [Message](https://core.telegram.org/bots/api#message) is returned.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target channel (in the format `@channelusername`)
- `photo`: (InputFile or String) Photo to send. Pass a file_id as String to send a photo that exists on the Telegram servers (recommended), pass an HTTP URL as a String for Telegram to get a photo from the Internet, or upload a new photo using multipart/form-data. The photo must be at most 10 MB in size. The photo's width and height must not exceed 10000 in total. Width and height ratio must be at most 20. [More information on Sending Files »](https://core.telegram.org/bots/api#sending-files)
# Optional arguments
- `message_thread_id`: (Integer) Unique identifier for the target message thread (topic) of the forum; for forum supergroups only
- `caption`: (String) Photo caption (may also be used when resending photos by file_id), 0-1024 characters after entities parsing
- `parse_mode`: (String) Mode for parsing entities in the photo caption. See [formatting options](https://core.telegram.org/bots/api#formatting-options) for more details.
- `caption_entities`: (Array of MessageEntity) A JSON-serialized list of special entities that appear in the caption, which can be specified instead of parse_mode
- `has_spoiler`: (Boolean) Pass True if the photo needs to be covered with a spoiler animation
- `disable_notification`: (Boolean) Sends the message silently. Users will receive a notification with no sound.
- `protect_content`: (Boolean) Protects the contents of the sent message from forwarding and saving
- `reply_to_message_id`: (Integer) If the message is a reply, ID of the original message
- `allow_sending_without_reply`: (Boolean) Pass True if the message should be sent even if the specified replied-to message is not found
- `reply_markup`: (InlineKeyboardMarkup or ReplyKeyboardMarkup or ReplyKeyboardRemove or ForceReply) Additional interface options. A JSON-serialized object for an inline keyboard, custom reply keyboard, instructions to remove reply keyboard or to force a reply from the user.
[Function documentation source](https://core.telegram.org/bots/api#sendphoto)
"""),
(:sendAudio, """
sendAudio([tg::TelegramClient]; kwargs...)
Use this method to send audio files, if you want Telegram clients to display them in the music player. Your audio must be in the .MP3 or .M4A format. On success, the sent [Message](https://core.telegram.org/bots/api#message) is returned. Bots can currently send audio files of up to 50 MB in size, this limit may be changed in the future.
For sending voice messages, use the [`sendVoice`](@ref) method instead.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target channel (in the format `@channelusername`)
- `audio`: (InputFile or String) Audio file to send. Pass a file_id as String to send an audio file that exists on the Telegram servers (recommended), pass an HTTP URL as a String for Telegram to get an audio file from the Internet, or upload a new one using multipart/form-data. [More information on Sending Files »](https://core.telegram.org/bots/api#sending-files)
# Optional arguments
- `message_thread_id`: (Integer) Unique identifier for the target message thread (topic) of the forum; for forum supergroups only
- `caption`: (String) Audio caption, 0-1024 characters after entities parsing
- `parse_mode`: (String) Mode for parsing entities in the audio caption. See [formatting options](https://core.telegram.org/bots/api#formatting-options) for more details.
- `caption_entities`: (Array of MessageEntity) A JSON-serialized list of special entities that appear in the caption, which can be specified instead of parse_mode
- `duration`: (Integer) Duration of the audio in seconds
- `performer`: (String) Performer
- `title`: (String) Track name
- `thumbnail`: (InputFile or String) Thumbnail of the file sent; can be ignored if thumbnail generation for the file is supported server-side. The thumbnail should be in JPEG format and less than 200 kB in size. A thumbnail's width and height should not exceed 320. Ignored if the file is not uploaded using multipart/form-data. Thumbnails can't be reused and can be only uploaded as a new file, so you can pass “attach://<file_attach_name>” if the thumbnail was uploaded using multipart/form-data under <file_attach_name>. [More information on Sending Files »](https://core.telegram.org/bots/api#sending-files)
- `disable_notification`: (Boolean) Sends the message silently. Users will receive a notification with no sound.
- `protect_content`: (Boolean) Protects the contents of the sent message from forwarding and saving
- `reply_to_message_id`: (Integer) If the message is a reply, ID of the original message
- `allow_sending_without_reply`: (Boolean) Pass True if the message should be sent even if the specified replied-to message is not found
- `reply_markup`: (InlineKeyboardMarkup or ReplyKeyboardMarkup or ReplyKeyboardRemove or ForceReply) Additional interface options. A JSON-serialized object for an inline keyboard, custom reply keyboard, instructions to remove reply keyboard or to force a reply from the user.
[Function documentation source](https://core.telegram.org/bots/api#sendaudio)
"""),
(:sendDocument, """
sendDocument([tg::TelegramClient]; kwargs...)
Use this method to send general files. On success, the sent [Message](https://core.telegram.org/bots/api#message) is returned. Bots can currently send files of any type of up to 50 MB in size, this limit may be changed in the future.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target channel (in the format `@channelusername`)
- `document`: (InputFile or String) File to send. Pass a file_id as String to send a file that exists on the Telegram servers (recommended), pass an HTTP URL as a String for Telegram to get a file from the Internet, or upload a new one using multipart/form-data. [More information on Sending Files »](https://core.telegram.org/bots/api#sending-files)
# Optional arguments
- `message_thread_id`: (Integer) Unique identifier for the target message thread (topic) of the forum; for forum supergroups only
- `thumbnail`: (InputFile or String) Thumbnail of the file sent; can be ignored if thumbnail generation for the file is supported server-side. The thumbnail should be in JPEG format and less than 200 kB in size. A thumbnail's width and height should not exceed 320. Ignored if the file is not uploaded using multipart/form-data. Thumbnails can't be reused and can be only uploaded as a new file, so you can pass “attach://<file_attach_name>” if the thumbnail was uploaded using multipart/form-data under <file_attach_name>. [More information on Sending Files »](https://core.telegram.org/bots/api#sending-files)
- `caption`: (String) Document caption (may also be used when resending documents by file_id), 0-1024 characters after entities parsing
- `parse_mode`: (String) Mode for parsing entities in the document caption. See [formatting options](https://core.telegram.org/bots/api#formatting-options) for more details.
- `caption_entities`: (Array of MessageEntity) A JSON-serialized list of special entities that appear in the caption, which can be specified instead of parse_mode
- `disable_content_type_detection`: (Boolean) Disables automatic server-side content type detection for files uploaded using multipart/form-data
- `disable_notification`: (Boolean) Sends the message silently. Users will receive a notification with no sound.
- `protect_content`: (Boolean) Protects the contents of the sent message from forwarding and saving
- `reply_to_message_id`: (Integer) If the message is a reply, ID of the original message
- `allow_sending_without_reply`: (Boolean) Pass True if the message should be sent even if the specified replied-to message is not found
- `reply_markup`: (InlineKeyboardMarkup or ReplyKeyboardMarkup or ReplyKeyboardRemove or ForceReply) Additional interface options. A JSON-serialized object for an inline keyboard, custom reply keyboard, instructions to remove reply keyboard or to force a reply from the user.
[Function documentation source](https://core.telegram.org/bots/api#senddocument)
"""),
(:sendVideo, """
sendVideo([tg::TelegramClient]; kwargs...)
Use this method to send video files, Telegram clients support MPEG4 videos (other formats may be sent as [Document](https://core.telegram.org/bots/api#document)). On success, the sent [Message](https://core.telegram.org/bots/api#message) is returned. Bots can currently send video files of up to 50 MB in size, this limit may be changed in the future.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target channel (in the format `@channelusername`)
- `video`: (InputFile or String) Video to send. Pass a file_id as String to send a video that exists on the Telegram servers (recommended), pass an HTTP URL as a String for Telegram to get a video from the Internet, or upload a new video using multipart/form-data. [More information on Sending Files »](https://core.telegram.org/bots/api#sending-files)
# Optional arguments
- `message_thread_id`: (Integer) Unique identifier for the target message thread (topic) of the forum; for forum supergroups only
- `duration`: (Integer) Duration of sent video in seconds
- `width`: (Integer) Video width
- `height`: (Integer) Video height
- `thumbnail`: (InputFile or String) Thumbnail of the file sent; can be ignored if thumbnail generation for the file is supported server-side. The thumbnail should be in JPEG format and less than 200 kB in size. A thumbnail's width and height should not exceed 320. Ignored if the file is not uploaded using multipart/form-data. Thumbnails can't be reused and can be only uploaded as a new file, so you can pass “attach://<file_attach_name>” if the thumbnail was uploaded using multipart/form-data under <file_attach_name>. [More information on Sending Files »](https://core.telegram.org/bots/api#sending-files)
- `caption`: (String) Video caption (may also be used when resending videos by file_id), 0-1024 characters after entities parsing
- `parse_mode`: (String) Mode for parsing entities in the video caption. See [formatting options](https://core.telegram.org/bots/api#formatting-options) for more details.
- `caption_entities`: (Array of MessageEntity) A JSON-serialized list of special entities that appear in the caption, which can be specified instead of parse_mode
- `has_spoiler`: (Boolean) Pass True if the video needs to be covered with a spoiler animation
- `supports_streaming`: (Boolean) Pass True if the uploaded video is suitable for streaming
- `disable_notification`: (Boolean) Sends the message silently. Users will receive a notification with no sound.
- `protect_content`: (Boolean) Protects the contents of the sent message from forwarding and saving
- `reply_to_message_id`: (Integer) If the message is a reply, ID of the original message
- `allow_sending_without_reply`: (Boolean) Pass True if the message should be sent even if the specified replied-to message is not found
- `reply_markup`: (InlineKeyboardMarkup or ReplyKeyboardMarkup or ReplyKeyboardRemove or ForceReply) Additional interface options. A JSON-serialized object for an inline keyboard, custom reply keyboard, instructions to remove reply keyboard or to force a reply from the user.
[Function documentation source](https://core.telegram.org/bots/api#sendvideo)
"""),
(:sendAnimation, """
sendAnimation([tg::TelegramClient]; kwargs...)
Use this method to send animation files (GIF or H.264/MPEG-4 AVC video without sound). On success, the sent [Message](https://core.telegram.org/bots/api#message) is returned. Bots can currently send animation files of up to 50 MB in size, this limit may be changed in the future.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target channel (in the format `@channelusername`)
- `animation`: (InputFile or String) Animation to send. Pass a file_id as String to send an animation that exists on the Telegram servers (recommended), pass an HTTP URL as a String for Telegram to get an animation from the Internet, or upload a new animation using multipart/form-data. [More information on Sending Files »](https://core.telegram.org/bots/api#sending-files)
# Optional arguments
- `message_thread_id`: (Integer) Unique identifier for the target message thread (topic) of the forum; for forum supergroups only
- `duration`: (Integer) Duration of sent animation in seconds
- `width`: (Integer) Animation width
- `height`: (Integer) Animation height
- `thumbnail`: (InputFile or String) Thumbnail of the file sent; can be ignored if thumbnail generation for the file is supported server-side. The thumbnail should be in JPEG format and less than 200 kB in size. A thumbnail's width and height should not exceed 320. Ignored if the file is not uploaded using multipart/form-data. Thumbnails can't be reused and can be only uploaded as a new file, so you can pass “attach://<file_attach_name>” if the thumbnail was uploaded using multipart/form-data under <file_attach_name>. [More information on Sending Files »](https://core.telegram.org/bots/api#sending-files)
- `caption`: (String) Animation caption (may also be used when resending animation by file_id), 0-1024 characters after entities parsing
- `parse_mode`: (String) Mode for parsing entities in the animation caption. See [formatting options](https://core.telegram.org/bots/api#formatting-options) for more details.
- `caption_entities`: (Array of MessageEntity) A JSON-serialized list of special entities that appear in the caption, which can be specified instead of parse_mode
- `has_spoiler`: (Boolean) Pass True if the animation needs to be covered with a spoiler animation
- `disable_notification`: (Boolean) Sends the message silently. Users will receive a notification with no sound.
- `protect_content`: (Boolean) Protects the contents of the sent message from forwarding and saving
- `reply_to_message_id`: (Integer) If the message is a reply, ID of the original message
- `allow_sending_without_reply`: (Boolean) Pass True if the message should be sent even if the specified replied-to message is not found
- `reply_markup`: (InlineKeyboardMarkup or ReplyKeyboardMarkup or ReplyKeyboardRemove or ForceReply) Additional interface options. A JSON-serialized object for an inline keyboard, custom reply keyboard, instructions to remove reply keyboard or to force a reply from the user.
[Function documentation source](https://core.telegram.org/bots/api#sendanimation)
"""),
(:sendVoice, """
sendVoice([tg::TelegramClient]; kwargs...)
Use this method to send audio files, if you want Telegram clients to display the file as a playable voice message. For this to work, your audio must be in an .OGG file encoded with OPUS (other formats may be sent as [Audio](https://core.telegram.org/bots/api#audio) or [Document](https://core.telegram.org/bots/api#document)). On success, the sent [Message](https://core.telegram.org/bots/api#message) is returned. Bots can currently send voice messages of up to 50 MB in size, this limit may be changed in the future.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target channel (in the format `@channelusername`)
- `voice`: (InputFile or String) Audio file to send. Pass a file_id as String to send a file that exists on the Telegram servers (recommended), pass an HTTP URL as a String for Telegram to get a file from the Internet, or upload a new one using multipart/form-data. [More information on Sending Files »](https://core.telegram.org/bots/api#sending-files)
# Optional arguments
- `message_thread_id`: (Integer) Unique identifier for the target message thread (topic) of the forum; for forum supergroups only
- `caption`: (String) Voice message caption, 0-1024 characters after entities parsing
- `parse_mode`: (String) Mode for parsing entities in the voice message caption. See [formatting options](https://core.telegram.org/bots/api#formatting-options) for more details.
- `caption_entities`: (Array of MessageEntity) A JSON-serialized list of special entities that appear in the caption, which can be specified instead of parse_mode
- `duration`: (Integer) Duration of the voice message in seconds
- `disable_notification`: (Boolean) Sends the message silently. Users will receive a notification with no sound.
- `protect_content`: (Boolean) Protects the contents of the sent message from forwarding and saving
- `reply_to_message_id`: (Integer) If the message is a reply, ID of the original message
- `allow_sending_without_reply`: (Boolean) Pass True if the message should be sent even if the specified replied-to message is not found
- `reply_markup`: (InlineKeyboardMarkup or ReplyKeyboardMarkup or ReplyKeyboardRemove or ForceReply) Additional interface options. A JSON-serialized object for an inline keyboard, custom reply keyboard, instructions to remove reply keyboard or to force a reply from the user.
[Function documentation source](https://core.telegram.org/bots/api#sendvoice)
"""),
(:sendVideoNote, """
sendVideoNote([tg::TelegramClient]; kwargs...)
As of v.4.0, Telegram clients support rounded square MPEG4 videos of up to 1 minute long. Use this method to send video messages. On success, the sent [Message](https://core.telegram.org/bots/api#message) is returned.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target channel (in the format `@channelusername`)
- `video_note`: (InputFile or String) Video note to send. Pass a file_id as String to send a video note that exists on the Telegram servers (recommended) or upload a new video using multipart/form-data. [More information on Sending Files »](https://core.telegram.org/bots/api#sending-files). Sending video notes by a URL is currently unsupported
# Optional arguments
- `message_thread_id`: (Integer) Unique identifier for the target message thread (topic) of the forum; for forum supergroups only
- `duration`: (Integer) Duration of sent video in seconds
- `length`: (Integer) Video width and height, i.e. diameter of the video message
- `thumbnail`: (InputFile or String) Thumbnail of the file sent; can be ignored if thumbnail generation for the file is supported server-side. The thumbnail should be in JPEG format and less than 200 kB in size. A thumbnail's width and height should not exceed 320. Ignored if the file is not uploaded using multipart/form-data. Thumbnails can't be reused and can be only uploaded as a new file, so you can pass “attach://<file_attach_name>” if the thumbnail was uploaded using multipart/form-data under <file_attach_name>. [More information on Sending Files »](https://core.telegram.org/bots/api#sending-files)
- `disable_notification`: (Boolean) Sends the message silently. Users will receive a notification with no sound.
- `protect_content`: (Boolean) Protects the contents of the sent message from forwarding and saving
- `reply_to_message_id`: (Integer) If the message is a reply, ID of the original message
- `allow_sending_without_reply`: (Boolean) Pass True if the message should be sent even if the specified replied-to message is not found
- `reply_markup`: (InlineKeyboardMarkup or ReplyKeyboardMarkup or ReplyKeyboardRemove or ForceReply) Additional interface options. A JSON-serialized object for an inline keyboard, custom reply keyboard, instructions to remove reply keyboard or to force a reply from the user.
[Function documentation source](https://core.telegram.org/bots/api#sendvideonote)
"""),
(:sendMediaGroup, """
sendMediaGroup([tg::TelegramClient]; kwargs...)
Use this method to send a group of photos, videos, documents or audios as an album. Documents and audio files can be only grouped in an album with messages of the same type. On success, an array of [Messages](https://core.telegram.org/bots/api#message) that were sent is returned.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target channel (in the format `@channelusername`)
- `media`: (Array of InputMediaAudio, InputMediaDocument, InputMediaPhoto and InputMediaVideo) A JSON-serialized array describing messages to be sent, must include 2-10 items
# Optional arguments
- `message_thread_id`: (Integer) Unique identifier for the target message thread (topic) of the forum; for forum supergroups only
- `disable_notification`: (Boolean) Sends messages silently. Users will receive a notification with no sound.
- `protect_content`: (Boolean) Protects the contents of the sent messages from forwarding and saving
- `reply_to_message_id`: (Integer) If the messages are a reply, ID of the original message
- `allow_sending_without_reply`: (Boolean) Pass True if the message should be sent even if the specified replied-to message is not found
[Function documentation source](https://core.telegram.org/bots/api#sendmediagroup)
"""),
(:sendLocation, """
sendLocation([tg::TelegramClient]; kwargs...)
Use this method to send point on the map. On success, the sent [Message](https://core.telegram.org/bots/api#message) is returned.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target channel (in the format `@channelusername`)
- `latitude`: (Float number) Latitude of the location
- `longitude`: (Float number) Longitude of the location
# Optional arguments
- `message_thread_id`: (Integer) Unique identifier for the target message thread (topic) of the forum; for forum supergroups only
- `horizontal_accuracy`: (Float number) The radius of uncertainty for the location, measured in meters; 0-1500
- `live_period`: (Integer) Period in seconds for which the location will be updated (see Live Locations, should be between 60 and 86400.
- `heading`: (Integer) For live locations, a direction in which the user is moving, in degrees. Must be between 1 and 360 if specified.
- `proximity_alert_radius`: (Integer) For live locations, a maximum distance for proximity alerts about approaching another chat member, in meters. Must be between 1 and 100000 if specified.
- `disable_notification`: (Boolean) Sends the message silently. Users will receive a notification with no sound.
- `protect_content`: (Boolean) Protects the contents of the sent message from forwarding and saving
- `reply_to_message_id`: (Integer) If the message is a reply, ID of the original message
- `allow_sending_without_reply`: (Boolean) Pass True if the message should be sent even if the specified replied-to message is not found
- `reply_markup`: (InlineKeyboardMarkup or ReplyKeyboardMarkup or ReplyKeyboardRemove or ForceReply) Additional interface options. A JSON-serialized object for an inline keyboard, custom reply keyboard, instructions to remove reply keyboard or to force a reply from the user.
[Function documentation source](https://core.telegram.org/bots/api#sendlocation)
"""),
(:sendVenue, """
sendVenue([tg::TelegramClient]; kwargs...)
Use this method to send information about a venue. On success, the sent [Message](https://core.telegram.org/bots/api#message) is returned.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target channel (in the format `@channelusername`)
- `latitude`: (Float number) Latitude of the venue
- `longitude`: (Float number) Longitude of the venue
- `title`: (String) Name of the venue
- `address`: (String) Address of the venue
# Optional arguments
- `message_thread_id`: (Integer) Unique identifier for the target message thread (topic) of the forum; for forum supergroups only
- `foursquare_id`: (String) Foursquare identifier of the venue
- `foursquare_type`: (String) Foursquare type of the venue, if known. (For example, “arts_entertainment/default”, “arts_entertainment/aquarium” or “food/icecream”.)
- `google_place_id`: (String) Google Places identifier of the venue
- `google_place_type`: (String) Google Places type of the venue. (See supported types.)
- `disable_notification`: (Boolean) Sends the message silently. Users will receive a notification with no sound.
- `protect_content`: (Boolean) Protects the contents of the sent message from forwarding and saving
- `reply_to_message_id`: (Integer) If the message is a reply, ID of the original message
- `allow_sending_without_reply`: (Boolean) Pass True if the message should be sent even if the specified replied-to message is not found
- `reply_markup`: (InlineKeyboardMarkup or ReplyKeyboardMarkup or ReplyKeyboardRemove or ForceReply) Additional interface options. A JSON-serialized object for an inline keyboard, custom reply keyboard, instructions to remove reply keyboard or to force a reply from the user.
[Function documentation source](https://core.telegram.org/bots/api#sendvenue)
"""),
(:sendContact, """
sendContact([tg::TelegramClient]; kwargs...)
Use this method to send phone contacts. On success, the sent [Message](https://core.telegram.org/bots/api#message) is returned.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target channel (in the format `@channelusername`)
- `phone_number`: (String) Contact's phone number
- `first_name`: (String) Contact's first name
# Optional arguments
- `message_thread_id`: (Integer) Unique identifier for the target message thread (topic) of the forum; for forum supergroups only
- `last_name`: (String) Contact's last name
- `vcard`: (String) Additional data about the contact in the form of a vCard, 0-2048 bytes
- `disable_notification`: (Boolean) Sends the message silently. Users will receive a notification with no sound.
- `protect_content`: (Boolean) Protects the contents of the sent message from forwarding and saving
- `reply_to_message_id`: (Integer) If the message is a reply, ID of the original message
- `allow_sending_without_reply`: (Boolean) Pass True if the message should be sent even if the specified replied-to message is not found
- `reply_markup`: (InlineKeyboardMarkup or ReplyKeyboardMarkup or ReplyKeyboardRemove or ForceReply) Additional interface options. A JSON-serialized object for an inline keyboard, custom reply keyboard, instructions to remove reply keyboard or to force a reply from the user.
[Function documentation source](https://core.telegram.org/bots/api#sendcontact)
"""),
(:sendPoll, """
sendPoll([tg::TelegramClient]; kwargs...)
Use this method to send a native poll. On success, the sent [Message](https://core.telegram.org/bots/api#message) is returned.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target channel (in the format `@channelusername`)
- `question`: (String) Poll question, 1-300 characters
- `options`: (Array of String) A JSON-serialized list of answer options, 2-10 strings 1-100 characters each
# Optional arguments
- `message_thread_id`: (Integer) Unique identifier for the target message thread (topic) of the forum; for forum supergroups only
- `is_anonymous`: (Boolean) True, if the poll needs to be anonymous, defaults to True
- `type`: (String) Poll type, “quiz” or “regular”, defaults to “regular”
- `allows_multiple_answers`: (Boolean) True, if the poll allows multiple answers, ignored for polls in quiz mode, defaults to False
- `correct_option_id`: (Integer) 0-based identifier of the correct answer option, required for polls in quiz mode
- `explanation`: (String) Text that is shown when a user chooses an incorrect answer or taps on the lamp icon in a quiz-style poll, 0-200 characters with at most 2 line feeds after entities parsing
- `explanation_parse_mode`: (String) Mode for parsing entities in the explanation. See [formatting options](https://core.telegram.org/bots/api#formatting-options) for more details.
- `explanation_entities`: (Array of MessageEntity) A JSON-serialized list of special entities that appear in the poll explanation, which can be specified instead of parse_mode
- `open_period`: (Integer) Amount of time in seconds the poll will be active after creation, 5-600. Can't be used together with close_date.
- `close_date`: (Integer) Point in time (Unix timestamp) when the poll will be automatically closed. Must be at least 5 and no more than 600 seconds in the future. Can't be used together with open_period.
- `is_closed`: (Boolean) Pass True if the poll needs to be immediately closed. This can be useful for poll preview.
- `disable_notification`: (Boolean) Sends the message silently. Users will receive a notification with no sound.
- `protect_content`: (Boolean) Protects the contents of the sent message from forwarding and saving
- `reply_to_message_id`: (Integer) If the message is a reply, ID of the original message
- `allow_sending_without_reply`: (Boolean) Pass True if the message should be sent even if the specified replied-to message is not found
- `reply_markup`: (InlineKeyboardMarkup or ReplyKeyboardMarkup or ReplyKeyboardRemove or ForceReply) Additional interface options. A JSON-serialized object for an inline keyboard, custom reply keyboard, instructions to remove reply keyboard or to force a reply from the user.
[Function documentation source](https://core.telegram.org/bots/api#sendpoll)
"""),
(:sendDice, """
sendDice([tg::TelegramClient]; kwargs...)
Use this method to send an animated emoji that will display a random value. On success, the sent [Message](https://core.telegram.org/bots/api#message) is returned.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target channel (in the format `@channelusername`)
# Optional arguments
- `message_thread_id`: (Integer) Unique identifier for the target message thread (topic) of the forum; for forum supergroups only
- `emoji`: (String) Emoji on which the dice throw animation is based. Currently, must be one of “”, “”, “”, “”, “”, or “”. Dice can have values 1-6 for “”, “” and “”, values 1-5 for “” and “”, and values 1-64 for “”. Defaults to “”
- `disable_notification`: (Boolean) Sends the message silently. Users will receive a notification with no sound.
- `protect_content`: (Boolean) Protects the contents of the sent message from forwarding
- `reply_to_message_id`: (Integer) If the message is a reply, ID of the original message
- `allow_sending_without_reply`: (Boolean) Pass True if the message should be sent even if the specified replied-to message is not found
- `reply_markup`: (InlineKeyboardMarkup or ReplyKeyboardMarkup or ReplyKeyboardRemove or ForceReply) Additional interface options. A JSON-serialized object for an inline keyboard, custom reply keyboard, instructions to remove reply keyboard or to force a reply from the user.
[Function documentation source](https://core.telegram.org/bots/api#senddice)
"""),
(:sendChatAction, """
sendChatAction([tg::TelegramClient]; kwargs...)
Use this method when you need to tell the user that something is happening on the bot's side. The status is set for 5 seconds or less (when a message arrives from your bot, Telegram clients clear its typing status). Returns True on success.
Example: The ImageBot needs some time to process a request and upload the image. Instead of sending a text message along the lines of “Retrieving image, please wait…”, the bot may use [`sendChatAction`](@ref) with action = upload_photo. The user will see a “sending photo” status for the bot.
We only recommend using this method when a response from the bot will take a noticeable amount of time to arrive.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target channel (in the format `@channelusername`)
- `action`: (String) Type of action to broadcast. Choose one, depending on what the user is about to receive: typing for [text messages](https://core.telegram.org/bots/api#sendmessage), upload_photo for [photos](https://core.telegram.org/bots/api#sendphoto), record_video or upload_video for [videos](https://core.telegram.org/bots/api#sendvideo), record_voice or upload_voice for [voice notes](https://core.telegram.org/bots/api#sendvoice), upload_document for [general files](https://core.telegram.org/bots/api#senddocument), choose_sticker for [stickers](https://core.telegram.org/bots/api#sendsticker), find_location for [location data](https://core.telegram.org/bots/api#sendlocation), record_video_note or upload_video_note for [video notes](https://core.telegram.org/bots/api#sendvideonote).
# Optional arguments
- `message_thread_id`: (Integer) Unique identifier for the target message thread; supergroups only
[Function documentation source](https://core.telegram.org/bots/api#sendchataction)
"""),
(:getUserProfilePhotos, """
getUserProfilePhotos([tg::TelegramClient]; kwargs...)
Use this method to get a list of profile pictures for a user. Returns a [UserProfilePhotos](https://core.telegram.org/bots/api#userprofilephotos) object.
# Required arguments
- `user_id`: (Integer) Unique identifier of the target user
# Optional arguments
- `offset`: (Integer) Sequential number of the first photo to be returned. By default, all photos are returned.
- `limit`: (Integer) Limits the number of photos to be retrieved. Values between 1-100 are accepted. Defaults to 100.
[Function documentation source](https://core.telegram.org/bots/api#getuserprofilephotos)
"""),
(:getFile, """
getFile([tg::TelegramClient]; kwargs...)
Use this method to get basic information about a file and prepare it for downloading. For the moment, bots can download files of up to 20MB in size. On success, a [File](https://core.telegram.org/bots/api#file) object is returned. The file can then be downloaded via the link `https://api.telegram.org/file/bot<token>/<file_path>`, where `<file_path>` is taken from the response. It is guaranteed that the link will be valid for at least 1 hour. When the link expires, a new one can be requested by calling [`getFile`](@ref) again.
# Required arguments
- `file_id`: (String) File identifier to get information about
Note: This function may not preserve the original file name and MIME type. You should save the file's MIME type and name (if available) when the File object is received.
[Function documentation source](https://core.telegram.org/bots/api#getfile)
"""),
(:banChatMember, """
banChatMember([tg::TelegramClient]; kwargs...)
Use this method to ban a user in a group, a supergroup or a channel. In the case of supergroups and channels, the user will not be able to return to the chat on their own using invite links, etc., unless [unbanned](https://core.telegram.org/bots/api#unbanchatmember) first. The bot must be an administrator in the chat for this to work and must have the appropriate administrator rights. Returns True on success.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target group or username of the target supergroup or channel (in the format `@channelusername`)
- `user_id`: (Integer) Unique identifier of the target user
# Optional arguments
- `until_date`: (Integer) Date when the user will be unbanned, unix time. If user is banned for more than 366 days or less than 30 seconds from the current time they are considered to be banned forever. Applied for supergroups and channels only.
- `revoke_messages`: (Boolean) Pass True to delete all messages from the chat for the user that is being removed. If False, the user will be able to see messages in the group that were sent before the user was removed. Always True for supergroups and channels.
[Function documentation source](https://core.telegram.org/bots/api#banchatmember)
"""),
(:unbanChatMember, """
unbanChatMember([tg::TelegramClient]; kwargs...)
Use this method to unban a previously banned user in a supergroup or channel. The user will not return to the group or channel automatically, but will be able to join via link, etc. The bot must be an administrator for this to work. By default, this method guarantees that after the call the user is not a member of the chat, but will be able to join it. So if the user is a member of the chat they will also be removed from the chat. If you don't want this, use the parameter only_if_banned. Returns True on success.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target group or username of the target supergroup or channel (in the format `@channelusername`)
- `user_id`: (Integer) Unique identifier of the target user
# Optional arguments
- `only_if_banned`: (Boolean) Do nothing if the user is not banned
[Function documentation source](https://core.telegram.org/bots/api#unbanchatmember)
"""),
(:restrictChatMember, """
restrictChatMember([tg::TelegramClient]; kwargs...)
Use this method to restrict a user in a supergroup. The bot must be an administrator in the supergroup for this to work and must have the appropriate administrator rights. Pass True for all permissions to lift restrictions from a user. Returns True on success.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target supergroup (in the format `@supergroupusername`)
- `user_id`: (Integer) Unique identifier of the target user
- `permissions`: (ChatPermissions) A JSON-serialized object for new user permissions
# Optional arguments
- `use_independent_chat_permissions`: (Boolean) Pass True if chat permissions are set independently. Otherwise, the can_send_other_messages and can_add_web_page_previews permissions will imply the can_send_messages, can_send_audios, can_send_documents, can_send_photos, can_send_videos, can_send_video_notes, and can_send_voice_notes permissions; the can_send_polls permission will imply the can_send_messages permission.
- `until_date`: (Integer) Date when restrictions will be lifted for the user, unix time. If user is restricted for more than 366 days or less than 30 seconds from the current time, they are considered to be restricted forever
[Function documentation source](https://core.telegram.org/bots/api#restrictchatmember)
"""),
(:promoteChatMember, """
promoteChatMember([tg::TelegramClient]; kwargs...)
Use this method to promote or demote a user in a supergroup or a channel. The bot must be an administrator in the chat for this to work and must have the appropriate administrator rights. Pass False for all boolean parameters to demote a user. Returns True on success.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target channel (in the format `@channelusername`)
- `user_id`: (Integer) Unique identifier of the target user
# Optional arguments
- `is_anonymous`: (Boolean) Pass True if the administrator's presence in the chat is hidden
- `can_manage_chat`: (Boolean) Pass True if the administrator can access the chat event log, chat statistics, message statistics in channels, see channel members, see anonymous administrators in supergroups and ignore slow mode. Implied by any other administrator privilege
- `can_post_messages`: (Boolean) Pass True if the administrator can create channel posts, channels only
- `can_edit_messages`: (Boolean) Pass True if the administrator can edit messages of other users and can pin messages, channels only
- `can_delete_messages`: (Boolean) Pass True if the administrator can delete messages of other users
- `can_manage_video_chats`: (Boolean) Pass True if the administrator can manage video chats
- `can_restrict_members`: (Boolean) Pass True if the administrator can restrict, ban or unban chat members
- `can_promote_members`: (Boolean) Pass True if the administrator can add new administrators with a subset of their own privileges or demote administrators that they have promoted, directly or indirectly (promoted by administrators that were appointed by him)
- `can_change_info`: (Boolean) Pass True if the administrator can change chat title, photo and other settings
- `can_invite_users`: (Boolean) Pass True if the administrator can invite new users to the chat
- `can_pin_messages`: (Boolean) Pass True if the administrator can pin messages, supergroups only
- `can_manage_topics`: (Boolean) Pass True if the user is allowed to create, rename, close, and reopen forum topics, supergroups only
[Function documentation source](https://core.telegram.org/bots/api#promotechatmember)
"""),
(:setChatAdministratorCustomTitle, """
setChatAdministratorCustomTitle([tg::TelegramClient]; kwargs...)
Use this method to set a custom title for an administrator in a supergroup promoted by the bot. Returns True on success.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target supergroup (in the format `@supergroupusername`)
- `user_id`: (Integer) Unique identifier of the target user
- `custom_title`: (String) New custom title for the administrator; 0-16 characters, emoji are not allowed
[Function documentation source](https://core.telegram.org/bots/api#setchatadministratorcustomtitle)
"""),
(:banChatSenderChat, """
banChatSenderChat([tg::TelegramClient]; kwargs...)
Use this method to ban a channel chat in a supergroup or a channel. Until the chat is [unbanned](https://core.telegram.org/bots/api#unbanchatsenderchat), the owner of the banned chat won't be able to send messages on behalf of any of their channels. The bot must be an administrator in the supergroup or channel for this to work and must have the appropriate administrator rights. Returns True on success.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target channel (in the format `@channelusername`)
- `sender_chat_id`: (Integer) Unique identifier of the target sender chat
[Function documentation source](https://core.telegram.org/bots/api#banchatsenderchat)
"""),
(:unbanChatSenderChat, """
unbanChatSenderChat([tg::TelegramClient]; kwargs...)
Use this method to unban a previously banned channel chat in a supergroup or channel. The bot must be an administrator for this to work and must have the appropriate administrator rights. Returns True on success.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target channel (in the format `@channelusername`)
- `sender_chat_id`: (Integer) Unique identifier of the target sender chat
[Function documentation source](https://core.telegram.org/bots/api#unbanchatsenderchat)
"""),
(:setChatPermissions, """
setChatPermissions([tg::TelegramClient]; kwargs...)
Use this method to set default chat permissions for all members. The bot must be an administrator in the group or a supergroup for this to work and must have the can_restrict_members administrator rights. Returns True on success.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target supergroup (in the format `@supergroupusername`)
- `permissions`: (ChatPermissions) A JSON-serialized object for new default chat permissions
# Optional arguments
- `use_independent_chat_permissions`: (Boolean) Pass True if chat permissions are set independently. Otherwise, the can_send_other_messages and can_add_web_page_previews permissions will imply the can_send_messages, can_send_audios, can_send_documents, can_send_photos, can_send_videos, can_send_video_notes, and can_send_voice_notes permissions; the can_send_polls permission will imply the can_send_messages permission.
[Function documentation source](https://core.telegram.org/bots/api#setchatpermissions)
"""),
(:exportChatInviteLink, """
exportChatInviteLink([tg::TelegramClient]; kwargs...)
Use this method to generate a new primary invite link for a chat; any previously generated primary link is revoked. The bot must be an administrator in the chat for this to work and must have the appropriate administrator rights. Returns the new invite link as String on success.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target channel (in the format `@channelusername`)
Note: Each administrator in a chat generates their own invite links. Bots can't use invite links generated by other administrators. If you want your bot to work with invite links, it will need to generate its own link using [`exportChatInviteLink`](@ref) or by calling the [`getChat`](@ref) method. If your bot needs to generate a new primary invite link replacing its previous one, use [`exportChatInviteLink`](@ref) again.
[Function documentation source](https://core.telegram.org/bots/api#exportchatinvitelink)
"""),
(:createChatInviteLink, """
createChatInviteLink([tg::TelegramClient]; kwargs...)
Use this method to create an additional invite link for a chat. The bot must be an administrator in the chat for this to work and must have the appropriate administrator rights. The link can be revoked using the method [`revokeChatInviteLink`](@ref). Returns the new invite link as [ChatInviteLink](https://core.telegram.org/bots/api#chatinvitelink) object.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target channel (in the format `@channelusername`)
# Optional arguments
- `name`: (String) Invite link name; 0-32 characters
- `expire_date`: (Integer) Point in time (Unix timestamp) when the link will expire
- `member_limit`: (Integer) The maximum number of users that can be members of the chat simultaneously after joining the chat via this invite link; 1-99999
- `creates_join_request`: (Boolean) True, if users joining the chat via the link need to be approved by chat administrators. If True, member_limit can't be specified
[Function documentation source](https://core.telegram.org/bots/api#createchatinvitelink)
"""),
(:editChatInviteLink, """
editChatInviteLink([tg::TelegramClient]; kwargs...)
Use this method to edit a non-primary invite link created by the bot. The bot must be an administrator in the chat for this to work and must have the appropriate administrator rights. Returns the edited invite link as a [ChatInviteLink](https://core.telegram.org/bots/api#chatinvitelink) object.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target channel (in the format `@channelusername`)
- `invite_link`: (String) The invite link to edit
# Optional arguments
- `name`: (String) Invite link name; 0-32 characters
- `expire_date`: (Integer) Point in time (Unix timestamp) when the link will expire
- `member_limit`: (Integer) The maximum number of users that can be members of the chat simultaneously after joining the chat via this invite link; 1-99999
- `creates_join_request`: (Boolean) True, if users joining the chat via the link need to be approved by chat administrators. If True, member_limit can't be specified
[Function documentation source](https://core.telegram.org/bots/api#editchatinvitelink)
"""),
(:revokeChatInviteLink, """
revokeChatInviteLink([tg::TelegramClient]; kwargs...)
Use this method to revoke an invite link created by the bot. If the primary link is revoked, a new link is automatically generated. The bot must be an administrator in the chat for this to work and must have the appropriate administrator rights. Returns the revoked invite link as [ChatInviteLink](https://core.telegram.org/bots/api#chatinvitelink) object.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier of the target chat or username of the target channel (in the format `@channelusername`)
- `invite_link`: (String) The invite link to revoke
[Function documentation source](https://core.telegram.org/bots/api#revokechatinvitelink)
"""),
(:approveChatJoinRequest, """
approveChatJoinRequest([tg::TelegramClient]; kwargs...)
Use this method to approve a chat join request. The bot must be an administrator in the chat for this to work and must have the can_invite_users administrator right. Returns True on success.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target channel (in the format `@channelusername`)
- `user_id`: (Integer) Unique identifier of the target user
[Function documentation source](https://core.telegram.org/bots/api#approvechatjoinrequest)
"""),
(:declineChatJoinRequest, """
declineChatJoinRequest([tg::TelegramClient]; kwargs...)
Use this method to decline a chat join request. The bot must be an administrator in the chat for this to work and must have the can_invite_users administrator right. Returns True on success.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target channel (in the format `@channelusername`)
- `user_id`: (Integer) Unique identifier of the target user
[Function documentation source](https://core.telegram.org/bots/api#declinechatjoinrequest)
"""),
(:setChatPhoto, """
setChatPhoto([tg::TelegramClient]; kwargs...)
Use this method to set a new profile photo for the chat. Photos can't be changed for private chats. The bot must be an administrator in the chat for this to work and must have the appropriate administrator rights. Returns True on success.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target channel (in the format `@channelusername`)
- `photo`: (InputFile) New chat photo, uploaded using multipart/form-data
[Function documentation source](https://core.telegram.org/bots/api#setchatphoto)
"""),
(:deleteChatPhoto, """
deleteChatPhoto([tg::TelegramClient]; kwargs...)
Use this method to delete a chat photo. Photos can't be changed for private chats. The bot must be an administrator in the chat for this to work and must have the appropriate administrator rights. Returns True on success.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target channel (in the format `@channelusername`)
[Function documentation source](https://core.telegram.org/bots/api#deletechatphoto)
"""),
(:setChatTitle, """
setChatTitle([tg::TelegramClient]; kwargs...)
Use this method to change the title of a chat. Titles can't be changed for private chats. The bot must be an administrator in the chat for this to work and must have the appropriate administrator rights. Returns True on success.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target channel (in the format `@channelusername`)
- `title`: (String) New chat title, 1-128 characters
[Function documentation source](https://core.telegram.org/bots/api#setchattitle)
"""),
(:setChatDescription, """
setChatDescription([tg::TelegramClient]; kwargs...)
Use this method to change the description of a group, a supergroup or a channel. The bot must be an administrator in the chat for this to work and must have the appropriate administrator rights. Returns True on success.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target channel (in the format `@channelusername`)
# Optional arguments
- `description`: (String) New chat description, 0-255 characters
[Function documentation source](https://core.telegram.org/bots/api#setchatdescription)
"""),
(:pinChatMessage, """
pinChatMessage([tg::TelegramClient]; kwargs...)
Use this method to add a message to the list of pinned messages in a chat. If the chat is not a private chat, the bot must be an administrator in the chat for this to work and must have the 'can_pin_messages' administrator right in a supergroup or 'can_edit_messages' administrator right in a channel. Returns True on success.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target channel (in the format `@channelusername`)
- `message_id`: (Integer) Identifier of a message to pin
# Optional arguments
- `disable_notification`: (Boolean) Pass True if it is not necessary to send a notification to all chat members about the new pinned message. Notifications are always disabled in channels and private chats.
[Function documentation source](https://core.telegram.org/bots/api#pinchatmessage)
"""),
(:unpinChatMessage, """
unpinChatMessage([tg::TelegramClient]; kwargs...)
Use this method to remove a message from the list of pinned messages in a chat. If the chat is not a private chat, the bot must be an administrator in the chat for this to work and must have the 'can_pin_messages' administrator right in a supergroup or 'can_edit_messages' administrator right in a channel. Returns True on success.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target channel (in the format `@channelusername`)
# Optional arguments
- `message_id`: (Integer) Identifier of a message to unpin. If not specified, the most recent pinned message (by sending date) will be unpinned.
[Function documentation source](https://core.telegram.org/bots/api#unpinchatmessage)
"""),
(:unpinAllChatMessages, """
unpinAllChatMessages([tg::TelegramClient]; kwargs...)
Use this method to clear the list of pinned messages in a chat. If the chat is not a private chat, the bot must be an administrator in the chat for this to work and must have the 'can_pin_messages' administrator right in a supergroup or 'can_edit_messages' administrator right in a channel. Returns True on success.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target channel (in the format `@channelusername`)
[Function documentation source](https://core.telegram.org/bots/api#unpinallchatmessages)
"""),
(:leaveChat, """
leaveChat([tg::TelegramClient]; kwargs...)
Use this method for your bot to leave a group, supergroup or channel. Returns True on success.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target supergroup or channel (in the format `@channelusername`)
[Function documentation source](https://core.telegram.org/bots/api#leavechat)
"""),
(:getChat, """
getChat([tg::TelegramClient]; kwargs...)
Use this method to get up to date information about the chat (current name of the user for one-on-one conversations, current username of a user, group or channel, etc.). Returns a [Chat](https://core.telegram.org/bots/api#chat) object on success.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target supergroup or channel (in the format `@channelusername`)
[Function documentation source](https://core.telegram.org/bots/api#getchat)
"""),
(:getChatAdministrators, """
getChatAdministrators([tg::TelegramClient]; kwargs...)
Use this method to get a list of administrators in a chat, which aren't bots. Returns an Array of [ChatMember](https://core.telegram.org/bots/api#chatmember) objects.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target supergroup or channel (in the format `@channelusername`)
[Function documentation source](https://core.telegram.org/bots/api#getchatadministrators)
"""),
(:getChatMemberCount, """
getChatMemberCount([tg::TelegramClient]; kwargs...)
Use this method to get the number of members in a chat. Returns Int on success.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target supergroup or channel (in the format `@channelusername`)
[Function documentation source](https://core.telegram.org/bots/api#getchatmembercount)
"""),
(:getChatMember, """
getChatMember([tg::TelegramClient]; kwargs...)
Use this method to get information about a member of a chat. The method is only guaranteed to work for other users if the bot is an administrator in the chat. Returns a [ChatMember](https://core.telegram.org/bots/api#chatmember) object on success.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target supergroup or channel (in the format `@channelusername`)
- `user_id`: (Integer) Unique identifier of the target user
[Function documentation source](https://core.telegram.org/bots/api#getchatmember)
"""),
(:setChatStickerSet, """
setChatStickerSet([tg::TelegramClient]; kwargs...)
Use this method to set a new group sticker set for a supergroup. The bot must be an administrator in the chat for this to work and must have the appropriate administrator rights. Use the field can_set_sticker_set optionally returned in [`getChat`](@ref) requests to check if the bot can use this method. Returns True on success.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target supergroup (in the format `@supergroupusername`)
- `sticker_set_name`: (String) Name of the sticker set to be set as the group sticker set
[Function documentation source](https://core.telegram.org/bots/api#setchatstickerset)
"""),
(:deleteChatStickerSet, """
deleteChatStickerSet([tg::TelegramClient]; kwargs...)
Use this method to delete a group sticker set from a supergroup. The bot must be an administrator in the chat for this to work and must have the appropriate administrator rights. Use the field can_set_sticker_set optionally returned in [`getChat`](@ref) requests to check if the bot can use this method. Returns True on success.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target supergroup (in the format `@supergroupusername`)
[Function documentation source](https://core.telegram.org/bots/api#deletechatstickerset)
"""),
(:getForumTopicIconStickers, """
getForumTopicIconStickers([tg::TelegramClient]; kwargs...)
Use this method to get custom emoji stickers, which can be used as a forum topic icon by any user. Requires no parameters. Returns an Array of [Sticker](https://core.telegram.org/bots/api#sticker) objects.
[Function documentation source](https://core.telegram.org/bots/api#getforumtopiciconstickers)
"""),
(:createForumTopic, """
createForumTopic([tg::TelegramClient]; kwargs...)
Use this method to create a topic in a forum supergroup chat. The bot must be an administrator in the chat for this to work and must have the can_manage_topics administrator rights. Returns information about the created topic as a [ForumTopic](https://core.telegram.org/bots/api#forumtopic) object.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target supergroup (in the format `@supergroupusername`)
- `name`: (String) Topic name, 1-128 characters
# Optional arguments
- `icon_color`: (Integer) Color of the topic icon in RGB format. Currently, must be one of 7322096 (0x6FB9F0), 16766590 (0xFFD67E), 13338331 (0xCB86DB), 9367192 (0x8EEE98), 16749490 (0xFF93B2), or 16478047 (0xFB6F5F)
- `icon_custom_emoji_id`: (String) Unique identifier of the custom emoji shown as the topic icon. Use [`getForumTopicIconStickers`](@ref) to get all allowed custom emoji identifiers.
[Function documentation source](https://core.telegram.org/bots/api#createforumtopic)
"""),
(:editForumTopic, """
editForumTopic([tg::TelegramClient]; kwargs...)
Use this method to edit name and icon of a topic in a forum supergroup chat. The bot must be an administrator in the chat for this to work and must have can_manage_topics administrator rights, unless it is the creator of the topic. Returns True on success.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target supergroup (in the format `@supergroupusername`)
- `message_thread_id`: (Integer) Unique identifier for the target message thread of the forum topic
# Optional arguments
- `name`: (String) New topic name, 0-128 characters. If not specified or empty, the current name of the topic will be kept
- `icon_custom_emoji_id`: (String) New unique identifier of the custom emoji shown as the topic icon. Use [`getForumTopicIconStickers`](@ref) to get all allowed custom emoji identifiers. Pass an empty string to remove the icon. If not specified, the current icon will be kept
[Function documentation source](https://core.telegram.org/bots/api#editforumtopic)
"""),
(:closeForumTopic, """
closeForumTopic([tg::TelegramClient]; kwargs...)
Use this method to close an open topic in a forum supergroup chat. The bot must be an administrator in the chat for this to work and must have the can_manage_topics administrator rights, unless it is the creator of the topic. Returns True on success.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target supergroup (in the format `@supergroupusername`)
- `message_thread_id`: (Integer) Unique identifier for the target message thread of the forum topic
[Function documentation source](https://core.telegram.org/bots/api#closeforumtopic)
"""),
(:reopenForumTopic, """
reopenForumTopic([tg::TelegramClient]; kwargs...)
Use this method to reopen a closed topic in a forum supergroup chat. The bot must be an administrator in the chat for this to work and must have the can_manage_topics administrator rights, unless it is the creator of the topic. Returns True on success.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target supergroup (in the format `@supergroupusername`)
- `message_thread_id`: (Integer) Unique identifier for the target message thread of the forum topic
[Function documentation source](https://core.telegram.org/bots/api#reopenforumtopic)
"""),
(:deleteForumTopic, """
deleteForumTopic([tg::TelegramClient]; kwargs...)
Use this method to delete a forum topic along with all its messages in a forum supergroup chat. The bot must be an administrator in the chat for this to work and must have the can_delete_messages administrator rights. Returns True on success.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target supergroup (in the format `@supergroupusername`)
- `message_thread_id`: (Integer) Unique identifier for the target message thread of the forum topic
[Function documentation source](https://core.telegram.org/bots/api#deleteforumtopic)
"""),
(:unpinAllForumTopicMessages, """
unpinAllForumTopicMessages([tg::TelegramClient]; kwargs...)
Use this method to clear the list of pinned messages in a forum topic. The bot must be an administrator in the chat for this to work and must have the can_pin_messages administrator right in the supergroup. Returns True on success.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target supergroup (in the format `@supergroupusername`)
- `message_thread_id`: (Integer) Unique identifier for the target message thread of the forum topic
[Function documentation source](https://core.telegram.org/bots/api#unpinallforumtopicmessages)
"""),
(:editGeneralForumTopic, """
editGeneralForumTopic([tg::TelegramClient]; kwargs...)
Use this method to edit the name of the 'General' topic in a forum supergroup chat. The bot must be an administrator in the chat for this to work and must have can_manage_topics administrator rights. Returns True on success.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target supergroup (in the format `@supergroupusername`)
- `name`: (String) New topic name, 1-128 characters
[Function documentation source](https://core.telegram.org/bots/api#editgeneralforumtopic)
"""),
(:closeGeneralForumTopic, """
closeGeneralForumTopic([tg::TelegramClient]; kwargs...)
Use this method to close an open 'General' topic in a forum supergroup chat. The bot must be an administrator in the chat for this to work and must have the can_manage_topics administrator rights. Returns True on success.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target supergroup (in the format `@supergroupusername`)
[Function documentation source](https://core.telegram.org/bots/api#closegeneralforumtopic)
"""),
(:reopenGeneralForumTopic, """
reopenGeneralForumTopic([tg::TelegramClient]; kwargs...)
Use this method to reopen a closed 'General' topic in a forum supergroup chat. The bot must be an administrator in the chat for this to work and must have the can_manage_topics administrator rights. The topic will be automatically unhidden if it was hidden. Returns True on success.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target supergroup (in the format `@supergroupusername`)
[Function documentation source](https://core.telegram.org/bots/api#reopengeneralforumtopic)
"""),
(:hideGeneralForumTopic, """
hideGeneralForumTopic([tg::TelegramClient]; kwargs...)
Use this method to hide the 'General' topic in a forum supergroup chat. The bot must be an administrator in the chat for this to work and must have the can_manage_topics administrator rights. The topic will be automatically closed if it was open. Returns True on success.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target supergroup (in the format `@supergroupusername`)
[Function documentation source](https://core.telegram.org/bots/api#hidegeneralforumtopic)
"""),
(:unhideGeneralForumTopic, """
unhideGeneralForumTopic([tg::TelegramClient]; kwargs...)
Use this method to unhide the 'General' topic in a forum supergroup chat. The bot must be an administrator in the chat for this to work and must have the can_manage_topics administrator rights. Returns True on success.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target supergroup (in the format `@supergroupusername`)
[Function documentation source](https://core.telegram.org/bots/api#unhidegeneralforumtopic)
"""),
(:answerCallbackQuery, """
answerCallbackQuery([tg::TelegramClient]; kwargs...)
Use this method to send answers to callback queries sent from inline keyboards. The answer will be displayed to the user as a notification at the top of the chat screen or as an alert. On success, True is returned.
Alternatively, the user can be redirected to the specified Game URL. For this option to work, you must first create a game for your bot via @BotFather and accept the terms. Otherwise, you may use links like `t.me/your_bot?start=XXXX` that open your bot with a parameter.
# Required arguments
- `callback_query_id`: (String) Unique identifier for the query to be answered
# Optional arguments
- `text`: (String) Text of the notification. If not specified, nothing will be shown to the user, 0-200 characters
- `show_alert`: (Boolean) If True, an alert will be shown by the client instead of a notification at the top of the chat screen. Defaults to false.
- `url`: (String) URL that will be opened by the user's client. If you have created a [Game](https://core.telegram.org/bots/api#game) and accepted the conditions via @BotFather, specify the URL that opens your game - note that this will only work if the query comes from a [callback_game](https://core.telegram.org/bots/api#inlinekeyboardbutton) button.Otherwise, you may use links like `t.me/your_bot?start=XXXX` that open your bot with a parameter.
- `cache_time`: (Integer) The maximum amount of time in seconds that the result of the callback query may be cached client-side. Telegram apps will support caching starting in version 3.14. Defaults to 0.
[Function documentation source](https://core.telegram.org/bots/api#answercallbackquery)
"""),
(:setMyCommands, """
setMyCommands([tg::TelegramClient]; kwargs...)
Use this method to change the list of the bot's commands. See this manual for more details about bot commands. Returns True on success.
# Required arguments
- `commands`: (Array of BotCommand) A JSON-serialized list of bot commands to be set as the list of the bot's commands. At most 100 commands can be specified.
# Optional arguments
- `scope`: (BotCommandScope) A JSON-serialized object, describing scope of users for which the commands are relevant. Defaults to [BotCommandScopeDefault](https://core.telegram.org/bots/api#botcommandscopedefault).
- `language_code`: (String) A two-letter ISO 639-1 language code. If empty, commands will be applied to all users from the given scope, for whose language there are no dedicated commands
[Function documentation source](https://core.telegram.org/bots/api#setmycommands)
"""),
(:deleteMyCommands, """
deleteMyCommands([tg::TelegramClient]; kwargs...)
Use this method to delete the list of the bot's commands for the given scope and user language. After deletion, [higher level commands](https://core.telegram.org/bots/api#determining-list-of-commands) will be shown to affected users. Returns True on success.
# Optional arguments
- `scope`: (BotCommandScope) A JSON-serialized object, describing scope of users for which the commands are relevant. Defaults to [BotCommandScopeDefault](https://core.telegram.org/bots/api#botcommandscopedefault).
- `language_code`: (String) A two-letter ISO 639-1 language code. If empty, commands will be applied to all users from the given scope, for whose language there are no dedicated commands
[Function documentation source](https://core.telegram.org/bots/api#deletemycommands)
"""),
(:getMyCommands, """
getMyCommands([tg::TelegramClient]; kwargs...)
Use this method to get the current list of the bot's commands for the given scope and user language. Returns an Array of [BotCommand](https://core.telegram.org/bots/api#botcommand) objects. If commands aren't set, an empty list is returned.
# Optional arguments
- `scope`: (BotCommandScope) A JSON-serialized object, describing scope of users. Defaults to [BotCommandScopeDefault](https://core.telegram.org/bots/api#botcommandscopedefault).
- `language_code`: (String) A two-letter ISO 639-1 language code or an empty string
[Function documentation source](https://core.telegram.org/bots/api#getmycommands)
"""),
(:setMyName, """
setMyName([tg::TelegramClient]; kwargs...)
Use this method to change the bot's name. Returns True on success.
# Optional arguments
- `name`: (String) New bot name; 0-64 characters. Pass an empty string to remove the dedicated name for the given language.
- `language_code`: (String) A two-letter ISO 639-1 language code. If empty, the name will be shown to all users for whose language there is no dedicated name.
[Function documentation source](https://core.telegram.org/bots/api#setmyname)
"""),
(:getMyName, """
getMyName([tg::TelegramClient]; kwargs...)
Use this method to get the current bot name for the given user language. Returns [BotName](https://core.telegram.org/bots/api#botname) on success.
# Optional arguments
- `language_code`: (String) A two-letter ISO 639-1 language code or an empty string
[Function documentation source](https://core.telegram.org/bots/api#getmyname)
"""),
(:setMyDescription, """
setMyDescription([tg::TelegramClient]; kwargs...)
Use this method to change the bot's description, which is shown in the chat with the bot if the chat is empty. Returns True on success.
# Optional arguments
- `description`: (String) New bot description; 0-512 characters. Pass an empty string to remove the dedicated description for the given language.
- `language_code`: (String) A two-letter ISO 639-1 language code. If empty, the description will be applied to all users for whose language there is no dedicated description.
[Function documentation source](https://core.telegram.org/bots/api#setmydescription)
"""),
(:getMyDescription, """
getMyDescription([tg::TelegramClient]; kwargs...)
Use this method to get the current bot description for the given user language. Returns [BotDescription](https://core.telegram.org/bots/api#botdescription) on success.
# Optional arguments
- `language_code`: (String) A two-letter ISO 639-1 language code or an empty string
[Function documentation source](https://core.telegram.org/bots/api#getmydescription)
"""),
(:setMyShortDescription, """
setMyShortDescription([tg::TelegramClient]; kwargs...)
Use this method to change the bot's short description, which is shown on the bot's profile page and is sent together with the link when users share the bot. Returns True on success.
# Optional arguments
- `short_description`: (String) New short description for the bot; 0-120 characters. Pass an empty string to remove the dedicated short description for the given language.
- `language_code`: (String) A two-letter ISO 639-1 language code. If empty, the short description will be applied to all users for whose language there is no dedicated short description.
[Function documentation source](https://core.telegram.org/bots/api#setmyshortdescription)
"""),
(:getMyShortDescription, """
getMyShortDescription([tg::TelegramClient]; kwargs...)
Use this method to get the current bot short description for the given user language. Returns [BotShortDescription](https://core.telegram.org/bots/api#botshortdescription) on success.
# Optional arguments
- `language_code`: (String) A two-letter ISO 639-1 language code or an empty string
[Function documentation source](https://core.telegram.org/bots/api#getmyshortdescription)
"""),
(:setChatMenuButton, """
setChatMenuButton([tg::TelegramClient]; kwargs...)
Use this method to change the bot's menu button in a private chat, or the default menu button. Returns True on success.
# Optional arguments
- `chat_id`: (Integer) Unique identifier for the target private chat. If not specified, default bot's menu button will be changed
- `menu_button`: (MenuButton) A JSON-serialized object for the bot's new menu button. Defaults to [MenuButtonDefault](https://core.telegram.org/bots/api#menubuttondefault)
[Function documentation source](https://core.telegram.org/bots/api#setchatmenubutton)
"""),
(:getChatMenuButton, """
getChatMenuButton([tg::TelegramClient]; kwargs...)
Use this method to get the current value of the bot's menu button in a private chat, or the default menu button. Returns [MenuButton](https://core.telegram.org/bots/api#menubutton) on success.
# Optional arguments
- `chat_id`: (Integer) Unique identifier for the target private chat. If not specified, default bot's menu button will be returned
[Function documentation source](https://core.telegram.org/bots/api#getchatmenubutton)
"""),
(:setMyDefaultAdministratorRights, """
setMyDefaultAdministratorRights([tg::TelegramClient]; kwargs...)
Use this method to change the default administrator rights requested by the bot when it's added as an administrator to groups or channels. These rights will be suggested to users, but they are free to modify the list before adding the bot. Returns True on success.
# Optional arguments
- `rights`: (ChatAdministratorRights) A JSON-serialized object describing new default administrator rights. If not specified, the default administrator rights will be cleared.
- `for_channels`: (Boolean) Pass True to change the default administrator rights of the bot in channels. Otherwise, the default administrator rights of the bot for groups and supergroups will be changed.
[Function documentation source](https://core.telegram.org/bots/api#setmydefaultadministratorrights)
"""),
(:getMyDefaultAdministratorRights, """
getMyDefaultAdministratorRights([tg::TelegramClient]; kwargs...)
Use this method to get the current default administrator rights of the bot. Returns [ChatAdministratorRights](https://core.telegram.org/bots/api#chatadministratorrights) on success.
# Optional arguments
- `for_channels`: (Boolean) Pass True to get default administrator rights of the bot in channels. Otherwise, default administrator rights of the bot for groups and supergroups will be returned.
[Function documentation source](https://core.telegram.org/bots/api#getmydefaultadministratorrights)
"""),
(:editMessageText, """
editMessageText([tg::TelegramClient]; kwargs...)
Use this method to edit text and [game](https://core.telegram.org/bots/api#games) messages. On success, if the edited message is not an inline message, the edited [Message](https://core.telegram.org/bots/api#message) is returned, otherwise True is returned.
# Required arguments
- `text`: (String) New text of the message, 1-4096 characters after entities parsing
# Optional arguments
- `chat_id`: (Integer or String) Required if inline_message_id is not specified. Unique identifier for the target chat or username of the target channel (in the format `@channelusername`)
- `message_id`: (Integer) Required if inline_message_id is not specified. Identifier of the message to edit
- `inline_message_id`: (String) Required if chat_id and message_id are not specified. Identifier of the inline message
- `parse_mode`: (String) Mode for parsing entities in the message text. See [formatting options](https://core.telegram.org/bots/api#formatting-options) for more details.
- `entities`: (Array of MessageEntity) A JSON-serialized list of special entities that appear in message text, which can be specified instead of parse_mode
- `disable_web_page_preview`: (Boolean) Disables link previews for links in this message
- `reply_markup`: (InlineKeyboardMarkup) A JSON-serialized object for an inline keyboard.
[Function documentation source](https://core.telegram.org/bots/api#editmessagetext)
"""),
(:editMessageCaption, """
editMessageCaption([tg::TelegramClient]; kwargs...)
Use this method to edit captions of messages. On success, if the edited message is not an inline message, the edited [Message](https://core.telegram.org/bots/api#message) is returned, otherwise True is returned.
# Optional arguments
- `chat_id`: (Integer or String) Required if inline_message_id is not specified. Unique identifier for the target chat or username of the target channel (in the format `@channelusername`)
- `message_id`: (Integer) Required if inline_message_id is not specified. Identifier of the message to edit
- `inline_message_id`: (String) Required if chat_id and message_id are not specified. Identifier of the inline message
- `caption`: (String) New caption of the message, 0-1024 characters after entities parsing
- `parse_mode`: (String) Mode for parsing entities in the message caption. See [formatting options](https://core.telegram.org/bots/api#formatting-options) for more details.
- `caption_entities`: (Array of MessageEntity) A JSON-serialized list of special entities that appear in the caption, which can be specified instead of parse_mode
- `reply_markup`: (InlineKeyboardMarkup) A JSON-serialized object for an inline keyboard.
[Function documentation source](https://core.telegram.org/bots/api#editmessagecaption)
"""),
(:editMessageMedia, """
editMessageMedia([tg::TelegramClient]; kwargs...)
Use this method to edit animation, audio, document, photo, or video messages. If a message is part of a message album, then it can be edited only to an audio for audio albums, only to a document for document albums and to a photo or a video otherwise. When an inline message is edited, a new file can't be uploaded; use a previously uploaded file via its file_id or specify a URL. On success, if the edited message is not an inline message, the edited [Message](https://core.telegram.org/bots/api#message) is returned, otherwise True is returned.
# Required arguments
- `media`: (InputMedia) A JSON-serialized object for a new media content of the message
# Optional arguments
- `chat_id`: (Integer or String) Required if inline_message_id is not specified. Unique identifier for the target chat or username of the target channel (in the format `@channelusername`)
- `message_id`: (Integer) Required if inline_message_id is not specified. Identifier of the message to edit
- `inline_message_id`: (String) Required if chat_id and message_id are not specified. Identifier of the inline message
- `reply_markup`: (InlineKeyboardMarkup) A JSON-serialized object for a new inline keyboard.
[Function documentation source](https://core.telegram.org/bots/api#editmessagemedia)
"""),
(:editMessageLiveLocation, """
editMessageLiveLocation([tg::TelegramClient]; kwargs...)
Use this method to edit live location messages. A location can be edited until its live_period expires or editing is explicitly disabled by a call to [`stopMessageLiveLocation`](@ref). On success, if the edited message is not an inline message, the edited [Message](https://core.telegram.org/bots/api#message) is returned, otherwise True is returned.
# Required arguments
- `latitude`: (Float number) Latitude of new location
- `longitude`: (Float number) Longitude of new location
# Optional arguments
- `chat_id`: (Integer or String) Required if inline_message_id is not specified. Unique identifier for the target chat or username of the target channel (in the format `@channelusername`)
- `message_id`: (Integer) Required if inline_message_id is not specified. Identifier of the message to edit
- `inline_message_id`: (String) Required if chat_id and message_id are not specified. Identifier of the inline message
- `horizontal_accuracy`: (Float number) The radius of uncertainty for the location, measured in meters; 0-1500
- `heading`: (Integer) Direction in which the user is moving, in degrees. Must be between 1 and 360 if specified.
- `proximity_alert_radius`: (Integer) The maximum distance for proximity alerts about approaching another chat member, in meters. Must be between 1 and 100000 if specified.
- `reply_markup`: (InlineKeyboardMarkup) A JSON-serialized object for a new inline keyboard.
[Function documentation source](https://core.telegram.org/bots/api#editmessagelivelocation)
"""),
(:stopMessageLiveLocation, """
stopMessageLiveLocation([tg::TelegramClient]; kwargs...)
Use this method to stop updating a live location message before live_period expires. On success, if the message is not an inline message, the edited [Message](https://core.telegram.org/bots/api#message) is returned, otherwise True is returned.
# Optional arguments
- `chat_id`: (Integer or String) Required if inline_message_id is not specified. Unique identifier for the target chat or username of the target channel (in the format `@channelusername`)
- `message_id`: (Integer) Required if inline_message_id is not specified. Identifier of the message with live location to stop
- `inline_message_id`: (String) Required if chat_id and message_id are not specified. Identifier of the inline message
- `reply_markup`: (InlineKeyboardMarkup) A JSON-serialized object for a new inline keyboard.
[Function documentation source](https://core.telegram.org/bots/api#stopmessagelivelocation)
"""),
(:editMessageReplyMarkup, """
editMessageReplyMarkup([tg::TelegramClient]; kwargs...)
Use this method to edit only the reply markup of messages. On success, if the edited message is not an inline message, the edited [Message](https://core.telegram.org/bots/api#message) is returned, otherwise True is returned.
# Optional arguments
- `chat_id`: (Integer or String) Required if inline_message_id is not specified. Unique identifier for the target chat or username of the target channel (in the format `@channelusername`)
- `message_id`: (Integer) Required if inline_message_id is not specified. Identifier of the message to edit
- `inline_message_id`: (String) Required if chat_id and message_id are not specified. Identifier of the inline message
- `reply_markup`: (InlineKeyboardMarkup) A JSON-serialized object for an inline keyboard.
[Function documentation source](https://core.telegram.org/bots/api#editmessagereplymarkup)
"""),
(:stopPoll, """
stopPoll([tg::TelegramClient]; kwargs...)
Use this method to stop a poll which was sent by the bot. On success, the stopped [Poll](https://core.telegram.org/bots/api#poll) is returned.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target channel (in the format `@channelusername`)
- `message_id`: (Integer) Identifier of the original message with the poll
# Optional arguments
- `reply_markup`: (InlineKeyboardMarkup) A JSON-serialized object for a new message inline keyboard.
[Function documentation source](https://core.telegram.org/bots/api#stoppoll)
"""),
(:deleteMessage, """
deleteMessage([tg::TelegramClient]; kwargs...)
Use this method to delete a message, including service messages, with the following limitations:- A message can only be deleted if it was sent less than 48 hours ago.- Service messages about a supergroup, channel, or forum topic creation can't be deleted.- A dice message in a private chat can only be deleted if it was sent more than 24 hours ago.- Bots can delete outgoing messages in private chats, groups, and supergroups.- Bots can delete incoming messages in private chats.- Bots granted can_post_messages permissions can delete outgoing messages in channels.- If the bot is an administrator of a group, it can delete any message there.- If the bot has can_delete_messages permission in a supergroup or a channel, it can delete any message there.Returns True on success.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target channel (in the format `@channelusername`)
- `message_id`: (Integer) Identifier of the message to delete
[Function documentation source](https://core.telegram.org/bots/api#deletemessage)
"""),
(:sendSticker, """
sendSticker([tg::TelegramClient]; kwargs...)
Use this method to send static .WEBP, animated .TGS, or video .WEBM stickers. On success, the sent [Message](https://core.telegram.org/bots/api#message) is returned.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target channel (in the format `@channelusername`)
- `sticker`: (InputFile or String) Sticker to send. Pass a file_id as String to send a file that exists on the Telegram servers (recommended), pass an HTTP URL as a String for Telegram to get a .WEBP sticker from the Internet, or upload a new .WEBP or .TGS sticker using multipart/form-data. [More information on Sending Files »](https://core.telegram.org/bots/api#sending-files). Video stickers can only be sent by a file_id. Animated stickers can't be sent via an HTTP URL.
# Optional arguments
- `message_thread_id`: (Integer) Unique identifier for the target message thread (topic) of the forum; for forum supergroups only
- `emoji`: (String) Emoji associated with the sticker; only for just uploaded stickers
- `disable_notification`: (Boolean) Sends the message silently. Users will receive a notification with no sound.
- `protect_content`: (Boolean) Protects the contents of the sent message from forwarding and saving
- `reply_to_message_id`: (Integer) If the message is a reply, ID of the original message
- `allow_sending_without_reply`: (Boolean) Pass True if the message should be sent even if the specified replied-to message is not found
- `reply_markup`: (InlineKeyboardMarkup or ReplyKeyboardMarkup or ReplyKeyboardRemove or ForceReply) Additional interface options. A JSON-serialized object for an inline keyboard, custom reply keyboard, instructions to remove reply keyboard or to force a reply from the user.
[Function documentation source](https://core.telegram.org/bots/api#sendsticker)
"""),
(:getStickerSet, """
getStickerSet([tg::TelegramClient]; kwargs...)
Use this method to get a sticker set. On success, a [StickerSet](https://core.telegram.org/bots/api#stickerset) object is returned.
# Required arguments
- `name`: (String) Name of the sticker set
[Function documentation source](https://core.telegram.org/bots/api#getstickerset)
"""),
(:getCustomEmojiStickers, """
getCustomEmojiStickers([tg::TelegramClient]; kwargs...)
Use this method to get information about custom emoji stickers by their identifiers. Returns an Array of [Sticker](https://core.telegram.org/bots/api#sticker) objects.
# Required arguments
- `custom_emoji_ids`: (Array of String) List of custom emoji identifiers. At most 200 custom emoji identifiers can be specified.
[Function documentation source](https://core.telegram.org/bots/api#getcustomemojistickers)
"""),
(:uploadStickerFile, """
uploadStickerFile([tg::TelegramClient]; kwargs...)
Use this method to upload a file with a sticker for later use in the [`createNewStickerSet`](@ref) and [`addStickerToSet`](@ref) methods (the file can be used multiple times). Returns the uploaded [File](https://core.telegram.org/bots/api#file) on success.
# Required arguments
- `user_id`: (Integer) User identifier of sticker file owner
- `sticker`: (InputFile) A file with the sticker in .WEBP, .PNG, .TGS, or .WEBM format. See https://core.telegram.org/stickers for technical requirements. [More information on Sending Files »](https://core.telegram.org/bots/api#sending-files)
- `sticker_format`: (String) Format of the sticker, must be one of “static”, “animated”, “video”
[Function documentation source](https://core.telegram.org/bots/api#uploadstickerfile)
"""),
(:createNewStickerSet, """
createNewStickerSet([tg::TelegramClient]; kwargs...)
Use this method to create a new sticker set owned by a user. The bot will be able to edit the sticker set thus created. Returns True on success.
# Required arguments
- `user_id`: (Integer) User identifier of created sticker set owner
- `name`: (String) Short name of sticker set, to be used in `t.me/addstickers/` URLs (e.g., animals). Can contain only English letters, digits and underscores. Must begin with a letter, can't contain consecutive underscores and must end in `"_by_<bot_username>"`. `<bot_username>` is case insensitive. 1-64 characters.
- `title`: (String) Sticker set title, 1-64 characters
- `stickers`: (Array of InputSticker) A JSON-serialized list of 1-50 initial stickers to be added to the sticker set
- `sticker_format`: (String) Format of stickers in the set, must be one of “static”, “animated”, “video”
# Optional arguments
- `sticker_type`: (String) Type of stickers in the set, pass “regular”, “mask”, or “custom_emoji”. By default, a regular sticker set is created.
- `needs_repainting`: (Boolean) Pass True if stickers in the sticker set must be repainted to the color of text when used in messages, the accent color if used as emoji status, white on chat photos, or another appropriate color based on context; for custom emoji sticker sets only
[Function documentation source](https://core.telegram.org/bots/api#createnewstickerset)
"""),
(:addStickerToSet, """
addStickerToSet([tg::TelegramClient]; kwargs...)
Use this method to add a new sticker to a set created by the bot. The format of the added sticker must match the format of the other stickers in the set. Emoji sticker sets can have up to 200 stickers. Animated and video sticker sets can have up to 50 stickers. Static sticker sets can have up to 120 stickers. Returns True on success.
# Required arguments
- `user_id`: (Integer) User identifier of sticker set owner
- `name`: (String) Sticker set name
- `sticker`: (InputSticker) A JSON-serialized object with information about the added sticker. If exactly the same sticker had already been added to the set, then the set isn't changed.
[Function documentation source](https://core.telegram.org/bots/api#addstickertoset)
"""),
(:setStickerPositionInSet, """
setStickerPositionInSet([tg::TelegramClient]; kwargs...)
Use this method to move a sticker in a set created by the bot to a specific position. Returns True on success.
# Required arguments
- `sticker`: (String) File identifier of the sticker
- `position`: (Integer) New sticker position in the set, zero-based
[Function documentation source](https://core.telegram.org/bots/api#setstickerpositioninset)
"""),
(:deleteStickerFromSet, """
deleteStickerFromSet([tg::TelegramClient]; kwargs...)
Use this method to delete a sticker from a set created by the bot. Returns True on success.
# Required arguments
- `sticker`: (String) File identifier of the sticker
[Function documentation source](https://core.telegram.org/bots/api#deletestickerfromset)
"""),
(:setStickerEmojiList, """
setStickerEmojiList([tg::TelegramClient]; kwargs...)
Use this method to change the list of emoji assigned to a regular or custom emoji sticker. The sticker must belong to a sticker set created by the bot. Returns True on success.
# Required arguments
- `sticker`: (String) File identifier of the sticker
- `emoji_list`: (Array of String) A JSON-serialized list of 1-20 emoji associated with the sticker
[Function documentation source](https://core.telegram.org/bots/api#setstickeremojilist)
"""),
(:setStickerKeywords, """
setStickerKeywords([tg::TelegramClient]; kwargs...)
Use this method to change search keywords assigned to a regular or custom emoji sticker. The sticker must belong to a sticker set created by the bot. Returns True on success.
# Required arguments
- `sticker`: (String) File identifier of the sticker
# Optional arguments
- `keywords`: (Array of String) A JSON-serialized list of 0-20 search keywords for the sticker with total length of up to 64 characters
[Function documentation source](https://core.telegram.org/bots/api#setstickerkeywords)
"""),
(:setStickerMaskPosition, """
setStickerMaskPosition([tg::TelegramClient]; kwargs...)
Use this method to change the [mask position](https://core.telegram.org/bots/api#maskposition) of a mask sticker. The sticker must belong to a sticker set that was created by the bot. Returns True on success.
# Required arguments
- `sticker`: (String) File identifier of the sticker
# Optional arguments
- `mask_position`: (MaskPosition) A JSON-serialized object with the position where the mask should be placed on faces. Omit the parameter to remove the mask position.
[Function documentation source](https://core.telegram.org/bots/api#setstickermaskposition)
"""),
(:setStickerSetTitle, """
setStickerSetTitle([tg::TelegramClient]; kwargs...)
Use this method to set the title of a created sticker set. Returns True on success.
# Required arguments
- `name`: (String) Sticker set name
- `title`: (String) Sticker set title, 1-64 characters
[Function documentation source](https://core.telegram.org/bots/api#setstickersettitle)
"""),
(:setStickerSetThumbnail, """
setStickerSetThumbnail([tg::TelegramClient]; kwargs...)
Use this method to set the thumbnail of a regular or mask sticker set. The format of the thumbnail file must match the format of the stickers in the set. Returns True on success.
# Required arguments
- `name`: (String) Sticker set name
- `user_id`: (Integer) User identifier of the sticker set owner
# Optional arguments
- `thumbnail`: (InputFile or String) A .WEBP or .PNG image with the thumbnail, must be up to 128 kilobytes in size and have a width and height of exactly 100px, or a .TGS animation with a thumbnail up to 32 kilobytes in size (see https://core.telegram.org/stickers#animated-sticker-requirements for animated sticker technical requirements), or a WEBM video with the thumbnail up to 32 kilobytes in size; see https://core.telegram.org/stickers#video-sticker-requirements for video sticker technical requirements. Pass a file_id as a String to send a file that already exists on the Telegram servers, pass an HTTP URL as a String for Telegram to get a file from the Internet, or upload a new one using multipart/form-data. [More information on Sending Files »](https://core.telegram.org/bots/api#sending-files). Animated and video sticker set thumbnails can't be uploaded via HTTP URL. If omitted, then the thumbnail is dropped and the first sticker is used as the thumbnail.
[Function documentation source](https://core.telegram.org/bots/api#setstickersetthumbnail)
"""),
(:setCustomEmojiStickerSetThumbnail, """
setCustomEmojiStickerSetThumbnail([tg::TelegramClient]; kwargs...)
Use this method to set the thumbnail of a custom emoji sticker set. Returns True on success.
# Required arguments
- `name`: (String) Sticker set name
# Optional arguments
- `custom_emoji_id`: (String) Custom emoji identifier of a sticker from the sticker set; pass an empty string to drop the thumbnail and use the first sticker as the thumbnail.
[Function documentation source](https://core.telegram.org/bots/api#setcustomemojistickersetthumbnail)
"""),
(:deleteStickerSet, """
deleteStickerSet([tg::TelegramClient]; kwargs...)
Use this method to delete a sticker set that was created by the bot. Returns True on success.
# Required arguments
- `name`: (String) Sticker set name
[Function documentation source](https://core.telegram.org/bots/api#deletestickerset)
"""),
(:answerInlineQuery, """
answerInlineQuery([tg::TelegramClient]; kwargs...)
Use this method to send answers to an inline query. On success, True is returned.No more than 50 results per query are allowed.
# Required arguments
- `inline_query_id`: (String) Unique identifier for the answered query
- `results`: (Array of InlineQueryResult) A JSON-serialized array of results for the inline query
# Optional arguments
- `cache_time`: (Integer) The maximum amount of time in seconds that the result of the inline query may be cached on the server. Defaults to 300.
- `is_personal`: (Boolean) Pass True if results may be cached on the server side only for the user that sent the query. By default, results may be returned to any user who sends the same query.
- `next_offset`: (String) Pass the offset that a client should send in the next query with the same text to receive more results. Pass an empty string if there are no more results or if you don't support pagination. Offset length can't exceed 64 bytes.
- `button`: (InlineQueryResultsButton) A JSON-serialized object describing a button to be shown above inline query results
[Function documentation source](https://core.telegram.org/bots/api#answerinlinequery)
"""),
(:answerWebAppQuery, """
answerWebAppQuery([tg::TelegramClient]; kwargs...)
Use this method to set the result of an interaction with a Web App and send a corresponding message on behalf of the user to the chat from which the query originated. On success, a [SentWebAppMessage](https://core.telegram.org/bots/api#sentwebappmessage) object is returned.
# Required arguments
- `web_app_query_id`: (String) Unique identifier for the query to be answered
- `result`: (InlineQueryResult) A JSON-serialized object describing the message to be sent
[Function documentation source](https://core.telegram.org/bots/api#answerwebappquery)
"""),
(:sendInvoice, """
sendInvoice([tg::TelegramClient]; kwargs...)
Use this method to send invoices. On success, the sent [Message](https://core.telegram.org/bots/api#message) is returned.
# Required arguments
- `chat_id`: (Integer or String) Unique identifier for the target chat or username of the target channel (in the format `@channelusername`)
- `title`: (String) Product name, 1-32 characters
- `description`: (String) Product description, 1-255 characters
- `payload`: (String) Bot-defined invoice payload, 1-128 bytes. This will not be displayed to the user, use for your internal processes.
- `provider_token`: (String) Payment provider token, obtained via @BotFather
- `currency`: (String) Three-letter ISO 4217 currency code, see more on currencies
- `prices`: (Array of LabeledPrice) Price breakdown, a JSON-serialized list of components (e.g. product price, tax, discount, delivery cost, delivery tax, bonus, etc.)
# Optional arguments
- `message_thread_id`: (Integer) Unique identifier for the target message thread (topic) of the forum; for forum supergroups only
- `max_tip_amount`: (Integer) The maximum accepted amount for tips in the smallest units of the currency (integer, not float/double). For example, for a maximum tip of `US\$ 1.45` pass `max_tip_amount = 145`. See the exp parameter in currencies.json, it shows the number of digits past the decimal point for each currency (2 for the majority of currencies). Defaults to 0
- `suggested_tip_amounts`: (Array of Integer) A JSON-serialized array of suggested amounts of tips in the smallest units of the currency (integer, not float/double). At most 4 suggested tip amounts can be specified. The suggested tip amounts must be positive, passed in a strictly increased order and must not exceed max_tip_amount.
- `start_parameter`: (String) Unique deep-linking parameter. If left empty, forwarded copies of the sent message will have a Pay button, allowing multiple users to pay directly from the forwarded message, using the same invoice. If non-empty, forwarded copies of the sent message will have a URL button with a deep link to the bot (instead of a Pay button), with the value used as the start parameter
- `provider_data`: (String) JSON-serialized data about the invoice, which will be shared with the payment provider. A detailed description of required fields should be provided by the payment provider.
- `photo_url`: (String) URL of the product photo for the invoice. Can be a photo of the goods or a marketing image for a service. People like it better when they see what they are paying for.
- `photo_size`: (Integer) Photo size in bytes
- `photo_width`: (Integer) Photo width
- `photo_height`: (Integer) Photo height
- `need_name`: (Boolean) Pass True if you require the user's full name to complete the order
- `need_phone_number`: (Boolean) Pass True if you require the user's phone number to complete the order
- `need_email`: (Boolean) Pass True if you require the user's email address to complete the order
- `need_shipping_address`: (Boolean) Pass True if you require the user's shipping address to complete the order
- `send_phone_number_to_provider`: (Boolean) Pass True if the user's phone number should be sent to provider
- `send_email_to_provider`: (Boolean) Pass True if the user's email address should be sent to provider
- `is_flexible`: (Boolean) Pass True if the final price depends on the shipping method
- `disable_notification`: (Boolean) Sends the message silently. Users will receive a notification with no sound.
- `protect_content`: (Boolean) Protects the contents of the sent message from forwarding and saving
- `reply_to_message_id`: (Integer) If the message is a reply, ID of the original message
- `allow_sending_without_reply`: (Boolean) Pass True if the message should be sent even if the specified replied-to message is not found
- `reply_markup`: (InlineKeyboardMarkup) A JSON-serialized object for an inline keyboard. If empty, one 'Pay `total price`' button will be shown. If not empty, the first button must be a Pay button.
[Function documentation source](https://core.telegram.org/bots/api#sendinvoice)
"""),
(:createInvoiceLink, """
createInvoiceLink([tg::TelegramClient]; kwargs...)
Use this method to create a link for an invoice. Returns the created invoice link as String on success.
# Required arguments
- `title`: (String) Product name, 1-32 characters
- `description`: (String) Product description, 1-255 characters
- `payload`: (String) Bot-defined invoice payload, 1-128 bytes. This will not be displayed to the user, use for your internal processes.
- `provider_token`: (String) Payment provider token, obtained via BotFather
- `currency`: (String) Three-letter ISO 4217 currency code, see more on currencies
- `prices`: (Array of LabeledPrice) Price breakdown, a JSON-serialized list of components (e.g. product price, tax, discount, delivery cost, delivery tax, bonus, etc.)
# Optional arguments
- `max_tip_amount`: (Integer) The maximum accepted amount for tips in the smallest units of the currency (integer, not float/double). For example, for a maximum tip of `US\$ 1.45` pass `max_tip_amount = 145`. See the exp parameter in currencies.json, it shows the number of digits past the decimal point for each currency (2 for the majority of currencies). Defaults to 0
- `suggested_tip_amounts`: (Array of Integer) A JSON-serialized array of suggested amounts of tips in the smallest units of the currency (integer, not float/double). At most 4 suggested tip amounts can be specified. The suggested tip amounts must be positive, passed in a strictly increased order and must not exceed max_tip_amount.
- `provider_data`: (String) JSON-serialized data about the invoice, which will be shared with the payment provider. A detailed description of required fields should be provided by the payment provider.
- `photo_url`: (String) URL of the product photo for the invoice. Can be a photo of the goods or a marketing image for a service.
- `photo_size`: (Integer) Photo size in bytes
- `photo_width`: (Integer) Photo width
- `photo_height`: (Integer) Photo height
- `need_name`: (Boolean) Pass True if you require the user's full name to complete the order
- `need_phone_number`: (Boolean) Pass True if you require the user's phone number to complete the order
- `need_email`: (Boolean) Pass True if you require the user's email address to complete the order
- `need_shipping_address`: (Boolean) Pass True if you require the user's shipping address to complete the order
- `send_phone_number_to_provider`: (Boolean) Pass True if the user's phone number should be sent to the provider
- `send_email_to_provider`: (Boolean) Pass True if the user's email address should be sent to the provider
- `is_flexible`: (Boolean) Pass True if the final price depends on the shipping method
[Function documentation source](https://core.telegram.org/bots/api#createinvoicelink)
"""),
(:answerShippingQuery, """
answerShippingQuery([tg::TelegramClient]; kwargs...)
If you sent an invoice requesting a shipping address and the parameter is_flexible was specified, the Bot API will send an [Update](https://core.telegram.org/bots/api#update) with a shipping_query field to the bot. Use this method to reply to shipping queries. On success, True is returned.
# Required arguments
- `shipping_query_id`: (String) Unique identifier for the query to be answered
- `ok`: (Boolean) Pass True if delivery to the specified address is possible and False if there are any problems (for example, if delivery to the specified address is not possible)
# Optional arguments
- `shipping_options`: (Array of ShippingOption) Required if ok is True. A JSON-serialized array of available shipping options.
- `error_message`: (String) Required if ok is False. Error message in human readable form that explains why it is impossible to complete the order (e.g. "Sorry, delivery to your desired address is unavailable'). Telegram will display this message to the user.
[Function documentation source](https://core.telegram.org/bots/api#answershippingquery)
"""),
(:answerPreCheckoutQuery, """
answerPreCheckoutQuery([tg::TelegramClient]; kwargs...)
Once the user has confirmed their payment and shipping details, the Bot API sends the final confirmation in the form of an [Update](https://core.telegram.org/bots/api#update) with the field pre_checkout_query. Use this method to respond to such pre-checkout queries. On success, True is returned. Note: The Bot API must receive an answer within 10 seconds after the pre-checkout query was sent.
# Required arguments
- `pre_checkout_query_id`: (String) Unique identifier for the query to be answered
- `ok`: (Boolean) Specify True if everything is alright (goods are available, etc.) and the bot is ready to proceed with the order. Use False if there are any problems.
# Optional arguments
- `error_message`: (String) Required if ok is False. Error message in human readable form that explains the reason for failure to proceed with the checkout (e.g. "Sorry, somebody just bought the last of our amazing black T-shirts while you were busy filling out your payment details. Please choose a different color or garment!"). Telegram will display this message to the user.
[Function documentation source](https://core.telegram.org/bots/api#answerprecheckoutquery)
"""),
(:setPassportDataErrors, """
setPassportDataErrors([tg::TelegramClient]; kwargs...)
Informs a user that some of the Telegram Passport elements they provided contains errors. The user will not be able to re-submit their Passport to you until the errors are fixed (the contents of the field for which you returned the error must change). Returns True on success.
Use this if the data submitted by the user doesn't satisfy the standards your service requires for any reason. For example, if a birthday date seems invalid, a submitted document is blurry, a scan shows evidence of tampering, etc. Supply some details in the error message to make sure the user knows how to correct the issues.
# Required arguments
- `user_id`: (Integer) User identifier
- `errors`: (Array of PassportElementError) A JSON-serialized array describing the errors
[Function documentation source](https://core.telegram.org/bots/api#setpassportdataerrors)
"""),
(:sendGame, """
sendGame([tg::TelegramClient]; kwargs...)
Use this method to send a game. On success, the sent [Message](https://core.telegram.org/bots/api#message) is returned.
# Required arguments
- `chat_id`: (Integer) Unique identifier for the target chat
- `game_short_name`: (String) Short name of the game, serves as the unique identifier for the game. Set up your games via @BotFather.
# Optional arguments
- `message_thread_id`: (Integer) Unique identifier for the target message thread (topic) of the forum; for forum supergroups only
- `disable_notification`: (Boolean) Sends the message silently. Users will receive a notification with no sound.
- `protect_content`: (Boolean) Protects the contents of the sent message from forwarding and saving
- `reply_to_message_id`: (Integer) If the message is a reply, ID of the original message
- `allow_sending_without_reply`: (Boolean) Pass True if the message should be sent even if the specified replied-to message is not found
- `reply_markup`: (InlineKeyboardMarkup) A JSON-serialized object for an inline keyboard. If empty, one 'Play game_title' button will be shown. If not empty, the first button must launch the game.
[Function documentation source](https://core.telegram.org/bots/api#sendgame)
"""),
(:setGameScore, """
setGameScore([tg::TelegramClient]; kwargs...)
Use this method to set the score of the specified user in a game message. On success, if the message is not an inline message, the [Message](https://core.telegram.org/bots/api#message) is returned, otherwise True is returned. Returns an error, if the new score is not greater than the user's current score in the chat and force is False.
# Required arguments
- `user_id`: (Integer) User identifier
- `score`: (Integer) New score, must be non-negative
# Optional arguments
- `force`: (Boolean) Pass True if the high score is allowed to decrease. This can be useful when fixing mistakes or banning cheaters
- `disable_edit_message`: (Boolean) Pass True if the game message should not be automatically edited to include the current scoreboard
- `chat_id`: (Integer) Required if inline_message_id is not specified. Unique identifier for the target chat
- `message_id`: (Integer) Required if inline_message_id is not specified. Identifier of the sent message
- `inline_message_id`: (String) Required if chat_id and message_id are not specified. Identifier of the inline message
[Function documentation source](https://core.telegram.org/bots/api#setgamescore)
"""),
(:getGameHighScores, """
getGameHighScores([tg::TelegramClient]; kwargs...)
Use this method to get data for high score tables. Will return the score of the specified user and several of their neighbors in a game. Returns an Array of [GameHighScore](https://core.telegram.org/bots/api#gamehighscore) objects.
This method will currently return scores for the target user, plus two of their closest neighbors on each side. Will also return the top three users if the user and their neighbors are not among them. Please note that this behavior is subject to change.
# Required arguments
- `user_id`: (Integer) Target user id
# Optional arguments
- `chat_id`: (Integer) Required if inline_message_id is not specified. Unique identifier for the target chat
- `message_id`: (Integer) Required if inline_message_id is not specified. Identifier of the sent message
- `inline_message_id`: (String) Required if chat_id and message_id are not specified. Identifier of the inline message
[Function documentation source](https://core.telegram.org/bots/api#getgamehighscores)
"""),
]
| Telegram | https://github.com/Arkoniak/Telegram.jl.git |
|
[
"MIT"
]
| 1.1.5 | 4ac524cb90051721afa82c8a6c999df35dafbecd | code | 758 | module TestTelegram
using Test
for file in sort([file for file in readdir(@__DIR__) if
occursin(r"^test[_0-9]+.*\.jl$", file)])
m = match(r"test([0-9]+)_(.*).jl", file)
filename = String(m[2])
testnum = string(parse(Int, m[1]))
# with this test one can run only specific tests, for example
# Pkg.test("Telegram", test_args = ["xxx"])
# or
# Pkg.test("Telegram", test_args = ["1"])
if isempty(ARGS) || (filename in ARGS) || (testnum in ARGS) || (m[1] in ARGS)
@testset "$filename" begin
# Here you can optionally exclude some test files
# VERSION < v"1.1" && file == "test_xxx.jl" && continue
include(file)
end
end
end
end # module
| Telegram | https://github.com/Arkoniak/Telegram.jl.git |
|
[
"MIT"
]
| 1.1.5 | 4ac524cb90051721afa82c8a6c999df35dafbecd | code | 228 | module TestBasic
using Telegram
using Telegram.API
using Test
@testset "basic api call" begin
tg = TelegramClient("xxx"; chat_id = "yyy")
useglobally!(tg)
@test Telegram.DEFAULT_OPTS.client === tg
end
end # module
| Telegram | https://github.com/Arkoniak/Telegram.jl.git |
|
[
"MIT"
]
| 1.1.5 | 4ac524cb90051721afa82c8a6c999df35dafbecd | docs | 4704 | # Telegram
| **Documentation** | **Build Status** |
|:-------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------:|:------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------:|
| [](https://Arkoniak.github.io/Telegram.jl/stable)[](https://Arkoniak.github.io/Telegram.jl/dev) | [](https://github.com/Arkoniak/Telegram.jl/actions)[](https://codecov.io/gh/Arkoniak/Telegram.jl) |
Simple [Telegram Messaging](https://telegram.org/) SDK with logging and bot facilities. Package was built with first-class support of telegram as instant message backend for various notification and reporing systems. So, simpliest way to use this package is by doing something like this
```julia
using Telegram, Telegram.API
tg = TelegramClient("YOUR TOKEN", chat_id = "YOUR CHAT_ID")
# Some lengthy calculation
# ...
sendMessage(text = "Calculation complete, result is $result")
```
Please refer to [documentation](https://Arkoniak.github.io/Telegram.jl/dev) to learn how to properly setup telegram credentials and use package in general.
# Installation
Package is registered so you can install it in a usual way
```julia
julia> using Pkg
julia> Pkg.add("Telegram")
```
# Usage
## Telegram Bot API
Usage is straightforward, [Telegram Bot API methods](https://core.telegram.org/bots/api#available-methods) are in one to one correspondence with this Julia wrapper. You need to create connection and then simply call necessary methods
```julia
julia> using Telegram, Telegram.API
julia> token = "YOUR TELEGRAM BOT TOKEN"
julia> TelegramClient(token)
julia> getMe()
JSON3.Object{Array{UInt8,1},SubArray{UInt64,1,Array{UInt64,1},Tuple{UnitRange{Int64}},true}} with 7 entries:
:id => 123456789
:is_bot => true
:first_name => "Awesome Bot"
:username => "AwesomeBot"
:can_join_groups => true
:can_read_all_group_messages => false
:supports_inline_queries => false
```
Mainly you need to set arguments, but `chat_id` can be set directly in `TelegramClient`
```julia
julia> token = "YOUR TELEGRAM BOT TOKEN"
julia> TelegramClient(token; chat_id = "YOUR TELEGRAM BOT CHAT_ID")
julia> sendMessage(text = "Hello, world!")
```
You can send files and other `IO` objects
```julia
julia> sendPhoto(photo = open("picture.jpg", "r"))
julia> io = IOBuffer()
julia> print(io, "Hello world!")
julia> sendDocument(document = "hello.txt" => io)
```
## Logging
You can use [Telegram.jl](https://github.com/Arkoniak/Telegram.jl) together with [LoggingExtras.jl](https://github.com/oxinabox/LoggingExtras.jl) to create powerful logging with insta messaging in case of critical situations
Put your credentials in `.env`
```
# .env
TELEGRAM_BOT_TOKEN = <YOUR TELEGRAM BOT TOKEN>
TELEGRAM_BOT_CHAT_ID = <YOUR TELEGRAM CHAT ID>
```
```julia
using Telegram
using Logging, LoggingExtras
using ConfigEnv
dotenv() # populate ENV with the data from .env
tg = TelegramClient()
tg_logger = TelegramLogger(tg; async = false)
demux_logger = TeeLogger(
MinLevelLogger(tg_logger, Logging.Error),
ConsoleLogger()
)
global_logger(demux_logger)
@warn "It is bad" # goes to console
@info "normal stuff" # goes to console
@error "THE WORSE THING" # goes to console and telegram
@debug "it is chill" # goes to console
```
## Bots
You can create bot with the `run_bot` command. Here is for example Echo bot
```
# .env
TELEGRAM_BOT_TOKEN = <YOUR TELEGRAM BOT TOKEN>
```
```julia
using Telegram, Telegram.API
using ConfigEnv
dotenv()
# Echo bot
run_bot() do msg
sendMessage(text = msg.message.text, chat_id = msg.message.chat.id)
end
```
| Telegram | https://github.com/Arkoniak/Telegram.jl.git |
|
[
"MIT"
]
| 1.1.5 | 4ac524cb90051721afa82c8a6c999df35dafbecd | docs | 897 | # Developer guide
Please note, that bot api functions themselves are not written manually, but automatically generated by parsing [https://core.telegram.org/bots/api](https://core.telegram.org/bots/api) site. So, if you find any inconsistences, missing docstrings or missing methods please do not make changes to `src/telegram_api.jl` or `reference.md`. Instead you should change scraping script accordingly. This script can be found in `extras` directory and in order to build new docs and methods you should do the following
```sh
sh> cd extras
sh> julia
julia> ]
pkg> activate .
(extras)> instantiate
```
After that you can exit julia session and run
```sh
sh> julia --project=. make.jl
```
command. It will create two files:
* `src/telegram_api.jl` which contains all methods names and corresponding docstrings
* `docs/src/reference.md` which contains complete [API Reference](@ref) page.
| Telegram | https://github.com/Arkoniak/Telegram.jl.git |
|
[
"MIT"
]
| 1.1.5 | 4ac524cb90051721afa82c8a6c999df35dafbecd | docs | 1267 | ```@meta
CurrentModule = Telegram
```
# Telegram
Simple [Telegram Messaging](https://telegram.org/) SDK with logging and bot facilities. Package was built with first-class support of telegram as instant message backend for various notification and reporing systems. So, simpliest way to use this package is by doing something like this
Put your credentials in `.env` file
```
# .env
TELEGRAM_BOT_TOKEN = <YOUR TELEGRAM BOT TOKEN>
TELEGRAM_BOT_CHAT_ID = <YOUR TELEGRAM CHAT ID>
```
```julia
using Telegram, Telegram.API
using ConfigEnv
dotenv()
# Some lengthy calculation
# ...
sendMessage(text = "Calculation complete, result is $result")
```
Of course you can manually provide secrets with the `TelegramClient` constructor
```julia
tg = TelegramClient("your token"; chat_id = "your default chat_id")
sendMessage(text = "Calculation complete")
```
or even
```julia
sendMessage(tg; text = "Calculation complete")
```
## Installation
Package is registered so you can install it in a usual way
```julia
julia> using Pkg
julia> Pkg.add("Telegram")
```
## General methods
In addition to [API Reference](@ref) methods, there is a number of methods which add some julian functionality like bots and logging facilities.
```@autodocs
Modules = [Telegram]
```
| Telegram | https://github.com/Arkoniak/Telegram.jl.git |
|
[
"MIT"
]
| 1.1.5 | 4ac524cb90051721afa82c8a6c999df35dafbecd | docs | 9608 | ```@meta
CurrentModule = Telegram
```
Word of caution: this documentation is generated automatically from [https://core.telegram.org/bots/api](https://core.telegram.org/bots/api) and can be incomplete or wrongly formatted. Also this documentation do not contain information about general principles of the Telegram API and response objects. So, if you have any doubts, consult original [api documentation](https://core.telegram.org/bots/api) and consider it as a ground truth. These docs were generated only for simpler navigation and better help hints in REPL and editors.
Please notice that this package implements the [Bot API](https://core.telegram.org/api#bot-api). The Telegram Bot API is an API specifically for bots, which is simpler but less customisable. It acts as an intermediary between bots and the [Telegram API](https://core.telegram.org/api#telegram-api) which allow you to build your own customized Telegram clients.
All API functions have [`TelegramClient`](@ref) as optional positional argument, which means that if it is not set explicitly, than global client is used, which is usually created during initial construction or by explicit call of [`useglobally!`](@ref) function.
All arguments usually have `String`/`Boolean`/`Integer` types which is in one to one correspondence with julian types. Special arguments like `document`, `photo` and the like, which are intended for file sending, can accept either `IOStream` argument as in `open("picture.png", "r")` or `Pair{String, IO}` in case of in-memory `IO` objects without names. Read [Usage](@ref) for additional info.
# API Reference
## Getting updates
* [`Telegram.getUpdates`](@ref)
* [`Telegram.setWebhook`](@ref)
* [`Telegram.deleteWebhook`](@ref)
* [`Telegram.getWebhookInfo`](@ref)
```@docs
getUpdates
```
```@docs
setWebhook
```
```@docs
deleteWebhook
```
```@docs
getWebhookInfo
```
## Available methods
* [`Telegram.getMe`](@ref)
* [`Telegram.logOut`](@ref)
* [`Telegram.close`](@ref)
* [`Telegram.sendMessage`](@ref)
* [`Telegram.forwardMessage`](@ref)
* [`Telegram.copyMessage`](@ref)
* [`Telegram.sendPhoto`](@ref)
* [`Telegram.sendAudio`](@ref)
* [`Telegram.sendDocument`](@ref)
* [`Telegram.sendVideo`](@ref)
* [`Telegram.sendAnimation`](@ref)
* [`Telegram.sendVoice`](@ref)
* [`Telegram.sendVideoNote`](@ref)
* [`Telegram.sendMediaGroup`](@ref)
* [`Telegram.sendLocation`](@ref)
* [`Telegram.sendVenue`](@ref)
* [`Telegram.sendContact`](@ref)
* [`Telegram.sendPoll`](@ref)
* [`Telegram.sendDice`](@ref)
* [`Telegram.sendChatAction`](@ref)
* [`Telegram.getUserProfilePhotos`](@ref)
* [`Telegram.getFile`](@ref)
* [`Telegram.banChatMember`](@ref)
* [`Telegram.unbanChatMember`](@ref)
* [`Telegram.restrictChatMember`](@ref)
* [`Telegram.promoteChatMember`](@ref)
* [`Telegram.setChatAdministratorCustomTitle`](@ref)
* [`Telegram.banChatSenderChat`](@ref)
* [`Telegram.unbanChatSenderChat`](@ref)
* [`Telegram.setChatPermissions`](@ref)
* [`Telegram.exportChatInviteLink`](@ref)
* [`Telegram.createChatInviteLink`](@ref)
* [`Telegram.editChatInviteLink`](@ref)
* [`Telegram.revokeChatInviteLink`](@ref)
* [`Telegram.approveChatJoinRequest`](@ref)
* [`Telegram.declineChatJoinRequest`](@ref)
* [`Telegram.setChatPhoto`](@ref)
* [`Telegram.deleteChatPhoto`](@ref)
* [`Telegram.setChatTitle`](@ref)
* [`Telegram.setChatDescription`](@ref)
* [`Telegram.pinChatMessage`](@ref)
* [`Telegram.unpinChatMessage`](@ref)
* [`Telegram.unpinAllChatMessages`](@ref)
* [`Telegram.leaveChat`](@ref)
* [`Telegram.getChat`](@ref)
* [`Telegram.getChatAdministrators`](@ref)
* [`Telegram.getChatMemberCount`](@ref)
* [`Telegram.getChatMember`](@ref)
* [`Telegram.setChatStickerSet`](@ref)
* [`Telegram.deleteChatStickerSet`](@ref)
* [`Telegram.getForumTopicIconStickers`](@ref)
* [`Telegram.createForumTopic`](@ref)
* [`Telegram.editForumTopic`](@ref)
* [`Telegram.closeForumTopic`](@ref)
* [`Telegram.reopenForumTopic`](@ref)
* [`Telegram.deleteForumTopic`](@ref)
* [`Telegram.unpinAllForumTopicMessages`](@ref)
* [`Telegram.editGeneralForumTopic`](@ref)
* [`Telegram.closeGeneralForumTopic`](@ref)
* [`Telegram.reopenGeneralForumTopic`](@ref)
* [`Telegram.hideGeneralForumTopic`](@ref)
* [`Telegram.unhideGeneralForumTopic`](@ref)
* [`Telegram.answerCallbackQuery`](@ref)
* [`Telegram.setMyCommands`](@ref)
* [`Telegram.deleteMyCommands`](@ref)
* [`Telegram.getMyCommands`](@ref)
* [`Telegram.setMyName`](@ref)
* [`Telegram.getMyName`](@ref)
* [`Telegram.setMyDescription`](@ref)
* [`Telegram.getMyDescription`](@ref)
* [`Telegram.setMyShortDescription`](@ref)
* [`Telegram.getMyShortDescription`](@ref)
* [`Telegram.setChatMenuButton`](@ref)
* [`Telegram.getChatMenuButton`](@ref)
* [`Telegram.setMyDefaultAdministratorRights`](@ref)
* [`Telegram.getMyDefaultAdministratorRights`](@ref)
```@docs
getMe
```
```@docs
logOut
```
```@docs
close
```
```@docs
sendMessage
```
```@docs
forwardMessage
```
```@docs
copyMessage
```
```@docs
sendPhoto
```
```@docs
sendAudio
```
```@docs
sendDocument
```
```@docs
sendVideo
```
```@docs
sendAnimation
```
```@docs
sendVoice
```
```@docs
sendVideoNote
```
```@docs
sendMediaGroup
```
```@docs
sendLocation
```
```@docs
sendVenue
```
```@docs
sendContact
```
```@docs
sendPoll
```
```@docs
sendDice
```
```@docs
sendChatAction
```
```@docs
getUserProfilePhotos
```
```@docs
getFile
```
```@docs
banChatMember
```
```@docs
unbanChatMember
```
```@docs
restrictChatMember
```
```@docs
promoteChatMember
```
```@docs
setChatAdministratorCustomTitle
```
```@docs
banChatSenderChat
```
```@docs
unbanChatSenderChat
```
```@docs
setChatPermissions
```
```@docs
exportChatInviteLink
```
```@docs
createChatInviteLink
```
```@docs
editChatInviteLink
```
```@docs
revokeChatInviteLink
```
```@docs
approveChatJoinRequest
```
```@docs
declineChatJoinRequest
```
```@docs
setChatPhoto
```
```@docs
deleteChatPhoto
```
```@docs
setChatTitle
```
```@docs
setChatDescription
```
```@docs
pinChatMessage
```
```@docs
unpinChatMessage
```
```@docs
unpinAllChatMessages
```
```@docs
leaveChat
```
```@docs
getChat
```
```@docs
getChatAdministrators
```
```@docs
getChatMemberCount
```
```@docs
getChatMember
```
```@docs
setChatStickerSet
```
```@docs
deleteChatStickerSet
```
```@docs
getForumTopicIconStickers
```
```@docs
createForumTopic
```
```@docs
editForumTopic
```
```@docs
closeForumTopic
```
```@docs
reopenForumTopic
```
```@docs
deleteForumTopic
```
```@docs
unpinAllForumTopicMessages
```
```@docs
editGeneralForumTopic
```
```@docs
closeGeneralForumTopic
```
```@docs
reopenGeneralForumTopic
```
```@docs
hideGeneralForumTopic
```
```@docs
unhideGeneralForumTopic
```
```@docs
answerCallbackQuery
```
```@docs
setMyCommands
```
```@docs
deleteMyCommands
```
```@docs
getMyCommands
```
```@docs
setMyName
```
```@docs
getMyName
```
```@docs
setMyDescription
```
```@docs
getMyDescription
```
```@docs
setMyShortDescription
```
```@docs
getMyShortDescription
```
```@docs
setChatMenuButton
```
```@docs
getChatMenuButton
```
```@docs
setMyDefaultAdministratorRights
```
```@docs
getMyDefaultAdministratorRights
```
## Updating messages
* [`Telegram.editMessageText`](@ref)
* [`Telegram.editMessageCaption`](@ref)
* [`Telegram.editMessageMedia`](@ref)
* [`Telegram.editMessageLiveLocation`](@ref)
* [`Telegram.stopMessageLiveLocation`](@ref)
* [`Telegram.editMessageReplyMarkup`](@ref)
* [`Telegram.stopPoll`](@ref)
* [`Telegram.deleteMessage`](@ref)
```@docs
editMessageText
```
```@docs
editMessageCaption
```
```@docs
editMessageMedia
```
```@docs
editMessageLiveLocation
```
```@docs
stopMessageLiveLocation
```
```@docs
editMessageReplyMarkup
```
```@docs
stopPoll
```
```@docs
deleteMessage
```
## Stickers
* [`Telegram.sendSticker`](@ref)
* [`Telegram.getStickerSet`](@ref)
* [`Telegram.getCustomEmojiStickers`](@ref)
* [`Telegram.uploadStickerFile`](@ref)
* [`Telegram.createNewStickerSet`](@ref)
* [`Telegram.addStickerToSet`](@ref)
* [`Telegram.setStickerPositionInSet`](@ref)
* [`Telegram.deleteStickerFromSet`](@ref)
* [`Telegram.setStickerEmojiList`](@ref)
* [`Telegram.setStickerKeywords`](@ref)
* [`Telegram.setStickerMaskPosition`](@ref)
* [`Telegram.setStickerSetTitle`](@ref)
* [`Telegram.setStickerSetThumbnail`](@ref)
* [`Telegram.setCustomEmojiStickerSetThumbnail`](@ref)
* [`Telegram.deleteStickerSet`](@ref)
```@docs
sendSticker
```
```@docs
getStickerSet
```
```@docs
getCustomEmojiStickers
```
```@docs
uploadStickerFile
```
```@docs
createNewStickerSet
```
```@docs
addStickerToSet
```
```@docs
setStickerPositionInSet
```
```@docs
deleteStickerFromSet
```
```@docs
setStickerEmojiList
```
```@docs
setStickerKeywords
```
```@docs
setStickerMaskPosition
```
```@docs
setStickerSetTitle
```
```@docs
setStickerSetThumbnail
```
```@docs
setCustomEmojiStickerSetThumbnail
```
```@docs
deleteStickerSet
```
## Inline mode
* [`Telegram.answerInlineQuery`](@ref)
* [`Telegram.answerWebAppQuery`](@ref)
```@docs
answerInlineQuery
```
```@docs
answerWebAppQuery
```
## Payments
* [`Telegram.sendInvoice`](@ref)
* [`Telegram.createInvoiceLink`](@ref)
* [`Telegram.answerShippingQuery`](@ref)
* [`Telegram.answerPreCheckoutQuery`](@ref)
```@docs
sendInvoice
```
```@docs
createInvoiceLink
```
```@docs
answerShippingQuery
```
```@docs
answerPreCheckoutQuery
```
## Telegram Passport
* [`Telegram.setPassportDataErrors`](@ref)
```@docs
setPassportDataErrors
```
## Games
* [`Telegram.sendGame`](@ref)
* [`Telegram.setGameScore`](@ref)
* [`Telegram.getGameHighScores`](@ref)
```@docs
sendGame
```
```@docs
setGameScore
```
```@docs
getGameHighScores
``` | Telegram | https://github.com/Arkoniak/Telegram.jl.git |
|
[
"MIT"
]
| 1.1.5 | 4ac524cb90051721afa82c8a6c999df35dafbecd | docs | 10914 | ```@meta
CurrentModule = Telegram
```
# Usage
## Setting up telegram token and chat\_id
In all examples of this section, it is assumed for simplicity that you set telegram token and chat\_id in `TELEGRAM_BOT_TOKEN` and `TELEGRAM_BOT_CHAT_ID` environment variables correspondingly. Recommended way to do it, by using [ConfigEnv.jl](https://github.com/Arkoniak/ConfigEnv.jl). You should create file `.env`
```
# .env
TELEGRAM_BOT_TOKEN = 123456:ababababababbabababababbababaab
TELEGRAM_BOT_CHAT_ID = 1234567
```
And at the beginning of the application, populate `ENV` with the `dotenv` function. `Telegram.jl` methods will use these variables automatically. Alternatively (but less secure) you can provide `token` and `chat_id` via `TelegramClient` constructor.
In order to get token itself, you should follow [this instruction](https://core.telegram.org/bots#3-how-do-i-create-a-bot). Just talk to `BotFather` and after few simple questions you will receive the token.
Easiest way to obtain chat\_id is through running simple print bot.
```julia
using Telegram
using ConfigEnv
dotenv()
run_bot() do msg
println(msg)
end
```
After running this script just open chat with your newly created bot and send it any message. You will receive something like this
```
{
"update_id": 87654321,
"message": {
"message_id": 6789,
"from": {
"id": 123456789,
"is_bot": false,
"language_code": "en"
},
"chat": {
"id": 123456789,
"type": "private"
},
"date": 1592767594,
"text": "Hello"
}
}
```
In this example, field `message.chat.id = 123456789` is necessary `chat_id` which shoud be stored in `TELEGRAM_BOT_CHAT_ID` variable.
## Initializing `TelegramClient`
If you set `ENV` variables `TELEGRAM_BOT_TOKEN` and `TELEGRAM_BOT_CHAT_ID`, then telegram client use them to run all commands. Alternatively you can initialize client by passing required token parameter.
```julia
using Telegram
tg = TelegramClient("TELEGRAM BOT TOKEN")
```
Since [Telegram.jl](https://github.com/Arkoniak/Telegram.jl) was built with the first-class support of the Telegram as a notification system, you can pass `chat_id` variable, which will be used then by default in every function related to messaging
```julia
using Telegram
tg = TelegramClient("TELEGRAM BOT TOKEN"; chat_id = "DEFAULT TELEGRAM CHAT ID")
Telegram.sendMessage(tg, text = "Hello world") # will send "Hello world" message
# to chat defined in `tg.chat_id`
```
Also, by default new `TelegramClient` is used globally in all [API Reference](@ref) related functions, so you can run commands like
```julia
using Telegram
using ConfigEnv
dotenv()
Telegram.sendMessage(text = "Hello world")
```
which will send "Hello world" message to the chat defined by `ENV["TELEGRAM_BOT_CHAT_ID"]` variable with the bot defined by `ENV["TELEGRAM_BOT_TOKEN"]` variable.
In order to override this behaviour you can set `use_globally` argument of [`TelegramClient`](@ref) function. To set previously defined client as a global, you should use [`useglobally!`](@ref).
## Using Telegram Bot API
Due to the rather large number of functions defined in [API Reference](@ref), they are hidden behind module declaration, so by default they should be prefixed with `Telegram.`
```julia
using Telegram
using ConfigEnv
dotenv()
Telegram.getMe() # returns information about bot
```
If this is inconvenient for some reason, you can either introduce new and short constant name, like this
```julia
using Telegram
using ConfigEnv
const TG = Telegram
dotenv()
TG.getMe()
```
or you can import all telegram Bot API by `using Telegram.API`, in this scenario you do not need to use any prefixes
```julia
using Telegram
using Telegram.API
using ConfigEnv
dotenv()
getMe()
```
In what follows we will use latter approach.
## Sending messages
If you set telegram client globally with `chat_id` as it is described in previous sections, then you can use message related function from [API Reference](@ref), omitting `chat_id` argument. For example, this is how you can use most basic `sendMessage` function
```julia
using Telegram, Telegram.API
using ConfigEnv
dotenv()
sendMessage(text = "Hello world")
```
Of course if you have more than one client or writing a bot which should communicate in multiple chats, you can add this parameters to function calls and they will override default values, for example
```
# .env
TG_TOKEN = 123456:asdasd
TG_TOKEN2 = 546789:zxczxc
TG_CHAT_ID = 1234
```
```julia
using Telegram, Telegram.API
using ConfigEnv
dotenv()
tg1 = TelegramClient(ENV["TG_TOKEN"]; chat_id = ENV["TG_CHAT_ID"])
tg2 = TelegramClient(ENV["TG_TOKEN2"])
sendMessage(tg1, text = "I am bot number 1", chat_id = 12345)
sendMessage(tg2, text = "I am bot number 2", chat_id = 54321)
```
will send messages from two different telegram bots to two different chats. It is useful for example, when you have telegram bot communicating with users and at the same time error logs of this bot is being sent to another chat by error reporting bot.
In addition to text messages you can also send any sort of `IO` objects: images, audio, documents and so on. For example to send picture you can do something like this
```julia
using Telegram, Telegram.API
using ConfigEnv
dotenv()
open("picture.jpg", "r") do io
sendPhoto(photo = io)
end
# or if you want it quick and dirty
sendPhoto(photo = open("picture.jpg", "r"))
```
Data sending is not limited by files only, you can send memory objects as well, in this case you should give them name in the form of `Pair`
```julia
using Telegram, Telegram.API
using ConfigEnv
dotenv()
io = IOBuffer()
print(io, "Hello world!")
sendDocument(document = "hello.txt" => io)
```
## Logging
You can also use [Telegram.jl](https://github.com/Arkoniak/Telegram.jl) as a logging system, for this you are provided with special [`TelegramLogger`](@ref) structure. It accepts `TelegramClient` object which must have initialized `chat_id` parameter
```julia
using Telegram
using Logging
using ConfigEnv
dotenv()
tg = TelegramClient()
tg_logger = TelegramLogger(tg; async = false)
with_logger(tg_logger) do
@info "Hello from telegram logger!"
end
```
But even better it is used together with [LoggingExtras.jl](https://github.com/oxinabox/LoggingExtras.jl) package, which can demux log messages and send critical messages to telegram backend without interrupting normal logging flow
```julia
using Telegram
using Logging, LoggingExtras
using ConfigEnv
dotenv()
tg = TelegramClient()
tg_logger = TelegramLogger(tg; async = false)
demux_logger = TeeLogger(
MinLevelLogger(tg_logger, Logging.Error),
ConsoleLogger()
)
global_logger(demux_logger)
@warn "It is bad" # goes to console
@info "normal stuff" # goes to console
@error "THE WORSE THING" # goes to console and telegram
@debug "it is chill" # goes to console
```
This way, just by adding few configuration lines, you can have unchanged logging system with telegram instant messaging if anything critically important happened.
Also, take notion of `async` argument of `TelegramLogger`. There are two modes of operating, usual and asynchronous. Second is useful if you have long running program and you do not want it to pause and send telegram message, so usual scenario is like this
```julia
while true
try
# do some stuff
catch err
@error err
# process error
end
end
```
But asynchronous mode has it's drawbacks, consider this for example
```julia
try
sqrt(:a)
catch err
@error err
end
```
if you run this snippet (with proper logger initialization) from command line, main thread stops before asynchronous message to telegram is sent. In such cases, it make sense to set `async = false`
## Bots
### Echo bot
With the help of [`run_bot`](@ref) method it's quite simple to set up simple telegram bots.
```julia
using Telegram, Telegram.API
using ConfigEnv
dotenv()
# Echo bot
run_bot() do msg
sendMessage(text = msg.message.text, chat_id = msg.message.chat.id)
end
```
### Turtle graphics bot
In this example we build more advanced bot, which is generating [turtle graphics](http://juliagraphics.github.io/Luxor.jl/stable/turtle/) with the help of [Luxor.jl](https://github.com/JuliaGraphics/Luxor.jl) package.
In addition to previous echo bot, this can do the following
1. Generate and send images in memory, without storing them in file system
2. Generate virtual keyboard, which can be used by users to make input easier
```julia
using Telegram, Telegram.API
using ConfigEnv
using Luxor
dotenv()
"""
draw_turtle(angles::AbstractVector)
Draw turtle graphics, where turtle is moving in spiral, on each step rotating
on next angle from `angles` vector. Vector `angles` is repeated cyclically.
"""
function draw_turtle(angles)
d = Drawing(600, 400, :png)
origin()
background("midnightblue")
🐢 = Turtle() # you can type the turtle emoji with \:turtle:
Pencolor(🐢, "cyan")
Penwidth(🐢, 1.5)
n = 5.0
dn = 1.0/length(angles)*0.7
for i in 1:400
for angle in angles
Forward(🐢, n)
Turn(🐢, angle)
n += dn
end
HueShift(🐢)
end
finish()
return d
end
"""
build_keyboard()
Generates [telegram keyboard](https://core.telegram.org/bots#keyboards) in the
form of 3x3 grid of buttons.
"""
function build_keyboard()
keyboard = Vector{Vector{String}}()
for x in 1:3
row = String[]
for y in 1:3
s = join(string.(Int.(round.(rand(rand(1:4)) * 360))), " ")
push!(row, s)
end
push!(keyboard, row)
end
return Dict(:keyboard => keyboard, :one_time_keyboard => true)
end
run_bot() do msg
message = get(msg, :message, nothing)
message === nothing && return nothing
text = get(message, :text, "")
chat = get(message, :chat, nothing)
chat === nothing && return nothing
chat_id = get(chat, :id, nothing)
chat_id === nothing && return nothing
if match(r"^[0-9 \.]+$", text) !== nothing
angles = parse.(Float64, split(text, " "))
turtle = draw_turtle(angles)
sendPhoto(photo = "turtle.png" => turtle.buffer, reply_markup = build_keyboard(), chat_id = chat_id)
else
sendMessage(text = "Unknown command, please provide turtle instructions in the form `angle1 angle2` or use keyboard", reply_markup = build_keyboard(), chat_id = chat_id, parse_mode = "MarkdownV2")
end
end
```
| Telegram | https://github.com/Arkoniak/Telegram.jl.git |
|
[
"MIT"
]
| 0.2.0 | cf009244790d6ac5b0be9aa4d624490b32a3790c | code | 716 | using QuantumStatePlots
using Documenter
DocMeta.setdocmeta!(QuantumStatePlots, :DocTestSetup, :(using QuantumStatePlots); recursive=true)
makedocs(;
modules=[QuantumStatePlots],
authors="JingYu Ning <[email protected]> and contributors",
repo="https://github.com/foldfelis-QO/QuantumStatePlots.jl/blob/{commit}{path}#{line}",
sitename="QuantumStatePlots.jl",
format=Documenter.HTML(;
prettyurls=get(ENV, "CI", "false") == "true",
canonical="https://foldfelis-QO.github.io/QuantumStatePlots.jl",
assets=String[],
),
pages=[
"Home" => "index.md",
],
)
deploydocs(;
repo="github.com/foldfelis-QO/QuantumStatePlots.jl",
devbranch="master",
)
| QuantumStatePlots | https://github.com/foldfelis-QO/QuantumStatePlots.jl.git |
|
[
"MIT"
]
| 0.2.0 | cf009244790d6ac5b0be9aa4d624490b32a3790c | code | 2948 | module QuantumStatePlots
using Plots
using QuantumStateBase
export plot_real, plot_imag
# ##########
# # wigner #
# ##########
"""
Plots.surface(w::WignerSurface; kwargv...)
Plot Wigner function in surface.
"""
function Plots.surface(w::WignerSurface; kwargv...)
lim = maximum(abs.(w.𝐰_surface))
default_kwargv = Dict([
:title => "Wigner Function",
:xlabel => "X",
:ylabel => "P",
:zlabel => "Quasiprobability",
:clim => (-lim, lim),
:color => :coolwarm,
:camera => (40, 30),
])
return surface(w.x_range, w.p_range, w.𝐰_surface'; merge(default_kwargv, kwargv)...)
end
"""
Plots.heatmap(w::WignerSurface; kwargv...)
Plot Wigner function in heatmap.
"""
function Plots.heatmap(w::WignerSurface; kwargv...)
lim = maximum(abs.(w.𝐰_surface))
default_kwargv = Dict([
:title => "Wigner Function",
:xlabel => "X",
:ylabel => "P",
:clim => (-lim, lim),
:color => :coolwarm,
:aspect_ratio => :equal,
])
return heatmap(w.x_range, w.p_range, w.𝐰_surface'; merge(default_kwargv, kwargv)...)
end
"""
Plots.contour(w::WignerSurface; kwargv...)
Plot Wigner function in contour.
"""
function Plots.contour(w::WignerSurface; kwargv...)
lim = maximum(abs.(w.𝐰_surface))
default_kwargv = Dict([
:title => "Wigner Function",
:xlabel => "X",
:ylabel => "P",
:clim => (-lim, lim),
:color => :coolwarm,
:aspect_ratio => :equal,
:fill => true,
:levels => 20,
])
return contour(w.x_range, w.p_range, w.𝐰_surface'; merge(default_kwargv, kwargv)...)
end
# #####
# # ρ #
# #####
"""
plot_real(ρ, [truncate::Integer]; kwargv...)
Plot real part of a density matrix.
## Arguments
* `truncate`: Truncate photon number
"""
function plot_real(ρ, truncate=0; kwargv...)
return plot_ρ(real(ρ), truncate; merge(Dict([:title => "Density Matrux (real part)"]), kwargv)...)
end
"""
plot_imag(ρ, [truncate::Integer]; kwargv...)
Plot imag part of a density matrix.
## Arguments
* `truncate`: Truncate photon number
"""
function plot_imag(ρ, truncate=0; kwargv...)
return plot_ρ(imag(ρ), truncate; merge(Dict([:title => "Density Matrux (imag part)"]), kwargv)...)
end
function plot_ρ(ρ::AbstractMatrix, truncate::Integer; kwargv...)
photon_number_range = Base.OneTo(size(ρ, 1))
if truncate > 0
photon_number_range = 1:truncate
ρ = ρ[photon_number_range, photon_number_range]
end
photon_number_range = photon_number_range .- 1 # labels of m, n
lim = maximum(abs.(ρ))
default_kwargv = Dict([
:title => "Density Matrux",
:xlabel => "m",
:ylabel => "n",
:clim => (-lim, lim),
:color => :coolwarm,
:aspect_ratio => :equal,
])
return heatmap(photon_number_range, photon_number_range, ρ; merge(default_kwargv, kwargv)...)
end
end
| QuantumStatePlots | https://github.com/foldfelis-QO/QuantumStatePlots.jl.git |
|
[
"MIT"
]
| 0.2.0 | cf009244790d6ac5b0be9aa4d624490b32a3790c | code | 626 | using QuantumStatePlots
using Plots
using QuantumStateBase
using VisualRegressionTests
using Test
@testset "QuantumStatePlots.jl" begin
ENV["GKSwstype"]="nul"
ρ = SqueezedState(0.8, π/8, Matrix, dim=100)
w = wigner(ρ, LinRange(-3, 3, 101), LinRange(-3, 3, 101))
# ##########
# # wigner #
# ##########
@plottest begin
surface(w)
end "assets/surface.png"
@plottest begin
heatmap(w)
end "assets/heatmap.png"
@plottest begin
contour(w)
end "assets/contour.png"
# #####
# # ρ #
# #####
@plottest begin
plot_real(ρ, 35)
end "assets/real.png"
@plottest begin
plot_imag(ρ, 35)
end "assets/imag.png"
end
| QuantumStatePlots | https://github.com/foldfelis-QO/QuantumStatePlots.jl.git |
|
[
"MIT"
]
| 0.2.0 | cf009244790d6ac5b0be9aa4d624490b32a3790c | docs | 1573 | # QuantumStatePlots
[](https://foldfelis-qo.github.io/QuantumStatePlots.jl/stable)
[](https://foldfelis-qo.github.io/QuantumStatePlots.jl/dev)
[](https://github.com/foldfelis-QO/QuantumStatePlots.jl/actions/workflows/CI.yml)
[](https://codecov.io/gh/foldfelis-QO/QuantumStatePlots.jl)
## Example
The quantum state and its wigner function:
```julia
julia> using QuantumStateBase
julia> ρ = SqueezedState(0.8, π/8, Matrix, dim=100)
julia> w = wigner(ρ, LinRange(-3, 3, 101), LinRange(-3, 3, 101));
```
### Wigner function
**Surface**
```julia
julia> using QuantumStatePlots, Plots
julia> surface(w)
```

**Heatmap**
```julia
julia> using QuantumStatePlots, Plots
julia> heatmap(w)
```

**Contour**
```julia
julia> using QuantumStatePlots, Plots
julia> contour(w)
```

### Density matrix
**Real part**
```julia
julia> using QuantumStatePlots, Plots
julia> plot_real(ρ, 35)
```

**Imag part**
```julia
julia> using QuantumStatePlots, Plots
julia> plot_imag(ρ, 35)
```

## Reference
* [Quantum mechanics as a statistical theory](https://doi.org/10.1017/S0305004100000487)
| QuantumStatePlots | https://github.com/foldfelis-QO/QuantumStatePlots.jl.git |
|
[
"MIT"
]
| 0.2.0 | cf009244790d6ac5b0be9aa4d624490b32a3790c | docs | 2264 | ```@meta
CurrentModule = QuantumStatePlots
```
# QuantumStatePlots
Documentation for [QuantumStatePlots](https://github.com/foldfelis-QO/QuantumStatePlots.jl).
## About
### Render Wigner function
Based on the definition of Wigner function in Fock basis:
```math
W_{mn}(x, p) = \frac{1}{2\pi} \int_{-\infty}^{\infty} dy \, e^{-ipy/h} \psi_m^*(x+\frac{y}{2}) \psi_n(x-\frac{y}{2})
```
Owing to the fact that the Moyal function is a generalized Wigner function. We can therefore implies that
```math
W(x, p) = \sum_{m, n} \rho_{m, n} W_{m, n}(x, p)
```
Here, ``\rho`` is the density matrix of the quantum state, defined as:
```math
\rho = \sum_{m, n, i} \, p_i \, | n \rangle \langle n | \hat{\rho}_i | m \rangle \langle m |
```
```math
\hat{\rho}_i = | \psi_i \rangle \langle \psi_i |
```
```math
\hat{\rho}_i \, \text{is a density operator of pure state.}
```
And, ``W_{m, n}(x, p)`` is the generalized Wigner function
```math
W_{m, n} = \{ \begin{array}{rcl}
\frac{1}{\pi} exp[-(x^2 + y^2)] (-1)^m \sqrt{2^{n-m} \frac{m!}{n!}} (x-ip)^{n-m} L_m^{n-m} (2x^2 + 2p^2), \, n \geq m \\
\frac{1}{\pi} exp[-(x^2 + y^2)] (-1)^n \sqrt{2^{m-n} \frac{n!}{m!}} (x+ip)^{m-n} L_n^{m-n} (2x^2 + 2p^2), \, n < m \\
\end{array}
```
### Example
The quantum state and its wigner function:
```julia-repl
julia> using QuantumStateBase
julia> ρ = SqueezedState(0.8, π/8, Matrix, dim=100)
julia> w = wigner(ρ, LinRange(-3, 3, 101), LinRange(-3, 3, 101));
```
#### Wigner function
**Surface**
```julia-repl
julia> using QuantumStatePlots, Plots
julia> surface(w)
```

**Heatmap**
```julia-repl
julia> using QuantumStatePlots, Plots
julia> heatmap(w)
```

**Contour**
```julia-repl
julia> using QuantumStatePlots, Plots
julia> contour(w)
```

#### Density matrix
**Real part**
```julia-repl
julia> using QuantumStatePlots, Plots
julia> plot_real(ρ, 35)
```

**Imag part**
```julia-repl
julia> using QuantumStatePlots, Plots
julia> plot_imag(ρ, 35)
```

### Reference
* [Quantum mechanics as a statistical theory](https://doi.org/10.1017/S0305004100000487)
## Index
```@index
```
## APIs
```@autodocs
Modules = [QuantumStatePlots]
```
| QuantumStatePlots | https://github.com/foldfelis-QO/QuantumStatePlots.jl.git |
|
[
"MIT"
]
| 0.1.10 | 31b36161dc4aa42e56b3ece2377df71d3ebce1c0 | code | 303 | module VlasiatorMakie
using Vlasiator, StatsBase, Printf
using Vlasiator: AxisUnit, ColorScale
using Makie
using Makie.LaTeXStrings: latexstring
include("typerecipe.jl")
include("fullrecipe.jl")
include("interactive.jl")
export
vlheatmap, vlslice, vlslices,
vdfvolume, vdfslice, vdfslices
end
| VlasiatorMakie | https://github.com/henry2004y/VlasiatorMakie.jl.git |
|
[
"MIT"
]
| 0.1.10 | 31b36161dc4aa42e56b3ece2377df71d3ebce1c0 | code | 10146 | # Full recipes for customized Vlasiator plots.
"""
viz(meta, var; args)
Visualize Vlasiator output `var` in `meta` with various options:
* `axisunit` - unit of axis of type `AxisUnit`
* `colorscale` - scale of colormap of type `ColorScale`
* `normal` - slice normal direction
* `vmin` - minimum color value
* `vmax` - maximum color value
* `comp` - selection of vector components
"""
@recipe(Viz, meta, var) do scene
Attributes(;
# generic attributes
colormap = :turbo,
markersize = Makie.theme(scene, :markersize),
colorrange = Makie.automatic,
levels = 5,
linewidth = 1.0,
alpha = 1.0,
# Vlasiator.jl attributes
axisunit = EARTH,
colorscale = Linear,
normal = :y, # only works in 3D
vmin = -Inf,
vmax = Inf,
comp = 0,
origin = 0.0,
)
end
function Makie.plot!(vlplot::Viz)
meta = vlplot[:meta][]
var = vlplot[:var][]
comp = vlplot.comp[]
normal = vlplot.normal[]
axisunit = vlplot.axisunit[]
vmin = vlplot.vmin[]
vmax = vlplot.vmax[]
colorscale = vlplot.colorscale[]
origin = vlplot.origin[]
if ndims(meta) == 1
data = readvariable(meta, var)
x = LinRange(meta.coordmin[1], meta.coordmax[1], meta.ncells[1])
lines!(vlplot, x, data)
elseif ndims(meta) == 2
pArgs = Vlasiator.set_args(meta, var, axisunit)
x, y = Vlasiator.get_axis(axisunit, pArgs.plotrange, pArgs.sizes)
data = Vlasiator.prep2d(meta, var, comp)
if var in ("fg_b", "fg_e", "vg_b_vol", "vg_e_vol") || endswith(var, "vg_v")
rho_ = findfirst(endswith("rho"), meta.variable)
if !isnothing(rho_)
rho = readvariable(meta, meta.variable[rho_])
rho = reshape(rho, pArgs.sizes[1], pArgs.sizes[2])
mask = findall(==(0.0), rho)
if ndims(data) == 2
@inbounds data[mask] .= NaN
else
ind = CartesianIndices((pArgs.sizes[1], pArgs.sizes[2]))
for m in mask
@inbounds data[:, ind[m][1], ind[m][2]] .= NaN
end
end
end
end
if colorscale == Log # Logarithmic plot
if any(<(0), data)
throw(DomainError(data, "Nonpositive data detected: use linear scale instead!"))
end
datapositive = data[data .> 0.0]
v1 = isinf(vmin) ? minimum(datapositive) : vmin
v2 = isinf(vmax) ? maximum(x->isnan(x) ? -Inf : x, data) : vmax
elseif colorscale == Linear
v1 = isinf(vmin) ? minimum(x->isnan(x) ? +Inf : x, data) : vmin
v2 = isinf(vmax) ? maximum(x->isnan(x) ? -Inf : x, data) : vmax
nticks = 9
ticks = range(v1, v2, length=nticks)
end
vlplot.colorrange = [v1, v2]
heatmap!(vlplot, x, y, data, colormap=vlplot.colormap)
else # 3D
pArgs = Vlasiator.set_args(meta, var, axisunit; normal, origin)
x, y = Vlasiator.get_axis(axisunit, pArgs.plotrange, pArgs.sizes)
data = Vlasiator.prep2dslice(meta, var, normal, comp, pArgs)
heatmap!(vlplot, x, y, data, colormap=vlplot.colormap)
end
vlplot
end
function vlheatmap(meta::MetaVLSV, var::String; fig=nothing, addcolorbar::Bool=true,
axisunit::AxisUnit=EARTH, kwargs...)
pArgs = Vlasiator.set_args(meta, var, axisunit)
isnothing(fig) && (fig = Figure())
c = viz(fig[1,1], meta, var; axisunit, kwargs...)
c.axis.title = @sprintf "t= %4.1fs" meta.time
# TODO: limitation in Makie 0.16.2: no conversion from initial String type
c.axis.xlabel = pArgs.strx
c.axis.ylabel = pArgs.stry
c.axis.autolimitaspect = 1
if addcolorbar
cbar = Colorbar(fig[1,2], c.plot, label=latexstring(pArgs.cb_title), tickalign=1)
colgap!(fig.layout, 7)
end
fig
end
"""
vlslices(meta::MetaVLSV, var; axisunit=SI, comp=0, origin=[0.0, 0.0, 0.0])
Three orthogonal slices of `var` from `meta`.
"""
function vlslices(meta::MetaVLSV, var::String; fig=nothing, axisunit::AxisUnit=SI,
comp::Union{Symbol, Int}=0, origin::AbstractVector=[0.0, 0.0, 0.0],
addcolorbar::Bool=false, colorscale::ColorScale=Linear, vmin::Real=-Inf, vmax::Real=Inf)
if axisunit == EARTH
unitx = " [Re]"
origin .*= Vlasiator.RE
else
unitx = " [m]"
end
pArgs1 = Vlasiator.set_args(meta, var, axisunit; normal=:x, origin=origin[1])
pArgs2 = Vlasiator.set_args(meta, var, axisunit; normal=:y, origin=origin[2])
pArgs3 = Vlasiator.set_args(meta, var, axisunit; normal=:z, origin=origin[3])
x, y = Vlasiator.get_axis(axisunit, pArgs3.plotrange, pArgs3.sizes)
x, z = Vlasiator.get_axis(axisunit, pArgs2.plotrange, pArgs2.sizes)
d1 = Vlasiator.prep2dslice(meta, var, :x, comp, pArgs1)
d2 = Vlasiator.prep2dslice(meta, var, :y, comp, pArgs2)
d3 = Vlasiator.prep2dslice(meta, var, :z, comp, pArgs3)
isnothing(fig) && (fig = Figure(fontsize=22))
ax = Axis3(fig[1,1], aspect=(1, 1, 1), elevation=pi/6, perspectiveness=0.5)
ax.xlabel = "x"*unitx
ax.ylabel = "y"*unitx
ax.zlabel = "z"*unitx
xlims!(ax, x[1], x[end])
ylims!(ax, y[1], y[end])
zlims!(ax, z[1], z[end])
vmin1, vmax1 = Vlasiator.set_lim(vmin, vmax, d1, colorscale)
vmin2, vmax2 = Vlasiator.set_lim(vmin, vmax, d2, colorscale)
vmin3, vmax3 = Vlasiator.set_lim(vmin, vmax, d3, colorscale)
colormap = :turbo
colorrange = (min(vmin1, vmin2, vmin3), max(vmax1, vmax2, vmax3))
h1 = heatmap!(ax, y, z, d1; colormap, colorrange, transformation=(:yz, origin[1]))
h2 = heatmap!(ax, x, z, d2; colormap, colorrange, transformation=(:xz, origin[2]))
h3 = heatmap!(ax, x, y, d3; colormap, colorrange, transformation=(:xy, origin[3]))
if addcolorbar
cbar = Colorbar(fig[1,2], h3, label=latexstring(pArgs1.cb_title), tickalign=1)
colgap!(fig.layout, 7)
end
fig, ax
end
"""
vdfvolume(meta, location; species="proton", unit=SI, flimit=-1.0, verbose=false)
Meshscatter plot of VDFs in 3D.
"""
function vdfvolume(meta::MetaVLSV, location::AbstractVector; species::String="proton",
unit::AxisUnit=SI, flimit::Real=-1.0, verbose::Bool=false, fig=nothing)
if haskey(meta.meshes, species)
vmesh = meta.meshes[species]
else
throw(ArgumentError("Unable to detect population $species"))
end
loc = unit == EARTH ?
location .* Vlasiator.RE :
location
# Calculate cell ID from given coordinates
cidReq = getcell(meta, loc)
cidNearest = getnearestcellwithvdf(meta, cidReq, species)
ccoords = getcellcoordinates(meta, cidNearest)
if verbose
@info "Species : $species"
@info "Original coordinates: $loc"
@info "Original cell : $cidReq"
@info "Actual cell : $cidNearest"
@info "Actual coordinates : $ccoords"
end
vcellids, vcellf = readvcells(meta, cidNearest; species)
V = getvcellcoordinates(meta, vcellids; species)
# Set sparsity threshold
if flimit < 0
flimit =
if hasvariable(meta, species*"/vg_effectivesparsitythreshold")
readvariable(meta, species*"/vg_effectivesparsitythreshold", cidNearest)
elseif hasvariable(meta, species*"/EffectiveSparsityThreshold")
readvariable(meta, species*"/EffectiveSparsityThreshold", cidNearest)
else
1f-16
end
end
# Drop velocity cells which are below the sparsity threshold
findex_ = vcellf .≥ flimit
fselect = vcellf[findex_]
Vselect = V[findex_]
cmap = resample_cmap(:turbo, 101; alpha=(0, 1))
isnothing(fig) && (fig = Figure(fontsize=22))
if unit == SI
ax = Axis3(fig[1, 1], aspect=(1,1,1), title="VDF at $ccoords (m) in log scale",
titlesize=26)
elseif unit == EARTH
coords = round.(ccoords ./ Vlasiator.RE, digits=1)
ax = Axis3(fig[1, 1], aspect=(1,1,1), title="VDF at $coords (RE) in log scale",
titlesize=26)
end
ax.xlabel = "vx [m/s]"
ax.ylabel = "vy [m/s]"
ax.zlabel = "vz [m/s]"
plt = meshscatter!(ax, Vselect, color=log10.(fselect),
marker=Rect3f(Vec3f(0), Vec3f(4*vmesh.dv[1])),
colormap=cmap,
transparency=true, shading=false)
cbar = Colorbar(fig, plt, label="f(v)")
fig[1, 2] = cbar
fig, ax
end
struct LogMinorTicks end
function Makie.get_minor_tickvalues(::LogMinorTicks, scale, tickvalues, vmin, vmax)
vals = Float64[]
extended_tickvalues = [
tickvalues[1] - (tickvalues[2] - tickvalues[1]);
tickvalues;
tickvalues[end] + (tickvalues[end] - tickvalues[end-1]);
]
for (lo, hi) in zip(
@view(extended_tickvalues[1:end-1]),
@view(extended_tickvalues[2:end])
)
interval = hi - lo
steps = log10.(LinRange(10^lo, 10^hi, 11))
append!(vals, steps[2:end-1])
end
return filter(x -> vmin < x < vmax, vals)
end
custom_formatter(values) = map(
v -> "10" * Makie.UnicodeFun.to_superscript(round(Int64, v)),
values
)
function vdfslice(meta, location;
species="proton", unit=SI, unitv="km/s", slicetype=:default, vslicethick=0.0,
center=:nothing, vmin=-Inf, vmax=Inf, weight=:particle, flimit=-1.0, verbose=false,
fig=nothing)
v1, v2, r1, r2, fweight, strx, stry, str_title =
Vlasiator.prep_vdf(meta, location;
species, unit, unitv, slicetype, vslicethick, center, weight, flimit, verbose)
isinf(vmin) && (vmin = minimum(fweight))
isinf(vmax) && (vmax = maximum(fweight))
verbose && @info "Active f range is $vmin, $vmax"
h = fit(Histogram, (v1, v2), weights(fweight), (r1, r2))
clims = (vmin, maximum(h.weights))
data = [isinf(x) ? NaN : x for x in log10.(h.weights)]
isnothing(fig) && (fig = Figure())
ax, hm = heatmap(fig[1, 1], r1, r2, data;
colormap=:turbo, colorrange=log10.(clims))
cb = Colorbar(fig[1, 2], hm;
label="f(v)",
tickformat=custom_formatter,
minorticksvisible=true,
minorticks=LogMinorTicks() )
ax.title = str_title
ax.xlabel = strx
ax.ylabel = stry
fig, ax
end | VlasiatorMakie | https://github.com/henry2004y/VlasiatorMakie.jl.git |
|
[
"MIT"
]
| 0.1.10 | 31b36161dc4aa42e56b3ece2377df71d3ebce1c0 | code | 4101 | # Interactive plots with Observables
"""
vlslice(meta, var; normal=:y, axisunit=SI, comp=0)
Interactive 2D slice of 3D `var` in `normal` direction.
"""
function vlslice(meta::MetaVLSV, var::String;
normal::Symbol=:y, axisunit::AxisUnit=SI, comp::Union{Symbol, Int}=0)
dir, str1, str2 =
if normal == :x
1, "y", "z"
elseif normal == :y
2, "x", "z"
else
3, "x", "y"
end
unitx = axisunit == EARTH ? " [Re]" : " [m]"
dx = meta.dcoord[dir] / 2^meta.maxamr
pArgs = Vlasiator.set_args(meta, var, axisunit; normal, origin=0.0)
x, y = Vlasiator.get_axis(axisunit, pArgs.plotrange, pArgs.sizes)
nsize = meta.ncells[dir]
depth = nsize*2^meta.maxamr
fig = Figure()
ax = Axis(fig[1, 1], aspect=DataAspect())
ax.xlabel = str1*unitx
ax.ylabel = str2*unitx
lsgrid = SliderGrid(fig[2, 1],
(label = "location in normal direction $(String(normal))",
range=1:depth,
format=x -> "$(x) cells"),
)
sliderobservables = [s.value for s in lsgrid.sliders]
slice = lift(sliderobservables...) do slvalues...
begin
origin = (slvalues[1]-1)*dx + meta.coordmin[dir]
pArgs = Vlasiator.set_args(meta, var, axisunit; normal, origin)
Vlasiator.prep2dslice(meta, var, normal, comp, pArgs)
end
end
heatmap!(ax, x, y, slice, colormap=:turbo)
set_close_to!(lsgrid.sliders[1], .5depth)
fig, ax
end
"""
vdfslices(meta, location; fmin=1f-16, species="proton", unit=SI, verbose=false)
Three orthogonal slices of VDFs from `meta` at `location`.
# Optional Arguments
- `fmin`: minimum VDF threshold for plotting.
- `species`: name of particle.
- `unit`: unit of input `location`, `SI` or `EARTH`.
"""
function vdfslices(meta::MetaVLSV, location::AbstractVector; fmin::AbstractFloat=1f-16,
species::String="proton", unit::AxisUnit=SI, verbose::Bool=false)
if haskey(meta.meshes, species)
vmesh = meta.meshes[species]
else
throw(ArgumentError("Unable to detect population $species"))
end
unit == EARTH && (location .*= Vlasiator.RE)
# Calculate cell ID from given coordinates
cidReq = getcell(meta, location)
cidNearest = getnearestcellwithvdf(meta, cidReq)
cellused = getcellcoordinates(meta, cidNearest)
if verbose
@info "Original coordinates : $location"
@info "Original cell : $(getcellcoordinates(meta, cidReq))"
@info "Nearest cell with VDF: $cellused"
let
x, y, z = getcellcoordinates(meta, cidNearest)
@info "cellid $cidNearest, x = $x, y = $y, z = $z"
end
end
vcellids, vcellf = readvcells(meta, cidNearest; species)
f = Vlasiator.reconstruct(vmesh, vcellids, vcellf)
fig = Figure()
ax = Axis3(fig[1, 1], aspect=(1,1,1), title = "VDF at $cellused in log scale")
ax.xlabel = "vx [m/s]"
ax.ylabel = "vy [m/s]"
ax.zlabel = "vz [m/s]"
x = LinRange(vmesh.vmin[1], vmesh.vmax[1], vmesh.vblock_size[1]*vmesh.vblocks[1])
y = LinRange(vmesh.vmin[2], vmesh.vmax[2], vmesh.vblock_size[2]*vmesh.vblocks[2])
z = LinRange(vmesh.vmin[3], vmesh.vmax[3], vmesh.vblock_size[3]*vmesh.vblocks[3])
lsgrid = SliderGrid(fig[2, 1],
(label="vx", range=1:length(x), format=i -> "$(round(x[i], digits=2))"),
(label="vy", range=1:length(y), format=i -> "$(round(y[i], digits=2))"),
(label="vz", range=1:length(z), format=i -> "$(round(z[i], digits=2))"),
)
for i in eachindex(f)
if f[i] < fmin f[i] = fmin end
end
data = log10.(f)
plt = volumeslices!(ax, x, y, z, data, colormap=:viridis)
#TODO: improve on colormap setup!
cbar = Colorbar(fig, plt,
label="f(v)",
minorticksvisible=true)
fig[1, 2] = cbar
# connect sliders to volumeslices update methods
sl_yz, sl_xz, sl_xy = lsgrid.sliders
on(sl_yz.value) do v; plt[:update_yz][](v) end
on(sl_xz.value) do v; plt[:update_xz][](v) end
on(sl_xy.value) do v; plt[:update_xy][](v) end
set_close_to!(sl_yz, .5length(x))
set_close_to!(sl_xz, .5length(y))
set_close_to!(sl_xy, .5length(z))
fig
end | VlasiatorMakie | https://github.com/henry2004y/VlasiatorMakie.jl.git |
|
[
"MIT"
]
| 0.1.10 | 31b36161dc4aa42e56b3ece2377df71d3ebce1c0 | code | 2144 | # Type conversion from Vlasiator to Makie
"Conversion for 1D plots"
function Makie.convert_arguments(P::PointBased, meta::MetaVLSV, var::String)
data = readvariable(meta, var)
x = LinRange(meta.coordmin[1], meta.coordmax[1], meta.ncells[1])
([Point2f(i, j) for (i, j) in zip(x, data)],)
end
"Conversion for 2D plots."
function Makie.convert_arguments(P::SurfaceLike, meta::MetaVLSV, var::String,
axisunit::AxisUnit=EARTH, comp::Union{Symbol, Int}=0, normal::Symbol=:y,
origin::AbstractFloat=0.0)
if meta.maxamr > 0
pArgs = Vlasiator.set_args(meta, var, axisunit; normal, origin)
data = Vlasiator.prep2dslice(meta, var, normal, comp, pArgs)
else
pArgs = Vlasiator.set_args(meta, var, axisunit)
data = Vlasiator.prep2d(meta, var, comp)
end
x, y = Vlasiator.get_axis(axisunit, pArgs.plotrange, pArgs.sizes)
(x, y, data)
end
"Conversion for 3D plots."
function Makie.convert_arguments(P::VolumeLike, meta::MetaVLSV, var::String,
axisunit::AxisUnit=EARTH, comp::Union{Symbol, Int}=1)
(;ncells, coordmin, coordmax) = meta
# Scale the sizes to the highest refinement level
sizes = ncells .<< meta.maxamr # data needs to be refined later
if axisunit == EARTH
x = LinRange(coordmin[1], coordmax[1], sizes[1]) ./ Vlasiator.RE
y = LinRange(coordmin[2], coordmax[2], sizes[2]) ./ Vlasiator.RE
z = LinRange(coordmin[3], coordmax[3], sizes[3]) ./ Vlasiator.RE
else
x = LinRange(coordmin[1], coordmax[1], sizes[1])
y = LinRange(coordmin[2], coordmax[2], sizes[2])
z = LinRange(coordmin[3], coordmax[3], sizes[3])
end
if startswith(var, "fg")
data = meta[var]
if comp == 0
data = [√(data[1,i,j,k]^2 + data[2,i,j,k]^2 + data[3,i,j,k]^2)
for k in axes(data, 4), j in axes(data, 3), i in axes(data, 2)]
else
data = data[comp,:,:,:]
end
else
data, _ = Vlasiator.fillmesh(meta, var)
# Select on the finest refinement level
if comp == 0
data = data[1][end][1,:,:,:]
else
data = data[1][end][comp,:,:,:]
end
end
(x, y, z, data)
end | VlasiatorMakie | https://github.com/henry2004y/VlasiatorMakie.jl.git |
|
[
"MIT"
]
| 0.1.10 | 31b36161dc4aa42e56b3ece2377df71d3ebce1c0 | code | 1459 | using VlasiatorMakie, Vlasiator, LazyArtifacts
using Test
using Suppressor: @suppress_err
using GLMakie
@testset "VlasiatorMakie.jl" begin
rootpath = artifact"testdata"
files = joinpath.(rootpath, ("bulk.1d.vlsv", "bulk.2d.vlsv", "bulk.amr.vlsv"))
meta1 = load(files[1])
meta2 = load(files[2])
meta3 = load(files[3])
var = "proton/vg_rho"
fig, ax, plt = viz(meta1, var)
@test plt isa Combined
fig, ax, plt = viz(meta2, "vg_b_vol")
@test plt isa Combined
fig, ax, plt = viz(meta3, "proton/vg_rho")
@test plt isa Combined
fig, ax, plt = lines(meta1, var)
@test plt isa Lines
fig = vlheatmap(meta2, var)
@test fig isa Figure
fig, ax, plt = heatmap(meta2, var)
@test plt isa Heatmap
fig, ax, plt = heatmap(meta2, var, EARTH, 0, :z)
@test plt isa Heatmap
fig, ax = vlslice(meta3, var)
@test fig isa Figure
fig, ax = vlslices(meta3, var; addcolorbar=true)
@test fig isa Figure
fig = volume(meta3, "fg_b", EARTH, 3; algorithm=:iso, isovalue=0.0, isorange=1e-9)
@test fig isa Makie.FigureAxisPlot
location = [0.0, 0.0, 0.0]
fig, ax = VlasiatorMakie.vdfslice(meta1, location)
@test fig isa Figure
fig = vdfslices(meta1, location)
@test fig isa Figure
@suppress_err begin
fig, ax = vdfvolume(meta1, location; verbose=true)
end
@test fig isa Figure
fig, ax = vdfvolume(meta1, location; unit=EARTH, verbose=false)
@test fig isa Figure
end
| VlasiatorMakie | https://github.com/henry2004y/VlasiatorMakie.jl.git |
|
[
"MIT"
]
| 0.1.10 | 31b36161dc4aa42e56b3ece2377df71d3ebce1c0 | docs | 3012 | # VlasiatorMakie.jl
[](https://github.com/henry2004y/VlasiatorMakie.jl/actions?query=workflow%3ACI+branch%3Amain)
[](https://codecov.io/gh/henry2004y/VlasiatorMakie.jl)
Makie recipes for visualization of [Vlasiator.jl](https://github.com/henry2004y/Vlasiator.jl.git).
## Installation
```julia
] add VlasiatorMakie
```
## Usage
Both simple type conversion recipes for 1D and 2D data and full recipes for customized and interactive plots are provided.
See more example outputs in [Vlasiator gallery](https://henry2004y.github.io/Vlasiator.jl/dev/gallery/#Makie) and detailed usages in the [manual](https://henry2004y.github.io/Vlasiator.jl/dev/manual/#Makie-Backend) and test scripts. Due to the current limitation of the full recipes from Makie, it is recommended to work with the simpler type recipes, i.e. identical plotting functions as in Makie but with the first two arguments being `meta` and `var`.
```julia
using Vlasiator, VlasiatorMakie, GLMakie
file = "bulk.0000001.vlsv"
meta = load(file)
heatmap(meta, "proton/vg_rho")
```
3D isosurface:
```julia
fig = volume(meta, "fg_b", EARTH, 3; algorithm=:iso, isovalue=0.0, isorange=1e-9)
```
Single figure contour plot:
```julia
fig = Figure(resolution=(700, 600), fontsize=18)
ga = fig[1,1] = GridLayout()
ax = Axis(fig[1,1],
aspect = DataAspect(),
title = "t = $(round(meta.time, digits=1))s",
xlabel = L"x [$R_E$]",
ylabel = L"y [$R_E$]"
)
hmap = heatmap!(meta, "proton/vg_rho", colormap=:turbo)
cbar = Colorbar(fig, hmap, label=L"$\rho$ [amu/cc]", width=13,
ticksize=13, tickalign=1, height=Relative(1))
fig[1,2] = cbar
colgap!(ga, 1)
```
Multi-figure contour plots:
```julia
fig = Figure(resolution=(1100, 800), fontsize=18)
axes = []
v_str = ["CellID", "proton/vg_rho", "proton/vg_v",
"vg_pressure", "vg_b_vol", "vg_e_vol"]
c_str = ["", L"$\rho$ [amu/cc]", "[m/s]", "[Pa]", "[T]", "[V/m]"]
c = 1
for i in 1:2, j in 1:2:5
ax = Axis(fig[i,j], aspect=DataAspect(),
xgridvisible=false, ygridvisible=false,
title = v_str[c],
xlabel = L"x [$R_E$]",
ylabel = L"y [$R_E$]")
hmap = heatmap!(meta, v_str[c], colormap=:turbo)
cbar = Colorbar(fig, hmap, label=c_str[c], width=13,
ticksize=13, tickalign=1, height=Relative(1))
fig[i, j+1] = cbar
c += 1
push!(axes, ax) # just in case you need them later.
end
fig[0, :] = Label(fig, "t = $(round(meta.time, digits=1))s")
```
Adjusting axis limits:
```julia
location = [0, 0, 0]
fig = VlasiatorMakie.vdfslice(meta, location)
xlims!(fig.content[1], -1000, 1000)
ylims!(fig.content[1], -1000, 1000)
limits!(fig.content[1], 0, 10, 0, 10) # xmin, xmax, ymin, ymax
```
Saving figure:
```julia
fig = vdfvolume(meta, location)
save("output.png", fig)
```
The resolution is a property of the Figure object returned from the function.
| VlasiatorMakie | https://github.com/henry2004y/VlasiatorMakie.jl.git |
|
[
"MIT"
]
| 0.2.3 | c886092ba2e14a4500a3e0b99b298d104fe60b46 | code | 427 | module InteractiveGeodynamicsGLMakieExt
import InteractiveGeodynamics: sill_intrusion_1D
# We do not check `isdefined(Base, :get_extension)` as recommended since
# Julia v1.9.0 does not load package extensions when their dependency is
# loaded from the main environment.
if VERSION >= v"1.9.1"
using GLMakie
else
using ..GLMakie
end
include("../src/ThermalIntrusion_1D/ThermalCode_1D_GLMakie.jl")
end # module
| InteractiveGeodynamics | https://github.com/JuliaGeodynamics/InteractiveGeodynamics.jl.git |
|
[
"MIT"
]
| 0.2.3 | c886092ba2e14a4500a3e0b99b298d104fe60b46 | code | 815 | module InteractiveGeodynamics
# Rising sphere app
include("./RisingSphere/RisingSphere_Dash.jl")
using .RisingSphereTools
export rising_sphere
# rayleigh_taylor app
include("./RayleighTaylorInstability/RTI_Dash.jl")
using .RTITools
export rayleigh_taylor
# convection app
include("./RayleighBenardConvection/Convection_Dash.jl")
using .ConvectionTools
export convection
# free subduction app
include("./FreeSubduction/FreeSubduction_Dash.jl")
using .FreeSubductionTools
export subduction
# folding app
include("./Folding/Folding_Dash.jl")
using .FoldingTools
export folding
"""
sill_intrusion_1D
GUI to intrude magma-filles sills into the crust using a 1D thermal model.
It requires you to load `GLMakie`.
"""
function sill_intrusion_1D end
export sill_intrusion_1D
end # module InteractiveGeodynamics
| InteractiveGeodynamics | https://github.com/JuliaGeodynamics/InteractiveGeodynamics.jl.git |
|
[
"MIT"
]
| 0.2.3 | c886092ba2e14a4500a3e0b99b298d104fe60b46 | code | 19311 | #module Dash_tools
using DelimitedFiles
using Dash, DashBootstrapComponents
using PlotlyJS
#export create_main_figure, get_data, get_trigger, read_colormaps, active_switch, has_pvd_file,
# make_title, make_plot, make_plot_controls, make_id_label, make_time_card, make_menu,
# make_accordion_item, make_rheological_parameters
# various handy and reusable functions
"""
Creates the main figure plot.
"""
function create_main_figure(OutFile, cur_t, x=1:10, y=1:10, data=rand(10, 10),
x_con=1:10, y_con=1:10, data_con=rand(10, 10)
;
colorscale="batlow",
field="phase",
add_contours=true,
add_velocity=false,
contour_field="phase",
session_id="",
cmaps=[])
data_plot = [heatmap(x=x,
y=y,
z=data,
colorscale=cmaps[Symbol(colorscale)],
colorbar=attr(thickness=5, title=field, len=0.75),
#zmin=zmin, zmax=zmax
)
]
if add_contours == true
push!(data_plot, (
contour(x=x_con,
y=y_con,
z=data_con,
colorscale=cmaps[Symbol(colorscale)],
contours_coloring="lines",
line_width=2,
colorbar=attr(thickness=5, title=contour_field, x=1.2, yanchor=0.5, len=0.75),
#zmin=zmin, zmax=zmax
)))
end
if add_velocity == true
user_dir = simulation_directory(session_id, clean=false)
arrowhead, line = calculate_quiver(OutFile, cur_t, cmaps; colorscale="batlow", Dir=user_dir)
push!(data_plot, arrowhead)
push!(data_plot, line)
end
layout_data = (xaxis=attr(
title="Width",
tickfont_size=14,
tickfont_color="rgb(100, 100, 100)",
scaleanchor="y", scaleratio=1,
autorange=false, automargin="top",
range=[x[1],x[end]],
showgrid=false,
zeroline=false
),
yaxis=attr(
title="Depth",
tickfont_size=14,
tickfont_color="rgb(10, 10, 10)",
autorange=false, automargin="top",
autorangeoptions=attr(clipmax=0),
range=[minimum(y),maximum(y)],
showgrid=false,
zeroline=false
),
margin=attr(autoexpand="true", pad=1),
)
# Specify size; since this does not always work you can set an autosize too (gives more white space)
layout_data = merge(layout_data, (autosize=true,));
# Create plot
pl = (id="fig_cross",
data=data_plot,
colorbar=Dict("orientation" => "v", "len" => 0.5),
layout=layout_data,
config=(edits = (shapePosition=true,)),
)
return pl
end
"""
x, z, data = get_data(OutFile::String, tstep::Int64=0, field::String="phase", Dir="")
This loads the timestep `tstep` from a LaMEM simulation with field `field`.
"""
function get_data(OutFile::String, tstep::Int64=0, field_units::String="phase", Dir="")
field = strip_units(field_units)
data,time = read_LaMEM_timestep(OutFile, tstep, Dir)
value = extract_data_fields(data, field) # get field; can handle tensors & vectors as well
fields= String.(keys(data.fields))
fields_available = get_fields(fields)
x = data.x.val[:,1,1]
z = data.z.val[1,1,:]
data2D = value[:,1,:]'
return x, z, data2D, time[1], fields_available
end
"""
Returns the trigger callback (simplifies code).
"""
function get_trigger()
tr = callback_context().triggered;
trigger = []
if !isempty(tr)
trigger = callback_context().triggered[1]
trigger = trigger[1]
end
return trigger
end
"""
Add-ons to names for vector & tensors (used in dropdown menu).
"""
function vector_tensor()
vector = [ "_$a" for a in ["x","y","z"]]
tensor = [ "_$(b)$(a)" for a in ["x","y","z"], b in ["x","y","z"] ][:]
scalar = [""]
return scalar, vector, tensor
end
"""
This extracts a LaMEM datafield and in case it is a tensor or scalar (and has _x, _z or so at the end).
"""
function extract_data_fields(data, field)
_, vector, tensor = vector_tensor()
if hasfield(typeof(data.fields),Symbol(field)) # scalar
value = data.fields[Symbol(field)]
else # vector/tensor
extension = split(field,"_")[end]
n = length(extension)
name = field[1:end-n-1]
if n==1
id = findall(vector.=="_"*extension)[1]
else
id = findall(tensor.=="_"*extension)[1]
end
value = data.fields[Symbol(name)][id]
end
return value
end
"""
Returns a list with fields. In case the LaMEM field is a vector field, it adds _x, _y etc; im case of tensor, _xx, _xy etc.
"""
function get_fields(fields)
scalar, vector, tensor = vector_tensor()
fields_available= []
for f in fields
if f=="velocity"
add = vector
elseif f=="strain_rate" || f=="stress"
add = tensor
else
add = scalar
end
for a in add
push!(fields_available, f*a)
end
end
return fields_available
end
"""
Functions building up to quiver plot
"""
function extract_velocity(OutFile, cur_t, Dir="")
data, _ = read_LaMEM_timestep(OutFile, cur_t, Dir)
Vx = data.fields.velocity[1][:,1,:]
Vz = data.fields.velocity[3][:,1,:]
x_vel = data.x.val[:,1,1]
z_vel = data.z.val[1,1,:]
return Vx, Vz, x_vel, z_vel
end
"""
Interpolate velocities.
"""
function interpolate_velocities(x, z, Vx, Vz)
# interpolate velocities to a quarter of original grid density
itp_Vx = interpolate((x, z), Vx, Gridded(Linear()))
itp_Vz = interpolate((x, z), Vz, Gridded(Linear()))
interpolation_coords_x = LinRange(x[1], x[end], 15)
interpolation_coords_z = LinRange(z[1], z[end], 15)
Vx_interpolated = zeros(length(interpolation_coords_x) * length(interpolation_coords_z))
Vz_interpolated = zeros(length(interpolation_coords_x) * length(interpolation_coords_z))
itp_coords_x = zeros(length(interpolation_coords_x) * length(interpolation_coords_z))
itp_coords_z = zeros(length(interpolation_coords_x) * length(interpolation_coords_z))
itp_coords_x = repeat(interpolation_coords_x, outer=length(interpolation_coords_z))
itp_coords_z = repeat(interpolation_coords_z, inner=length(interpolation_coords_x))
for i in eachindex(itp_coords_x)
Vx_interpolated[i] = itp_Vx(itp_coords_x[i], itp_coords_z[i])
Vz_interpolated[i] = itp_Vz(itp_coords_x[i], itp_coords_z[i])
end
return Vx_interpolated, Vz_interpolated, itp_coords_x, itp_coords_z
end
"""
Calculate angle between two vectors.
"""
function calculate_angle(Vx_interpolated, Vz_interpolated)
angle = zeros(size(Vx_interpolated))
north = [1, 0]
for i in eachindex(angle)
angle[i] = asind((north[1] * Vx_interpolated[i] + north[2] * Vz_interpolated[i]) / (sqrt(north[1]^2 + north[2]^2) * sqrt(Vx_interpolated[i]^2 + Vz_interpolated[i]^2)))
if isnan(angle[i]) == true
angle[i] = 180.0
end
if angle[i] < 90 && angle[i] > -90 && Vz_interpolated[i] < 0
angle[i] = 180.0 - angle[i]
end
end
return angle
end
"""
Calculate quiver.
"""
function calculate_quiver(OutFile, cur_t, cmaps; colorscale="batlow", Dir="")
Vx, Vz, x, z = extract_velocity(OutFile, cur_t, Dir)
Vx_interpolated, Vy_interpolated, interpolation_coords_x, interpolation_coords_z = interpolate_velocities(x, z, Vx, Vz)
angle = calculate_angle(Vx_interpolated, Vy_interpolated)
magnitude = sqrt.(Vx_interpolated .^ 2 .+ Vy_interpolated .^ 2)
arrow_head = scatter(
x=interpolation_coords_x,
y=interpolation_coords_z,
mode="markers",
colorscale=cmaps[Symbol(colorscale)],
marker=attr(size=15, color=magnitude, angle=angle, symbol="triangle-up"),
colorbar=attr(title="Velocity", thickness=5, x=1.4),
)
line = scatter(
x=interpolation_coords_x,
y=interpolation_coords_z,
mode="markers",
colorscale=cmaps[Symbol(colorscale)],
marker=attr(size=10, color=magnitude, angle=angle, symbol="line-ns", line=attr(width=2, color=magnitude)),
)
return arrow_head, line
end
"""
This reads colormaps and transfers them into plotly format. The colormaps are supposed to be provided in ascii text format
"""
function read_colormaps(; dir_colormaps="" , scaling=256)
#if isempty(dir_colormaps)
# dir_colormaps=joinpath(pkgdir(InteractiveGeodynamics),"src/assets/colormaps/")
#end
# Read all colormaps
colormaps = NamedTuple();
for map in readdir(dir_colormaps)
data = readdlm(dir_colormaps*map)
name_str = map[1:end-4]
if contains(name_str,"reverse")
reverse=true
data = data[end:-1:1,:]
else
reverse=false
end
name = Symbol(name_str)
# apply scaling
data_rgb = Int64.(round.(data*scaling))
# Create the format that plotly wants:
n = size(data,1)
fac = range(0,1,n)
data_col = [ [fac[i], "rgb($(data_rgb[i,1]),$(data_rgb[i,2]),$(data_rgb[i,3]))"] for i=1:n]
col = NamedTuple{(name,)}((data_col,))
colormaps = merge(colormaps, col)
end
return colormaps
end
"""
Returns a row containing the title of the page.
"""
function make_title(title_app::String)
item = dbc_row(html_h1(title_app), style=Dict("margin-top" => 0, "textAlign" => "center"))
return item
end
"""
Returns a row containing the main plot.
"""
function make_plot(OutFile="",cmaps=[]; width="80vw", height="80vh")
item = dbc_row([
dcc_graph(id="figure_main",
figure=create_main_figure(OutFile, 0, cmaps=cmaps),
#animate = false,
#responsive=false,
#clickData = true,
#config = PlotConfig(displayModeBar=false, scrollZoom = false),
style=attr(width=width, height=height)
)
])
return item
end
"""
Returns a column containing all the media control buttons.
"""
function make_media_buttons()
item = dbc_col([
dbc_button("<<", id="button-start", outline=true, color="primary", size="sg", class_name="me-md-1 col-2"),
dbc_button("<", id="button-back", outline=true, color="primary", size="sg", class_name="me-md-1 col-1"),
dbc_button("Play/Pause", id="button-play", outline=true, color="primary", size="sg", class_name="me-md-1 col-3"),
dbc_button(">", id="button-forward", outline=true, color="primary", size="sg", class_name="me-md-1 col-1"),
dbc_button(">>", id="button-last", outline=true, color="primary", size="sg", class_name="me-md-1 col-2"),
], class_name="d-grid gap-2 d-md-flex justify-content-md-center")
return item
end
"""
Retunrs an empty column.
"""
function make_empty_col()
return dbc_col([])
end
"""
Retunrs an empty row.
"""
function make_empty_row()
return dbc_row([])
end
"""
Returns a row containing the media buttons, each one in a column.
"""
function make_plot_controls()
item = dbc_row([
#make_screenshot_button(),
make_empty_col(),
make_media_buttons(),
make_empty_col(),
])
return item
end
"""
Returns a column containing a screenshot button.
"""
function make_screenshot_button()
item = dbc_col([
dbc_button("Save figure", id="button-save-fig", color="secondary", size="sg", class_name="col-4")
], class_name="d-grid gap-2 d-md-flex justify-content-md-center")
return item
end
"""
Return a row with the id of the current user session.
"""
function make_id_label()
item = dbc_row([dbc_label("", id="label-id")])
return item
end
"""
Returns a row containing a card with time information of the simulation.
"""
function make_time_card()
item = dbc_row([
html_p(),
dbc_card([
dbc_label(" Time: 0 Myrs", id="label-time"),
dbc_label(" Timestep: 0", id="label-timestep"
)],
color="secondary",
class_name="mx-auto col-11",
outline=true),
html_p()])
return item
end
"""
Returns a row containing a label, a tooltip and a filling box.
"""
function make_accordion_item(label::String="param", idx::String="id", msg::String="Message", value::_T=1*one(_T), low=nothing, high=nothing) where _T <: Number
low = _check_min(_T, low)
high = _check_max(_T, high)
item = dbc_row([ # domain width
dbc_col([
dbc_label(label, id=idx*"_label", size="md"),
dbc_tooltip(msg, target=idx*"_label")
]),
dbc_col(dbc_input(id=idx, placeholder=string(value), value=value, type="number", min=low, size="md"))
])
return item
end
@inline _check_min(::Float64, ::Nothing) = 1e-10
@inline _check_min(::Int64, ::Nothing) = 2
@inline _check_min(::T, x) where T = x
@inline _check_max(::Float64, ::Nothing) = 10000
@inline _check_max(::Int64, ::Nothing) = 10_000
@inline _check_max(::T, x) where T = x
#=
"""
Returns a row containing a label, a tooltip and a filling box.
"""
function make_accordion_item(label::String="param", idx::String="id", msg::String="Message", value::Int64=2, mini::Int64=2, maxi::Int64=10_000)
item = dbc_row([ # domain width
dbc_col([
dbc_label(label, id=idx*"_label", size="md"),
dbc_tooltip(msg, target=idx*"_label")
]),
dbc_col(dbc_input(id=idx, placeholder=string(value), value=value, type="number", min=mini, size="md"))
])
return item
end
=#
"""
Returns an accordion menu containing the plotting parameters.
"""
function make_plotting_parameters(cmaps; show_field="phase")
item = dbc_accordionitem(title="Plotting Parameters", [
dbc_row([
dbc_label("Select field to plot: ", size="md"),
dcc_dropdown(id="plot_field", options = [show_field], value=show_field, className="col-12")
]),
dbc_row(html_p()),
dbc_row([ # color map
dbc_col([
dbc_label("Colormap:", id="cmap", size="md"),
dbc_tooltip(target="cmap", "Choose the colormap of the plot")
]),
dbc_col(dcc_dropdown(id="color_map_option", options = String.(keys(cmaps)), value=String.(keys(cmaps))[1]))
]),
dbc_row(html_p()),
dbc_row(html_hr()),
dbc_row([
dbc_checklist(options=["Overlap plot with contour:"],
id="switch-contour",
switch=true,
),
dbc_row(html_p()),
dbc_col(dcc_dropdown(id="contour_option" ,options = ["phase"], value="phase", disabled=true))
]),
dbc_row(html_p()),
dbc_row(html_hr()),
dbc_row([
dbc_checklist(options=["Overlap velocity"],
id="switch-velocity",
switch=true,
)
]),
])
return item
end
"""
make_menu(cmaps; show_field="phase")
Return a row containing the menu with the simulation, rheological and plotting parameters.
"""
function make_menu(cmaps; show_field="phase")
if !isnothing(make_geometry_parameters())
item = dbc_row([
dbc_accordion(always_open=true, [
make_simulation_parameters(),
make_geometry_parameters(),
make_rheological_parameters(),
make_plotting_parameters(cmaps, show_field=show_field),
]),
])
else
item = dbc_row([
dbc_accordion(always_open=true, [
make_simulation_parameters(),
make_rheological_parameters(),
make_plotting_parameters(cmaps, show_field=show_field),
]),
])
end
return item
end
"""
Returns a row containing the RUN button.
"""
function make_run_button()
item = dbc_row([
html_p(),
dbc_button("RUN", id="button-run", size="lg", class_name="col-11 mx-auto"),
html_p()])
return item
end
"""
simulation_directory(session_id; clean=true )
Create a new directory named by session-id and optionally cleans it
"""
function simulation_directory(session_id; clean=true)
base_dir = pwd();
dirname = String(session_id)
if isdir("simulations")
if isdir(joinpath("simulations" , dirname)) == false
mkdir(joinpath("simulations" , dirname))
end
else
mkdir("simulations")
mkdir(joinpath("simulations" , dirname))
end
user_dir = joinpath("simulations" , dirname)
if clean
# clean directory
cd(user_dir)
clean_directory() # removes all existing LaMEM files
cd(base_dir)
end
return user_dir
end
has_pvd_file(OutFile, user_dir) = isfile(joinpath(user_dir, OutFile * ".pvd"))
"""
active_switch = active_switch(switch)
Returns true if the switch is on
"""
function active_switch(switch)
active_switch_val=false;
if !isnothing(switch)
if !isempty(switch)
active_switch_val = true
end
end
return active_switch_val
end
"""
fields_available_units = fields_available_units
This adds units to the fields available in the LaMEM simulation
"""
function add_units(fields_available)
fields_available_units = fields_available
fields_available_units = replace(fields_available_units, "visc_total"=>"visc_total [log₁₀(Pas)]",
"visc_creep"=>"visc_creep [log₁₀(Pas)]",
"velocity_x"=>"velocity_x [cm/yr]",
"velocity_z"=>"velocity_z [cm/yr]",
"pressure"=>"pressure [MPa]",
"temperature"=>"temperature [°C]",
"j2_dev_stress"=>"j2_dev_stress [MPa]",
"j2_strain_rate"=>"j2_strain_rate [1/s]",
"density"=>"density [kg/m³]",
)
return fields_available_units
end
function strip_units(fields_available_units)
fields_available = fields_available_units
fields_available = replace(fields_available,
"visc_total [log₁₀(Pas)]"=>"visc_total",
"visc_creep [log₁₀(Pas)]"=>"visc_creep",
"velocity_x [cm/yr]"=>"velocity_x",
"velocity_z [cm/yr]"=>"velocity_z",
"pressure [MPa]"=>"pressure",
"temperature [°C]"=>"temperature",
"density [kg/m³]"=>"density",
"j2_dev_stress [MPa]"=>"j2_dev_stress",
"j2_strain_rate [1/s]"=>"j2_strain_rate",
)
return fields_available
end
#end | InteractiveGeodynamics | https://github.com/JuliaGeodynamics/InteractiveGeodynamics.jl.git |
|
[
"MIT"
]
| 0.2.3 | c886092ba2e14a4500a3e0b99b298d104fe60b46 | code | 12490 | module FoldingTools
using Dash, DashBootstrapComponents
using PlotlyJS
using LaMEM
using UUIDs
using Interpolations
using GeophysicalModelGenerator
using HTTP
export folding
pkg_dir = Base.pkgdir(FoldingTools)
@show pkg_dir
include(joinpath(pkg_dir,"src/dash_tools.jl"))
include(joinpath(pkg_dir,"src/Folding/dash_functions_Folding.jl"))
include(joinpath(pkg_dir,"src/Folding/Setup.jl"))
"""
folding(; host = HTTP.Sockets.localhost, port=8050, wait=false, width="80vw", height="80vh", cores=1)
This starts a folding GUI
"""
function folding(; host = HTTP.Sockets.localhost, port=8050, wait=false, width="80vw", height="80vh", cores=1)
pkg_dir = Base.pkgdir(FoldingTools)
GUI_version = "0.1.3"
cmaps = read_colormaps(dir_colormaps=joinpath(pkg_dir,"src/assets/colormaps/"))
title_app = "Viscous Folding"
OutFile = "Folding"
#app = dash(external_stylesheets=[dbc_themes.CYBORG])
app = dash(external_stylesheets = [dbc_themes.BOOTSTRAP, dbc_icons.BOOTSTRAP], prevent_initial_callbacks=false)
app.title = title_app
# Main code layout
app.layout = html_div() do
dbc_container(className="mxy-auto", fluid=true, [
make_title(title_app),
dbc_row([
dbc_col([
make_plot("",cmaps), # show graph
make_plot_controls(), # show media buttons
make_id_label(), # show user id
]),
dbc_col([
make_time_card(), # show simulation time info
make_menu(cmaps), # show menu with simulation parameters, rheological parameters, and plotting parameters
make_run_button() # show the run simulation button
])
]),
# Store a unique number of our session in the webpage
dcc_store(id="session-id", data=""),
# Store info related to the simulation and current timestep
dcc_store(id="current_timestep", data="0"),
dcc_store(id="last_timestep", data="0"),
dcc_store(id="update_fig", data="0"),
# Start an interval that updates the number every second
dcc_interval(id="session-interval", interval=100, n_intervals=0, disabled=true)
])
end
# This creates an initial session id that is unique for this session
# it will run on first start
callback!(app,
Dash.Output("session-id", "data"),
Dash.Output("label-id", "children"),
Input("session-id", "data")
) do session_id
session_id = UUIDs.uuid4()
str = "id=$(session_id), v=$(GUI_version)"
return String("$(session_id)"), str
end
# Call run button
callback!(app,
Dash.Output("session-interval", "disabled"),
Input("button-run", "n_clicks"),
Input("button-run", "disabled"),
Input("button-play", "n_clicks"),
State("thickness", "value"),
State("width", "value"),
State("nel_x", "value"),
State("nel_z", "value"),
State("nlayers", "value"),
State("n_timesteps", "value"),
State("ThicknessLayers", "value"),
State("SpacingLayers", "value"),
State("last_timestep", "data"),
State("plot_field", "value"),
State("session-id", "data"),
State("viscosity_fold", "value"),
State("viscosity_matrix", "value"),
State("A0_rand", "value"),
State("A0_sin", "value"),
State("e_bg", "value"),
prevent_initial_call=true
) do n_run, active_run, n_play,
thickness, width, nel_x, nel_z, nlayers, n_timesteps,
ThicknessLayers, SpacingLayers,
last_timestep, plot_field, session_id,
viscosity_fold,viscosity_matrix,
A0_rand,A0_sin, e_bg
# print(layers)
# print(open_top)
trigger = get_trigger()
disable_interval = true
if trigger == "button-run.n_clicks"
cd(pkg_dir)
cur_dir = pwd()
base_dir = joinpath(pkgdir(FoldingTools),"src","FreeSubduction")
η_fold = 10.0^viscosity_fold
η_matrix = 10.0^viscosity_matrix
ε = e_bg
# We clicked the run button
user_dir = simulation_directory(session_id, clean=true)
cd(user_dir)
# Create the setup
model = create_model_setup(nx=nel_x, nz=nel_z, W=width/1e3, H=thickness/1e3,
Number_layers=nlayers, H0=ThicknessLayers/1e3, Spacing=SpacingLayers/1e3,
eta_matrix=η_matrix, eta_fold=η_fold,
nstep_max=n_timesteps,
A0_rand=A0_rand/1e3, A0_sin=A0_sin/1e3,
ε=ε,
)
run_lamem(model, cores, wait=wait)
cd(cur_dir) # return to main directory
disable_interval = false
elseif trigger == "button-run.disabled"
last_t = parse(Int, last_timestep)
if active_run == true || last_t < n_timesteps
disable_interval = false
end
elseif trigger == "button-play.n_clicks"
last_t = parse(Int, last_timestep)
# @show last_t
disable_interval = false
end
return disable_interval
end
# deactivate the button
callback!(app,
Dash.Output("button-run", "disabled"),
Dash.Output("button-run", "color"),
Input("button-run", "n_clicks"),
Input("session-interval", "n_intervals"),
State("last_timestep", "data"),
State("current_timestep", "data"),
prevent_initial_call=true
) do n_run, n_inter, last_timestep, current_timestep
cur_t = parse(Int, current_timestep) # current timestep
last_t = parse(Int, last_timestep) # last timestep available on disk
if cur_t < last_t
button_run_disable = true
button_color = "danger"
else
button_run_disable = false
button_color = "primary"
end
return button_run_disable, button_color
end
# Check if *.pvd file on disk changed and a new timestep is available
callback!(app,
Dash.Output("last_timestep", "data"),
Dash.Output("update_fig", "data"),
Input("session-interval", "n_intervals"),
Input("button-run", "n_clicks"),
State("current_timestep", "data"),
State("update_fig", "data"),
State("session-id", "data"),
prevent_initial_call=true
) do n_inter, n_run, current_timestep, update_fig, session_id
trigger = get_trigger()
user_dir = simulation_directory(session_id, clean=false)
if trigger == "session-interval.n_intervals"
if has_pvd_file(OutFile, user_dir)
# Read LaMEM *.pvd file
Timestep, _, Time = read_LaMEM_simulation(OutFile, user_dir)
# Update the labels and data stored in webpage about the last timestep
last_time = "$(Timestep[end])"
update_fig = "$(parse(Int,update_fig)+1)"
else
last_time = "0"
update_fig = "0"
end
elseif trigger == "button-run.n_clicks"
last_time = "0"
update_fig = "0"
end
return last_time, update_fig
end
# Update the figure if the signal is given to do so
callback!(app,
Dash.Output("label-timestep", "children"),
Dash.Output("label-time", "children"),
Dash.Output("current_timestep", "data"),
Dash.Output("figure_main", "figure"),
Dash.Output("plot_field", "options"),
Dash.Output("contour_option", "options"),
Input("update_fig", "data"),
Input("current_timestep", "data"),
Input("button-run", "n_clicks"),
Input("button-start", "n_clicks"),
Input("button-last", "n_clicks"),
Input("button-forward", "n_clicks"),
Input("button-back", "n_clicks"),
Input("button-play", "n_clicks"),
State("last_timestep", "data"),
State("session-id", "data"),
State("plot_field", "value"),
State("switch-contour", "value"),
State("contour_option", "value"),
State("switch-velocity", "value"),
State("color_map_option", "value"),
State("e_bg", "value"),
prevent_initial_call=true
) do update_fig, current_timestep, n_run, n_start, n_last, n_back, n_forward, n_play, last_timestep, session_id,
plot_field, switch_contour, contour_field, switch_velocity, color_map_option, e_bg
trigger = get_trigger()
# Get info about timesteps
cur_t = parse(Int, current_timestep) # current timestep
last_t = parse(Int, last_timestep) # last timestep available on disk
fig_cross = []
fields_available = ["phase"]
if trigger == "current_timestep.data" ||
trigger == "update_fig.data" ||
trigger == "button-start.n_clicks" ||
trigger == "button-last.n_clicks" ||
trigger == "button-back.n_clicks" ||
trigger == "button-forward.n_clicks" ||
trigger == "button-play.n_clicks"
user_dir = simulation_directory(session_id, clean=false)
if has_pvd_file(OutFile, user_dir)
Timestep, _, Time = read_LaMEM_simulation(OutFile, user_dir) # all timesteps
id = findall(Timestep .== cur_t)[1]
if trigger == "button-start.n_clicks" || trigger == "button-play.n_clicks"
cur_t = 0
id = 1
elseif trigger == "button-last.n_clicks"
cur_t = Timestep[end]
id = length(Timestep)
elseif (trigger == "button-forward.n_clicks") && (id < length(Timestep))
cur_t = Timestep[id+1]
id = id + 1
elseif (trigger == "button-back.n_clicks") && (id > 1)
cur_t = Timestep[id-1]
id = id - 1
end
# Load data
x, y, data, time, fields_available = get_data(OutFile, cur_t, plot_field, user_dir)
add_contours = active_switch(switch_contour)
if add_contours
x_con, y_con, data_con, _, _ = get_data(OutFile, cur_t, contour_field, user_dir)
else
x_con, y_con, data_con = x, y, data
end
# update the plot
add_velocity = active_switch(switch_velocity)
fig_cross = create_main_figure(OutFile, cur_t, x*1e3, y*1e3, data, x_con*1e3, y_con*1e3, data_con;
add_contours=add_contours, contour_field=contour_field,
add_velocity=add_velocity,
colorscale=color_map_option,
session_id=session_id,
field=plot_field, cmaps=cmaps)
if trigger == "current_timestep.data" || trigger == "update_fig.data" || trigger == "button-play.n_clicks"
if cur_t < last_t
cur_t = Timestep[id+1] # update current timestep
end
end
else
time = 0
end
elseif trigger == "button-run.n_clicks"
cur_t = 0
time = 0.0
end
# update the labels
label_timestep = "Timestep: $cur_t"
label_time = "Time: $time Myrs"
current_timestep = "$cur_t"
# @show current_timestep
println("Timestep ", current_timestep)
return label_timestep, label_time, current_timestep, fig_cross, fields_available, fields_available
end
#
callback!(app,
Dash.Output("contour_option", "disabled"),
Input("switch-contour", "value")) do switch_contour
if !isnothing(switch_contour)
if isempty(switch_contour)
disable_contours = true
else
disable_contours = false
end
else
disable_contours = true
end
return disable_contours
end
run_server(app, host, port, debug=false)
end
end
| InteractiveGeodynamics | https://github.com/JuliaGeodynamics/InteractiveGeodynamics.jl.git |
Subsets and Splits
No community queries yet
The top public SQL queries from the community will appear here once available.